Fluid Mechanics Kundu Cohen 6th edition solutions Sm ch (16)
11
Chapter 16 Page 1 of 11
-
Upload
manoj-c -
Category
Engineering
-
view
596 -
download
225
Transcript of Fluid Mechanics Kundu Cohen 6th edition solutions Sm ch (16)

Chapter 16 Page 1 of 11

Problem 2.
∆p = f(L, a, ρ, µ, ω, U)
∆p, L, a, ρ, µ, ω, U ; n = 7, dimensional parameters.
Primary dimensions: M, L, t; r = 3, primary dimensions. Now,
[∆p] = ML−1t−2, [L] = L, [a] = L, [ρ] = ML−3, [µ] = ML−1t−1, [ω] = t−1, [U ] = Lt−1.
Selecting repeating parameters: a, ρ, U , m = r = 3 repeating parameters.
Then, n−m = 4 dimensionless groups will result.
Setting up the dimensional equations, we have:
Π1 ≡ aC1ρC2UC3LC4
≡ LC1(ML−3)C2(Lt−1)C3LC4
Therefore,
L : C1 − 3C2 + C3 + C4 = 0
M : C2 = 0
t : −3C3 = 0
Therefore, C2 = 0 = C3 and C1 = −C4. Thus,
Π1 ≡(
L
a
)C4
. (1)
Next,
Π2 ≡ aC5ρC6UC7µC8
≡ LC5(ML−3)C6(Lt−1)C7(ML−1t−1
)C8
Therefore,
L : C5 − 3C6 + C7 − C8 = 0
M : C6 + C8 = 0
t : −C7 − C8 = 0
Therefore, C6 = −C8, C7 = −C8, and C5 = −C8. Thus,
Π2 ≡(
µ
aρU
)C8
. (2)
2
Chapter 16 Page 2 of 11

Next,
Π3 ≡ aC9ρC10UC11ωC8
≡ LC9(ML−3)C10(Lt−1)C11(t−1
)C12
Therefore,
L : C9 − 3C10 + C11 = 0
M : C10 = 0
t : −C11 − C12 = 0
Therefore, C10 = 0, C11 = −C12, and C9 = −C12. Thus,
Π3 ≡(aω
U
)C9
. (3)
Next,
Π4 ≡ aC13ρC14UC15∆p1
≡ LC13(ML−3)C14(Lt−1)C15(ML−1t−2
)1
Therefore,
L : C13 − 3C14 + C15 − 1 = 0
M : C14 + 1 = 0
t : −C15 − 2 = 0
Therefore, C15 = −2, C14 = −1, and C13 = 0. Thus,
Π4 ≡(
∆p
ρU2
). (4)
From 1-4, we get∆p
ρU2≡ C
(L
a
)C4(
µ
aρU
)C8 (aω
U
)C9
. (5)
where, C, C4, C8, C9 are constants.
Therefore, we may write∆p
ρU2= C1
(L
a
)C2
(Re)C3 (St)C4 . (6)
where, C1, C2, C3, C4 are constants.
3
Chapter 16 Page 3 of 11

Problem 3.
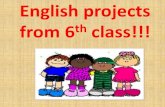
Morgan and Young invoke the following assumptions: (1). A collar-like stenosis may beapproximated by a smooth, rigid, axisymmetric constriction in a long straight tube, (2).The effect of the stenosis geometry is dominant and any influence of wall distensibility isnegligible, (3). Blood can be treated as a Newtonian fluid at the flow rates encounteredin the large arteries where stenosis commonly occur, (4). Blood flow is laminar, and (5).Steady flow assumption is acceptable although the arterial blood flow is pulsatile.The stenosis is shown in the following figure: The dimensional variables are designated by
Figure 1: Axisymmetric stenosis.
. The axial coordinate and velocity are z and u. U is the centerline velocity. The radialcoordinate is r and the corresponding velocity component is v. The dimensionless variablesare: r = r/R0, z = z/R0, R = R/R0, u = u/U0, v = v/U0, U = U/U0, and p = p/ρU0
2,
where, U0 is the average velocity in the unobstructed tube, and p is the pressure and ρ isthe density.The usual continuity, axial momentum, and radial momentum equations for axisymmetricflow in a tube are considered. The dimensionless momentum equations involve the Reynoldsnumber, Re = 2R0U0ρ/µ, where µ is the fluid viscosity. By integrating the axial momentumequation over the cross section of the tube and by invoking the no slip condition, u = v = 0 atthe wall of the vessel, the integral momentum equation is developed. Next, by multiplyingthe axial momentum equation by ru, and integrating over the cross section, the integralenergy equation is developed. It is now noted that in these two equations, the terms due tothe viscous component of the normal stress in the axial direction (∂2u/∂z2) are negligible.Next, an important observation is made in regard to the pressure gradient ∂p/∂z. It isnoted that the pressure gradient ∂p/∂z is independent of the radial coordinate r for flow ina straight tube, whereas for flow in a constricted tube the pressure gradient will, in general,vary over the cross section. However, if the integral energy equation is multiplied by R2 theresulting integral involving the pressure gradient is equal to the corresponding integral inthe integral momentum equation for two special cases: (i) ∂p/∂z is independent of r; (ii) thevelocity u is independent of r. Since these two conditions are approached in a constriction,i.e. in the gradually varying initial portion of the constriction the pressure gradient is nearlyconstant and in the rapidly converging portion the velocity profile tends to become flattened,we may let, ∫ R
0
r∂p
∂zdr ≈ R2
∫ R
0
ru∂p
∂zdr. (1)
4
Chapter 16 Page 4 of 11

