ChewMA1506-14 Ch6
39
MA1506 Mathematics II Chapter 6 Linear Transformation 1 Chew T S MA1506-14 Chapter 6
-
Upload
indigo-blue -
Category
Documents
-
view
17 -
download
2
description
asdfasdf
Transcript of ChewMA1506-14 Ch6

MA1506 Mathematics II
Chapter 6 Linear Transformation
1 Chew T S MA1506-14 Chapter 6

6.1 What is a Linear Transformation
In this chapter, transformations are mappings (rules) that send vectors to vectors
Linear transformation T further satisfies
2 Chew T S MA1506-14 Chapter 6
( ) ( ) ( )T u v T u T vα β α β+ = +

Examples
Identity transformation is linear
Check
3 Chew T S MA1506-14 Chapter 6
6.1 What is a Linear Transformation
( )I u u=
( ) ( ) ( )I u v u v I u I vα β α β α β+ = + = +
Let D be the transformation ( ) 2D u u=
D is linear
( ) 2( ) ( ) ( )D u v u v D u D vα β α β α β+ = + = +
Check

Then T is a linear transformation
1 32 4
Given
Define T u1 32 4
u =
= multiplication of matrices
1 3( ) ( )
2 4T u v u vα β α β
+ = +
1 3 1 32 4 2 4
u vα β = +
1 3 1 32 4 2 4
u vα β = +
Tu Tvα β= +
Example
4 Chew T S MA1506-14 Chapter 6
is 2-dim vector (2x1 matrix)
6.1 What is a Linear Transformation
u

6.2 Linear transformations and matrices
Every vector u in 2-D space can be represented by
Let T be a linear transformation defined in 2-D space. Then
5 Chew T S MA1506-14 Chapter 6
just need to know
ˆ ˆai bj+
ˆ ˆ ˆ ˆ( ) ( )T u T ai bj aTi bTj= + = +

Every vector u in 3-D space can be represented by
Let T be a linear transformation defined in 3-D space. Then
6 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
just need to know
ˆˆ ˆai bj ck+ +
ˆ ˆˆ ˆ ˆ ˆ( ) ( )T u T ai bj ck aTi bTj cTk= + + = + +

Example: Given
7 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
i
j
1ˆ ˆ ˆ4
Ti i j= + 1ˆ ˆ ˆ4
Tj i j= +
ˆ ˆ ˆ ˆ(2 3 ) 2 3T i j Ti Tj+ = +1 1ˆ ˆ ˆ ˆ2( ) 3( )4 4
i j i j= + + +11 7ˆ ˆ4 2
i j= +
1ˆ ˆ4
i j+
1 ˆ ˆ4
i j+T
We can find T(u). For example

Next we want to show that every linear Transformation T maps n-dim vectors to m-dim vectors can be represented by a Matrix A Furthermore Tu=Au=multiplication of matrices A and u
8 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices

All necessary info about T
is called Matrix of T relative to
Suppose
9
6.2 Linear transformations and matrices
a bc d
ˆ ˆ ˆ aTi ai cj
c = + =
ˆ ˆ ˆ bTj bi dj
d = + =
ˆ ˆ,i j or in coordinates(system)
ˆ ˆ( , )i j
Shall prove a bTu u
c d
=
Now we shall prove the result we just mentioned

1ˆ0
a b a b ai
c d c d c
= =
0ˆ1
a b a b bj
c d c d d
= =
a bu
c d
=
so
10 Chew T S MA1506-14 Chapter 6
a bc d
α β
= +
ˆ ˆ( )a b
i jc d
α β
+
6.2 Linear transformations and matrices
𝑢 =𝛼𝛽 = 𝛼𝚤 + 𝛽𝚥 Let
We shall compute 𝑎 𝑏𝑐 𝑑 𝑢
First compute

On the other hand, recall
a bc d
α β = +
So
Hence
Thus T can be represented by a matrix
11 Chew T S MA1506-14 Chapter 6
ˆ ˆ ˆ ˆ( )ˆTu T i j Ti Tjα β α β= + = +
ˆ ˆa b
Tu uc d
= (See the above equality and previous slide)
6.2 Linear transformations and matrices
a bc d
ˆ ˆ ˆ aTi ai cj
c = + =
ˆ ˆ ˆ bTj bi dj
d = + =
in coordinates(system) ˆ ˆ( , )i j

Example
Identity transformation
Hence
12 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
Iu u=
1 00 1
I =
1ˆ ˆ0
Ii i = =
0ˆ ˆ1
Ij j = =

