Computing Hydrodynamic Forces and Moments on a Vessel without Bernoulli’s...
11
Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships Computing Hydrodynamic Forces and Moments on a Vessel without Bernoulli’s Equation Arthur M. Reed & John G. Telste David Taylor Model Basin (NSWC/CD) ABSTRACT Traditionally the hydrodynamic force on a ship’s hull is obtained by integrating the pressure over the hull, using Bernoulli’s equation to compute the pressures. Due the need to evaluate Φ t , Φ x , Φ y , Φ z at every instant in time, this becomes a computational challenge when one wishes to know the hydrodynamic forces (and moments) on the instantaneous wetted surface of a vessel in extreme seas. A methodology that converts the integration of the pressure over the hull surface into an impulse, the time derivative of several integrals of the velocity potential over the surface of the vessel and possibly the free surface near the vessel is introduced. KEYWORDS Hydrodynamic forces; Momnetum theory; Hydrodynamic impulse INTRODUCTION Sclavounos, Telste and Reed (Sclavounos, 2011; Sclavounos, et al., 2011) have developed a non- linear slender-body model for the treatment of the potential flow problem governing the responses of a vessel in steep random waves. Boundary value problems have been derived for the disturbance ra- diation and diffraction velocity potentials relative to the ship-fixed coordinate system. The evaluation of the sectional force (and moment) distributions based on the solution of these potential flow sec- tional boundary value problems is the subject of the present paper. A sectional force method treats as unknown the sectional force distribution along the ship length as opposed to the local pressure, which is natural within a slender-body framework. Com- bined with additive viscous models, these sectional force models lead to the evaluation of the integrated forces and moments which are input to the vessel nonlinear equations of motion. BACKGROUND Traditionally, the derivation of correct sectional force distributions has played a central role in slender-body theory of aerodynamics and hydrody- namics. The direct application of Bernoulli’s equa- tion is complicated by a number of facts. The first is the need to evaluate gradients of the ve- locity potential, which may be a delicate compu- tational task within a panel method. The second is the proper treatment of the longitudinal gradients of the ambient and disturbance potentials, which may not be possible to ignore in light of the slender- ness approximations. A third fact which arises in connection with the present nonlinear time-domain slender-body theory is the proper interpretation of time derivatives with respect to the ship-fixed co- ordinate system and their careful treatment in the vicinity of the free-surface ship-hull intersection. These complications with the direct appli- cation of Bernoulli’s equation within a slender- 341
Transcript of Computing Hydrodynamic Forces and Moments on a Vessel without Bernoulli’s...

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
Computing Hydrodynamic Forces and Moments on a Vesselwithout Bernoulli’s Equation
Arthur M. Reed & John G. TelsteDavid Taylor Model Basin (NSWC/CD)
ABSTRACT
Traditionally the hydrodynamic force on a ship’s hull is obtained by integrating the pressure over the hull,using Bernoulli’s equation to compute the pressures. Due the need to evaluateΦt , Φx, Φy, Φz at every instantin time, this becomes a computational challenge when one wishes to know the hydrodynamic forces (andmoments) on the instantaneous wetted surface of a vessel in extreme seas. A methodology that converts theintegration of the pressure over the hull surface into an impulse, the time derivative of several integrals of thevelocity potential over the surface of the vessel and possibly the free surface near the vessel is introduced.
KEYWORDS
Hydrodynamic forces; Momnetum theory; Hydrodynamic impulse
INTRODUCTION
Sclavounos, Telste and Reed (Sclavounos, 2011;Sclavounos,et al., 2011) have developed a non-linear slender-body model for the treatment of thepotential flow problem governing the responses ofa vessel in steep random waves. Boundary valueproblems have been derived for the disturbance ra-diation and diffraction velocity potentials relativeto the ship-fixed coordinate system. The evaluationof the sectional force (and moment) distributionsbased on the solution of these potential flow sec-tional boundary value problems is the subject of thepresent paper. A sectional force method treats asunknown the sectional force distribution along theship length as opposed to the local pressure, whichis natural within a slender-body framework. Com-bined with additive viscous models, these sectionalforce models lead to the evaluation of the integratedforces and moments which are input to the vesselnonlinear equations of motion.
