Facultatea de Inginerie electrica,energetica si informatica aplicata 6.pdf · 2018-02-08 ·...
13
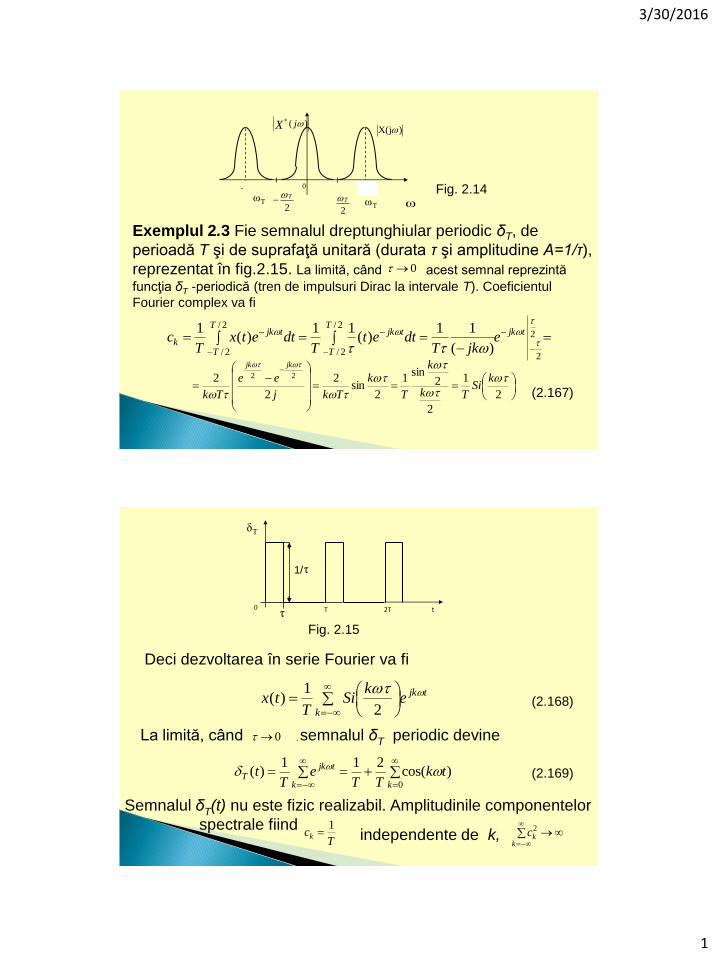
3/30/2016 1 - 0 ) ( j X ) X(j T ω 2 T 2 T T ω ω Fig. 2.14 Exemplul 2.3 Fie semnalul dreptunghiular periodic δ T , de perioadă T şi de suprafaţă unitară (durata τ şi amplitudine A=1/τ), reprezentat în fig.2.15. La limită, când acest semnal reprezintă funcţia δ T -periodică (tren de impulsuri Dirac la intervale T). Coeficientul Fourier complex va fi 0 2 2 2 / 2 / 2 / 2 / ) ( 1 1 ) ( 1 1 ) ( 1 t jk T T t jk T T t jk k e jk T dt e t T dt e t x T c 2 1 2 2 sin 1 2 sin 2 2 2 2 2 k Si T k k T k T k j e e T k jk jk (2.167) 1/ 2T T t 0 T δ Fig. 2.15 τ τ Deci dezvoltarea în serie Fourier va fi k t jk e k Si T t x 2 1 ) ( (2.168) La limită, când 0 , semnalul δ T periodic devine 0 ) cos( 2 1 1 ) ( k k t jk T t k T T e T t (2.169) Semnalul δ T (t) nu este fizic realizabil. Amplitudinile componentelor spectrale fiind T c k 1 independente de k, k k c 2
Transcript of Facultatea de Inginerie electrica,energetica si informatica aplicata 6.pdf · 2018-02-08 ·...
3/30/2016
1
- 0
)( jX
)X(j
Tω2
T2
TTω ω
Fig. 2.14
Exemplul 2.3 Fie semnalul dreptunghiular periodic δT, de
perioadă T şi de suprafaţă unitară (durata τ şi amplitudine A=1/τ),
reprezentat în fig.2.15. La limită, când acest semnal reprezintă
funcţia δT -periodică (tren de impulsuri Dirac la intervale T). Coeficientul
Fourier complex va fi
0
2
2
2/
2/
2/
2/ )(
11)(
11)(
1
tjkT
T
tjkT
T
tjkk e
jkTdtet
Tdtetx
Tc
2
1
2
2sin
1
2sin
2
2
2 22
kSi
Tk
k
T
k
Tkj
ee
Tk
jkjk
(2.167)
1/
2TT t0
Tδ
Fig. 2.15
τ
τ
Deci dezvoltarea în serie Fourier va fi
k
tjkek
SiT
tx
2
1)( (2.168)
La limită, când 0 , semnalul δT periodic devine
0
)cos(211
)(kk
tjkT tk
TTe
Tt
(2.169)
Semnalul δT(t) nu este fizic realizabil. Amplitudinile componentelor
spectrale fiindT
ck
1 independente de k,
kkc2
3/30/2016
2
puterea semnalului este infinită. Funcţia Si(α) este dată de
obicei sub formă tabelată sau grafic.
Exemplul 2.4 Se consideră impulsul Dirac )(t neperiodic, definit
prin
1)(lim)(
0dttdtt (2.170)
Transformata Fourier a acestei funcţii este F{δ(t)}=1, deci
spectrul de amplitudine al impulsului este constant pe
întreaga axă a frecvenţei.
