Chapter 04
59
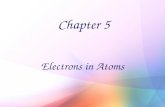
Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 1 SOLUTIONS TO CHAPTER 4 PROBLEMS Problem 4.1 Figure P4.1 sketches an angular potentiometer. It is formed of a circular resistor defined by a radius r and total length l calculated in terms of the center angle α (not shown in the figure) as l r = α (P4.1) A wiper moves along a conductive circular guide, which is concentric with the resistor. Figure P4.1 Angular potentiometer The voltage generated by the source v is, according to Ohm’s law: l r v Ri i i A A = = = ρ ρα (P4.2) where R is the total resistance of the circular wire, ρ is the resistivity, and A is the wire cross-sectional area. The rotary-motion wiper encloses a circuit defined by a center angle θ whose voltage (measured by a meter for instance) is l r v Ri i i A A = = = θ θ θ ρ ρθ (P4.3) Combination of Eqs. (P4.2) and (P4.3) results in: R v v v R = = θ θ θ α (P4.4) i v wiper vθ + – conductive guide meter voltage source resistor r θ
-
Upload
westlyc123 -
Category
Documents
-
view
59 -
download
0
Transcript of Chapter 04

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 1
SOLUTIONS TO CHAPTER 4 PROBLEMS Problem 4.1
Figure P4.1 sketches an angular potentiometer. It is formed of a circular resistor
defined by a radius r and total length l calculated in terms of the center angle α (not
shown in the figure) as
l r= α (P4.1)
A wiper moves along a conductive circular guide, which is concentric with the resistor.
Figure P4.1 Angular potentiometer
The voltage generated by the source v is, according to Ohm’s law:
l rv Ri i iA A
= = =ρ ρ α (P4.2)
where R is the total resistance of the circular wire, ρ is the resistivity, and A is the wire
cross-sectional area. The rotary-motion wiper encloses a circuit defined by a center angle
θ whose voltage (measured by a meter for instance) is
l rv R i i iA A
= = =θθ θ
ρ ρ θ (P4.3)
Combination of Eqs. (P4.2) and (P4.3) results in:
R vv vR
= =θθ θ
α (P4.4)
i
v
wiper vθ
+
–
conductive guide
meter
voltage source
resistor
r θ

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 2
For v and α being constant, Eq. (P4.4) indicates that the angular displacement angle θ is
proportional to the voltage measured by the meter, vθ.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 3
Problem 4.2
If the 5 resistors, each having a resistance R, are combined in series, the equivalent
resistance would be 5R, which is the maximum value of all possible combinations;
similarly, if the resistors are combined in parallel, the equivalent resistance would be R/5,
which is the minimum value of all possible combinations. However, any combination
needs to have both series and parallel connections. It thus appear that the design of Fig.
P4.1(a) generates the maximum equivalent resistance because it comprises three resistors
in series, whereas the combination of Fig. P4.1(b) yields the minimum equivalent
resistance as it contains four resistors in parallel.
Figure P4.1 Resistor connections for: (a) maximum equivalent resistance; (b) minimum equivalent
resistance
The combination of Fig. P4.1(a) results in the following equivalent resistance:
max73
2 2RR R R= + = × (P4.1)
and the arrangement of Fig. P4.1(b) yields a minimum resistance calculated as:
min5
4 4RR R R= + = × (P4.2)
It can be checked that no other combination of 5 identical resistors is able to result in an
equivalent resistance outside the [5R/4, 7R/2] range; therefore, indeed, Eqs. (P4.1) and
(P4.2) give the extreme equivalent resistances. For R = 120 Ω, the extreme values are
Rmax = 420 Ω and Rmin = 150 Ω.
(a) (b)
R R R
R
R
R
R R
R
R

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 4
Problem 4.3
To calculate the equivalent resistance between nodes c and d, the resistances of the
triangle a-b-c of Fig. 4.38 are transformed into the ones corresponding to a reversed Y-
connection, as shown in Fig. P4.1(a), which is further simplified to the circuit of Fig.
P4.1(b).
Figure P4.1 Intermediate resistor connections for equivalent resistance between nodes c and d
As a consequence, the sought resistance is calculated as
125 34514
125 345cd
R RR RR R
= ++
(P4.1)
where
125 15 2
345 45 3
R R RR R R
= + = +
(P4.2)
and
1 414
1 4 5
4 545
1 4 5
1 515
1 4 5
R RRR R R
R RRR R R
R RRR R R
= + +
= + +
=
+ +
(P4.3)
Substitution of Eq. (P4.3) in Eq. (P4.2) and then in Eq. (P4.1) yields
( ) ( ) ( )
( ) ( )( )1 2 3 4 3 4 5 4 5 2 3 4 5 4 5
1 2 3 5 2 3 4 5 4 5cd
R R R R R R R R R R R R R R RR
R R R R R R R R R R+ + + + + + + =
+ + + + + + (P4.4)
Numerically, the equivalent resistance is Rcd = 194.3 Ω.
(a) (b)
c R14
R15
R45
R2
R3
d
R125
R345
R14 c d

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 5
Figure P4.2 shows the connections of the resistances between nodes a and b. It
follows that:
2 3 5 1 4
1 1 1 1
abR R R R R R= + +
+ + (P4.5)
which yields:
( )( )( ) ( )( )
5 1 4 2 3
1 2 3 5 2 3 4 5 4 5ab
R R R R RR
R R R R R R R R R R+ +
=+ + + + + +
(P4.6)
whose numeric value is Rab = 78 Ω.
Figure P4.2 Intermediate resistor connections for equivalent resistance between nodes a and b
R2
R4 R1
a b
R3
R5

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 6
Problem 4.4
The circuit of Fig. P4.1 shows the resistance arrangement after performing the
conversion from triangle in a reversed-Y connection in the original Fig. 4.39.
Figure P4.1 Resistor connections after conversion from triangle to reversed-Y connection
The resistance between nodes a and b is calculated as
( )( )13 4 23 512 6
13 4 23 5ab
R R R RR R R
R R R R+ +
= + ++ + +
(P4.1)
with
1 212
1 2 3
2 323
1 2 3
1 313
1 2 3
R RRR R R
R RRR R R
R RRR R R
= + +
=+ +
=
+ +
(P4.2)
Substituting Eqs. (P4.2) in Eq. (P4.1) yields
( ) ( )
( ) ( ) ( )( )1 3 4 1 2 3 2 3 5 1 2 31 2
61 2 3 1 2 3 3 1 2 4 5 1 2 3
ab
R R R R R R R R R R R RR RR RR R R R R R R R R R R R R R
+ + + + + + = + ++ + + + + + + + +
(P4.3)
and its numerical value is Rab = 62.6 Ω.
R13
R5 R23
R4
R12 R6 a b

