C:/Users/ManuelRicou/Dropbox/IST FILES/IST/Textos/CDI ... · Registamos tamb´em diversas...
27
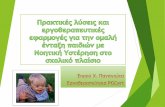
Cap´ ıtulo 4 Integrais 4.1 Introdu¸ c˜ ao A no¸ c˜ ao de integral ´ e f´acil de descrever geometricamente, porque est´ a di- rectamente relacionada com a de ´ area de figuras planas. Por exemplo, se f (x)= x 2 ent˜ ao o integral de f de x = 0 at´ e x = 1 pode ser designado 1 0 x 2 dx, e´ ea´ area da regi˜ ao do plano definida por 0 ≤ x ≤ 1e0 <y<x 2 . Ω 1 y = x 2 Figura 4.1.1: 1 0 x 2 dx = ´ Area(Ω) Dada uma qualquer fun¸ c˜ ao real f definida pelo menos no intervalo I =[a, b], o conjunto limitado pelo gr´ afico de f , o eixo dos xx e as rectas verticais x = a e x = b ´ ea regi˜ ao de ordenadas de f (em I ). Designando aqui essa regi˜ ao por Ω, e supondo que f (x) ≥ 0 para qualquer x ∈ I , temos ent˜ ao Ω= {(x, y): a ≤ x ≤ b e0 <y<f (x)} e 145
Transcript of C:/Users/ManuelRicou/Dropbox/IST FILES/IST/Textos/CDI ... · Registamos tamb´em diversas...
Capıtulo 4
Integrais
4.1 Introducao
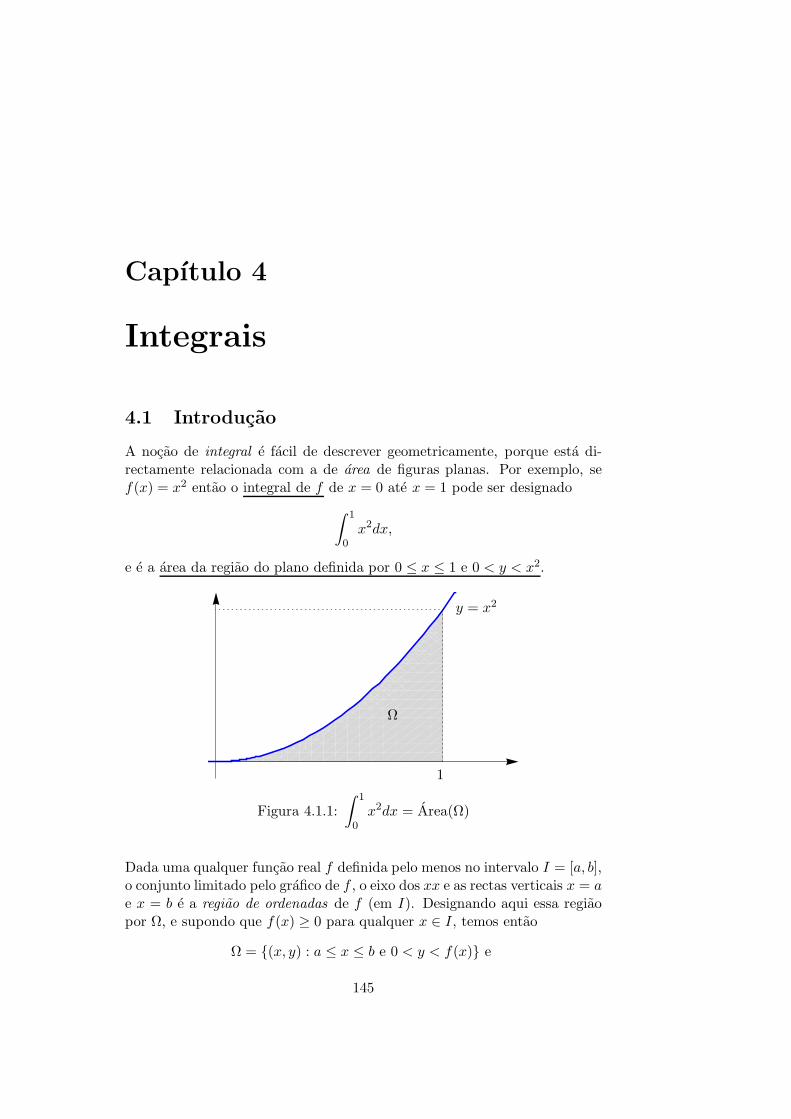
A nocao de integral e facil de descrever geometricamente, porque esta di-rectamente relacionada com a de area de figuras planas. Por exemplo, sef(x) = x2 entao o integral de f de x = 0 ate x = 1 pode ser designado
∫
1
0
x2dx,
e e a area da regiao do plano definida por 0 ≤ x ≤ 1 e 0 < y < x2.
Ω
1
y = x2
Figura 4.1.1:
∫
1
0
x2dx = Area(Ω)
Dada uma qualquer funcao real f definida pelo menos no intervalo I = [a, b],o conjunto limitado pelo grafico de f , o eixo dos xx e as rectas verticais x = ae x = b e a regiao de ordenadas de f (em I). Designando aqui essa regiaopor Ω, e supondo que f(x) ≥ 0 para qualquer x ∈ I, temos entao
Ω = (x, y) : a ≤ x ≤ b e 0 < y < f(x) e
145
146 CAPITULO 4. INTEGRAIS
∫ b
a
f(x)dx = Area(Ω)
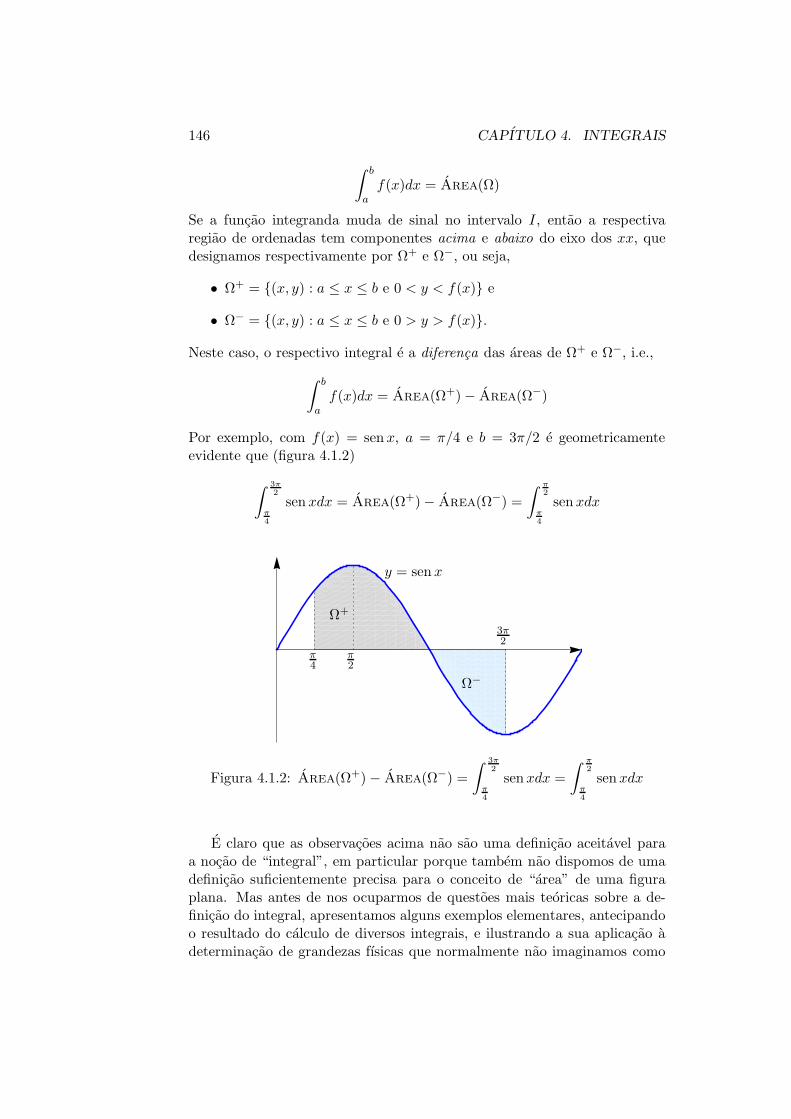
Se a funcao integranda muda de sinal no intervalo I, entao a respectivaregiao de ordenadas tem componentes acima e abaixo do eixo dos xx, quedesignamos respectivamente por Ω+ e Ω−, ou seja,
• Ω+ = (x, y) : a ≤ x ≤ b e 0 < y < f(x) e
• Ω− = (x, y) : a ≤ x ≤ b e 0 > y > f(x).
Neste caso, o respectivo integral e a diferenca das areas de Ω+ e Ω−, i.e.,
∫ b
a
f(x)dx = Area(Ω+)− Area(Ω−)
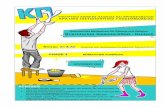
Por exemplo, com f(x) = senx, a = π/4 e b = 3π/2 e geometricamenteevidente que (figura 4.1.2)
∫ 3π
2
π
4
senxdx = Area(Ω+)− Area(Ω−) =
∫ π
2
π
4
senxdx
Ω+
Ω−
π4
π2
3π2
y = senx
Figura 4.1.2: Area(Ω+)− Area(Ω−) =
∫ 3π
2
π
4
senxdx =
∫ π
2
π
4
senxdx
E claro que as observacoes acima nao sao uma definicao aceitavel paraa nocao de “integral”, em particular porque tambem nao dispomos de umadefinicao suficientemente precisa para o conceito de “area” de uma figuraplana. Mas antes de nos ocuparmos de questoes mais teoricas sobre a de-finicao do integral, apresentamos alguns exemplos elementares, antecipandoo resultado do calculo de diversos integrais, e ilustrando a sua aplicacao adeterminacao de grandezas fısicas que normalmente nao imaginamos como