Exemplul 2.5. Se consideră funcţia treaptă unitară (Heaviside)
definită prin
0 t 1
0t 0)(t (2.171)
j
tF1
)( excluzând o vecinătate a originii deoarece )(t
nu este absolut integrabilă. Pentru a determina spectrul în întreg
domeniul frecvenţelor se poate aproxima semnalul treaptă,
conform relaţiei
; )(
)(X ;
2
2sin
2( lar triunghiuImpulsul 2/
2
A
jXje
AjX j
0 ; j
1
0 );(
][lim)]([0
teFtF (2.172)
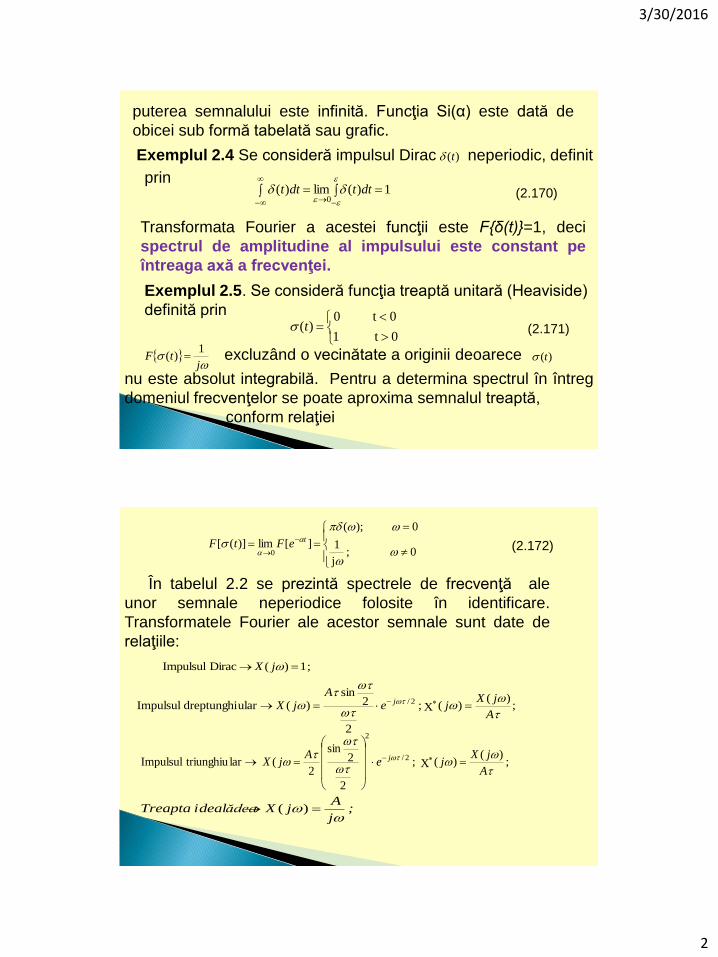
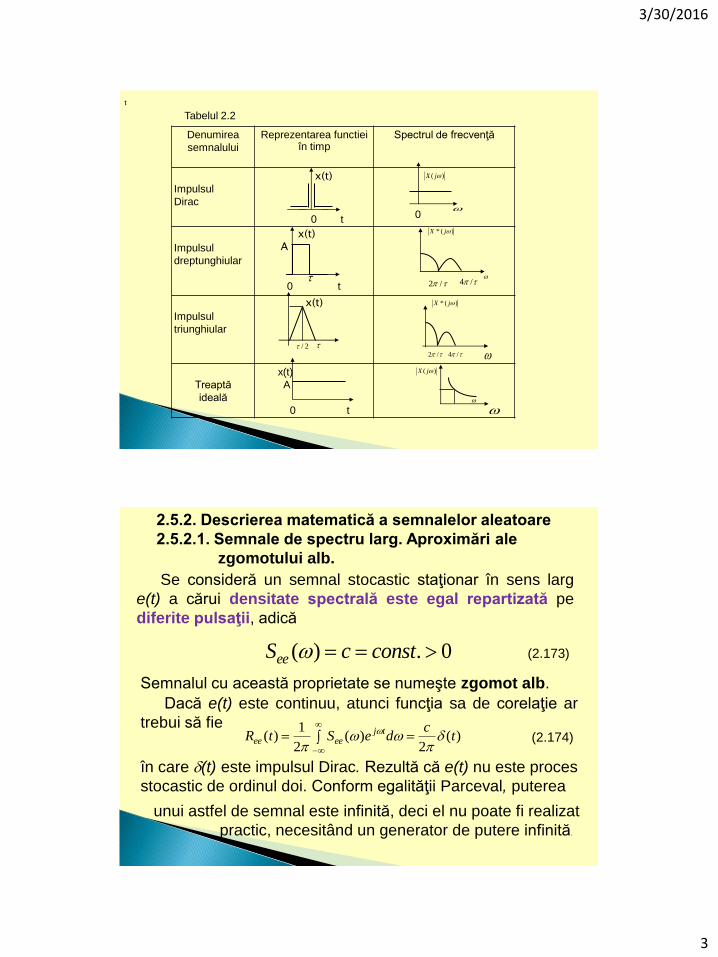
În tabelul 2.2 se prezintă spectrele de frecvenţă ale
unor semnale neperiodice folosite în identificare.
Transformatele Fourier ale acestor semnale sunt date de
relaţiile:
; 1)( DiracImpulsul jX
;)(
)(X ;
2
2sin
)(ular dreptunghi Impulsul 2/
A
jXje
AjX j
; j
AjXidealădeaTreapta
)(
3/30/2016
3
Denumirea
semnalului
Reprezentarea functieiîn timp
Spectrul de frecvenţă
Impulsul
Dirac
x(t)
0 t 0
Impulsul
dreptunghiular
x(t)A
0 t
Impulsul
triunghiular
x(t)
Treaptă
ideală
x(t)
A
0 t
)( jX
)(* jX
/2 /4
2/
)(* jX
/2 /4
)( jX
t
Tabelul 2.2
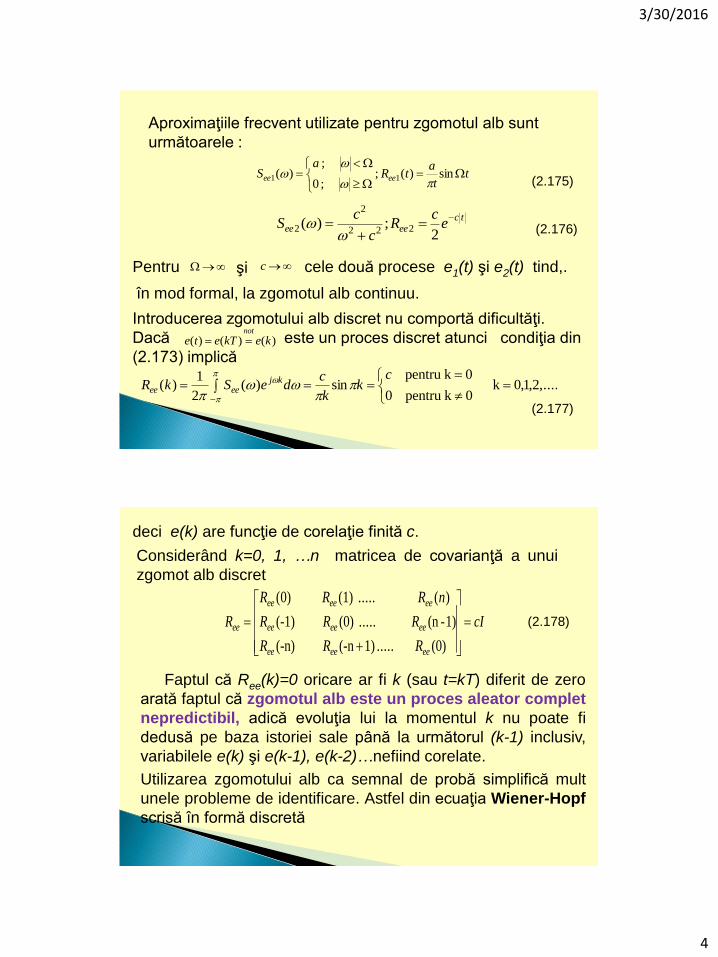
2.5.2. Descrierea matematică a semnalelor aleatoare
2.5.2.1. Semnale de spectru larg. Aproximări ale
zgomotului alb.