BACKGROUND
Traditionally, the derivation of correct sectionalforce distributions has played a central role inslender-body theory of aerodynamics and hydrody-namics. The direct application of Bernoulli’s equa-tion is complicated by a number of facts. Thefirst is the need to evaluate gradients of the ve-locity potential, which may be a delicate compu-tational task within a panel method. The second isthe proper treatment of the longitudinal gradients ofthe ambient and disturbance potentials, which maynot be possible to ignore in light of the slender-ness approximations. A third fact which arises inconnection with the present nonlinear time-domainslender-body theory is the proper interpretation oftime derivatives with respect to the ship-fixed co-ordinate system and their careful treatment in thevicinity of the free-surface ship-hull intersection.
These complications with the direct appli-cation of Bernoulli’s equation within a slender-
341

Proceedings of the 12th International Ship Stability Workshop
body theory are mitigated if the integrated sectionalforces are instead evaluated by the proper applica-tion of the momentum conservation theorem. Thisapproach has several merits that have been takeninto account in the development of strip theory andsubsequent linear and nonlinear slender-body the-ories. Drawing upon the work of Lighthill (1960)and Newman & Wu (1973) on the swimming ofslender fish, expressions can be derived for the sec-tional force distributions which are simple func-tions of the sectional integrals of the velocity po-tential. This important result circumvents in an el-egant and robust manner the need to interpret thelongitudinal convective terms in Bernoulli’s equa-tion. Moreover, the presence of a sectional integralof the velocity potential in the force expression sug-gest that this is the fundamental quantity needed forthe evaluation of the sectional and total forces, asopposed to the local values of the pressure or veloc-ity potential. This in turn may lead to simple—oreven analytical—expressions for the sectional forcedistributions within a slender-body framework in anumber of settings. Finally, this sectional force for-mulation allows for a simple and robust interpre-tation of time derivatives when the sectional wet-ted surface is time dependent as the vessel sectionsmove in and out of the free surface.
THE BOUNDARY VALUE PROBLEM ANDITS DECOMPOSITION
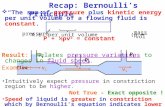
Let us assume as an earth-fixed reference a right-handed coordinate system(X,Y,Z) and a ship-fixedright-handed coordinate system (x,y,z) centered atan arbitrary pointB with the xy-plane parallel tothe calm water surfaceZ = 0 when the ship is atrest (Figure 1). The ship position in space is com-pletely defined by the rectilinear displacement vec-tor ΞΞΞB(t) = ξ1(t)iii +ξ2(t) jjj +ξ3(t)kkk from the originof the earth-fixed coordinate system to the origin ofthe ship-fixed coordinate system and the Euler an-gles defined in the order[ξ6(t),ξ5(t),ξ4(t)].
The free surface is assumed to be a single-valued function of the horizontal coordinatesX andY. Surface tension is negligible. The fluid is as-sumed to be homogeneous, incompressible, andfrictionless. The fluid flow is assumed to be irrota-
tional. These conditions are sufficient to guaranteethe existence of a velocity potential.
The Total Velocity Potential
In the fluid surrounding the ship, the total ve-locity potential isΦ. It satisfies the Laplace equa-tion
∇2Φ = 0
within the fluid domain bounded by the free-surfaceZ = ζ(X,Y, t) and the hull of the ship. The total po-tential satisfies at least a linear free-surface bound-ary condition onZ = ζ(X,Y, t).1
Hull Boundary Condition for the Total Potential
Since the hull boundary condition is derivedwith vectors defined to be independent of framesof reference or coordinate systems, the appropriateboundary condition expressed in terms of either theearth-fixed or ship-fixed frame of reference is ob-tained from the components of vector equations.
Velocity of Points on the Hull
To obtain the hull boundary condition satisfiedby Φ, we first consider a point fixed on the hull(fixed in the ship-fixed frame of reference). It hasship-fixed coordinatesx, y, zand earth-fixed coordi-natesX, Y, Z. The vectorsxxx andXXX from the originsof the ship-fixed and earth-fixed coordinate systemsto the point, respectively, satisfy the equations
XXX = Xiii+Y jjj +Zkkk
xxx= xiii +yjjj +zkkk
xxx= XXX−ΞΞΞB(t)
whereΞΞΞB(t)= ξ1iii+ξ2 jjj+ξ3kkk is the vector from theorigin of the earth-fixed coordinate system to theorigin of the ship-fixed coordinate system. Sincethe point is fixed on the hull,x, y, andz are inde-pendent of time. Consequently, the ship-fixed timederivative ofxxx vanishes. We have
000=d∗xxxdt
=dXXXdt
−dΞΞΞB
dt−ΩΩΩ×xxx
1As the free-surface boundary condition is not used in thedevelopment of the momentum theory for the force, the spe-cific free-surface boundary condition chosen is not important.
