A Comparison of Two Predator-Prey Models with Holling’s Type I … · 2013-04-12 · A Comparison...
25
A Comparison of Two Predator-Prey Models with Holling’s Type I Functional Response ** Joint work with Mark Kot at the University of Washington ** Presented by Gunog Seo York University / Ryerson University Mathematical Biosciences 212 (2008) 161-179
Transcript of A Comparison of Two Predator-Prey Models with Holling’s Type I … · 2013-04-12 · A Comparison...

A Comparison of Two Predator-Prey Models with Holling’s Type I Functional Response
** Joint work with Mark Kot at the University of Washington **
Presented by Gunog Seo
York University / Ryerson University
Mathematical Biosciences 212 (2008) 161-179

Model Formulation
dN
dT= rN
�1− N
K
�− Φ(N)P
dP
dT= G(N,P )P
P (T ) = Predator population
N(T ) = Prey population
intrinsic rate of growth
of the prey
Carrying capacity
Functional
Response
Numerical
Response
2

Model Formulation
3
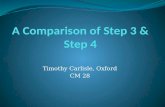
Functional Responses: identified by C. S. Holling (1959, 1965, 1966)
7
a 2a
c/2
c
Type I
N
!(N
)
(a)
a 2a
c/2
c
Type II
N
!(N
)
(b)
a 2a
c/2
c
Type III
N
!(N
)
(c)
Figure 1.2: The three types of functional responses described by C.S. Holling: (a) type I,(b) type II, and (c) type III functional responses. The abscissa and ordinate represent theprey density and the number of prey eaten per predator per unit time. c is a maximum percapita consumption rate and a is a half-saturation constant.
7
a 2a
c/2
c
Type I
N
!(N
)
(a)
a 2a
c/2
c
Type II
N
!(N
)(b)
a 2a
c/2
c
Type III
N
!(N
)
(c)
Figure 1.2: The three types of functional responses described by C.S. Holling: (a) type I,(b) type II, and (c) type III functional responses. The abscissa and ordinate represent theprey density and the number of prey eaten per predator per unit time. c is a maximum percapita consumption rate and a is a half-saturation constant.
Φ(N) =cN
a+NΦ(N) =
cN2
a+N2Φ(N) =
�c2aN if N < 2a
c if N ≥ 2a.
dN
dT= rN
�1− N
K
�− Φ(N)P
dP
dT= G(N,P )P

4
Numerical Responses
Laissez-faire
Leslie
Model Formulation
dN
dT= rN
�1− N
K
�− Φ(N)P
dP
dT= G(N,P )P
G(N,P ) =b
cΦ(N)−m
G(N,P ) = s
�1− P
hN
�

Outline
Laissez-faire Model
Leslie-type Model
dN
dT= rN
�1− N
K
�− ΦI(N)P
dP
dT= P
�b
cΦI(N)−m
�
dP
dT= sP
�1− P
hN
�
dN
dT= rN
�1− N
K
�− ΦI(N)P
Laissez-faire Model with a type I functional response.
Leslie-type Model with a type I functional response.
Nondimensionalization.
Stability analyses of equilibria:
performing a linearized stability analysis,
constructing a Lyapunov function .
Numerical studies.
Laissez-faire and Leslie-type models with arctan functional responses.
Discussion
!I(N) =
!
c
2aN, N < 2a,
c, N ! 2a.
if time permits