Se consideră un semnal stocastic staţionar în sens larg
e(t) a cărui densitate spectrală este egal repartizată pe
diferite pulsaţii, adică
0.)( constcSee (2.173)
Semnalul cu această proprietate se numeşte zgomot alb.
Dacă e(t) este continuu, atunci funcţia sa de corelaţie ar
trebui să fie
)(2
)(2
1)( t
cdeStR tj
eeee
(2.174)
în care (t) este impulsul Dirac. Rezultă că e(t) nu este proces
stocastic de ordinul doi. Conform egalităţii Parceval, puterea
unui astfel de semnal este infinită, deci el nu poate fi realizat
practic, necesitând un generator de putere infinită.
3/30/2016
4
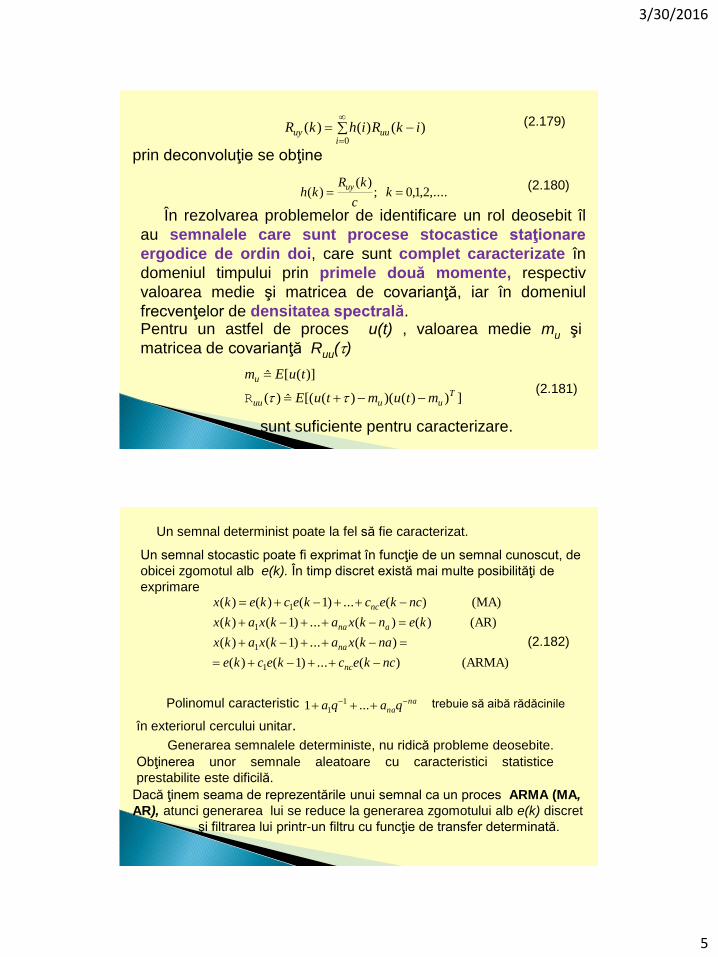
Aproximaţiile frecvent utilizate pentru zgomotul alb sunt
următoarele :
tt
atR
aS eeee
sin)( ;
; 0
; )( 11
tceeee e
cR
c
cS
2;)( 222
2
2
(2.175)
(2.176)
cPentru şi cele două procese e1(t) şi e2(t) tind,.
în mod formal, la zgomotul alb continuu.
Introducerea zgomotului alb discret nu comportă dificultăţi.
Dacă este un proces discret atunci condiţia din
(2.173) implică)()()( kekTete
not
,....2,1,0k 0k pentru 0
0k pentru sin)(
2
1)(
ck
k
cdeSkR kj
eeee
(2.177)
deci e(k) are funcţie de corelaţie finită c.
Considerând k=0, 1, …n matricea de covarianţă a unui
zgomot alb discret
cI
RRR
RRR
nRRR
R
eeeeee
eeeeee
eeeeee
ee
(0) . .... 1)(-n (-n)
1)-(n ..... (0) (-1)
)( . .... (1) )0(
(2.178)
Faptul că Ree(k)=0 oricare ar fi k (sau t=kT) diferit de zero
arată faptul că zgomotul alb este un proces aleator complet
nepredictibil, adică evoluţia lui la momentul k nu poate fi
dedusă pe baza istoriei sale până la următorul (k-1) inclusiv,
variabilele e(k) şi e(k-1), e(k-2)…nefiind corelate.
Utilizarea zgomotului alb ca semnal de probă simplifică mult
unele probleme de identificare. Astfel din ecuaţia Wiener-Hopf
scrisă în formă discretă
3/30/2016
5
0
)()()(i
uuuy ikRihkR (2.179)
prin deconvoluţie se obţine
,....2,1,0 ;)(
)( kc
kRkh
uy (2.180)
În rezolvarea problemelor de identificare un rol deosebit îl
au semnalele care sunt procese stocastice staţionare
ergodice de ordin doi, care sunt complet caracterizate în
domeniul timpului prin primele două momente, respectiv
valoarea medie şi matricea de covarianţă, iar în domeniul
frecvenţelor de densitatea spectrală.Pentru un astfel de proces u(t) , valoarea medie mu şi
matricea de covarianţă Ruu()
]))()()([(ˆ)(
)]([ˆ
Tuuuu
u
mtumtuE
tuEm
R(2.181)
sunt suficiente pentru caracterizare.
Un semnal determinist poate la fel să fie caracterizat.