342

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
z x
yξ
4
ξ6
ξ5
Y
X
Ξ(t) = (ξ1, ξ
2, ξ
3)
y
x
B
B
z
x
Z
X
S(t)
Fig. 1 Coordinate systems for the nonlinear ship response problem.
whered∗/dt andd/dt operating on a vector obtainthe ship-fixed and earth-fixed time derivatives of thevector, respectively. The velocityvvvSHIP of the pointon the hull is then
vvvSHIP=dXXXdt
=dΞΞΞB
dt+ΩΩΩ×xxx. (1)
If the point slides along the hull surface, it isnot fixed in the ship-fixed frame of reference andd∗xxx/dt 6= 000. However, it is true thatnnn ·d∗xxx/dt = 0so that
nnn·dXXXdt
= nnn·
(dΞΞΞB
dt+ΩΩΩ×xxx
)nnn·vvvSHIP
wherevvvSHIP is the velocity of a fixed point on thehull coinciding with the position of the sliding pointat timet.
Equation for the Hull Surface
The hull surfaceSB(t) is rigid and therefore in-dependent of time in the ship-fixed frame of refer-ence. Points on the surface are those points whoseship-fixed coordinatesx, y, zsatisfy a mathematicalequation of the form
h(x,y,z) = 0.
The unit normalnnn on the hull surface is defined bythe equation
nnn=∇h|∇h|
.
The gradient points in the direction of maximumincrease ofh. For that reason it is stipulated thath(x,y,z) > 0 for points inside the hull with ship-fixed coordinatesx, y, z andh(x,y,z) < 0 for pointsoutside the hull. Thennnn is guaranteed to point intothe hull.
Hull Boundary Condition
To obtain the hull boundary condition, we nowconsider an arbitrary point with ship-fixed coordi-natesx, y, z and earth-fixed coordinatesX, Y, Z.The point moves and traces out a smooth trajectoryso that both the ship-fixed and earth-fixed coordi-nates are functions of time. The derivative ofh fol-
343

Proceedings of the 12th International Ship Stability Workshop
lowing the point is
DhDt
=∂h∂x
dxdt
+∂h∂y
dydt
+∂h∂z
dzdt
= ∇h·d∗xxxdt
= ∇h·
(dXXXdt
−dΞΞΞB
dt−ΩΩΩ×xxx
).
If the point is a fluid particle sliding along the sur-face of the hull, thenDh/Dt = 0, dXXX/dt = ∇Φ, and
0= nnn·
(∇Φ−
dΞΞΞB
dt−ΩΩΩ×xxx
).
The hull surface boundary condition requires thatthe normal velocity of a fluid particle on the hullsurface match the normal velocity of the hull:
nnn·∇Φ = nnn·
(dΞΞΞB
dt+ΩΩΩ×xxx
)nnn·vvvSHIP
wherevvvSHIP is given by (1).
Incident Wave Potential
In the absence of a body, the velocity potentialwould have been the ambient velocity potentialφI ,which satisfies the Laplace equation
∇2φI = 0
in the fluid below the free-surface elevationZ =ζI (X,Y, t).
The ambient wave velocity potentialφI is as-sumed to satisfy the same free-surface boundarycondition as the total velocity potential, but onZ =ζI (X,Y, t). It is also assumed that the incident waveelevation differs little from the total wave elevationexcept possibly near the vessel.
The Disturbance Velocity Potential
WhenζI < ζ, it is assumed thatφI can be ana-lytically continued aboveZ= ζI to define a continu-ation everywhere outside the hull in the fluid belowthe free-surface elevationZζ. Then a disturbancepotentialφD is defined everywhere in this domainaccording to the equation
φD = Φ−φI .
The difference in wave elevation between the to-tal wave elevation around the hull and the ambientwave potential that would have existed in the ab-sence of the ship isζD. It obviously satisfies theequation
ζD = ζ−ζI .
The free-surfce boundary condition for thedisturbance potential potential is derived from thatof the total velocity potential, substitutingφI + φD
andζI +ζD for Φ andζ in the total velocity poten-tial free-surface boundary condition and linearizingin φD andζD.
