[ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)]...
12
CLOCKING EFFECTS IN A 1.5-STAGE AXIAL TURBINE - BOUNDARY LAYER BEHAVIOUR AT MIDSPAN Sven K ¨ onig Axel Heidecke Bernd Stoffel Turbomachinery Laboratory (TFA) Darmstadt University of Technology 64287 Darmstadt, Germany Email: [email protected] Andreas Fiala Karl Engel MTU Aero Engines 80995 Munich, Germany ABSTRACT This paper presents an experimental and numerical inves- tigation on the influence of clocking on the boundary layer be- haviour of the second stator in a 1.5-stage axial low pressure turbine. Surface mounted hot-film sensors were used to mea- sure the quasi shear stress on the second stator and static pres- sure tappings to obtain the pressure distribution. All experi- ments were carried out at midspan for different clocking posi- tions. The supporting numerical calculations were conducted with a two-dimensional Navier-Stokes solver using a finite vol- ume discretization scheme and the v 2 f turbulence model. NOMENCLATURE C Chord length C ax Axial chord length C f Friction coefficient ( C f = 2τ w ρu 2 1 ) clp Clocking position (fraction of airfoil pitch) E Anemometer output voltage E 0 Anemometer output voltage at zero flow velocity Ma Mach number ˙ m Mass flow RMS ∗ Non-dimensionalized RMS value (RMS ∗ = RMS τ qw ) s Pitch at midspan T t 1 Inlet air temperature u 1 Inlet velocity τ qw Quasi wall shear stress τ w Wall shear stress INTRODUCTION Rotor-stator interactions in multistage turbomachinery cause inherently unsteady flow fields. Additionally as the lift of blade rows increases, unsteady effects play a more and more impor- tant role concerning aerodynamic and structural performance. Wakes from upstream blade rows convect downstream many chord lengths and interact with wakes and airfoils of the follow- ing stages. To account for those effects from the beginning of the design process, a profound knowledge of its physics is necessary but not yet available. Clocking (indexing) is one way of influ- encing the flow field in multistage turbomachinery by changing the relative circumferential position of rotors or stators. Huber and Sharma [15] investigated the loss behaviour in a three-stage low pressure turbine with identical blade counts for all stator rows. They found a change in turbine efficiency of up to ±0.5% depending on the relative circumferential position of the two stators. This efficiency variation was called clocking ef- fect. Numerical investigations of Griffin et al. [10] showed sim- ilar results. Binder, Schr¨ oder and Hourmouziadis [3] observed higher wake defects on rotor blades in a five stage low pres- sure turbine. They showed that a higher wake defect occurred when the chopped wakes of the upstream rotor hit the leading edge of the second rotor blades, and that higher wake defect was 1 Copyright c 2004 by ASME Proceedings of ASME Turbo Expo 2004 Power for Land, Sea, and Air June 14-17, 2004, Vienna, Austria GT2004-54055 Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Terms of Use: http://asme.org/terms
Transcript of [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)]...
![Page 1: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/1.jpg)
4ra
Downloaded From
Proceedings of ASME Turbo Expo 200Power for Land, Sea, and Ai
June 14-17, 2004, Austria, Vienn
CLOCKING EFFECTS IN A 1.5-STAGE AXIAL TURBINE -BOUNDARY LAYER BEHAVIOUR AT MIDSPAN
Sven KonigAxel HeideckeBernd Stoffel
Turbomachinery Laboratory (TFA)Darmstadt University of Technology
64287 Darmstadt, GermanyEmail: [email protected]
Andreas FialaKarl Engel
MTU Aero Engines80995 Munich, Germany
Proceedings of ASME Turbo Expo 2004 Power for Land, Sea, and Air
June 14-17, 2004, Vienna, Austria
GT2004-54055
ABSTRACTThis paper presents an experimental and numerical inves-
tigation on the influence of clocking on the boundary layer be-haviour of the second stator in a 1.5-stage axial low pressureturbine. Surface mounted hot-film sensors were used to mea-sure the quasi shear stress on the second stator and static pres-sure tappings to obtain the pressure distribution. All experi-ments were carried out at midspan for different clocking posi-tions. The supporting numerical calculations were conductedwith a two-dimensional Navier-Stokes solver using a finite vol-ume discretization scheme and the v′2 f turbulence model.
NOMENCLATUREC Chord lengthCax Axial chord lengthCf Friction coefficient (Cf = 2τw
ρu21)
clp Clocking position (fraction of airfoil pitch)E Anemometer output voltageE0 Anemometer output voltage at zero flow velocityMa Mach numberm Mass flowRMS∗ Non-dimensionalized RMS value (RMS∗ = RMS
τqw)
s Pitch at midspanTt1 Inlet air temperatureu1 Inlet velocityτqw Quasi wall shear stress
1
: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
τw Wall shear stress
INTRODUCTIONRotor-stator interactions in multistage turbomachinery cause
inherently unsteady flow fields. Additionally as the lift of bladerows increases, unsteady effects play a more and more impor-tant role concerning aerodynamic and structural performance.Wakes from upstream blade rows convect downstream manychord lengths and interact with wakes and airfoils of the follow-ing stages. To account for those effects from the beginning of thedesign process, a profound knowledge of its physics is necessarybut not yet available. Clocking (indexing) is one way of influ-encing the flow field in multistage turbomachinery by changingthe relative circumferential position of rotors or stators.
