Chapter 10 Rotational Motion and Torque. 10.1- Angular Position, Velocity and Acceleration For a...
37
Chapter 10 Rotational Motion and Torque
-
Upload
blanche-hardy -
Category
Documents
-
view
272 -
download
3
Transcript of Chapter 10 Rotational Motion and Torque. 10.1- Angular Position, Velocity and Acceleration For a...
Chapter 10
Rotational Motion and Torque
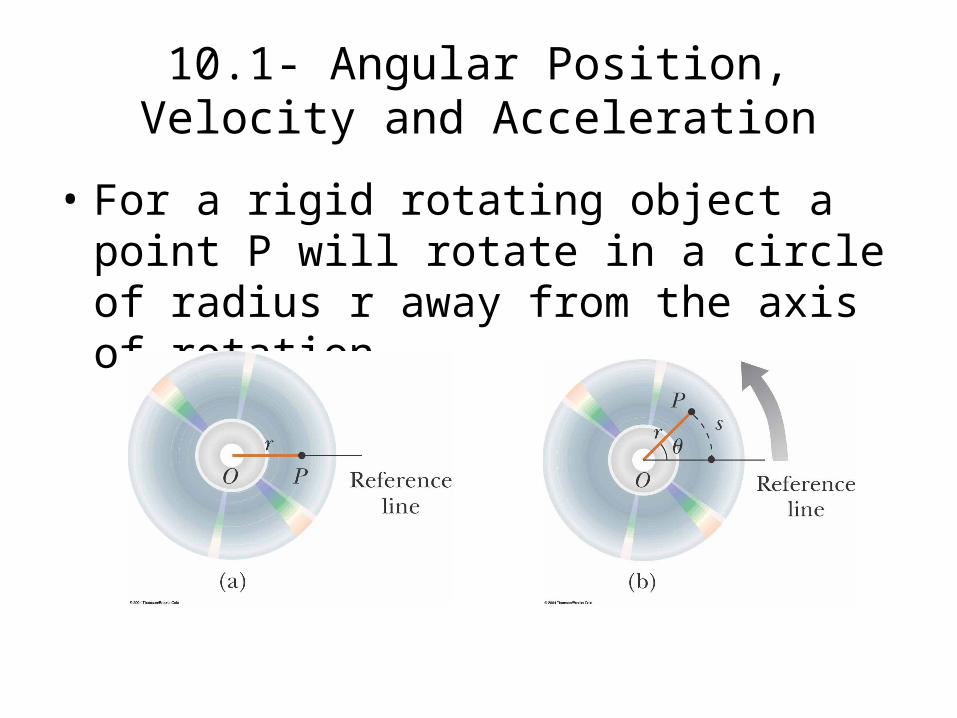
10.1- Angular Position, Velocity and Acceleration
• For a rigid rotating object a point P will rotate in a circle of radius r away from the axis of rotation.
10.1
• The location of point P can be described in polar coordinates (r , θ).
• The circular distance traveled is called the arc length according to
• When θ is measured in radians(1 radian is the angle swept by an arc length equal
to the radius).
rs
10.1
• Angles measured in radians, degrees, revolutions
2π rad = 360o = 1 rev• Angular displacement- the change in angular
position
if
10.1
• Angular Velocity- the rate of change in angular displacement– For constant rotations or averages
– For Angular Position as function of time
• Measured in rad/s or rev/s
t
dt
d
10.1
• Quick Quizzes p 294
• Angular Acceleration- the rate of change of angular velocity
ort
dt
d

10.1