Un semnal stocastic poate fi exprimat în funcţie de un semnal cunoscut, de
obicei zgomotul alb e(k). În timp discret există mai multe posibilităţi de
exprimare
(ARMA) )(...)1()(
)(...)1()(
(AR) )()(...)1()(
(MA) )(...)1()()(
1
1
1
1
nckeckecke
nakxakxakx
kenkxakxakx
nckeckeckekx
nc
na
ana
nc
(2.182)
Polinomul caracteristic nanaqaqa ...1 1
1
în exteriorul cercului unitar.
Generarea semnalele deterministe, nu ridică probleme deosebite.
Obţinerea unor semnale aleatoare cu caracteristici statistice
prestabilite este dificilă.
trebuie să aibă rădăcinile
Dacă ţinem seama de reprezentările unui semnal ca un proces ARMA (MA,
AR), atunci generarea lui se reduce la generarea zgomotului alb e(k) discret
şi filtrarea lui printr-un filtru cu funcţie de transfer determinată.
3/30/2016
6
În timp continuu generarea zgomotului alb presupune un
generator de putere infinită. Un semnal continuu poate fi
aproximat bine printr-un semnal discret doar când perioada de
eşantionare tinde la zero.
2.5.2.2. Semnale pseudoaleatoare binare (SPAB)
Secvenţele de zgomot alb pot fi generate utilizând
calculatoare (echipamente) numerice. Cea mai simplă
procedură de obţinere a zgomotului alb implică numai
operaţii liniare. O secvenţă bazată pe acest principiu, cu un
algoritm bine precizat este de fapt deterministă şi nu aleatoare
şi de aceea este denumită pseudoaleatoare. Dacă funcţia de
corelaţie aproximează suficient de bine funcţia de corelaţie a
zgomotului alb discret, atunci secvenţa generată poate fi
considerată o realizare a zgomotului alb.
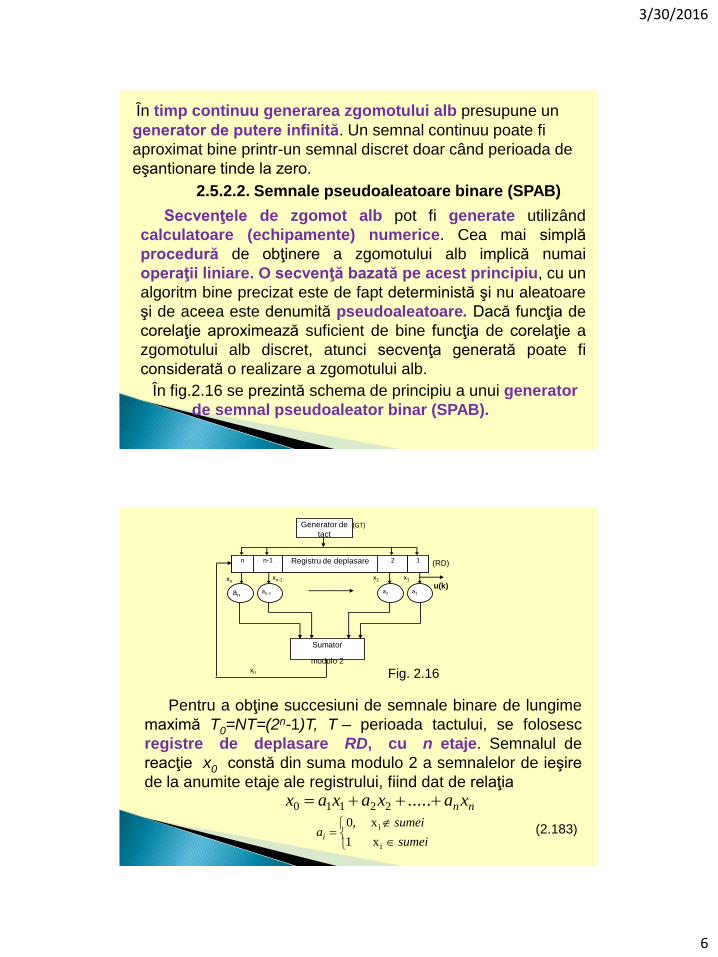
În fig.2.16 se prezintă schema de principiu a unui generator
de semnal pseudoaleator binar (SPAB).
Generator de
tact
n n-1 12Registru de deplasare
anan-1 a1a2
Sumator
modulo 2
(GT)
x0
(RD)
u(k)xn xn-1 x2 x1
Fig. 2.16
Pentru a obţine succesiuni de semnale binare de lungime
maximă T0=NT=(2n-1)T, T – perioada tactului, se folosesc
registre de deplasare RD, cu n etaje. Semnalul de
reacţie x0 constă din suma modulo 2 a semnalelor de ieşire
de la anumite etaje ale registrului, fiind dat de relaţia
nnxaxaxax .....22110
x 1
x ,0
i
i
sumei
sumeiai
(2.183)
3/30/2016
7
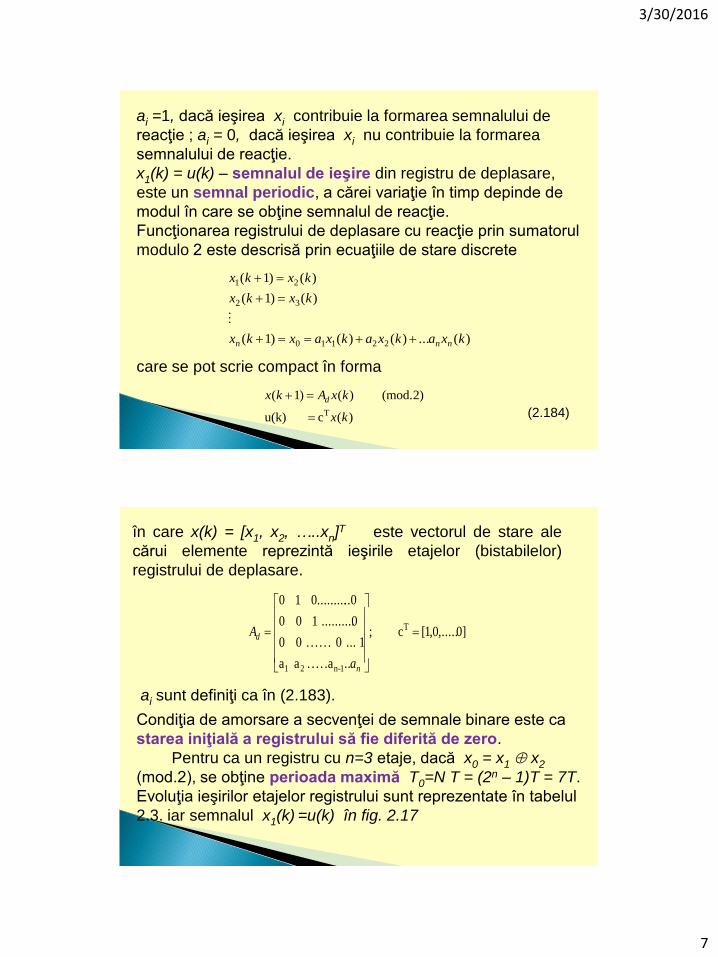
ai =1, dacă ieşirea xi contribuie la formarea semnalului de
reacţie ; ai = 0, dacă ieşirea xi nu contribuie la formarea
semnalului de reacţie.
x1(k) = u(k) – semnalul de ieşire din registru de deplasare,
este un semnal periodic, a cărei variaţie în timp depinde de
modul în care se obţine semnalul de reacţie.