4.1. INTRODUCAO 147
“areas”. Registamos tambem diversas convencoes de terminologia que usa-remos no que segue, e respeitantes ao sımbolo:
∫ b
a
f(x)dx
Dizemos que f e a funcao integranda, o intervalo I = [a, b] e a regiao deintegracao, e x e a variavel de integracao. A variavel de integracao e muda,porque pode ser substituıda por qualquer outro sımbolo sem alterar o valordo integral, e por vezes e omitida, i.e.,
∫ b
a
f(x)dx =
∫ b
a
f(t)dt =
∫ b
a
f(s)ds =
∫ b
a
f
Se I = [a, b], escrevemos tambem∫
If em vez de
∫ b
af .
Exemplos 4.1.1.
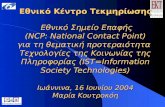
(1) Se f e constante e igual a c no intervalo [a, b], entao a sua regiao de ordenadase um rectangulo de base b− a e altura |c|, e portanto temos
∫
b
a
cdx = c(b− a).
O sinal algebrico deste integral e o sinal de c, de acordo com a convencaoilustrada na figura 4.1.2.
(2) Se f(x) = x e I = [0, b] entao a regiao de ordenadas de f em I e um triangulode base e altura b, com area b2/2. Concluımos que
∫ b
0
xdx =b2
2.
(3) Em geral, se o grafico de f e uma recta, i.e., se f(x) = mx + p, entaoa sua regiao de ordenadas e um trapezio, e a sua area pode ser calculadamultiplicando a sua largura, que e b− a, pela sua altura media, que e
f(a) + f(b)
2=
(ma+ p) + (mb + p)
2= m
a+ b
2+ p.
Concluımos que
∫
b
a
(mx+ p)dx = [ma+ b
2+ p](b− a) =
m
2(b2 − a2) + p(b− a).
(4) Se f(x) =√1− x2 para 0 ≤ x ≤ 1 entao a regiao de ordenadas de f e um
quarto de cırculo de raio 1, e devemos ter
∫ 1
0
√
1− x2dx =π
4.

148 CAPITULO 4. INTEGRAIS
a
a
b
bb
c(1) y = c (2) y = x
(3) y = mx+ p (4) y =√1− x2
Figura 4.1.3: Exemplos 4.1.1, (1) a (4).
(5) A identidade no exemplo (3) continua valida, mesmo que a funcao f mudede sinal na regiao de integracao, apesar do resultado deixar de representardirectamente uma area. Em qualquer caso, e sempre possıvel interpretar esteresultado de multiplas maneiras:
• Se f representa a velocidade (em funcao do tempo) de um ponto materialem movimento rectilıneo, e natural usar v em lugar de f , e representara variavel independente por t. Neste caso, m = dv
dt= a e a aceleracao,
e p = v(0) = v0 e a velocidade inicial. Temos entao v(t) = at + v0, eo movimento e uniformemente acelerado. A formula acima, escrita coma = t1 e b = t2, da o deslocamento1 do ponto em causa no intervalo[t1, t2], que e:
∫
t2
t1
(at+ v0)dt =a
2(t22 − t21) + v0(t2 − t1).
O caso particular em que a = g, t1 = v0 = 0 e t2 = t, da para odeslocamento o valor de 1
2gt2, que e a famosa formula da “queda dos
graves” descoberta por Galileu.
• Para uma outra possıvel interpretacao do mesmo resultado, imagine-seuma mola, com comprimento “natural” x0, colocada segundo o eixo dosxx, com uma extremidade fixa na origem x = 0. A forca f com que a molaresiste a sua deformacao e dada em primeira aproximacao por f(x) =
1O deslocamento e a distancia que separa a posicao final da posicao inicial, afectadapor um sinal algebrico negativo, se a posicao final esta a esquerda da posicao inicial.

