A MATLAB toolbox for optimizing splines -...
1
A MATLAB toolbox for optimizing splines Wannes Van Loock, Goele Pipeleers and Jan Swevers KU Leuven, BE-3001 Leuven, Belgium Depertment of Mechanical Engineering, Division PMA [email protected] 1 Introduction This work presents a new MATLAB toolbox for modeling and solving optimization problems of the following form minimize x f (x) subject to h(x, θ ) ≥ 0, ∀θ ∈ Θ where x are the coefficients of a (polynomial) spline s(x, θ )= ∑ α x α b α (θ ), with basis b α and labeled by the (multi-)index α . The main challenge when solving these problems lies in transforming the constraints that should hold for infinitely many values of θ , so-called semi-infinite constraints, to a (conservative) finite set of constraint. For spline repre- sentable h(x, ·), this toolbox implements an efficient novel relaxation scheme based on the partition of unity of the ba- sis functions and using knot insertion. Spline solutions of the problem can be interpreted as an ap- proximation to the solution of the more general infinite di- mensional problem in which a function s(·) is searched for without preset parameterization. For these problems, splines are a particularly interesting parameterization as it can be shown that splines are a good approximation of smooth functions [1]. The toolbox therefore enables solving many practical that arise in engineering, physics, economics, and so on. In control engineering applications, one can think of optimal control problems, explicit model predictive con- trollers, the design of H ∞ /H 2 gain scheduling controllers and combined structure and control design. A spline 0 1 2 3 4 2 4 6 θ x 1 (θ )+ 2x 2 (θ ) Figure 1: The approximation (solid) converges to the exact solu- tion (dashed) for an increasing number of knots 2 A software toolbox This research develops a MATLAB based software tool that aids the engineer in defining and solving his own spline op- timization problems. The aim is to provide a simple syn- tax, similar to YALMIP’s and to relax the semi-infinite con- straints automatically. To this end, a spline class that over- loads many of MATLAB’s built-in methods has been devel- oped. Consider following optimization problem maximize x 1 (·),x 2 (·) Z 4 0 x 1 (θ )+ 2x 2 (θ )d θ subject to 0 ≤ x 1 (θ ), ∀θ ∈ [0, 4] 0 ≤ x 2 (θ ) ≤ 2, ∀θ ∈ [0, 4] x 1 (θ )+ θ x 2 (θ ) ≤ 2, ∀θ ∈ [0, 4]. The solution to this problem is approximated by a cubic spline with degree d and n equally distributed knots: Bl = BSplineBasis([0, 4], n, d); theta = parameter(1); x = BSpline.sdpvar(Bl, [1, 2]); obj = x(1) + 2 * x(2); con = [x(1) >= 0, x(2) >= 0, x(2) <= 2, x(1) + theta * x(2) <= 2]; sol = optimize(con, -obj.integral); In Figure 1 the dashed line illustrates the exact solution for x 1 + 2x 2 and the solid lines the spline approximation for an increasing number of knots. It is clear that the approxima- tion converges to the exact solution. The presentation will analyze two more involved examples from the field of opti- mal control and combined structure and control design. Acknowledgment IWT ICON project Sitcontrol: Control with Situational Information, IWT SBO project MBSE4Mechatronics: Model-based Systems Engineering for Mechatronics, FWO project G0C4515N: Optimal control of mechatronic systems: a differential flatness based approach. This work also benefits from KU Leuven-BOF PFV/10/002 Center-of-Excellence Optimization in Engineering (OPTEC), from the Belgian Programme on Interuniversity Attraction Poles, initiated by the Belgian Federal Science Policy Office, and from KU Leuven’s Concerted Research Action GOA/10/11 “Global real-time optimal control of autonomous robots and mechatronic systems”. Goele Pipeleers is partially supported by the Research Foundation Flanders (FWO Vlaanderen). References [1] de Boor, Carl. 2001. A Practical Guide to Splines. Springer.
Transcript of A MATLAB toolbox for optimizing splines -...
A MATLAB toolbox for optimizing splines
Wannes Van Loock, Goele Pipeleers and Jan SweversKU Leuven, BE-3001 Leuven, Belgium
Depertment of Mechanical Engineering, Division [email protected]
1 Introduction
This work presents a new MATLAB toolbox for modelingand solving optimization problems of the following form
minimizex
f (x)
subject to h(x,θ)≥ 0,∀θ ∈Θ
where x are the coefficients of a (polynomial) spline
s(x,θ) = ∑α
xα bα(θ),
with basis bα and labeled by the (multi-)index α .
The main challenge when solving these problems lies intransforming the constraints that should hold for infinitelymany values of θ , so-called semi-infinite constraints, to a(conservative) finite set of constraint. For spline repre-sentable h(x, ·), this toolbox implements an efficient novelrelaxation scheme based on the partition of unity of the ba-sis functions and using knot insertion.