D. M. Dubois and P. L. Closset. Patchiness in primary and secondary production in the Southern Bight: a mathematical theory. In G. Persoone and E. Jaspers, editors, Proceedings of the 10th European Symposium on Marine Biology, pp. 211!229, Universa Press, Ostend, 1976.
Y. Ren and L. Han. The predator prey model with two limit cycles. Acta Math. Appl. Sinica (English Ser.), 5: 30!32, 1989.
J. B. Collings. The effects of the functional response on the bifurcation behavior of a mite predator!prey inte- raction model. J. Math. Biol., 36: 149!168, 1997.
G. Dai and M. Tang. Coexistence region and global dynamics of a harvested predator!prey system. SIAM J. Appl. Math., 58: 193!210, 1998.
X. Y. Li and W. D. Wang. Qualitative analysis of predator!prey system with Holling type I functional respon- se. J. South China Normal Univ. (Natur. Sci. Ed.), 29: 712!717, 2004.
B. Liu, Y. Zhang, and L. Chen. Dynamics complexities of a Holling I predator!prey model concerning perio- dic biological and chemical control. Chaos Solitons Fractals, 22: 123!134, 2004.
Y. Zhang, Z. Xu, and B. Liu. Dynamic analysis of a Holling I predator!prey system with mutual interference concerning pest control. J. Biol. Syst., 13:45!58, 2005.
6
Models with Type I Functional Responses

Laissez-faire Modelwith a type I functional response
dP
dT= P
�b
cΦI(N)−m
�
dN
dT= rN
�1− N
K
�− ΦI(N)P

Laissez-faire Model with a type I functional response
Nondimensionalization & Equilibria
8
dN
dT= rN
�1− N
K
�− ΦI(N)P
dP
dT= P
�b
cΦI(N)−m
�
where ΦI(N) =
c
2aN if N < 2a
c if N ≥ 2a
x =N
a, y =
c
raP, t = rT
α =b
r, β =
m
b, γ =
K
a
dx
dt= x
�1− x
γ
�− φI(x)y
dy
dt= αy(φI(x)− β)
where φI(x) =
�x/2, x < 2
1, x ≥ 2
Assuming α > 0, 0 < β < 1, and γ > 2
Eq
uilib
ria E0 = (0, 0),
E1 = (γ, 0),
E2 = (2β, g(2β)) where g(x) =x
φI(x)
�1− x
γ
�

Laissez-faire Model with a type I functional response
Linearized Stability Analysis
9
Assuming α > 0, 0 < β < 1, and γ > 2
Eq
uilib
ria
E0 = (0, 0),
E1 = (γ, 0),
E2 = (2β, g(2β)) where g(x) =x
φI(x)
�1− x
γ
�
J =
�φ�I(x) (g(x)− y) + φI(x)g�(x) −φI(x)
αyφ�I(x) α (φI(x)− β)
�
saddle point
saddle point if φI(γ) > β
stable node if φI(γ) < β

Laissez-faire Model with a type I functional response
Linearized Stability Analysis
10
Assuming α > 0, 0 < β < 1, and γ > 2
Eq
uilib
ria
E0 = (0, 0),
E1 = (γ, 0),
E2 = (2β, g(2β)) where g(x) =x
φI(x)
�1− x
γ
�
saddle point
saddle point if φI(γ) > β
stable node if φI(γ) < β
JE2 =
�βg�(2β) −β
αg(2β)φ�I(2β) 0
�
By Routh-Hurwitz criterion,
the coexistence equilibrium is asymptotically stable.
λ2 − βg�(2β)λ+ αβg(2β)φ�I(2β) = 0
Characteristic Equation

Laissez-faire Model with a type I functional response
Global Stability Analysis of E2
11
Using Harrison’s “Gedankenexperiment” (1979), construct Lyapunov function
V (x, y) =
� x
x∗
α(φI(ξ)− β)
φI(ξ)dξ + α
� g(x∗)
y
g(x∗)− ξ
αξdξ
where g(x) =x
φI(x)
�1− x
γ
�and x∗ = 2β
V (x, y) = V1(x) + V2(x) where V1(x) = α
�(x− x∗)− x∗ ln x
x∗ x < 2,
(2− x∗)− x∗ ln 2x∗ + (1− β)(x− 2), x ≥ 2
V2(x) = g(x∗) lng(x∗)
y+ y − g(x∗)
V
�=
dV
dt
�= α (φI(x)− β) (g(x)− g(x∗)) is continuous at x = 2
V (x, y) is continuous at x = 2 and is zero at the coexistence equilibrium
For all positive x and y, V (x, y) is positive, except at coexistence equilibrium E2.
V < 0 in a neighborhood of E2 if g(x) > g(x∗) for x < x∗ AND g(x) < g(x∗) for x > x∗.