Huber and Sharma [15] investigated the loss behaviour in athree-stage low pressure turbine with identical blade counts forall stator rows. They found a change in turbine efficiency of upto ±0.5% depending on the relative circumferential position ofthe two stators. This efficiency variation was called clocking ef-fect. Numerical investigations of Griffin et al. [10] showed sim-ilar results. Binder, Schroder and Hourmouziadis [3] observedhigher wake defects on rotor blades in a five stage low pres-sure turbine. They showed that a higher wake defect occurredwhen the chopped wakes of the upstream rotor hit the leadingedge of the second rotor blades, and that higher wake defect was
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 2: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/2.jpg)
Dow
suppressed when the wakes convected through the rotor passage.Ladwig [16] used a cascade wind tunnel to investigate low pres-sure turbine blades under steady state flow conditions. With theuse of cylindrical bars steady wakes were generated, impingingon the turbine blades. Ladwig showed that by changing the pointof impact of the cylinder wakes the profile losses of the turbineblades changed. He proposed to use this effect to increase turbineefficiency. Engber and Fottner [8] as well as Acton [1] were ableto confirm the results of Ladwig, using a different turbine bladedesign. Halstead et. al. [11] showed in experimental and numer-ical investigations of a 1.5 stage turbine that the boundary layerdevelopment of the suction side of the second stator is stronglyinfluenced by the relative position of the first stator. The wake in-duced periodic transition caused by the rotor wakes was the dom-inant mechanism. If the periodically incoming wakes of the firststator hit the leading edge of the second stator blades additionalturbulence was transported into the boundary layer of the sec-ond stator. The velocity defect and unsteady pressure field alsoinfluenced the transition process. Reinmoller and Niehuis [17]investigated the clocking effect in a 1.5 stage low pressure tur-bine with blades of low aspect ratio. Stadtmuller, Fottner and Fi-ala [19] were able to reduce losses by means of a high-lift bladedesign with a small separation bubble on the suction side.
Due to improved calculation models, numerical simulationsof the clocking effect gain more and more significance. Besidesprevious work by Dorney and Sharma [5] and Eulitz and En-gel [9], Dorney et. al. [7] give a good overview of numericalclocking investigations. Some other numerical work with de-tailed information about the turbulence modelling is given byHohn and Heinig [13] as well as Breitbach [4]. The clockingeffect is also observed in axial compressors. A good overview ofcompressor clocking investigations is given by Dorney et. al. [6]and Walker et. al. [21].
Authors often present results of clocking investigations interms of efficiency gain or loss. The results in this paper arefocused on the influence of clocking on the boundary layer be-haviour of the second stator which is assumed to be the maincause for the change in efficiency. Therefore unsteady measure-ments of the quasi shear stress are presented and compared withnumerical results.
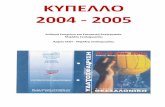
EXPERIMENTAL SETUP AND AERODYNAMIC DESIGNFigure 1 shows a schematic of the experimental facility. The
flow enters the annular test rig after passing a settling chamber.The vertical test section consists of two stators (3, 6) and onerotor (4). To adjust different clocking positions stator 1 can betraversed circumferentially relative to stator 2 by motor (2). Mo-tor (5) allows wake traverses behind stator 2 but was not used inthe present investigation. A 55 KW water cooled four quadrantelectro motor (1) keeps the RPM of the rotor at a constant leveland feeds the surplus power back to the supply system. In case of
2
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
Figure 1. TU Darmstadt Clocking Facility
unallowed mode of operation the fail safe emergency break (7)causes a controlled shut down of the rotor. The details about theexperimental setup and the installed equipment are described inmore detail by Heinke [12].
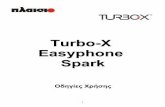
Figure 2. Definition of the Clocking Position
Table 1 gives an overview of the geometric and aerodynamicdesign parameters. Stator 2 was designed at MTU/Munich as atypical turbine profile but with a distinct separation bubble onthe suction side. To study the behaviour of the separation bubblein detail the current design slightly differs from actual turbine
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 3: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/3.jpg)
D
blade design to increase the bubble size. The Reynolds numberbased on exit conditions and cord length of stator 2 is in the or-der of 210000. For the design flow conditions the flow can beconsidered incompressible. The blade design leads to a nearlytwo-dimensional flow and felt seals are applied between rotatingparts to minimize leakage flows. Because of the two-dimensionaldesign a two-dimensional numerical code was used and all mea-surements were carried out at midspan.
A view on the airfoil geometry profiles and the definition ofthe clocking position (clp) is shown in Figure 2. The dashed-dotted line is the path followed by most of the fluid particles ofthe stator 1 wake. In the geometrical stagnation point of stator2 a pressure tapping is used to define the clocking position: thesmallest measured total pressure in the geometrical stagnationpoint indicates clp = 0.0. Due to the distortion of the stator 1wake within the rotor passage this position does not necessarilycoincide with the impingement point of the stator 1 wake on thestator 2 leading edge. However, the numerical calculations showthat the two positions are very close. Based on these results itis assumed that for clp = 0.0 the stator 1 wake hits the leadingedge of stator 2. Clp covers one airfoil pitch at midspan andvaries from -0.5 to 0.5. Negative values indicate that the stator 1wake impinges on the pressure side and positive values indicateimpingement points on the suction side.
Parameter Stator 1 Rotor Stator 2
Geometry
Tip Diameter 881 mm 881 mm 881 mm
Hub diameter 677.5 mm 677.5 mm 677.5 mm
Blade count 66 77 66
Vane blade spacing 35 mm - 35 mm
Chord length, C 42.79 mm 41.01 mm 38.67 mm
Axial chord length, Cx 35 mm 35 mm 30 mm
Span, h 101.75 mm 101.75 mm 101.75 mm
Pitch at midspan, s 37.09 mm 31.79 mm 37.09 mm
Aspect ratio, h/s 2.74 3.2 2.74
Geometrical turning angle 51.7◦ 59.5 ◦ 69.3 ◦
Design
Mass flow 13 kg/s
Inlet Mach number, Mac 0.125
Inlet flow angle, α 90◦
Inlet turbulence intensity 2.5 %
Rotational speed - 1247 rpm -
Exit Mach number, Mac 0.206 0.132 0.271
Exit flow angle, α 141.7◦ 80.7 ◦ 150 ◦
Table 1. Geometry and Design Parameters
3
ownloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
NUMERICAL SCHEME AND COMPUTATIONAL GRIDSThe unusual blade count of the 1.5 stage turbine shown in
Figure 1 and Table 1 leads to a reduction in numerical effort dueto a common divisor of the stator and rotor rows. Taking full ad-vantage of the periodicity, only six stator and seven rotor vaneshave to be computed. As the flow within the cross section is twodimensional, a 2d-computation is sufficient and leads to a con-siderable reduction in numerical effort. Further reduction can beachieved by using a scaling method. As the aim of the investi-gation was the boundary layer behaviour of the second stator itsgeometry was kept unchanged and a scaling of the rotor geome-try was carried out.