Hull Boundary Condition for the Disturbance Po-tential
Using the assumed decomposition of the totalpotential as the sum of the incident wave potentialand a disturbance potential, we obtain the equation
nnn·∇φDnnn·vvvSHIP−nnn·∇φI .
wherevvvSHIP is given by (1).
Boundary Condition at Infinity for the DisturbancePotential
At infinity, the velocity due to the disturbancevelocity potential approaches zero, and the free-surface waves generated by the interaction of theship with the ambient waves radiate outward. Thisis the radiation boundary condition.
THE FLUID FORCE ON THE VESSEL
The purely three-dimensional case of a vessel os-cillating in six degrees of freedom in steep ambi-ent waves is considered. The most general fullynonlinear problem is formulated first leading to thetreatment of special cases. The sectional force isevaluated first relative to the inertial frame and nextrelative to the ship-fixed coordinate system.
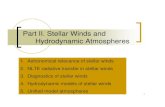
Figure 2 illustrates a 3D vessel undergoingrectilinear and rotational displacements in steepambient waves. The fully nonlinear free-surface el-evationζ(t) is the sum of the ambient wave eleva-tion and the disturbance caused by the vessel dis-placement and the corresponding total free surface
344

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
S∞
Z
Y
XX
g
n
SB(t)
nS
F(t)
z
y
SF(t)I
T
Fig. 2 Coordinate system for vessel undergoing rectilinear and rotational displacement in steep ambientwaves
is denoted bySTF(t). The nonlinear wave elevation
of the ambient wave alone isζI(t) and the corre-sponding free-surface elevation is denoted bySI
F(t).The difference between the two free-surface eleva-tions is assumed to be finite. Yet, this difference isexpected to be small, except perhaps near the water-line. This assumption is essential for the derivationof an approximate form of the three-dimensionalforce acting on the vessel using the momentum the-orem developed below. The fluid in the volumeVbounded by the wetted surfaceST
B of the hull, thefree surfaceST
F , and a control surfaceST∞ is consid-
ered:
ST = STB +ST
F +ST∞ .
The control surface is fixed with respect to theearth-fixed coordinate system. It is also boundeduntil the end when the surface is moved to infin-ity in all directions. The rate of change of the fluidmomentum in the volume is
FFFfluid = ρddt
∫∫∫
V
dV ∇Φ = ρddt
©∫∫
ST
dSΦnnn (2)
where Gauss’ theorem has been used to convert thevolume integral to a surface integral. (Here, par-tial derivatives with respect to time are earth-fixedwhere the earth-fixed coordinatesX, Y, Z of a pointin space are fixed.) According to the transport theo-rem, the rate of change of momentum is also given
by the equation
FFFfluid = ρ∫∫∫
V
dV ∇∂Φ∂t
+ρ©∫∫
ST
dSUn∇Φ
= ρ©
∫∫
ST
dS∂Φ∂t
nnn+ρ©
∫∫
ST
dSUn∇Φ
whereUn = nnn·UUU is the outward normal componentof the velocityUUU of the surfaceST . Putting theseresults together, we obtain the equation
ρddt
©∫∫
ST
dSΦnnn
= ρ©
∫∫
ST
dS∂Φ∂t
nnn+ρ©
∫∫
ST
dSUn∇Φ
= ρ©
∫∫
ST
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
+ρ©
∫∫
ST
dS
(Un∇Φ
−12
∇Φ ·∇Φnnn
)
= ρ©∫∫
ST
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
+ρ©∫∫
ST
dS
(Un−
∂Φ∂n
)∇Φ
= ρ©∫∫
ST
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
−ρ∫∫
ST∞
dS∂Φ∂n
∇Φ .
(3)
345

Proceedings of the 12th International Ship Stability Workshop
The third equality is obtained by using Newman’sidentity
©∫∫
S
dS
[∇ϕ
∂ϕ∂n
−12
∇ϕ ·∇ϕnnn
]= 0
which holds for any velocity potentialϕ within avolume enclosed by a surfaceS [Newman (1977),p. 134, Eq. 89]. The last equality in (3) is obtainedfrom the equationsUn = 0 onST
∞ andUn = ∂Φ/∂non ST
F and STB. The total fluid forceFFFTOT acting
on the body is the integral ofpnnn over the wettedsurface of the hull. Thus we obtain the equation
FFFTOT =−ρ∫∫
STB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ+gZ
)nnn
=−ρddt
©
∫∫
ST
dSΦnnn−ρ∫∫
ST∞
dS∂Φ∂n
∇Φ
−ρg∫∫
STB+ST
F
dSZnnn
+ρ∫∫
ST∞
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
(4)
for the total fluid force acting on the body. The factthat the pressure vanishes onST
F has been used toobtain this equation.