Funcţionarea registrului de deplasare cu reacţie prin sumatorul
modulo 2 este descrisă prin ecuaţiile de stare discrete
)(...)()()1(
)()1(
)()1(
22110
32
21
kxakxakxaxkx
kxkx
kxkx
nnn
care se pot scrie compact în forma
)(c u(k)
(mod.2) )()1(
T kx
kxAkx d
(2.184)
în care x(k) = [x1, x2, …..xn]T este vectorul de stare ale
cărui elemente reprezintă ieşirile etajelor (bistabilelor)
registrului de deplasare.
]0,.....0,1[c ;
...a . . . . a a
1 ... 0 . . . . . . 0 0
0.......... 1 0 0
..00......... 1 0
T
1-n21
n
d
a
A
ai sunt definiţi ca în (2.183).
Condiţia de amorsare a secvenţei de semnale binare este ca
starea iniţială a registrului să fie diferită de zero.
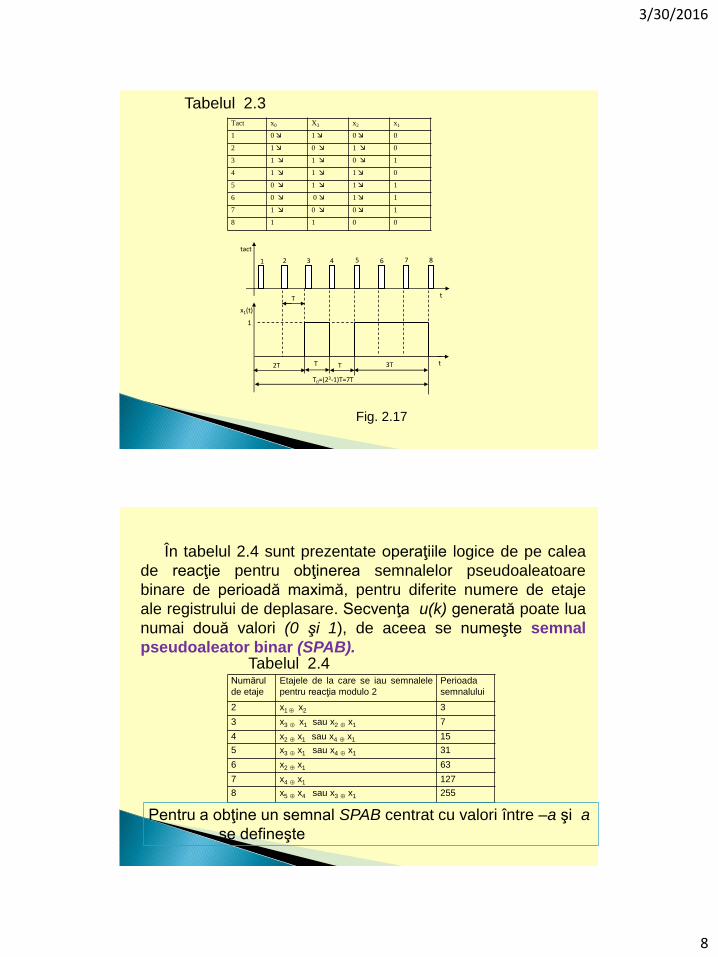
Pentru ca un registru cu n=3 etaje, dacă x0 = x1 x2
(mod.2), se obţine perioada maximă T0=N T = (2n – 1)T = 7T.
Evoluţia ieşirilor etajelor registrului sunt reprezentate în tabelul
2.3. iar semnalul x1(k) =u(k) în fig. 2.17
3/30/2016
8
Tact x0 X3 x2 x1
1 0 1 0 0
2 1 0 1 0
3 1 1 0 1
4 1 1 1 0
5 0 1 1 1
6 0 0 1 1
7 1 0 0 1
8 1 1 0 0
Tabelul 2.3
tact
x1(t)
t
t
1 2 3 4 5 6 7 8
T
1
2T T T 3T
T0=(23-1)T=7T
Fig. 2.17
În tabelul 2.4 sunt prezentate operaţiile logice de pe calea
de reacţie pentru obţinerea semnalelor pseudoaleatoare
binare de perioadă maximă, pentru diferite numere de etaje
ale registrului de deplasare. Secvenţa u(k) generată poate lua
numai două valori (0 şi 1), de aceea se numeşte semnal
pseudoaleator binar (SPAB).
