Computational Theory and Methods for Finding Multiple ...
10
Computational Theory and Methods for Finding Multiple Critical Points Jianxin Zhou * 1 Introduction Let H be a Hilbert space and J ∈ C 1 (H, ). Denote δJ its Frechet derivative and J 0 its gradient. The objective of this research is to develop computational theory and methods for finding multiple critical points, i.e., solutions to the Euler-Lagrange equation J 0 (u)=0. A critical point u * is nondegenerate if J 00 (u * ) is invertible. Otherwise u * is degenerate. The first candidates for a critical point are the local extrema to which the classical critical point theory was devoted in calculus of variation. Most conventional numerical algorithms focus on finding such stable solutions. Critical points that are not local extrema are unstable and called saddle points. In physical systems, saddle points appear as unstable equilibria or transient excited states. (In)Stability is one of the main concerns in system design and control. However, in many applications, performance or maneuverability is more desirable. An unstable solution can be stable enough to accomplish a short term mission before being excited to decay to another desirable state [14,15,22] and it may have much higher performance or maneuverability index. Due to unstable nature, those multiple solutions are very elusive to be numerically cap- tured. Little is known in the literature. Minimax method is one of the most popular ap- proaches in critical point theory, But most minimax theorems, such as, the mountain pass, various linking and saddle point theorems, focus on the existence issue. They require one to solve a two-level global optimization problem and therefore are not for algorithm implemen- tation. Inspired by the numerical work of Chio-McKenna and Ding-Costa-Chen in [9,12], the idea of Nehari and Ding-Ni to define a solution manifold and the Morse theory, we present a local minimax method (LMM). Consider a semilinear elliptic BVP as a model problem Δu(x)+ f (x, u(x)) = 0 x ∈ Ω (1.1) for u ∈ H = H 1 0 (Ω) where Ω ⊂ N is bounded and open, f (x, t) is nonlinear satisfying f (x, 0) = 0 and other standard conditions. The variational functional is the energy J (u)= Z Ω { 1 2 |∇u(x)| 2 - F (x, u(x))} dx with F (x, t)= Z t 0 f (x, τ )dτ. (1.2) It can be shown that (weak) solutions to (1.1) coincide with critical points of J in H . * Texas A&M University, College Station, Texas, U.S.A. [email protected] 1
Transcript of Computational Theory and Methods for Finding Multiple ...

Computational Theory and Methods for Finding
Multiple Critical Points
Jianxin Zhou∗
1 Introduction
Let H be a Hilbert space and J ∈ C1(H,). Denote δJ its Frechet derivative and J ′ its
gradient. The objective of this research is to develop computational theory and methods forfinding multiple critical points, i.e., solutions to the Euler-Lagrange equation J ′(u) = 0. Acritical point u∗ is nondegenerate if J ′′(u∗) is invertible. Otherwise u∗ is degenerate. The firstcandidates for a critical point are the local extrema to which the classical critical point theorywas devoted in calculus of variation. Most conventional numerical algorithms focus on findingsuch stable solutions. Critical points that are not local extrema are unstable and called saddlepoints. In physical systems, saddle points appear as unstable equilibria or transient excitedstates.
(In)Stability is one of the main concerns in system design and control. However, in manyapplications, performance or maneuverability is more desirable. An unstable solution can bestable enough to accomplish a short term mission before being excited to decay to anotherdesirable state [14,15,22] and it may have much higher performance or maneuverability index.