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 7
Problem 4.5
As demonstrated in the website Chapter 4, the following equations need to be solved
to determine the capacitances that form a reversed-Y connection, and which are C14, C15,
C45 in terms of the capacitances of the original Δ connections, and which are C1, C4, C5
(as indicated in Fig. P4.1):
14 151
14 15
14 452
14 45
45 153
45 15
C C fC CC C f
C CC C f
C C
= +
= +
=
+
(P4.1)
where
4 51 1
4 5
1 54 2
1 5
1 45 3
1 4
37.14
43.33
52
C CC fC C
C CC fC CC CC f
C C
+ = = +
+ = = +
+ = =
+
(P4.2)
Figure P4.1 Partial capacitance circuits for the circuit of Fig. 4.40: (a) original Δ connection; (b)
equivalent reversed-Y connection
The solution to Eqs. (P4.1) is:
C1
C5
C4
C15
C14 C45
(a) (b)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 8
1 2 314
1 2 2 3 3 1
1 2 315
1 2 2 3 3 1
1 2 345
1 2 2 3 3 1
2 65
2 86.67
2 130
f f fCf f f f f f
f f fCf f f f f f
f f fCf f f f f f
= = − + +
= = + −
= =
− +
(P4.3)
The capacitance values in Eqs. (P4.2) and (P4.3) are expressed in μF.
Figure P4.2 Simplifying sequence for capacitance circuit
As shown in Fig. P4.2, the capacitance between nodes a and b is:
( )14 125 345
14 125 345ab
C C CC
C C C+
=+ +
(P4.4)
with
15 2 45 3125 345
15 2 45 3
;C C C CC CC C C C
= =+ +
(P4.5)
With the numerical values of the problem, the following capacitance values are obtained:
C125 = 16.25 μF, C345 = 13.45 μF, and Cab = 20.38 μF.
a
C2
C14
C15
C3 C45
b a
C14
C125
C345
b

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 9
Problem 4.6
Figure P4.1 shows the electrostatic forces f1 and f2 applied to the mobile plate pair by
the fixed middle plate after a displacement x occurred.
Figure P4.1 MEMS capacitive actuator with transverse displacement
According to Eq. (4.22), the two forces are:
2 2
1 22 2;2 2
2 2
Av Avf fd dx x
= = − +
ε ε (P4.1)
The net force acting on the mobile plate pair is their difference, namely:
( ) ( )
21 2 2 216
2 2xf f f Adv
d x d x= − =
− +ε (P4.2)
Figure P4.2 illustrates the nonlinear variation of the net force f as a function of the mobile
plates displacement x. The displacement was limited to x = 2 μm when the force reached
approximately 5.5 x 10-17 N.
The minimum gap occurs for
2 500d dx− = (P4.3)
condition which yields x = (249/500)d = 2.49 μm. Using this particular value in Eq.
(P4.2) results in a force of f = 1.408 x 10-13 N. It can be seen that an increase of 0.49 μm
in displacement from the threshold value of 2 μm, which was used in the plot, generates
an increase of 2,560 times in the maximum force.
motion
f1
f2
d/2 - x
d/2 + x
x

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 10
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-6
0
1
2
3
4
5
6x 10
-17
x (m)
f (N
)
Figure P4.2 Net force acting on mobile plates as a function of displacement

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 11
Problem 4.7
The transverse and longitudinal voltages that are picked up transversely and
longitudinally by capacitive sensing are given in Eqs. (4.30) and (4.36) as
0 0
;bt l b
v xv x v vg x x
∆∆ = − ×∆ ∆ = − ×
+ ∆ (P4.1)
The ratio of these two voltages is
0 0
0 0 0
1t
l
v x x x xv g g g
∆ + ∆= = + ×∆
∆ (P4.2)
The relative voltage variation ratio of Eq. (P4.2) can be regarded as a function of Δx
provided x0 and g0 are constant. As such, it can be seen that Δvt = Δvl when Δx = g0 − x0.
The y-axis intercept of the voltage ratio plot is x0/g0, as given in Eq. (P4.2) and shown in
Fig. P4.1.
Figure P4.1 Voltage variation ratio as a function of plate displacement
As a consequence, when x0 ≥ g0 (which means x0/g0 ≥ 1) the transverse sensing is more
sensitive than longitudinal sensing because Δvt/ Δvl ≥ 1. When x0 < g0, there are two
situations possible, namely: for Δx ≤ g0 − x0 it follows that Δvt < Δvl and therefore the
transverse procedure is less sensitive than the longitudinal method; on the other hand, for
Δx > g0 − x0, as seen in Fig. P4.1, Δvt > Δvl indicating that transverse sensing is
preferable to longitudinal sensing.
Δvt/Δvl
Δx
x0/g0
g0 - x0
1

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 12
Problem 4.8
The transverse and longitudinal voltage variations are expressed in Eqs. (4.30) and
(4.36) as:
0
0
bt t
ll b
l
vv xg
xv vx x
∆ = − ×∆ ∆∆ = − × + ∆
(P4.1)
From the first Eq. (P4.1), the longitudinal displacement is
0t t
b
gx vv
∆ = − ×∆ (P4.2)
and its numerical value is Δxt = 4 μm. The longitudinal displacement is expressed from
the second Eq. (P4.1) as
0 ll
b l
x vxv v
∆∆ = −
+ ∆ (P4.3)
which yields a numerical value of Δxl = 3.18 μm. It can be seen that Δxt ≠ Δxl due to
imprecision in measuring by the longitudinal capacitive unit. Checking Eq. (P4.3)
indicates that the sources of imprecision in Δxl are unreliable determination of either of
x0, vb or Δvl.
Assuming x0 was assessed erroneously, Eq. (P4.3) yields:
'0
b tt
t
v vx xv+ ∆
= − ∆∆
(P4.4)
where the transverse displacement has been used instead of the longitudinal one. The
absolute value of '0x from Eq. (P4.4) is 44 μm.
Another variant is that the bias voltage was not assessed correctly, but from Eq.
(P4.3), the correct bias voltage is
' 0 lb l
t
x vv vx∆
= − −∆∆
(P4.5)
and its absolute value is 1.95 μV. Note that transverse displacement has been used in Eq.
(P4.5) as the precise measurement.
Eventually, in case the longitudinal voltage has not been detected precisely, its
correct equation is found by expressing it from Eq. (P4.3)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 13
'
0
b tl
t
v xvx x
∆∆ = −
+ ∆ (P4.6)
(where, again, transverse displacement has been used instead of longitudinal
displacement) and its absolute value is 0.2 μV.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 14
Problem 4.9
The transverse and longitudinal capacitive forces are given in Eqs. (4.22) and (4.32)
as
( )
2 2 2
200
;22t l
w v wvf fgg x
= =−
ε ε (P4.1)
where w is the side length of the square capacitive plates. Using the problem specific
relationships
010;3
t
l
f gxf= = (P4.2)
in conjunction with Eq. (P4.1) results in
0940
g w= × (P4.3)
For w = 80 μm, Eq. (P4.3) yields g0 = 18 μm.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 15
Problem 4.10
The same equivalent inductance needs to be between any two of the vertices A, B,
and C for both the Δ connection and the reversed-Y connection of Fig. 4.43. Considering
the nodes A and B in the Δ connection, it is seen that LAB is in parallel with the series
connection of LCA and LBC; similarly, in the reversed-Y connection, LAD and LBD are in
series between nodes A and B; taking into consideration Eqs. (4.45) of the series and
parallel connection of impedances, the above-mentioned equality is written as
( )AB CA BCAD BD
AB CA BC
L L LL L
L L L+
= ++ +
(P4.1)
The following similar equations are formulated with respect to the node pairs B-C and
C-A:
( )
( )
BC AB CABD CD
BC AB CA
CA BC ABCD AD
CA BC AB
L L LL L
L L LL L L
L LL L L
+= + + +
+ = + + +
(P4.2)
Equations (P4.1) and (P4.2) form a system of three equations with three unknowns: the
inductances LAD, LBD and LCD. This system is written as:
( )
( )
( )
1 1 00 1 11 0 1
AB CA BC
AB CA BCAD
BC AB CABD
BC AB CACD
CA BC AB
CA BC AB
L L LL L L
LL L L
LL L L
LL L LL L L
+ + + + = + + +
+ +
(P4.3)
and its solution is obtained in MATLAB® by solving the following vector-matrix
equation using
( )
( )
( )
11 1 00 1 11 0 1
AB CA BC
AB CA BCAD
BC AB CABD
BC AB CACD
CA BC AB
CA BC AB
L L LL L L
LL L L
LL L L
LL L LL L L
−
+ + + + = + + +
+ +
(P4.4)
The result is:

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 16
AB CAAD
AB BC CA
BC ABBD
AB BC CA
CA BCCD
AB BC CA
L LLL L L
L LLL L L
L LLL L L
= + +
= + +
=
+ +
(P4.5)
With the numerical values of the problem, the impedances of Eqs. (P4.5) are: LAD = 22.4
mH, LBD = 32 mH, and LCD = 28 mH.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 17
Problem 4.11
Any of the electrical circuits shown in Fig. P4.1 contains five internal rectangles,
which are not divided into any other fragments, and therefore, each of these circuits has
5 meshes inscribed within the same rectangular area and therefore, 5 degrees of freedom.
Figure P4.1 Circuit configurations with 5 meshes
A loop is formed of any mesh combination on condition that component meshes are
adjacent (they share at least one branch) but individual meshes also count as loops. As
such, the circuit shown in Fig. P4.1(a) is formed of 15 loops, as follows: 5 small
rectangles (the meshes), 4 rectangles each comprising two adjacent small rectangles, 3
rectangles formed of three adjacent small rectangles, 2 rectangles determined by four
adjacent small rectangles, and 1 rectangle formed of the five small rectangles.
Following a similar reasoning, the circuit of Fig. P4.1(b) contains 5 meshes, 7 areas
each formed of two adjacent rectangles (meshes), 8 areas comprising each three adjacent
rectangles, 4 areas comprising 4 adjacent rectangles, and 1 area with all five meshes –
the total number of loops is therefore 25.
Eventually, the circuit sketched in Fig. P4.1(c) is formed of 5 + 6 + 7 + 5 + 1 = 24
loops. Consider that each independent branch (circuit line between two different meshes)
has its own current passing through it. There are 11 branches in this circuit (you are
encouraged to detect them), and therefore, 11 currents through them. Assuming voltage
sources (for instance) and resistances are known, 6 nodes out of the total number of 7
nodes provide 6 constraint equation between the 11 currents (the last node, the seventh,
duplicates the equation of another node). As a consequence, the number of independent
(a) (b) (c)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 18
parameters defining the electrical system is 11 – 6 = 5. It follows that the electrical
system has 5 DOF, and 5 currents (for instance) can be these degrees of freedom.
Let us design a circuit like the one of Fig. P4.1(c) with 6 resistors, one voltage source
and defined by 5 DOF such as the circuit of Fig. P4.2. If we consider the currents
already indicated in the figure based on Kirchhoff’s node law, it can be seen that the 5
currents: i (in the voltage source branch), i1, i3, i4, and i6 can be the system’s DOF. Note
that the assumption of a current in the source branch is consistent with a real voltage
source having an internal resistance. Ignoring this current (i = 0) would result in only 4
currents being necessary to describe of the system and therefore, the number of DOF
would be 4.
Figure P4.2 Circuit configuration with 5 meshes, resistors and a voltage source
i1 i1 + i3 i3
i4 i6
R1
+ – v
R2
R4 R5 R3
R6
i
i – i1
i – i1 – i4
i – i1 – i4 – i6
i4 + i6 – i3
A
B

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 19
Problem 4.12
(a)
The nodes and currents are shown in Fig. P4.1. According to the rule of thumb, this
electrical system has four meshes and therefore it needs 4 DOF. Indeed, the total number
of branch currents is 11; there are also 8 nodes, out of which only 7 provide independent
relationships between branch currents (by means of Kirchhoff’s node law), which means
there are 7 constraints. As a consequence, the number of DOF or the system
configuration is 11 – 7 = 4, as also determined by the rule-of-thumb reasoning.
Figure P4.1 Currents and nodes in a 4-mesh electrical circuit
(b)
The following current equations are written for the nodes A, B and C based on Fig.
P4.1:
1 2
2 3 4
3 5 6
ii i ii i ii i i
= + = + = +
(P4.1)
At node D, the following equation applies:
1 4 6 7oi i i i= + − (P4.2)
Similar equations are found for nodes E, F, and G:
5 8 9
10 7 9
11 1 8
i i ii i ii i i
= + = + = +
(P4.3)
whereas for node H, the current equation applies:
io2
ii
io1
i1
i3 i5 i8
i4 i6 i9 i11
i7 i10
A
B
C E
D F H
G
i2