By scaling, the size of the rotor blades is increased in lengthand width in such a way that stator and rotor rows have the samepitch. The periodicity changes form 6:7:6 to 1:1:1 and only oneblade per row has to be computed. Many investigations showedlittle influence on the flow field over a wide range of scaling fac-tors but not for high lift blading. The high lift profile discussed inthis paper, does have a much narrower field of tolerance. Becauseof this, the dependency of the global flow field and in particularthe wake behaviour behind the rotor was examined as part of apreliminary investigation for different scaling schemes. Also thedependency of the axial position of the second stator on the wakecharacteristics was examined. For the geometric scaling used inthe present investigation a good agreement between the scaledand unscaled version were found.
Figure 3. Schematic of the Numerical 2d-Grid
The code used for the computational calculations is calledNS2D and was developed by Prof. Schilling and Dr. Skoda ofthe LFM at the TU Munich [18]. NS2D is based on the Finite-Volume-Navier-Stokes method. The equations are solved fornon-offset, non-overlapping structured grids. The block inter-faces are allowed to be matching or non matching. The transla-tory grid interaction for the moving rotor mesh will take place atso called sliding zones in a ”non-clicking” manner. Because ofthis, the handling of the grid generation is highly flexible and thegrid can be adapted to the requirements of the turbulence model.The pressure correction for the incompressible code was carriedout by the Simple or Simple-C scheme. Figure 3 shows all 15grid blocks.
The vanes are split along the periodic interface, hence themesh becomes smoother and the length of the periodic interface
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms
![Page 4: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/4.jpg)
D
is reduced. Details of the Low-Re grid at the stator 2 leadingedge are shown in Figure 4.
The turbulence model must be capable to compute the tran-sition and unsteadiness within the boundary layer. Therefore, thev′2 f -model was chosen. It is neither based on wall functions noron intermittency functions. Instead, the flow field is calculated upto the wall which requires a very fine Low-Re-Grid of high qual-ity. y+-values between 0.1 and 0.3 were realized, but through theinfluence of incoming wakes and the strong vane curvature y+
varies in time and space. The high near wall resolution needed torealize these y+-values can be clearly seen in the number of gridnodes of the stator 2 mesh. 516x101 grid points were used formeshing the suction side near wall region and 486x101 for thepressure side near wall region, respectively.
The v′2 f -model was developed by Durbin in 1995. It com-putes an additional transport equation for the scalar velocity in-dex v′2. Near wall effects are solved by the method of ellipticalrelaxation. The model is capable of computing the asymptoticbehaviour at the wall without any damping function.
The equation for the turbulent viscosity νT =Cµ fµkTT of thestandard k − ε-model is modified to νT = Cµv′2TT . In the nearwall region v′2 is defined by the Reynolds-stress normal to thewall. Afar the wall it is defined by the turbulence intensity nor-mal to the streamline. An additional transport equation is solvedfor v′2:
∂v′2
∂t+u j
∂v′2
∂x j= k f − v′2
εk
+∂
∂x j
[(ν+
νT
σk
)∂v′2
∂x j
]. (1)
Here, the k f term describes the redistribution of the turbu-lent kinetic energy.
To compute the relaxation term f the elliptic equation
L2T
∂2 f
∂x2j
− f =1
TT(C1 −1)
(v′2
k− 2
3
)−D2
Pk
k(2)
is solved. The boundary condition for f at the wall is given by
fw = −20ν2 limy→0
[v′2
εy4
]. (3)
Details about the v′2 turbulence model and it‘s implementa-tion are given in detail by Thurso [20] and Skoda [18].
The computational mesh of the three blade rows consists oftwo C-meshes around each vane, hosting the Low-Re grids andH-meshes with a coarser mesh structure. Especially for the Low-Re-meshes great care of the cell aspect ratio an the cell growth
4
ownloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
Figure 4. Stator 2 Leading Edge with Low-Re Grid
factor had to be taken into account to guarantee a good meshquality in the near wall region.
The numerical computation of the different clocking posi-tions was carried out stepwise. The inlet conditions are given inTable 1. The time dependent computation was based on a sta-tionary initial solution. On the basis of the fully converged timedependent solution the next clocking position was computed insuch a way, that the second stator vane was moved slowly to itsnext position while the computation was kept running. At itsnew position, the translatory stator 2 movement was halted andonly the rotor vane kept on moving. Hence, the flow field keptits conditioning while the new clocking position was obtainedand a converged solution for the next clocking position could bereached much faster than computing the whole field from scratch.This procedure was repeated for five clocking positions evenlyspaced over one vane pitch.
RESULTS AND DISCUSSIONExperimental Results
Two experimental techniques (static pressure tappings andsurface mounted hot-film probes) were used to investigate the in-fluence of clocking on the boundary layer behaviour of the sec-ond stator. In this section the experimental results obtained forthe design mass flow at midspan are presented. The inlet air pa-rameters were as follows: mass flow rate m = 12.88± 0.02 kg
s ,total temperature Tt1 = 58.8 ± 0.4◦C. Ten different clockingpositions were investigated varying between clp = −0.5 andclp = 0.5.
To determine the loading of stator 2, two adjacent vaneswere equipped with pressure tappings: one on the suction sideand one on the pressure side. To avoid interaction between thetappings they have not been aligned but every other tapping wasshifted by 2mm to the right and left of midspan maintaining aspacing of 2mm along the blade surface. The pressure measure-ments were performed using a ScaniValve equipment. The pres-
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 5: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/5.jpg)
Dow
sure sensor was a ”PDCR22” with a linearity of 0.04% and apressure range of 70mbar. A 12 bit A/D converter and a com-puter with a Pentium II processor were used to carry out the dataacquisition.