Due to unstable nature, those multiple solutions are very elusive to be numerically cap-tured. Little is known in the literature. Minimax method is one of the most popular ap-proaches in critical point theory, But most minimax theorems, such as, the mountain pass,various linking and saddle point theorems, focus on the existence issue. They require one tosolve a two-level global optimization problem and therefore are not for algorithm implemen-tation. Inspired by the numerical work of Chio-McKenna and Ding-Costa-Chen in [9,12], theidea of Nehari and Ding-Ni to define a solution manifold and the Morse theory, we present alocal minimax method (LMM). Consider a semilinear elliptic BVP as a model problem
∆u(x) + f(x, u(x)) = 0 x ∈ Ω (1.1)
for u ∈ H = H10 (Ω) where Ω ⊂
N is bounded and open, f(x, t) is nonlinear satisfying
f(x, 0) = 0 and other standard conditions. The variational functional is the energy
J(u) =
∫
Ω
1
2|∇u(x)|2 − F (x, u(x)) dx with F (x, t) =
∫ t
0
f(x, τ)dτ. (1.2)
It can be shown that (weak) solutions to (1.1) coincide with critical points of J in H.∗Texas A&M University, College Station, Texas, U.S.A. [email protected]
1

2 A Local Minimax Method and Its Convergence
For a subspace H ′ ⊂ H, let SH′ = v|v ∈ H ′, ‖v‖ = 1. Let L be a closed subspace in H,called a support, for v ∈ SL⊥ , denote L, v = tv + w|w ∈ L, t ∈
.
Definition 2.1 A set-valued mapping P : SL⊥ → 2H is called the peak mapping of J w.r.t. L
if for v ∈ SL⊥ , P (v) is the set of all local maximum points of J on L, v. A single-valuedmapping p: SL⊥ → H is a peak selection of J w.r.t. L if p(v) ∈ P (v) ∀v ∈ SL⊥. For v ∈ SL⊥,we say that J has a local peak selection w.r.t. L at v, if there is a neighborhood N (v) of v anda mapping p:N (v) ∩ SL⊥ → H s.t. p(u) ∈ P (u) ∀u ∈ N (v) ∩ SL⊥.
Lemma 2.1 [18] Let vδ ∈ SL⊥. If J has a local peak selection p w.r.t. L at vδ s.t. p iscontinuous at vδ and dis(p(vδ), L) > α > 0 for some α > 0, then either J ′(p(vδ)) = 0 or forany δ > 0 with ‖J ′(p(vδ))‖ > δ, there exists s0 > 0, s.t.
J(p(v(s)))−J(p(vδ)) < −αδ‖v(s)−vδ‖, ∀0 < s < s0 with v(s) =vδ + sd
‖vδ + sd‖, d = −J ′(p(vδ)).
Theorem 2.1 [18] If J has a local peak selection p w.r.t. L at v0 ∈ SL⊥ s.t. (a) p iscontinuous at v0, (b) dis(p(v0), L) > 0 and (c) v0 is a local minimum point of J(p(v)) on SL⊥,then p(v0) is a critical point of J .
Define a solution set M = p(v) : v ∈ SL⊥. When L = 0, M corresponds to Nehari orDing-Ni’s solution manifold. Then a local minimum point of J on M yields a saddle point,which can be approximated by, e.g., a steepest descent method. It leads to the following localminimax algorithm
Step 1: Given ε > 0, λ > 0 and n − 1 previously found critical points w1, w2, . . . , wn−1 ofJ , of which wn−1 has the highest critical value. Set L = spanw1, w2, . . . , wn−1. Letv1 ∈ SL⊥ be an ascent direction at wn−1. Let t00 = 1, v0
L = wn−1 and set k = 0;
Step 2: Using the initial guess w = tk0vk + vk
L, solve for
wk ≡ p(vk) = arg maxu∈[L,vk]
J(u), and denote tk0vk + vk
L = wk ≡ p(vk);
Step 3: Compute the steepest descent vector dk = −J ′(wk);
Step 4: If ‖dk‖ ≤ ε then output wn = wk, stop; else goto Step 5;
Step 5: Set vk(s) =vk + sdk
‖vk + sdk‖and use initial guess u = tk0v
k( λ2m ) + vk
L to find p(vk( λ2m ))
in [L, vk( λ2m )] where tk0 and vk
L are found in Step 2 and, find
sk = max λ
2m
∣
∣
∣m ∈ , 2m > ‖dk‖, J(p(vk(
λ
2m))) − J(wk) ≤ −
tk02‖dk‖ ‖vk(
λ
2m) − vk‖
.
