Introduction to Medical Imaging Lecture 12: MRI Imaging - Computer

3010 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Imaging Small PEC Spheres by a Linear δ ApproachRaffaele Solimene, Aniello Buonanno, and Rocco Pierri
Abstract—The problem of localizing small inhomogeneitiesfrom the knowledge of their scattered field is dealt with. Inparticular, the case of small perfect electric conducting spheresis of concern, with the scattered field data collected undermultistatic/multifrequency/single-view or multistatic/single-frequency/multiview far zone configurations. The multiplescattering between the spheres is neglected, and their locationsare represented as the supports of the Dirac δ functions. Thisallows one to cast the problem as the inversion of a linear integraloperator, with the δ functions being the unknowns of the problem.The inversion of this linear integral operator is achieved by meansof the truncated singular value decomposition. The performanceof the linear inversion algorithm against the model error (i.e.,for situations where the multiple scattering is not negligible) isinvestigated by numerical simulations. Furthermore, the effect ofnoise is also analyzed by corrupting the data by an uncorrelatedadditive white Gaussian process.
Index Terms—Electromagnetic inverse scattering problems, sin-gular value decomposition, 3-D imaging.
I. INTRODUCTION
IN THIS paper, the electromagnetic inverse scattering prob-lem of imaging strong scattering Rayleigh objects [1] repre-
senting small (in terms of the wavelength) perturbations of thebackground medium is considered.
This problem can occur in different contexts such as in med-ical imaging [2], [3], in ground-penetrating radar prospection[4], in seismic applications [5], and in remote sensing [6], toquote only a few of examples.
As a representative situation of the aforementioned contexts,we consider the canonical case of perfect electric conducting(PEC) small spheres having radii much smaller than the wave-length [7]. Furthermore, we assume the scatterers to be embed-ded in a homogeneous background medium (the free space)with the understanding that configurations that are pertinentto the previously mentioned applications require this paper tobe modified by properly accounting for the relevant Green’sfunction.
When the scattering metallic objects are extended (that is,their dimensions are large in terms of the wavelength), theproblem is cast as a shape reconstruction [8].
For this paper, the problem amounts to retrieving the numberof the small scatterers and their positions. Of course, the scatter-ers’ “strengths” can also be of concern, the latter being relatedto the size and the conductivity of the scatterers [9]. Here, we
Manuscript received October 1, 2007; revised December 26, 2007. Currentversion published October 1, 2008.
The authors are with the Dipartimento di Ingegneria dell’Informazione,Seconda Università degli Studi di Napoli, 81031 Aversa, Italy (e-mail:[email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TGRS.2008.919273
consider only the problem of scatterer localization, the latterbeing PEC spheres with unknown and, generally, different radii.
As is well known, the problem at hand is nonlinear and illposed [10], [11]. Notwithstanding, we chose to adopt a linearinversion scheme. This is because linear inversion schemes arecomputationally more effective (this is a very desirable featureof the inversion scheme, particularly for a 3-D geometry) andthe problem can be easily regularized by adopting the well-assessed regularization theory of linear ill-posed problems [12].Moreover, when the aim is to obtain “only” a “qualitative”reconstruction of the scatterers (in terms of their geometricalfeatures), it has been shown that linear inversion schemes workwell beyond the limits of the models upon which they are based(see, for example, [11] and [13]).
Accordingly, we exploit a linear inversion algorithm obtainedin the following way. First, the multiple scattering betweenthe different small objects is neglected. However, this does notyield yet the wanted linear relationship between the scatteredfield data and the unknown scatterers’ positions, consideringthat the latter appear as the argument of the relevant Green’sfunction. Then, the positions of the scatterers are represented asthe support of Dirac δ distributions. This allows one to establisha linear integral relationship between the scattered field and theunknowns, which are now given by the δ functions. Hence,a truncated singular value decomposition (TSVD) scheme isadopted to obtain a stable inversion [12]. We call this inversionscheme the linear distributional approach. This kind of problemhas been already addressed for the case of the so-called “thin”objects, using both synthetic and experimental data [11], [14].There, cylindrical PEC thin scatterers and, hence, a 2-D geom-etry were considered. Thus, in this paper, we extend such ananalysis to the more involved and realistic situation of a 3-Dgeometry.
It is worth remarking that many different imaging algorithmshave been developed to tackle the problem at hand. A nonex-haustive list includes the so-called backpropagation algorithm[15], the migration [6], [16], and the time-reversal imaging[17], [18]. These reconstruction schemes have similar rootseven though they arose from different scientific contexts. Theycan be implemented by means of fast Fourier transform (FFT)[6], although resampling the data spectrum is required [19].Accordingly, they generally have a lower computational costthan our approach which requires the SVD computation, whichis known to be time consuming. However, this is rigorously truefor the lossless cases. Indeed, in lossy scenarios, losses shouldbe considered in the inversion procedure, and this impairs thepossibility of adopting only an FFT [20]. Instead, our methodremains unchanged; it is just sufficient to modify the wavenum-ber in the pertinent operator to be inverted so as to account forthe losses [21].
