
Full Text 01

of 62
description
Quadruped robot control and variable legtransmissions
Transcript of Full Text 01
-
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]o [
]T [Nm]P [W]
Quadruped robot control and variable leg
transmissions
JOHAN INGVAST
Doctoral ThesisStockholm, Sweden 2006
-
TRITA MMK 2006-02ISSN 1400-1179ISRN KTH/MMK/R--06/02--SEISBN 9171782575
KTH, School of Industrial Engineering and ManagementSE-100 44 Stockholm
Sweden
Akademisk avhandling som med tillstnd av Kungl Tekniska hgskolan framlggestill offentlig granskning fr avlggande av teknologie doktorsexamen i maskinkon-struktion fredagen den 10 februari 2006 klockan 10.00 i M2, KTH, Brinellvgen 64,Stockholm.
Johan Ingvast, Januari 2006
Tryck: Universitetsservice US AB
-
Till
Monica
Moa och Jakob
-
Abstract
The research presented in this thesis regards walking of quadruped robots,and particularly the walking of the WARP1 robot. The motivation for therobot is to provide a platform for autonomous walking in rough terrain.
The thesis contains six papers ranging from development tools to actua-tion of robot legs. The first paper describes the methods and tools made forcontrol development. These tools feature: programming of the robot with-out low level coding (C-code); that the controller has to be built only oncefor simulation and experiments; and that names of variables and constantsare unchanged through the chain of software Maple Matlab Simulink Real Time Workshop xPCTarget.
Three controllers, each making the robot walk are presented. The firstcontroller makes the robot walk using the crawl gait. The method usesstatic stability as method for keeping balance and the instantaneous trunkmotions are given by a concept using the so called weight-ratios. A methodfor planning new footholds based on the positions of the existing footholdsis also proposed and the controller experimentally verified.
The second walking controller shows that the robot also can walk dynami-cally using the trot gait. The method proposed uses information from groundcontact sensors on the feet as input to control balance, instead of, which iscommon, inertial sensors. It is experimentally verified that WARP1 can trotfrom level ground onto a slope and turn around while staying balanced.
The main ideas of these two walking controllers are fused in the thirdwhich enables smooth transitions between crawl and trot. The idea of usingthe ground contact sensors from the first controller is here used to estimatethe position of the center of mass. This controller uses weight-ratios in thegait crawl as well as in the dynamic gait trot. Hence, the method of usingweight-ratios is not only useful for static stability for which it was originallyintended. The controller is experimentally verified on WARP1.
The WARP1 robot weighs about 60 kg, has 0.6 m long legs with threeactuated joints on each. The speed and strength is sufficient only for slowwalking, even though the installed power indicates that it should be enoughfor faster walking. The reason is that a walking robot often needs to be strongbut slow when the feet are on the ground and the opposite when in the air.This can not be achieved with the motors and transmissions currently used.
A transmission called the passively variable transmission (PVT) is pro-posed which enhance motor capabilities of robot joints. It is elastic, nonlinearand conservative. Some general properties for elastic transmissions are de-rived such that they can be compared with conventional transmissions. ThePVT gives strong actuation at large loads and fast actuation at small loads.The proposed transmission is compared to a conventional transmission for aspecific task, and the result is that a smaller motor can be used.
v
-
Preface
PhD studies have been a fantastic experience for me, of course lots of hard work,late hours and desperation, but also great friends, parties and enthusiasm. TheCAS research group was pretty large when I joined in 1999. Head of the researchwas Tom, who later went to Canada and now works with banking. Lennart handedin his Licentiate thesis just a few months after I arrived and then left for theindustry. Freyr received his PhD a few years later and went home to Island, wherehe now works with banking. Christian is still in the Stockholm area and sticks tomechatronics, designing satelite equipment. Others have also been involved in theresearch group: PhD students from other departments; technicians Micke, JohanW. and Andreas; master students . . . most of them I dont know where they aretoday. Thanks all, it has been enjoyable to work with you. Well see where I goafter finishing abroad?1
At the moment Im writing this, I have Johan T. in the same room, and Fredrikin the next where also Magnus should be. Thanks for being there. Some occasionsrelated to my years at the department are more memorable than others:
Lunches at Restaurant Cypern. Thanks Payam, Peter and Christian for mak-ing those lunches so special
Johan T. organized a ski weekend in Kittelfjll. We had some days of greatskiing Johan stayed home being ill.
To all the friends that I should have cared about but not had the strength now,Ill be less involved, please accept me as a friend again.
Jan, my supervisor, thanks for letting me follow my own research compass, andfor always taking the time, but most of all thanks for letting me do research onwalking robots.
Christian, we have written a number of papers together. It has been a pleasureto work with you and I hope we will do it again.
Mom and dad, thanks for all the support.My largest appreciation goes to my family: Moa, Jakob and particularly Monica.
Thanks for coping with me during these years.
Stockholm, January 2006Johan Ingvast
Acknowledgment
This work was supported by the Foundation for Strategic Research through theCentre of Autonomous Systems (CAS) at the Royal Institute of Technology.
1No, I could not stand working at a bank.
vii
-
List of published papersChristian Ridderstrm, Johan Ingvast, Freyr Hardarson, Mats Gudmundsson,Mikael Hellgren, Jan Wikander, Tom Wadden, and Henrik Rehbinder. The basicdesign on the quadruped robot Warp1. In Professional Engineering PublishingLimited, editor, 3rd International Conference on Climbing and Walking Robots,pages 87 94, Madrid, Spain, October 2000.
Johan Ingvast, Christian Ridderstrm, Freyr Hardarson, and Jan Wikander. Im-proving a trotting robots gait by adapting foot reference offsets. In ProfessionalEngineering Publishing Limited, editor, 4th International Conference on Climbingand Walking Robots, pages 711718, Karlsruhe, Germany, September 2001.
Christian Ridderstrm and Johan Ingvast. Combining control design tools from modeling to implementation. In Int. Conf. on Robotics and Automation,pages 13271333, 2001.
Christian Ridderstrm and Johan Ingvast. Quadruped posture control based onsimple force distribution a notion and a trial. In IEEE/RSJ Int. Conf. onIntelligent Robots and Systems, pages 23262331, Hawaii, USA, 2001.
Johan Ingvast. Derivation of ground interaction models for plastic soils speciallysuited for walking robots. Technical Report TRITA-MMK 2002:14, Dept. of Ma-chine Design, Brinellv. 83, 100 44 Stockholm, Sweden, June 2002.
Johan Ingvast. A two dimensional bidirectional ground interaction model. InProfessional Engineering Publishing Limited, editor, 5th International Conferenceon Climbing and Walking Robots, pages 547 554, Paris, France, September 2002.
Johan Ingvast and Jan Wikander. A passive load-sensitive revolute transmission.In Professional Engineering Publishing Limited, editor, 5th International Confer-ence on Climbing and Walking Robots, pages 603 610, Paris, France, September2002.
Christian Ridderstrm and Johan Ingvast. Warp1: Towards walking in roughterrain smooth foot placment. In Professional Engineering Publishing Limited,editor, 6th International Conference on Climbing and Walking Robots, pages 467 474, Catania, Italy, September 2003.
Johan Ingvast, Christian Ridderstrm, Freyr Hardarson, and Jan Wikander.Warp1: Towards walking in rough terrain control of walking. In ProfessionalEngineering Publishing Limited, editor, 6th International Conference on Climbingand Walking Robots, pages 197 204, Catania, Italy, September 2003.
Johan Ingvast. PVT The passively variable transmission. Technical ReportTRITA-MMK 2005:17, Dept. of Machine Design, Royal Institute of Technology,S-100 44 Stockholm, Sweden, December 2005.