Figure 5. Time averaged Pressure Distribution for different Clocking Po-
sitions
In Figure 5 the pressure distribution on the stator 2 blade isshown for two different clocking positions. p is the static pres-sure along the blade surface at midspan and pt1 is the total pres-sure upstream of stator 1. The two distributions are almost identi-cal but a slight change in incidence can be seen at 0% fraction ofsurface length. For clp = 0.0, the position where the wake of sta-tor 1 is assumed to hit the leading edge of stator 2, a more positiveincidence can be seen. The aim of the design process was a dis-tinct separation bubble on the suction side of stator 2 and in spiteof the limited spatial resolution of the pressure tappings (2mmspacing) the typical distribution of static pressure in separationbubbles can be resolved in Figure 5. The strong pressure rise inthe turbulent part of the bubble indicates its separation locationat about 50% fraction of surface length. The higher resolution ofthe surface mounted hot film probes confirms this observation.Zooming the area around the separation bubble shows higherpressures between 50% and 60% fraction of surface length forclp = 0.0 – an indication for a shorter bubble. To assess mea-surement inaccuracies three measurements have been taken andthe error bars are plotted in the two magnified areas in Figure 5.
5
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
It can be clearly seen that the measurement accuracy is sufficientto resolve the small changes due to clocking.
The measurement of wall shear stress using hot film sen-sors was originally developed by Bellhouse and Schultz [2] andis now commonly used in turbomachinery applications. The ba-sic idea of this technique is the similarity between the velocityboundary layer and the thermal boundary layer generated by theheated hot film sensor. To minimize the effects of variations inthe gauge and surrounding temperature the relation between thewall shear stress and the heat transfer by convection to the fluidis expressed by the non-dimensional form
τqw ∝(
E2 −E20
E20
)3
, (4)
where τqw is the quasi shear stress, E is the output voltage, and E0
is the voltage under zero flow conditions. Since the gauges whereoperated at constant temperature rather than constant overheatthe zero voltage E0 was measured at the same air temperature asthe voltage E during the experiment.
To double the spatial resolution of just one hot film array twoadjacent blades were equipped on the suction side and two on thepressure side, maintaining the same inflow condition for eachclocking position because of the same stator blade counts. Onthe two corresponding blades the arrays where mounted shiftedby half of the array sensor distance which leads to a spatial res-olution of 1.25mm. To make possible an investigation of thewhole boundary layer the sensors cover the whole blade surfaceon the suction side as well as the pressure side, beginning withthe geometrical stagnation point. To maintain the original bladegeometry the blade surface had to be adjusted and the arrayswhere glued on lowered by their sensor thickness. The appli-cation of the four blades was carried out by MTU/Munich. Amultiplexer was used to scan the output voltage of the 71 sen-sors sequentially and pass it to the CTA bridge. To achieve thesame overheat temperature of 60◦C for all sensors, derivations insensor resistances had to be accounted for and each sensor wasallocated an individual reference resistance in the anemometerbridge. The frequency response of the hot films was optimizedby a square wave test. A once per revolution TTL trigger signalallows ensemble-averaging of the measured signal. The sam-pling frequency was set to 20kHz. All sensors except the one at8.0% fraction of surface length were functional.
In order to separate stochastic and periodic fluctuations theensemble-averaging technique was applied using the equation
〈x(t)〉 =1N
N
∑i=1
xi(t). (5)
The parameter xi(t) denotes the instantaneous value of samplei and N corresponds to the total number of measured samples.
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms
![Page 6: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/6.jpg)
Down
The ensemble-averaged RMS value reveals information aboutthe stochastic fluctuations of a signal and is defined by
〈RMS(t)〉 =
√1N
N
∑i=1
[xi(t)−〈x(t)〉]2. (6)
Figure 6. Time averaged Quasi Wall Shear Stress along Stator 2 Suction
Side
The following figures show the time averaged values ofquasi shear stress and RMS of the measured signal. Sensor loca-tions are marked by means of dots on the upper and lower bound-ary of the figures. Position P indicates the sensor location wherethe change in slope of the pressure distribution (Figure 5) takesplace and T S points to the position where the time mean skewsignal (not shown in the paper) reaches zero for clp = 0.0, in-dicating that in case of attached flows the transition is approxi-mately 50% complete.
Figure 6 shows the time averaged quasi wall shear stresson the suction side of stator 2 for three different clocking po-sitions. For all illustrated clocking positions (positive sign ofclp) the stator 1 wake convects along the suction side part of thechannel of stator 2. The shear stress on the leading edge (0.0%fraction of surface length) is lowest for clp = 0.5 whereas forclp = 0.125 and clp = 0.0 the value is almost identical. How-ever, considering the gradient towards the second sensor there isan increase in shear stress for clp = 0.5 and clp = 0.125 in con-trast to the decreasing value for clp = 0.0. The boundary layerthickness increases up to about 10% fraction of surface lengthresulting in lower velocity gradients and in turn to lower val-ues in wall shear stress. After this drop in shear stress for allthree clocking positions the value increases up to the sensor po-sition 34.5% since the acceleration on the suction side reducesthe boundary layer thickness which leads to higher velocity gra-dients and higher shear stress. Over the following five sensors
6
loaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.05
0.1
0.15
0.2
0.25
0.3
Fraction of Surface Length
RM
S*
clp = 0.000clp = 0.125clp = 0.500
P
TS
Figure 7. Time averaged non-dimensionalized RMS of τqw (stochastic
parts) along Stator 2 Suction Side
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
Fraction of Surface Length
RM
S(E
)/E
0
clp = 0.000clp = 0.125clp = 0.500
P
TS
Figure 8. Time averaged non-dimensionalized RMS of the measured
Voltage (stochastic parts) along Stator 2 Suction Side
the shear stress shows a strong negative gradient to reach valuesnear zero for sensor positions 47.8% and 50.5%. This minimumconfirms the assumed position (compare Figure 5) of the sepa-ration bubble to be in the vicinity of sensor position 50%. Theseparation bubble is followed by a steep increase in shear stresswhich decreases again after sensor position 61.1%. The magni-fied section in Figure 6 (sensor position 55.8%) shows a smalldependency of the quasi shear stress behind the separation bub-ble on the clocking position: the higher values of shear stress atsensor position 55.8% for clp = 0.0 indicate a shorter separa-tion bubble. It can be seen that the differences due to clockingare higher than the error bars of the three measurements. Afterend of transition the values of shear stress tend to be smaller forclp = 0.0. Since sensors on two adjacent blades take turns in Fig-ures 6 to 9 the slightly different flow conditions on the two bladeslead to higher quasi shear stress values for one blade and resultin oscillations in the quasi shear stress and the RMS curve (notshown in the figures). To smooth those oscillations one curve for
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 7: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/7.jpg)
Dow
each of the two different blades was created and the two curveswere averaged and plotted in Figures 6 to 9. However, the mea-sured values of the first two sensors are marked in Figure 6 toshow the strong influence of the clocking position on the leadingedge.