40
0 20
2
x
y
(a)
x! !
0 20
2
x
y
(b)
x! !
D
ULC
SLC
Figure 2.2: A figure illustrating (a) isoclines consistent with global asymptotic stability and(b) a subset of the domain of attraction (D) for an equilibrium where the prey and predatorcoexist in laissez-faire model (2.6). ULC and SLC signify unstable and stable limit cycles.
Laissez-faire Model with a type I functional response
Global Stability Analysis of E2
The coexistence equilibriumis globally asymptotically stable. A subset of the basin
of attraction
D = {(x, y) | V (x, y) < u}
where
u = min {V (0, g(x!)), V (xM , g(x!)), V (x!, 0), V (x!,+!)}
with xM =! !
!
!2! 8(! ! 2")
2when ! > 4 + 4
!
1 ! ".
12

Laissez-faire Model with a type I functional response
Numerical Studies
Poincaré or first return map
(2!, g(2!))
x0
P(x0) = x
1
Poincar e section
: y = 2!1 ! 2!
"
"for x > 2!
13

Laissez-faire Model with a type I functional response
Numerical Studies
Poincaré or first return map44
2 4 6 8
1
2
3
4
5
6
7
8
x0
P(x
0)
(a)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(b)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(c)
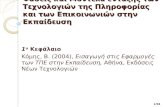
Figure 2.5: Poincare (or first-return) maps for laissez-faire model (2.6) for ! = 2, " = 8,and for three di!erent values of #: (a) # = 0.25, (b) # = 0.65, (c) # = 0.85. Fixed points ofthe Poincare map, which correspond to either equilibrium points or limit cycles of the flow,can be found at the intersections of the Poincare map (dotted curve) and the diagonal line.No limit cycles are found for small #, but two limit cycles occur as # increases.
! = 0.25
α = 2, γ = 8
44
2 4 6 8
1
2
3
4
5
6
7
8
x0
P(x
0)
(a)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(b)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(c)
Figure 2.5: Poincare (or first-return) maps for laissez-faire model (2.6) for ! = 2, " = 8,and for three di!erent values of #: (a) # = 0.25, (b) # = 0.65, (c) # = 0.85. Fixed points ofthe Poincare map, which correspond to either equilibrium points or limit cycles of the flow,can be found at the intersections of the Poincare map (dotted curve) and the diagonal line.No limit cycles are found for small #, but two limit cycles occur as # increases.
! = 0.65
44
2 4 6 8
1
2
3
4
5
6
7
8
x0
P(x
0)
(a)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(b)
2 4 6 8
2
3
4
5
6
7
8
x0
P(x
0)
(c)
Figure 2.5: Poincare (or first-return) maps for laissez-faire model (2.6) for ! = 2, " = 8,and for three di!erent values of #: (a) # = 0.25, (b) # = 0.65, (c) # = 0.85. Fixed points ofthe Poincare map, which correspond to either equilibrium points or limit cycles of the flow,can be found at the intersections of the Poincare map (dotted curve) and the diagonal line.No limit cycles are found for small #, but two limit cycles occur as # increases.
! = 0.85
14