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 20
2 10 11oi i i= + (P4.4)
Combining the last two Eqs. (P4.3) with Eq. (P4.4) yields:
2 7 9 1 8oi i i i i= + + + (P4.5)
Adding now Eqs. (P4.2) and (P4.5) results in
1 2 1 4 6 8 9o oi i i i i i i+ = + + + + (P4.6)
Using the first Eq. (P4.3) and Eqs. (P4.1), transform Eq. (P4.6) to:
1 2 1 4 6 5 1 4 3 1 2o o ii i i i i i i i i i i i+ = + + + = + + = + = (P4.7)
which demonstrates that that the current entering the electrical system is equal to the
sum of currents exiting the system, as expected.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 21
Problem 4.13
The series connection of any number of identical inductors yields the maximum
equivalent inductance, while their parallel connection generates the minimum equivalent
inductance. Conversely, identical capacitors have to be connected in parallel to produce
the maximum equivalent capacitance, and in series to obtain the minimum equivalent
capacitance. It is also known that inductances and capacitances enter the denominator of
the natural frequency. As a consequence, the electrical circuit of Fig. P4.1(a), which
yields the minimum equivalent inductance and capacitance, generates the maximum
natural frequency, whereas the electrical circuit of Fig. P4.1(b), with inductors in series
and capacitors in parallel, results in the minimum natural frequency.
Figure P4.1 Circuits with inductors and capacitors for: (a) maximum natural frequency; (b) minimum
natural frequency
The equivalent inductance and capacitance for the circuit of Fig. P4.1(a) are:
,min
,min
3
2
e
e
LL
CC
= =
(P4.1)
which leads to the natural frequency
,max,min ,min
1 6n
e eL C LC= =ω (P4.2)
The equivalent inductance and capacitance for the circuit of Fig. P4.1(b) are:
,max
,max
32
e
e
L LC C
= =
(P4.3)
which leads to the natural frequency
L
L
C C
L
C
C
L L L
(a) (b)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 22
,min,max ,max
1 16n
e eL C LC= =
×ω (P4.4)
The ratio of the natural frequencies of Eqs. (P4.2) and (P4.4) is
,max
,min
6n
n
=ωω
(P4.5)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 23
Problem 4.14
Figure P4.1 shows the original circuit with charges on the three branches.
Figure P4.1 Two-mesh electrical circuit with charges
The total electrical energy corresponding to the inductors and capacitors is:
( ) ( )2 22 21 1 2 2 1 2
1 1 1 12 2 2 2
E Lq L q q q q qC C
= + − + + − (P4.1)
The electrical system being conservative, the time derivative of the total energy of Eq.
(P4.1) needs to be zero, which yields:
1 1 1 2 1 2 2 1 2 2 1 21 1 1 1 1 0q Lq Lq Lq q q q Lq Lq q q qC C C C C
+ − + − + − + + − + = (P4.2)
Because the charge rates (currents) cannot e zero at all times, Eq. (P4.2) is satisfied
when its two parentheses are simultaneously zero:
1 2 1 2
1 2 1 2
1 12 0
1 2 0
Lq Lq q qC C
Lq Lq q qC C
− + − =− + − + =
(P4.3)
Solution of the sinusoidal type:
( )( )
1 1
2 2
sin
sin
q Q t
q Q t
=
=
ω
ω (P4.4)
is needed in Eq. (P4.3), which yields:
2 21 2
2 21 2
1 12 0
1 2 0
L Q L QC C
L Q L QC C
− + + − = − + − + =
ω ω
ω ω (P4.5)
C L
L
C
q1 q2
q1 – q2

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 24
Equations (P4.5) have nontrivial solution when the determinant of the system is zero,
namely:
2 2
2 2
1 120
1 2
L LC C
L LC C
− + −=
− − +
ω ω
ω ω (P4.6)
Equation (P4.6) has the following roots, which are the electrical system’s natural
frequencies:
,1
,2
3 52
3 52
n
n
LC
LC
− = +
=
ω
ω
(P4.7)
The ratio of the two natural frequencies of Eqs. (P4.7) is:
,2
,1
3 5 2.6183 5
n
n
+= =
−
ωω
(P4.8)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 25
Problem 4.15
Figure P4.1 shows the original circuit with charges on the three branches.
Figure P4.1 Two-mesh electrical circuit with charges
The total energy corresponding to the four electrical components is
( )22 2 21 1 2 1 1 2 2
1 2
1 1 1 12 2 2 2
E q q q L q L qC C
= + − + + (P4.1)
The electrical system is conservative and the energy time derivative is zero, which yields
1 1 1 1 2 1 2 2 1 2 21 2 2 2 2
1 1 1 1 1 0L q q q q q L q q q qC C C C C
+ + − + − + =
(P4.2)
Equation (P4.2) is valid at all times when
1 1 1 2
1 2 2
2 2 1 22 2
1 1 1 0
1 1 0
L q q qC C C
L q q qC C
+ + − =
− + =
(P4.3)
Sinusoidal solution of the form
( )( )
1 1
2 2
sin
sin
q Q t
q Q t
=
=
ω
ω (P4.4)
is needed, which, substituted in Eq. (P4.3) leads to
21 1 2
1 2 2
21 2 2
2 2
1 1 1 0
1 1 0
L Q QC C C
Q L QC C
− + + − =
− + − + =
ω
ω
(P4.5)
Equations (P4.5) have nonzero Q1 and Q2 solutions for
C1 L2
L1
C2
q1 q2
q1 – q2

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 26
21
1 2 2
22
2 2
1 1 1
01 1
LC C C
LC C
− + + −
=− − +
ω
ω (P4.6)
which is the characteristic equation. For the numerical parameters of this problem, its
roots (the natural frequencies) are ωn1 = 115.79 rad/s and ωn2 = 333.16 rad/s.
The second Eq. (P4.5) gives the amplitude ratio
212 2
2
1Q L CQ
= −ω (P4.7)
For ω = ωn1, the ratio of Eq. (P4.7) becomes
1
(1)1 1
(1)2 2
0.5495n
Q QQ Q
=
= =ω ω
(P4.8)
Equation (P4.8) shows that the charges have either the directions chosen in Fig. P4.1 or
directions opposite to the ones shown in Fig. P4.1; the same equation indicates that the
amplitude of q1 is smaller than the amplitude of q2. The eigenvector is of unit-norm for
( ) ( )2 2(1) (1)1 2 1Q Q+ = (P4.9)
Solving Eqs. (P4.8) and (P4.9) for the two amplitudes results in the following
eigenvector corresponding to ω = ωn1
{ }(1) 0.48160.8764
Q =
(P4.10)
For ω = ωn2, the ratio of Eq. (P4.7) becomes
2
(2)1 1
(2)2 2
2.7295n
Q QQ Q
=
= = −ω ω
(P4.11)
which shows that the directions of the two charges in the circuit of Fig. P4.1 are opposite
(either q1 or q2 opposes the direction in the figure) and that the amplitude of q1 is larger
than the amplitude of q2. For a unit-norm eigenvector it is necessary that
( ) ( )2 2(2) (2)1 2 1Q Q+ = (P4.12)
Solving Eqs. (P4.11) and (P4.12) for the unknown amplitudes generates the eigenvector
related to ω = ωn2