Figure 7 shows the ensemble-averaged (free of peri-odic parts) RMS value of the calculated τqw signal, non-dimensionalized by the time mean value of τqw at each sensorlocation. The time averaged values are displayed along the stator2 suction side for the same clocking positions as in Figure 6. Thefirst sensor shows a dependence on the clocking position withhighest values for clp = 0.0. Obviously the stator 1 wake imping-ing on the leading edge of stator 2 leads to a higher unsteadinessin the voltage signal. The lowest values are obtained if the stator1 wake convects midway through the stator 2 passage (clp = 0.5).When considering hot film data high RMS values are represen-tative for transitional boundary layers with highest values foundwhere transition is approximately 50% complete (compare How-ell [14]). For all three clocking positions this maximum occursaround position 55.8%. The transition point obtained from thetime mean skew signal (zero skew) is shifted downstream com-pared to the RMS maximum. Usually the two points are close toeach other but this shift is typical in flows with a pronounced sep-aration bubble. Point P indicates transition as obtained from thepressure distribution since it defines the position of the last sen-sor in the static pressure distribution before the change of slopetakes place. In Figure 7 P is also shifted downstream comparedto the RMS maximum.
Often RMS distributions show an elevated region upstreamof a separation bubble. If the RMS value of the measured volt-age signal is non-dimensionalized by the voltage under zero flowconditions this elevated region can be seen at sensor position45.2% in Figure 8. For clp = 0.5 the RMS values in this ele-vated region are smallest. Apart from this difference both RMSdefinitions show similar characteristics. However, in Figure 8the transition point P obtained from the pressure distribution liescloser to the RMS maximum.
In Figure 7 only a small dependency of the stochastic partsin the signal on the clocking position could be found. If the RMSvalue of the ensemble-averaged τqw value is calculated, only pe-riodic parts of the signal are considered. Figure 9 shows thisRMS value non-dimensionalized by the time mean quasi shearstress along the stator 2 suction side. A strong dependency onthe clocking position around the leading edge, within the transi-tion region and after transition could be found. For clp = 0.0 ahigher unsteadiness due to the periodic incoming wakes can beseen. It seems that higher RMS values in the stagnation pointof stator 2 caused by the periodic wakes weaken the amplitudesduring the transition process and even the periodic unsteadinessafter the transition area.
Figure 10, 11 and 12 show the ensemble-averaged quasishear stress on the stator 2 suction side for different sensors
7
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Fraction of Surface Length
RM
SP*
clp = 0.000clp = 0.125clp = 0.500
P
TS
Figure 9. Time averaged non-dimensionalized RMS Signal (periodic
parts) along Stator 2 Suction Side
0.1
0.12 clp = −0.375
0.1
0.12 clp = −0.125
0.1
0.12 clp = 0.000
Qu
asi S
hea
r S
tres
s
0.1
0.12 clp = 0.125
1.0 2.0 3.0 4.0 5.0 6.0
0.1
0.12 clp = 0.500
Wake Passing Periods
Figure 10. Ensemble-averaged Quasi Shear Stress on Stator 2 Suction
Side, Sensor Position: 0.0%
and different clocking positions. Test measurements were car-ried out to optimize the number of ensembles required whichled to the number of 100 ensembles. The three sensors be-ing investigated are located on the leading edge (sensor position0.0%), within the separation bubble (53.2%) and in the turbulentpart of the transition area (58.5%). For two clocking positions(clp = −0.375, clp = −0.125) the stator 1 wake convects alongthe pressure side, for clp = 0.125 and clp = 0.5 along the suc-tion side and for clp = 0.0 on the leading edge of stator 2. Atsensor position 0.0% (Figure 10) the amplitudes in quasi shearstress are highest and the variations due to the rotor wakes arealmost sinusoidal for clp = 0.0. This is in agreement with the el-evated RMS values in Figure 9 near the leading edge. The great-est mean value is obtained for clp = 0.125 and the lowest values
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms
![Page 8: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/8.jpg)
D
0.02
0.04clp = −0.375
0.02
0.04clp = −0.125
0.02
0.04clp = 0.000
Qu
asi S
hea
r S
tres
s
0.02
0.04clp = 0.125
1.0 2.0 3.0 4.0 5.0 6.0
0.02
0.04clp = 0.500
Wake Passing Periods
Figure 11. Ensemble-averaged Quasi Shear Stress on Stator 2 Suction
Side, Sensor Position: 53.2%
0.120.130.14
clp = −0.375
0.120.130.14
clp = −0.125
0.120.130.14
clp = 0.000
Qu
asi S
hea
r S
tres
s
0.120.130.14
clp = 0.125
1.0 2.0 3.0 4.0 5.0 6.0
0.120.130.14
clp = 0.500
Wake Passing Periods
Figure 12. Ensemble-averaged Quasi Shear Stress on Stator 2 Suction
Side, Sensor Position: 58.5%
for clp = −0.375 and clp = 0.5, see also Figure 6. A significantchange in signal pattern can be seen for the different clockingpositions. Obviously the interaction between the stator 1 and therotor wake leads to different levels in mean shear stress, fluctua-tions and signal form. The sensor located within the separationbubble (Figure 11) also shows a strong dependence on the clock-ing position. The highest amplitudes occur for clp =−0.375 andthe lowest for clp = 0.0. A distinct change in the form of thesignal is obvious for clp = 0.0: there is an additional dent dur-ing one blade passing period. This dent is caused by the stator 1
8
ownloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
wake which can also be seen in the s-t diagrams. Furthermore,the mean value decreases to reach its lowest value for clp = 0.0.Even after transition (Figure 12) this tendencies are still appar-ent. The form of the signal changes during the transition processand the rotor wakes broaden compared to sensor position 53.2%.