2

Step 6: Set vk+1 = vk(sk) and update k = k + 1 then goto Step 2.
Initial guesses in Steps 2 and 5 are used to closely and consistently trace the position of theprevious point wk = tk0v
k + vkL. This strategy is also to avoid the algorithm from possible
oscillating between different branches of the peak mapping P . In Step 3, the steepest descentdirection dk = −J ′(wk) (or the negative gradient) at a known point wk, is usually computedby solving a corresponding linearized problem (ODE or PDE).
Definition 2.2 At v ∈ SL⊥ , if d = −J ′(p(v)) 6= 0, denote v(s) =v + sd
‖v + sd‖and define the
stepsize at v by
s(v) = maxλ≥s≥0
s∣
∣
∣λ > s‖d‖, J(p(v(s))) − J(p(v)) ≤ −
1
2dis(L, p(v))‖d‖‖v(s)− v‖
. (2.1)
Theorem 2.2 Let vk and wk = p(vk), k = 0, 1, 2, ... be the sequence generated by the algorithms.t. p is continuous at vk and wk 6∈ L, then the algorithm is strictly decreasing and thus stable.
Theorem 2.3 [19] Let p be a peak selection of J w.r.t. L and J satisfy the (PS) condition. If(a) p is continuous, (b) dis(L, wk) > α > 0, ∀k = 0, 1, 2, ... and (c) infv∈S
L⊥J(p(v)) > −∞,
then (1) wk∞k=0 has a subsequence wki =p(vki) converges to a critical point; (2) any limitpoint of wk is a critical point of J . In particular, any convergent subsequence wki of wkconverges to a critical point.
Let us define K =
w ∈ H
∣
∣
∣J ′(w) = 0
and Kc =
w ∈ H
∣
∣
∣J ′(w) = 0, J(w) = c
.
Theorem 2.4 [19] Assume that V1 and V2 are open sets in H with ∅ 6= (V2∩SL⊥) ⊂ (V1∩SL⊥).Set V ′
1 = V1 ∩ SL⊥ and V ′2 = V2 ∩ SL⊥. If a peak selection p of J w.r.t. L determined by the
algorithm is continuous in V ′1 satisfying (a) p(V ′
1) ∩ K ⊂ Kc, where c = infv∈V ′
1J(p(v)) and
(b) there is d > 0, s.t.
infJ(p(v))|v ∈ V ′1 , dis(v, ∂V ′
1) ≤ d = a > b = supJ(p(v))|v ∈ V ′2 > c.
Let λ < d be chosen in the stepsize rule of the algorithm and wk∞k=0 be generated by thealgorithm started from any v0 ∈ V ′
2 and dis(L, wk) > α > 0 ∀k = 0, 1, 2, .., then for anyε > 0, there exists an N s.t. for any k > N ,
dis(wk, Kc) < ε.
Theorem 2.5 Assume the peak selection p determined by the algorithm is continuous. IfJ(p(v)) = loc minv∈S
L⊥J(p(v)) and p(v) is an isolated critical point with dis(p(v), L) > 0,
then there exists an open set V in H, v ∈ V ∩ SL⊥ , s.t. starting from any v0 ∈ V ∩ SL⊥, thesequence wk∞k=0 generated by the algorithm converges to p(v).
The above convergence results are based on functional analysis. It is assumed that at eachstep of the algorithm the computation is exact. Convergence results allowing error to existhave been recently obtained by us.
3

3 A Local Min-L-⊥ Method
In the local minimax theory, we need to check if a local peak selection p is continuous ordifferentiable at v∗. This is very difficult, since p is not explicitly defined and the graph of p
is, in general, not closed, an ill condition in numerical computation. On the other hand, nonminimax type saddle points, such as the monkey saddles do exist. minimax principle can notcover them. In this section, we present a more general approach to solve those problems.