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 27
{ }(2) 0.9390.344
Q = −
(P4.13)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 28
Problem 4.16
The mathematical model for the electrical system of Fig. 4.46 is:
1 1 1 2
1 2 2
2 2 1 22 2
1 1 1 0
1 1 0
L q q qC C C
L q q qC C
+ + − =
− + =
(P4.1)
which can be written in vector-matrix form as
1 1 2 2 11
2 2 2
2 2
1 1 10 0
0 1 1 0q C C C qL
L q qC C
+ − + = −
(P4.2)
The natural frequencies are determined using MATLAB® as the eigenvalues of the
dynamic matrix
[ ] [ ] [ ]1D L C−= (P4.3)
The command
>> [V,D] = eig(D)
returns the eigenvectors and eigenfrequencies
v =
0.9390 0.4816
-0.3440 0.8764
D =
1.0e+005 *
1.1100 0
0 0.1341
The eigenvectors are the ones that have been obtained in the previous Problem 4.15; the
square roots of the eigenvalues yield the two natural frequencies determined in Problem
4.15.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 29
Problem 4.17
The mathematical model of a free electrical system (with no voltage or current
source) is given in Eq. (4.91), whose standard format is based on the natural frequency
ωn and the damping ratio ξ, as provided in Eq. (4.93). The damping ratio is expressed as
in Eq. (4.94) as
2R C
L=ξ (P4.1)
The electrical system’s period is connected to its damped frequency as
2 2 2
2 2 2 11 2 1 1
dd n n n
Tf f
= = = =− − −
π π πω ω ξ π ξ ξ
(P4.2)
where fn is the system’s natural frequency (measured in Hz). The damping ratio is
expressed from Eq. (P4.2) as:
2 2
11n df T
= −ξ (P4.3)
whose value is ξ = 0.3049. The natural frequency is
12nf LC
=π
(P4.4)
The critical damping is defined by ξ = 1, and therefore, Eq. (P4.1) yields the expression
of the critical resistance
2crLRC
= (P4.5)
Equations (P4.4) and (P4.5) are solved for L and C, which are:
2
1
4
n cr
cr
Cf R
CRL
= =
π (P4.6)
The electrical components’ parameters are C = 5.3 x 10-7 F and L = 0.0053 H. The actual
resistance is determined now from Eq. (P4.1) as
2 LRC
= ξ (P4.7)
and its value is R = 60.98 Ω.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 30
Problem 4.18
When the circuit resistance is not accounted for, the equation describing the circuit is
( )Ldi tv Ldt
= (P4.1)
whereas the equation
( ) ( )LRLR
di tv L Ri tdt
= + (P4.2)
governs the circuit behavior for both inductance and resistance considered. For zero
initial conditions, the solutions to the two equations above are
( )
( )
L
RtL
LR
vi t tLv vi t eR R
−
= = −
(P4.3)
The inductance and resistance are calculated as
2 2 2 2
2 2
( / 2)4 44
( / 2)
N D N D NDLl N D
l N D NDRA d d
= = = × ×
× = = =
πµ πµ µπ
ρ ρ π ρπ
(P4.4)
The numerical values of L and R are L = 0.25 H and R = 170 Ω. Figure P4.1 shows the
plots of the two currents where the current iLR has a steady-state value (when t → ∞) of
v/R = 0.47 V.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 31
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time (sec)
Cur
rent
s (A
)
iLiLR
Figure P4.1 Currents through ideal inductor and real inductor as functions of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 32
Problem 4.19
The currents and their positive directions in the electrical circuit are shown in Fig.
P4.1. Because the circuit has four meshes, it follows that it has four DOF; therefore, four
currents can be selected as DOF and four independent algebraic equations are needed to
solve for the currents.
Figure P4.1 Electrical circuit with resistors and constant voltage source with currents
Using Kirchhoff’s node law the following current relationships are expressed
4 2 3
5 3 6
7 4 6 2 3 6
8 5 7 3 6 2 3 6 2
i i ii i ii i i i i ii i i i i i i i i
= − = + = − = − − = + = + + − − =
(P4.1)
The currents i1, i2, i3, and i6 are selected to be the DOF of this system. Kirchhoff’s
voltage law is applied to the four meshes of Fig. P4.1, which results in
( )( )
7 1
5 2 4 3 6 2 7 1
1 2 3 2 6 4 3
3 2 3 6 2 6
00
0
R i vR i R i R i R iR i i R i R i
R i i i R i
= + + − = − + − = − − − =
(P4.2)
The first Eq. (P4.2) allows solving for i1 as i1 = v/R7 = 4 A. The remaining Eqs. (P4.2)
are written as
( )
( )( )
5 6 2 4 3
1 2 1 4 3 2 6
3 2 3 3 2 3 6
0
0
R R i R i v
R i R R i R i
R i R i R R i
+ + =
− + + = − − + =
(P4.3)
which can be written in vector-matrix form as
R2 R4
R1
R3
R5
v +
–
R6
R7
i1 i2 i3
i4
i6
i5
i7 i8

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 33
( )( )
25 6 4
1 1 4 2 3
3 3 2 3 6
000
iR R R vR R R R iR R R R i
+ − + = − − +
(P4.4)
Equation (P4.4) allows solving for the unknown currents, namely
( )( )
12 5 6 4
3 1 1 4 2
3 3 2 36
000
i R R R vi R R R R
R R R Ri
−+
= − + − − +
(P4.5)
The currents values are i2 = i8 = 1.426 A, i3 = 1.079 A, i6 = 0.189 A, i4 = 0.347 A, i5 =
1.268 A, and i7 = 0.158 A.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 34
Problem 4.20
Figure P4.1 shows the currents in the circuit branches and the mesh positive
directions. Having three meshes, the electrical system has three DOF, which can be the
currents i1, i2, and i3.
Figure P4.1 Electrical circuit with resistors, inductors, and sinusoidal voltage source
The following equations are obtained after expressing Kirchhoff’s second law for each
mesh
[ ]
[ ]
13 2 2
1 1 2 1 3 2 2
2 1 2 3 1 3
( ) ( ) ( )
( ) ( ) ( ) ( ) 0
( ) ( ) ( ) ( ) 0
di tL R i t v tdt
dL i t i t R i t R i tdtdL i t i t i t R i tdt
+ = − + − = − − − =
(P4.1)
The following MATLAB® code
>>[i1,i2,i3]=dsolve('6*Di1+150*i2=20*sin(6*t),5*Di1...
-5*Di2+100*i3-150*i2=0,8*Di1-8*Di2-8*Di3...
-100*i3=0','i1(0)=0,i2(0)=0,i3(0)=0','t');
>>t=0:0.0001:10;
>>curr1=i1;
>>curr2=i2;
>>curr3=i3;
>>plot(t,curr1)
>>xlabel('Time (sec)')
>>ylabel('i_1 (A)')
R1 L3 L1
L2
R2
v
i1
i1 – i2
i3
i2
i1 – i2 – i3