0 0.25 0.5 0.75 1
1.0
2.0
3.0
4.0
Fraction of Surface Length
Wak
e P
assi
ng
Per
iod
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
A
B
C
Figure 13. S-t Diagram of Ensemble-averaged Quasi Shear Stress,
clp=0.0
0 0.25 0.5 0.75 1
1.0
2.0
3.0
4.0
Fraction of Surface Length
Wak
e P
assi
ng
Per
iod
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
D
E
Figure 14. S-t Diagram of Ensemble-averaged Quasi Shear Stress,
clp=0.5
To get deeper insight into the unsteady boundary layer be-haviour, s-t diagrams of quasi shear stress and RMS are shownin Figures 13 to 16. The ensemble data of τqw were not non-dimensionalized since the overall levels of shear stress are crucialto indicate flow separation. Two collateral trajectories are drawnin each figure at a speed of the local free-stream velocity to in-dicate the flow paths of two consecutive rotor wakes under the
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 9: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/9.jpg)
Dow
assumption that there is no velocity defect by the wake. Impor-tant regions within the s-t diagrams are identified by letters A, B,etc. Sensor positions are indicated by dots at the upper boundaryof each figure. In the s-t diagrams the results of two neighboringblades are superimposed to increase the spatial resolution. Fordifferent clocking positions the circumferential position of stator1 changes but the position of stator 2 is held constant relative tothe rotor. Therefore the impingement point of the rotor wakes onstator 2 does not change for varying clocking positions.
In Figure 13 and 14 the time-dependant behaviour of quasishear stress for two different clocking positions is shown. Thedeep blue region around sensor position 50% corresponds to theminimum value of quasi shear stress in Figure 6 and the locationof the separation bubble, respectively. Within the blue regionthe influence of the rotor wakes on the separation bubble is ob-vious: following the trajectories of the rotor wakes a periodicchange in bubble size can be seen for both clocking positionswithin the regions B and D. Due to the elevated level of turbu-lent kinetic energy within the rotor wakes a reduction in bubblesize occurs when the wakes convect over the separation bubble.For clp = 0.5 no appearance of the stator 1 wake in the regionof the separation bubble is obvious but for clp = 0.0 a distinctinfluence can be seen in region C: the stator 1 wake leads to asimilar but more confined region of bubble size reduction thanthe rotor wake. However, for all clocking positions neither therotor wakes nor the stator wakes are able to completely suppressthe separation bubble. The highest gradients of wall shear stressoccur around 55% fraction of surface length and indicate bound-ary layer transition. A distinct influence of the clocking positionand the incoming wakes on the time dependant boundary layertransition position can be seen in the s-t diagrams. Obviously theturbulence of the impinging rotor and stator wakes is sufficientto move the transition point temporarily. The disturbances pro-duced by the unstable separation bubble shear layer directly de-termine the transition of the entire boundary layer. For clp = 0.0the influence of the stator 1 wakes is even more pronounced thanthat of the rotor wakes. This is surprising since the turbulence isgenerated in front of the upstream rotor. Point A shows the ele-vated shear stress due to the incoming stator 1 wakes and behindpoint C their influence on the transition position can be seen.
Figure 15 and 16 show the corresponding RMS distributionof τqw non-dimensionalized by the time mean quasi wall shearstress at the corresponding sensor location. The position of theyellow/red areas is strongly dependent on the convection of ro-tor and stator 1 wakes. Higher RMS values at G and I clearlyindicate the influence of the rotor wakes on the boundary layer.Again, comparing clp = 0.5 and clp = 0.0 the influence of thestator 1 wakes between two rotor wakes can be seen only forclp = 0.0. Elevated RMS values at F show the influence of thestator 1 wakes on the leading edge and in region H their influencein the transition region is obvious. The highest absolute valuesof RMS in the transition region occur for clp = 0.5, whereas the
9
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
time mean value in this region is higher for clp = 0.0 (compareFigure 7). This is due to the elevated RMS values of the stator 1wakes that are visible between rotor wakes only for clp = 0.0.
0 0.25 0.5 0.75 1
1.0
2.0
3.0
4.0
Fraction of Surface Length
Wak
e P
assi
ng
Per
iod
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
F
G
H
Figure 15. S-t Diagram of Ensemble-averaged RMS, clp=0.0
0 0.25 0.5 0.75 1
1.0
2.0
3.0
4.0
Fraction of Surface Length
Wak
e P
assi
ng
Per
iod
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
I
Figure 16. S-t Diagram of Ensemble-averaged RMS, clp=0.5
Numerical ResultsIn the following section the numerical results for the design
parameters in Table 1 are presented. They should be consideredas a first step to improve the accuracy of calculations on separa-tion bubbles subjected to incoming wakes. Up to now a directcomparison to the experimental results is difficult since the bub-ble size in the calculations is predicted too small.
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms
![Page 10: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/10.jpg)
Dow
The computation was carried out for five different clockingpositions. Due to the enormous numerical effort and a slightlydifferent definition of the clocking position compared to the ex-periment not all clocking positions are identical to those in theexperiment.