Equation (4) is an important intermediate re-sult which was derived without invoking any ap-proximations. It accomplishes one of the objectivesof the momentum formulation, namely to reducethe definition of the force by pressure integrationinto integrals that are much easier to evaluate orfurther reduce as indicated below. The superscriptT has been used to indicate surfaces for the totalnonlinear problem.
The fluid that would have existed inside thevolume bounded by the ambient wave free surfaceSI
F and the control surfaceSI∞, if the ship had not
disturbed the water, is now considered. The surfaceSI
∞ is slightly different fromST∞ only due to the dif-
ference between the ambient wave elevationζI(t)and the total nonlinear wave elevationζ(t). The to-
tal bounding surface isSI where
SI = SIF +SI
∞ .
Just as was done for the fluid in the volumeV out-side the hull below the surfaceST
F , one can considerthe rate of change of the fluid momentum inside thevolume bounded bySI . It can be obtained fromeqs. (2)–(3) by letting the hull shrink to infinites-imal size. The integrals overST
B then vanish,STF
becomesSIF andST
∞ becomesSI∞. The force acting
on the vanishingly small ship is zero and is givenby either side of the equation
000=−ρddt
©
∫∫
SI
dSφI nnn−ρ∫∫
SI∞
dS∂φI
∂n∇φI
−ρg∫∫
SIF
dSZnnn
+ρ∫∫
SI∞
dS
(∂φI
∂t+
12
∇φI ·∇φI
)nnn.
(5)
Equation (5) is subtracted from (4) to obtain theequation
FFFTOT =−ρ∫∫
STB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ+gZ
)nnn
=−ρddt
∫∫
STB
dSΦnnn−ρg∫∫
STB
dSZnnn
−ρddt
∫∫
STF
dSΦnnn−∫∫
SIF
dSφI nnn
−ρg
∫∫
STF
dSZnnn−∫∫
SIF
dSZnnn
−ρddt
∫∫
ST∞
dSΦnnn−∫∫
SI∞
dSφI nnn
346

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
−ρ
∫∫
ST∞
dS∂Φ∂n
∇Φ
−
∫∫
SI∞
dS∂φI
∂n∇φI
+ρ
∫∫
ST∞
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
−
∫∫
SI∞
dS
(∂φI
∂t
− +12
∇φI ·∇φI
)nnn
.
It is argued that the sums of the terms within the lastthree pairs of square brackets are negligibly smallwhen the control surfaces are moved infinitely faraway from the ship. The forceFFFDYN acting on thebody due to the dynamic pressure is
FFFDYN =−ρ∫∫
STB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
≃−ρddt
∫∫
STB
dSΦnnn
−ρddt
∫∫
STF
dSΦnnn−∫∫
SIE
dSφI nnn
−ρg
∫∫
STF
dSZnnn−∫∫
SIE
dSZnnn
+ρddt
∫∫
SIW
dSφI nnn+ρg∫∫
SIW
dSZnnn.
HereSIE is the portion ofSI
F that is outside the hullandSI
W is the portion ofSIF that is inside the hull:
SIF = SI
E +SIW .
The functionsφI andΦ are continued analyticallyaboutZ = ζI and Z = ζ, respectively, so that thefunction φI is defined forZ ≤ ζ and Φ is definedfor Z ≤ ζI . Then Φ may be expanded about the
ambient free-surface elevationZζI . The dynamicforce satisfies the approximation
FFFDYN =−ρ∫∫
STB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
≃−ρddt
∫∫
STB
dSΦnnn−ρddt
∫∫
SIE
dSφDnnn
−ρg∫∫
SIE
dSζDnnn+ρddt
∫∫
SIW
dSφI nnn
+ρg∫∫
SIW
dSZnnn
(6)
wherennn points into the body onSTB and upward(nnn·
kkk> 0) on SIE andSI
W.