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 35
generates the currents plotted in Fig. P4.2. The currents obtained through solving the
differential equations are:
16.795 70.7051
16.795 70.7052
16.795 70.7053
0.175 0.204cos(6 ) 0.088sin(6 ) 0.027 0.001
0.021cos(6 ) 0.084sin(6 ) 0.018 0.003
0.033cos(6 ) 0.072sin(6 ) 0.035 0.002
t t
t t
t t
i t t e ei t t e ei t t e e
− −
− −
− −
= − + + +
= − + + + = − + + −
(P4.2)
0 1 2 3 4 5 6 7 8 9 10-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Time (sec)
i 1 (A
)
0 1 2 3 4 5 6 7 8 9 10-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Time (sec)
i 2 (A
)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 36
0 1 2 3 4 5 6 7 8 9 10-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Time (sec)
i 3 (A
)
Figure P4.2 Main currents as functions of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 37
Problem 4.21
For S1 closed and S2 open, a charge
0q Cv= (P4.1)
charges the capacitor. When switches change states, the charge q0 = 50 x 10-6 F x 80 V =
0.004 C flows (and discharges) through the electrical circuit formed of the resistor,
inductor, and capacitor. The equation governing the time response for the second phase
is
1 0Lq Rq qC
+ + = (P4.2)
The following initial conditions are used
(0) 0; (0) 0.004q q= = (P4.3)
in conjunction with the MATLAB® code
>> dsolve('0.6*D2q+120*Dq+1/(50*10^(-6))*q=0','q(0)=0.004','Dq(0)=0')
and the time-domain charge is obtained
( ) ( ) 1000.0026sin 152.75 0.004cos 152.75 tq t t e−= + (P4.4)
By taking the derivative of q(t) of Eq. (P4.4) and using the MATLAB® command
>>i=diff(q,t)
returns the current
( ) ( ) 1000.871sin 152.75 0.0029cos 152.75 ti t t e−= − + (P4.5)
which is plotted in Fig. P4.1.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 38
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
Time (sec)
i (A
)
Figure P4.1 Current as a function of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 39
Problem 4.22
When the switch is closed, the current passes through the two resistors, and the
mathematical model is simply:
( )1 2R R i v+ = (P4.1)
which results in a current i = i0 = v/ (R1 + R2) = 0.25 A. The voltage across the capacitor
is equal to the voltage on the resistor R2 (the two components being in parallel), and is
equal to
22
1 2C
Rv iR vR R
= = ×+
(P4.2)
with a value of 50 V. The capacitor charge (its initial value) is therefore
0 Cq Cv= (P4.3)
which is q0 = 0.001 C.
When the switch is opened, the voltage source and the resistor R1 are removed from
the circuit; the initial capacitor charge q0 discharges through C and R2 in their circuit.
The mathematical model for that stage is
21 0R q qC
+ = (P4.4)
Equation (P4.4) is solved symbolically by using the MATLAB® code:
>> syms r2 c q0
>> dsolve('r2*Dq+1/c*q=0','q(0)= q0')
and the time-domain charge is obtained
20
tR Cq q e
−
= (P4.5)
The current is the time derivative of the charge of Eq. (P4.5), namely:
20
2
tR Cqi q e
R C
−
= = − (P4.6)
which is plotted in Fig. P4.1.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 40
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-0.25
-0.2
-0.15
-0.1
-0.05
0
Time(sec)
i(A)
Figure P4.1 Current through R2 as a function of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 41
Problem 4.23
Figure P4.1 shows the circuit with the currents and positive mesh directions. Having
three meshes, the electrical system has three DOF.
Figure P4.1 Electrical circuit with currents and positive mesh directions
Using Kirchhoff’s voltage law, the following equations can be written for the three
meshes:
[ ]
[ ]
[ ] [ ]
21 2 2 3 1
1
21 2 3 2
2
31 1 3 2 3 1 1 2 3
2
( )1 ( ) ( ) ( )
( )1 ( ) ( ) ( ) 0
( ) 1( ) ( ) ( ) ( ) ( ) ( ) 0
di ti t d t L R i t i t vC dt
di ti t i t i t d tLC dt
di tL R i t R i t i t i t i t i t d tdt C
+ − − =
− − − =
+ + − − − − =
∫
∫
∫
(P4.1)
which can also be written in terms of charges as
( )
232 1
1 2 2 221
22
1 2 3 2 22 2 2
23 3 1
1 1 2 2 1 2 322 2 2
( )( ) ( )1 ( )
( )1 1 1( ) ( ) ( ) 0
( ) ( ) ( ) 1 1 1( ) ( ) ( ) 0
dq td q t dq tq t L R R vC dt dt dt
d q tq t q t q t LC C C dt
d q t d qt dq tL R R R q t q t q tdt dt dt C C C
+ − + =
− − − = + + − − + + =
(P4.2)
Equations (P4.2) represent the mathematical model of the studied electrical system.
v
i1
A
B
C
D
R2
R1 C1
i3
i1 i1 − i2
C2
L1
L2 i2
i3 − i1 i1 − i2 − i3
+ –

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 42
Problem 4.24
In terms of charges, the mathematical model of the electrical system of Fig. 4.51 is:
( )
232 1
1 2 2 221
22
1 2 3 2 22 2 2
23 3 1
1 1 2 2 1 2 322 2 2
( )( ) ( )1 ( )
( )1 1 1( ) ( ) ( ) 0
( ) ( ) ( ) 1 1 1( ) ( ) ( ) 0
dq td q t dq tq t L R R vC dt dt dt
d q tq t q t q t LC C C dt
d q t d qt dq tL R R R q t q t q tdt dt dt C C C
+ − + =
− − − = + + − − + + =
(P4.1)
The second Eq. (P4.1) is used first to express the second derivative of q2, which is then
substituted into the first Eq. (P4.1); Equations (P4.1) are rewritten as
311 2 3
2 1 2 2 2 2 2 2
22
1 2 322 2 2 2 2 2
23 32 1 1 2
1 2 321 1 1 2 1 2 1 2
( )( ) 1 1 1 1 1 1( ) ( ) ( )
( ) 1 1 1( ) ( ) ( )
( ) ( )( ) 1 1 1( ) ( ) ( )
dq tdq t q t q t q t vdt dt R C C R C R C R
d q t q t q t q td t L C L C L C
d q t d qtR dq t R R q t q t q tdt L dt L dt L C L C L C
= − + + × + × + ×
= × − × − ×
+= × − × + × − × − ×
(P4.2)
In short-form to be used in Simulink®, Eqs. (P4.2) are written as
311 1 2 2 2 3 3
22
1 2 32
23 31
1 2 3 1 3 2 3 32
( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( ) ( )
dq tdq t a q t a q t a q t a vdt dt
d q t bq t bq t bq tdt
d q t d qtdq tc c c q t c q t c q tdt dt dt
= − + + + = − −
= − + − −
(P4.3)
where
1 2 32 1 2 2 2 2
2 2
2 1 21 2 3
1 1 1 2
1 1 1 1 12.921; 1.623; 0.0045
1 178.571
1183.333; 475; 297.619
a a aR C C R C R
bL CR R Rc c cL L L C
= + = = = = =
= = +
= = = = = =
(P4.4)
The Simulink® diagram solving Eqs. (P4.3) is shown in Fig. P4.1 and the time variations
of the three currents are plotted in Fig. P4.2.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 43
v
-K-
-K-
-K-
-K-
-K-
-K-
-K-
b1
-K-
-K-
-K-
-K-
-K-
Scope2
Scope1
Scope
1s
Integrator4
1s
Integrator3
1s
Integrator2
1s
Integrator1
1s
Integrator
Add2
Add1
Add
i_1 q_1
i_2
q_2
i_3 q_3
Figure P4.1 Simulink® diagram integrating Eqs. (P4.3)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 44
Figure P4.2 Time variation of currents by Simulink® integration

