Expérimentation: TP-cours Hacheur série et commande...
5
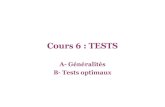
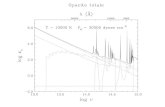
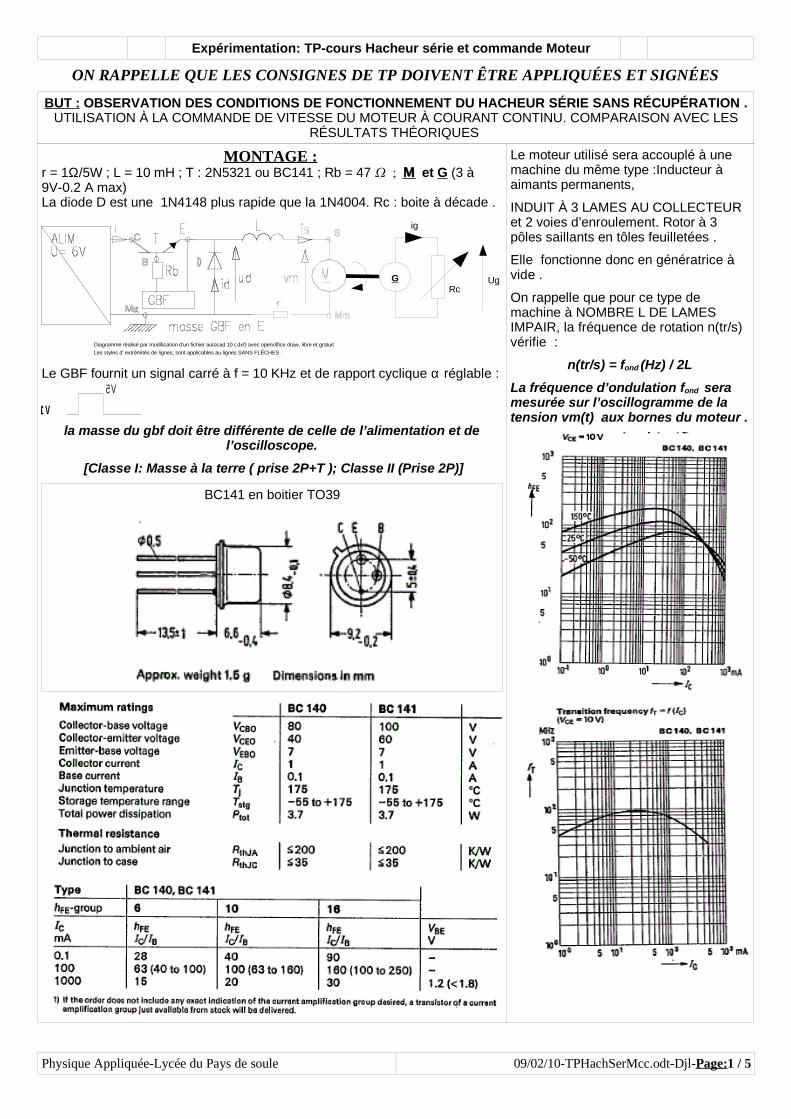
Expérimentation: TP-cours Hacheur série et commande Moteur ON RAPPELLE QUE LES CONSIGNES DE TP DOIVENT ÊTRE APPLIQUÉES ET SIGNÉES BUT : OBSERVATION DES CONDITIONS DE FONCTIONNEMENT DU HACHEUR SÉRIE SANS RÉCUPÉRATION . UTILISATION À LA COMMANDE DE VITESSE DU MOTEUR À COURANT CONTINU. COMPARAISON AVEC LES RÉSULTATS THÉORIQUES MONTAGE : r = 1Ω/5W ; L = 10 mH ; T : 2N5321 ou BC141 ; Rb = 47 ; M et G (3 à 9V-0.2 A max) La diode D est une 1N4148 plus rapide que la 1N4004. Rc : boite à décade . G ig Ug Rc Diagramme réalisé par modification d'un fichier autocad 10 (.dxf) avec openoffice draw, libre et gratuit Les styles d' extrêmités de lignes, sont applicables au lignes SANS FLÊCHES . Le GBF fournit un signal carré à f = 10 KHz et de rapport cyclique α réglable : - 1 V 5 V la masse du gbf doit être différente de celle de l’alimentation et de l’oscilloscope. [Classe I: Masse à la terre ( prise 2P+T ); Classe II (Prise 2P)] BC141 en boitier TO39 Le moteur utilisé sera accouplé à une machine du même type :Inducteur à aimants permanents, INDUIT À 3 LAMES AU COLLECTEUR et 2 voies d’enroulement. Rotor à 3 pôles saillants en tôles feuilletées . Elle fonctionne donc en génératrice à vide . On rappelle que pour ce type de machine à NOMBRE L DE LAMES IMPAIR, la fréquence de rotation n(tr/s) vérifie : n(tr/s) = fond (Hz) / 2L La fréquence d’ondulation fond sera mesurée sur l’oscillogramme de la tension vm(t) aux bornes du moteur . Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page: 1 / 5
Transcript of Expérimentation: TP-cours Hacheur série et commande...
