AM 205: lecture 16 - courses.seas.harvard.edu
57
AM 205: lecture 16 I Last time: hyperbolic PDEs I Today: parabolic and elliptic PDEs, introduction to optimization
Transcript of AM 205: lecture 16 - courses.seas.harvard.edu

AM 205: lecture 16
I Last time: hyperbolic PDEs
I Today: parabolic and elliptic PDEs, introduction tooptimization

The Heat Equation
The canonical parabolic equation is the heat equation
ut − αuxx = f (t, x),
where α models thermal diffusivity
In this section, we shall omit α for convenience
Note that this is an Initial-Boundary Value Problem:
I We impose an initial condition u(0, x) = u0(x)
I We impose boundary conditions on both sides of the domain

The Heat Equation
A natural idea would be to discretize uxx with a central difference,and employ the Euler method in time:
Un+1j − Un
j
∆t−
Unj−1 − 2Un
j + Unj+1
∆x2= 0
Or we could use backward Euler in time:
Un+1j − Un
j
∆t−
Un+1j−1 − 2Un+1
j + Un+1j+1
∆x2= 0

The Heat Equation
Or we could do something “halfway in between”:
Un+1j − Un
j
∆t− 1
2
Un+1j−1 − 2Un+1
j + Un+1j+1
∆x2− 1
2
Unj−1 − 2Un
j + Unj+1
∆x2= 0
This is called the Crank–Nicolson method1
In fact, it is common to consider a 1-parameter “family” ofmethods that include all of the above: the θ-method
Un+1j − Un
j
∆t− θ
Un+1j−1 − 2Un+1
j + Un+1j+1
∆x2− (1 − θ)
Unj−1 − 2Un
j + Unj+1
∆x2= 0
where θ ∈ [0, 1]
1From a paper by Crank and Nicolson in 1947, note: “Nicolson” is not atypo!

The Heat Equation
With the θ-method:
I θ = 0 =⇒ Euler
I θ = 12 =⇒ Crank–Nicolson
I θ = 1 =⇒ backward Euler
For the θ-method, we can
1. perform Fourier stability analysis
2. calculate the truncation error

The θ-Method: Stability
Fourier stability analysis: Set Unj (k) = λ(k)ne ik(j∆x) to get
λ(k) =1− 4(1− θ)µ sin2
(12k∆x
)1 + 4θµ sin2
(12k∆x
)where µ ≡ ∆t/(∆x)2
Here we cannot get λ(k) > 1, hence only concern is λ(k) < −1
Let’s find conditions for stability, i.e. we want λ(k) ≥ −1:
1− 4(1− θ)µ sin2
(1
2k∆x
)≥ −
[1 + 4θµ sin2
(1
2k∆x
)]

The θ-Method: Stability
Or equivalently:
4µ(1− 2θ) sin2
(1
2k∆x
)≤ 2
For θ ∈ [0.5, 1] this inequality is always satisfied, hence theθ-method is unconditionally stable (i.e. stable independent of µ)
In the θ ∈ [0, 0.5) case, the “most unstable” Fourier mode is whenk = π/∆x , since this maximizes the factor sin2
(12k∆x
)

The θ-Method: Stability
Note that this corresponds to the highest frequency mode that canbe represented on our grid, since with k = π/∆x we have
e ik(j∆x) = eπij = (eπi )j = (−1)j
The k = π/∆x mode:
0 1 2 3 4 5 6 7 8 9 10−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
j
eπij

The θ-Method: Stability
This “sawtooth” mode is stable (and hence all modes are stable) if
4µ(1− 2θ) ≤ 2⇐⇒ µ ≤ 1
2(1− 2θ),
Hence for θ ∈ [0, 0.5), the θ-method is conditionally stable

The θ-Method: Stability
0 0.1 0.2 0.3 0.4 0.50
5
10
15
20
25
30
35
40
45
θ
µ
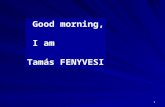
For θ ∈ [0, 0.5), θ-method is stable if µ is in the “green region,”i.e. approaches unconditional stability as θ → 0.5

The θ-Method: Stability
Note that if we set θ to a value in [0, 0.5), then stability time-step
restriction is quite severe: ∆t ≤ (∆x)2
2(1−2θ)
Contrast this to the hyperbolic case where we had ∆t ≤ ∆xc
This is an indication that the system of ODEs that arise fromspatially discretizing the heat equation are stiff

The θ-Method: Accuracy
The truncation error analysis is fairly involved, hence we just givethe result:
T nj ≡
un+1j − un
j
∆t− θ
un+1j−1 − 2un+1
j + un+1j+1
∆x2− (1 − θ)
unj−1 − 2un
j + unj+1
∆x2
= [ut − uxx ] +
[(1
2− θ
)∆tuxxt −
1
12(∆x)2uxxxx
]+
[1
24(∆t)2uttt −
1
8(∆t)2uxxtt
]+
[1
12
(1
2− θ
)∆t(∆x)2uxxxxt −
2
6!(∆x)4uxxxxxx
]+ · · ·
The term ut − uxx in T nj vanishes since u solves the PDE