We now follow the steps taken in consideringthe rate of change of the momentum in the fluid out-side the hull in eqs. (2)–(3). However, this time weconsider the rate of change of the momentum of thefluid inside the volume bounded by the surfaceSI
Band the ambient free surfaceSI
W that would havebeen the case if the ship had not disturbed the fluid.The surfaceSI
B is the part of the hull surface thatlies below the ambient free surfaceZ = ζI
F(t). Thebounding surfaceSINT is now the disjoint sum ofthe hull surfaceSI
B and the nonlinear waterlineSIW:
SINT = SIB+SI
W .
In this case, the velocity potential isφI . SinceUn = nnn ·UUU and∂/∂n = nnn ·∇, the final result givenby (3) is unchanged ifnnn is replaced by−nnn. Thenormal is chosen to point into the volume enclosedby SINT so that it matches the normal onST
B in pre-vious equations. In (3),Un is the same as∂φI/∂nonSI
W. After rearranging terms, the equation corre-sponding to (3) is therefore
ρ©
∫∫
SINT
dS
(∂φI
∂t+
12
∇φI ·∇φI
)nnn′
= ρ∫∫
SIB
dS
(∂φI
∂t+
12
∇φI ·∇φI
)nnn′
−ρg∫∫
SIW
dSZnnn′ =
(7)
347

Proceedings of the 12th International Ship Stability Workshop
= ρddt
©
∫∫
SINT
dSφI nnn′
+ρ∫∫
SINT
dS(∇φI ·nnn
′−UUU ·nnn′)
∇φI
= ρddt
©
∫∫
SINT
dSφI nnn′
+ρ∫∫
SIB
dS(∇φI ·nnn
′−UUU ·nnn′)
∇φI
wherennn′ is an inward normal that points into thebody onSI
B and downward onSIW.
We now add (7) to (6) while accounting forthe different meaning ofnnn andnnn′ on SI
W in the twoequations. The result is the disturbance forceFFFD
given by the equation
FFFD ≃−ρ∫∫
SIB
dS
(∂φD
∂t+
12
∇φD ·∇φD
+∇φD ·∇φI
)nnn
≃−ρddt
∫∫
SIB
dSφDnnn−ρddt
∫∫
SIE
dSφDnnn
−ρg∫∫
SIE
dSζDnnn
+ρ∫∫
SIB
dS
(∂φI
∂n−Un
)∇φI ,
which assumes that an integral overSTB is approxi-
mated well by an integral overSIB. This is the part of
the dynamic force acting on the body that dependson φD. The part that depends onφI but not onφD isobtained from (7):
FFFF-K =−ρ∫∫
SIB
dS
(∂φI
∂t+
12
∇φI ·∇φI
)nnn
−ρddt
∫∫
SIB
dSφI nnn+ρddt
∫∫
SIW
dSφI nnn
−ρ∫∫
SIB
dS
(∂φI
∂n−Un
)∇φI
+ρg∫∫
SIW
dSZnnn
(8)
wherennn points into the body onSIB and upward on
SIW. The sum of the nonlinear Froude-Krylov and
disturbance forces is
FFF =−ρ∫∫
SB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ)
nnn
≃−ρddt
∫∫
SIB
dSφDnnn−ρddt
©∫∫
SIB+SI
W
dSφI nnn′
−ρg∫∫
SIW
dSZnnn′
−ρddt
∫∫
SIE
dSφDnnn−ρg∫∫
SIE
dSζDnnn
(9)
where the unit normalnnn′ points into the body onSIB
and downward onSIW.
The total force acting on the vessel may be ob-tained by adding the force due to the hydrostaticpressure in (9) as shown in the equation
FFFTOT =−ρ∫∫
SB
dS
(∂Φ∂t
+12
∇Φ ·∇Φ+gZ
)nnn
≃−ρddt
∫∫
SIB
dSφDnnn−ρddt
©
∫∫
SIB+SI
W
dSφI nnn′
(10)
−ρg©∫∫
SIB+SI
W
dSZnnn′
−ρddt
∫∫
SIE
dSφDnnn−ρg∫∫
SIE
dSζDnnn,
wherennn′ points downward onSIW and into the body
on SIB. Three force components may be identified
in (10).
Nonlinear Buoyancy Force.
Applying the Gauss divergence theorem to thethird term on the right side of (10), we obtain
FFFH =−ρg©∫∫
SIB+SI
W
dSZnnn′ = ρg(t)kkk (11)
wherennn′ points into the enclosed volume. The non-linear hydrostatic force given by (11) acts in the ver-tical direction and on the volume of fluid enclosed
348

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
by the ship wetted surface and the ambient wavesurface interior to the vessel. This buoyancy forcewhich results from the application of the momen-tum theorem differs from the conventional hydro-static force that acts on the open wetted surface ofthe body and which in the nonlinear problem maynot point in the vertical direction.