• Angular Velocity/Acceleration Vector Directions- Right Hand Rule
• Generally CCW is positive, CW is negative
• Acceleration direction Points the same direction asω, if ω is increasing, antiparallel if ω decreases
10.1
Quick Quiz p. 296
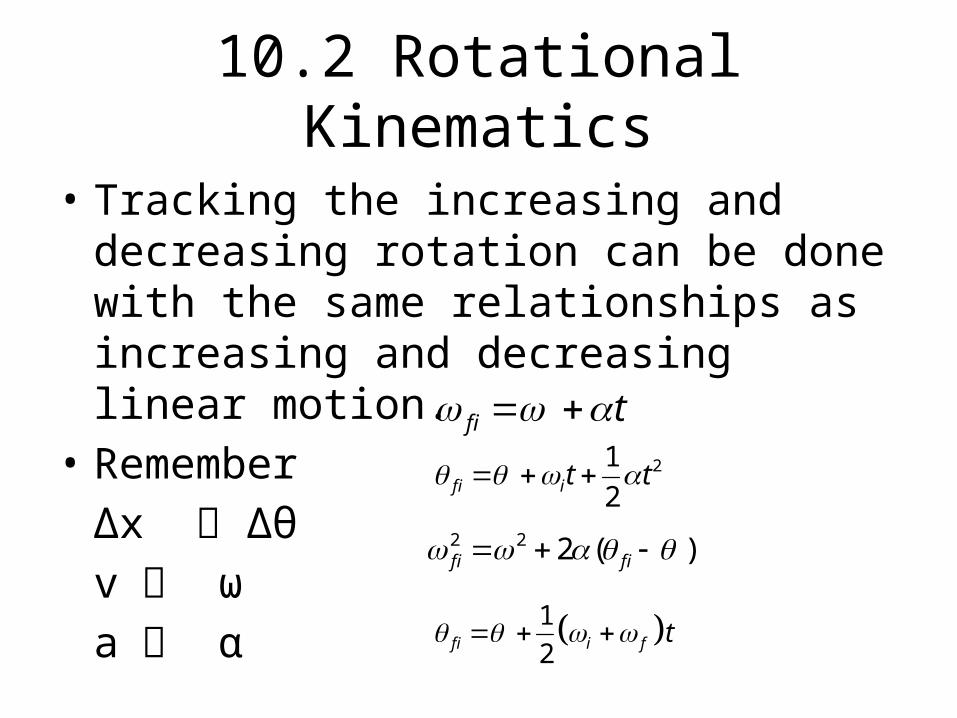
10.2 Rotational Kinematics
• Tracking the increasing and decreasing rotation can be done with the same relationships as increasing and decreasing linear motion.
• RememberΔx Δθv ωa α
f i t 21
2f i it t
2 2 2 ( )f i f i
1
2f i i f t
10.2
• Quick Quiz p. 297• Example 10.1
10.3 Angular and Linear Quantities
• When an object rotates on any axis, every particle in that object travels in a circle of constant radius (distance from axis)
• The motion of each point can be described linearly about the circular path
• Tangential Velocity-
dt
dr
dt
dsv
rv
10.3
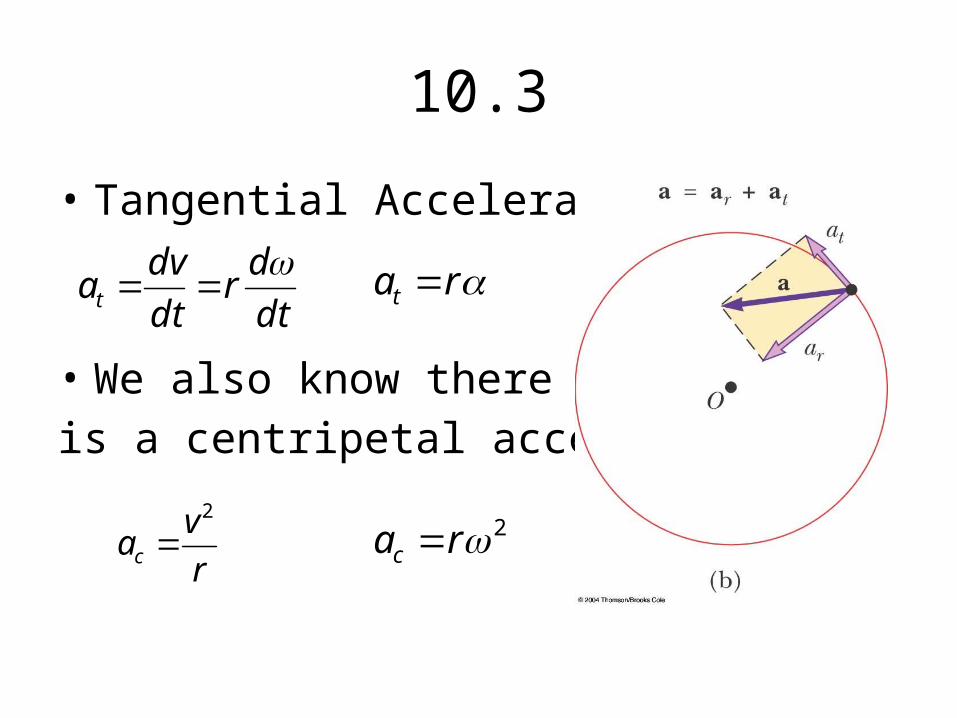
• Tangential Acceleration-
• We also know there is a centripetal acceleration
dt
dr
dt
dvat
rat
r
vac
2
2rac
10.3
• The resultant acceleration-
• Quick Quizzes p. 298• Examples 10.2
42422222 rrraaa rt
10.4
• Rotational Kinetic Energy- the kinetic energy of a single particle in a rotating object is…
• The Total Kinetic Energy would be the sum of all Ki
• Which can be rewritten...