-
Contents
Introduction 11 The science of walking . . . . . . . . . . . . . . . . . . . . . . . . . 32 The WARP1 robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203 Methods and tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254 Transmissions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265 Summary of papers . . . . . . . . . . . . . . . . . . . . . . . . . . . 386 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A Combining control design tools from modeling to implemen-tation 53A 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54A 2 Development tools and methods . . . . . . . . . . . . . . . . . . . . . 55A 3 Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60A 4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62A 5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B The basic design of the quadruped robot WARP1 69B 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70B 2 Robot hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70B 3 Control design and implementation tools . . . . . . . . . . . . . . . . 73B 4 Control structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75B 5 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76B 6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
C Towards walking in rough terrain Control of walking 81C 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82C 2 Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84C 3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87C 4 Discussion/Future work . . . . . . . . . . . . . . . . . . . . . . . . . 88Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
xi
-
xii CONTENTS
D Improving a trotting robots gait by adapting foot trajectoryoffsets 91D 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92D 2 The robot and control structure . . . . . . . . . . . . . . . . . . . . . 92D 3 Controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93D 4 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97D 5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
E The trunk follows the feet an approach for making a quadru-ped robot walk and trot 103E 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104E 2 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104E 3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114E 4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
F The PVT, an elastic conservative transmission 121F 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122F 2 Theory of conservative elastic transmissions . . . . . . . . . . . . . . 125F 3 The passively variable transmission . . . . . . . . . . . . . . . . . . . 130F 4 The load-sensitive CVT . . . . . . . . . . . . . . . . . . . . . . . . . 136F 5 Torque control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139F 6 Prototype . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140F 7 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141F 8 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
-
Introduction
Mechanical robots have long been a dream of humans. Around the time of thebirth of Christ2 there lived a scientist named Heron of Alexandria, who wrote anumber of books. In one of them, Automata, he described various ways of creatingwonders for temples, including automatically opening doors and dolls that movedby themselves. Reproduction of such an automatically moving doll is illustrated inFigure 1.
One would think that these sophisticated ideas of their time would have beenused for production of some kind, but they were instead used for religious purposes.Today we would call the inventions of Heron toys. The fact that such advancedtechnologies of the past were used for a non-productive purposes is similar to the
2The exact date is unknown: estimates range from a few hundred years before Christ to a fewhundred years after.
Weight
Sand
Wire connected to wheels
Wheels
Sand runsthrough hole
Space for weightwith sand below
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 1: A reproduction of a so-called self-moving stand, invented by Heron ofAlexandria. It was used in various configurations to move objects anddolls on automated theatre stages around the time of the birth of Christ.The pictures come from the website of the Museum of Ancient Inventionsat Smith College, Northampton, Massachusetts.
1
-
2 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 2: AIBO robot dog, a toy from Sony.
situation today. Much high technology can be found in toys and in equipmentfor sports. For example, large quantities of carbon fiber are found in golf clubs,bicycles, and sports cars, and extremely powerful CPUs are advertised for use inthe PS3 game console manufactured by Sony.
Scientists working on walking robots are often asked of what use such walkingmachines are. The answer frequently involves the fact that 50% [33]3 of the earthslandmass cannot be traversed by wheeled vehicles, while animals have proved thatlegs are a practical way to cross such areas. This alone should thus be a goodreason for developing legged robots. However, after more than 50 years of seriousattempts to build agile walking robots, still no robot has proved to be much betterat traversing terrain than wheeled vehicles are.
But still, walking robots are produced in large quantities, not for any productivepurpose but for entertainment. Sony has sold more than 100 000 AIBO robotdogs (see Figure 2). Entertainment is likely to be the largest market for walkingrobots for some time to come.
The research presented in this thesis does not deal with the problem of what arobot is to be used for: the main purpose is rather to build our understanding ofhow quadruped robots can walk and run. The research stem from the need of theCentre for Autonomous Systems (CAS) at the KTH where research on autonomousrobots for indoor and outdoor use is done. The contribution to the CAS activities,from this thesis, regards walking robots for outdoor use, with the aim of blindlocomotion in difficult terrain. Other parts of the center study the methods forvision, localization, mapping, and planning, such that autonomy can be achieved.
3I have not been able to find the original report: the reference comes from [36].
-
1. THE SCIENCE OF WALKING 3
I believe it is important that the controllers of walking robots should be able tofunction without the use of complex, computationally heavy algorithms. Therefore,and partly because of the crude possibilities of the test platform, only simple modelsof the robot were used in deriving the controllers. However, complex models of therobot platform are used for simulation and analysis.
To build useful agile walking robots, not only control is important, they haveto be light-weight, strong, fast and energy efficient. The motors and transmissionsthat actuate the legs affect all these properties, and therefore research in this areais needed.
The thesis encompasses six papers, some already presented at conferences andothers not yet accepted. A summary of those can be found in section 5. Precedingthe papers is an introduction to the issues addressed. Section 1 presents a generaloverview of walking and running, how they can be classified and common controlstrategies for balancing. The next section describes the WARP1 robot which isthe platform used in the included papers dealing with walking. Section 3 brieflydescribes the tools and methods used in the research. The last section provides anintroduction to transmissions, particularly different kinds of variable transmissions.
1 The science of walking
Long before research into walking robots had started, people were already interestedin the motion of animals. At the end of the nineteenth century, there was discussionamong horse specialists as to whether all the feet of trotting horses were in the airat the same instant. The issue was settled by the photographer E. Muybridge,who took photographs showing that trotting horses definitely have all their feetabove the ground at a particular instant. His discovery and the reaction to itmust have encouraged him, because in following years he became known for takingphotographs of animals and humans in motion. He used a series of cameras, eachtaking a single still photo; when the photos were combined, it was possible to seehow the animals moved, something that had never before been possible. His bestknown publication is Animals in motion [15], which includes pictures of all kindsof animals including man in motion. In fact, before the work of Muybridge,very few paintings or sculptures showed realistic poses of horses in action [3]4.
1.1 Gaits
The sequence of the lifting and the placing of the feet and the relative time betweenthese movements is here called gait. In classifying gaits, Muybridges material wasthe best available for a long time, until Milton Hildebrand in the 1960s used film
4I have not been able to find the original article: The claim is made in Hildebrand [6].
-
4 INTRODUCTION
to capture the motion of animals. In the paper Symmetrical gaits of horses [5], heclassified some of the gaits of running and walking horses. The parameters he usedin the classification will, with minor changes, be used here.
We will assume a gait in which the motion is cyclic and within each cycle eachfoot is lifted once. A stride is the interval from lifting a reference foot until liftingit again. The distance the trunk advances during one stride is called the stridelength (represented by the stride vector rS), and the distance a foot advances whenlifted is called the step length. If there is no slip of the foot on the ground, thestep length and the stride length are equal. Each instant in a cycle has a particularphase value, . When lifting the reference foot, the phase is zero and when thestride is completed it is one. The relative phase of a leg is the phase difference fromthat of the reference leg. A foot lifted just after the reference foot is said to have apositive relative phase. A foot is said to be in support if it is on the ground and intransfer if it is in the air.
Gaits can be distinguished as either symmetric or asymmetric: in a symmetricgait the left and right legs differ by half a stride, while in an asymmetric gait thisis not the case. For a thorough analysis of asymmetric gaits see Hildebrand [6].
Which leg to choose as the reference leg is of course arbitrary, and we havechosen to use the front left leg. Thus, for a symmetric gait, the relative phase ofthe front right leg is 0.5. The relative phase of the rear right leg will be denotedby , resulting in the relative phase 0.5 + for the rear left leg.5,6 Thus, for asymmetric gait for which is known, the relative phases of all the legs are known.
The next important factor is the duration of the phase during which the legsare in stance. This is called the duty factor and is denoted by . If all legs areassumed to have the same duty factor, each gait can be described in terms of and . Hence, each symmetrical gait corresponds to a point in a diagram suchas Figure 3. The diagonal and vertical lines in the diagram correspond to gaits inwhich one foot is lifted at the same instant as another foot is placed. The horizontallines correspond to gaits in which two pairs of legs are placed and lifted at the sameinstance. Hence, in all gaits located in the same triangle, the feet are placed andlifted in the same order. Hildebrand refers to gaits with at least two feet in supportat all times as walking gaits and the others as running gaits. The division betweenthese the two kinds of gaits occurs at a duty factor = 1/2.
Triangles 1 and 3 in Figure 3 are of particular interest for this thesis. Figure 4depicts the gaits located in triangle 1, which are called crawl gaits.7 These gaitsallow for great stability and are preferred by animals that move very slowly. Crawl
5Frequently, calculations of phase differences can be larger than one or less than zero. However,the reader should bear in mind that only the fractions of the phase are of importance. Hence, aphase difference of 1.3 has the same meaning as one of 0.3 and a phase difference of 0.2 has thesame meaning as one of 0.8.
6This is nearly the same parametrization as Hildebrand used. He used the rear left leg as thereference leg and denoted the phase difference of symmetrical gaits by the relative phase of thefront left, leg which is the same as 0.5 .
7The crawl gait is sometimes also referred to as the walk gait (it would sound strange to saythat a horse crawls).