0 0.2 0.4 0.6 0.8 10.86
0.88
0.9
0.92
0.94
0.96
0.98
Fraction of Surface Length
p/p
t 1
clp=0.0clp=0.18clp=0.38clp=−0.41clp=−0.21
Figure 17. Time averaged Pressure Distribution for different Clocking
Positions (CFD)
The time averaged pressure distribution for all calculatedclocking positions as plotted in Figure 17 shows almost no dif-ference. Also, in the time mean there is no typical plateau ofstatic pressure in the region where the separation bubble doesoccur. This is attributed to the fact that the calculations predicta lower loading on the stator 2 suction side and in turn a smallerseparation bubble compared to the experimental results shown inFigure 5. There’s a good agreement between experiment and cal-culation concerning the pressure side loading. In Figure 18 thetime dependant behaviour of the separation bubble can be seenin the streamline plot and the static pressure distribution. Thebehaviour of the separation bubble differs between the numeri-cal and experimental investigation. While in the experiment itdoes not disappear if subjected to incoming wakes, it shows aperiodic behaviour in the numerical solution. In the numericalresults there is no separation bubble for the clocking positionsclp = 0.0 and clp = 0.188. For the other clocking positions thebubble appears, grows, decreases and finally disappears between50% and 60% fraction of surface length. This behaviour is peri-odic within a rotor period. One bubble life-time-cycle is plottedmagnified in Figure 18 for clp = −0.412. In the time dependantpressure distribution the plateau of the separation bubble can beseen.
A strong dependency of the turbulence intensity within theboundary layer can be found, which periodically changes due torotor stator interaction. The second mechanism which can beclearly identified to influence the transition is the different im-pingement point of the stator 1 wakes on the second stator. De-
10
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 Te
0 0.2 0.4 0.6 0.8 10.86
0.88
0.9
0.92
0.94
0.96
0.98
Fraction of Surface length
p/p
t 1
10% Rotor Period
0 0.2 0.4 0.6 0.8 10.86
0.88
0.9
0.92
0.94
0.96
0.98
Fraction of Surface length
p/p
t 1
20% Rotor Period
0 0.2 0.4 0.6 0.8 10.86
0.88
0.9
0.92
0.94
0.96
0.98
Fraction of Surface length
p/p
t 1
30% Rotor Period
0 0.2 0.4 0.6 0.8 10.86
0.88
0.9
0.92
0.94
0.96
0.98
Fraction of Surface length
p/p
t 140% Rotor Period
Figure 18. Time dependent Bubble Behaviour for clp=-0.412 (CFD)
pendant on the clocking position, the change of the impingementpoint leads to a different boundary layer turbulence intensity withvarying clocking position.
In Figure 19 the friction coefficient is shown. It can be in-terpreted as an indicator of separation. Here, the variation fordifferent clocking positions is more obvious. In the time depen-dent solution separation does occur for the clocking positionsclp = 0.388, clp =−0.412 and clp =−0.212. Nevertheless a ten-dency to separation can be found for clp = 0.0 and clp = 0.188,
Copyright c© 2004 by ASME
rms of Use: http://asme.org/terms
![Page 11: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/11.jpg)
Down
0 0.2 0.4 0.6 0.8 1−0.01
0
0.01
0.02
0.03
0.04
0.05
Fraction of Surface Length
Cf
clp=0.0clp=0.18clp=0.38clp=−0.41clp=−0.21
Figure 19. Time averaged Friction Coefficient along Stator 2 Suction
Side (CFD)
as the friction coefficient is periodically approaching zero in theregion of 50% to 60% fraction of surface length.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Fraction of Surface Length
RM
S/R
MS
max
clp=0.0clp=0.18clp=0.38clp=−0.41clp=−0.21
Figure 20. Time averaged RMS Signal along Stator 2 Suction Side
(CFD)
In Figure 20 the RMS values non-dimensionalized by themaximum RMS value of all computed clocking positions are pre-sented. Clearly, a dependency on the clocking position can befound. The clocking positions where a separation bubble existsshow higher values. For clp = 0.388 and clp = −0.412 a transi-tion caused by the separation bubble is obvious. For clp = 0.188the RMS are almost constant over the whole blade surface.
CONCLUSIONSIn the present paper a detailed experimental and numerical
investigation on the influence of stator clocking in a 1.5 stage lowpressure turbine is presented. The research was focused on theboundary layer behaviour of the stator 2 suction side subjected to
11
loaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
the incoming rotor wakes and the chopped stator 1 wakes. Dueto the aerodynamic design the flow could be considered incom-pressible and two-dimensional.
In the static pressure distribution a dependency of the in-cidence angle and a slight change in bubble size on the clock-ing position could be found. The results of the surface mountedhot film probes confirm the distinct change in bubble size and aslight change in the end of the transition region at 58.5% fractionof surface length. On the stator 2 leading edge a strong depen-dency of the ensemble-averaged quasi shear stress signal on theclocking position was found. This confirms that the incomingflow angle for the profile changes with clocking position. Theamplitudes were highest when the impingement point of the sta-tor 1 wake was close to the leading edge of stator 2. Within theseparation bubble a different tendency was observed: the high-est amplitudes occurred when the stator 1 wake convected closeto midway through the stator 2 passage. After the transition thequasi shear stress as well as the RMS values were also higher forthis clocking position. The form of the quasi shear stress signalchanges over the blade surface and depends on the clocking po-sition. Even after the transition a different signal pattern was ob-served for different clocking positions. S-t diagrams of τqw andensemble-averaged RMS showed that the enhanced turbulenceof the rotor wakes leads to a time-dependant size of the separa-tion bubble but is not sufficient to completely suppress separa-tion. A distinct influence of wakes and clocking position on thetime dependant boundary layer transition position was found dueto the high spatial resolution of the sensors. For some clockingpositions a distinct influence of the stator 1 wakes between con-secutive rotor wakes on the time dependant size of the separationbubble could be observed.