This approximation would enable the elimination of the pressure gradient term in both theintegral momentum and integral energy equations. Then it is possible to combine the integralmomentum and energy equations into a single equation in terms of axial velocity:
1
2R2 ∂
∂z
∫ R
0
ru3dr − ∂
∂z
∫ R
0
ru2dr = − 2
Re
[R2
∫ R
0
r
(∂u
∂r
)2
dr + R
(∂u
∂r
)∣∣∣∣R
]. (2)
The equation (2) is subject to (i) u = U at r = 0; (ii) u = 0 at r = R; (iii) ∂u/∂r = 0 atr = 0; (iv) ∂3u/∂r3 = 0 at r = 0; and, (v) the condition that the net flow through any crosssection must be the same for any incompressible fluid which may be expressed by:∫ R
0
r u dr =1
2. (3)
In the above, the condition (iii) is derived from a consideration of the forces on a cylindricalelement having its axis along the tube centerline. If the pressure and the inertial forcesare to be finite as the radius of the element approaches zero, the viscous force, which isproportional to ∂u/∂r, must approach zero. The condition (iv) is developed by eliminatingthe pressure between the axial momentum and radial momentum equations and consideringthe resulting equation as r approaches zero.Next, it is noted that at high Reynolds numbers, the profile must allow a thin region ofhigh shear near the wall in the converging section with a relatively flat profile in the core.To accommodate these requirements, Morgan and Young construct a polynomial fit whichpermits the shear near the wall to become large while maintaining a flat core flow. This fitis given by,
u = U for 0 ≤ r
R≤ λ, and, u = a + b
( r
R
)2
+ c( r
R
)4
for λ ≤ r
R≤ 1, (4)
where a, b, and c are unknown coefficients and λ is the value of (r/R) at the juncture sepa-rating the flat and polynomial parts of the profile. The unknown coefficients are determinedfrom the no slip condition along with two compatibility conditions u = U and ∂u/∂r = 0at (r/R) = λ. The constraint (v) enables expressing λ in terms of R and U . Thus thepolynomial fit profile for u is entirely in terms of U , r, and R. The profile is now introducedinto the equation (2). The resulting first order, non-linear ordinary differential equation isnumerically solved by assuming that Poiseuille flow prevails far upstream of the stenosis.The solution provides the desired velocity profiles. These are plotted by Morgan and Young.The wall shear stress is evaluated from
τw = µ
(∂u
∂r
)∣∣∣∣R
[1 +
(R′
)2]
, (5)
where R′ is the slope dR/dz of the wall. The results are included in the paper by Morganand Young.
5
Chapter 16 Page 5 of 11

Problem 4.
In a pure pressure-gravity flow, the effects of friction are negligible compared with the effectsdue to changes of the external pressure and the elevation in the gravity field. Lengthwise al-terations of speed, pressure, area, etc., are brought about by changes in pe and z. Changes inpe may be brought about by : (i) active muscle tone; (ii) elastic constrictions, or sphincters,as where veins pass from the abdominal cavity to the thoracic cavity, and in the pulmonarysystem; (iii) weights, (iv) pressurizing cuffs, and (v) clamps etc.,. Changes in z are importantbecause (i) in the vertical position of a human being, the hydrostatic pressure exceeds thevenous and arterial pressure levels;(ii) during aircraft maneuvers; and, (iiI) during certainphases of space flight when effective g may be greatly increased.Retaining only the terms in d(pe +ρgz) in the table of influence coefficients for the tube law,
−P ≈ α−n − 1, and, n =3
2, (1)
the governing equations of a pure pressure-gravity flow are written as,(1− S2
) 1
α
dα
dx= −2
3α
32dΠ
dx, (2)
and, (1− S2
) 1
S2
dS2
dx= +
1
3α
32dΠ
dx, (3)
where,
Π =(pe + ρgz)
Kp
. (4)
Dividing equation (3) by equation (2) and integrating, for a pure pressure-gravity flow wehave,
α
α∗ =A
A∗ =( u
u∗
)−1
= S−4, (5)
where, ∗ denotes the value of the quantity at S = 1. For the tube law given by equation (1),the wave speed is known to be,
c =
[nKpα
−n
ρ
] 12
, n =3
2. (6)
From equations(5) and (6),c
c∗=
( α
α∗
)− 34
= S3. (7)
Also, from Bernoulli’s theorem,
(p− p∗)12ρc∗2
= 1− S8 +g (z∗ − z)
c∗2. (8)
With equation (8), and by the elimination of α from equation (3) using equation (5), Shapirodevelops,
1
3α∗ 3
2 dΠ = S4(1− S2)dS2. (9)
6
Chapter 16 Page 6 of 11

