ICME Refresher Course - Stanford...
30
ICME Refresher Course Lecture 1 Nicole Taheri Institute for Computational and Mathematical Engineering September 19, 2011 Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 1 / 20
Transcript of ICME Refresher Course - Stanford...
ICME Refresher Course
Lecture 1
Nicole Taheri
Institute for Computational and Mathematical Engineering
September 19, 2011
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 1 / 20
scalars, and vectors, and matrices. oh my!
scalar: single quantity or measurement. (lowercase greek)α, β, γ ∈ R.
vector: ordered collection of scalars. (lowercase) x, y, z ∈ Rn.
x =
x1
x2
...xn
all vectors are column vectors, unless otherwise specified.
matrix: two-dimensional collection of scalars. (uppercase) A,B,Σ,Λ.A ∈ Rm×n is a matrix with m rows and n columns
A =
a1 a2 · · · an
=
a11 a12 · · · a1n
a21 a22 · · · a2n
. . .
am1 am2 · · · amn
, AT =
aT1
...aT
m
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 2 / 20
operations on vectors
scalar multiplication: for α ∈ R, x ∈ Rn, αx =
αx1
αx2
...αxn
∈ Rn
vector addition: for x ∈ Rn, y ∈ Rn, z = x + y =
x1 + y1
x2 + y2
...xn + yn
∈ Rn
vector-vector multiplication: for x ∈ Rn, y ∈ Rn,
xT y =[
x1 x2 · · · xn
]
y1
y2
...yn
=
n∑
i=1
xiyi
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 3 / 20
linear functions
Definition
a function f is linear if it satisfies the following two properties:
1 f(αx) = αf(x)
2 f(x + y) = f(x) + f(y)
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 4 / 20
matrix-vector multiplication
let A ∈ Rm×n.we compute the operation of matrix-vector multiplication, as a functionf(x) = Ax, f : Rn → Rm, as
f(x) = Ax =
a11 a12 · · · a1n
a21 a22 · · · a2n
. . .
am1 am2 · · · amn
x1
x2
...xn
matrix-vector multiplication
let A ∈ Rm×n.we compute the operation of matrix-vector multiplication, as a functionf(x) = Ax, f : Rn → Rm, as
f(x) = Ax =
a11 a12 · · · a1n
a21 a22 · · · a2n
. . .
am1 am2 · · · amn
x1
x2
...xn
= x1
a11
a21
...am1
+ x2
a12
a22
...am2
+ · · · + xn
a1n
a2n
...amn
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 5 / 20
matrix multiplication is a linear function
Claim
f(x) = Ax is a linear function
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 6 / 20
matrix multiplication is a linear function
Claim
f(x) = Ax is a linear function
Proof.
1 f(αx) = αf(x)
f(αx) = A(αx) = (αx1)a1 + · · · + (αxn)an
= α(x1a1 + · · · + xnan) = αAx = αf(x).
2 f(x + y) = f(x) + f(y)
f(x + y) = A(x + y)
= (x1 + y1)a1 + · · · + (xn + yn)an
= x1a1 + · · · + xnan + y1a1 + · · · + ynan
= Ax + Ay
= f(x) + f(y).
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 6 / 20
there is a matrix for every linear function
Theorem
for every linear function g : Rn → Rm there is a matrix A ∈ Rm×n such
that g(x) = Ax.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 7 / 20
there is a matrix for every linear function
Theorem
for every linear function g : Rn → Rm there is a matrix A ∈ Rm×n such
that g(x) = Ax.
Proof.
by construction. let the columns of A, a1, . . . , an ∈ Rm, be given byai = g(ei).
∀x ∈ Rn, x =
x1
...xn
= x1e1 + · · · + xnen
∀x ∈ Rn, g(x) = g(x1e1 + · · · + xnen)
= x1g(e1) + · · · + xng(en)
= x1a1 + · · · + xnan = Ax
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 7 / 20
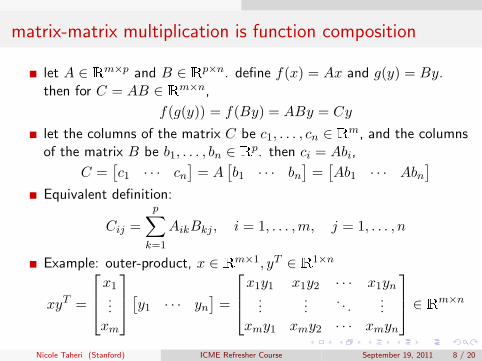
matrix-matrix multiplication is function composition
let A ∈ Rm×p and B ∈ Rp×n. define f(x) = Ax and g(y) = By.then for C = AB ∈ Rm×n,
f(g(y)) = f(By) = ABy = Cy
let the columns of the matrix C be c1, . . . , cn ∈ Rm, and the columnsof the matrix B be b1, . . . , bn ∈ Rp. then ci = Abi,
C =[
c1 · · · cn
]
= A[
b1 · · · bn
]
=[
Ab1 · · · Abn
]
Equivalent definition:
Cij =
p∑
k=1
AikBkj, i = 1, . . . ,m, j = 1, . . . , n
Example: outer-product, x ∈ Rm×1, yT ∈ R1×n
xyT =
x1
...xm
[
y1 · · · yn
]
=
x1y1 x1y2 · · · x1yn
......