Applying Nehari’s idea to (1.1), Ding-Ni defined a solution manifold [25]
M =
v ∈ H10 (Ω)|v 6= 0,
∫
Ω
[
|∇v|2 − vf(v)]
dx = 0
, (3.1)
and proved that a global minimizer of J on M yields a solution (MI= 1). Using Green’sidentity, we can rewrite (3.1) as
M =
v ∈ H10 (Ω)|v 6= 0,
∫
Ω
v [∆v + f(v)] dx = 0
=
v ∈ H10 (Ω)|v 6= 0, 〈J ′(v), v〉H1
0(Ω) = 0
.
it becomes an orthogonal condition. This observation inspires us to
Definition 3.1 Let L be a closed subspace of H. A set-valued mapping P : SL⊥ → 2H is an L-⊥ mapping of J if P (v) = u ∈ L, v : J ′(u) ⊥ L, v ∀v ∈ SL⊥. A mapping p: SL⊥ → H
is an L-⊥ selection of J if p(v) ∈ P (v) ∀v ∈ SL⊥ . Let v ∈ SL⊥ and N (v) be a neighborhoodof v. if P (p) is locally defined in N (v) ∩ SL⊥, then P (p) is a local L-⊥ mapping (selection)of J at v.
It is clear that a local peak selection is a local L-⊥ selection. The graph of P can be verycomplex, it may contain multiple branches, U-turn or bifurcation points. We show that suchdefined L-⊥ selection has several interesting properties.
Lemma 3.1 If J is C1, then the graph G = (u, v) : v ∈ SL⊥ , u ∈ P (v) 6= ∅ is closed.
Thus the ill-condition for a local peak selection has been removed.
Definition 3.2 Let v∗ ∈ SL⊥ and p a local L-⊥ selection of J at v∗. Assume u∗ = p(v∗) ∈ L,we say that u∗ is an isolated L-⊥ point of J w.r.t. p if there exist neighborhoods N (u∗) of u∗
and N (v∗) of v∗ s.t.N (u∗) ∩ L ∩ p(N (v∗) ∩ SL⊥) = u∗,
i.e., for each v ∈ N (v∗) ∩ SL⊥ and v 6= v∗ either p(v) 6∈ L or p(v) = u∗.
Theorem 3.1 Let v∗ ∈ SL⊥ and p be a local L-⊥ selection of J at v∗ and continuous atv∗. Assume either p(v∗) 6∈ L or p(v∗) ∈ L is an isolated L-⊥ point of J w.r.t. p, then anecessary and sufficient condition that u∗ = p(v∗) is a critical point of J is that there exists aneighborhood N (v∗) of v∗ s.t.
J ′(p(v∗)) ⊥ p(v) − p(v∗), ∀v ∈ N (v∗) ∩ SL⊥. (3.2)
4

Remark 3.1 The nature of a critical point is about orthogonality. Except for J ′, J is notinvolved in the theorem. It implies that the result is still true for non variational problem. Re-placing J ′ by an operator A : H → H in the definition of a local L-⊥ selection p, Theorem 3.1provides a necessary and sufficient condition that u∗ = p(v∗) solves A(u) = 0, a potentiallyuseful result in solving multiple solutions to non variational problems. We have the flowinglocal characterization of a critical point.
Lemma 3.2 [33] Let H be a Hilbert space, L be a closed subspace of H and J ∈ C1(H,).
Let v ∈ SL⊥ and p be a local L-⊥ selection of J at v s.t. (a) p is continuous at v, (b) eitherp(v) 6∈ L or p(v) ∈ L is an isolated L-⊥ point of J , (c) v is a local minimum point of thefunction J(p(·)) on SL⊥ , then u = p(v) is a critical point of J .
Replacing the local maximization by a local orthogonalization in Steps 2 and 5 in the localminimax algorithm, we obtain a local min-⊥ algorithm.