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 45
Problem 4.25
Figure P4.1 shows the currents through the circuit.
Figure P4.1 Electrical circuit with current source and currents
The system has three meshes, and, therefore it possesses three DOF. By the node
analysis method, one of the nodes a, b, c or d can be selected as reference node, and, as a
consequence, the voltages of the three remaining nodes can be the system’s DOF.
Assuming the voltage at node c is vc = 0, the voltages va, vb and vd play the role of DOF.
The currents shown in Figure P4.1 are related as
1 2
1 3 4
5 2 4
i i ii i ii i i
= + = + = +
(P4.1)
Equations (P4.1) are expressed in terms of significant voltages as
1 2
1 3 4
5 2 4
a b a d
a b b b d
d a d b d
v v v viR R
v v v v vR R R
v v v v vR R R
− −= +
− −
= + − −
= +
(P4.2)
Equations (P4.2) can be rearranged in the form
a
c
R4 R1
R2
R5 R3
i
b d i1
i2
i4
i3
i5

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 46
1 2 1 2
1 1 3 4 4
2 4 2 4 5
1 1 1 1
1 1 1 1 1 0
1 1 1 1 1 0
a b d
a b d
a b d
v v v iR R R R
v v vR R R R R
v v vR R R R R
+ − − =
− + + + =
+ − + + =
(P4.3)
Equations (P4.3) are written in vector-matrix form as
1 2 1 2
1 1 3 4 4
2 4 2 4 5
1 1 1 1
1 1 1 1 1 00
1 1 1 1 1
a
b
d
R R R Rv iv
R R R R Rv
R R R R R
+ − −
− + + =
− + +
(P4.4)
The unknown voltage vector can be found as
1
1 2 1 2
1 1 3 4 4
2 4 2 4 5
1 1 1 1
1 1 1 1 1 00
1 1 1 1 1
a
b
d
R R R Rv iv
R R R R Rv
R R R R R
−
+ − −
= − + + − + +
(P4.5)
Using the numerical values of the problem and MATLAB®, the following voltages are
obtained: va = 0.1209 V, vb = 0.0643 V, and vd = 0.0835 V. The currents are therefore:
11
22
33
44
55
a b
a d
b
b d
d
v viR
v viR
viRv vi
RviR
−=
−
= = −
=
=
(P4.6)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 47
their numerical values being i1 = 1.1 mA, i2 = 1.9 mA, i3 = 1.6 mA, i4 = 0.48 mA, and i5
= 1.4 mA.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 48
Problem 4.26
Figure P4.1 shows the currents in the branches of the electrical circuit.
Figure P4.1 Electrical network comprising resistors and a current source to be modeled by the node
analysis method
For the circuit of Fig. P4.1, if node B is considered to be the reference node with zero
voltage, it follows the entire line BD is grounded, and therefore, the voltage of node D is
also zero. By using Kirchhoff’s node law, two node equations can be written when the
voltages vA and vC are associated with nodes A and C, namely:
1 2 1 2
2 3 4
2 3 4
0
or0 0
A CA
A C C C
v vvii i i R Ri i i v v v v
R R R
−− = += + = + − − − = +
(P4.1)
Equation (P4.1) can be written as:
1 2 2
2 2 3 4
1 1 1
1 1 1 1 0
A C
A C
v v iR R R
v vR R R R
+ − =
− + + + =
(P4.2)
and, further, in vector-matrix form as
1 2 2
2 2 3 4
1 1 1
1 1 1 1 0A
C
R R R v iv
R R R R
+ − = − + +
(P4.3)
The voltages vA and vC are determined from Eqs. (P4.3) by using matrix inversion and
multiplication with MATLAB® as:
R2
R1 R3
C
D
i3 i1 i2
R4 A
B
i4
i
–

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 49
( )1 2 3 2 4 3 4
1 3 1 4 2 3 2 4 3 4
1 3 4
1 3 1 4 2 3 2 4 3 4
A
C
R R R R R R R iv
R R R R R R R R R RR R R iv
R R R R R R R R R R
+ += + + + +
= + + + +
(P4.4)
Once the voltages vA and vC have been obtained, the 4 currents shown in Fig. P4.1 can be
determined as:
1 2 3 41 2 3 4
; ; ;A C C CA v v v vvi i i iR R R R
−= = = = (P4.5)
For the parameters of this problem, the following numerical values are obtained: vA =
0.02 V, vC = 0.003 V, i1 = 0.663 mA, i2 = 0.338 mA, i3 = 0.296 mA, and i4 = 0.043 mA.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 50
Problem 4.27
Figure P4.1 shows the operational amplifier circuit and the current passing through
the two electrical components.
Figure P4.1 Operational amplifier in a negative feedback circuit with input capacitor and feedback
resistor
Because the operational amplifier has infinite input impedance, there is no current
flowing through the op amp and therefore, the current through the capacitor is equal to
the current through the feedback branch. This current is expressed in two ways, for the
input branch and for the feedback branch, namely:
( )0
0
i
o
di C vdt
viR
= − − =
(P4.1)
Equations (P4.1) took into account that the plus and minus input voltages are equal to
zero due to negative feedback and ground connection of the positive input terminal.
These equations result in:
io
dvv RCdt
= − (P4.2)
which indicates the effect of this particular op amp circuit is that of differentiation.
Taking into account that vi = ct (with c = 80), the solution to Eq. (P4.2) is
ov RCc= − (P4.3)
and therefore the output voltage is constant. Figure P4.2 plots the input and output
voltages for the parameter numerical values of this problem.
vi vo
R
C
i
+ –
i

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 51
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-600
-500
-400
-300
-200
-100
0
100
200
Time (sec)
Inpu
t an
d ou
tput
vol
tage
s (V
)
vi
vo
Figure P4.2 Input and output voltages in terms of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 52
Problem 4.28
Figure P4.1 shows the operational amplifier circuit and the currents passing through
its components.
Figure P4.1 Operational amplifier with three components
The three currents highlighted in Figure 4.1 are related as:
1 2i i i= + (P4.1)
These currents are connected to their components and relevant voltages as
[ ]
[ ]
1
2
( ) 0
1( ) ( ) 0
0 ( ) ( )( )
i
i
o o
v tiR
i t v t dtLd v t dv ti t C C
dt dt
− = = − −
= = −
∫ (P4.2)
Equations (P4.2) took into account that the minus and plus input terminals are under zero
voltage since there is negative feedback and the plus terminal is connected to the ground.
Combining Eqs. (P4.1) and (P4.2) yields:
( )1 1( ) ( ) oi i
dv tv t v t d t CR L dt
+ = −∫ (P4.3)
which, after using the numerical value of vi and integration, can be written as
( ) 1( ) 1 40 4,000 ln 1 0.01
1 0.01odv t t kdt RC t LC
= − × − × + ++
(P4.4)
At t = 0, i = 0, and therefore, dvo(t)/dt = 0 – as follows from the third Eq. (P4.2). The
constant of Eq. (P4.4) is found as k1 = 40/(RC). Integrating now Eq. (P4.4) yields:
C
R
L + –
vi vo
i
i1
i2