-
1. THE SCIENCE OF WALKING 5
Duty factor,
Phase
diff
eren
ce,
} Trot
0.50.250 0.75 1
0
0.5
-0.5
0.25
-0.25
} Pace
} Walkinggaits }Runninggaits
} Pace
1
2
3
4
5
6
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 3: A classification of symmetric gaits.
gaits are also very common among walking robots for the same reason. In theincluded Paper C the crawl is used as the basis of analysis.
A trot occurs when the diagonal legs move nearly as a pair, hence the duty factorlies near the = 0 line (independently of the phase, ). Here, and particularly inthe included Paper E the gaits that fall in triangle 3 of Figure 3 are also regardedas trot. A trot from triangle 3 is depicted in Figure 5 . In this gait there are two-,three-, and four-legged stances.
Some other important areas of the gait diagram (Figure 3) are:
The sequence of lifting and placing the feet in triangle 6 is the reverse of thatin triangle 1 and is thus useful for walking backwards.
In triangle 5, the gait is similar to the trot in triangle 3, with the differencethat the rear foot is lifted before front foot. Such a gait can thus be usefulfor trotting backwards.
Near = 0.5 and = 0.5 is the pace. In such a gait, the legs on each sidemove in unison. This is generally a fast gait and is preferred by long-leggedanimals such as camels and giraffes. This gait allows for a large step lengthwithout interference between the legs.
The most common asymmetric gaits are the gallop, pronk, and bound. The pronkoccurs when all feet move together in a sort of hopping. In the bound, the frontlegs move as a pair, as do the rear legs. Hence, the movements in a bound are more
-
6 INTRODUCTION
1
0 0.5
11.5
0.5
+
1.5
+
1
+
3 3
3
1
4
2
1
4
1
4
2
3
1
4
2
3
1
4
Left front #1
Right front #2
Left rear #3
Right rear #4
1
2
3
1
4
2
3
1
4
2
3
4
2
3
22
1 1 2 2 3 3 14 4
LiftoffTouchdown
TransferSupport
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 4: Depiction of the crawling gait located in triangle 1 of Figure 3. The topline is the time line on which each event of lifting or placing a foot ismarked. The thick horizontal lines in the middle denote the periods ofstance. The bottom figures show the positions of the feet. An open circledenotes a lifted foot and a filled circle a foot placed on the ground. Thegray shaded areas represent the polygon of support. The starting pointof an arrow indicates where the foot is when lifted from ground and itsendpoint where the foot is to land; the arrow length represents the stridevector.
or less two dimensional. The gallop is similar to the bound, only that there is smallphase difference between the two front feet and a small phase difference betweenthe two rear feet. If the phase difference between the front left foot (LF) and rightfront foot (RF) has the same sign as the phase difference for the rear feet (LR andRR) the gait is called a transverse gallop. If the sign is different, the gait is a calledrotary gallop. Typically, the sequence of feet hitting the ground is LFRFLRRRfor a transverse gallop and LFRFRRLR for a rotary gallop. Contrary to bound,the gallop cannot be explained by a two dimensional model.
The duty factor is strongly connected to the speed. One reason for this is thatwith respect to the trunk, each foot has to be moved between two extreme points,one when placing the foot and the other when lifting it. For the support part of thegait the time available is T , where T is the time needed to complete one stride; forthe transfer part, the time available is (1 ) T . Hence, if the duty factor is large,
-
1. THE SCIENCE OF WALKING 7
1
0 0.5
11.5
0.5
+
1.5
+
1
+
3 3
3
1
4
2
1
4
1
4
2
3
1
4
2
3
1
4
Left front #1
Right front #2
Left rear #3
Right rear #4
1
2
3
1
4
2
3
1
4
2
3
4
2
3
22
1 4 2 3 2 3 11 4
LiftoffTouchdown
TransferSupport
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 5: Depiction of a trot gait from triangle 3 of Figure 3. For explanation forhow to read the figure see the Figure 4
a very short time will be available for transferring the foot compared to the timethat the foot is on ground. Therefore, the transfer of the feet is what usually limitsthe speed. When the speed of the foot in transfer limits the speed, a relativelysimple calculation [21] shows that the maximum speed of the trunk relative to theground is limited by
1
vlegmax (1)
where vlegmax is the maximum speed of the foot relative to the trunk in transfer.A result of this relation is that a quadruped using the crawl gait ( = 3/4) cannotmove faster than one third of the highest speed of the leg.
1.2 Strategies for balancing
Different gaits require different balancing strategies. Some gaits, such as the crawlgait for quadrupeds, allow for so-called static balance, while other, presumablyfaster gaits, require dynamic balance. So far, walking has been discussed withoutdistinguishing between the walking of animals and of robots. This section will treatonly the walking of robots.
Generally, the contact between the ground and the foot is not a point. However,
-
8 INTRODUCTION
most quadrupeds have small feet in comparison to the distances between the feet.Therefore, we will assume that the contact between the ground and a foot can bereduced to a point.8 An important concept for walking is the area of support. Thearea of support is the convex hull of the feet in contact with the ground. Whenthe foot contact areas are reduced to points, the edge of the support area outlinesa polygon, so the support area is sometimes referred to as the support polygon.Sometimes only the vertical projection of the contact points is considered, thenthe support area is always well defined. However, if all contact points lie in oneplane the contact area is well defined also for the case when three dimensions areconsidered.
There is a point on the ground where all the vertical forces from the ground tothe robot can be replaced by one force. This point is called the center of pressure,CP and can be calculated as follows:
rCP =1
lL fPlz
lL
rPlfPlz (2)
where L is the set of all feet/legs on the robot, rPl is a vector from some origin tothe foot of leg l, and fPlz is the vertical force acting on the robot at foot l, and it isassumed to always be lifting the robot. The vector rCP points from the origin tothe center of pressure.9 In a vertical projection, the center of pressure does alwaysbelong to the support area.
Note that, normally when defining the center of pressure, only the horizontalcomponents are considered. There are however reasons (see section 1.4), to bringthe vertical component into the definition.
1.2.1 Static balance
Static balance means that the projection of the robots center of mass on the groundis always kept within the area of support and that the robot moves sufficiently slow.Just as a chair with two legs cannot stand by itself, a robot is not statically balancedif fewer than three legs are on ground at a time. Therefore, in order to move thefeet into new positions, a statically balanced robot needs at least four legs.
When a robot walks sufficiently slow, the inertial forces can be ignored. Hence,the vertical force the ground exerts on the robot has to be as large as the weight ofthe robot. Furthermore, the vertical projection of the center of mass, CM, coincideswith the center of pressure.
McGhee [12] defines the static stability margin as the smallest horizontal dis-tance from the center of mass to the border of the support polygon. If the static
8This assumption is common for quadrupeds, however, most bipeds have large feet whichnormally not can be reduced to point contacts.
9Vectors between two points will frequently be denoted in a format like that of rAB, whichdenotes the vector from point A to point B. When rA is written, the implicit meaning is rOA,where O is the origin.
-
1. THE SCIENCE OF WALKING 9
Robot
CM
F = mgl
Ground
Pinpoint foot
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 6: A model of a robot with two (point) feet on the ground
stability margin is positive, then the robot is statically stable. The margin is ameasure of stability.
There are alternative measures of the stability margin such as the energy stabilitymargin [13] and a normalization of it, the normalized energy margin. These twostability margins provide better measures of stability when the the robot is on aninclined terrain, as they indicate how much energy is required to disturb the robotsuch that it falls over an edge of the support area. The static stability margin isindependent of the vertical position of the trunk, whereas the two energy stabilitymargins are not: for these measures the stability decreases with height, which muchbetter reflects the intuitive meaning of static stability.
1.2.2 Dynamic balance
Dynamic balance is a very wide characterization. Dynamically balanced robotsrange from those that move more or less in a statically balanced state, to thosewith aerial phases. In between are most bipeds (two-legged robots), which walkwith at least one foot on the ground at all times (bipeds mostly have large feetwhich provide an area of support), and quadruped robots that trot (having only aline of support).
A special case of the trot treated in the included Paper D, namely, trotting inplace lifting the feet as in trot but with zero stride length, will be analyzed togain an understanding of some of the dynamics of trotting. In this gait, the robothas either four or two legs on the ground. When two legs are lifted, they are liftedstraight up and no special measures are taken to maintain balance, so the robotwill start to fall. Hence, the robot can be modeled as an inverted pendulum, asdepicted in Figure 6.