4.1. INTRODUCAO 149
−k(x−x0), onde k > 0 e a constante de Hooke, que depende do materialque constitui a mola, e da sua forma, e x e a posicao da extremidade livreda mola. Se a mola for deformada lentamente do comprimento x0 parax1 entao o trabalho exigido por essa deformacao e
−∫ x1
x0
f(x)dx =
∫ x1
x0
k(x− x0)dx =
k
2(x2
1 − x20)− kx0(x1 − x0) =
k
2(x1 − x0)
2
A funcao U(x) = k
2(x− x0)
2 e a energia (potencial) elastica armazenadana mola, quando o seu comprimento e x.
A questao do calculo de integrais/areas e estudada literalmente ha mi-lhares de anos, e em particular a solucao do problema referido na figura4.1.1 e usualmente atribuıda ao famoso Arquimedes(2). Ainda hoje usamosa expressao “quadratura do cırculo” para indicar um problema particular-mente difıcil de resolver, talvez desconhecendo que essa expressao e um ecolongınquo de trabalhos na Antiguidade Classica sobre a definicao e calculode areas. A “quadratura do cırculo” era simplesmente a construcao de umquadrado com area igual a de um dado cırculo, ou seja, era o problema decalcular a area de um cırculo por metodos geometricos(3).
Note-se desde ja que, tal como so e possıvel calcular a derivada defuncoes diferenciaveis, tambem so e possıvel calcular o integral de funcoesintegraveis. Veremos mais adiante como a tecnica utilizada por Arquimedesha 24 seculos para calcular a area de um sector parabolico e efectivamentea base da definicao rigorosa do que chamamos integral de Riemann, quepermite dar uma primeira resposta a questao de saber exactamente o que euma “funcao integravel”, mas por enquanto limitamo-nos a apresentar umconjunto de resultados elementares que ainda nao podemos demonstrar, masque em qualquer caso sao “naturais” a luz da interpretacao geometrica quedemos para o integral.
Teorema 4.1.2. Se f e integravel no intervalo [a, b] e c ∈ [a, b] entao f eintegravel em qualquer intervalo [c, d] ⊆ [a, b] e temos
∫ c
a
f(x)dx+
∫ b
c
f(x)dx =
∫ b
a
f(x)dx, para qualquer c ∈ [a, b].
E por vezes conveniente considerar integrais da forma∫ b
af(x)dx com
b < a. Utilizamos neste caso a definicao∫ b
a
f(x)dx = −∫ a
b
f(x)dx
2Arquimedes, matematico e engenheiro, foi um dos maiores cientistas da Historia.Viveu em Siracusa, no seculo III AC.
3A “construcao” em causa era suposta usar apenas um compasso e uma regua (semmarcas!), e so nos finais do seculo XIX se veio a mostrar ser ımpossıvel com essas limitacoes.
150 CAPITULO 4. INTEGRAIS
a c
b
y = f(x)
Figura 4.1.4:
∫ c
a
f(x)dx+
∫ b
c
f(x)dx =
∫ b
a
f(x)dx
Com esta convencao, e facil obter o seguinte
Corolario 4.1.3. Se f e integravel no intervalo I entao∫ c
a
f(x)dx+
∫ b
c
f(x)dx =
∫ b
a
f(x)dx, para quaisquer a, b, c ∈ I.
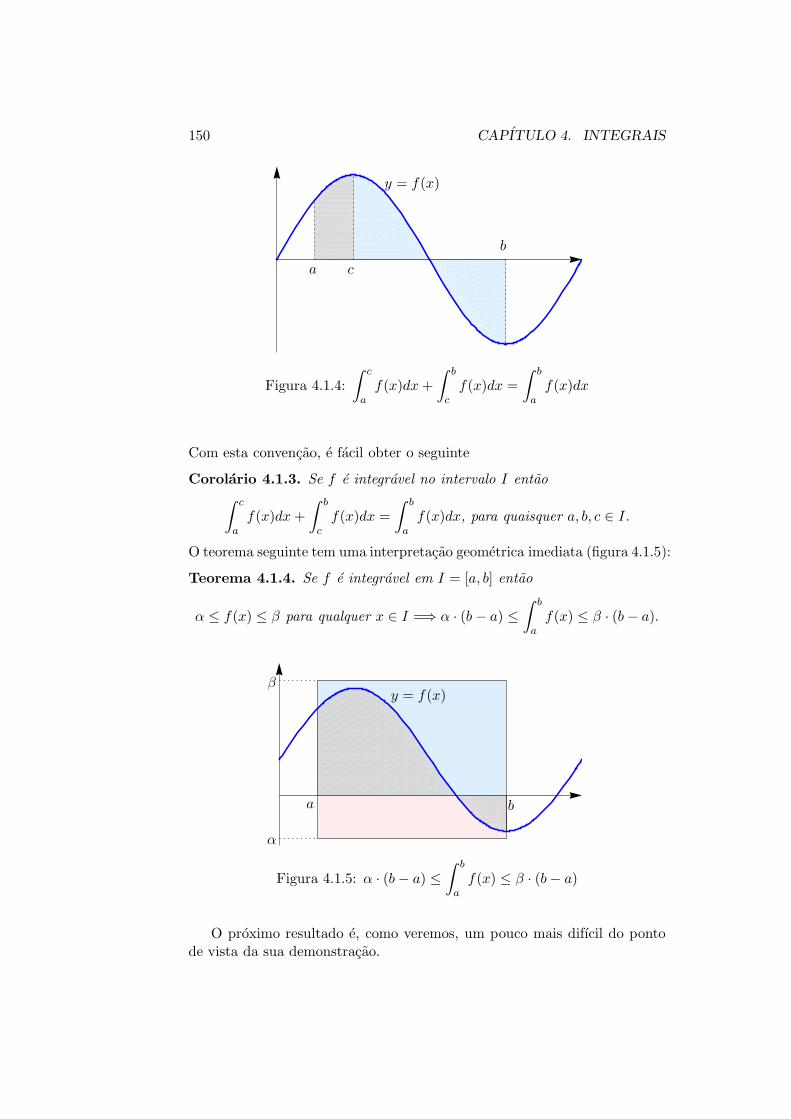
O teorema seguinte tem uma interpretacao geometrica imediata (figura 4.1.5):
Teorema 4.1.4. Se f e integravel em I = [a, b] entao
α ≤ f(x) ≤ β para qualquer x ∈ I =⇒ α · (b− a) ≤∫ b
a
f(x) ≤ β · (b− a).
a b
α
βy = f(x)
Figura 4.1.5: α · (b− a) ≤∫ b
a
f(x) ≤ β · (b− a)
O proximo resultado e, como veremos, um pouco mais difıcil do pontode vista da sua demonstracao.
4.2. OS TEOREMAS FUNDAMENTAIS DO CALCULO 151
Teorema 4.1.5. Se f e contınua no intervalo [a, b] entao f e integravel nomesmo intervalo.
A ideia mais essencial a resolucao “pratica” do problema do calculo deintegrais/areas foi descoberta apenas no seculo XVII, quando Newton e Leib-niz criaram o Calculo Diferencial e Integral na forma em que actualmenteo conhecemos. O ponto mais basico dessa ideia e o de considerar a questaoda integracao nao como a determinacao de um numero, mas como a deter-minacao de uma funcao. Mais especificamente, dizemos que um integral
indefinido e uma funcao da forma
F (t) =
∫ t
a
f(x) dx, onde a ∈ R esta fixo e t e a variavel de A.
Notamos do teorema 4.1.2 que, se f e integravel no intervalo I e se fixarmosa ∈ I, entao a funcao A esta definida para qualquer t ∈ I. Um integraldefinido e da forma
∫ c
b
f(x) dx, onde b, c ∈ R estao fixos.
A relacao entre integrais definidos e indefinidos e muito simples, e resultado corolario 4.1.3 que, para quaisquer b, c ∈ I, temos
∫ b
a
f(x) dx+
∫ c
b
f(x) dx =
∫ c
a
f(x) dx, ou seja,
∫ c
b
f(x) dx = F (c)−F (b)
4.2 Os Teoremas Fundamentais do Calculo
A descoberta verdadeiramente crucial feita no seculo XVII e a de que, sendoo calculo de um integral indefinido aparentemente muito difıcil, a deter-minacao da respectiva derivada e trivial. Exploramos esta observacao nosexemplos seguintes, onde regressamos a parabola de Arquimedes.
Exemplos 4.2.1.
(1) Consideramos o integral indefinido dado por (do exemplo de Arquimedes):
(1) A(t) =
∫ t
0
x2dx, t ∈ R
A tıtulo de ilustracao, temos tambem
∫ 2
1
x2dx = A(2)−A(1),
∫
−3
5
x2dx = A(−3)−A(5), etc.
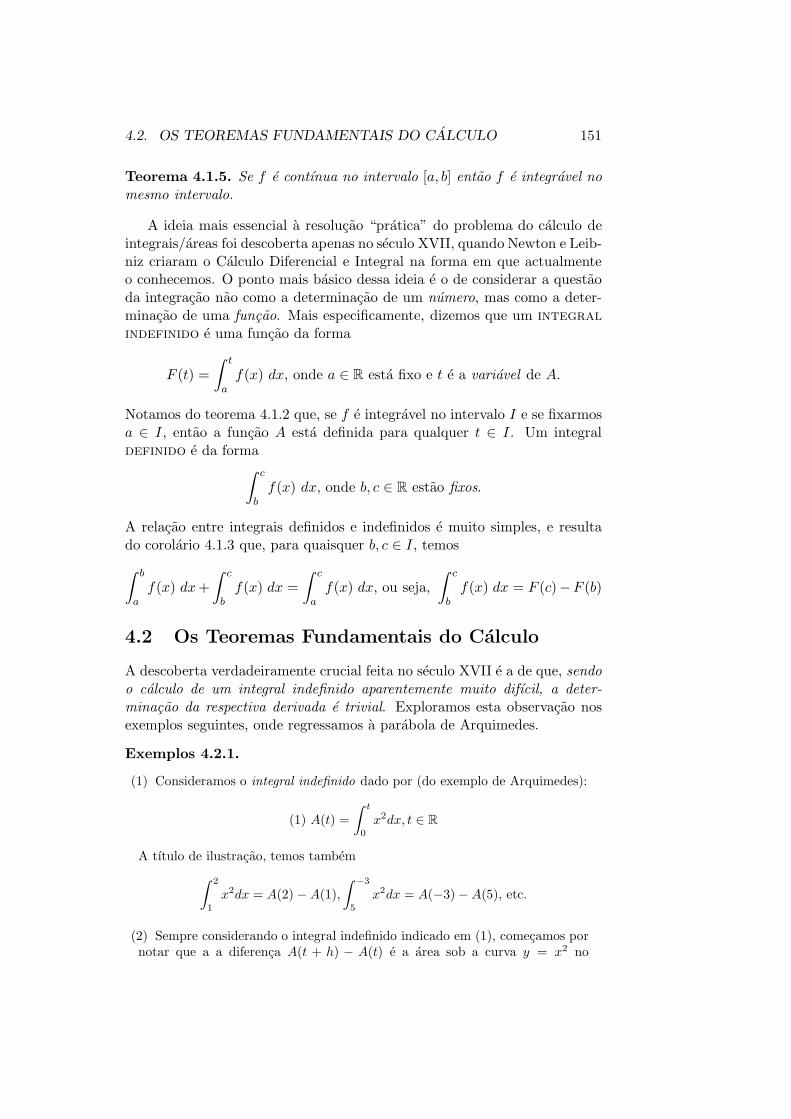
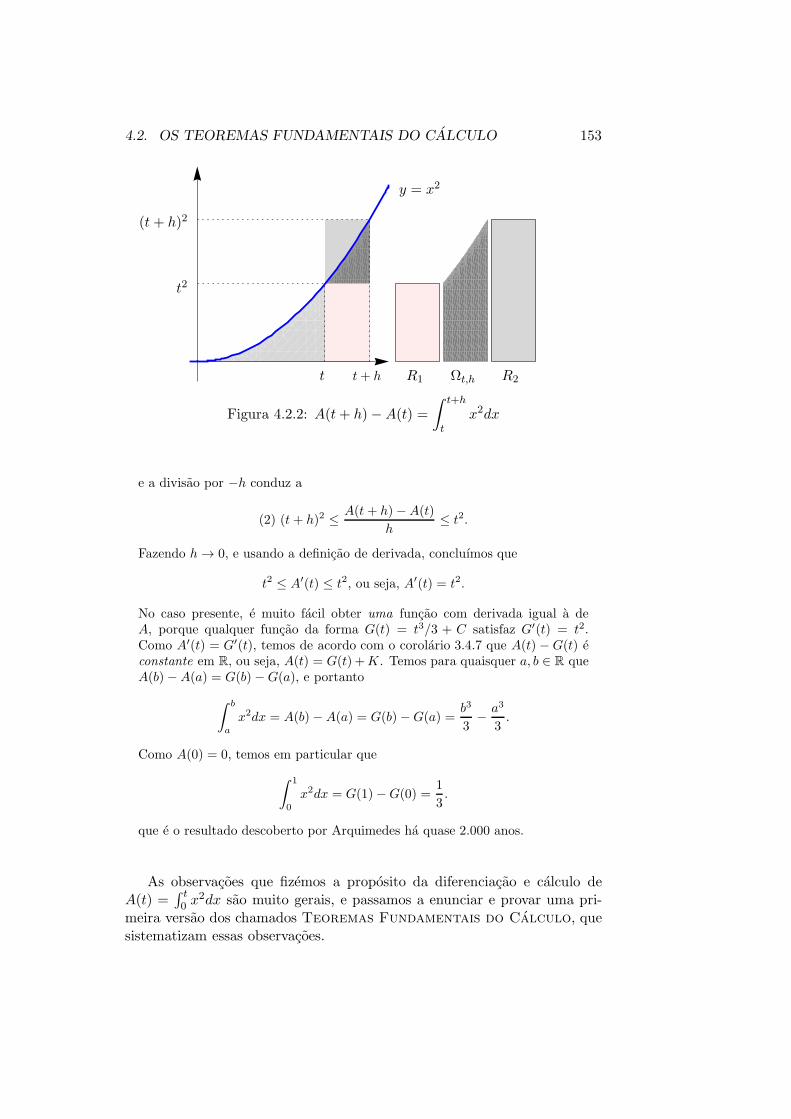
(2) Sempre considerando o integral indefinido indicado em (1), comecamos pornotar que a a diferenca A(t + h) − A(t) e a area sob a curva y = x2 no