The v′2 f turbulence model proved to be capable of resolvingtransitional effects without using any transition model but dis-tinct deviations between the experimental and numerical resultswere found. In the calculations the separation bubble showeda time dependant behaviour and was suppressed for some timesteps due to the incoming wakes. This time dependant vanishingof the separation bubble could not be found in the experiment.Also, the suppression of the bubble for some of the calculatedclocking positions does not agree with the experimental results.Further efforts have to be made to improve the consistency withthe experiment.
ACKNOWLEDGMENT
The work of this project has been supported and funded bythe German Federal Ministry of Economics and Labour as partof the AG Turbo II research programme. Further we would liketo acknowledge the financial and technical support of the MTUMunich and their scientific advice.
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms
![Page 12: [ASME ASME Turbo Expo 2004: Power for Land, Sea, and Air - Vienna, Austria (June 14–17, 2004)] Volume 5: Turbo Expo 2004, Parts A and B - Clocking Effects in a 1.5-Stage Axial Turbine:](https://reader043.fdocument.org/reader043/viewer/2022020617/575096a91a28abbf6bcc8c92/html5/page/12.jpg)
Dow
REFERENCES[1] P. Acton. 1997 Untersuchungen des Grenzschichtum-
schlages an einem hochbelasteten Turbinengitter unter in-homogenen und instationaren Zustrombedingungen. Dis-sertation UniBw Munchen.
[2] B. L. Bellhouse, D. L. Schultz. 1966 Determination ofmean and dynamic skin friction, separation and transitionin low-speed flow with a thin-film heated element. J. FluidMech., Vol. 24, pp. 379-400.
[3] A. Binder, T. Schroder, J. Hourmouziadis. 1989 Turbulencemeasurements in a multistage LP-Turbine. ASME Journalof Turbomachinery, Vol. 111, pp 153-161.
[4] C. Breitbach, B. Stoffel. 2001 Computation of Wake-Induced Unsteady Flow on a Flat Plate using Two-LayerTurbulence Models., Proceedings of The 8th InternationalSymposium on Flow Modelling and Turbulence Measure-ments, FMTM2001, Tokyo.
[5] D. J. Dorney, O. P. Sharma. 1996 A Study of Turbine Per-formance Increases Through Airfoil Clocking. AIAA Paper96-2816.
[6] D. J. Dorney, et. al. 1999 Full-Annulus Simulations of Air-foil Clocking in a 1.5 Stage Axial Compressor. InternationalJournal of Turbo and Jet Engines, 16, pp. 149-160.
[7] D. J. Dorney, D. L. Sondak, U. E. Stang, et. al. 2001 Com-putational Study of Clocking in an Embedded Stage in a4-Stage Industrial Turbine. ASME Paper 2001-GT-0509.
[8] M. Engber, L. Fottner. 1995 The Effect of Incoming Wakeson Boundary Layer Transition of a Highly Loaded TurbineCascade. AGARD PEP 85th Symposium on Loss Mecha-nisms and Unsteady Flows in Turbomachines, CP-571.
[9] F. Eulitz, K. Engel. 1998 Numerical investigations of wakeinteractions in a low pressure turbine and its influence onloss mechanisms. ASME-Paper 98-GT-563.
[10] L. W. Griffin, F. M. Huber, O. P. Sharma. 1995 PerformanceImprovement Through Indexing Turbine Airfoils, Part 2 -Numerical Simulation. ASME Journal of Turbomachinery,Vol. 118, pp. 636-642.
[11] D. E. Halstead et. al. 1997 Boundary Layer Development inAxial Compressors and Turbines - Part 1 Composite Pic-ture. ASME Journal of Turbomachinery, Vol. 119, pp. 114-127.
[12] W. Heinke. 2002 Experimentelle Untersuchungenzum Clocking-Effekt an einer statioaren Stator-Stator-Anornung. Dissertation TU Darmstadt.
[13] W. Hohn, K. Heinig. 2000 Numerical and Experimen-tal Investigation of Unsteady Flow Interaction in a Low-Pressure Multistage Turbine. ASME Journal of Turboma-chinery, Vol. 122. pp 628-633.
[14] R. J. Howell. 1999 Wake-Separation Bubble Interactionsin Low Reynolds Number Turbomachninery. DissertationCambridge University
[15] F. W. Huber, O. P. Sharma, S. W. Gaddis. 1995 Performance
12
nloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 04/09/2014 T
Improvement Through Indexing of Turbine Airfoils, Part 1Experimental Investigation. ASME Paper 95-GT-27.
[16] M. Ladwig. 1991 Experimentelle Untersuchungen zum Ein-fluß einer inhomogenen Zustromung auf die Entwicklungdes Stromungsfeldes in Turbinenschaufelgittern. Disserta-tion UniBw Munchen.
[17] U. Reinmoller, R. Niehuis. 2002 Clocking Effects in a 1.5Stage Axial Turbine-Steady and Unsteady Experimental In-vestigations Supported by Numerical Simulations. ASMEJournal of Turbomachinery, Vol. 124. pp 52-58.
[18] R. Skoda. 2003 Numerische Simulation abgeloster undtransitionaler Stromungen in Turbomaschinen. Disserta-tion TU Munchen.
[19] P. Stadtmuller, L. Fottner, A. Fiala. 2000 Experimental andNumerical Investigations of Wake-Induced Transition ona Highly Loaded LP-Turbine at low Reynolds Numbers.ASME Paper, 2000-GT-0269.
[20] J. Thurso. 2002 Numerische Simulation des Gren-zschichtverhaltens in Turbinengittern unter periodisch-instationaren Stromungsbedingungen. Dissertation TUDarmstadt.
[21] G. J. Walker, J. D. Hughes, W. J. Solomon. 1998 PeriodicTransition on an Axial Compressor Stator Incidence andClocking Effects, Part I and Part II. ASME Paper, 98-GT-363 and 98-GT-364.
Copyright c© 2004 by ASME
erms of Use: http://asme.org/terms