. . ....
xmy1 xmy2 · · · xmyn
∈ Rm×n
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 8 / 20
subspaces and linear combinations
Definition
a set S ⊆ Rn is a subspace if the following three properties hold:
1 0 ∈ S
2 x ∈ S =⇒ αx ∈ S, ∀α ∈ R.
3 x, y ∈ S =⇒ (x + y) ∈ S.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 9 / 20
subspaces and linear combinations
Definition
a set S ⊆ Rn is a subspace if the following three properties hold:
1 0 ∈ S
2 x ∈ S =⇒ αx ∈ S, ∀α ∈ R.
3 x, y ∈ S =⇒ (x + y) ∈ S.
Definition
a linear combination of n vectors a1, . . . , an ∈ Rm is a vector in the form
α1a1 + · · · + αnan, α1, . . . , αn ∈ Rthe set of all linear combinations of a1, . . . , an is a subspace. this is calledthe subspace spanned by a1, . . . , an.
Definition
a set of vectors a1, . . . , an ∈ S ⊆ Rm spans S if every x ∈ S can beexpressed as a linear combination of a1, . . . , an.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 9 / 20
linear dependence
Definition
the vectors a1, . . . , an are called linearly dependent if there is a set ofscalars α1, . . . , αn ∈ R not all zero (i.e. ∃αi 6= 0) such that
α1a1 + · · · + αnan = 0.
Definition
a set of vectors a1, . . . , an that are not linearly dependent are calledlinearly independent.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 10 / 20
linear dependence
Definition
the vectors a1, . . . , an are called linearly dependent if there is a set ofscalars α1, . . . , αn ∈ R not all zero (i.e. ∃αi 6= 0) such that
α1a1 + · · · + αnan = 0.
Definition
a set of vectors a1, . . . , an that are not linearly dependent are calledlinearly independent.
question: if a1, . . . , an are linearly independent can we have some ai = 0?
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 10 / 20
linear dependence
Definition
the vectors a1, . . . , an are called linearly dependent if there is a set ofscalars α1, . . . , αn ∈ R not all zero (i.e. ∃αi 6= 0) such that
α1a1 + · · · + αnan = 0.
Definition
a set of vectors a1, . . . , an that are not linearly dependent are calledlinearly independent.
question: if a1, . . . , an are linearly independent can we have some ai = 0?answer: no. why not?
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 10 / 20
linear independence
Lemma
suppose that the vectors x1, . . . , xn span the subspace S ⊆ Rm and the
vectors y1, . . . , yp ∈ S are linearly independent. then p ≤ n.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 11 / 20
linear independence
Lemma
suppose that the vectors x1, . . . , xn span the subspace S ⊆ Rm and the
vectors y1, . . . , yp ∈ S are linearly independent. then p ≤ n.
Proof.
since the x vectors span S, we can write y1 ∈ S as
y1 = α1x1 + · · · + αnxn
since y1 6= 0, not all the α’s are zero (∃αi 6= 0), so we can write
xi =1
αi
y1 +−α1
αi
x1 + · · · +−αn
αi
xn
so the set of x vectors with xi replaced by y1 spans S. repeat this stepn − 1 times to conclude that y1, . . . , yn span the space S. suppose p > n,then yn+1 = α1y1 + · · · + αnyn. this contradicts the linear independenceof the y vectors.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 11 / 20
basis and dimension
Definition
a set of vectors that span S and are linearly independent is called a basis
for S.
Theorem
all bases for a subspace S ⊆ Rm contain the same number of vectors. this
number is called the dimension of S and is denoted dim(S).
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 12 / 20
basis and dimension
Definition
a set of vectors that span S and are linearly independent is called a basis
for S.
Theorem
all bases for a subspace S ⊆ Rm contain the same number of vectors. this
number is called the dimension of S and is denoted dim(S).
Proof.
this follows from the previous lemma and the definition of a basis.suppose we have two bases a1, . . . , an and b1, . . . , bp for S, with p > n.then since a1, . . . , an are a basis for S they must span S, and sinceb1, . . . , bp are linearly independent from the previous lemma we concludep ≤ n. this is a contradiction with p > n. similarly, we can find thatn ≤ p, and hence n = p.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 12 / 20
unique representation in a basis
Theorem
if the vectors a1, . . . , an are a basis for a subspace S, every vector in S can
be uniquely represented as a linear combination of these basis vectors.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 13 / 20
unique representation in a basis
Theorem
if the vectors a1, . . . , an are a basis for a subspace S, every vector in S can
be uniquely represented as a linear combination of these basis vectors.