The θ-Method: Accuracy
Key point: This is a first order method, unless θ = 1/2, in whichcase we get a second order method!
θ-method gives us consistency (at least first order) and stability(assuming ∆t is chosen appropriately when θ ∈ [0, 1/2))
Hence, from Lax Equivalence Theorem, the method is convergent

The Heat Equation
Note that the heat equation models a diffusive process, hence ittends to smooth out discontinuities
Python demo: Heat equation with discontinous initial condition
0
2
4
6
8
10
0
1
2
3
0
0.2
0.4
0.6
0.8
1
xt
This is very different to hyperbolic equations, e.g. the advectionequation will just transport a discontinuity in u0

Elliptic PDEs

Elliptic PDEs
The canonical elliptic PDE is the Poisson equation
In one-dimension, for x ∈ [a, b], this is −u′′(x) = f (x) withboundary conditions at x = a and x = b
We have seen this problem already: Two-point boundary valueproblem!
(Recall that Elliptic PDEs model steady-state behavior, there is notime-derivative)

Elliptic PDEs
In order to make this into a PDE, we need to consider more thanone spatial dimension
Let Ω ⊂ R2 denote our domain, then the Poisson equation for(x , y) ∈ Ω is
uxx + uyy = f (x , y)
This is generally written more succinctly as ∆u = f
We again need to impose boundary conditions (Dirichlet,Neumann, or Robin) on ∂Ω (recall ∂Ω denotes boundary of Ω)

Elliptic PDEs
We will consider how to use a finite difference scheme toapproximate this 2D Poisson equation
First, we introduce a uniform grid to discretize Ω
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
y

Elliptic PDEs
Let h = ∆x = ∆y denote the grid spacing
Then,
I xi = ih, i = 0, 1, 2 . . . , nx − 1,
I yj = jh, j = 0, 1, 2, . . . , ny − 1,
I Ui ,j ≈ u(xi , yj)
Then, we need to be able to approximate uxx and uyy on this grid
Natural idea: Use central difference approximation!

Elliptic PDEs
We have
uxx(xi , yj) =u(xi−1, yj) − 2u(xi , yj) + u(xi+1, yj)
h2+ O(h2),
anduyy (xi , yj) =
u(xi , yj−1) − 2u(xi , yj) + u(xi , yj+1)
h2+ O(h2),
so that
uxx(xi , yj) + uyy (xi , yj) =
u(xi , yj−1) + u(xi−1, yj) − 4u(xi , yj) + u(xi+1, yj) + u(xi , yj+1)
h2+ O(h2)

Elliptic PDEs
Hence we define our approximation to the Laplacian as
Ui ,j−1 + Ui−1,j − 4Ui ,j + Ui+1,j + Ui ,j+1
h2
This corresponds to a “5-point stencil”

Elliptic PDEs
As usual, we represent the numerical solution as a vector U ∈ Rnxny
We want to construct a differentiation matrix D2 ∈ Rnxny×nxny
that approximates the Laplacian
Question: How many non-zero diagonals will D2 have?
To construct D2, we need to be able to relate the entries of thevector U to the “2D grid-based values” Ui ,j

Elliptic PDEs
Hence we need to number the nodes from 1 to nxny — we numbernodes along the “bottom row” first, then second bottom row, etc
Let G denote the mapping from the 2D indexing to the 1Dindexing. From the above figure we have:
G(i , j ; nx) = jnx + i , and hence UG(i ,j ;nx ) = Ui ,j

Elliptic PDEs
Let us focus on node (i , j) in our F.D. grid, this corresponds toentry G(i , j ; nx) of U
Due to the 5-point stencil, row G(i , j ; nx) of D2 will only havenon-zeros in columns
G(i , j − 1; nx) = G(i , j ; nx)− nx , (1)
G(i − 1, j ; nx) = G(i , j ; nx)− 1, (2)
G(i , j ; nx) = G(i , j ; nx), (3)
G(i + 1, j ; nx) = G(i , j ; nx) + 1, (4)
G(i , j + 1; nx) = G(i , j ; nx) + nx (5)
I (2), (3), (4), give the same tridiagonal structure that we’reused to from differentiation matrices in 1D domains
I (1), (5) give diagonals shifted by ±nx

Elliptic PDEs
For example, sparsity pattern of D2 when nx = ny = 6

Elliptic PDEs
Python demo: Solve the Poisson equation
∆u = − exp−(x − 0.25)2 − (y − 0.5)2
,
for (x , y) ∈ Ω = [0, 1]2 with u = 0 on ∂Ω
x
y
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
0.055
0.06

