8 Propeler - unizg.hr...3 propelere koji imaju i dodatno uvijanje ∆1β(r) i okretanje ∆2β kraka...
28
1 8 PROPELER 8.1 Uvod Cilj ovog poglavlja je odrediti pogonsku silu T koju razvija propeler kao i potreban moment Q koji je potreban za pokretanje propelera. Time ćemo odrediti i koeficijent učinkovitosti. Pogonsku silu koju razvija propeler kao i potreban moment za pokretanje propelera određujemo pri zadanoj kutnoj brzini π 2 ⋅ = Ω n gdje je n [1/s] brzina okretanja propelera (broj okretaja u sekundi). Pri izučavanju pogonske sila i potrebnog momenta postavljamo koordinatni sustav duž ose propelera u odnosu na koji se propeler okreće. Brzina leta zrakoplova V (ili brzinu napredovanja) jednaka je brzini neporemećene struje zraka u odnosu na taj koordinatni sustav. tj. to je brzina neporemećenog zraka. 8.1.1 Konstruktivne karakteristike propelera Propeler je dio helikoidalne površine. Ta površina nastaje istodobnom rotacijom i translacijom duljine R. Kraj te duljine A kreće se po osi okomitoj na tu duljinu, a drugi kraj B rotira oko te iste osi. g β g H R A B 1 B 1 A 2 A 3 A 2 B 3 B x y z Slika 1. Helikoida koraka g H na cilindru polumjera R
Transcript of 8 Propeler - unizg.hr...3 propelere koji imaju i dodatno uvijanje ∆1β(r) i okretanje ∆2β kraka...

1
8 PROPELER
8.1 Uvod Cilj ovog poglavlja je odrediti pogonsku silu T koju razvija propeler kao i potreban moment Q
koji je potreban za pokretanje propelera. Time ćemo odrediti i koeficijent učinkovitosti.
Pogonsku silu koju razvija propeler kao i potreban moment za pokretanje propelera
određujemo pri zadanoj kutnoj brzini π2⋅=Ω n gdje je n [1/s] brzina okretanja propelera
(broj okretaja u sekundi). Pri izučavanju pogonske sila i potrebnog momenta postavljamo
koordinatni sustav duž ose propelera u odnosu na koji se propeler okreće. Brzina leta
zrakoplova V (ili brzinu napredovanja) jednaka je brzini neporemećene struje zraka u odnosu
na taj koordinatni sustav. tj. to je brzina neporemećenog zraka.
8.1.1 Konstruktivne karakteristike propelera
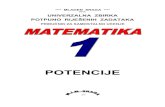
Propeler je dio helikoidalne površine. Ta površina nastaje istodobnom rotacijom i
translacijom duljine R. Kraj te duljine A kreće se po osi okomitoj na tu duljinu, a drugi kraj B
rotira oko te iste osi.
gβ
gH
R
A
B
1B
1A2A
3A
2B
3B
x
y
z
Slika 1. Helikoida koraka gH na cilindru polumjera R

2
Pri tome bitno je da postoji proporcionalnost između prijeđenog puta točke A i kuta okretanja
dulji AB. Točka B opisuje prostornu krivulju koju nazivamo helikoida kao na slici 8-1. Dok se
duljina R okrene za cijeli krug opsega Rπ2 , ona se istodobno pomjeri duž osi za gH . Zato je
kut helikoide
D
HR2
Htg gg
g ππβ ==
Duljinu gH nazivamo korak helikoide (indeks g podsjeća na riječ geometrija). Ako
promatramo neku drugu točku C između AB na udaljenosti Rr < od A točke, ona opisuje
tzv. lokalnu helikoidu koja ima isti korak ali većeg nagiba jer je njen nagib
r2H
tg gg π
β = .
Konačno, uočimo da je kut helikoide gβ utoliko veći, ukoliko je polumjer r na kome ona leži
manji.
Zamislimo da na duljinu AB postavimo krilo tako da geometrijsko mjesto četvrtina
tetiva leži na duljini AB. To krilo treba biti uvijeno da bi pravac nultog uzgona profila bio na
pravcu tangente lokalne helikoide. Kut uvijanja koji je jednak kutu lokalne helikoide gβ ,
utoliko je veći ukoliko je presjek bliži osi propelera. Zato što bi u okolini ose propelera taj kut
gβ bio π/2, propeleri imaju oko ose glavčinu te je
Rrr ≤≤min
Pored tog geometrijskog kuta ( )rgβ , profil na mjestu r može biti dodatno nagnut još
za vrijednost β∆ . Ako je to konstruktivno izvedeno dodatnim uvijanjem kraka propelera
onda ta dodatna vrijednost može biti promjenljiva od presjeka do presjeka tj. ( )r1β∆ . Ako se
ta dodatna vrijednost ostvaruje rotacijom kraka propelera oko duljine AB za β∆2 onda je ona
konstantna po presjeku ali se može mijenjati u letu po želji. Tako u općem slučaju imamo
( ) ( ) β∆β∆ββ 21g rr ++=
Uočimo da je zbroj ( ) ( )rr 1g β∆β + realiziran konstrukcijom propelera. Drugim riječima duž
kraka propelera konstruktivni kut uvijanja je promjenljiv i uvijek isti. Nasuprot tomu β∆2 je
konstanta za koju je dodatno okrenut cijeli krak propelera oko duži AB. Ovo okretanje cijelog
kraka propelera osigurava posebni mehanizam. Za takav propeler kažemo da ima promjenljiv
korak. To znači da imamo propeler s konstantnim korakom u svim presjecima kraka samo ako
nemamo dodatnog uvijanja ( )r1β∆ i ako nema okretanja kraka propelera β∆2 . Zato za