Assuming a linear system ( small), the equation of motion is
(Jrobot + ml
2) = mgl
where the meanings of l and are as shown in the figure. The total mass of therobot is denoted m and the gravity g. The inertia of the trunk, Jrobot , is often
-
10 INTRODUCTION
much smaller than ml2 and is neglected. The solution to this system is
(t) = 0et (3)
where =
g/l and 0 is angle (t) at the moment the feet leave the ground.Equation (3) shows that angle increases exponentially with time. Therefore, sothat the robot does not fall too far when the legs are lifted, the initial angle, 0,should be as small as possible. The balance controllers presented in Papers D andE try to minimize this angle. As previously noted, the energy margin for staticallybalanced robots decreases when the vertical position of the center of mass increases.For dynamically balanced robots, it is tempting to say that the opposite holds, sincethe dynamics becomes slower (i.e., is smaller) when the vertical position of thecenter of mass increases,10 as equation (3) indicates.
A frequently used concept in dynamic balancing is so-called zero moment point(ZMP) first introduced by M. Vukobratovic and D. Juridic in 1968 [35].11 Therehas been much misunderstanding of the ZMP concept, but I feel that the conceptis sufficiently clarified in Vukobratovic and Borovac [34]. This confusion has arisenbecause the ZMP is 1) sometimes used in planning robotic movements and 2) isclosely related to the center of pressure.
According to Vukobratovic [34] for a foot to be stable on the ground, the centerof pressure must be within the support area. If the center of pressure lies withinthe support area, it is called the ZMP; when the center of pressure is on the edgeof the support area, no ZMP exists.
Realization of the planned motion of all joints of a robot can be tested bychecking whether the ZMP exists at all times. This can be done by taking allgravitational and inertial forces into account, and determining at what point on aplane (the ground) a force must act on the foot so as to accomplish the motion. Ifthis point lies within the support area, the ZMP exists and the motion is stable.Vukobratovic refers to this point which may lie outside of the support area as the fictitious ZMP. The distinction between the ZMP and the fictitious ZMP isoften ignored.
One leg running Most larger mammals have aerial phases when running atthe highest speed, and it is also likely that the fastest gaits of robots will haveaerial phases. A special kind of robot exploit aerial phases to their extreme, suchthat it cannot balance when stationary. Raibert started his analysis with a one-legged hopping robot [18] (see Figure 7), and later extended his original idea tobe applicable in two-legged running and in four-legged trotting [19], bounding, andpacing [18] robots.
Surprisingly, the controller for the one-legged hopping robot is simple. There arethree states: attitude, jumping height, and forward velocity. The last two states are
10Considering the stability of dynamic walking is pointless, however in terms of control theorythe eigenvalue moves to the left in a plot of the poles.
11I have not been able to find the original article; it was cited in [34].
-
1. THE SCIENCE OF WALKING 11
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 7: The one legged hopping robot developed at MIT.
controlled only once in each cycle, and all states are controlled separately. Duringflight (the transfer phase) the center of mass follows a ballistic motion. Hence,none of the states can be controlled. When the foot is on the ground the robotbounces on a springy leg and a hydraulic actuator additionally pushes to controlthe jumping height. The touchdown point of the foot controls the forward velocity.For each speed there is one touchdown point that maintains the speed. This pointis called the neutral point. At zero speed the neutral point is directly under thecenter of mass and at a high speed it is more forward.12 To increase the speed, i.e.accelerate the robot, the touchdown point is made to the rear of the neutral point,and to decrease the speed the reverse is the case. The touchdown point is controlledby positioning the foot (the angle between the leg and trunk) to the appropriatepoint before touchdown. During the support phase, the leg angle is controlled suchthat the trunk attitude is horizontal.
Gallop/four legged running with air-phases Raiberts ideas have been fur-ther developed to improve the one-legged running, for example in Brown and Zeglin[2] and Zeglin and Brown [38], and others have used the ideas to develop the four-legged gallop gait.
The highest running speed of Raiberts quadruped was 2.9 m/s. To make robotsreally useful, they need to move faster, and the fastest gait is supposed to be the
12Interestingly, the neutral point is independent on the height of the jump, which means thatthe dynamics of the forward speed is independent of the ground elevation, and of the groundirregularities.
-
12 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 8: The pronking, bounding and galloping robot Scout II.
gallop. Though many galloping simulations have been performed, to the best ofmy knowledge only one robot has so far succeeded in gallop Scout II developedat McGill University (see Figure 8). Scout II has proven to be a good bounder,and has in that gait run as fast as 1.3 m/s. Using the rotary gallop, Smith andPoulakakis [28] experimentally demonstrated that Scout II can perform a rotarygallop at 1.4 m/s. This is not such a high running speed, but considering thesimplicity of the robot (only one actuator per leg) it is amazing that it can run atall.
Poulakakis et al. have pointed out [17, 16] that the natural dynamics of Scout IImight account for why it works well with such a simple controller. They back thisup by simulations of an unactuated ideal Scout that performs stable running, andas they state [16],
. . . there exists a regime where the model stabilizes itself without theneed of any control action. This might explain why simple controllers, asreported in [32], are adequate in stabilizing a complex dynamic task likequadruped running. Self-stabilization can facilitate the design of controllaws for dynamically stable legged locomotion by designing controllersthat expand the domain of attraction of that behaviour.
1.3 Plan of foot landing position
Where to place the feet is not as trivial a matter as might first seem. For a robotwalking at a constant speed and step length, placing the feet a fixed distance infront of the hip will maintain a specific pattern of the feet on the ground. However,with the same placement strategy, if the robot keeps its main heading constant(the stride length constant), but instantly, the trunk moves sideways or changes its
-
1. THE SCIENCE OF WALKING 13
forward speed, the pattern will be different, and will depend on the instantaneoustrunk movements.
One way of solving this problem is to introduce a virtual vehicle [4] that movesat a constant speed, and then place the feet with respect to this virtual vehicle.For this approach to work, the distance between the virtual vehicle and the actualrobot must not be too large, otherwise the robot will try to place its feet outsideits available reach.
The feet can also be placed with respect to the liftoff point. In this way, thepattern of the feet on the ground is independent of the trunk motion. However,there are a few problems with this method: 1) If the intended foot position is notuseful and another has to be chosen, then this other position will become the newreference point for next placement an the pattern will not return to the desired. 2)If one foot slips when on the ground, the same thing happens, i.e., the referencepoint for the next transfer will move. 3) If the commanded step length is differentfor each foot for some reason, each foot will move in a direction of its own. Thiscan easily cause the desired foot landing position to be out of reach for the robot.
The last problem is cited by Yoneda et al. in [37] to justify another approach.Their robot, TITAN VI, has four legs and in this study the gait examined is a trot,so two legs have to be placed at a time. They introduced two virtual legs, onefor each diagonal pair of legs. The average points of the pair of actual legs is theposition of the virtual leg. They noted that the distance between the virtual legsshould be the same as half the stride length, so in their algorithm they place thenew virtual leg at a distance equal to half the stride length from the other virtuallegs position. In this way they overcame the above three problems.
In the included Paper C a similar algorithm is proposed. The gait examined inthis case is not a trot, so the algorithm Yoneda used could not be applied, but theidea of placing the feet with respect to the actual foot positions is used. The methodis applicable in any gait in which at least one foot is on the ground at all times, andfor a trot the result is exactly the same as with the method Yoneda proposed. Themethod works as follows: Assume a normal pattern of foot positions. The normalpattern corresponds to the foothold pattern when the robot walks in place, andshould be aligned in the same direction as the robot is. Denote each foot positionin this pattern by Pl; let L denote the set of all legs (or feet) and LC the set of alllegs in support. The average point of the feet on the ground is called PC and thecorresponding point for the feet in the normal pattern is PC, hence
rPC =1
|LC |
jLC
rPj and rPC =1
|LC |
jLC
rPj (4)
where |LC | is the size of this set, i.e. the number of feet in support. The methodbuilds on the proposition that for walking in place (rS = 0), the vector between the
average foot on the ground, PC, and the planned landing position of foot l, Pplanl ,
is equal to the difference between PC and Pl, i.e.,
rPCPplan
l = rPCPl (5)
-
14 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
(a) Walking in place
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
(b) Walking with stride
Figure 9: Examples of the evolution of support areas for the crawling gait. Eachframe shows the support patterns after either lifting or placing a foot.