0196-2892/$25.00 © 2008 IEEE

SOLIMENE et al.: IMAGING SMALL PEC SPHERES BY A LINEAR δ APPROACH 3011
A further class of inversion algorithms is the one founded onsome spectral estimation technique. An example is the time-reversal MUSIC algorithm which was originally developedunder a linearization of the scattering phenomenon [22] butwhich also works in the presence of mutual scattering [10].Its recent 3-D version is reported in [23]. MUSIC allows theachievement of very high resolution as compared with thepreviously listed methods, but it is more sensitive to the noise,as stated in [10] and as confirmed in [23], where a higher (thanthe one adopted in this paper) signal-to-noise ratio (SNR) isexploited.
It is also worth mentioning the maximum likelihood nonlin-ear approach reported in [24], which returns an asymptoticallyunbiased and efficient estimator of the scatterers’ positions.However, as it requires one to tackle a nonlinear optimizationproblem, it can have a high computational cost and can sufferfrom the so-called false solutions [25] which affect the reliabil-ity of the entire estimation procedure.
The following configuration is considered. The scatterers areassumed to be embedded in free space and residing withina parallel-piped investigation domain. The incident field isprovided by plane waves having a fixed direction of incidenceand varying frequency (multifrequency/multiview configura-tion) or fixed frequency and varying direction of incidence(single-frequency/multiview configuration). The scattered fieldis collected over a bounded domain of a concentric (concentricto the investigation domain) sphere located in the far-field zone.
In order to assess the performances achievable by the in-version algorithm, the latter is checked against synthetic data.In detail, the synthetic data are generated independently fromthe scattering model used to develop the inversion algorithmby means of the generalized Mie theory [26]–[29] in theRayleigh approximation hypothesis. This way, the so-calledinverse crime is avoided. Furthermore, this allows one to havedata which also account for the contribution arising from themutual scattering, which becomes significant as the scatterersare more closely located or as their number increases. Thisallows the numerical testing of the effect of the multiple scat-tering on the linear inversion scheme. Finally, cases of datacorrupted by an additive white Gaussian noise (AWGN) are alsoconsidered.
This paper is organized as follows. In Section II, a modelfor the scattering by a cluster of small PEC spheres based ona multipole expansion accounting for the mutual scattering isreported. In Section III, the linear distributional approach ispresented. In Section IV, the inversion algorithm is introduced,and the role of ESθ and ESφ (the two far zone componentsof the scattered field) is discussed. In Section V, numericalexamples are shown, and the role of mutual scattering and ofthe noise is analyzed. Summarizing conclusions end this paper.
II. EXACT SCATTERED FIELD
In this section, we report the forward model to calculatethe field scattered by an ensemble of small spherical PECscatterers. Such a problem has been extensively studied, andmany contributions are widespread in the literature. A veryextended picture about such a problem can be found in [26].
Fig. 1. Geometry of the problem.
Let us consider L perfectly conducting small spheres hav-ing different radii al embedded in free space. The posi-tions of the centers of such spheres are denoted as r0
l =(x0
l , y0l , z0
l ), with l = 1, . . . , L (see Fig. 1). Assume, now, thatthe cluster of scatterers is illuminated by a plane wave havingthe wave vector equal to k = k(sin θi cos φix, sin θi sin φiy,cos θiz), with x, y, and z being the unit vectors of the “global”Cartesian reference frame (as opposed to the local referenceframes used later on, which are parallel to the global onebut have their origin reference points centered at the scat-terer’ positions r0
l ). Furthermore, k = 2π/λ is the free-spacewavenumber, and λ is the working wavelength. Moreover, theincident plane wave is considered to be of unitary amplitudewith TM polarization, that is, the electric field lies within theplane of incidence identified by the z-axis and k.
The electric field ElS scattered by the lth PEC sphere can be
expressed, in its local reference system (i.e., the one centeredin r0
l ), as
ElS(k, θi, φi, rl) =
∞∑n=1
n∑m=−n
−jEnm
×[al
nm(θi, φi)N (4)nm(k, rl) + bl
nm(θi, φi)M (4)nm(k, rl)
](1)
where N (4)nm(k, rl) and M (4)
nm(k, rl) are the vector sphericalfunctions of the fourth kind [27], Enm represents known co-efficients used for keeping the formulation of the multisphere-scattering theory consistent with that of the Mie theory [27],and al
nm(θi, φi) and blnm(θi, φi) are the scattering coefficients
of the spherical harmonic expansion in the local reference framethat is pertinent to the lth scatterer. Finally, rl is the obser-vation point position in the same reference frame mentionedpreviously.
A similar expansion in spherical harmonics holds for theincident field as well.

3012 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Considering that we have assumed that the spheres are small,that is, al � λ, then the first terms of the spherical harmonicexpansion (1) dominate the higher order ones. Accordingly, (1)can be simplified as
ElS(k, θi, φi, rl) =
1∑m=−1
−jEm
×[al
m(θi, φi)N (4)m (k, rl) + bl
m(θi, φi)M (4)m (k, rl)
](2)
which is equivalent to the Rayleigh approximation [1]. In par-ticular, to simplify the notation in (2), we have set Em = E1m,N (4)
m = N(4)1m, M (4)
m = M(4)1m, al
m = al1m, and bl
m = bl1m.