Expérimentation: TP-cours Hacheur série et commande Moteur
ON RAPPELLE QUE LES CONSIGNES DE TP DOIVENT ÊTRE APPLIQUÉES ET SIGNÉES
BUT : OBSERVATION DES CONDITIONS DE FONCTIONNEMENT DU HACHEUR SÉRIE SANS RÉCUPÉRATION .UTILISATION À LA COMMANDE DE VITESSE DU MOTEUR À COURANT CONTINU. COMPARAISON AVEC LES
RÉSULTATS THÉORIQUES
MONTAGE : r = 1Ω/5W ; L = 10 mH ; T : 2N5321 ou BC141 ; Rb = 47 ; M et G (3 à 9V-0.2 A max)La diode D est une 1N4148 plus rapide que la 1N4004. Rc : boite à décade .
G
ig
UgRc
Diagramme réalisé par modification d'un fichier autocad 10 (.dxf) avec openoffice draw, libre et gratuit
Les styles d' extrêmités de lignes, sont applicables au lignes SANS FLÊCHES .
Le GBF fournit un signal carré à f = 10 KHz et de rapport cyclique α réglable :
-1 V
5 V
la masse du gbf doit être différente de celle de l’alimentation et de l’oscilloscope.
[Classe I: Masse à la terre ( prise 2P+T ); Classe II (Prise 2P)]
BC141 en boitier TO39
Le moteur utilisé sera accouplé à une machine du même type :Inducteur à aimants permanents,
INDUIT À 3 LAMES AU COLLECTEUR et 2 voies d’enroulement. Rotor à 3 pôles saillants en tôles feuilletées .
Elle fonctionne donc en génératrice à vide .
On rappelle que pour ce type de machine à NOMBRE L DE LAMES IMPAIR, la fréquence de rotation n(tr/s) vérifie :
n(tr/s) = fond (Hz) / 2L
La fréquence d’ondulation fond sera mesurée sur l’oscillogramme de la tension vm(t) aux bornes du moteur .
Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page:1 / 5
Expérimentation: TP-cours Hacheur série et commande Moteur
PRÉPARATION:
1/ Placer les bornes d'entrées de l'oscilloscope pour relever ud (YA) et r.is (YB). Indiquer si l'oscilloscope est de classe I (Masse à la «Terre locale »)ou de classe II (Masse Flottante).
2/ De même pour relever vm en concordance avec r.is (YB) .
PROCÉDURE:
0/ Réaliser le montage , pour relever ud (YA) et r.is (YB), et le faire vérifier par le professeur . Régler le GBF à vide avec ~ 0.5, et montrer un relevé au professeur. Vérifier le fonctionnement en variant .
1/ La génératice étant à vide, relever vm (YA) et r.is (YB) pour = 0,5 et = 0,8.
Montrer les relevés l'enseignant. Relever Vm = (vm)moy et Ud = (ud)moy dans chaque cas, ainsi que n (tr/s) .