To gain forward velocity, half the stride vector is added to the found position, whichresults in the preferred foot placement point. Rearranging the previous expressionand adding the stride vector results in
rPplan
l = rPCPC + rPl +1
2rS (6)
The normal pattern is preferably fixed in the case of the trunk, and a convenientpattern being the same as that of the hips. Then the planned point of landing (6)can be rewritten as
rHlPplan
l = rHCPC +1
2rS =
1
|LC |
jLC
rHjPj +1
2rS (7)
That is, the foot landing point with reference to the hip should be half the stridevector plus the average of the position of the feet in contact with the ground rel-ative to their respective hips. The algorithm does have some nice features such asindependence of foot lifting order and good convergence. Figure 9(a) shows howthe support polygon converges to the normal pattern when the initial foot posi-tions are in a single point and the desired stride length is zero. Figure 9(b) showsthe same but with a stride vector added; both (a) and (b) depict two full strides.The use of the name stride vector is in this section misleading because it does notexplictly control the trunk motion, however in steady state the real stride vectorwill be equal to rS which therefore should be seen as the desired stride vector.
1.4 Trunk control
We have so far discussed when and where the feet should be placed, as well as,different balancing strategies, but have not actually touched on how exactly therobot should move to accomplish this.
In the case of a static walk, at each point in time there is an area within whichthe robot must remain in order to stay statically stable. However, every time a foot
-
1. THE SCIENCE OF WALKING 15
Foot i
hi
Sm = hii
Area of support
Cdes
M
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 10: Depiction of the relationship between the weight ratio, , and the staticstability margin, Sm.
is lifted, this area is reduced, hence the controller has to guarantee that the robotscenter of mass is above the area remaining.
A crude method to solve this problem is to plan all joint motions beforehand.This implicitly plans the trunk motion, so if the plan takes the center of massposition into account, the robot can be statically stable. A problem with thisapproach is that there has to be one plan for each stride length and every radius ofturning. Therefore, more dynamic planning is preferred.
Hardarson [4] proposed in his thesis that the trunk motion should be plannedby interpolation between the foot positions. For each foot, a cyclic function calledthe weight-ratio, , is planned in advance. It must be continuous and lie in therange [0, 1]. During transfer, the weight-ratio has to be zero and the sum of theweight-ratios for all feet must be one. The weighted average of the actual footpositions is calculated as follows:
rCdesP =
lL
lrPl (8)
where l is the weight-ratio for leg l. The point calculated is used as the horizontalreference position of the trunk. For a slowly moving robot, the vertical projection
of the center of mass is the center of pressure. Therefore, rCdesP is called the desired
center of pressure. Since the weight ratios are continuous in time, the resulting pathof the desired trunk position is also continuous. Furthermore, since the weight-ratiois constrained to the range [0, 1], the reference position will always be on the edgeof or within the support polygon: and when at least three of the weight-ratios arepositive, the reference point will be within the polygon. Note that when a weight-ratio is zero the desired center of pressure is independent of the corresponding footposition.
When three feet are on the ground, there is a close relationship between thestatic stability margin and the weight-ratio. Calculation reveals that the weight-ratio of a foot can be found as the relative distance from the opposite line of thesupport polygon to the projection of the desired center of pressure onto the plane,as Figure 10 depicts. Hence, if the support polygon is an equilateral triangle13 the
-
16 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 11: The adaptive suspension vehicle developed at the Ohio State University.
minimum weight-ratio value is proportional to the static stability margin. Usingthe minimum weight-ratio is therefore an alternative to using the static stabilitymargin. With that in mind, planning the weight-ratios with a sufficient stabilitymargin is simplified.
In the included Paper C the reference for the trunk position is calculated usingthe weight-ratios for a statically stable crawl gait. Further, in the included Paper Eit is also used for dynamic walking.
At a lower level, to control the trunk position and attitude, the feet that are instance must be controlled with respect to the trunk. Assuming that the feet on theground do not slip, there is a one-to-one relationship between the velocities of thetrunk and the velocities of the feet with respect to the trunk. This relationship isused in the included Papers C and E, such that the trunk errors result in desiredvelocities of the trunk that reduce the errors. These desired velocities are thentransformed via a rigid body transformation to corresponding leg velocities, whichare tracked by the leg controllers.
Force distribution Another approach is to let the trunk attitude and positionerrors produce a desired torque and force on the trunk, which in turn decrease theerrors. The desired torque and force then has to be distributed among the feet insome way, a task generally referred to as the force distribution problem. To theforce distribution problem there is usually an infinite number of solutions, often nosolution at all, and only occasionally one distinct solution.14
One method for solving the problem of force distribution is to use some sort ofoptimization. The adaptive suspension vehicle (ASV) seen in Figure 11 presentedby Song and Waldron [29], is a large six-legged walking robot. The ASV uses
13All sides are of equal length.14There is exactly one solution only on the rare occasion when one foot is on the ground and
the desired force happens to generate the desired torque.
-
1. THE SCIENCE OF WALKING 17
force as the control signal for attitude and position. To solve the force distributionproblem an objective function, the square of the forces on the ground, is minimizedusing the pseudo inverse. Naturally, there are other objective functions15 thatcan also be useful. Jiang and Howard, [11], made a comparative study of variousobjective functions that all can all be solved using the pseudo inverse. The functionsminimized were: the square of the forces on the ground, square of torque of thejoints, the square of the power of the motors at the joints, and the square of thequotient of used to available friction. The results from their example indicated thatthe differences between the methods were small in terms of the amount of poweror joint torque used. However, in terms of the fraction of used friction, minimizingthe square of torque performed the worst, producing values approximately fivetimes as large as those obtained by minimizing of the friction which naturallyperformed the best. Minimization problems tend to be computationally heavy, soother distribution methods are preferable.
The weight-ratios introduced for planning the trunk position can also helpwith force distribution, something not suggested in other publications. The torquearound the desired center of pressure that the ground contact exerts on the robotcan be calculated as follows:
lL
rCdesP
Pl fPl =
lL
(
rPl rCdesP
)
fPl =
=
lL
rPl fPl rCdesP
=P
lL lrPl
lL
fPl
=fs
=
=
lL
rPl fPl
lL
rPll fs =
lL
rPl (fPl fsl
)(9)
where fPl is the force acting on the robot on foot l and fs is the sum of all the forces.If fs is taken as the reference force, fdes , for the algorithm governing distributionamong the feet, we see that choosing
fPl = fdesl (10)
results in zero torque around the desired center of pressure.Using this result, we can formulate an algorithm that distributes the desired
force, fdes , and desired torque, TCM
des , on the trunk to desired forces on the feet,
fPldes , as follows:
1. Move the acting point of the force fdes from the center of mass to the desiredcenter of pressure and then find the torque that results in the same torque atthe center of mass as T CMdes , i.e.,
TCPdes = TCM
des + rCM C
desP fdes (11)
15The objective function is the function to be minimized.
-
18 INTRODUCTION
2. Find some forces, fPl
, on the feet that give the correct torque around thedesired center of pressure, i.e. the forces fulfill
lL
rCdesP Pl f
Pl= TCPdes (12)
These forces do not have to fulfil any constraint on the total force.
3. Sum up the forces fPl
from point 2 (12) and subtract those from the referenceforce on the trunk, i.e.,
fdes
lL
fPl
(13)
4. The resulting force from point 3 is applied on equation (10) and the chosenforces from point 2 added, which results in the forces to apply on the feet,i.e.,
fPldes = fPl
+
(
fdes
iL
fPi
)
l (14)
To see that the proposed method actually applies the desired force, we make thesummation
lL
fPldes =
lL
fPl
+
lL
(
fdes
iL
fPi
)
l =
=
lL
fPl
+
(
fdes
iL
fPi
)
lL
l
=1
= fdes (15)
and similarly for the torque
lL
rCM Pl fPldes =
lL
(
rCM Pl fPl)
+
lL
rCM Pl
(
fdes
iL
fPi
)
l =
=
lL
((
rCM CdesP + rC
desP Pl
)
fPl)
+
+
(
lL
lrCM Pl
)
=rCM C
desP
(
fdes
iL
fPi
)
=
-
1. THE SCIENCE OF WALKING 19
= rCM CdesP
lL
fPl
+
lL
(
rCdesP Pl f
Pl)
=TCPdes
+
+rCM CdesP
(
fdes
iL
fPi
)
=
= TCPdes + rCM C
desP fdes = T
CM
des (16)
The algorithm for finding the forces in point 2 is much simplified compared tothe full system, but no solution for it will be proposed here. One problem with thealgorithm is that it does not ensure that the vertical forces exerted on each foot willpoint up, therefore the algorithm for solving point 2 should take the weight-ratiosinto account and prefer forces on feet for which the weight-ratios are large.
If the foot forces resulting from the torque, fPl
, are small relative to lfdes , twothings are noted:
1. The quotient between the horizontal and the vertical forces will be equal foreach foot, meaning that the available friction is used equally on all feet. Thisresembles the minimization of friction utilization, as Jiang and Howard [11]did using the pseudo inverse.