Nonlinear Equations and Optimization

Motivation: Nonlinear Equations
So far we have mostly focused on linear phenomena
I Interpolation leads to a linear system Vb = y (monomials) orIb = y (Lagrange polynomials)
I Linear least-squares leads to the normal equationsATAb = AT y
I We saw examples of linear physical models (Ohm’s Law,Hooke’s Law, Leontief equations) =⇒ Ax = b
I F.D. discretization of a linear PDE leads to a linear algebraicsystem AU = F

Motivation: Nonlinear EquationsOf course, nonlinear models also arise all the time
I Nonlinear least-squares, Gauss–Newton/Levenberg–Marquardt
I Countless nonlinear physical models in nature, e.g.non-Hookean material models2
I F.D. discretization of a non-linear PDE leads to a nonlinearalgebraic system
2Important in modeling large deformations of solids

Motivation: Nonlinear Equations
Another example is computation of Gauss quadraturepoints/weights
We know this is possible via roots of Legendre polynomials
But we could also try to solve the nonlinear system of equationsfor (x1,w1), (x2,w2), . . . , (xn,wn)

Motivation: Nonlinear Equations
e.g. for n = 2, we need to find points/weights such that allpolynomials of degree 3 are integrated exactly, hence
w1 + w2 =
∫ 1
−11dx = 2
w1x1 + w2x2 =
∫ 1
−1xdx = 0
w1x21 + w2x
22 =
∫ 1
−1x2dx = 2/3
w1x31 + w2x
32 =
∫ 1
−1x3dx = 0

Motivation: Nonlinear Equations
We usually write a nonlinear system of equations as
F (x) = 0,
where F : Rn → Rm
We implicity absorb the “right-hand side” into F and seek a rootof F
In this Unit we focus on the case m = n, m > n gives nonlinearleast-squares

Motivation: Nonlinear Equations
We are very familiar with scalar (m = 1) nonlinear equations
Simplest case is a quadratic equation
ax2 + bx + c = 0
We can write down a closed form solution, the quadratic formula
x =−b ±
√b2 − 4ac
2a

Motivation: Nonlinear Equations
In fact, there are also closed-form solutions for arbitrary cubic andquartic polynomials, due to Ferrari and Cardano (∼ 1540)
Important mathematical result is that there is no general formulafor solving fifth or higher order polynomial equations
Hence, even for the simplest possible case (polynomials), the onlyhope is to employ an iterative algorithm
An iterative method should converge in the limit n→∞, andideally yields an accurate approximation after few iterations

Motivation: Nonlinear Equations
There are many well-known iterative methods for nonlinearequations
Probably the simplest is the bisection method for a scalar equationf (x) = 0, where f ∈ C [a, b]
Look for a root in the interval [a, b] by bisecting based on sign of f

Motivation: Nonlinear Equations
#!/usr/bin/python
from math import *
# Function to consider
def f(x):
return x*x-4*sin(x)
# Initial interval: assume f(a)<0 and f(b)>0
a=1
b=3
# Bisection search
while b-a>1e-8:
print a,b
c=0.5*(b+a)
if f(c)<0: a=c
else: b=c
print "# Root at",0.5*(a+b)

Motivation: Nonlinear Equations
1 1.5 2 2.5 3−4
−2
0
2
4
6
8
10
1.932 1.933 1.934 1.935
−0.01
−0.005
0
0.005
0.01
Root in the interval [1.933716, 1.933777]

Motivation: Nonlinear Equations
Bisection is a robust root-finding method in 1D, but it does notgeneralize easily to Rn for n > 1
Also, bisection is a crude method in the sense that it makes no useof magnitude of f , only sign(f )
We will look at mathematical basis of alternative methods whichgeneralize to Rn:
I Fixed-point iteration
I Newton’s method

Optimization

Motivation: Optimization
Another major topic in Scientific Computing is optimization
Very important in science, engineering, industry, finance,economics, logistics,...
Many engineering challenges can be formulated as optimizationproblems, e.g.:
I Design car body that maximizes downforce3
I Design a bridge with minimum weight
3A major goal in racing car design

Motivation: Optimization
Of course, in practice, it is more realistic to consider optimizationproblems with constraints, e.g.:
I Design car body that maximizes downforce, subject to aconstraint on drag
I Design a bridge with minimum weight, subject to a constrainton strength

Motivation: Optimization
Also, (constrained and unconstrained) optimization problems arisenaturally in science
Physics:
I many physical systems will naturally occupy a minimumenergy state
I if we can describe the energy of the system mathematically,then we can find minimum energy state via optimization