Laissez-faire Model with a type I functional response
Numerical Studies Bifurcation Diagrams (using XPPAUT)
46
0.5 0.6 0.7 0.8 0.9
2
3
4
5
6
(b)
!
Norm
CFB
6 8 10 12 14 16
2
4
6
8
10
(c)
"
Norm
CFB
0 2 4 6 8 10 122
2.5
3
3.5
4
4.5
5
(a)
#
Norm
CFB
CFB
Figure 2.6: Bifurcation diagrams for laissez-faire model (2.6). The L2 norms of stable limitcycles (filled circles), unstable limit cycles (open circles), and stable coexistence equilibria(thick solid line) are computed for di!erent values of (a) ! (" = 0.7, # = 8), (b) " (! = 2,# = 8), and (c) # (! = 2, " = 0.7). Two global cyclic-fold bifurcations occur as I increase(a) ! and one cyclic-fold bifurcation appears as I increase (b) " or (c) #.
46
0.5 0.6 0.7 0.8 0.9
2
3
4
5
6
(b)
!
Norm
CFB
6 8 10 12 14 16
2
4
6
8
10
(c)
"
Norm
CFB
0 2 4 6 8 10 122
2.5
3
3.5
4
4.5
5
(a)
#
Norm
CFB
CFB
Figure 2.6: Bifurcation diagrams for laissez-faire model (2.6). The L2 norms of stable limitcycles (filled circles), unstable limit cycles (open circles), and stable coexistence equilibria(thick solid line) are computed for di!erent values of (a) ! (" = 0.7, # = 8), (b) " (! = 2,# = 8), and (c) # (! = 2, " = 0.7). Two global cyclic-fold bifurcations occur as I increase(a) ! and one cyclic-fold bifurcation appears as I increase (b) " or (c) #.
46
0.5 0.6 0.7 0.8 0.9
2
3
4
5
6
(b)
!
Norm
CFB
6 8 10 12 14 16
2
4
6
8
10
(c)
"
Norm
CFB
0 2 4 6 8 10 122
2.5
3
3.5
4
4.5
5
(a)
#
Norm
CFB
CFB
Figure 2.6: Bifurcation diagrams for laissez-faire model (2.6). The L2 norms of stable limitcycles (filled circles), unstable limit cycles (open circles), and stable coexistence equilibria(thick solid line) are computed for di!erent values of (a) ! (" = 0.7, # = 8), (b) " (! = 2,# = 8), and (c) # (! = 2, " = 0.7). Two global cyclic-fold bifurcations occur as I increase(a) ! and one cyclic-fold bifurcation appears as I increase (b) " or (c) #.
47
0.1 0.2 0.3 0.4 0.5 0.6 0.7
7.8
8
8.2
8.4
8.6
8.8
9 ! = 2! = 0.5
! = 7
(a)
!
"
0.4 0.5 0.6 0.7 0.8 0.90
2
4
6
8
10
"=
8
"=
8.5
"=
7.7
(b)
!
#
7.8 7.85 7.9 7.95 8 8.05 8.1 8.150
2
4
6
8
10
#=
0 .68
#=
0 .7
#=
0.7
2
(c)
"
#
Figure 2.7: Two-parameter bifurcation diagrams for laissez-faire model (2.6). The curvesindicate cyclic-fold bifurcations. Two limit cycles occur above each curve in (a) and to theright of each curve in (b) and (c).
47
0.1 0.2 0.3 0.4 0.5 0.6 0.7
7.8
8
8.2
8.4
8.6
8.8
9 ! = 2! = 0.5
! = 7
(a)
!
"
0.4 0.5 0.6 0.7 0.8 0.90
2
4
6
8
10"
=8
"=
8.5
"=
7.7
(b)
!
#
7.8 7.85 7.9 7.95 8 8.05 8.1 8.150
2
4
6
8
10
#=
0 .68
#=
0 .7
#=
0.7
2
(c)
"
#
Figure 2.7: Two-parameter bifurcation diagrams for laissez-faire model (2.6). The curvesindicate cyclic-fold bifurcations. Two limit cycles occur above each curve in (a) and to theright of each curve in (b) and (c).
47
0.1 0.2 0.3 0.4 0.5 0.6 0.7
7.8
8
8.2
8.4
8.6
8.8
9 ! = 2! = 0.5
! = 7
(a)
!
"
0.4 0.5 0.6 0.7 0.8 0.90
2
4
6
8
10
"=
8
"=
8.5
"=
7.7
(b)
!
#
7.8 7.85 7.9 7.95 8 8.05 8.1 8.150
2
4
6
8
10
#=
0 .68
#=
0 .7
#=
0.7
2
(c)
"
#
Figure 2.7: Two-parameter bifurcation diagrams for laissez-faire model (2.6). The curvesindicate cyclic-fold bifurcations. Two limit cycles occur above each curve in (a) and to theright of each curve in (b) and (c).
! = 0.7, " = 8 ! = 2, " = 8 ! = 2, " = 0.7
Two limit cycles occur
above each curve.
Two limit cycles occur
to the right of each curve.
Two limit cycles occur
to the right of each curve.
15