2. As the weight-ratios are continuous, the vertical force for a foot about to belifted will approach zero, arriving at zero at the moment when it is supposedto be lifted. Hence, a foot that is to be lifted does not first have to releasethe vertical force before it leaves the ground.
The algorithm is not restricted to use in robots that are statically stable, or evenin robots that have their center of mass vertically above the center of pressure.However, if the robots center of mass is not located vertically above the center
of pressure or if the robot is moving fast, the fPl
forces are unlikely to be smallrelative to the lfdes forces.
-
20 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 12: The walking robot, WARP1.
2 The WARP1 robotWARP1, seen in Figure 12, is a four-legged walking robot developed at the depart-ment of Machine Design, KTH. It is the platform used to validate the hypothesisregarding walking and comprises the basis of the papers included in this thesis. Adetailed description of it is given in the included Paper B: the rest of this sectionrecapitulates and emphasizes some of the content of this earlier article and discussesfeatures ignored there.
The WARP1 robot is a complex system, its four legs each being equipped withthree joints, motors, sensors, drivers, electronics, computers and communicationbuses. To be able to operate the robot, it has a user interface and tools for devel-oping controllers. Systems that combine mechanics with digitized controllers arecalled mechatronic systems, and WARP1 is a good example of such a system.
Since WARP1 was built, it has been the basis for testing various design ideas,beginning with the trot gait (Paper D) and then later the crawl gait (Paper C)and combinations of the crawl and trot gaits (Paper E). We have also developedcontrollers for more specific hypotheses such as how to control the posture using asimple heuristic force distribution [23].
Hardarson [4] developed and implemented a walking controller using weight-ratios in planning the gait. Contrary to what was done in the included Papers Cand E, the weight-ratios were not planned beforehand, but parameterized and theparameters calculated on-line by minimizing a quadratic goal function with addi-tional constraints. The controller was very successful, but computationally heavy.
The WARP1 robot contains an attitude sensor module. It is equipped with aninclinometer, three rate gyros, and a three-axis accelerometer. The sensor values
-
2. THE WARP1 ROBOT 21
Steel wire
Thigh
Motor
Harmonic drive
Thigh fixed pulley
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 13: The hip flexion extension joint of WARP1. The figure depicts the twostage gearing.
are fused in an algorithm developed by Rehbinder [20]. The attitude values areused in the walking controller devised by Hardarson [4] and also in the controllerspresented in the included Papers E and C.
2.1 The legs and joints
Each leg has three joints, each controlled by a motor. The first joint, starting fromthe robot trunk, moves the legs sideways and is called the abduction/adduction joint(a/a, a term borrowed from physiology, meaning away from/toward the center ofthe body). The next joint, which axis crosses that of the first at 90, is the hipflexion/extension (f/e) joint. The f/e joint drives the 290 mm long thigh forwardand backward. At the end of the thigh is the knee which, contains a f/e joint.This joint drives the shank (300 mm), at the which end there is a small sphericallyshaped rubber foot.
The motors angular velocity is reduced in two stages before it is applied to thejoint. The first stage uses Harmonic Drive gearing with a 100to1 reduction,and the next stage is a wire reduction, as shown in Figure 13. All drive lines frommotor to the leg sections are similar, differing only in terms of the reduction ratioof the wire reduction, which for the hip a/a joint is 2.50:1 and for the two f/e jointsis 2.85:1.
The use of two-stage transmission makes the robot robust. The Harmonic Driveis the main torque amplifier, which is protected from shocks by the wire transmis-
-
22 INTRODUCTION
sion, since the wire is somewhat compliant. The wire also protects the HarmonicDrive from overload, since at excessive torques the wire breaks.
2.2 Control
The control of the robot is a cascaded controller of several layers. In the outer loopis the trunk controller, which establishes the positions/velocities/forces for the feetto follow. These references are treated by the leg controller, which in turn givestorque references to the joint controllers.
Most developed walking controllers of WARP1 use, at some level, force control ofthe feet. However, the force control is not very accurate, and the force can only beapproximately determined. This inaccuracy stems from the use of non-ideal drivelines and the fact that the controller does not take gravity or inertia into account.The following discussion shows how the force control works.
From force to torque The controller is of a feed-forward type. The referenceforce is mapped to torques at the joints by multiplication with a matrix, calleda Jacobian, J . The foot position with respect to the hip is denoted rHPl (q) =
[rx, ry, rz]T
, which is a function of the joint angles q = [q1, q2, q3]T
. The velocity ofthe foot can be expressed in terms of the angular velocities, q, as follows
vHPl =drHPl
dt=
rHPl
q
dq
dt=
rxq1
rxq2
rxq3
ryq1
ryq2
ryq3
rzq1
rzq2
rzq3
q1
q2
q3
= Jq (17)
Assume mass-less legs and no power losses, in which case the power put into the legthrough the actuators has to come out at the foot (since this is the only interactionpoint with the environment). Hence, we can write
Pout = Pin f vHPl = T q
where f = [fx, fy, fz] is the force acting on the foot and T = [T1, T2, T3] is thetorque acting on the joints. Now, the velocity at the l.h.s. can be replaced by theexpression of velocity from (17), as follows:
f Jq = Tq (f J T ) q = 0
This statement has to be valid for any combination of angular velocities, hence16
T = f J (18)
This is the map from the reference force, f des , to reference torque of the jointsT des . The inertia of the links is not accounted for, nor are the effects of gravity.
16The torque and forces are often written as column matrices, in which case the relationshipthen takes the form T = JTf .
-
2. THE WARP1 ROBOT 23
Torque control The actuators used are DC motors with permanent magnets. Itis assumed that the torque is linearly dependent on the coil current, as follows17
Tm = Ikemf (19)
where Tm is the motor torque, kemf the motor constant and I the electrical currentof the coil. The voltage connected to the motor is balanced by the resistive voltageand the back electromotive force (back EMF) as described by the following equation
Um = jointkemf + RI (20)
where Um is the voltage over the motor connections and R the total electricalresistance. Hence, inductance, nonlinearities, and any other possible states areignored.18 To control the torque, a corresponding reference current is calculatedfrom the reference torque using equation (19). The current is then tracked usinga feed-forward part based on equation (20), and a PI control as follows (with s asthe Laplace operator):
Uc = kemf joint + RIref + (Iref Isensed )
(
KP +KIs
)
(21)
where KP and KI are proportional and integral gains of the controller, and Uc is thevoltage command sent to the motor driver. The reference current, Iref = Tdes/kemf ,is limited to 5 A, which corresponds to Tdes = 90 Nm at an f/e joint.
2.3 A note on force and leg control
The control of the force exerted on the feet depends on a number of parametersthat are more or less accurately known; this control does not, however, compensatefor inertia, gravity, or friction. Yet, it is still possible to use it for control of thetrunk, using position (Paper D), velocity (Papers C) and force [23] as referencefor the leg controllers. This works because of robust design at a higher level, andpossibly because the tasks studied do not require high precision.
As the included Paper B points out, because the software limits the electricalcurrents, it takes approximately 90 ms for the joints to reach maximum speed.This is a major limiting factor for both the walking speed and cycle time. If it isassumed that the hip f/e is the limiting joint and the hip f/e changes 1 rad duringsupport phase and the same angle during transfer phase, the shortest time in theair can be calculated. The acceleration of the foot to its highest speed takes 90 msand uses 0.1 rad (the same as is needed to decelerate it). Transferring the last 0.8 rad takes approximately 300 ms. Altogether the whole process takes 480 ms,
17It is assumed that the transmission is ideal, such that the gear ratio can be included in themotor constant, which is scaled with the transmission ratio.
18Such as the resistance dependence of temperature and commutation effects.
-
24 INTRODUCTION
which underestimates the time needed to transfer the foot, as before the foot canbe transferred it first has to be lifted. The lowest duty factor that can be used inthe crawling gait is 0.75, which means the foot is in the air three times as long asit is on the ground. Hence, the time on the ground is approximately 1.5 s, andassuming that the distance from hip to foot is approximately 0.5 m, the speed ofthe robot is 0.3 m/s an upper estimate of the speed of WARP1 in the crawlinggait.
At certain instances, the current limit is likely to be overprotective (the limitwas introduced to protect the mechanics, a task it has done well). However, whenaccelerating the joint, most of the torque of the motor goes to accelerating therotor, not to the links of the legs. Hence, much of the torque generated does notaffect the mechanics. It should thus be possible to introduce a limit that insteaddepends on the states and torque commands in a way, that increases the accelerationpossibilities and still protects the mechanics.