Numărul
de etaje
Etajele de la care se iau semnalele
pentru reacţia modulo 2
Perioada
semnalului
2 x1 x2 3
3 x3 x1 sau x2 x1 7
4 x2 x1 sau x4 x1 15
5 x3 x1 sau x4 x1 31
6 x2 x1 63
7 x4 x1 127
8 x5 x4 sau x3 x1 255
Tabelul 2.4
Pentru a obţine un semnal SPAB centrat cu valori între –a şi a
se defineşte
3/30/2016
9
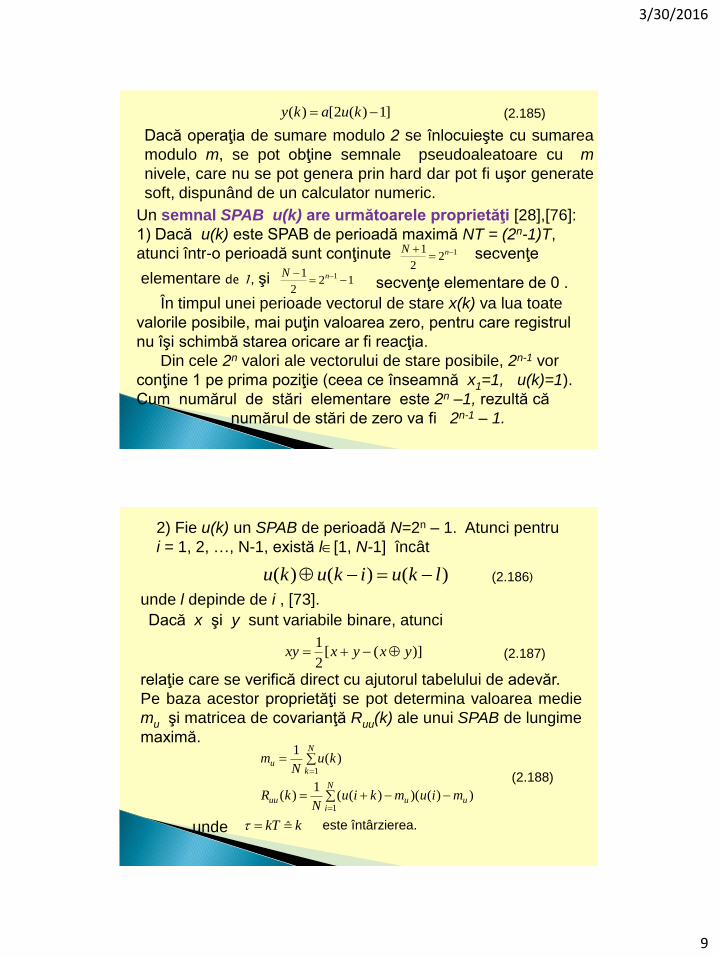
]1)(2[)( kuaky (2.185)
Dacă operaţia de sumare modulo 2 se înlocuieşte cu sumarea
modulo m, se pot obţine semnale pseudoaleatoare cu m
nivele, care nu se pot genera prin hard dar pot fi uşor generate
soft, dispunând de un calculator numeric.
Un semnal SPAB u(k) are următoarele proprietăţi [28],[76]:
1) Dacă u(k) este SPAB de perioadă maximă NT = (2n-1)T,
atunci într-o perioadă sunt conţinute secvenţe 122
1 nN
elementare de 1, şi 122
1 1 nN
secvenţe elementare de 0 .
În timpul unei perioade vectorul de stare x(k) va lua toate
valorile posibile, mai puţin valoarea zero, pentru care registrul
nu îşi schimbă starea oricare ar fi reacţia.
Din cele 2n valori ale vectorului de stare posibile, 2n-1 vor
conţine 1 pe prima poziţie (ceea ce înseamnă x1=1, u(k)=1).
Cum numărul de stări elementare este 2n –1, rezultă că
numărul de stări de zero va fi 2n-1 – 1.
2) Fie u(k) un SPAB de perioadă N=2n – 1. Atunci pentru
i = 1, 2, …, N-1, există l[1, N-1] încât
)()()( lkuikuku (2.186)
unde l depinde de i , [73].
Dacă x şi y sunt variabile binare, atunci
)]([2
1yxyxxy (2.187)
relaţie care se verifică direct cu ajutorul tabelului de adevăr.
Pe baza acestor proprietăţi se pot determina valoarea medie
mu şi matricea de covarianţă Ruu(k) ale unui SPAB de lungime
maximă.
N
iuuuu
N
ku
miumkiuN
kR
kuN
m
1
1
))()()((1
)(
)(1
(2.188)
unde kkT ˆ este întârzierea.
3/30/2016
10
2
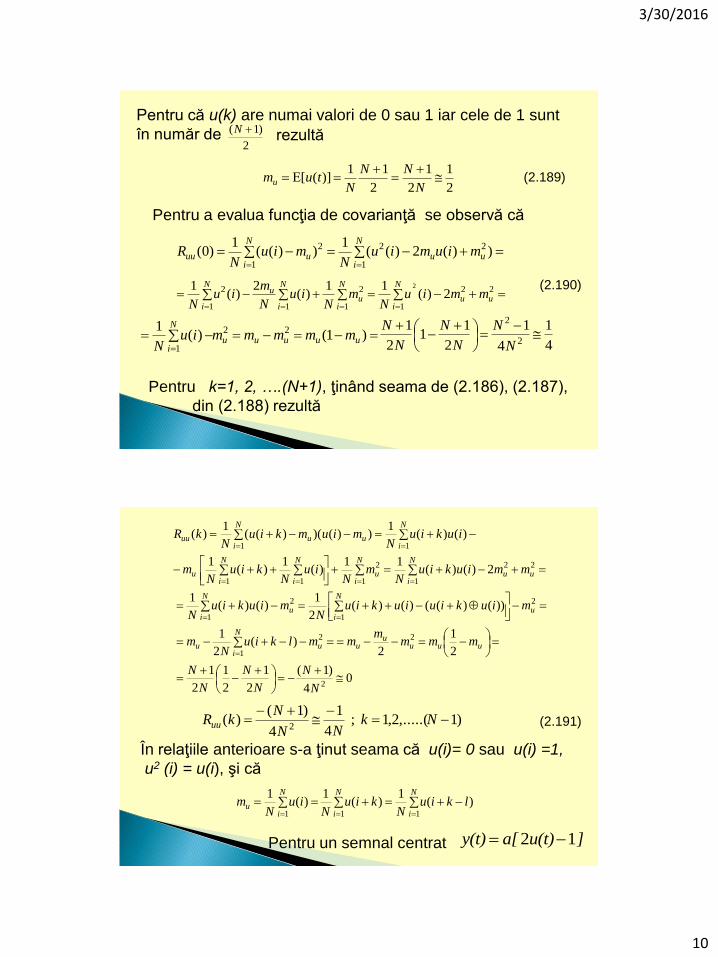
)1( NPentru că u(k) are numai valori de 0 sau 1 iar cele de 1 sunt
în număr de rezultă
2
1
2
1
2
11)]([
N
NN
Ntumu (2.189)
Pentru a evalua funcţia de covarianţă se observă că
))(2)((1
))((1
)0(1
22
1
2N
iuu
N
iuuu miumiu
Nmiu
NR
N
i
N
i
N
i
N
iuuu
u mmiuN
mN
iuN
miu
N 1 1 1 1
2222 2)(11
)(2
)(1 2
)1()(1 22
1uuuuu
N
i
mmmmmiuN 4
1
4
1
2
11
2
12
2
N
N
N
N
N
N
(2.190)
Pentru k=1, 2, ….(N+1), ţinând seama de (2.186), (2.187),