Motivation: Optimization
Biology:
I recent efforts in Scientific Computing have sought tounderstand biological phenomena quantitively via optimization
I computational optimization of, e.g. fish swimming or insectflight, can reproduce behavior observed in nature
I this jells with the idea that evolution has been “optimizing”organisms for millions of year

Motivation: Optimization
All these problems can be formulated as: Optimize (max. or min.)an objective function over a set of feasible choices, i.e.
Given an objective function f : Rn → R and a set S ⊂ Rn,we seek x∗ ∈ S such that f (x∗) ≤ f (x), ∀x ∈ S
(It suffices to consider only minimization, maximization isequivalent to minimizing −f )
S is the feasible set, usually defined by a set of equations and/orinequalities, which are the constraints
If S = Rn, then the problem is unconstrained

Motivation: Optimization
The standard way to write an optimization problem is
minx∈S
f (x) subject to g(x) = 0 and h(x) ≤ 0,
where f : Rn → R, g : Rn → Rm, h : Rn → Rp

Motivation: Optimization
For example, let x1 and x2 denote radius and height of a cylinder,respectively
Minimize the surface area of a cylinder subject to a constraint onits volume4 (we will return to this example later)
minx
f (x1, x2) = 2πx1(x1 + x2)
subject to g(x1, x2) = πx21x2 − V = 0
4Heath Example 6.2

Motivation: Optimization
If f , g and h are all affine, then the optimization problem is calleda linear program
(Here the term “program” has nothing to do with computerprogramming; instead it refers to logistics/planning)
Affine if f (x) = Ax + b for a matrix A, i.e. linear plus a constant5
Linear programming mayalready be familiar
Just need to check f (x) onvertices of the feasible region
5Recall that “affine” is not the same as ”linear”, i.e.f (x + y) = Ax + Ay + b and f (x) + f (y) = Ax + Ay + 2b

Motivation: Optimization
If the objective function or any of the constraints are nonlinear thenwe have a nonlinear optimization problem or nonlinear program
We will consider several different approaches to nonlinearoptimization in this Unit
Optimization routines typically use local information about afunction to iteratively approach a local minimum

Motivation: Optimization
In some cases this easily gives a global minimum
−1 −0.5 0 0.5 10
0.5
1
1.5
2
2.5
3

Motivation: Optimization
But in general, global optimization can be very difficult
0 0.2 0.4 0.6 0.8 1−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
We can get “stuck” in local minima!

Motivation: Optimization
And can get much harder in higher spatial dimensions
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
−0.5
0
0.5
1
1.5
2
2.5

Motivation: Optimization
There are robust methods for finding local minimima, and this iswhat we focus on in AM205
Global optimization is very important in practice, but in generalthere is no way to guarantee that we will find a global minimum
Global optimization basically relies on heuristics:
I try several different starting guesses (“multistart” methods)
I simulated annealing
I genetic methods6
6Simulated annealing and genetic methods are covered in AM207

Root Finding: Scalar Case

Fixed-Point Iteration
Suppose we define an iteration
xk+1 = g(xk) (∗)
e.g. recall Heron’s Method from Assignment 0 for finding√a:
xk+1 =1
2
(xk +
a
xk
)This uses gheron(x) = 1
2 (x + a/x)

Fixed-Point Iteration
Suppose α is such that g(α) = α, then we call α a fixed point of g
For example, we see that√a is a fixed point of gheron since
gheron(√a) =
1
2
(√a + a/
√a)
=√a
A fixed-point iteration terminates once a fixed point is reached,since if g(xk) = xk then we get xk+1 = xk
Also, if xk+1 = g(xk) converges as k →∞, it must converge to afixed point: Let α ≡ limk→∞ xk , then7
α = limk→∞
xk+1 = limk→∞
g(xk) = g
(limk→∞
xk
)= g(α)
7Third equality requires g to be continuous

Fixed-Point Iteration
Hence, for example, we know if Heron’s method converges, it willconverge to
√a
It would be very helpful to know when we can guarantee that afixed-point iteration will converge
Recall that g satisfies a Lipschitz condition in an interval [a, b] if∃L ∈ R>0 such that
|g(x)− g(y)| ≤ L|x − y |, ∀x , y ∈ [a, b]
g is called a contraction if L < 1

Fixed-Point Iteration
Theorem: Suppose that g(α) = α and that g is a contractionon [α−A, α+A]. Suppose also that |x0−α| ≤ A. Then thefixed point iteration converges to α.
Proof:|xk − α| = |g(xk−1)− g(α)| ≤ L|xk−1 − α|,
which implies|xk − α| ≤ Lk |x0 − α|
and, since L < 1, |xk − α| → 0 as k →∞. (Note that|x0 − α| ≤ A implies that all iterates are in [α− A, α + A].)
(This proof also shows that error decreases by factor of L eachiteration)