Now, given the incident field, the scattered field is knownwhen the expansion coefficients al
ms and blms have been deter-
mined. To this end, the boundary conditions have to be forcedover each PEC scatterer surface. This leads to the followingsystem of equations:
rl ×[El
inc(k, θi, φi, rl) +L∑
p=1
EpS(k, θi, φi, rl)
]∣∣∣∣∣rl=al
= 0,
l = 1, . . . , L (3)
where it is imposed that the total tangential electric field overeach scatterer surface vanishes and rl denotes the modulus ofrl. Ep
S is the field scattered by the pth scatterer evaluated overthe surface of the lth scatterer, and the “×” symbol here denotesthe external product.
Now, by accounting for the multipole expansion in (2) andthe results reported in [27], (3) can be recast as shown at thebottom of the page, where hl
m = hl1m and ql
m = ql1m are the
spherical harmonic expansion coefficients of the incident fieldin the lth reference frame [28], al = al
1 and bl = bl1 are the
Mie coefficients [27] of the isolated lth sphere, and Aplmμ =
Aplm1μ1 and Bpl
mμ = Bplm1μ1 are the so-called vector translation
coefficients [29] characterizing the translation from the pthto the lth coordinate system as indicated by the two integersappearing as superscript indexes. Moreover
rpl = r0l − r0
p
=(x0
l − x0p
)x +
(y0
l − y0p
)y +
(z0l − z0
p
)z
θpl = arccos
[z0l − z0
p
rpl
]
φpl = arctan
[y0
l − y0p
x0l − x0
p
]
Fig. 2. Geometrical parameters pertinent to the global and local referenceframes.
(see Fig. 2 for a pictorial view of the geometrical parametermeaning).
Interestingly, (4), shown at the bottom of the page, clarifiesthe role played by the mutual scattering, which is accounted forby the summations appearing as the second terms of the right-hand side of both lines of such an equation. Hence, to find theexpansion coefficients, (4) has to be solved. Having done it andby further assuming that the scattered field is observed in thefar zone, the electric far-field scattered from the L small PECspheres can be written as
ESθ(k, θi, φi, θO, φO)
=L∑
l=1
exp[jkΔl(θO, φO)
]×
1∑m=−1
Em
×[al
m(θi, φi)τm(cos θO) + blm(θi, φi)ηm(cos θO)
]× exp(−jmφO) (5)
ESφ(k, θi, φi, θO, φO)
=L∑
l=1
exp[jkΔl(θO, φO)
]×
1∑m=−1
−jEm
×[al
m(θi, φi)ηm(cos θO) + blm(θi, φi)τm(cos θO)
]× exp(−jmφO) (6)
where × now denotes the usual arithmetic product sign and thescattered far field ES has been expressed in terms of the global
⎧⎪⎪⎨⎪⎪⎩
alm(θi, φi) = al
[hl
m(θi, φi) −∑L
p=1,p�=l
∑lμ=−l A
plmμ(rpl, θpl, φpl)ap
μ(θi, φi) + Bplmμ(rpl, θpl, φpl)bp
μ(θi, φi)]
blm(θi, φi) = bl
[qlm(θi, φi) −
∑Lp=1,p�=l
∑lμ=−l B
plmμ(rpl, θpl, φpl)ap
μ(θi, φi) + Aplmμ(rpl, θpl, φpl)bp
μ(θi, φi)]
l = 1, . . . , L
(4)

SOLIMENE et al.: IMAGING SMALL PEC SPHERES BY A LINEAR δ APPROACH 3013
reference frame and is denoted by the means of its compo-nents ESθ and ESφ, which, in turn, have been normalized to thenonessential spherical factor exp(−jkrO)/(krO). Moreover,rO, θO, and φO refer to the observation point and
Δl = rO ·r0l
=x0l sin θO cos φO+y0
l sin θO sinφO+z0l cos θO
τm(cos θO)=d
dθOPm
1 (cos θO)
ηm(cos θO)=m
sin θOPm
1 (cos θO)
with Pm1 (cos θO) being the associated Legendre functions
of first kind, order m and degree 1. Moreover, rO =sin θO cos φOx + sin θO sin φOy + cos θO z is the observationdirection expressed in terms of the global reference frame.
Eventually, (5) and (6) represent the model we adopt to ob-tain the synthetic exact data against which we test the inversionalgorithm.
III. LINEAR DISTRIBUTIONAL APPROACH
In this section, we present the linear distributional approachwhich allows one to cast the problem as the inversion of a linearoperator.