152 CAPITULO 4. INTEGRAIS
t
t2
(t+ h)2
t+ h
y = x2
Figura 4.2.1: A(t+ h)−A(t) =
∫ t+h
t
x2dx
intervalo [t, t + h] quando h > 0 (ver figura 4.2.1)(4). Mais precisamente, eindependentemente do sinal algebrico de h, temos do corolario 4.1.3 que
A(t+ h)−A(t) =
∫ t+h
t
x2dx
Retomando a suposicao h > 0, a diferenca A(t + h)− A(t) =∫ t+h
tx2dx pode
ser estimada muito facilmente, por comparacao com os rectangulos R1 e R2
indicados na figura 4.2.2, que sao dados por
• O rectangulo R1 = (x, y) : t ≤ x ≤ t + h e 0 < y < t2, com base h ealtura t2, e Area(R1) = h · t2, e
• O rectangulo R2 = (x, y) : t ≤ x ≤ t+ h e 0 < y < (t + h)2, com baseh e altura (t+ h)2, donde Area(R2) = h · (t+ h)2.
Temos Area(R1) ≤Area(Ω) ≤Area(R1), porque t2 ≤ x2 ≤ (t+ h)2 quandot ≤ x ≤ t+ h, ou seja, e agora de acordo com o teorema 4.1.4,
h · t2 ≤ A(t+ h)−A(t) ≤ h · (t+ h)2
Dividindo estas desigualdades por h obtemos entao
(1) t2 ≤ A(t+ h)−A(t)
h≤ (t+ h)2.
Quando h < 0, a aplicacao de 4.1.4 conduz a
−h · (t+ h)2 ≤ A(t)−A(t+ h) ≤ −h · t2,4A interpretacao geometrica e mais simples para h > 0, mas e facil ver que esta restricao
e superflua para o resultado em causa.
4.2. OS TEOREMAS FUNDAMENTAIS DO CALCULO 153
t
t2
R1 R2Ωt,h
(t+ h)2
t+ h
y = x2
Figura 4.2.2: A(t+ h)−A(t) =
∫ t+h
t
x2dx
e a divisao por −h conduz a
(2) (t+ h)2 ≤ A(t+ h)−A(t)
h≤ t2.
Fazendo h → 0, e usando a definicao de derivada, concluımos que
t2 ≤ A′(t) ≤ t2, ou seja, A′(t) = t2.
No caso presente, e muito facil obter uma funcao com derivada igual a deA, porque qualquer funcao da forma G(t) = t3/3 + C satisfaz G′(t) = t2.Como A′(t) = G′(t), temos de acordo com o corolario 3.4.7 que A(t) −G(t) econstante em R, ou seja, A(t) = G(t) +K. Temos para quaisquer a, b ∈ R queA(b)−A(a) = G(b)−G(a), e portanto
∫
b
a
x2dx = A(b)−A(a) = G(b)−G(a) =b3
3− a3
3.
Como A(0) = 0, temos em particular que
∫ 1
0
x2dx = G(1)−G(0) =1
3.
que e o resultado descoberto por Arquimedes ha quase 2.000 anos.
As observacoes que fizemos a proposito da diferenciacao e calculo deA(t) =
∫ t
0x2dx sao muito gerais, e passamos a enunciar e provar uma pri-
meira versao dos chamados Teoremas Fundamentais do Calculo, quesistematizam essas observacoes.

154 CAPITULO 4. INTEGRAIS
Teorema 4.2.2 (1o Teorema Fundamental, Versao 1). Se f e contınua nointervalo I e a ∈ I entao
A(x) =
∫ x
a
f para x ∈ I =⇒ A′(x) = f(x) para qualquer x ∈ I.
Demonstracao. Consideramos apenas o caso em que x ∈ I nao e o extremodireito do intervalo I e h > 0. Como f e contınua em [x, x+h], tem maximoMh e mınimo mh no referido intervalo, e existem xh, x
′
h ∈ [x, x+h] tais quemh = f(xh) e Mh = f(x′h). Notamos do teorema 4.1.4 que
f(xh) = mh ≤ A(x+ h)−A(x)
h≤ Mh = f(x′h)
Como f e contınua em x, e claro que f(xh) → f(x) e f(x′h) → f(x) quando
h → 0, e concluımos que A′
d(x) = f(x). E facil completar este argumentopara verificar que A′(x) = f(x) para qualquer x ∈ I.
Teorema 4.2.3 (2o Teorema Fundamental/Regra de Barrow, Versao 1). Sef e contınua em I e G′(x) = f(x) para qualquer x ∈ I, entao temos paraquaisquer a, b ∈ I que
∫ b
a
f(x)dx =
∫ b
a
G′(x)dx = G(b)−G(a).
Demonstracao. De acordo com 4.2.2, se A(x) =∫ x
af entao A′(x) = f(x), e
portanto a diferenca A(x)−G(x) e constante no intervalo I. Temos portanto
∫ b
a
f(x)dx = A(b)−A(a) = G(b)−G(a)
Observacoes 4.2.4.
(1) O 1o Teorema Fundamental descreve a diferenciacao de um integral, en-quanto que o 2o Teorema Fundamental descreve a integracao de uma derivada.A figura seguinte ilustra esta ideia para o caso dos resultados enunciados acima,mas existem a este respeito teoremas muito mais gerais, que largamente ultra-passam o ambito deste texto.
(2) O 2o Teorema Fundamental, tambem conhecido por “Regra de Barrow”, eefectivamente um potente algoritmo de calculo de integrais. Mostra que, pelomenos quando a funcao integranda f e contınua, o calculo do seu integral seresume essencialmente a determinar uma funcao G tal que G′ = f na regiao deintegracao. As diferencas da forma G(b)−G(a) que aparecem no seu enunciadosao alias normalmente abreviadas como se segue:
G(b)−G(a) = G(x)|x=b
x=a= G(x)|b
a

4.2. OS TEOREMAS FUNDAMENTAIS DO CALCULO 155
Diferenciacao
Integracao
C(I)C1(I)
Figura 4.2.3: Os Teoremas Fundamentais do Calculo (4.2.2 e 4.2.3)
(3) QuandoG′(x) = f(x) para qualquer x ∈ D, dizemos queG e uma primitivade f (no conjunto D), e que f e primitivavel em D. O processo de calculode G a partir de f e o inverso da usual operacao de diferenciacao, e diz-seprimitivacao. Para dizer que G e uma primitiva de f podemos escreverapenas que G′(x) = f(x), mas e uma pratica comum que seguiremos comfrequencia escrever
G(x) =
∫
f(x)dx
(4) A Regra de Barrow mostra que a integracao de uma funcao contınua sereduz a sua primitivacao, mas nao se pode concluir daqui que qualquer funcaof primitivavel e tambem integravel. Nao e simples verificar ja este facto, mas afuncao f(x) = g′(x), onde g e o exemplo 3.1.12.3, e evidentemente primitivavelem R, porque g e uma sua primitiva, e nao e integravel em qualquer intervaloque contenha a origem(5). O 2o Teorema Fundamental nao e aplicavel a fporque o respectivo integral simplesmente nao existe.
Exemplos 4.2.5.
(1) Como (− cosx)′ = senx, que e contınua, temos
∫
π
0
senx dx = − cosx|π0= − cosπ + cos 0 = 2
(2) O integral que referimos a proposito da figura 4.1.2 e
∫ 3π
2
π
4
senx dx = − cosx|3π
2π
4
= − cos3π
2+ cos
π
4= cos
π
4=
√2
2
(3) O resultado de Arquimedes para a area do sector da parabola pode sergeneralizado para
∫ 1
0
xn dx =xn+1
n+ 1
∣
∣
∣
∣
1
0
=1
n+ 1
5O grafico da funcao f esta esbocado na figura 3.3.1

156 CAPITULO 4. INTEGRAIS
(4) Para calcular a derivada de
A(x) =
∫
ex
x2
1
2 + sen tdt
nao e necessario determinar uma primitiva de f(t) = 1
2+sen t. Basta notar que,
se G e uma qualquer primitiva de f , ou seja, se G′ = f , temos
A(x) = G(ex)−G(x2) donde A′(x) = G′(ex)ex −G′(x2)2x, i.e.,
A′(x) =ex
2 + sen(ex)− 2x
2 + sen(x2)
4.3 Tecnicas de Primitivacao
Como vimos na seccao anterior, o calculo de integrais esta directamenterelacionado com o calculo de primitivas e convencionamos que
F (x) =
∫
f(x) dx em I ⇐⇒ F ′(x) = f(x), para qualquer x ∈ I.
Recordamos que se I e um intervalo e F e uma dada primitiva de f em Ientao qualquer outra primitiva G de f em I difere de F por uma constante,ou seja,
G(x) =
∫
f(x) dx em I ⇐⇒ G(x) = F (x) + C, para qualquer x ∈ I.
Deve ser claro que todas as regras de diferenciacao que estudamos ate aquisao tambem regras de primitivacao. Os exemplos seguintes, de primitivasimediatas, ilustram isto mesmo.
Exemplos 4.3.1.
(1) F (x) =
∫
ex dx em R ⇐⇒ F (x) = ex + C
(2) F (x) =
∫
senx dx em R ⇐⇒ F (x) = − cosx+ C
(3) F (x) =
∫
cosx dx em R ⇐⇒ F (x) = senx+ C
(4) F (x) =
∫
xn dx em R ⇐⇒ F (x) =xn+1
n+ 1+ C
(5) F (x) =
∫
1
1 + x2em R ⇐⇒ F (x) = arctanx+ C
Quando o domınio em causa nao e a recta real, pode ser restrito a um inter-valo, como no exemplo seguinte, mas pode ser mais complexo. Repare-se queno exemplo (7) existem duas constantes arbitrarias, uma para cada um dosintervalos disjuntos em que se decompoe o domınio, e no exemplo (8) existeuma infinidade de constantes arbitrarias.