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 53
( ) ( ) ( ) 1 24,000 4,000( ) ln 1 0.01 100 ln 1 0.01 100ov t t t t t k t kRC LC
= − × + − × + + − − + + (P4.5)
The output voltage is zero at t = 0, and therefore the constant k2 is determined from Eq.
(P4.5) as k2 = 400,000/(LC). As a consequence, the output voltage equation is
( ) ( )40 1 100 4,000 1 100 4,000( ) ln 1 0.01 ln 1 0.01ov t t t t tC R L C R L LC = + − + + − × +
(P4.6)
For the numerical values of this problem, the output voltage is plotted in Figure P4.2. It
can be seen that vo increases nonlinearly to very large negative values quite fast.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05-1200
-1000
-800
-600
-400
-200
0
200
Time (sec)
v o (V
)
Figure P4.2 Output voltage as a function of time

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 54
Problem 4.29
Figure P4.1 shows the electrical circuit after transforming the Δ (delta) connection
formed of the original resistors R1, R4, and R5 into the reversed-Y connection formed of
R14, R15, and R45.
Figure P4.1 Equivalent electrical circuit with input and output voltages
The new resistances are calculated as
1 414
1 4 5
4 545
1 4 5
1 515
1 4 5
R RRR R R
R RRR R R
R RRR R R
= + +
= + +
=
+ +
(P4.1)
The currents i1 and i2 are determined as functions of i by solving the equation system
( ) ( )1 2
15 2 1 45 3 2
i i iR R i R R i+ =
+ = + (P4.2)
as
45 31
45 3 15 2
15 22
45 3 15 2
R Ri iR R R R
R Ri iR R R R
+ = + + + + = + + +
(P4.3)
The input and output voltages are expressed as:
( )14 15 2 1
2 1 3 2
i
o
v R i R R iv R i R i= + +
= −
(P4.4)
a
b
i
i1
i2
vi
vo c
R14
R15
R45
R2
R3
d

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 55
Substituting i1 of the first Eq. (P4.3) into vi of Eq. (P4.4) yields the following current:
( )( )15 2 45 3 114
15 2 45 3
1 1i i
e
i v vR R R R RRR R R R
= × = ×+ +
++ + +
(P4.5)
whereas using the two currents of Eqs. (P4.3) in vo of Eq. (P4.4) results in:
2 45 3 152
15 2 45 3o e
R R R Rv i R iR R R R
−= × = ×
+ + + (P4.6)
Figure P4.2 shows the main operations that are performed in Simulink®, and which
are based on Eqs. (P4.5) and (P4.6), in order to plot the output voltage vo as a function of
vi and the saturation nonlinearity of R1.
v_i
Scope
Product1
Product
2
R_e2 in
1
1/R_e1 in
i
v _o
Figure P4.2 Main Simulink® diagram for solving for and plotting the output voltage
Figures P4.3 and P4.4 indicate the calculations that are necessary to apply in Simulink®
to obtain the equivalent resistances Re1 and Re2, and the plot of the output voltage. Please
note that the saturation limits corresponding to 1/Re1 that enters the first product of Fig.
P4.2 have to be set as vmax/R1 and vmin/R1 respectively; similarly, the saturation limits
corresponding to Re2 that enters the second product of Fig. P4.2 have to be set as vmax
and vmin, respectively, where vmax = 30 V and vmin = −20 V. As the plot of Fig. P4.4
shows it, the saturation on R1 does not alter the sinusoidal shape of the output voltage.

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 56
v_i
Scope
Saturation1
Saturation
-K-
R_5
310
R_4 + R_5
310
R_4 + R5
-K-
R_4 * R_5
-K-
R_4 * R5
-K-
R_4
210
R_3
390
R_2 + R_3
180
R_2
210
R_1 (linear)
-K-
R5 210
R3
390
R2 + R3
180
R2
Product9
Product8
Product7
Product6
Product5
Product4
Product3
Product2
Product1
Product
1
uMath
Function5
1
uMath
Function4
1
uMath
Function3
1
uMath
Function2
1
uMath
Function1
1
uMath
Function
Add7
Add6Add5
Add4
Add3
Add2
Add1Add
1/210
1/R_1 (linear)
i
v _o
R_1s (sat)
R_1s + R_4 + R_5 1/(R_1s + R_4 + R_5)
R_1s* R_4
R_14
R_1s * R_5
R_45
R_15
1/(R_2+R_3+R_45+R_15)
(R_3+R_45)*(R_2+R_15)/(R_2+R_3+R_45+R_15)
R_2+R_15
R_3 + R_45
(R_3+R_45)*(R_2+R_15)
R_1sR_1s
1/(R_2+R_3+R_45+R_15)
R_3*R_15
R_2*R_45
R_2*R_45-R_3*R_15)
Figure P4.3 Full Simulink® diagram for the calculation of vo, Re1 of Eq. (P4.5) and Re2 of Eq. (P4.6)

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 57
Figure P4.4 Time-domain plot of output voltage vo

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 58
Problem 4.30
The following mathematical model describes the dynamics of the electrical system of
Fig. 4.48:
[ ]
[ ]
13 2 2
1 1 2 1 3 2 2
2 1 2 3 1 3
( ) ( ) ( )
( ) ( ) ( ) ( ) 0
( ) ( ) ( ) ( ) 0
di tL R i t v tdt
dL i t i t R i t R i tdtdL i t i t i t R i tdt
+ = − + − = − − − =
(P4.1)
which is written to comply with Simulink® integration capabilities as
1 22
3 3
2 1 2 12 3
1 1
3 1 2 13
2
( ) 1( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
di t R i t v tdt L L
di t di t R Ri t i tdt dt L L
di t di t di t R i tdt dt dt L
= − +
= − +
= − −
(P4.2)
Figure P4.1 shows the Simulink® diagram solving Eqs. (P4.2).
Sine Wave
Scope2
Scope1
Scope
1s
Integrator2
1s
Integrator1
1s
Integrator
-K-
Gain4
20
Gain3
30
Gain2
-K-
Gain1
25
Gain
Add2
Add1
Add
di_1/dt
di_2/dt
di_3/dt
i_1
i_2
i_3
Figure P4.1 Simulink® diagram for calculation and plotting of the currents

Lobontiu: System Dynamics for Engineering Students Solutions: Chapter 4 59
Figure P4.2 illustrates the three currents that are plotted as functions of time.
Figure P4.2 Simulink® plots of currents