Next we study how to check the differentiability of an L-⊥ selection p. When an L-⊥selection p is introduced, various implicit function theorems can be used to check its continuityor smoothness. Let L = w1, w2, .., wn and v ∈ SL⊥. Following the definition of p, u =t0v + t1w1 + ... + tnwn = p(v) is solved from (n+1) orthogonal conditions
F0(v, t0, t1, ..., tn) ≡ 〈J ′(t0v + t1w1 + ... + tnwn), v〉 = 0,
Fj(v, t0, t1, ..., tn) ≡ 〈J ′(t0v + t1w1 + ... + tnwn), wj〉 = 0, j = 1, ..., n
for t0, t1, ..., tn. We have
∂F0
∂t0= 〈J ′′(t0v + t1w1 + ... + tnwn)v, v〉,
∂F0
∂ti= 〈J ′′(t0v + t1w1 + ... + tnwn)wi, v〉, i = 1, 2, ..., n.
∂Fj
∂t0= 〈J ′′(t0v + t1w1 + ... + tnwn)v, wj〉, j = 1, 2, ..., n.
∂Fj
∂ti= 〈J ′′(t0v + t1w1 + ... + tnwn)wi, wj〉, i, j = 1, 2, ..., n.
By the implicit function theorem, if the (n + 1) × (n + 1) matrix
Q′′ =
〈J ′′(u)v, v〉, 〈J ′′(u)w1, v〉, ... 〈J ′′(u)wn, v〉〈J ′′(u)v, w1〉, 〈J ′′(u)w1, w1〉, ... 〈J ′′(u)wn, w1〉... ...
〈J ′′(u)v, wn〉, 〈J ′′(u)w1, wn〉, ... 〈J ′′(u)wn, wn〉
(3.3)
is invertible or |Q′′| 6= 0, then p is differentiable at and near v. This condition can be easilyand numerically checked.
5

4 Instability Analysis by the Local Minimax Method
Definition 4.1 A vector v ∈ H is said to be a decreasing direction of J at a critical pointu∗ ∈ H if there exists T > 0 s.t. J(u∗ + tv) < J(u∗) ∀ T > t > 0.
In general, the set of all decreasing vectors of J at u∗ does not form a linear vector space. Themaximum dimension of a subspace of decreasing directions of J at u∗ can be used to measurelocal instability of u∗ and is called the local instability index of u∗. Since such an index lacksof characterization and is too difficult to compute, let us consider several alternatives.
When J ′′(u∗) : H → H is a self-adjoint Fredholm operator at a critical point u∗, theHilbert space H has an orthogonal spectral decomposition H = H− ⊕ H0 ⊕ H+ whereH−, H0 and H+ are respectively the maximum negative definite, the null and the maximumpositive definite subspaces of J ′′(u∗) in H with dim(H0) < ∞. The Morse index (MI) of u∗ isMI(u∗) = dim(H−). When u∗ is nondegenerate, i.e., H0 = 0, MI(u∗) is the local instabilityindex of J at u∗ [28]. But MI is very expensive to compute and it is ineffective in measuringlocal instability of a degenerate critical point.
In our local minimax method, u∗ = p(v∗) is a local maximum point of J in the subspaceL, v∗. The dimension of L, v∗, which equals dim(L) + 1, is known even before we nu-merically find the solution u∗ and can be used to measure local instability of u∗ even u∗ isdegenerate. We establish some relations between MI and the number dim(L) + 1.
Theorem 4.1 [32] Let v∗ ∈ SL⊥. Assume that J has a local peak selection p w.r.t. L at v∗
s.t. (a) p is continuous at v∗, (b) u∗ ≡ p(v∗) 6∈ L and (c) v∗ = arg minv∈SL⊥
J(p(v)). If either
H− ∩ L, v∗⊥ = 0 or p is differentiable at v∗, then u∗ is a critical point with
dim(L) + 1 = MI (u∗) + dim(H0 ∩ L, v∗). (4.1)
Remark 4.1 The result in the last theorem is multi-fold. First, it provides a method to eval-uate MI of a saddle point without actually finding dim(H−), a very expensive job. Secondly,it indicates that dim(L) + 1 is better than MI in measuring local instability for a degeneratesaddle point u∗.