It is apparent from (4)–(6) that the scattered field and the scat-terer positions are linked by a nonlinear mathematical relation-ship. As is well known, nonlinearity stems from the presence ofthe mutual scattering. Therefore, in order to cast the problemas a linear inversion, the first step is to neglect the multipleinteractions between the scatterers. Physically, this implies anassumption that each scatterer interacts with the incident fieldas if it were alone in the free space. From a mathematical pointof view, this means to neglect the summations appearing in (4),which, as previously noted, account for the mutual scattering.Accordingly, (4) can be rewritten as
⎧⎨⎩
alm(θi, φi) = alhl
m(θi, φi)blm(θi, φi) = blql
m(θi, φi)l = 1, . . . , L
(7)
and the scattered far-field expressions in (5) and (6) aresimplified as
ESθ(k, θi, φi, θO, φO)
= k3 [(cos θi cos θO − 1/2) cos(φO − φi) + sin θi sin θO]
×L∑
l=1
a3l exp
[jk(sin θO cos φO − sin θi cos φi)x0
l
]
× exp[jk(sin θO sin φO − sin θi sin φi)y0
l
× exp(cos θO − cos θi)z0l )
](8)
for the component along θ and
ESφ(k, θi, φi, θO, φO)= k3 [1/2(cos θO − cos θi) sin(φO − φi)]
×L∑
l=1
a3l exp
[jk(sin θO cos φO − sin θi cos φi)x0
l
]× exp
[jk(sin θO sin φO − sin θi sin φi)y0
l
× exp (cos θO − cos θi)z0l )
](9)
for the φ component.Despite the facts that the mutual scattering has been ne-
glected, (8) and (9) do not yet give a linear relationship fromthe data and our unknowns. Indeed, the unknown scatterers’positions appear as the arguments of the exponential termsinvolved in such equations. However, by representing the un-known spheres’ positions r0
l as the support of δ functions, wecan rewrite (8) and (9) as
ESθ(k, θi, φi, θO, φO) = fθ(k, θi, φi, θO, φO)∫∫∫
D
γ(x, y, z)
× exp [−j(ux + νy + wz)] dxdydz
(10)
ESφ(k, θi, φi, θO, φO) = fφ(k, θi, φi, θO, φO)∫∫∫
D
γ(x, y, z)
× exp [−j(ux + νy + wz)] dxdydz
(11)
where u = −k(sin θO cos φO − sin θi cos φi), ν = −k(sin θO
sinφO − sin θi sin φi), w = −k(cos θO − cos θi), fθ and fφ
are the multiplicative functions appearing in front of the sum-mations in (8) and (9), respectively, r ≡ (x, y, z) ∈ D, and D isthe investigation domain within which, we have known a priori,the scatterers reside. Finally
γ(r) =L∑
l=1
a3l δr0
l(r) (12)
with δr0l(r) = δ(r − r0
l ) accounts for the positions and the radiiof the scatterers and is the actual unknown of the problem.Accordingly, now, our problem amounts to invert the linearoperator for γ
A : γ∈D′ → (ESθ =fθFDγ,ESφ =fφFDγ)∈L22(O) (13)
where D′ is the set of distributions whose supports are in D, FD
is the Fourier transform operator compactly supported over D,and L2
2(O) is the Hilbert space composed of vectors of complexfunctions g ≡ (gθ, gφ) defined on O, where gθ and gφ belongto the set of square integrable functions L2(O). The latter is thedomain where the scattered field is observed. In particular, forthe multiview case, O = [φimin, φimax] × [φO min, φO max] ×[θimin, θimax] × [θO min, θO max], whereas for the multifre-quency configuration, O = [kmin, kmax] × [φO min, φO max] ×[θO min, θO max], and the impinging direction is along they-axis.

3014 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Equation (13) represents the so-called linear distributionalmodel upon which the inversion algorithm we are going topresent and analyze is based.
IV. INVERSION PROCEDURE
To perform the inversion of (13), we extend the two-step-based inversion algorithm exploited for the case of cylindricalscatterers [11] to the present 3-D problem.
In the first step, the distribution is reconstructed by inverting(13) by means of a TSVD procedure [12]. In more detail, forexample, {vn, σn, un}∞n=0, which is the singular system of suchan operator, the reconstruction is obtained by evaluating
γ =NT∑n=0
〈ES , vn〉σn
un (14)
where γ is the reconstructed version of the unknown, 〈·, ·〉denotes the scalar product in the data space L2
2(O), and NT
is the truncation index which is chosen, establishing a com-promise between the achievable resolution and the stability ofthe reconstruction against the noise (uncertainties) corruptingES [12]. In particular, it can be shown that ESφ plays a minorrole, with respect to ESθ, in the reconstruction. To see this, wecompare the singular value behavior as well as the inversionscheme point-spread function (PSF) (i.e., the reconstructionof a point like scatterer) of the operator (13) (where bothESθ and ESφ are accounted for) with the ones obtained byconsidering only ESθ. In the latter case, we denote the pertinentsingular system as {vθn, σθn, uθn}∞n=0 and the correspondingregularized reconstruction as
γθ =NT∑n=0
〈ESθ, vθn〉σθn
uθn. (15)
Note that when only ESθ is exploited, the singular functionsspanning the data functional space are no longer vectorial, andthe inverse problem becomes scalar.
The PSF for the two cases, respectively, are
PSF(r, r′) =NT∑n=0
u∗n(r′)un(r) (16)
PSFθ(r, r′) =NT∑n=0
u∗θn(r′)uθn(r) (17)
where r′ is the point scatterer’s position, r ranges within theinvestigation domain, and the relationship (〈ES , vn〉)/σn =〈δr′ , un〉 = u∗
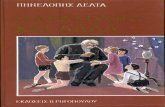
n(r′) has been exploited in (14) to obtain (16)[the same has been done for obtaining (17)]. The outcomeof such a comparison is reported in Figs. 3 and 4 for themultifrequency/single-view configuration.