22212
21 rmvmK iiii
2221 ii
ii
iR rmKK
2221 ii
iR rmK
10.4
• This is a new term we will call Moment of Inertia
• Moment of Inertia has Dimensions ML2 and units kg.m2
(~ rotational counterpart to mass)• Rotational Kinetic Energy-
2ii
irmI
221 IKR
10.4
• Quick Quiz p. 301• Examples 10.3, 10.4
10.5 Calculating Moments of Inertia
• We can evaluate the moment of inertia of an extended object by adding up the M.o.I. for an infinite number of small particles.
dmrmrI iiimi
22
0lim
10.5
• Its generally easier to calculate based on the volume of elements rather than mass so using
for small elements….
• We have…
• If ρ is constant, the integral can be completed based on the geometric shape of the object.
V
m
dVdm
dVrI 2
10.5
• Volumetric Density- ρ (mass per unit volume)• Surface Mass Density- σ (mass per unit area)– (Sheet of uniform thickness (t) σ = ρt)
• Linear Mass Density- λ (mass per unit length)– (Rod of uniform cross sectional area (A)
λ = M/L = ρA)
See Board Diagrams
10.5
• Example 10.5-10.7
• Common M.o.I. for high symmetry shapes (p. 304)
• Parallel Axis Theorem
2MDII CM
10.5
• Example 10.8
10.6 Torque
• Torque- the tendency of a force to cause rotation about an axis
• Where r is the distance from the axis of rotation and Fsinφ is the perpendicular component of the force
• Where F is the force and d is the “moment arm.”
sinFr
dF
10.6
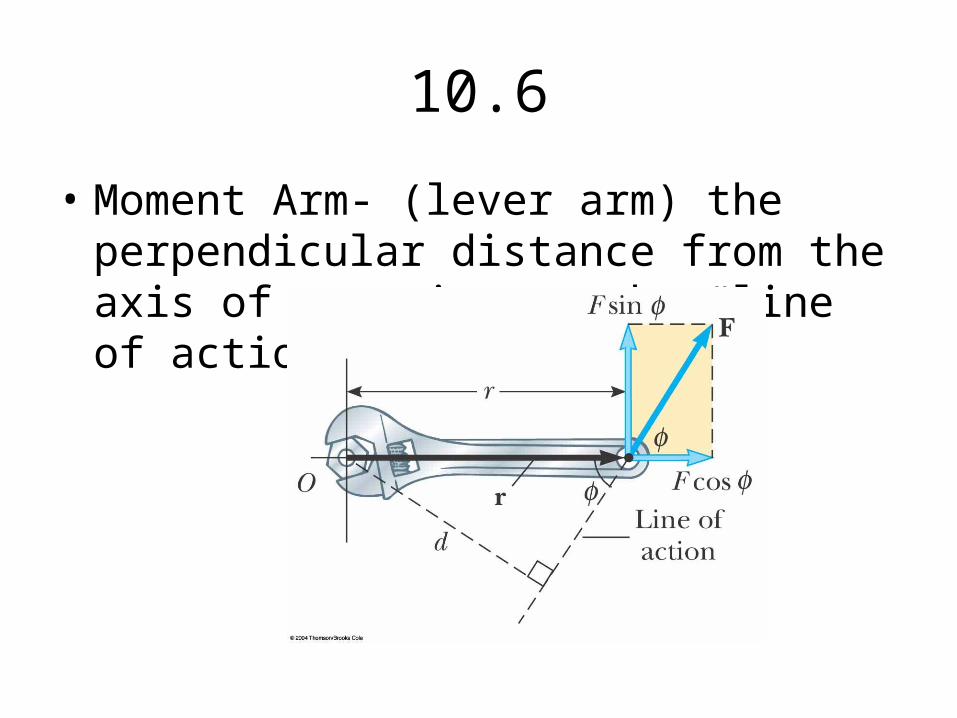
• Moment Arm- (lever arm) the perpendicular distance from the axis of rotation to the “line of action”
10.6
• Torque is a vector has dimensions ML2T-2 which are the same as work, units will also be N.m
• Even though they have the same dimensions and units, they are two very different concepts.