One question still remains: how to determine dim(H0 ∩ L, v∗)? Since it is usuallyvery expensive to find H0, we point out that one does not have to find H0 to determinedim(H0 ∩ L, v∗. To see this, let L = w1, ..., wn where w1, ..., wn are linearly independentand define the quadratic function
Q(t0, t1, .., tn) ≡1
2〈J ′′(u∗)(t0v
∗ + t1w1 + ... + tnwn), (t0v∗ + t1w1 + ... + tnwn)〉
=1
2(t0, t1, ..., tn)Q′′(t0, t1, ..., tn)
T (4.2)
where Q′′ is the (n + 1) × (n + 1) matrix given in (3.3). Let us observe that (t0v∗ + t1w1 +
... + tnwn) ∈ H0 ∩ L, v∗ implies (t0, t1, ..., tn) ∈ ker(Q′′), i.e.,
(H0 ∩ L, v∗) ⊂
t0v∗ + t1w1 + ... + tnwn : (t0, t1, ..., tn) ∈ kerQ′′
.
kerQ′′ = 0 or |Q′′| 6= 0 implies dim(H0 ∩ L, v∗) = 0 even H0 6= 0.
6

Theorem 4.2 [32] Let v∗ ∈ SL⊥. Assume J has a local peak selection p w.r.t. L at v∗ s.t.p is continuous at v∗, u∗ ≡ p(v∗) 6∈ L and v∗ = arg minv∈S
L⊥J(p(v)). If p is differentiable at
v∗, then u∗ is a critical point with 0 ≤ dim(L) + 1 − MI (u∗) ≤ dim(kerQ′′).
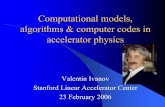
5 Selected Numerical Examples
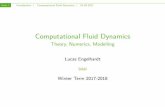
For a semilinear elliptic BVP
∆u(x) + |x|qup(x) = 0, x ∈ Ω,
u(x) = 0, x ∈ ∂Ω,
we consider the Lane-Emden equation (q = 0, p = 3) on a dumbbell-shaped domain Ω in 2 and the Henon equation (q = 3, p = 3) on the same dumbbell-shaped domain Ω and(q = 9, p = 3) on the unit disk Ω in
2 . In all our numerical examples here, we set ε < 10.−4.
−1.5 −1 0 1 2 3−1
0
1
−1.5 −1 0 1 2 3−1
0
1
−5
0
10
15
−1.5−10123
−1
0
1
Figure 1: Lane-Emden: The domain (left) and the ground state solution (right).
−5
0
10
15
−1
0
1
−10
12
3
−5
0
10
15
−1
0
1
−10
12
3
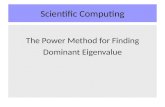
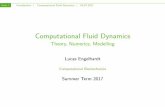
Figure 2: Lane-Emden: The 2nd solution MI=1 (left) and the 3rd solution MI=1 (right).
−5
0
10
15
−1.5−10123
−1
0
1
−5
0
10
15
−1
0
1
−1.5 −1 0 1 2 3
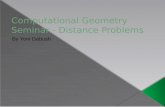
Figure 3: Lane-Emden: A solution MI=2 (left) and a solution MI=3 (right).
7

w−
axis
−0.5
0
1
2
x−axis−1
01
23
y−axis
−1
0
1
−1.5 −1 0 1 2 3−1
0
1
x−axis
y−ax
is
0.05
05
0.0505
0.0505
0.0505
0.11
9
0.119
0.119
0.187
0.187
0.18
7
0.256
0.25
6
0.256
0.324
0.324
0.32
4
0.392
0.39
2
0.392
0.461
0.461
0.529
0.529
0.597
0.59
7
0.666
0.666
0.734
0.734
0.8020.802
0.871
0.871
0.939
0.939
1.011.08
1.14
1.21
1.281.35
1.42
1.49 1.551.62
−1.5 −1 0 1 2 3−1
0
1
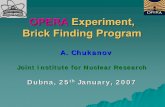
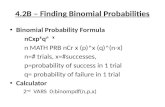
Figure 4: Henon: (q=3) The ground state solution (left) and its contours (right).