As demonstrated, the singular values σn and σθn are verysimilar. Moreover, the corresponding PSFs are practically co-incident. Analogue results that hold for the single-frequency/multiview configuration in this paper are omitted. Accordingly,to achieve the reconstructions, we will only adopt ESθ. The
Fig. 3. Single-view/multifrequency configuration with θO ∈ [0, π]rad,φO ∈ [π, 2π]rad, and k ∈ [2π, 8π]m−1. Normalized singular value behav-iors for (dotted line) σn and (solid line) σθn.
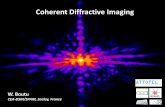
Fig. 4. Normalized PSFs obtained with NT = 1150. (Dotted line) γ. (Solidline) γθ . The parameters of the configuration are those as for Fig. 3, and λmax
is the wavelength corresponding to the lowest employed frequency.
achievable resolution which, as was previously mentioned,depends on the allowable truncation index NT is shown inFig. 4. The latter depends on the noise and, of course, on theobservation range.
The second step of the inversion procedure consists of intro-ducing a threshold below which the reconstruction is discarded.The aim is to curtail spurious artifacts which are due to thesmoothing introduced by the regularization procedure and tothe noise. This point is detailed in Section V-C.
V. NUMERICAL RECONSTRUCTIONS
In this section, we report some numerical reconstructionsobtained by exploiting synthetic data. In particular, in orderto check the inversion algorithm against the mutual scattering,we perform a comparative study by employing both “model”and “exact” data. Moreover, to test the inversion algorithmagainst the noise, data corrupted by an AWGN noise, η, arealso considered. In more detail, data are corrupted by addingto the real and the imaginary parts of the scattered field twoindependent zero-mean white Gaussian noise processes with a

SOLIMENE et al.: IMAGING SMALL PEC SPHERES BY A LINEAR δ APPROACH 3015
Fig. 5. Normalized multifrequency reconstructions. (Left side) Linear data.(Right side) Exact data. (Top panels) Cut view at z = 0.7 λmax, (middlepanels) z = 0, and (bottom panels) z = −0.7 λmax. No noise has been added,and no threshold is employed.
Fig. 6. Normalized multiview reconstructions. (Left side) Linear data. (Rightside) Exact data. (Top panels) z = λ. (Middle panels) z = 0. (Bottom panels)z = λ. No noise has been added, and no threshold is employed.
standard deviation η0 equal to α times the maximum of eachscattered field.
A. Effect of Mutual Scattering
We first address the role of mutual scattering on the re-constructions. The comparison between the reconstructionsobtained by linear and the exact data is shown in Fig. 5 for themultifrequency configuration and in Fig. 6 for the multiviewcase. In particular, the multifrequency reconstructions havebeen obtained by exploiting the same parameters as adoptedin Figs. 3 and 4. Although the multiview reconstructions havebeen obtained for θO, θi ∈ [0, π]rad, φO ∈ [π, 2π]rad, φi ∈[0, π]rad, and k = 4πm−1, NT is still equal to 1150. We
considered D = [−xM , xM ] × [−yM , yM ] × [−zM , zM ], withxM = yM = zM = λmax as the investigation domain in themultifrequency case (λmax being the wavelength correspondingto the lowest employed frequency) and xM = yM = zM = 2λfor the multiview configuration. We considered an ensem-ble of 3 × 3 × 3 spherical PEC scatterers that are uniformlydistributed within a box with sides 1.4λmax and 2λ for themutifrequency and multiview cases, respectively. Moreover, thescatterers’ radii are all set equal to λmax/20 and λ/10, re-spectively, to compute the scattered field in the multifrequencyand the multiview cases. However, they are unknown for thereconstruction procedure.
As can be seen in both cases, the scatterers are very well lo-calized and discerned. In particular, from the right side of Fig. 5,it can be appreciated that under a multifrequency configuration,mutual scattering mainly entails a sort of masking effect forthe more deeply located scatterers (in the sense that they arereconstructed more weakly). Instead, for the multiview case, themain observable effect is the enhancement of spurious artifacts(see Fig. 6). However, the mutual scattering is more relevantfor the multifrequency configuration. This is confirmed by themodel error ‖EMOD
Sθ − EEXSθ ‖/‖EMOD
Sθ ‖100 (EEXSθ and EMOD
Sθ
being returned by (5) and (8), respectively) which is of about29% and 10% for the multifrequency and the multiview cases,respectively. Therefore, although the scatterers are more closelylocated (note that in the multifrequency case the distance be-tween two adjacent scatterers is 0.7λmax, which is twice theone for the multiview configuration) in the multiview case, themodel error is lower. We point out that these results are per-fectly consistent with the study reported in [11], where the caseof “thin” scatterers (that is cylindrical scatterers) was tackled.
B. Scatterers With Different Radii
We turn to show some examples where the scatterers havedifferent radii. We consider the same scatterer configuration asin Fig. 5 for both the adopted configurations (i.e., the distancebetween two adjacent scatterers is 0.7λmax for the multifre-quency case and 1.4λ in the multiview case). Now, however, thescatterers have different radii. In particular, the first nine scatter-ers having y = −0.7λmax for the multifrequency configurationand y = −λ for the multiview case, have all a radius equalto 0.6 times the one of the previous case (i.e., 0.6λmax/20 forthe multifrequency configuration and 0.6λ/10 for the multiviewcase). The nine scatterers located in the middle at y = 0 (forboth the configurations) have radius equal to 0.8 times theone of the previous section. Finally, the last nine scattererslocated at y = 0.7max for the multifrequency configuration andy = λ for the multiview case have the same radius as of theprevious section. The cut view at z = 0 of the correspondingreconstructions are shown in Fig. 7 (the other cut views are verysimilar and are not shown).