Proof.
let b ∈ S, and suppose it can be written as two different linearcombinations
b = α1a1 + · · · + αnan = β1a1 + · · · + βnan
rearranging, we have
(α1 − β1)a1 + · · · + (αn − βn)an = 0
since the a’s are linearly independent, the above can only be true ifαi = βi for all i. thus, the coefficients are unique.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 13 / 20
the range of a matrix
Definition
the range of a matrix A ∈ Rm×n, denoted R(A), is the set
R(A) ≡ {Ax : x ∈ Rn}.
let a1, . . . , an ∈ Rm be the columns of A. then, from the definition ofmatrix-vector multiplication
Ax = x1a1 + x2a2 + · · · + xnan
so R(A) is the set of all linear combinations of the columns of A. thus,R(A) is a subspace of Rm. we also call R(A) the column space of A.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 14 / 20
the nullspace of a matrix
Definition
the nullspace of a matrix A ∈ Rm×n, denoted N (A), is the set
N (A) ≡ {x : Ax = 0}.
N (A) is a subspace of Rn.
since Ax = x1a1 + x2a2 + · · · + xnan, we note that
if the columns of A are linearly independent then Ax = 0 =⇒ x = 0.
if the columns of A are linearly dependent then
∃x 6= 0 such that Ax = 0
.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 15 / 20
the rank of a matrix
Definition
the column rank of a matrix A ∈ Rm×n is the dim(R(A)). the row rank
of a matrix A ∈ Rm×n is the dim(R(AT )).
Claim
row rank equals column rank.
Definition
a matrix A ∈ Rm×n is of full rank if rank(A) = min(m,n).
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 16 / 20
one-to-one maps
Theorem
a matrix A ∈ Rm×n with m ≥ n has full rank if and only if it maps no two
distinct vectors to the same vector.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 17 / 20
one-to-one maps
Theorem
a matrix A ∈ Rm×n with m ≥ n has full rank if and only if it maps no two
distinct vectors to the same vector.
Proof.
=⇒ A is full rank means its columns are linearly independent. if thereare vectors x, y where x 6= y such that Ax = Ay, then A(x− y) = 0,or for z = x − y 6= 0, Az = 0. but this means thatz1a1 + z2a2 + · · · + znan = 0, which contradicts the linearindependence of the columns.
⇐= if there do not exist vectors x, y where x 6= y such that Ax = Ay,then there is no vector z = x − y 6= 0 such that Az = 0, orequivalently, there do not exist {z1, z2, . . . , zn} such thatz1a1 + z2a2 + · · · + znan = 0. therefore, the vectors a1, a2, . . . , an
are linearly independent, and rank(A) = n.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 17 / 20
nonsingular matrices
Corollary
if A is full rank with m ≥ n, then Ax = Ay implies x = y. but this is not
true for a matrix that is not full rank.
Definition
a square matrix A ∈ Rn×n not of full rank is said to be singular. a squarematrix A ∈ Rn×n of full rank is said to be nonsingular.
if A is nonsingular, we can uniquely express any vector in Rn as a Ax. inparticular we can express ei = Axi for i = 1, . . . , n.
AX = A[
x1 · · · xn
]
=[
Ax1 · · · Axn
]
=[
e1 · · · en
]
= I
I is the n × n matrix known as the identity.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 18 / 20
matrix inverses
the matrix B such that AB = I is called the matrix inverse of A andis denoted A−1.
any square nonsingular matrix A has a unique inverse A−1 whichsatisfies A−1Ax = x, A−1A = I, AA−1 = I.
if b = Ax then A−1b gives the vector of coefficients in the linearcombination of the columns of A that yields b
b = Ax = x1a1 + · · · + xnan
x = A−1b =
x1
...xn
∃A−1, B−1 then (AB)−1 = B−1A−1
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 19 / 20
linear systems
one of the fundamental problems of linear algebra: Given A ∈ Rm×n
and b ∈ Rm find x ∈ Rn such that
Ax = b
we must have b ∈ R(A) for x to exist. if b ∈ R(A) the system iscompatible. if b /∈ R(A) system is incompatible.
if system is compatible there is a unique solution if and only if thecolumns of A are linearly independent.
if columns of A are linearly dependent there is an infinite number ofsolutions. since ∃z 6= 0 such that Az = 0, if x satisfies Ax = b thenfor any δ ∈ R, A(x + δz) = Ax + δAz = Ax = b.
Nicole Taheri (Stanford) ICME Refresher Course September 19, 2011 20 / 20