4.3. TECNICAS DE PRIMITIVACAO 157
(6) Quando I =]− π/2, π/2[,
F (x) =
∫
sec2 x dx em I ⇐⇒ F (x) = tanx+ C em I .
(7) F (x) =
∫
1/x dx em R \ 0 ⇐⇒
F (x) =
log |x|+ C1, para x > 0 elog |x|+ C2, para x < 0.
(8) Retomando o exemplo (6), o domınio da funcao sec2 x e D = x ∈ R :cosx 6= 0. Como cosx = 0 se e so se x = π/2 + nπ, com n ∈ Z, segue-seque D = R\E, onde E = π/2 + nπ, n ∈ Z. Em cada intervalo da formaIn =]nπ + π/2, nπ − π/2[, qualquer primitiva de sec2 x e da forma F (x) =tanx+Cn, como vimos em (6). Segue-se que as primitivas de sec2 x em D saoda forma
F (x) = tanx+ Cn, para x ∈ In.
A identificacao de uma primitiva especıfica envolve assim a seleccao das cons-tante Cn, obviamente em numero infinito.
Deve reconhecer-se que, em geral, o problema da primitivacao podeser tecnicamente muito difıcil. Por exemplo, e apesar de nao demonstrar-mos aqui esse facto, existem funcoes “elementares”, como f(x) = e−x2
oug(x) = (senx)/x, cujas primitivas nao podem ser expressas como com-binacoes algebricas simples de outras funcoes conhecidas, e sao por issosimplesmente novas funcoes, a juntar as que ja referimos.
Exemplos 4.3.2.
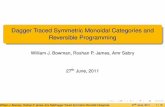
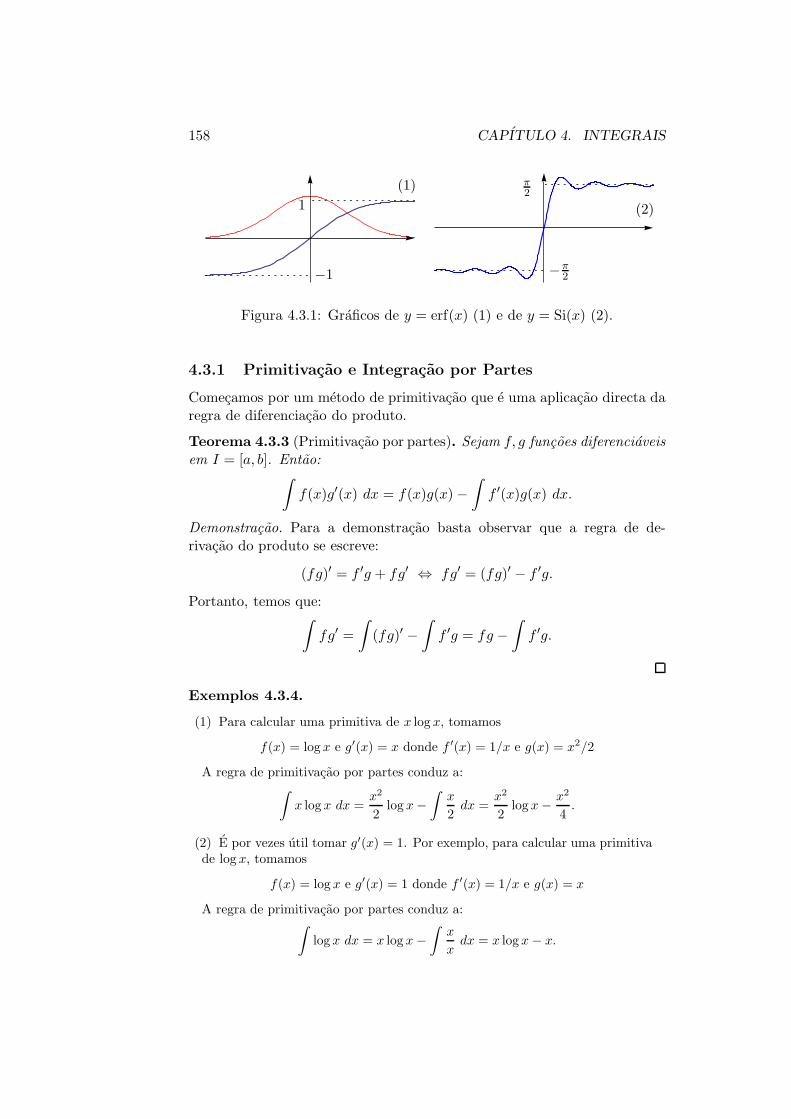
(1) O seguinte integral indefinido diz-se a funcao de erro e designa-se erf. Temum papel fundamental na Estatıstica, pela sua relacao com a famosa distri-buicao “em sino” de Gauss
erf(x) =2√π
∫
x
0
e−t2
dt
(2) O seguinte integral indefinido diz-se o Seno Integral e designa-se por Si
Si(x) =
∫
x
0
sen t
tdt
Veremos no proximo capıtulo como calcular estas funcoes com precisao arbi-trariamente grande. Os graficos destas funcoes estao na figura 4.3.1.
Existem no entanto multiplas tecnicas auxiliares de calculo de primiti-vas, que passamos a estudar, e que nos permitem primitivar, por processosrelativamente simples, uma grande variedade de funcoes.
158 CAPITULO 4. INTEGRAIS
−1
1
(1)
−π2
π2
(2)
Figura 4.3.1: Graficos de y = erf(x) (1) e de y = Si(x) (2).
4.3.1 Primitivacao e Integracao por Partes
Comecamos por um metodo de primitivacao que e uma aplicacao directa daregra de diferenciacao do produto.
Teorema 4.3.3 (Primitivacao por partes). Sejam f, g funcoes diferenciaveisem I = [a, b]. Entao:
∫
f(x)g′(x) dx = f(x)g(x)−∫
f ′(x)g(x) dx.
Demonstracao. Para a demonstracao basta observar que a regra de de-rivacao do produto se escreve:
(fg)′ = f ′g + fg′ ⇔ fg′ = (fg)′ − f ′g.
Portanto, temos que:∫
fg′ =
∫
(fg)′ −∫
f ′g = fg −∫
f ′g.
Exemplos 4.3.4.
(1) Para calcular uma primitiva de x log x, tomamos
f(x) = log x e g′(x) = x donde f ′(x) = 1/x e g(x) = x2/2
A regra de primitivacao por partes conduz a:∫
x log x dx =x2
2log x−
∫
x
2dx =
x2
2log x− x2
4.
(2) E por vezes util tomar g′(x) = 1. Por exemplo, para calcular uma primitivade log x, tomamos
f(x) = log x e g′(x) = 1 donde f ′(x) = 1/x e g(x) = x
A regra de primitivacao por partes conduz a:∫
log x dx = x log x−∫
x
xdx = x log x− x.
4.3. TECNICAS DE PRIMITIVACAO 159
(3) Pode ser necessario aplicar repetidamente o metodo de primitivacao porpartes ate atingir a primitiva pretendida. Para calcular uma primitiva dex2ex, tomamos
f(x) = x2 e g′(x) = ex donde f ′(x) = 2x e g(x) = ex
A regra de primitivacao por partes conduz a:
(i)
∫
x2ex dx = x2ex − 2
∫
xex dx.
Para calcular uma primitiva de xex, tomamos
f(x) = x e g′(x) = ex donde f ′(x) = 1 e g(x) = ex
A regra de primitivacao por partes conduz a:
(ii)
∫
xex dx = xex −∫
ex dx = xex − ex.
Por simples substituicao do resultado em (ii) na identidade (i), obtemos entao
∫
x2ex dx = x2ex − 2
∫
xex dx = x2ex − 2(xex − ex).
(4) A aplicacao do metodo de primitivacao por partes pode conduzir a primitivainicial, mas mesmo nesse caso e possıvel terminar o calculo. Para calcular umaprimitiva de ex cosx, tomamos
f(x) = ex e g′(x) = cosx donde f ′(x) = ex e g(x) = senx
A regra de primitivacao por partes conduz a:
(i)
∫
ex cosx dx = ex senx−∫
ex senx dx.
Para calcular uma primitiva de ex senx, tomamos
f(x) = ex e g′(x) = senx donde f ′(x) = ex e g(x) = − cosx
A regra de primitivacao por partes conduz a:
(ii)
∫
ex senx dx = ex cosx−∫
ex cosx dx.
A substituicao do resultado em (ii) na identidade (i) conduz agora a
∫
ex cosx dx = ex senx− (ex cosx−∫
ex cosx dx), ou
∫
ex cosx dx =1
2ex senx− 1
2ex cosx