-
3. METHODS AND TOOLS 25
Walk using support ratiosPrerequisete: >>setpath; initpar;
See Doc. & helpfor documentation.
$Revision: 1.2 $ $Date: 2005/11/28 15:38:07 $
1log
Warp1(simulated)
UserInterface
TrunkObserver
TrunkControl
TopviewanimationScopesSettings
Output& bussesLCN:s
Init&update Load & Run
Doc. &help
0
PSfr
agre
pla
cem
ents
o
[]
i
i
[]
To
koo
kio nv
To kc
ko
Tim
e[s
]
[rad
/s]
i
[rad
/s]
o
[rad
/s]
To
[Nm
]
[rad
]
[]
Ts
[Nm
]
o[
]T
[Nm
]P
[W]
Figure 14: The top level of the controller built in Simulink. The Warp1 subsystemholds the interface with the robot and is the only subsystem that hasto be changed (a process that is automated) in order to switch betweensimulation and experiments.
3 Methods and tools
The included Paper A describes the process used in developing and implementingdesign ideas for the robot. The process involves several steps: creation of sym-bolic expressions of the robots properties19 exporting the expressions into SimulinkS-functions, and finally the simulation, visualization, and analysis of the results.This process is of course iterative and is followed by building and uploading thecontrollers to the robot computers, performing the experiments, downloading theexperimental data, and analyzing the results. The main strengths of the processare the possibility of using symbolic manipulation to develop expressions and con-trollers, and the possibility of using exactly the same controller files for both ex-periments and simulations. Figure 14 shows a top view of the simulink model inthe simulation environment.
These and similar tools and methods developed for WARP1 were also used whenworking with the transmissions described in the next section.
19The expressions include the position of a single point of the robot, the center of mass of thetrunk or the whole robot, a Jacobian, or simply the position of the foot with respect to the hip.
-
26 INTRODUCTION
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 15: A clutch transmission developed at Tokai University
4 Transmissions
Actuators comprise a motor and a transmission, and designing them for robots isa delicate matter. The results should ideally be both strong and fast, but sincespeed and strength are in opposition to each other one characteristic has to begiven priority. Choosing a transmission with a low transmission ratio gives anactuator that is fast but weak. On the other hand, a high transmission ratio givesan actuator that is strong but slow. Making the trade-off between these extremesis usually not easy, since robots in general, and walking robots in particular, oftenoperate in two different operation modes: fast under low loads or slow under highloads.
Designers have tried to get around this problem by using more complex designs.For example the advanced suspension vehicle (ASV) [36] (Figure 11 fig:kappa-ASV)from Ohio State University successfully used hydrostatic transmissions that workas continuously variable transmissions (CVT). At Tokai University in Japan, TakuTakahama and Katsuhiko Inagaki proposed a robot with one engine driving all legs[30]. The individual joints would be controlled by magnetic clutches, illustratedin Figure 15, and by activating different clutches the direction of motion can bereversed. The same idea could easily be used to switch between transmissions usingdifferent ratios.
To get an idea of the importance of using the right transmission, three kinds oftransmissions will be compared: I) a transmission that can change the transmissionratio infinitely (CVT), II) a transmission with a fixed transmission ratio, and III)the passively variable transmission, (PVT) described in the next section. Thetransmissions are connected to a motor with torque and velocity characteristicsrestricted as illustrated in Figure 16(b). The motor and transmission drive aninertial load by maximizing the output of the motor. The time it takes to transferthe load a total of 45 is calculated for the different inertial loads and the resultsare shown in Figure 16(a). Quite independently of the load, the CVT produces thebest results as it can always output the full power (0.5 W). Case II, the fixed-ratiotransmission is optimized for a load of approximately 20 kgm2 .
-
4. TRANSMISSIONS 27
1
10
5
PVTFixedtransmission
CVT
101 1 10 102
Inertial load [kgm2]103
Tim
e[s
]
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
(a)
Torque
Tmax
max
max
Tmax
Pdesign
Pdesign
Angularvel.
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
(b)
Figure 16: A comparison between different kinds of transmissions. I CVT, II Fixed transmission and III - the passively variable transmission (PVT).
The PVT used (transmission type III) is tuned to have roughly the same transfertime at a large inertia as the fixed-ratio transmission does. Around the inertia forwhich the fixed transmission is optimized the PVT is slightly slower than the fixedtransmission is; however, at a lower inertia the speed will be higher. It seem asif the PVT could be a useful replacement for fixed transmissions in situations inwhich the load varies.
Normally when designing transmissions it is desirable to keep the stiffness high.The reason for this is that it simplifies position control. As a rule of thumb the firsteigenfrequency of the system
k/m should be of an order higher than the highestfrequency of the expected resulting motion. However, a torque controller can besimplified if the transmission is not so stiff (elastic). In particular the impedance ofthe controller will be equal to the transmission stiffness for high frequencies, hencelow stiffness can be preferred. Furthermore, low stiffness decouples the inertia ofthe motor from that of the actuated shaft. This results in that a robot equippedwith a transmission with low stiffness will appear less heavy to the surrounding andcan thus be more human friendly.
The included Paper F deals with nonlinear elastic transmissions in general andthe PVT in particular. A short description of the PVT follows in the next section.
-
28 INTRODUCTION
d
To
Ri
Ti
Ti
o
i
i
(b)(a)
(c) (d)
Lever
Pulley
d
To
o
Ri
Wire
d
d
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 17: Illustration of the principle of the PVT.
4.1 The passively variable transmission
The passively variable transmission (PVT) is elastic and nonlinear. It is elastic inthe sense that the input and output shafts are not rigidly connected to each other.It is nonlinear in many senses: for example the elasticity is not linear, and a fixedvelocity on the input shaft does not result in a fixed velocity on the output shaft.
The PVT has properties such as a high amplification of torque when the loadis high and that it reduces velocity little when the load is light. The main principleis that depicted in Figure 17. A pulley of radius Ri acts as an input shaft with thetorque Ti and the angular velocity i. Similarly, a lever acts as the output shaftwith the output variables To and o. The pulley and the lever are connected with awire, such that when the pulley turns, the wire pulls on the lever. The orthogonaldistance between the wire and the lever pivot point is d. The relationship betweenthe output and input torque is equal to the relationship between d and Ri, asfollows:
ToTi
=d
Ri(22)
Hence, if the wire is connected to the lever at a point far from the lever pivotpoint, the torque magnification is large as depicted in Figure 17(a) and if it isconnected to the lever at a point near the pivot point, as in Figure 17(c) the torquemagnification is small. For the kind of mechanism depicted in Figure 17(a) and (c)
-
4. TRANSMISSIONS 29
o
i
Spring
Lever
Lever pivot point
Roller
Input/Motor pulleyWire
Spring pulley
To
Ti
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 18: The PVT.
the relationship between the input and output angular velocities is the inverse ofthe relationship for the torque, hence we can write
io
=d
Ri(23)
As pointed out before, for a motor with limited angular velocity and torque,the transmission ratio should be large when the load is high and small when theload is low. If the orthogonal distance, d, by some means could become large whenthe load is high and small when the load is low, then this would be accomplished.One way to accomplish this would be to connect a spring between the lever pivotpoint and the wire, as depicted in Figure 17(b) and (d). At high loads the tensionin the wire is large and the spring is displaced such that the distance between thewire and the pivot point is large. On the other hand, when the load is small thewire tension is also small, so its ability to displace the spring is small. Therefore,the distance between the wire and the pivot point is short.
The PVT is built on this principle but uses two levers so as to be able to transmittorque in both directions, as depicted in Figure 18.
-
30 INTRODUCTION
LoadTransmission
Ti
To
To
i o
PiPo
Motor
Ti
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 19: A transmission consisting of input and output shafts together with amotor and a load. The diagram explains the sign conventions used forthe power, torque, and angular velocities. The important property is thedirection of the power, which is defined as going into the transmission,and that the power is defined as Pi = Tii and Po = Too.
4.2 Transmission basics
Transmission refers to the transfer of mechanical power from one point to another.Sometimes the meaning emphasizes the spatial distance as in the drive-shaft of acar. Here the emphasis is on the quality of the power transferred, not the distance.The angular velocity (occasionally also the translational velocity) and the torque(force) are the qualities of interest.
The transmission transfers power from one shaft to another as depicted in Fig-ure 19. One shaft is called the input shaft and the other the output shaft. Thesign convention of the power used here is that positive power indicates flow intothe transmission.