Momentum Froude-Krylov Force.
The momentum Froude-Krylov force is thetime derivative of the impulse integral involvingjust the ambient wave potential over the instanta-neous ship surface:
FFFF-K =−ρddt
©
∫∫
SIB(t)+SI
W(t)
dSφI nnn′ . (12)
Again nnn′ points into the enclosed volume. The mo-mentum Froude-Krylov force given by (12) differsfrom the conventional Froude-Krylov forceFFFF-K
which involves the integral of the hydrodynamicpressure due to the ambient wave over the instan-taneous ship wetted surface. Although a differentforce, expression (12) is simpler to evaluate numer-ically since it does not involve the time derivativeand spatial gradients of the ambient velocity poten-tial under the integral sign.
Momentum radiation and diffraction force.
The momentum disturbance force has a sim-ilar form to its Froude-Krylov counterpart and in-volves the disturbance radiation and diffraction ve-locity potentials under the integral sign in the defi-nition of the corresponding impulse
FFFD =−ρddt
∫∫
SIB(t)
dS(φRAD +φDIF)nnn. (13)
An advantage of (13) relative to the conventionaldefinition of the nonlinear radiation and diffractionforces is that no time derivative and spatial gradi-ents of the disturbance potentials are present underthe integral sign in the definition of the disturbanceimpulse. This is a significant advantage of (13)which may be readily evaluated robustly assumingknowledge of just the values of the disturbance ve-locity potentials over the instantaneous ship wettedsurface.
Interpretation of Momentum Hydrostatic andFroude-Krylov Forces
The momentum formulation derived above de-composes the total ideal fluid force into three com-ponents which are interpreted as the MomentumHydrostatic, Froude-Krylov (F-K) and DisturbanceForces.
There exists an interdependence between thehydrostatic and Froude-Krylov forces, the under-standing of which in the nonlinear ship responseproblem is essential for the study of the vesselstability problem in steep waves. As pointed outby Telste & Belknap (2008) and Belknap & Tel-ste (2008), the nonlinear hydrostatic and Froude-Krylov force may cancel each other out in certainwave conditions, underscoring the significance ofthe accurate evaluation of these forces and the re-maining disturbance forces. The discussion belowexplains how such a cancellation occurs.
The Momentum F-K Force
The derivation of the momentum hydrostaticand Froude-Krylov forces entailed no approxima-tions in the use of Bernoulli’s equation so they areconsidered exact, given an accurate representationof the kinematics of the ambient wave. The hydro-static force always points upwards and its magni-tude depends on the time dependent displaced vol-ume of the vessel and is given by expression (11).
The nonlinear Froude-Krylov force given by(8) may be reduced further by adding and subtract-ing an integral over the nonlinear waterplane areaof the vessel over the ambient wave free surface in-ternal to the vessel:
FFFF-K =−ρddt
©∫∫
SIB(t)+SI
W(t)
dSφI nnn′+ρ
ddt
∫∫
SIW(t)
dSφI nnn′
= FFFF-K +ρddt
∫∫
SIW(t)
dSφI nnn′ .
(14)
Herennn′ points downward onSIW and into the body
on SB. In (14) the first integral is over a surfaceenclosing the time dependent volume of the ves-sel. The second integral is taken over the nonlin-ear waterplane area and will be seen to be the non-linear extension of the Froude-Krylov hydrostatic-like restoring force acting on a floating vessel. For
349

Proceedings of the 12th International Ship Stability Workshop
a submerged body this term vanishes. For a sur-face piercing body and in the limit of small ampli-tude waves which are long relative to the dimensionof the vessel this term is proportional to the heavehydrostatic restoring coefficientC33ρgAW, whereAW is the static waterplane area, times the ambientwave amplitude.
By applying Gauss’s theorem, the first termmay be reduced to a volume integral:
FFFF-K = ρddt
∫∫∫
(t)
dV∇φI +ρddt
∫∫
SIW(t)
dSφI nnn′ . (15)
The first term in (15) is the time rate of change ofthe linear momentum of all the fluid particles of anambient wave enclosed by the time dependent vol-ume of the vessel. In long waves the volume inte-gral in (15) may to leading order be approximatedby evaluating the ambient wave velocity vector atthe centroid of the time dependent volume of thevessel. It is noted that the location of this centroidis time dependent.