Leslie-type Modelwith a type I functional response
dP
dT= sP
�1− P
hN
�
dN
dT= rN
�1− N
K
�− ΦI(N)P

Leslie-type Model with a type I functional response
Nondimensionalization & Equilibria
17
dN
dT= rN
�1− N
K
�− ΦI(N)P
where ΦI(N) =
c
2aN if N < 2a
c if N ≥ 2a
x =N
a, y =
c
raP, t = rT
dx
dt= x
�1− x
γ
�− φI(x)y
where φI(x) =
�x/2, x < 2
1, x ≥ 2
Assuming
dP
dT= sP
�1− P
hN
�
A =s
r, B =
ch
r, γ =
K
a
dy
dt= Ay
�1− y
Bx
�
A > 0, B > 0, and γ > 2
focus on the dynamics in 0 < x(t) ≤ γ , where a unique coexistence equilibrium exists.
Eq
uilib
ria �E1 = (γ, 0)
�E2 = (x∗, y∗)
where x∗ =
�2γ
Bγ+2 , γ(1−B) < 2,
γ(1−B), γ(1−B) ≥ 2
y∗ = Bx∗ = g(x∗)
with g(x) =x
φI(x)
�1− x
γ
�

Leslie-type Model with a type I functional response
Stability Analysis
18
dx
dt= x
�1− x
γ
�− φI(x)y
where φI(x) =
�x/2, x < 2
1, x ≥ 2
dy
dt= Ay
�1− y
Bx
�
x! =
!
2!B!+2
, !(1 ! B) < 2,
!(1 ! B) , !(1 ! B) " 2.
Eq
uilib
ria
�E1 = (γ, 0)�E2 = (x∗, y∗)
J =
�φ�I(x)(g(x)− y) + φI(x)g�(x) −φI(x)
AB
� yx
�2A�1− 2y
Bx
��
saddle point
E2 = (x!, y!)!
The left (J!
) and right (J+) Jacobians evaluated at E2
where 0 < x!
< 2 or 2 < x!
< !,
J±
!
!
!
(x!,y!)=
"
!I(x!)g"±(x!) ! !I(x!)AB ! A
#
with y! = g(x!) =x!(1 ! x!/!)
"I(x!)and
!
g"#
(x!) = ! 2/!, 0 < x! < 2,
g"+(x!) = 1 ! 2x!/!, 2 < x! < !.
!2 + !(A ! "I(x!)g"±(x!)) + A"I(x
!)!
B ! g"±(x!)"
= 0> 0
For 2 < x! < !/2, Asymptotically stable where 0 < x∗ < 2 or γ/2 ≤ x∗ < γ
Unstable if A < g�(x∗)
Stable if A > g�(x∗)

Leslie-type Model with a type I functional response
Stability Analysis
0 2
x
y
E2
E1
!!/2
!"#$%&'((!)(*+#,
!"#-./0"%&'((!)(*+#,
The generalized Jacobian of Clarke (1998)
J! = {(1 ! q)J!
+ qJ+ ," 0 # q # 1}
J±
!
!
!
(x!,y!)=
"
!I(x!)g"±(x!) ! !I(x!)AB ! A
#
: a convex combination of the left and right Jacobian,
! J! =
!
J11!
" 1
AB " A
"
with J11
! = qB + (B ! 1) where 0 < B < 1 and 0 " q " 1.
Characteristic Equation: λ2 −�J11Σ −A
�λ+A(B − J11
Σ ) = 0
⇒ λ1,2 =(J11
Σ −A)± i�4AB − (J11
Σ +A)2
2
A discontinuous Hopf bifurcation (Leine and Nijmeijer; 2004) is expected
when the eigenvalues are imaginary(J11
! = A) i.e., when q =A ! B + 1
Bwhere A " 2B!1 < 1.
19