As could be expected, the scatterers having smaller radii aremore weakly reconstructed. This entails that when they arelocated behind other scatterers, their detection could becomeharder. This situation is shown in Fig. 8, where the samecase as in Fig. 7 is addressed; now, however, the order of thescatterers is reversed, which is in the sense that there are, first,

3016 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Fig. 7. Cut view at z = 0 of the reconstruction of scatterers having differentradii. (Top panel) Multifrequency case adopting the same configuration parame-ters as those in Fig. 5. (Bottom panel) Multiview case adopting the sameconfiguration parameters as those in Fig. 6. Exact data are employed, and nothreshold is used.
Fig. 8. Same as in Fig. 7 but now, the more strongly scattering objectsare placed in front. (Top panel) Multifrequency case. (Bottom panel) Multi-view case.
the bigger spheres and then the smaller ones. As is evidentdue to the mutual scattering in the multifrequency case (toppanel of Fig. 8), the reconstruction of the smaller PEC spheresis lower than the previous case. However, according to theanalysis of previous section, this circumstance does not occurfor the multiview configuration. Hence, we conclude that fromthis point of view, the multiview configuration works better thanthe multifrequency one.
C. Threshold Procedure
Because of the truncation of the SVD reconstruction (15) andthe noise, which unavoidably “adds” to data, spurious artifactsappear in the reconstructions. Such artifacts might be mitigatedby adopting a threshold in the reconstructions. In particular,artifacts due to the smoothing introduced by the regularization
procedure can be counteracted by setting a threshold τS that isjust above the PSF sidelobe level (as done in [11]), whereas thethreshold concerning the noise artifacts τN can be set accordingto their tolerable probability of false alarms [30]. The actualthreshold to be employed is then set as the maximum between(τS , τN ). However, while τS depends on the scatterers’ radii,τN does not. Therefore, because of the radius of the scatterersis not a priori known, only τN can be adopted. In particular, τN
is given by [30]
τN =√
varζ ln(1/PFA) (18)
where ln(·) denotes the natural logarithm, PFA is the acceptedprobability of false alarms, and
varζ =NT∑n=0
2η20
σ2θn
|uθn|2 (19)
is the variance of the noise process in the reconstruction(evaluated in one of the points of the investigation domain,considering that it is constant for all the other positions), wherethe latter is given by
ζ(r) =NT∑n=0
〈η, vθn〉σθn
uθn(r). (20)
However, such a threshold choice could lead one to discardsome scatterers as well, mainly the smaller ones. To avoid thiscircumstance, we chose to base the threshold on the probabilityof detection PD.
To this end, it can be exploited that [31]
PD = Q
(A
√varζ,
τ√varζ
)(21)
where Q(·, ·) is the Marcum’s Q function, τ is the adoptedthreshold, and A is the amplitude of the reconstruction. Ac-cordingly, (21) returns the probability, that the reconstruction,having amplitude A, is above τ . In particular, if we know thesmaller radius, we can set A as the maximum amplitude of itsreconstruction (when it is alone within the scattering scene) anddetermine the threshold so as to have the corresponding PD
equal to one. Conversely, when the threshold τ is fixed, onecan estimate which is the smaller detectable scatterer.
The previous discussion does not yet account for the roleof the mutual scattering. First, mutual scattering can be, byitself, the source of artifacts. However, it is not possible to seta properly devised threshold, considering that it should dependon the scatterers’ positions, which are unknown. Second, therelationship between the scatterer’s radius and the amplitude ofthe corresponding reconstruction, which is known in the linearcase, becomes invalid when the mutual scattering is significant;this is particularly true for the multifrequency case.
We now test the proposed threshold procedure by consideringthe situations shown in Figs. 7 and 8, with data corrupted byAWGN and with α equal to 5% the maximum of the amplitude

SOLIMENE et al.: IMAGING SMALL PEC SPHERES BY A LINEAR δ APPROACH 3017
Fig. 9. Same as in Fig. 8 but with AWGN noise and threshold. (Top panel)Multifrequency case. (Bottom panel) Multiview case.
Fig. 10. Same as in Fig. 9 but with AWGN noise and threshold. (Top panel)multifrequency case. (Bottom panel) Multiview case.
of the scattered field. This corresponds to having, for theconsidered cases, an SNR 20 log10[‖ESθ‖/‖η‖] of about 5 dB.
It can be shown that for the considered cases, the threshold,which can be applied, is about −13 dB in the normalized recon-structions, and the corresponding thresholded reconstructionsare shown in Figs. 9 and 10. As demonstrated, the threshold ishelpful in removing spurious artifacts. However, it also removessome of the scatterers (see Fig. 10, top panel) in the multifre-quency case. This is because, as we pointed out, the estimateof the reconstruction maximum is wrong due to the mutualscattering effect.
Once again, we conclude that the multiview configurationperforms better than the multifrequency one.
VI. CONCLUSION
The problem of imaging “small” PEC spheres from theknowledge of the scattered far field has been tackled for
multistatic/multifrequency/single-view and multistatic/single-frequency/multiview reflection mode configurations.