The second integral in (15) has a familiar inter-pretation within linear theory. Recall that the lineardynamic free surface condition takes the form
ζI =−1g
(∂φI
∂t
)
Z=0.
Substituting in (15), exchanging the time differenti-ations with the surface and volume integrations andtaking into account that the unit vector points insidethe volume we obtain the linearized version of themomentum Froude-Krylov force
FFFF-K, LINEAR = ρ∫∫∫
dV∂∂t
∇φI
+ρgkkk∫∫
SIW(t)
dSζI .(16)
The first term in (16) is the inertia component of themomentum Froude-Krylov force which is equal tothe integral of the acceleration of the ambient wavefluid particles within the linearized volume of thevessel below the calm water surface, multiplied bytheir density. The second term is the hydrostaticcontribution which is proportional to the integral
of the ambient wave elevation over the static wa-terplane area of the vessel. For long waves thisintegral may be approximated to leading order bythe product of the waterplane area and the ambi-ent wave elevation at the origin of the coordinatesystem. In this limiting case the hydrostatic com-ponent of the momentum Froude-Krylov force, perunit ambient wave elevation, reduces to the heaverestoring coefficient which appears in the left handside of the linearized vessel equations of motion.As expected, for submerged bodies the hydrostaticcomponent of the momentum Froude-Krylov forcevanishes.
In large amplitude waves the hydrostatic com-ponent of the Froude-Krylov force (15) may becomparable to the time dependent buoyancy force(11). Moreover, while the buoyancy force alwayspoints vertically upwards, the hydrostatic compo-nent of the Froude-Krylov force component has anoblique orientation which is a function of the in-clination of the ambient wave surface contained inthe unit normal vector. In the limit of linear theorythis Froude-Krylov hydrostatic force points verti-cally upwards.
CONCLUSIONS
A new nonlinear momentum formulation has beendeveloped. This formulation leads to the explicitdecomposition of the total hydrodynamic force innonlinear hydrostatics, Froude-Krylov and wavedisturbance forces in steep random waves which areeasily amenable to computation. All force compo-nents appear as time derivatives of the respectivehydrodynamic impulses, defined as spatial integralsof the respective velocity potentials over the vesselinstantaneous wetted surface, which do not requitethe numerical evaluation of time derivatives of thevelocity potential over the vessel wetted surface.
ACKNOWLEDGMENTS
As stated in the Introduction, this work is a sum-mary of someof the significant work contained inSclavounos (2011) and Sclavounos,et al. (2011).The significant contributions of Paul Sclavounosand John Telste are very much appreciated. Themany fruitful discussions with the TEMPEST The-
350

Session 8 Basic Theory & Roll Damping — Intact and Damaged Ships
ory Advisory Panel (TAP) and the efforts of CalvinKrishen who produced the figures are also appreci-ated.
This work was supported by Dr. L. PatrickPurtell of the Office of Naval Research (ONR).
REFERENCES
Belknap W. & J. Telste (2008) Identification ofLeading Order Nonlinearities from Numeri-cal Forced Motion Experiment Results.Proc.27th Symp. Naval Hydro., Seoul, Korea, 18 p.
Lighthill, M. J. (1960) A Note on the Swimming ofSlender Fish.J. Fluid Mech., 9:305–317.
Newman, J. N. (1977)Marine Hydrodynamics.MIT Press, xiii + 402 p., Cambridge, MA.
Newman, J. N. & T. Y. Wu (1973) A Generalized
Slender-Body Theory for Fish-Like Forms.J.Fluid Mech., 57(4):673–693.
Sclavounos, P. D. (2011) Nonlinear Response Mod-elling of a Vessel in Steep Random Waves.MIT Mechanical Engineering Department Re-port, to appear.
Sclavounos, P. D., J. D. Telste & A. M. Reed (2011)Modelling of Nonlinear Vessel Responses inSteep Random Waves. NSWCCD Report toappear.
Telste, J. G. & W. F. Belknap (2008) Poten-tial Flow Forces and Moments from SelectedShip Flow Codes in a Set of Numerical Ex-periments. Carderock Division, Naval Sur-face Warfare Center Report NSWCCD-50-TR-2008/040, 15,240 p.
351