Leslie-type Model with a type I functional response
The generalized Jacobian of Clarke
The generalized Jacobian of Clarke at x!
= 2
!1 !2A = 0.1 q = 0 (!), q = 1 (!)
52
!0.5 0 0.5
!0.2
0
0.2
(a)
!0.5 0 0.5
!0.2
0
0.2
(b)
!0.5 0 0.5
!0.2
0
0.2
(c)
!0.5 0 0.5
!0.2
0
0.2
(d)
!0.5 0 0.5
!0.2
0
0.2
(e)
!0.5 0 0.5
!0.2
0
0.2
(f)
Figure 2.8: Paths of eigenvalues of generalized Jacobian (2.38) evaluated at x = 2 in Leslie-type model (2.26) for A = 0.1: (a) B = 0.28, (b) B = 0.3, (c) B = 0.43, (d) B = 0.5, (e)B = 0.71, and (f) B = 0.85. The abscissa and the ordinate are the real and the imaginaryparts of !. Arrows indicate the direction of eigenvalues that start at ! (q = 0) and thatend at ! (q = 1).
52
!0.5 0 0.5
!0.2
0
0.2
(a)
!0.5 0 0.5
!0.2
0
0.2
(b)
!0.5 0 0.5
!0.2
0
0.2
(c)
!0.5 0 0.5
!0.2
0
0.2
(d)
!0.5 0 0.5
!0.2
0
0.2
(e)
!0.5 0 0.5
!0.2
0
0.2
(f)
Figure 2.8: Paths of eigenvalues of generalized Jacobian (2.38) evaluated at x = 2 in Leslie-type model (2.26) for A = 0.1: (a) B = 0.28, (b) B = 0.3, (c) B = 0.43, (d) B = 0.5, (e)B = 0.71, and (f) B = 0.85. The abscissa and the ordinate are the real and the imaginaryparts of !. Arrows indicate the direction of eigenvalues that start at ! (q = 0) and thatend at ! (q = 1).
B = 0.43
B = 0.85
20

56
0 2 4 60
0.5
1
1.5
2
2.5
x
y
(a)
DL
0 2 4 6 80
0.5
1
1.5
2
2.5
x
y
(b)
DL
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
4
x
y
(c)
DL
ULC
SLC
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
x
y(d)
DL
Figure 2.11: Phase portraits showing subsets of the domain of attraction (DL) for thecoexistence equilibrium of Leslie-type model (2.26) obtained using Lyapunov function (2.43).The coexistence equilibria in (a), for A = 1, B = 2, ! = 6, and (b), for A = 1, B = 0.18,! = 9, are globally asymptotically stable. A subset of the domain of attraction ((c) and(d)) can be found when g(x) > y! for x < x! and g(x) < y! for x > x!. For (c), A = 0.05,B = 1.4, ! = 10.5, while for (d), A = 0.1, B = 0.35, ! = 10. Dashed lines are the preynull-clines and solid lines are the predator null-clines. ULC and SLC signify unstable andstable limit cycles. The dotted horizontal line is y = g(x!).
Leslie-type Model with a type I functional response
Numerical Studies
56
0 2 4 60
0.5
1
1.5
2
2.5
x
y
(a)
DL
0 2 4 6 80
0.5
1
1.5
2
2.5
x
y
(b)
DL
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
4
x
y
(c)
DL
ULC
SLC
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
x
y
(d)
DL
Figure 2.11: Phase portraits showing subsets of the domain of attraction (DL) for thecoexistence equilibrium of Leslie-type model (2.26) obtained using Lyapunov function (2.43).The coexistence equilibria in (a), for A = 1, B = 2, ! = 6, and (b), for A = 1, B = 0.18,! = 9, are globally asymptotically stable. A subset of the domain of attraction ((c) and(d)) can be found when g(x) > y! for x < x! and g(x) < y! for x > x!. For (c), A = 0.05,B = 1.4, ! = 10.5, while for (d), A = 0.1, B = 0.35, ! = 10. Dashed lines are the preynull-clines and solid lines are the predator null-clines. ULC and SLC signify unstable andstable limit cycles. The dotted horizontal line is y = g(x!).
A = 1, B = 2, γ = 6 A = 1, B = 0.18, γ = 9
A = 0.05, B = 1.4, γ = 10.5 A = 0.1, B = 0.35, γ = 10
21