A linear δ function approach has been presented. In par-ticular, the single-scattering approximation for the scatteringphenomenon has first been considered. Then, the unknownpositions of the scatterers have been represented as the supportsof Dirac δ distributions. This has led to the inversion of ascalar linear integral operator that we have tackled by meansof the TSVD inversion scheme. A threshold procedure hasbeen suggested to counteract spurious artifacts appearing in thereconstructions.
The performances that are achievable by the inversion al-gorithm have been checked against the model error, whichis due to reciprocal scattering, and the noise by means ofnumerical reconstructions. Furthermore, the case of scatterershaving different unknown radii has been considered.
The inversion algorithm has been proven to work well inlocalizing the small scatterers, for a high level of model error,and for relatively low SNR.
However, it has been shown that the multifrequency config-uration is more sensitive to the effect of reciprocal scatteringthan the multiview one. In particular, in this case, mutualscattering entails a masking effect which makes it more difficultto detect scatterers which are more deeply located along the di-rection of incidence, particularly when they are smaller than theother ones.
REFERENCES
[1] R. E. Kleinmann, “The Rayleigh region,” Proc. IEEE, vol. 53, no. 8,pp. 848–856, Aug. 1965.
[2] Y. Xie, B. Guo, J. Li, and P. Stoica, “Novel multistatic adaptive microwaveimaging methods for early breast cancer detection,” EURASIP J. Appl.Signal Process., vol. 2006, no. 20, pp. 1–13, 2006.
[3] T. Rubaek, P. M. Meaney, P. Meincke, and K. D. Paulsen, “Nonlinearmicrowave imaging for breast-cancer screening using Gauss–Newton’smethod and CGLS inversion algorithm,” IEEE Trans. Antennas Propag.,vol. 55, no. 8, pp. 2320–2331, Aug. 2007.
[4] A. Sahin and E. L. Miller, “Object detection using high resolution near-field array processing,” IEEE Trans. Geosci. Remote Sens., vol. 39, no. 1,pp. 136–141, Jan. 2001.
[5] H. P. Valero, G. Saracco, and D. Gilber, “Three-dimensional seismicendoscopy. I. Design of apparatus and basic imaging algorithms,” IEEETrans. Geosci. Remote Sens., vol. 39, no. 10, pp. 2262–2274, Oct. 2001.
[6] J. M. Lopez-Sanchez and J. Fortuny-Guash, “3-D radar imaging usingrange migration techniques,” IEEE Trans. Antennas Propag., vol. 48,no. 5, pp. 728–737, May 2000.
[7] R. Solimene, A. Buonanno, G. Leone, and R. Pierri, “Localizing metallicsmall spheres by a linear distributional approach,” in Proc. IEEE Int.Geosci. Remote Sens. Symp., Barcelona, Spain, 2007, pp. 350–353.
[8] F. Soldovieri, A. Brancaccio, G. Leone, and R. Pierri, “Shape reconstruc-tion of perfectly conducting objects by multiview experimental data,”IEEE Trans. Geosci. Remote Sens., vol. 43, no. 1, pp. 65–71, Jan. 2005.
[9] E. A. Marengo and F. K. Gruber, “Noniterative analytical formula forinverse scattering of multiply scattering point targets,” J. Acoust. Soc.Amer., vol. 120, no. 6, pp. 3782–3788, Dec. 2006.
[10] F. K. Gruber, E. A. Marengo, and A. J. Devaney, “Time-reversal imagingwith multiple signal classification considering multiple scattering betweenthe targets,” J. Acoust. Soc. Amer., vol. 115, no. 6, pp. 3042–3047,Jun. 2004.
[11] R. Pierri, R. Solimene, A. Liseno, and J. Romano, “Linear distributionimaging of thin metallic cylinders under mutual scattering,” IEEE Trans.Antennas Propag., vol. 53, no. 9, pp. 3019–3029, Sep. 2005.
[12] M. Bertero and P. Boccacci, Introduction to Inverse Problems in Imaging.Bristol, U.K.: Inst. Phys., 1998.
[13] R. Pierri, A. Liseno, R. Solimene, and F. Soldovieri, “Beyond physicaloptics SVD shape reconstruction of metallic cylinders,” IEEE Trans.Antennas Propag., vol. 54, no. 2, pp. 655–665, Feb. 2006.

3018 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
[14] R. Solimene, A. Brancaccio, J. Romano, and R. Pierri, “Localizationof thin metallic scatterers by experimental data,” in Proc. 4th IWAGPR,Naples, Italy, 2007, pp. 117–121.
[15] A. J. Devaney, “Geophysical diffraction tomography,” IEEE Trans.Geosci. Remote Sens., vol. GRS-22, no. 1, pp. 3–13, Jan. 1984.
[16] C. L. Leuschen and R. G. Plumb, “A matched-filter-based reverse-timemigration algorithm for ground-penetrating radar data,” IEEE Trans.Geosci. Remote Sens., vol. 39, no. 5, pp. 929–936, May 2001.
[17] M. Fink, “Time reversal of ultrasonic fields. I. Basic principles,” IEEETrans. Ultrason., Ferroelectr., Freq. Control, vol. 39, no. 5, pp. 555–566,Sep. 1992.