Integration of equation (9) between limits Π and Π∗ corresponding to S and 1, gives
1
3α∗ 3
2 (Π− Π∗) =1
3
(S6 − 1
)− 1
4
(S8 − 1
). (10)
Shapiro provides graphs of equation(10). The graphs show that increasing values of Π driveS towards unity and decreasing values of Π drive S away from unity. From these, it isconcluded that: (i) Choking occurs when the value of Π continually increases with eitherS < 1 or S > 1; (ii) Continuous transition through S = 1 may be achieved by means of anincrease in Π until S = 1 is reached, with dΠ/dx becoming zero exactly at S = 1 followedthen by a decrease of Π.
7
Chapter 16 Page 7 of 11

Problem 5.
To determine the volume flux for the flow with the Power-law model, consider an annu-lar volume element of length L and thickness dr in the flow, as shown in the figure below:
r
dra
L
Figure 2: Representative volume element.
Let there be a constant pressure gradient, −∆p/L, across the element of length L.
Force due to pressure gradient on the annular element = +∆p
L(2πrL) dr. (1)
This must be balanced by shear force which is given by,
Shear force = (2πdr) Ld
dr(rτ). (2)
Therefore,
d
dr(rτ) =
∆p
Lr (3)
τ =∆p
L
r
2+
c
2(4)
where c is a constant. The stress is finite at axis r = 0. Therefore c = 0 and hence, from 4,
τ =∆p
L
r
2. (5)
For a power-law fluid,τ = µγn. (6)
Therefore γ =
(∆p
L
r
2µ
) 1n
. (7)
In this problem, since velocity is a function of r only,
γ = −du
dr. (8)
8
Chapter 16 Page 8 of 11

where u(r) is velocity component in r direction.From equations 7 and 8,
du
dr= −
(∆p
L
r
2µ
) 1n
. (9)
The no-slip condition at the wall requires that
u = 0 at r = a. (10)
By integrating equation 9 and using equation 10, one obtains
u =
(∆p
2µL
)1/nn
n + 1
(a
n+1n − r
n+1n
). (11)
Now, the flux for flow, Q, is given by
Q =
∫ R
0
2πrudr. (12)
With integration by parts and invoking the no-slip conditions at r = a,
Q = π
∫ a
0
r2
(−du
dr
)dr. (13)
With equation 11,
Q = π
∫ a
0
r2
(∆p
L
r
2µ
)1/n
dr (14)
=
(∆p
2µL
)1/nnπ
3n + 1a
3n+1n (15)
When n = 1,
Q =
(∆p
2µL
)π
4a4 (16)
=
(πa4
8µ
)∆p
La
3n+1n
which agrees with equations (17.17) and is the Poiseuille formula.
9
Chapter 16 Page 9 of 11

Problem 6.
To determine the volume flux for the flow with Herschel-Bulkley model, we first note that
τ = µγn + τ0 , τ ≥ τ0
and γ = 0 , τ < τ0 (1)
There is yield stress and as a consequence the flow region includes plug flow in the core asshown in figure Let the radius of the plug flow region be rp.
Core region
a
rp
Velocity profile
Figure 3: Representative volume element.
For r ≤ rp, τ(r) = τ0 = constant (2)
Therefore in the core, γ = 0. (3)
Therefore in the core,du
dr= 0. (4)
Therefore,
u = constant (5)
= up (say) (6)
(7)
For a constant pressure gradient, − (∆p/L), across an element of length L in the core ofregion, from a force balance,
2πrpLτ0 =∆p
Lπrp
2L (8)
Thus, rp =2τ0
(∆p/L)(9)
τ0 =∆p
L
rp
2(10)
Outside the core region, with u = u(r), just as in problem 5,
du
dr= −
(∆p
2µL
) 1n
(r − rp)1n . (11)
10
Chapter 16 Page 10 of 11

By integration,
u = −(
∆p
2µL
)1/nn
n + 1(r − rp)
n+1n + C. (12)
where C is a constant of integration.Now, at r = a, u = 0 (no-slip condition). Therefore,
u =
(∆p
2µL
)1/nn
n + 1
((a− rp)
n+1n − (r − rp)
n+1n
). (13)
We can also calculate the plug velocity by setting r = rp in equation 12. Thus,
up =
(∆p
2µL
)1/nn
n + 1(a− rp)
n+1n . (14)
The volume flux may be calculated from,
Q = πrp2up +
∫ a
rp
2πrudr. (15)
With equations 13 and 14, we can evaluate equation 15.
Let ξ = rp/a. (16)
Then, after integration and considerable algebra,
Q =
(∆p
2µL
)1/nnπ
n + 1a
3n+1n
[ξ2(1− ξ)
n+1n + (1 + ξ)(1− ξ)
2n+1n
− 2n
3n + 1(1− ξ)
3n+1n − 2n
2n + 1ξ(1− ξ)
2n+1n
](17)
When τ0 = 0, the Herschel-Bulkley model reduces to the Power-law model. Therefore, withτ0 = 0 and ξ = 0, equation 17 reduces to the result of problem 5.
11
Chapter 16 Page 11 of 11