• Work is a scalar product of two vectors• Torque is a vector product of two vectors
10.6
• The direction of the torque vector follows the right hand rule for rotation, and CCW torques will be considered positive, CW torques negative.
• Quick Quizzes p. 307• Example 10.9
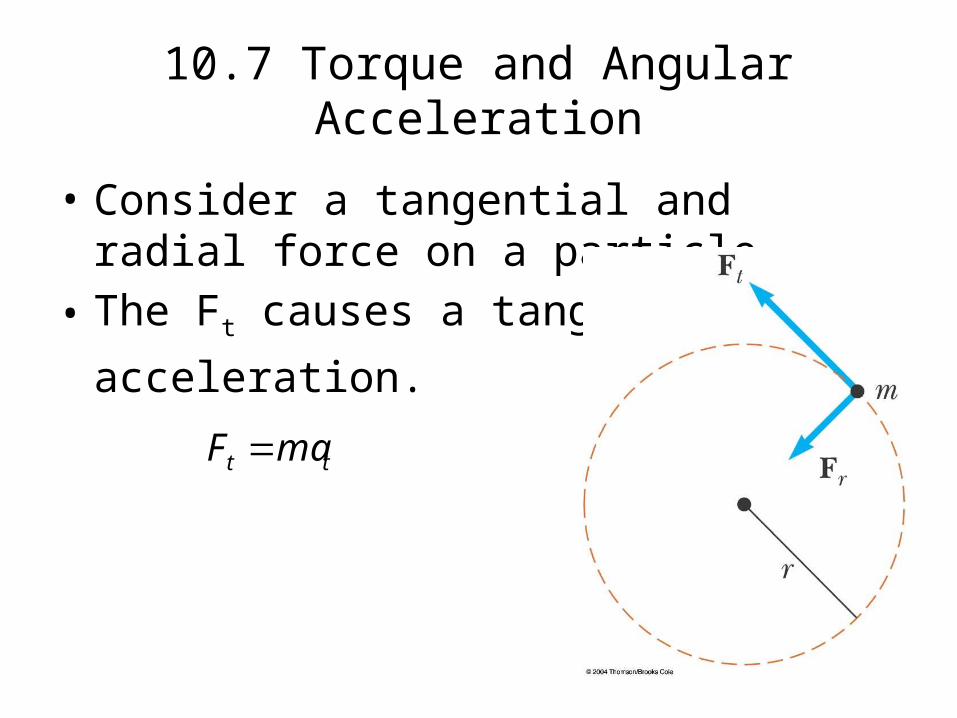
10.7 Torque and Angular Acceleration
• Consider a tangential and radial force on a particle.
• The Ft causes a tangential
acceleration.
tt maF
10.7
• We can also look at the torque caused by the tangential force.
• And since…
rmarF tt )(
rat
)( 2mr
I
10.7
• Newton’s 2nd Law (Rotational Analog)
• Quick Quiz p. 309• Review Examples 10.10-10.13