2/ Charger G et diminuer Rc raisonnablement avec la limite ( IG max = 0.3 A ). Le couple résistant et donc le couple moteur augmente .
Relever ud (YA) et r.is (YB) et mesurer Ud = (ud)moy , ( is ) moy et is = ismax – ismin , avec = 0,5 ;pour IG = 0,1 A puis IG = 0,3 A.
3/ Ondulation de is :
Relever ud (YA) et r.is (YB) pour f = 1 Khz et f = 10 Khz . Mesurer l'ondulation is = ismax – ismin
Relever ud (YA) et r.is (YB) pour f = 10 Khz et L = 10mH puis 33 mH .
Mesurer l'ondulation is = ismax – ismin
Relever ud (YA) et r.is (YB) pour f = 10 Khz et L = 10mH, avec = 0,5 puis = 0,8.
Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page:2 / 5
Expérimentation: TP-cours Hacheur série et commande Moteur
EXPLOITATION ET ANALYSE :
EXPLOITATION EXPÉRIMENTALE:
Quelle est la grandeur électrique qui pilote n (tr / s ) ? justifier.
Quelle est la grandeur électrique qui pilote principalement Tu , le couple utile ? Justifier.
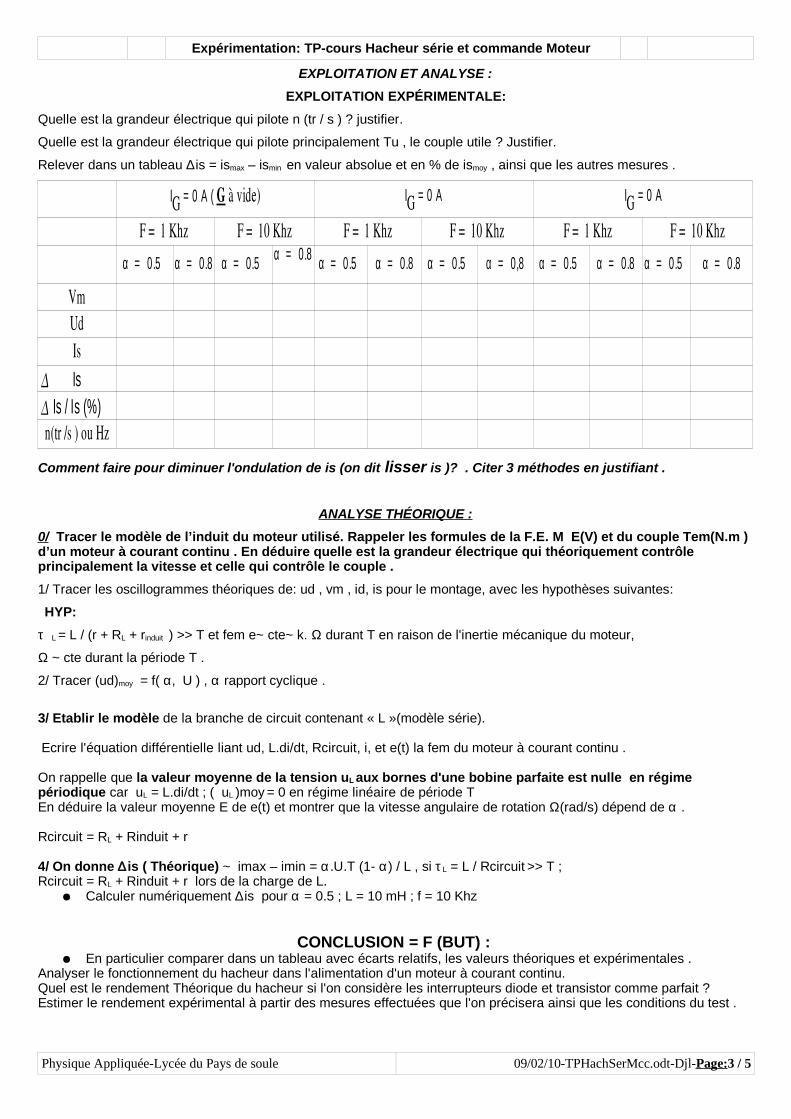
Relever dans un tableau ∆ is = ismax – ismin en valeur absolue et en % de ismoy , ainsi que les autres mesures .