Spline solutions of the problem can be interpreted as an ap-proximation to the solution of the more general infinite di-mensional problem in which a function s(·) is searched forwithout preset parameterization. For these problems, splinesare a particularly interesting parameterization as it can beshown that splines are a good approximation of smoothfunctions [1]. The toolbox therefore enables solving manypractical that arise in engineering, physics, economics, andso on. In control engineering applications, one can thinkof optimal control problems, explicit model predictive con-trollers, the design of H∞/H2 gain scheduling controllersand combined structure and control design. A spline
0 1 2 3 4
2
4
6
θ
x 1(θ
)+
2x2(
θ)
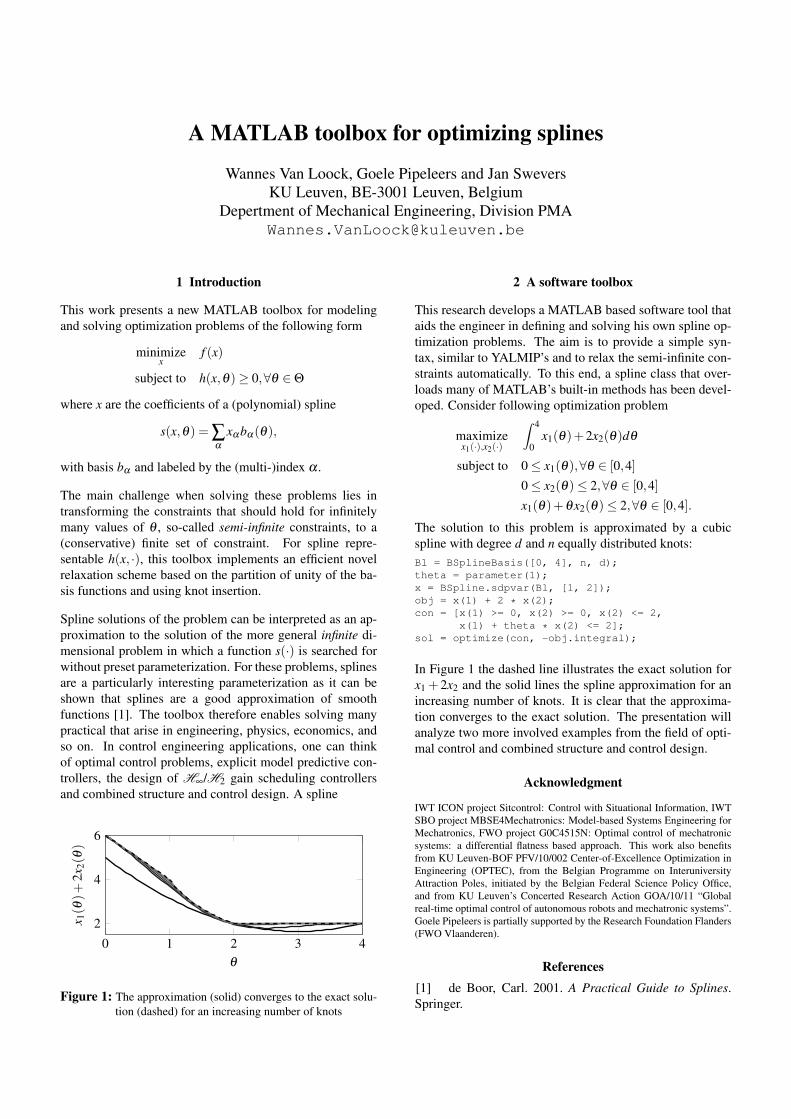
Figure 1: The approximation (solid) converges to the exact solu-tion (dashed) for an increasing number of knots
2 A software toolbox
This research develops a MATLAB based software tool thataids the engineer in defining and solving his own spline op-timization problems. The aim is to provide a simple syn-tax, similar to YALMIP’s and to relax the semi-infinite con-straints automatically. To this end, a spline class that over-loads many of MATLAB’s built-in methods has been devel-oped. Consider following optimization problem
maximizex1(·),x2(·)
∫ 4
0x1(θ)+2x2(θ)dθ
subject to 0≤ x1(θ),∀θ ∈ [0,4]0≤ x2(θ)≤ 2,∀θ ∈ [0,4]x1(θ)+θx2(θ)≤ 2,∀θ ∈ [0,4].
The solution to this problem is approximated by a cubicspline with degree d and n equally distributed knots:Bl = BSplineBasis([0, 4], n, d);theta = parameter(1);x = BSpline.sdpvar(Bl, [1, 2]);obj = x(1) + 2 * x(2);con = [x(1) >= 0, x(2) >= 0, x(2) <= 2,
x(1) + theta * x(2) <= 2];sol = optimize(con, -obj.integral);
In Figure 1 the dashed line illustrates the exact solution forx1 + 2x2 and the solid lines the spline approximation for anincreasing number of knots. It is clear that the approxima-tion converges to the exact solution. The presentation willanalyze two more involved examples from the field of opti-mal control and combined structure and control design.
Acknowledgment
IWT ICON project Sitcontrol: Control with Situational Information, IWTSBO project MBSE4Mechatronics: Model-based Systems Engineering forMechatronics, FWO project G0C4515N: Optimal control of mechatronicsystems: a differential flatness based approach. This work also benefitsfrom KU Leuven-BOF PFV/10/002 Center-of-Excellence Optimization inEngineering (OPTEC), from the Belgian Programme on InteruniversityAttraction Poles, initiated by the Belgian Federal Science Policy Office,and from KU Leuven’s Concerted Research Action GOA/10/11 “Globalreal-time optimal control of autonomous robots and mechatronic systems”.Goele Pipeleers is partially supported by the Research Foundation Flanders(FWO Vlaanderen).
References[1] de Boor, Carl. 2001. A Practical Guide to Splines.Springer.