DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE … · Day 3 Lecture 1 Retrieval techniques - Erkki...
24
Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1 DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING Inversion basics Erkki Kyrölä Finnish Meteorological Institute y = Kx + ε ˆ x = (K T K ) −1 K T y
Transcript of DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE … · Day 3 Lecture 1 Retrieval techniques - Erkki...

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Inversion basics
Erkki KyröläFinnish Meteorological Institute
y = Kx + εˆ x = (KTK)−1KT y

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 2
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Contents
1. Introduction: Measurements, models, inversion
2. Classical inversion: LSQ3. Bayes theory4. Monte Carlo Markov Chain5. References

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 3
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Introduction
instrumenttarget
Inverse model
inverse model = generalized inverse of the approximate forward model
data
Forward model

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 4
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Measurements
• Measurements either count or scale• Remote and in situ measurements• Direct and indirect measurements• Classical or quantum measurements

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 5
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Atmospheric remote measurements
• Atmosphere is continuously changing in time and space.No repeated measurements of the same quantity.
• Radiation field measurements are direct, all othermeasurements are indirect
• Measurements probe large atmospheric volume. Large averaging. Validation by in situ measurements is difficult.

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 6
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Forward models
The “true” nature
z=all other pertinent variables
G(x,z) + ε
Gknown (x,zknown = z fix ) + ε
The best forward model available.Uninteresting variables fixed.
Gapp (x,zknown = z fix ) + ε
Model used in simulation Ginv (x,zknown = z fix ) + ε
Model used for inversion

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 7
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Inverse problem
x = Parameters to be determined from measurements
K = Forward model y = Measurements (data)ε = Noise
y = K(x) + ε
Find best x when y is measured.Define “best” first.

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 8
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Least squares solution (LSQ)
S = (yp − K p (x))2∑Minimize
If we have a linear problem
y = Kxwe get simply
ˆ x = (KTK)−1KT y
Distance between dataand the model prediction

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 9
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
A systematic basis for inversion theory is given by
the Bayesian approach
• Model parameters are random variables• Probability distribution of model parameters is retrieved• A priori information is needed. This has led to many
controversies about the Bayesian approach.

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 10
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
P(x | y)P(y) = P(y | x)P(x)
P(x | y) =P(y | x)P(x)
P(y)=
P(y | x)P(x)P(y | x)P(x)dx∫
P(x|y) = Conditional probability distribution for model parameters x given data y
P(x) = A priori probability for model parametersP(y|x) = Conditional pdf for data y when x given. Also
called as likelihood.P(y) = The normalization. It can usually be ignored.
Bayesian method

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 11
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
• Mean• Minimum variance
• Maximum probability
Various point estimators for x
Mean = Minimum variance estimator
Mean = Maximum probability if pdf symmetric

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 12
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
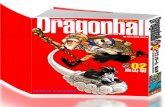
MCMCmethod
Maximumlikelihood
LSQ
Gaussian errors
max of
max of MAP
Linearmodel
LMmethod
Closedsolution
Whole distribution Point estimation
P(x | y) = P(y | x)P(x)

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 13
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Example: Linear problem
y = K true x true + ε ≈ Kx + ε
Assume Gaussian noise and prior distribution:
P(y | x) = const × e−
12
(y−Kx )T CD−1 (y−Kx )
const = ((2π )N det(CD ))−
12
P(x) = const × e−
12
(x−xa )T Ca−1 (x−xa )

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 14
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
ˆ x = (KTCD−1K + Ca
−1)−1(KTCD−1y + Ca
−1xa )
Cx = (KTCD−1K + Ca
−1)−1
P(x | y) = const × e−
12
(x− ˆ x )T Cx−1 (x− ˆ x )
ˆ x = xa + CaKT (KCaK
T + CD−1)−1(y − Kxa )
Maximum a posteriori
The solution can be written also as
This can be viewed as an update to a priori Assimilation
Interpretation: weighted mean between data and a priori
Posterior distribution
Model covariance

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 15
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Properties of linear solution
Averaging kernel
ˆ x = (KTCD−1K + Ca
−1)−1(KTCD−1y + Ca
−1xa )= CxK
TCD−1K true x true + CxK
TCD−1ε + CxCa
−1xa
A = CxKTCD
−1K true
ˆ x − x = (A − I)(x − xa ) + CxKTCD
−1εsmoothing error random error

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 16
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Bias ˆ x = CxKTCD
−1K true x true + CxKTCD
−1 ε + CxCa−1xa
Ca → ∞If and K = K true no bias
Quality of retrieval
The bias in retrieval can usually be checked only by computer simulations. Intercomparisons of real measurements can also be used to detect bias.
Residual Investigate the difference d = yobs − ymod = yobs − Kˆ x
Chi2 χ 2 =1
N − m( (yobs − Kˆ x )∑ T
CD−1(yobs − Kˆ x ) + ( ˆ x − xa )T Ca
−1( ˆ x − xa ))
linear

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 17
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Special cases
1. No apriori Ca → ∞ and K = K true
A=1 and we obtain WLSQ
2. Connection to elementary data analysis. Take case 1 andonly one parameter. Then the MAP estimator is mean and
Cx =σ 2
N i.e. the standard error of the mean.

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 18
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Possible solutions for linear equations
Number of data = N, number of unknowns = M
1. N = M Exact inversion possible
2. N > M Overdetermined problem. Additional information may be used to constrain the solution.
3. N < M Underdetermined problem. Needs additional information or constraints

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 19
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Non-linear problems
• Gaussian errors and linear model give a quadratic optimisation problem. This leads to linear (in data) estimates.
• All other cases lead to non-linear problems.
• Gaussian errors and non-linear models can be approached by the Levenberg-Marquardt algorithm
• Sometimes a model can also be linearised
• Sometimes we can transform the problem to a new linear problem. Note: Error statistics will also change
• With very noisy data and/or complicated models several maxima of pdfcan exist. Global methods, like simulated annealing, may help but it is better to try MCMC.

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 20
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Ultimate estimators: Markov chain Monte Carlo Blind Mr. Levenberg: That’s it!
Mr. Markov: Hold your horses
Twin peaks drama
Top guy: Yes! Mean guy: <Sorry but...>
Flatness dullness

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 21
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Markov chain Monte Carlo
<xi>= Σ zti
Estimators from MCMC
1N t
N

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 22
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
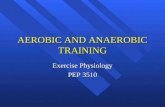
Marginal posterior distributions at 30 km for different gases
Brightstar
Weakstar
MCMC examples (GOMOS)

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 23
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
A priori information
• Discrete grid: Assume that profile has only a finite number of free parameters
• Smoothness: Tikhonov constraint
• A priori profile
• Positivity constraint or similar

Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 24
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING
Literature and a referenceTarantola: Inverse problem theory, Methods for datafitting and model parameter estimation, Elsevier, 1987
Rodgers: Inverse Methods for Atmospheric Sounding: Theory and Practice, World Scientific, 2000
Menke: Geophysical data analysis: discrete inverse theory, Academic Press, 1984
Tamminen and Kyrölä, JGR, 106, 14377, 2001
Tamminen: Ph.D. thesis, FMI contributions 47, 2004.