Example
Linear transformation T
13 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
114
1 14
T
=
1ˆ ˆ ˆ4
Ti i j= +1ˆ ˆ ˆ4
Tj i j= +

Example
1 2 34 5 67 8 9
T =
14 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
ˆˆ ˆ ˆ4 7Ti i j k= + +ˆˆ ˆ ˆ2 5 8Tj i j k= + +
ˆ ˆˆ ˆ3 6 9Tk i j k= + +

Example
T : 2-D vectors 3-D vectors
15 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
ˆˆ ˆ ˆ 2Ti i j k= + +
ˆˆ ˆ 3Tj i k= −
1 11 02 3
T =
−

Example
T : 3-D vectors 2-D vectors
16 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices
ˆ ˆ2Ti i=ˆ ˆ ˆTj i j= +
ˆ ˆ ˆTk i j= −
2 1 10 1 1
T = −

Dimension of linear transformation
T : 2-D vectors 2-D vectors
T is 2 dimensional if
T : 3-D vectors 3-D vectors
T is 3 dimensional if
17 Chew T S MA1506-14 Chapter 6
6.2 Linear transformations and matrices

Recall if T maps 2-dim vectors to 2 dim vectors then T can be represented by 2x2 matrix We define det(T)=det( )
6.3 Determinant of linear transformation
a bT
c d
=
a bc d
Determinant of 2-D transformation
18 Chew T S MA1506-14 Chapter 6

Determinant of 3-D Transformation
Recall if T maps 3-dim vectors to 3-dim vectors then T can be represented by 3x3 matrix A
We define det(T)=det(A)
19 Chew T S MA1506-14 Chapter 6
6.3 Determinant of linear transformation

6.4 Volume and Determinant
Area of parallelogram = base x height
normal multiplication
cross product 20 Chew T S MA1506-14 Chapter 6
v
uθ
sinu v θ= ×
u v= ×
= |𝑎𝑑 − 𝑏𝑐| = |detA|
𝑢 = 𝑎𝑏 𝑣 = 𝑐
𝑑
A= 𝑎 𝑐𝑏 𝑑
Let
Let which is the matrix induced by vectors u and v
sinu v u v nθ× =
n is unit vector n u⊥
n v⊥
00
( )
i j ku v a b
c d
ad bc k
× =
= −

vol of parallelepiped = base area x height
21 Chew T S MA1506-14 Chapter 6
6.4 Volume and Determinant
Let A=𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
𝑢 =𝑎11𝑎21𝑎31
𝑣 =𝑎12𝑎22𝑎32
𝑤 =𝑎13𝑎23𝑎33
= |detA| Proof omitted

One to one (non–singular ) linear transformation
6.5 Properties of linear transformation
T(0)=T(0+0)=T(0)+T(0)
Hence T(0)=0 (Property 1)
Suppose transformation T is linear. Then
A transformation T is said to be one to one if
i.e., T(u)=T(v), then u=v
0=zero vector
22 Chew T S MA1506-14 Chapter 6
it never maps distinct vectors to the same vector

Property 2: Let T be a linear transformation. Then the following properties are equivalent: (1) T is 1-1 (2) If T(u)=0, then u=0=zero vector, i.e., only one vector maps to zero vector, that vector is zero Proof: (1) implies (2) Suppose T(u)=0. We know that T(0)=0 By (1), u=0 (2) implies (1)
Suppose T(u)=T(v). Then T(u-v)=0. By (2), u-v=0 23 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation

From now onwards, we only consider linear transformations T from n-dim space to n-dim space. We know that T can be represented by a square matrix A and Tu=Au. Here Au is the multiplication of two matrices. So properties of T can be induced from properties of the square matrix For example T(0)=0 (Property 1). It is clear since A0=0
24 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation

Suppose T=nxn matrix A. Then properties of T can be induced from properties of A From Chapter 5,Section 5.5, we know that System of linear equations AX=B has unique solution X , for any given n-dim vector B, iff det(A) not zero
Hence if det(A) not zero, then T is 1-1(unique soln) and onto (has soln)
25 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation

Example: Non Singular (1-1)Transformation
So is 1-1 linear transformation
from 2-dim space onto 2-dim space
26 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
0 1det 1
1 0 −
=
0 11 0
T−
=

Suppose linear transformation T=nxn matrix A and det(A)=0
T is not 1-1 ( is singular)
Then from Chapter 5, Section 5.5, we know that system of linear equations AX=0 has infinitely many solutions X In other words, TX=0 has infinitely many solutions X Hence T maps many nonzero vectors to zero vector So T is not 1-1(is singular)
27 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation

Rank
A transformation T from 3-D to 3-D has ONLY three cases
Case1: det(T) not zero T maps 3-d space ONTO 3-d space
Case 2: det(T)=0
For this case, we say T is of rank 3
T maps 3-d space ONTO a plane For this case, we say T is of rank 2
Subcase 1
Example
28 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
2 1 11 2 10 0 0
Why? see slide 33

Subcase 2
Rank (cont.)
T maps 3-d space ONTO a line
For this case, we say T is of rank 1
Example
29 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
1 1 11 1 10 0 0
Why? See slide 34

Rank 3: det(T) non zero
no direction destroyed
Image still 3-d space
T maps 3-d space ONTO 3-d space
30 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation

Rank 2: det(T) = 0
1 direction destroyed No k direction, image is a plane
T maps 3-d space ONTO a plane
31 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
2 1 11 2 10 0 0
Example
210
Ti =
120
Tj =
110
Tk =
1 2 1 2 11 11 1 2 1 23 3
0 0 0 0 0α β
= + = +
is on the plane induced by and Tk
Ti Tj

Rank 1: det(T) = 0
2 directions destroyed
Image is a line
T maps 3-d space ONTO a line
32 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
1 1 11 1 10 0 0
Example
110
=

33 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
1 2 34 5 67 8 9
The det of this matrix is zero
It maps 3-d space ONTO a plane. why? Since the image is either a plane or a line, see two subcases. The image is not a line, so it should be a plane If it is a line then 1
47
= 𝛼258
for some α
It is not possible
Example

Rank 2: det(T) = 0
has no solution
has solution in fact infinitely
many solutions
Image is a plane
(1,2,4) not on the plane
(1,2,3) on the plane
34 Chew T S MA1506-14 Chapter 6
6.5 Properties of linear transformation
1 2 3 14 5 6 27 8 9 4
xyz
=
1 2 3 14 5 6 27 8 9 3
xyz
=
T = 1 2 34 5 67 8 9
Det T=0
Example

recall (1) if det(A)=0, then AX=0 has infinitely many solutions (2) If det(A)=0, then AX=B has two cases: AX=B has NO solution or AX=B has infinitely many solutions (Why infinitely many solutions, see next slide)
35 Chew T S MA1506-14 Chapter 6
To understand the previous example, 6.5 Properties of linear transformation

Chew T S MA1506-14 Chapter 6 36
6.5 Properties of linear transformation
If det(A)=0, then AX=0 has nonzero solution say . hX Then 0 0h hA X AXα α α= = =So if det(A)=0, then AX=0 has infinitely many nonzero solutions.
Now suppose AX=B has a solution, say pXThen pAX B=Hence
( ) 0p h p hA X X AX AX B Bα α+ = + = + =

Chew T S MA1506-14 Chapter 6 37
6.5 Properties of linear transformation
The above holds for any real number and is nonzero. So if det(A)=0 and AX=B has a solution, then it has infinitely many solutions
αhX
( ) 0p h p hA X X AX AX B Bα α+ = + = + =

Why infinitely many solutions?
38 Chew T S MA1506-14 Chapter 6
1 2 3 1 04 5 6 2 07 8 9 1 0
α − =
α any real number
6.5 Properties of linear transformation 1 2 3 14 5 6 27 8 9 3
xyz
=
1 2 3 1/ 3 14 5 6 2 / 3 27 8 9 0 3
− =
1 2 3 1 04 5 6 2 07 8 9 1 0
− =
1 2 3 1/ 3 1 14 5 6 2 / 3 2 27 8 9 0 1 3
α − + − =

We shall discuss this matrix again in T9 Q 6
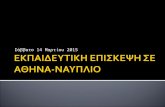
How to check that the vector [1,2,3] is on the plane, vector [1,2,4] is not on the plane ?
Chew T S MA1506-14 Chapter 6 39
1 2 34 5 67 8 9
End of Chapter 6
Recall if the plane is generated by two vectors u and v ,then (uxv).w=0 iff vector w is on the plane
u
v w uxv
6.5 Properties of linear transformation
𝑢 =𝑎11𝑎21𝑎31
𝑣 =𝑎12𝑎22𝑎32
𝑤 =𝑎13𝑎23𝑎33
𝑇 =𝑎11 𝑎12 𝑎13𝑎21 𝑎22 𝑎23𝑎31 𝑎32 𝑎33
(uxv).w=0 iff detT=0