[18] D. Liu, J. Krolik, and L. Carin, “Electromagnetic target detection inuncertain media: Time-reversal and minimum-variance algorithms,” IEEETrans. Geosci. Remote Sens., vol. 45, no. 4, pp. 934–944, Apr. 2007.
[19] J. Song, Q. H. Liu, P. Torrione, and L. Collins, “Two-dimensional andthree-dimensional NUFFT migration method for landmine detection usingground-penetrating radar,” IEEE Trans. Geosci. Remote Sens., vol. 44,no. 6, pp. 1462–1469, Jun. 2006.
[20] P. Meincke, “Linear GPR inversion for lossy soil and a planar air–soilinterface,” IEEE Trans. Geosci. Remote Sens., vol. 39, no. 12, pp. 2713–2721, Dec. 2001.
[21] A. Brancaccio, G. Leone, F. Soldovieri, and R. Pierri, “Localization ofinterfaces embedded in a half-space by a linear inverse scattering algo-rithm,” IEEE Trans. Geosci. Remote Sens., vol. 45, no. 11, pp. 3662–3671,Nov. 2007.
[22] S. K. Lehman and A. J. Devaney, “Transmission mode time-reversalsuper-resolution imaging,” J. Acoust. Soc. Amer., vol. 113, no. 5,pp. 2742–2753, May 2003.
[23] Y. Zhong and X. Chen, “MUSIC imaging and electromagnetic inversescattering of multiple-scattering small anisotropic spheres,” IEEE Trans.Antennas Propag., vol. 55, no. 12, pp. 3542–3549, Dec. 2007.
[24] G. Shi and A. Nehorai, “Maximum likelihood estimation of point scatter-ers for computational time-reversal imaging,” Commun. Inf. Syst., vol. 5,no. 2, pp. 227–256, 2005.
[25] T. Isernia, V. Pascazio, and R. Pierri, “On the local minima in a tomo-graphic imaging technique,” IEEE Trans. Geosci. Remote Sens., vol. 39,no. 7, pp. 1596–1607, Jul. 2001.
[26] M. I. Mishchenko, G. Videen, V. A. Babenkoc, N. G. Khlebtsovd, andT. Wriedte, “T-matrix theory of electromagnetic scattering by particlesand its applications: A comprehensive reference database,” J. Quant.Spectrosc. Radiat. Transf., vol. 88, no. 1–3, pp. 357–406, Sep./Oct. 2004.
[27] C. F. Bohren and D. R. Huffman, Absorption and Scattering of Light bySmall Particles. Hoboken, NJ: Wiley, 1995.
[28] Y. Xu, “Electromagnetic scattering by an aggregate of spheres: Far field,”Appl. Opt., vol. 36, no. 36, pp. 9494–9508, Dec. 1997.
[29] Y. Xu, “Efficient evaluation of vector translation coefficients in multipar-ticle light-scattering theories,” J. Comput. Phys., vol. 139, no. 1, pp. 137–165, Jan. 1998.
[30] R. Solimene and R. Pierri, “Imaging thin PEC cylinders via a linear inver-sion scheme and a spatially varying threshold,” in Proc. Europ. Microw.Assoc., vol. 4, no. 1, pp. 11–20.
[31] R. Solimene and R. Pierri, “Detection and localization of a slab by alinearlike δ approach,” J. Opt. Soc. Amer. A, Opt. Image Sci., vol. 24,no. 9, pp. 2661–2672, Sep. 2007.
Raffaele Solimene was born in Italy in 1974. Hereceived the Laurea degree (summa cum laude) andthe Ph.D. degrees in electronic engineering from theSeconda Università degli Studi di Napoli, Aversa,Italy, in 1999 and 2003, respectively.
From 2002 to 2006, he was an Assistant Profes-sor with the Università degli Studi Mediterranea diReggio Calabria, Reggio Calabria, Italy. Since 2006,he has been with the Dipartimento di Ingegneriadell’Informazione, Seconda Università degli Studidi Napoli. His main fields of interest are inverse
scattering problems and resolution power in microwave imaging.
Aniello Buonanno was born in Italy in 1981. Hereceived the Laurea degree (summa cum laude) inelectronic engineering from the Seconda Universitàdegli Studi di Napoli, Aversa, Italy, in 2005. Heis currently working toward the Ph.D. degree inthe Electromagnetic Research Group, Dipartimentodi Ingegneria dell’Informazione, Seconda Universitàdegli Studi di Napoli.
His main fields of interest are inverse scatteringproblems and imaging strong scattering objects.
Rocco Pierri received the Laurea degree (summacum laude) in electronic engineering from theUniversity of Naples “Federico II,” Naples, Italy,in 1976.
He has been with the University of Naples“Federico II” a Visiting Scholar with many univer-sities, such as the University of Illinois, Urbana;Harvard University, Cambridge, MA; NortheasternUniversity, Boston, MA; Supelec, Paris, France; andthe University of Leeds, Leeds, U.K. He has alsolectured extensively abroad at many universities and
research centers. He is currently a Full Professor with the Dipartimento di In-gegneria dell’Informazione, Seconda Università degli Studi di Napoli, Aversa,Italy. His scientific interests include antennas, near-field techniques, phaseretrieval, inverse scattering, subsurface sensing, electromagnetic diagnostics,and tomography.