160 CAPITULO 4. INTEGRAIS
4.3.2 Primitivacao por Substituicao
Um outro metodo muito util no calculo de primitivas e a seguinte aplicacaodirecta da regra de diferenciacao da funcao composta:
Teorema 4.3.5 (Primitivacao por substituicao). Se f e g sao funcoes di-ferenciaveis, entao:
F (u) =
∫
f(u)du =⇒ F (u(x)) =
∫
f(g(x))g′(x) dx.
Este resultado escreve-se usualmente de forma mais sucinta, mas impre-cisa, porque deixa subentendida a substituicao de u por u(x), como
∫
f(u)du =
∫
f(g(x))g′(x) dx
Demonstracao. Para a demonstracao basta observar que se F e uma primi-tiva de f , entao, pela regra de derivacao da funcao composta:
(F g)′ = (F ′ g) g′ = (f g) g′
O metodo de primitivacao por substituicao tem portanto tres passos:∫
f ′(g(x))g′(x) dx
∫
f ′(u) du f(u)
f(g(x))
u = g(x)
du = g′(x)dx
u = g(x)(1)
(2)
(3)
Figura 4.3.2: O metodo de substituicao.
(1) Substituir no integral original g(x) por u e g′(x) dx por du. Depoisdesta manipulacao, so a variavel u deve aparecer;
(2) Encontrar uma primitiva da funcao resultante (em que a variavel e u);
(3) Substituir de volta u por g(x).
Os proximos exemplos ilustram este metodo.
Exemplos 4.3.6.

4.3. TECNICAS DE PRIMITIVACAO 161
(1) Tomamos u = senx e du = cosxdx, para obter
∫
sin5 x cosx dx =
∫
u5 du =u6
6=
sin6 x
6.
(2) Tomamos u = log x e du = 1
xdx, para obter
∫
1
x log xdx =
∫
1
udu = log u = log(log x).
(3) Nos exemplos acima e relativamente simples identificar a substituicao ne-cessaria. Em geral, no entanto, essa e a principal dificuldade na aplicacao datecnica. Para calcular
∫
√
1− x2 dx,
recordamos a identidade√
1− sin2 u = cosu, que sugere a substituicao x =sinu, com dx = cosudu. Temos entao
∫
√
1− x2 dx =
∫
cos2 u du =
∫
1 + cos(2u)
2du =
=u
2+
sen(2u)
4=
u
2+
2 sen(u) cos(u)
4=
arcsenx
2+
x√1− x2
4
Note-se a tıtulo de curiosidade que a classica formula sobre a area do cırculo e
∫ 1
−1
√
1− x2 dx =arcsenx
2+
x√1− x2
4
∣
∣
∣
∣
∣
1
−1
=π
2
4.3.3 Primitivacao de Funcoes Racionais
Recorde-se que uma funcao racional e um quociente de polinomios, ou seja,f e racional se e so se
(1) f(x) =p(x)
q(x)=
anxn + an−1x
n−1 + · · · + a0bmxm + bm−1xm−1 + · · ·+ b0
,
A funcao diz-se propria se e so se o grau do numerador e menor do queo grau do denominador. Podemos sempre assumir an = bm = 1, e nessecaso a funcao e propria se e so se n < m. Se a funcao nao e propria, diz-seimpropria, mas existem polinomios d(x) e r(x) tais que p(x) = d(x)q(x) +r(x), onde o grau de r(x) e menor do que o de q(x), que sao calculados como usual algoritmo de divisao de polinomios. Temos entao:
f(x) =p(x)
q(x)=
d(x)q(x) + r(x)
q(x)= d(x) +
r(x)
q(x), e
r(x)
q(x)e propria.
Exemplo 4.3.7.
162 CAPITULO 4. INTEGRAIS
Consideramos a funcao racional:
f(x) =x4 − 4x2 + 3x− 4
x2 + 1
Esta funcao e impropria, porque o grau do numerador e 4 e o do denominadore 2. A divisao de x4 − 4x2 + 3x− 4 por x2 + 1 conduz a identidade
x4 − 4x2 + 3x− 4 = (x2 − 5)(x2 + 1) + 3x+ 1.
Obtemos assim
f(x) =x4 − 4x2 + 3x− 4
x2 + 1= x2 − 5 +
3x+ 1
x2 + 1.
A tecnica de primitivacao de funcoes racionais que apresentamos nestaseccao envolve a decomposicao dessas funcoes em somas de funcoes de umtipo especial, ditas fraccoes parciais, e a primitivacao dessas fraccoes,que como veremos conduz sempre a funcoes ja conhecidas. Na pratica, estatecnica envolve os seguintes passos:
(1) Se necessario, a reducao da funcao a uma soma de um polinomio comuma funcao propria, por utilizacao do algoritmo de divisao.
(2) A factorizacao do denominador da funcao propria num produto defactores irredutıveis.
(3) A determinacao e calculo das fraccoes parciais que constituem a ne-cessaria decomposicao, e que sao no maximo uma por cada factorirredutıvel do denominador.
(4) A primitivacao de cada uma das fraccoes parciais obtidas.
Todos estes passos sao sempre possıveis, com a excepcao de (2). Naverdade, nao conhecemos algoritmos que permitam a factorizacao completade polinomios arbitrarios, e portanto o metodo que apresentamos nao e deaplicacao universal, o que nao lhe reduz a importancia pratica.
Recorde-se tambem que os factores irredutıveis de um polinomio comcoeficientes reais sao apenas do 1o grau, i.e., da forma x−α, ou do 2o grau,da forma ax2+ bx+ c, mas com b2− 4ac < 0, onde alias podemos supor quea = 1. Estes factores podem naturalmente ser repetidos, ou seja, apareceremna forma
(x− α)n ou (x2 + bx+ c)m
Os expoentes n e m dizem-se a multiplicidade dos correspondentes factores.A existencia de uma tal factorizacao para estes polinomios e o Teorema Fun-damental da Algebra, que nao demonstramos, e que e usualmente estudadona Analise Complexa.

4.3. TECNICAS DE PRIMITIVACAO 163
Exemplos 4.3.8.
(1) x2 − 1 = (x− 1)(x+ 1) e um produto de factores do 1o grau distintos.
(2) x3 − 1 = (x− 1)(x2 + x+1) tem dois factores irredutıveis distintos, um dosquais quadratico.
(3) x4−1 = (x2−1)(x2+1) = (x−1)(x+1)(x2+1) e um produto de 3 factoresdistintos irredutıveis, um dos quais quadratico.
(4) x4+4 = x4+4x2+4−4x2 =(
(
x2 + 2)2 − 4x2
)
= (x2+2+2x)(x2+2−2x)
e um produto de 2 factores distintos quadraticos irredutıveis.
(5) A factorizacao de(
x4 − 1)2
(x3 − 1)(x2 + 1) em factores irredutıveis e:
(
x4 − 1)2
(x3 − 1)(x2 + 1) = (x− 1)3(x+ 1)2(
x2 + 1)2
(x2 + x+ 1)
Dada uma funcao racional propria, da forma f(x) = p(x)/q(x), e co-nhecidos os factores irredutıveis do seu denominador q(x), que designa-mos aqui q1(x), · · · , qk(x), e as respectivas multiplicidades, que designamosn1, · · · , nk, ou seja, supondo que
q(x) = c · q1(x)n1 · q2(x)n2 · · · qk(x)nk ,
onde c ∈ R, os factores qi(x) sao todos distintos, e cada um e da formaqi(x) = x−αi, com αi ∈ R, ou da forma qi(x) = x2+ bix+ ci, com bi, ci ∈ R
e b2i − 4ci < 0, a decomposicao de f em fraccoes parciais e uma soma defraccoes do seguinte tipo:
• Por cada factor (x− α)n :
n∑
i=1
Ai
(x− α)i, Ai ∈ R
• Por cada factor (x2 + bx+ c)m :
m∑
i=1
Bix+Ci
(x2 + bx+ c)i, Bi, Ci ∈ R
Ilustramos a aplicacao deste resultado com base nos exemplos acima,supondo sempre que a funcao em causa e propria.
Exemplos 4.3.9.
(1)ax+ b
x2 − 1=
A
x− 1+
B
x+ 1.
(2)ax3 + bx2 + cx+ d
(x− 1)(x3 − 1)=
ax3 + bx2 + cx+ d
(x− 1)2(x2 + x+ 1)=
A
x− 1+
B
(x− 1)2+
Cx+D
x2 + x+ 1.
(3)ax3 + bx2 + cx+ d
x4 − 1=
A
x− 1+
B
x+ 1+
Cx+D
x2 + 1.
(4)ax3 + bx2 + cx+ d
x4 + 4=
Ax+B
x2 + 2 + 2x+
Cx+D
x2 + 2− 2x.