Leslie-type Model with a type I functional response
Numerical Studies: Two-parameter bifurcation diagrams
61
0.5 1 1.5 2 2.5 3 3.5
6
8
10
12
14
16
18
(a)
B
!
L0
L0
L1
L2
H+
DHBCFB
5 10 15 20 25 300
0.2
0.4
0.6
0.8
!
A
(c)
L0
L1
L2
0.4 0.6 0.8 1 1.2 1.4 1.6
0.1
0.2
0.3
0.4
0.5
0.6
B
A
(b)
L0
L0
L1
L2
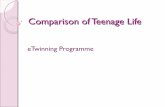
Figure 2.15: Two-parameter bifurcation curves for Leslie-type model (2.26) for (a) A = 0.1,(b) ! = 10, and (c) B = 0.9. H+ stands for a super-critical Hopf bifurcation, DHB for adiscontinuous Hopf bifurcation, and CFB for a cyclic-fold bifurcation. The parameter planeis divided into regions marked Li (i = 0, 1, 2): the subscript indicates the number of limitcycles that encircle the coexistence equilibrium E2.
61
0.5 1 1.5 2 2.5 3 3.5
6
8
10
12
14
16
18
(a)
B
!
L0
L0
L1
L2
H+
DHBCFB
5 10 15 20 25 300
0.2
0.4
0.6
0.8
!
A
(c)
L0
L1
L2
0.4 0.6 0.8 1 1.2 1.4 1.6
0.1
0.2
0.3
0.4
0.5
0.6
B
A
(b)
L0
L0
L1
L2
Figure 2.15: Two-parameter bifurcation curves for Leslie-type model (2.26) for (a) A = 0.1,(b) ! = 10, and (c) B = 0.9. H+ stands for a super-critical Hopf bifurcation, DHB for adiscontinuous Hopf bifurcation, and CFB for a cyclic-fold bifurcation. The parameter planeis divided into regions marked Li (i = 0, 1, 2): the subscript indicates the number of limitcycles that encircle the coexistence equilibrium E2.
61
0.5 1 1.5 2 2.5 3 3.5
6
8
10
12
14
16
18
(a)
B
!
L0
L0
L1
L2
H+
DHBCFB
5 10 15 20 25 300
0.2
0.4
0.6
0.8
!
A
(c)
L0
L1
L2
0.4 0.6 0.8 1 1.2 1.4 1.6
0.1
0.2
0.3
0.4
0.5
0.6
B
A(b)
L0
L0
L1
L2
Figure 2.15: Two-parameter bifurcation curves for Leslie-type model (2.26) for (a) A = 0.1,(b) ! = 10, and (c) B = 0.9. H+ stands for a super-critical Hopf bifurcation, DHB for adiscontinuous Hopf bifurcation, and CFB for a cyclic-fold bifurcation. The parameter planeis divided into regions marked Li (i = 0, 1, 2): the subscript indicates the number of limitcycles that encircle the coexistence equilibrium E2.
A = 0.1
B = 0.9
The parameter plane is divided into regions marked Li (i = 0, 1, 2) : the subscript indicates the number of limit cycles that encircle the coexistence equilibrium
γ = 10
22

Summary Laissez-faire & Leslie-type models with Type I
functional Responses Two limit cycles: Cyclic-fold bifurcations
Leslie-type model with Type I functional Responses
At : the generalized Jacobian of Clarke (1998)x∗ = 2
J! = {(1 ! q)J!
+ qJ+ ," 0 # q # 1}
Discontinuous Hopf bifurcation
Super-critical Hopf and Cyclic-fold bifurcations
q =A−B + 1
BA ≤ 2B − 1 < 1when where
23

Future Research Projects
A predator!prey model with a type I functional response including an Allee effect in the growth rate of the prey.
A predator!predator!prey model with two predators characterized by type I and other possible functional responses.
A Delay-differential Equation
24

Thank you