IG = 0 A ( G à vide) IG = 0 A IG = 0 A
F = 1 Khz F = 10 Khz F = 1 Khz F = 10 Khz F = 1 Khz F = 10 Khz
α = 0 .5 α = 0 .8 α = 0 .5 α = 0 .8 α = 0 .5 α = 0 .8 α = 0 .5 α = 0 ,8 α = 0 .5 α = 0 .8 α = 0 .5 α = 0 .8
VmUdIsΙs
Ιs / Is (%)n(tr /s ) ou Hz
Comment faire pour diminuer l'ondulation de is (on dit lisser is )? . Citer 3 méthodes en justifiant .
ANALYSE THÉORIQUE :
0/ Tracer le modèle de l’induit du moteur utilisé. Rappeler les formules de la F.E. M E(V) et du couple Tem(N.m ) d’un moteur à courant continu . En déduire quelle est la grandeur électrique qui théoriquement contrôle principalement la vitesse et celle qui contrôle le couple .
1/ Tracer les oscillogrammes théoriques de: ud , vm , id, is pour le montage, avec les hypothèses suivantes:
HYP:
τ L = L / (r + RL + rinduit ) >> T et fem e~ cte~ k. Ω durant T en raison de l'inertie mécanique du moteur,
Ω ~ cte durant la période T .
2/ Tracer (ud)moy = f( α, U ) , α rapport cyclique .
3/ Etablir le modèle de la branche de circuit contenant « L »(modèle série).
Ecrire l'équation différentielle liant ud, L.di/dt, Rcircuit, i, et e(t) la fem du moteur à courant continu .
On rappelle que la valeur moyenne de la tension uL aux bornes d'une bobine parfaite est nulle en régime périodique car uL = L.di/dt ; ( uL )moy = 0 en régime linéaire de période T En déduire la valeur moyenne E de e(t) et montrer que la vitesse angulaire de rotation Ω(rad/s) dépend de α .
Rcircuit = RL + Rinduit + r
4/ On donne ∆ is ( Théorique) ~ imax – imin = α.U.T (1- α) / L , si τ L = L / Rcircuit >> T ; Rcircuit = RL + Rinduit + r lors de la charge de L.
Calculer numériquement ∆ is pour α = 0.5 ; L = 10 mH ; f = 10 Khz
CONCLUSION = F (BUT) : En particulier comparer dans un tableau avec écarts relatifs, les valeurs théoriques et expérimentales .
Analyser le fonctionnement du hacheur dans l'alimentation d'un moteur à courant continu. Quel est le rendement Théorique du hacheur si l'on considère les interrupteurs diode et transistor comme parfait ? Estimer le rendement expérimental à partir des mesures effectuées que l'on précisera ainsi que les conditions du test .
Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page:3 / 5
Expérimentation: TP-cours Hacheur série et commande Moteur
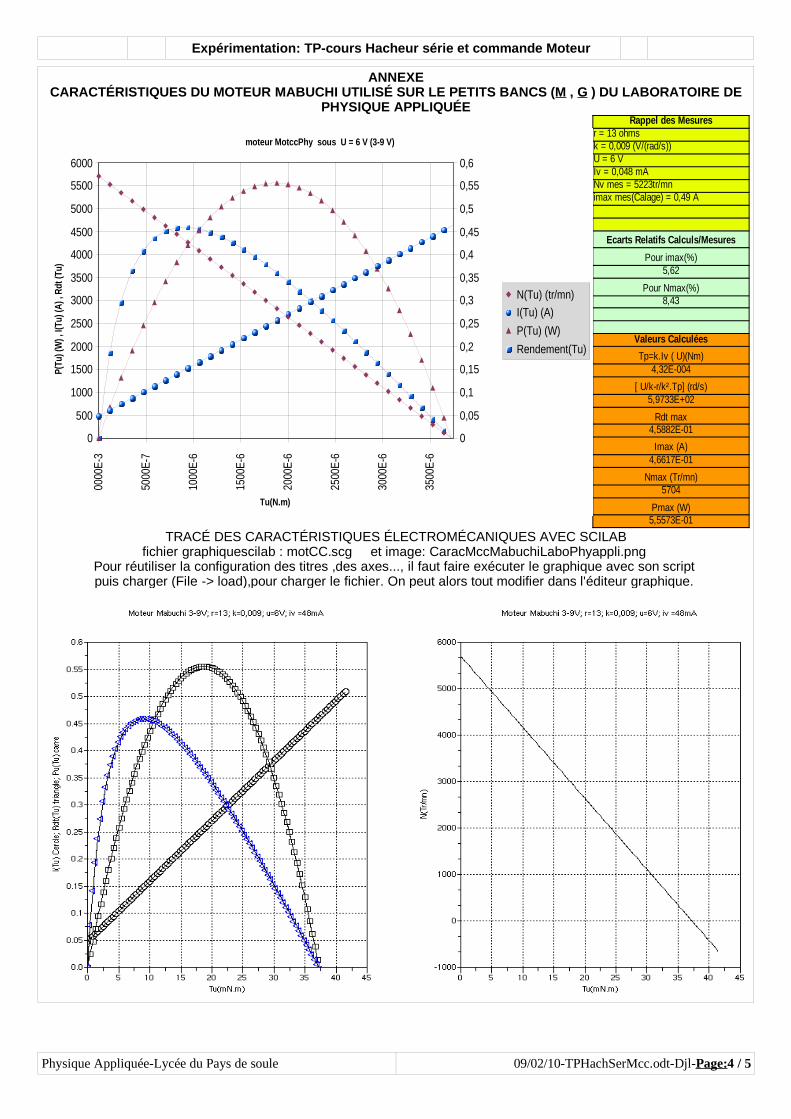
ANNEXECARACTÉRISTIQUES DU MOTEUR MABUCHI UTILISÉ SUR LE PETITS BANCS (M , G ) DU LABORATOIRE DE
PHYSIQUE APPLIQUÉERappel des Mesures
r = 13 ohmsk = 0,009 (V/(rad/s))U = 6 VIv = 0,048 mANv mes = 5223tr/mnimax mes(Calage) = 0,49 A
5,62
8,43
Valeurs Calculées
4,32E-004
5,9733E+02
4,5882E-01
4,6617E-01
5704
5,5573E-01
Ecarts Relatifs Calculs/Mesures
Pour imax(%)
Pour Nmax(%)
Tp=k.Iv ( U)(Nm)
[ U/k-r/k².Tp] (rd/s)
Rdt max
Imax (A)
Nmax (Tr/mn)
Pmax (W)
0000
E-3
5000
E-7
1000
E-6
1500
E-6
2000
E-6
2500
E-6
3000
E-6
3500
E-6
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
5500
6000
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0,55
0,6
moteur MotccPhy sous U = 6 V (3-9 V)
N(Tu) (tr/mn)
I(Tu) (A)
P(Tu) (W)
Rendement(Tu)
Tu(N.m)
P(Tu
) (W
) , I(
Tu) (
A) ,
Rdt
(Tu)
TRACÉ DES CARACTÉRISTIQUES ÉLECTROMÉCANIQUES AVEC SCILABfichier graphiquescilab : motCC.scg et image: CaracMccMabuchiLaboPhyappli.png
Pour réutiliser la configuration des titres ,des axes..., il faut faire exécuter le graphique avec son script puis charger (File -> load),pour charger le fichier. On peut alors tout modifier dans l'éditeur graphique.
Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page:4 / 5
Expérimentation: TP-cours Hacheur série et commande Moteur
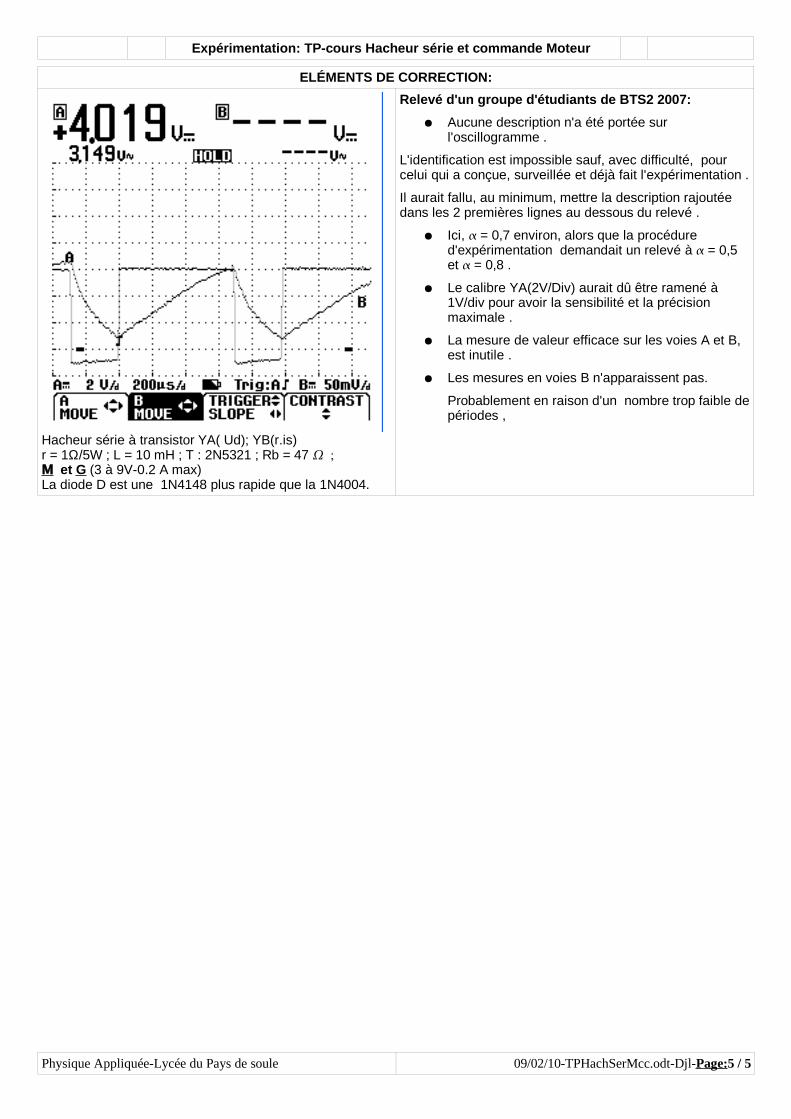
ELÉMENTS DE CORRECTION:
Hacheur série à transistor YA( Ud); YB(r.is) r = 1Ω/5W ; L = 10 mH ; T : 2N5321 ; Rb = 47 ; M et G (3 à 9V-0.2 A max)La diode D est une 1N4148 plus rapide que la 1N4004.
Relevé d'un groupe d'étudiants de BTS2 2007:
Aucune description n'a été portée sur l'oscillogramme .
L'identification est impossible sauf, avec difficulté, pour celui qui a conçue, surveillée et déjà fait l'expérimentation .
Il aurait fallu, au minimum, mettre la description rajoutée dans les 2 premières lignes au dessous du relevé .
Ici, = 0,7 environ, alors que la procédure d'expérimentation demandait un relevé à = 0,5 et = 0,8 .
Le calibre YA(2V/Div) aurait dû être ramené à 1V/div pour avoir la sensibilité et la précision maximale .
La mesure de valeur efficace sur les voies A et B, est inutile .
Les mesures en voies B n'apparaissent pas.
Probablement en raison d'un nombre trop faible de périodes ,
Physique Appliquée-Lycée du Pays de soule 09/02/10-TPHachSerMcc.odt-Djl-Page:5 / 5


![Cours Elements Finis[1]](https://static.fdocument.org/doc/165x107/5571fa2449795991699162f9/cours-elements-finis1.jpg)