164 CAPITULO 4. INTEGRAIS
(5) Se p(x) e um qualquer polinomio de grau ≤ 13, entao
p(x)
(x4 − 1)2(x3 − 1)(x2 + 1)
=A1
x− 1+
A2
(x − 1)2+
A3
(x− 1)3+
+B1
x+ 1+
B2
(x+ 1)2+
+C1x+D1
x2 + 1+
C2x+D2
(x2 + 1)2+
+Ex+ F
x2 + x+ 1.
Subjacente as identidades acima esta a afirmacao da existencia das cons-tantes referidas no lado direito das identidades, para qualquer escolha doscoeficientes do polinomio p(x), que e o numerador da funcao racional. Essaexistencia e outro resultado algebrico que nao demonstramos, e que curio-samente e mais uma vez facilmente demonstrado com recurso a tecnicas daAnalise Complexa. Em cada caso concreto, a determinacao dessas constan-tes e sempre possıvel, mas pode ser bastante trabalhosa, e e um passo crucialna aplicacao do metodo. Limitamo-nos aqui a ilustrar diversas possibilida-des de calculo sempre baseados nos exemplos acima, e particularizando onumerador. Em cada caso, o calculo comeca pela multiplicacao pelo deno-minador da funcao racional a esquerda
Exemplos 4.3.10.
(1) Tomamos p(x) = x+ 3 e comecamos por notar que
x+ 3
x2 − 1=
A
x− 1+
B
x+ 1=⇒ x+ 3 = A(x + 1) +B(x− 1).
A identidade obtida e valida para qualquer x ∈ R, e portanto
x x+ 3 A(x+ 1) B(x− 1) A(x + 1) +B(x− 1)
1 4 2A 0 2A−1 2 0 −2B −2B
Concluımos que 2A = 4 e −2B = 2, i.e., A = 2, B = −1 e
x+ 3
x2 − 1=
2
x− 1− 1
x+ 1.
(2) Tomamos p(x) = 5x2 + 3 e observamos que
5x2 + 3
(x− 1)(x2 − 1)=
A
x− 1+
B
(x− 1)2+
C
x+ 1=⇒
=⇒ 5x2 + 3 = A(x2 − 1) +B(x+ 1) + C(x − 1)2.

4.3. TECNICAS DE PRIMITIVACAO 165
Usamos aqui uma tecnica distinta da usada no exemplo anterior, porque temosapenas duas raızes (x = 1 e x = −1) e tres constantes a determinar. Numcaso como este, pode ser mais expedito igualar os coeficientes dos polinomiosna identidade anterior. Um calculo elementar conduz a
A(x2 − 1) +B(x+ 1) + C(x − 1)2 = (A+ C)x2 + (B − 2C)x+ (B −A+ C)
Temos portanto
5x2 + 3 = (A+ C)x2 + (B − 2C)x+ (B −A+ C),
e segue-se, igualando os coeficientes, que:
5 = A+ C0 = B − 2C3 = B −A+ C
, com solucao A = 3, B = 4 e C = 2.
Temos assim5x2 + 3
(x− 1)(x2 − 1)=
3
x− 1+
4
(x − 1)2+
2
x+ 1.
(3) Tomamos p(x) = x3 + x2 − x+ 3 e observamos que
x3 + x2 − x+ 3
x4 − 1=
A
x− 1+
B
x+ 1+
Cx+D
x2 + 1=⇒
x3+x2−x+3 = A(x+1)(x2+1)+B(x− 1)(x2+1)+(Cx+D)(x− 1)(x+1).
Podemos usar qualquer uma das tecnicas que ja ilustramos, e repetimos ometodo usado com o exemplo (1) mas agora incluindo a raız complexa x = ido polinomio x2 + 1. Para simplificar o quadro respectivo, escrevemos
• p(x) = x3 + x2 − x+ 3,
• m1(x) = A(x+ 1)(x2 + 1),
• m2(x) = B(x− 1)(x2 + 1)),
• m3(x) = (Cx+D)(x − 1)(x+ 1) = (Cx +D)(x2 − 1) e
• m(x) = A(x + 1)(x2 + 1) +B(x − 1)(x2 + 1)) + (Cx +D)(x2 − 1).
x p(x) m1(x) m2(x) m3(x) m(x)
1 4 4A 0 0 4A−1 4 0 −4B 0 −4Bi 2− 2i 0 0 −2(Ci+D) −2(Ci+D)
Temos entao 4A = 4 = −4B e −2(Ci+D) = 2− 2i, ou seja, A = 1, B = −1,C = 1 e D = −1, donde
x3 + x2 − x+ 3
x4 − 1=
1
x− 1− 1
x+ 1+
x− 1
x2 + 1

166 CAPITULO 4. INTEGRAIS
Vimos que e possıvel exprimir qualquer funcao racional propria comouma soma de fraccoes parciais dos tipos referidos, ou seja,
A
(x− α)nou
Bx+ C
(x2 + bx+ c)n, com b2 − 4c < 0.
A primitivacao de funcoes racionais reduz-se portanto ao calculo de primi-tivas dos seguintes tipos:
(1)
∫
dx
(x− α)n, (2)
∫
xdx
(x2 + bx+ c)ne (3)
∫
dx
(x2 + bx+ c)n.
Mostramos a seguir que estas primitivas sao essencialmente imediatas, comexcepcao das que envolvem expressoes do tipo (3) com n > 1 que, sendoelementares, sao tambem mais trabalhosas.
Para calcular
∫
dx
(x− α)n, tomamos u = x− α, du = dx:
(a) Para n = 1,
∫
dx
x− α=
∫
du
u= log |u| = log |x− α|.
(b) Para n > 1,
∫
dx
(x− α)n=
∫
du
un= − 1
(n− 1)un−1, i.e.,
∫
dx
(x− α)n= − 1
(n− 1)(x − α)n−1, se n > 1
Limitamo-nos a ilustrar os calculos necessarios a primitivacao das fraccoesde tipo (2) e (3) com alguns exemplos:
Exemplos 4.3.11.
(1)
∫
dx
x2 + 1= arctanx.
(2)
∫
xdx
x2 + 1=
1
2
∫
2xdx
x2 + 1=
1
2
∫
du
u=
1
2log u =
1
2log(x2 + 1).
(3)
∫
xdx
(x2 + 1)2=
1
2
∫
2xdx
(x2 + 1)2=
1
2
∫
du
u2= −1
2
1
u= − 1
2(x2 + 1).
(4) Para calcular um integral da forma∫
dx
(x2 + 1)2,
usamos primitivacao por partes para obter
∫
1 · dxx2 + 1
=x
x2 + 1+
∫
2x2dx
(x2 + 1)2=
x
x2 + 1+
∫
(2x2 + 2− 2)
(x2 + 1)2
dx, ou seja,
arctanx =x
x2 + 1+ 2
∫
(x2 + 1)
(x2 + 1)2dx− 2
∫
dx
(x2 + 1)2, ou ainda

4.3. TECNICAS DE PRIMITIVACAO 167
2
∫
dx
(x2 + 1)2= − arctanx+
x
x2 + 1+ 2
∫
dx
x2 + 1= arctanx+
x
x2 + 1
Concluımos finalmente que
∫
dx
(x2 + 1)2=
1
2arctanx+
x
2(x2 + 1)
(5) A tecnica usada em (4) permite sempre reduzir o calculo de
∫
dx
(x2 + 1)n+1
ao calculo do correspondente integral para n:
∫
1 · dx(x2 + 1)
n =x
(x2 + 1)n+
∫
2nx2dx
(x2 + 1)n+1
=x
(x2 + 1)n+
∫
(2nx2 + 2n− 2n)
(x2 + 1)n+1
dx =
=x
(x2 + 1)n+ 2n
∫
dx
(x2 + 1)n− 2n
∫
dx
(x2 + 1)n+1
, ou ainda
2n
∫
dx
(x2 + 1)n+1
=x
(x2 + 1)n + (2n− 1)
∫
dx
(x2 + 1)n
Concluımos finalmente que
∫
dx
(x2 + 1)n+1
=x
2n (x2 + 1)n +
2n− 1
2n
∫
dx
(x2 + 1)n
(6) Usando a tecnica em (5) e o resultado em (4) podemos calcular
∫
dx
(x2 + 1)3=
x
4 (x2 + 1)2+
3
4
∫
dx
(x2 + 1)2, i.e.,
∫
dx
(x2 + 1)3=
x
4 (x2 + 1)2+
3
8arctanx+
3x
8(x2 + 1)
Os exemplos 4.3.11 recorrem todos ao polinomio quadratico irredutıvelx2 + 1. No caso mais geral em que p(x) = x2 + bx + c, e por vezes util“completar o quadrado”, ou seja, escrever p(x) = (x−α)2+β2, onde α± iβsao as raızes complexas de p(x), o que se resume a fazer
x2 + bx+ c = x2 + bx+b2
4+ c− b2
4=
(
x+b
2
)2
+
(
4c− b2
4
)
=
= (x− α)2 + β2 onde α =b
2e β =
√4c− b2
2.
A primitivacao de fraccoes parciais com denominador (x− α)2 + β2 e intei-ramente analoga a que vimos nos exemplos acima, e pode ser feita usandoas substituicoes x− α = βu ou v = x2 + bx+ c, dependendo dos casos.