I
10.8 Work, Power, and Energy
• Rotational Analogs for Work, Power, and Energy– Work
– Energy
– Work-KE Theorem
– Power
W
221 IKr
2212
21
if IIW
dt
dW
t
KP r
10.8
• Quick Quiz p. 314• Examples 10.14, 10.15
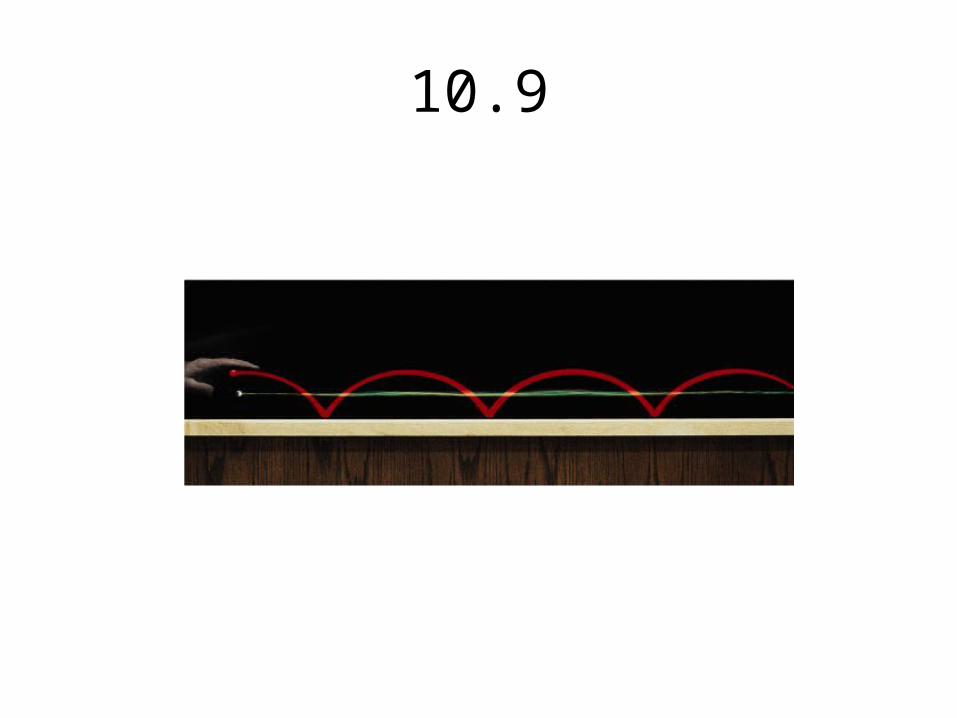
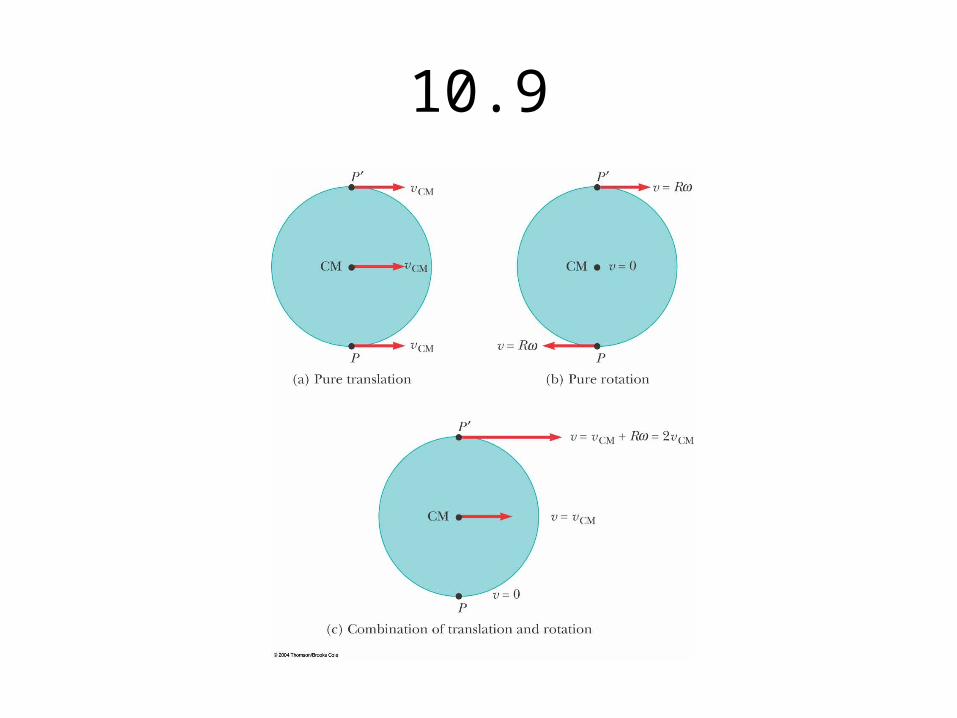
10.9 Rolling Motion
• For an object rolling in a straight line path the translational motion of its center of mass can be related to its angular displacment, velocity and acceleration.
• Condition for Pure Rolling Motion- no slipping– If there is no slip, then every point on the outside
of the wheel contacts the ground and following relationships hold.