din (2.188) rezultă
04
)1(
2
1
2
1
2
1
2
1
2)(
2
1
))()(()()(2
1)()(
1
2)()(11
)(1
)(1
)()(1
))()()((1
)(
2
2
1
2
1
2
1
2
1 1
222
1 1
11
N
N
N
N
N
N
mmmm
mmlkiuN
m
miukiuiukiuN
miukiuN
mmiukiuN
mN
iuN
kiuN
m
iukiuN
miumkiuN
kR
uuuu
u
N
iuu
N
iu
N
iu
N
i
N
iuuu
N
i
N
iu
N
i
N
iuuuu
)1,.....(2,1 ; 4
1
4
)1()(
2
Nk
NN
NkRuu (2.191)
În relaţiile anterioare s-a ţinut seama că u(i)= 0 sau u(i) =1,
u2 (i) = u(i), şi că
N
i
N
i
N
iu lkiu
Nkiu
Niu
Nm
1 11
)(1
)(1
)(1
Pentru un semnal centrat ]u(t)a[y(t) 12
3/30/2016
11
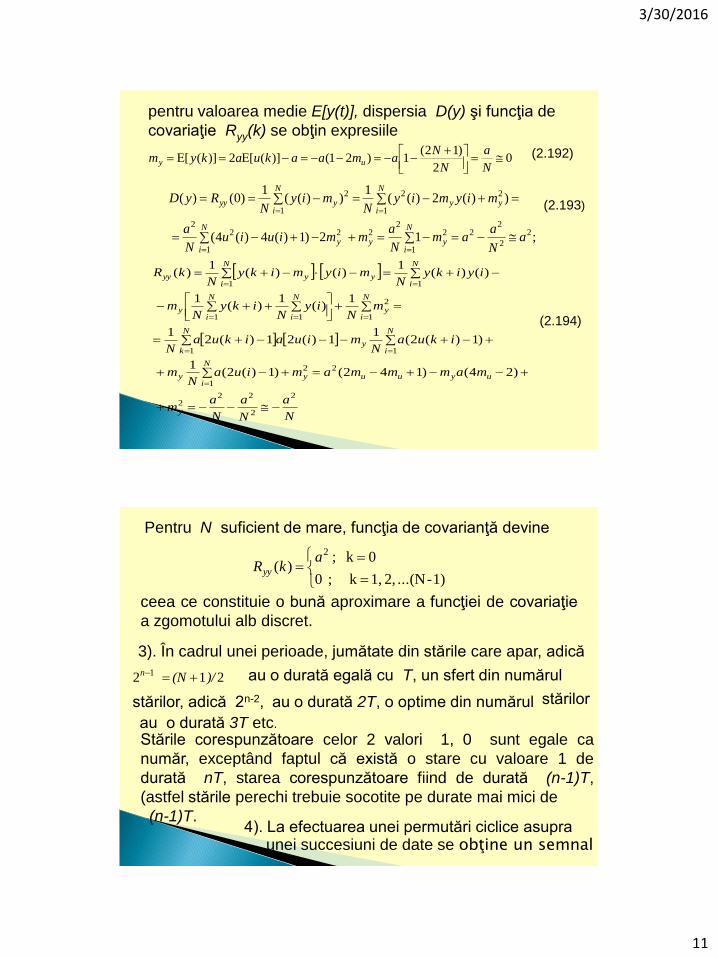
pentru valoarea medie E[y(t)], dispersia D(y) şi funcţia de
covariaţie Ryy(k) se obţin expresiile
02
)12(1)21()]([2)]([
N
a
N
Namaakuakym uy
(2.192)
;1 2)1)(4)(4(
))(2)((1
))((1
)0()(
2
2
2
1
222
22
1
22
1
22
1
2
aN
aam
N
ammiuiu
N
a
miymiyN
miyN
RyD
N
iyyy
N
i
N
iyy
N
iyyy
(2.193)
N
a
N
a
N
am
mammmamiuaN
m
ikuaN
miuaikuaN
mN
iyN
ikyN
m
iyikyN
miymikyN
kR
y
uyuuy
N
iy
N
iy
N
k
N
iy
N
i
N
iy
N
i
N
iyyyy
2
2
222
22
1
11
1
2
1 1
11
)24()142()1)(2(1
)1)(2(1
1)(21)(21
1)(
1)(
1
)()(1
)()(1
)(
(2.194)
Pentru N suficient de mare, funcţia de covarianţă devine
1)-...(N 2, 1,k ; 0
0k ;)(
2akRyy
ceea ce constituie o bună aproximare a funcţiei de covariaţie
a zgomotului alb discret.
3). În cadrul unei perioade, jumătate din stările care apar, adică
212 1 )/(N n au o durată egală cu T, un sfert din numărul
au o durată 3T etc.
stărilor, adică 2n-2, au o durată 2T, o optime din numărul stărilor
Stările corespunzătoare celor 2 valori 1, 0 sunt egale ca
număr, exceptând faptul că există o stare cu valoare 1 de
durată nT, starea corespunzătoare fiind de durată (n-1)T,
(astfel stările perechi trebuie socotite pe durate mai mici de
(n-1)T.4). La efectuarea unei permutări ciclice asupra
unei succesiuni de date se obţine un semnal
3/30/2016
12
care comparat cu cel original, prezintă un număr de coincidenţe
care este mai mic cu o unitate faţă de numărul de
necoincidenţe
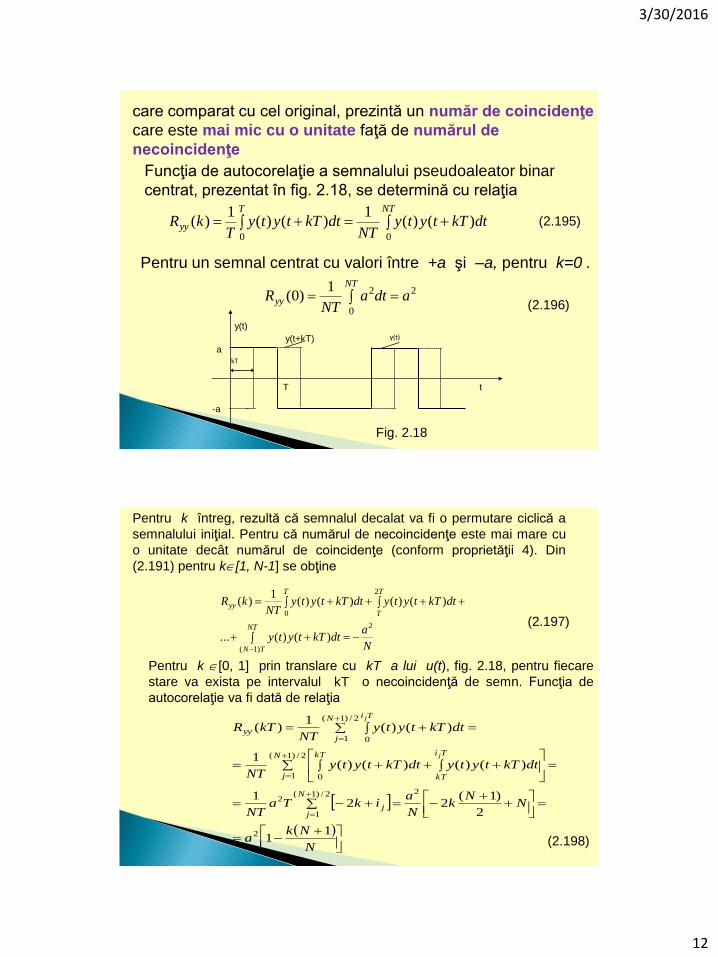
Funcţia de autocorelaţie a semnalului pseudoaleator binar
centrat, prezentat în fig. 2.18, se determină cu relaţia
T NT
yy dtkTtytyNT
dtkTtytyT
kR0 0
)()(1
)()(1
)( (2.195)
Pentru un semnal centrat cu valori între +a şi –a, pentru k=0 .