168 CAPITULO 4. INTEGRAIS
Exemplos 4.3.12.
(1) Calculamos
∫
dx
x2 + 2x+ 5=
∫
dx
(x+ 1)2 + 4com x+ 1 = 2u, dx = 2du:
∫
dx
(x+ 1)2 + 4=
∫
2du
4u2 + 4=
1
2
∫
du
u2 + 1=
1
2arctanu =
1
2arctan(
x+ 1
2)
(2) A substituicao em (1) e apropriada para qualquer primitiva do tipo
∫
1
(x2 + 2x+ 5)n dx =
∫
1
((x+ 1)2 + 4)n dx,
porque conduz a∫
1
(x2 + 2x+ 5)ndx =
∫
1
((x+ 1)2 + 4)ndx =
1
2
∫
du
(u2 + 1)n,
e esta primitiva pode ser calculada como vimos no exemplo 4.3.11.5.
(3) As primitivas do tipo
∫
x
(x2 + 2x+ 5)n dx =
∫
x
((x + 1)2 + 4)n dx
envolvem um passo intermedio, relacionado com a substituicao v = x2+2x+5 =(x+ 1)2 + 4. Notamos que dv = 2(x+ 1)dx, e comecamos por escrever
∫
x
(x2 + 2x+ 5)n dx =
∫
x+ 1− 1
(x2 + 2x+ 5)n dx =
=
∫
x+ 1
(x2 + 2x+ 5)n dx−
∫
1
(x2 + 2x+ 5)n dx
O integral a direita e o exemplo anterior, e o integral a esquerda e calculadofazendo
∫
x+ 1
(x2 + 2x+ 5)ndx =
1
2
∫
2(x+ 1)
(x2 + 2x+ 5)ndx =
1
2
∫
dv
vn,
que tem primitivacao imediata.
(4) Retomando o exemplo 4.3.10.3, temos
∫
x3 + x2 − x+ 3
x4 − 1dx =
∫
dx
x− 1−∫
dx
x+ 1+
∫
x− 1
x2 + 1dx =
= log |x− 1| − log |x+ 1|+ 1
2
∫
2xdx
x2 + 1−∫
dx
x2 + 1dx =
= log
∣
∣
∣
∣
x− 1
x+ 1
∣
∣
∣
∣
+1
2
∫
dv
v+ arctanx = log
∣
∣
∣
∣
x− 1
x+ 1
∣
∣
∣
∣
+1
2log |v|+ arctanx =
= log
∣
∣
∣
∣
x− 1
x+ 1
∣
∣
∣
∣
+1
2log(x2 + 1) + arctanx

4.3. TECNICAS DE PRIMITIVACAO 169
4.3.4 Primitivacao de Funcoes Trigonometricas
E possıvel primitivar funcoes trigonometricas do tipo∫
sinn x cosm x dx
usando formulas trigonometricas conhecidas, como
sin2 x+ cos2 x = 1, sin2 x =1− cos 2x
2, cos2 x =
1 + cos 2x
2.
Mais uma vez limitamo-nos a ilustrar as tecnicas necessarias com exemplos.
Exemplos 4.3.13.
(1) n ou m e ımpar: Consideramos o caso
∫
sin4 x cos3 x dx. O expoentem = 3
e ımpar, e fazemos∫
sen4 x cos3 x dx =
∫
sen4 x cos2 x cos x dx =
∫
sen4 x(1− sen2 x) cos x dx
Com a substituicao u = senx, du = cosxdx, obtemos∫
sen4 x(1 − sen2 x) cos x dx =
∫
u4(1− u2)du =
∫
(u5 − u6)du =
(2) n ou m sao ambos pares: Para calcular
∫
sen4 x cos2 x dx, observamos que
∫
sen4 x cos2 x dx =
∫
(senx cosx)2 sen2 x dx =
∫(
sen 2x
2
)21− cos 2x
2dx =
=1
8
∫
sen2 2x dx− 1
8
∫
sen2 2x cos 2x dx =
=1
8
∫
1− cos 4x
2dx− 1
16
∫
v2 dv =x
16− 1
64sen 4x− 1
48v3 =
=x
16− 1
64sen 4x− 1
48sen3 2x
onde usamos (entre outras) a substituicao v = sen 2x.
As primitivas deste tipo podem ser tambem calculadas exprimindo asfuncoes senx e cos x em termos da exponencial eix, ou seja,
eix = cos x+ i sen x, cos x =eix + e−ix
2, sen x =
eix − e−ix
2i
Temos, por exemplo, e usando o binomio de Newton,
sen4 x =
(
eix − e−ix
2i
)4
=1
16
(
e4ix − 4e2ix + 6− 4e−2ix + e−4ix)
=

170 CAPITULO 4. INTEGRAIS
=1
16(cos 4x− 4 cos 2x+ 6− 4 cos(−2x) + cos(−4x)) =
=1
16(2 cos 4x− 8 cos 2x+ 6) =
1
8cos 4x− 1
2cos 2x+
3
4.
Concluımos que, e.g.,
∫
sen4 x dx =1
32sen 4x− 1
4sen 2x+
3x
4
4.3.5 Primitivacao de Funcoes Racionais de Senos e Cosenos
Uma funcao racional de duas variaveis e um quociente de polinomios igual-mente em duas variaveis. As seguintes funcoes sao deste tipo:
P (x, y) =x2y2 + xy − 2y5
x3 + 2xy2 − 3x4, Q(x, y) =
x5 − y + 4x7y3 + 2y8
y4 + 5xy3 + x8
Abordamos nesta seccao a primitivacao de funcoes da forma
(1)
∫
R(sinx, cos x) dx,
onde R e uma funcao racional de duas variaveis. A primitivacao e possıvel,porque a substituicao
u = tan(x
2
)
, x = 2arctan u, dx =2
1 + u2du.
reduz o problema em (1) a primitivacao de uma funcao racional do tipo quediscutimos na seccao 4.3.3. Observamos da figura 4.3.3 que:
sen(x
2
)
=u√
1 + u2e cos
(x
2
)
=1√
1 + u2.
x2
1
u
√ 1 +u2
Figura 4.3.3: A substituicao u = tan(
x2
)
.

4.3. TECNICAS DE PRIMITIVACAO 171
Temos assim, usando as formulas do angulo duplo,
senx = 2 sen(x
2
)
cos(x
2
)
=2u
1 + u2e
cos x = cos2(x
2
)
− sen2(x
2
)
=1
1 + u2− u2
1 + u2=
1− u2
1 + u2
Assim, a substituicao x = 2arctan u fornece:
∫
R(sinx, cos x) dx =
∫
R
(
2u
1 + u2,1− u2
1 + u2
)
· 2
1 + u2du.
Concluımos, tal como tınhamos afirmado, que esta substituicao transformauma primitiva de uma funcao racional de senos e cosenos numa primitiva deuma funcao racional usual.
Exemplos 4.3.14.
(1)
∫
secx dx =
∫
1
cosxdx =
∫
1 + u2
1− u2
2
1 + u2du =
∫
2
1− u2du =
=
∫
1
1− udu+
∫
1
1 + udu = log
∣
∣
∣
∣
1 + u
1− u
∣
∣
∣
∣
= log
∣
∣
∣
∣
∣
1 + tan(
x
2
)
1− tan(
x
2
)
∣
∣
∣
∣
∣
=
= log
∣
∣
∣
∣
∣
cos(
x
2
)
+ sen(
x
2
)
cos(
x
2
)
− sen(
x
2
)
∣
∣
∣
∣
∣
= log
∣
∣
∣
∣
∣
(
cos(
x
2
)
+ sen(
x
2
))2
(
cos(
x
2
)
− sen(
x
2
)) (
cos(
x
2
)
+ sen(
x
2
))
∣
∣
∣
∣
∣
=
log
∣
∣
∣
∣
∣
cos2(
x
2
)
+ sen2(
x
2
)
+ 2 cos(
x
2
)
sen(
x
2
)
cos2(
x
2
)
− sen2(
x
2
)
∣
∣
∣
∣
∣
= log
∣
∣
∣
∣
1 + senx
cosx
∣
∣
∣
∣
, i.e.,
∫
secx dx = log | secx+ tanx|
(2)
∫
3 dx
4 + 5 sinx=
∫
3
4 + 5 2u
1+u2
· 2
1 + u2du =
∫
3
2 + 5u
1+u2
· 1
1 + u2du =
=
∫
3
2 + 2u2 + 5udu =
∫
2
2u+ 1du−
∫
1
u+ 2du = log
∣
∣
∣
∣
2u+ 1
2 + u
∣
∣
∣
∣
=
= log
∣
∣
∣
∣
∣
2 tan(
x
2
)
+ 1
2 + tan(
x
2
)
∣
∣
∣
∣
∣
.
(3) Claro que por vezes a primitiva pode ser mais facil de calcular por outratecnica. No caso que se segue, e mais razoavel tomar u = 4 + 5 senx:
∫
3 cosx dx
4 + 5 sinx=
3
5
∫
du
udu =
3
5log |u| = 3
5log |4 + 5 sinx|