w−
axis
−1
0
1
2
3
4
5
6
7
y−axis
−1
0
1 x−axis
−10
12
3
−1.5 −1 0 1 2 3−1
0
1
x−axis
y−ax
is
0.419
0.419
0.845
1.27
1.7
2.12
2.55
2.983.4
3.83
4.25
4.68
−1.5 −1 0 1 2 3−1
0
1
Figure 5: Henon: (q=3) The second solution MI= 1 (left) and its contours (right).
w−
axis
−1
0
1
2
3
4
5
6
7
y−axis−1
0
1
x−axis
−1.5−10123
−1.5 −1 0 1 2 3−1
0
1
x−axis
y−ax
is
0.238
0.23
8
0.238 0.238
0.23
8
0.238
0.49
4
0.494
0.494
0.494
0.75
0.75
0.75
0.75
1.01
1.01
1.01
1.26
1.26
1.52
1.52
1.77
2.03
2.292.54
2.8
3.06
3.31
3.57 3.82
4.08
4.34
4.85
5.62
−1.5 −1 0 1 2 3−1
0
1
Figure 6: Henon: (q=3) A solution MI=2 (left) and its contours (right).
u−ax
is
−6.308
0
10
20
30
33.11
Y−axis −1
0
1
X−axis−1
0
1
u−ax
is
−6.13
0
10
20
3032.18
Y−axis
−1
0
1 X−axis
−1
0
1
Figure 7: Henon: q=9. A 1-peak solution MI=1 (left) and a 2-peak solution MI=2 (right).
8

u−ax
is
−5.848
0
10
20
30
Y−axis
−1
0
1 X−axis
−1
0
1
u−ax
is
−5.327
0
10
20
27.97
Y−axis
−1
0
1
X−axis
−10
1
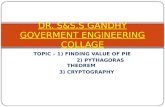
Figure 8: Henon: q=9. A 3-peak solution MI=3 (left) and a 4-peak solution MI=4 (right).
References
[1] A. Ambrosetti and P. Rabinowitz, “Dual variational methods in critical point theoryand applications”, J. Funct. Anal. 14(1973), 349-381.
[2] A. Bahri and P.L. Lions, “Morse index of some min-max critical points. I. Applicationto multiplicity results”, Comm. Pure Appl. Math., Vol. XLI (1988) 1027-1037.
[3] A. Bahri and P.L. Lions, “Solutions of superlinear elliptic equations and their Morseindices”, Communications on Pure and Applied Math., 45(1992), 1205-1215.
[4] T. Bartsch, K. C. Chang and Z. Q. Wang, “On the Morse indicex of sign changingsolutions of nonlinear elliptic problems”, Math. Z. 233 (2000), 655-677.
[5] H. Brezis and L. Nirenberg, “Remarks on Finding Critical Points”, Communications onPure and Applied Mathematics, Vol. XLIV, 939-963, 1991.
[6] K.C. Chang, Infinite Dimensional Morse Theory and Multiple Solution Problems,Birkhauser, Boston, 1993.
[7] G. Chen, W.M. Ni and J. Zhou, “Algorithms and visualization for solutions of nonlinearelliptic equation, Part I: Dirichlet Problem”, Int. J. Bifurcation & Chaos, 7(2000), 1565-1612.
[8] G. Chen, W.M. Ni, A. Porronnet and J. Zhou, “Algorithms and visualization for solu-tions of nonlinear elliptic equations, Part II: Dirichlet, Neumann and Robin boundaryconditions and problems in 3D”, Int. J. Bifurcation & Chaos, 7(2001) 1781-1799.
[9] Y. S. Choi and P. J. McKenna, “A mountain pass method for the numerical solutionof semilinear elliptic problems”, Nonlinear Analysis, Theory, Methods and Applications,20(1993), 417-437.