NT
yy adtaNT
R0
221)0(
(2.196)
a
y(t)y(t)y(t+kT)
T
-a
t
kT
Fig. 2.18
Pentru k întreg, rezultă că semnalul decalat va fi o permutare ciclică a
semnalului iniţial. Pentru că numărul de necoincidenţe este mai mare cu
o unitate decât numărul de coincidenţe (conform proprietăţii 4). Din
(2.191) pentru k[1, N-1] se obţine
NT
TN
T T
Tyy
N
adtkTtyty
dtkTtytydtkTtytyNT
kR
)1(
2
0
2
)()(...
)()()()(1
)(
(2.197)
Pentru k [0, 1] prin translare cu kT a lui u(t), fig. 2.18, pentru fiecare
stare va exista pe intervalul kT o necoincidenţă de semn. Funcţia de
autocorelaţie va fi dată de relaţia
N
Nka
NN
kN
aikTa
NT
dtkTtytydtkTtytyNT
dtkTtytyNT
kTR
N
jj
N
j
kT Ti
kT
N
j
Ti
yy
j
j
11
2
)1(22
1
)()()()(1
)()(1
)(
2
2/)1(
1
22
2/)1(
1 0
2/)1(
1 0
(2.198)
3/30/2016
13
2/)1(
1
N
jj Ni
unde ij este numărul de intervale ale stării j.
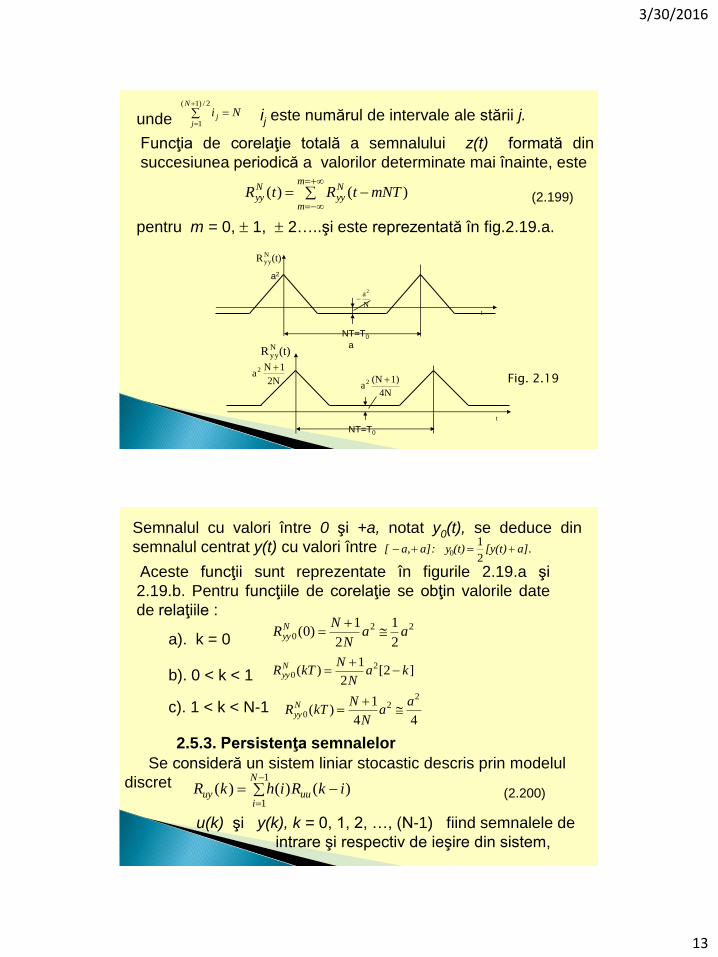
Funcţia de corelaţie totală a semnalului z(t) formată din
succesiunea periodică a valorilor determinate mai înainte, este
m
m
Nyy
Nyy mNTtRtR )()( (2.199)
pentru m = 0, 1, 2…..şi este reprezentată în fig.2.19.a.
t
NT=T0
t
a2
NT=T0
a(t)R N
yy
2N
1Na2
4N
1)(Na2
N
a2
Fig. 2.19
(t)R Nyy
Semnalul cu valori între 0 şi +a, notat y0(t), se deduce din
semnalul centrat y(t) cu valori între .2
10 a][y(t)(t)a]: ya,[
Aceste funcţii sunt reprezentate în figurile 2.19.a şi
2.19.b. Pentru funcţiile de corelaţie se obţin valorile date
de relaţiile :
a). k = 0 22
02
1
2
1)0( aa
N
NRN
yy
b). 0 < k < 1 ]2[2
1)( 2
0 kaN
NkTRN
yy
c). 1 < k < N-1 44
1)(
22
0
aa
N
NkTRN
yy
2.5.3. Persistenţa semnalelor
Se consideră un sistem liniar stocastic descris prin modelul
discret
1
1
)()()(N
iuuuy ikRihkR (2.200)
u(k) şi y(k), k = 0, 1, 2, …, (N-1) fiind semnalele de
intrare şi respectiv de ieşire din sistem,