10.9
10.9
10.9
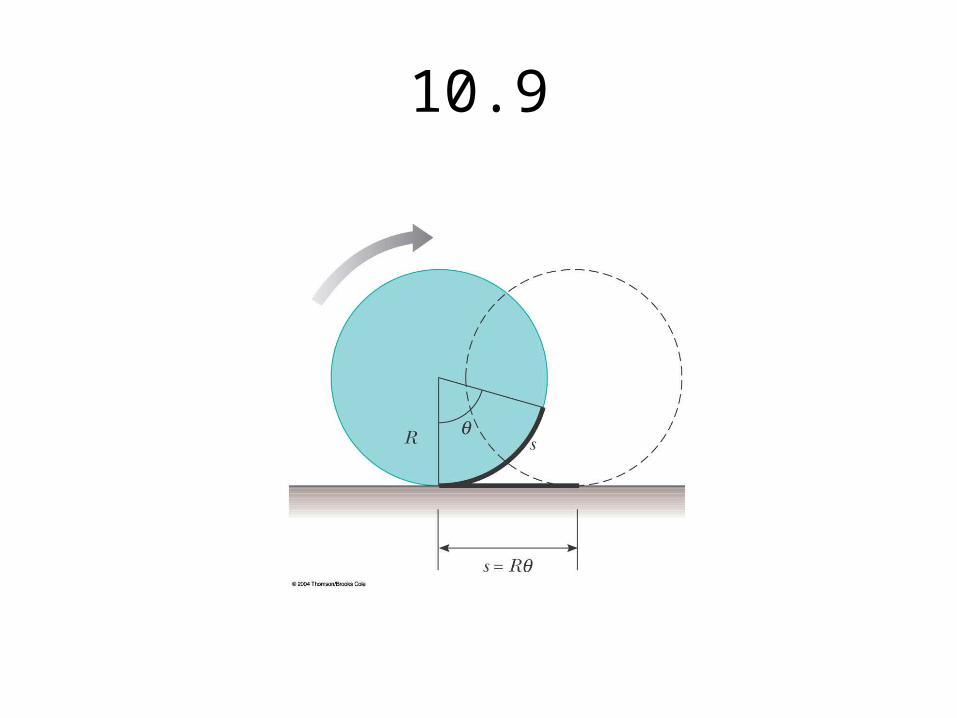
• Linear distance traveled (translational displacment)-
• CofM Velocity (trans. vel.)-
• CofM Accel. (trans. accel.)-
Rs
R
dt
dR
dt
dsvCM
R
dt
dR
dt
dva CMCM
10.9
10.9
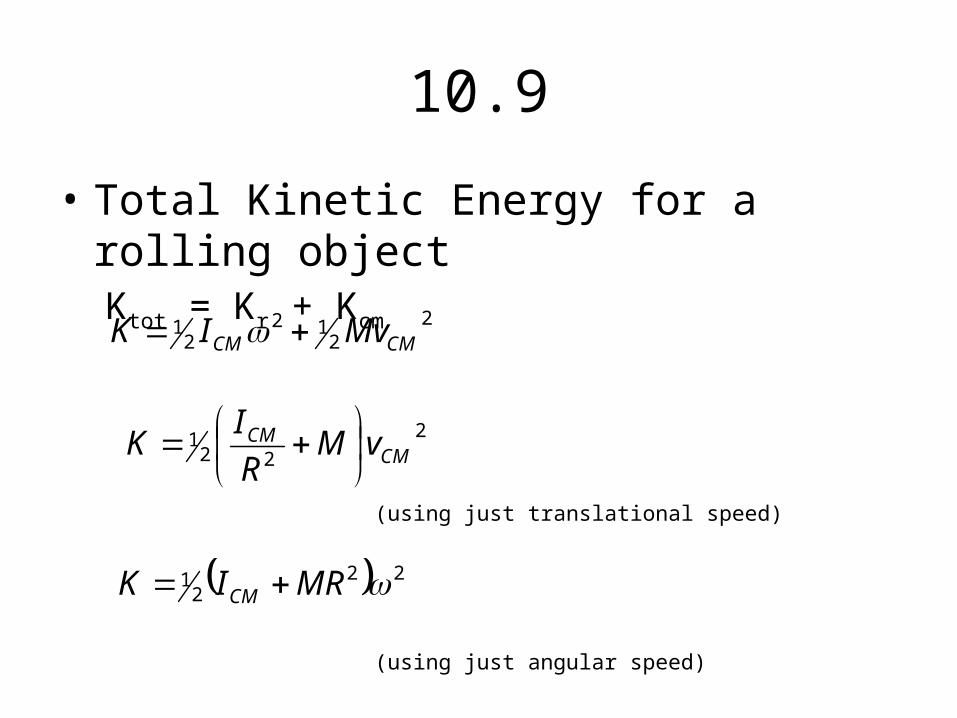
• Total Kinetic Energy for a rolling objectKtot = Kr + Kcm
(using just translational speed)
(using just angular speed)
2212
21
CMCM MvIK
2
221
CMCM vMR
IK
2221 MRIK CM
10.9
• Friction must be present to give the torque causing rotation, but does not cause a loss of energy because the point of contact does not slide on the surface.
• With zero friction the object would slide, not roll.
Quick Quizzes p. 319Example 10.16