[10] Y. Chen and P. J. McKenna, Traveling waves in a nonlinearly suspended beam: Theo-retical results and numerical observations, J. Diff. Equ., 136(1997), 325-355.
[11] W.Y. Ding and W.M. Ni, “On the existence of positive entire solutions of a semilinearelliptic equation”, Arch. Rational Mech. Anal. 91(1986),
[12] Z. Ding, D. Costa and G. Chen, “A high linking method for sign changing solutions forsemilinear elliptic equations”, Nonlinear Analysis, 38(1999) 151-172.
9

[13] I. Ekeland and N. Ghoussoub, Selected new aspects of the calculus of variations in thelarge, Bull. Amer. Math. Soc. (N.S.), 39(2002), 207-265.
[14] J.J. Garcia-Ripoll, V.M. Perez-Garcia, E.A. Ostrovskaya and Y. S. Kivshar, “Dipole-mode vector solitons”, Phy. Rev. Lett. 85(2000), 82-85.
[15] J.J. Garcia-Ripoll and V.M. Perez-Garcia, “Optimizing Schrodinger functionals usingSobolev gradients: Applications to quantum mechanics and nonlinear optics”, SIAM Sci.Comp. 23(2001), 1316-1334.
[16] J. Q. Liu and S. J. Li, “Some existence theorems on multiple critical points and theirapplications”, Kexue Tongbao 17 (1984)
[17] S.J. Li and M. Willem, “Applications of local linking to critical point theory”, J. Math.Anal. Appl. 189 (1995), 6–32.
[18] Y. Li and J. Zhou, “A minimax method for finding multiple critical points and its appli-cations to semilinear PDE”, SIAM J. Sci. Comp., 23(2001), 840-865.
[19] Y. Li and J. Zhou, “Convergence results of a local minimax method for finding multiplecritical points”, SIAM J. Sci. Comp., to appear.
[20] Y. Li and J. Zhou, “Local characterization of saddle points and their Morse indices”,Control of Nonlinear Distributed Parameter Systems, pp. 233-252, Marcel Dekker, NewYork, 2001.
[21] J. Mawhin and M. Willem, Critical Point Theory and Hamiltonian Systems, Springer-Verlag, New York, 1989.
[22] Z.H. Musslimani, M. Segev, D.N. Christodoulides and M. Soljacic, “Composite Multi-hump vector solitons carrying topological charge”, Phy. Rev. Lett. 84(2000) 1164-1167.
[23] Z. Nehari, “On a class of nonlinear second-order differential equations”, Trans. Amer.Math. Soc. 95 (19960), 101-123.
[24] W.M. Ni, Some Aspects of Semilinear Elliptic Equations, Dept. of Math. National TsingHua Univ., Hsinchu, Taiwan, Rep. of China, 1987.
[25] W.M. Ni, Recent progress in semilinear elliptic equations, in RIMS Kokyuroku 679, KyotoUniversity, Kyoto, Japan, 1989, 1-39.
[26] P. Rabinowitz, “Minimax Method in Critical Point Theory with Applications to Dif-ferential Equations”, CBMS Regional Conf. Series in Math., No. 65, AMS, Providence,1986.
[27] E. A. Silva, “Multiple critical point for asymtotically quadratic functionals”, Comm.Part. Diff. Euq. 21 (1996), 1729-1770.
[28] J, Smoller, Shack Waves and Reaction-Diffusion Equatios, Springer-Verlag, New York,1983.
[29] S. Solimini, “Morse index estimates in min-max theorems”, Manuscripta Math. 63 (1989),421-453.
[30] M. Struwe, “Variational Methods”, Springer, 1996.
[31] M. Willem, Minimax Theorems, Birkhauser, Boston, 1996.
[32] J. Zhou, “Local Instability Analysis of Saddle Points by a Local Minimax Method”, inreview.
[33] J. Zhou, “A min-orthogonal method for finding multiple saddle points.”, in review.
10