Definition 1 A transmission for which the sum of the power flowing into it is zerois called an ideal transmission.
The requirement can also be written as Pi = Po. The mechanical power flowinginto the transmission through one of the shafts is the product of two quantities:angular velocity and torque, as follows:
Pi = Tii and Po = Too (24)
For some types of transmissions the velocity ratio, i.e., the ratio between the inputangular velocity and the output angular velocity, is well defined,20 as follows:
nv =io
(25)
Transmissions consisting of gears (with teeth) usually have this property, and fur-thermore, the ratio for most such transmissions is fixed.
Definition 2 A transmission with a constant velocity ratio is called a fixed-ratiotransmission.
20Some authors choose to define the ratio inversely.
-
4. TRANSMISSIONS 31
One can also think of transmissions that similarly have the torque ratio welldefined, as follows:
nt = ToTi
(26)
The sum of the input and output power for an ideal transmission, Pi + Po = 0,can also be written as iTi = oTo. This can be rearranged to give nv = nt. Thusthe velocity and torque ratios are the same in all ideal transmissions; when this isthe case, the ratio is simply called the transmission ratio.
In most cases, the torque coming directly from a motor is insufficient for theapplication, so, the transmission ratio is commonly larger than one, meaning thatthe input shaft moves faster than the output shaft and that the output torque islarger than the input torque. For robotics, transmission ratios of a magnitude of 100or more are common. The transmission ratios in cars are much lower: for example,the manual stick-shift transmission of a BMW 320i has a ratio of nv = 4.32 in itsfirst (lowest) gear and nv = 0.85 in its sixth (highest) gear. Note that for cars, alow gear number means a high transmission ratio, and vice versa.
4.2.1 The CVT
Most transmissions comprise a train of toothed gears. Each single connection be-tween two gears has a fixed transmission ratio, so the gear ratio can really notchange for a given set of gears in action. For cars with stick-shift transmissions,the set of gears active in the transmission is changed in order to change gear ratio.Hence, such a transmission does not have a continuum of gear ratios; there are,however, other ways of building transmissions that do.
The continuously variable transmission (CVT) has the ability to change itstransmission ratio continuously. The design of CVTs can thus not solely dependon gears, and some other way of transferring the power has to be used. Two of themost common methods are friction and fluids (preferably hydraulic oil). Examplesof the former are belt transmissions and the latter are hydrostatic transmissions.The following sections describe both an old a newer type of friction CVT.
Belt CVT Since the 1950s some cars have been equipped with CVTs. The firstcar manufacturer to use the CVT was the Dutch company DAF, which used abelt design, called variomatic. Figure 20 shows the principal components of thistransmission: the input and output shafts have pulleys that are connected witha belt, each pulley comprises two conical halves whose axial position on the shaftcan vary. By increasing the distances between the halves of a pulley, the effectiveradius of the pulley decreases; the reverse happens when the halves are broughttogether. The distance between the pulley halves on the input and output shaftsare changed such that the belt tension is always maintained. Since ideally thevelocity and torque ratio is the ratio of the radii of the pulleys, they are equal andcan be changed. However, they are equal only if there is no energy losses. In reality,
-
32 INTRODUCTION
Input shaft
Belt
Output shaft
High ratio Low ratio
Cones
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 20: Schematic of a belt CVT.
the belt slips such that the velocity ratio is not well defined (for a fixed distancebetween the conical pulley halves). Torque is also lost in the interaction betweenthe belt and the cones, therefore the torque ratio is not well defined either.
Though car manufacturer DAF does not exist any more, other manufacturershave picked up the idea of using belt CVTs. Audi has a transmission called themultitronic transmission that builds on the same principle as the DAF transmis-sion. However, Audi has managed to use a steel chain instead of a belt, which makesthe transmission much more durable than any of the DAF variomatic designs.
Sphere CVT In the so called sphere CVT, designed and built by Moore [14], asphere is constrained in a fixed position by four rollers, as shown in Figure 21. Thecontact between the sphere and a roller can be regarded as like a bicycle wheel, inthat it allows forward but not lateral motion. Like a bicycle wheel, the roller canturn on a single spot.
Two of the rollers have fixed orientation and they act as the input, i, andoutput, o, shafts. The other two rollers which can change orientation, , determinethe direction in which the sphere can rotate.
To understand the principle, a similar transmission is depicted in Figure 22,in which six rollers are used to hold the sphere in place. First consider the casein which the angle of the steering roller, , is zero. Then the input shaft can runfreely together with the sphere, and the output shaft is locked from rotating. Ina sense this can be regarded as an infinite transmission ratio. The other extremeis when the steering roller angle is 90. Then the opposite holds: the output shaft
-
4. TRANSMISSIONS 33
1
22
1
Side view Top view
Sphere
Steeringroller
Driveroller
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 21: The design of a sphere CVT. The illustrations are taken from Moore[14].
i
o
Input shaft
Output shaft
Sphere
Steering roller
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 22: The principle of the sphere CVT. There is another, hidden steering rolleron the back side of the sphere, the central axis of which has the samedirection as the one seen in the middle of the figure.
will be free to rotate while the input shaft is fixed, in a sense resulting in a zerotransmission ratio. For the 45 case, the angular velocities of the input and outputshafts will be the same. A kinematic study reveals that the transmission ratio canbe calculated as
n =io
= 1/ tan (27)
Moores experiments indicated that the practical lower limit of the transmissionratio for such a transmission is approximately n = 0.35 while the upper limit isn = 2.8.
The simplicity of the principle at first glance make the sphere CVT appearattractive. However, there are a number of problems with the design, energy lossesbeing one and wear of the rollers and sphere likely being another.
-
34 INTRODUCTION
Extreme positionSlow Fast Very fast
i
o
i
o
Slider
Output link
Crank(Input link)
Piv
otp
oints
Motor
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 23: Schematic of the dual SMART drive.
4.3 Nonlinear transmissions
Apart from a CVT, in which it is possible to choose any transmission ratio, othertransmissions have transmission ratios that are not directly controllable, but ratherchange as a consequence of the state. In some situations such transmissions canhave the same characteristics as those of a controlled variable transmission.
In robotics, a task frequently performed is moving an arm between two positionswhere the starting and final velocities are zero. For such a highly specialized taska transmission like the dual smart drive can be of use.
The dual SMART21 drive This transmission designed by Akinfiev et al. [1], isintended for walking robots in which each cycle is much like another. The principleis depicted in Figure 23. The input shaft drives a crank arm at the end of whichis a linear bearing sliding on a link, which serves as the output shaft. Turning thecrank moves the output link to different positions. The transmission ratio can bereferred to as variable for two reasons:
1. At different positions of the crank arm, a small crank displacement will causedifferent displacements of the leg. The transmission ratio will be very highnear the leg extreme positions and smaller in the middle. This is a goodproperty when the transmission is used to drive a leg that starts and stopsclose to its extreme positions: it uses the effective power of a motor well,using a large transmission ratio when accelerating and a small one whentransferring.
21SMART stands for Special Mechatronic Actuator for Robot joinTs
-
4. TRANSMISSIONS 35
oi
Torsion spring
Fixed link
Outputlink
Input link
TiTo
Flexible joints
PSfrag replacements
o []
ii[]
TokookionvTokcko
Time [s] [rad/s]i [rad/s]o [rad/s]
To [Nm] [rad]
[]Ts [Nm]
o []
T [Nm]P [W]
Figure 24: Schematic of a load-sensitive continuously variable transmission(LSCVT) designed by Takaki and Omata [31] and the principal rela-tionship between the input and output torques.
2. For a given output angle there are two possible crank angles at which thetransmission ratios are different. When the crank is near the output linkpivot point, the transmission ratio is lower than when the crank is in theother direction. In this way the dual SMART drive would be ideal for awalking robot, since high ratios co




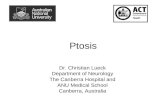


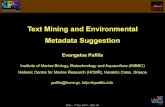





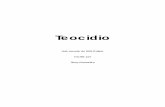


![Lempel-Ziv full-text indexing - · PDF fileLempel-Ziv full-text indexing NicolaPrezza TechnicalUniversityofDenmark DTUCompute Building322,Office006 1. Outline ... [15;13] [12;0] [16;0]](https://static.fdocument.org/doc/165x107/5a78e88b7f8b9a77088ce529/lempel-ziv-full-text-indexing-full-text-indexing-nicolaprezza-technicaluniversityofdenmark.jpg)