3
propelere koji imaju i dodatno uvijanje ( )r1β∆ i okretanje β∆2 kraka oko AB, definiramo
lokalni geometrijski korak :
βπ tan⋅= r2H g .
Ovako definiran korak propelera je promjenljiv duž kraka propelera, pa se zato upotrebljava
nominalni geometrijski korak koji je jednak lokalnom geometrijskom koraku za referentni
presjek. Obično je referentni presjek na radijusu 750Rrref .= (rjeđe 0.7).
Osim promijene lokalnog kuta β, može se duž kraka propelera mijenjati i aeroprofil.
Uobičajeno je da svi presjeci kraka propelera pripadaju jednoj istoj seriji aeroprofila. Zato je
dovoljno pri opisu kraka propelera poznavati seriju aeroprofila, te promjenu tetive ( )rc i
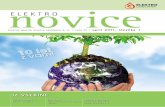
debljine ( )rt duž kraka. Time je krak propelera u potpunosti definiran. Jedan primjer
konstruktivnih karakteristika propelera dan je na slici (8-2) za NACA propelere 5868-9 (s
aeroprofilom Clark Y) i 5868-R6 (s aeroprofilom R.A.F. 6).
ct
Dc
Dc
Dc
ct
DH
DH
Slika 2. Primjer definicije geometrija kraka NACA propelera 5868-9 i 5868-R6

4
Konačno pored ovako definirane konstrukcije kraka potrebno je definirati i broj krakova
propelera N . Prema smjeru okretanja propelera propeleri mogu biti lijevi i desni. Promatrano
iz smjera kretanja (pogled u vrh osi x), propeler je desni ako je smjer okretanja matematički
pozitivan (suprotan smjeru kazaljke na satu). U suprotnom radi se o lijevim propeleru.
Za geometrijsku konstrukciju propelera još je bitan njegov položaj u odnosu na motor.
Promatrano u smjeru leta (duž osi x zrakoplova), vučni propeler nalazi se ispred motora dok
je potisni propeler smješten iza motora.
8.1.2 Kinematika propelera
Brzina neke točke propeleru koja ima vektor položaja rr (mjereno duž kraka od ose propelera
do presjeka) imat će brzinu koja je zbroj prijenosne brzine leta zrakoplova Vr
i brzine uslijed
rotacije propelera rVtrrr
×= Ω :
rVVRrrrr
×+= Ω . To je brzina točke propelera u odnosu na zraka, a brzina zraka u odnosu na točku propelera je
ta ista brzina samo suprotnog smjera. Tako definirana brzina s promijenjenim znakom
predstavlja brzinu optjecanja profila u presjeku r. Pri tome pretpostavljamo da nema vjetra i
da se smjer gibanja zrakoplova poklapa s osi rotacije propelera. Intenzitet je te brzine u
presjeku r prema slici (8-3) :
2222 )( VrVVV tR +⋅Ω=+= .
Od interesa je kut φ ove brzine u odnosu na ravninu rotacije. Taj kut nazivamo kut
napredovanja. Trag koga čine vrtložne niti iza kraka propelera nagnut je prema ravni rotacije
pod tim kutom.
r
V⋅
=Ω
φtan .
Slika 3. Kut napredovanja φ u presjeku kraka na radijusu r:

5
Uočimo da kut napredovanja φ također zavisi od r tj. on je također promjenljiv od presjeka
do presjeka duž kraka propelera. Ovako definiran kut napredovanja ne uzima u obzir
inducirane brzine u presjeku r za razliku od stvarnog kuta napredovanja Θ o kome će biti
riječi kasnije.
Analogno geometrijskom koraku propelera gg r2H βπ tan⋅= , definira se i
aerodinamički korak (effective pitch)
φπ tgr2H ⋅⋅=
te predstavlja pređeni put ose propelera za vrijeme jednog obrta propelera. Jasno je da je taj
pređeni put isti za sve točke propelera.
. nV
rVr2H =⋅=Ω
π .
gdje je n broj obrtaja propelera u s. Razlika između Hg geometrijskog koraka i H
aeodinamičkog koraka naziva se klizanje.
Između ukupne aerodinamičke brzine RVr
i linije nultog uzgona aeroprofila u
promatranom presjeku nalazi se lokalni napadni kut α . On treba biti pozitivan da bi sila
uzgona na kraku dala pozitivnu pogonsku silu propelera. Sa smanjivanjem r udaljenosti od osi
rotacije, smanjuje se komponenta brzine rVt ⋅Ω= , što uz jednaku V brzinu napredovanja
povlači povećanje kuta napredovanja φ . Kako bi zadržali napadni kut pozitivan nužno je
povećati kut uvijanja β . Na taj način osigurava se pozitivan napadni kut na svakom presjeku
kraka propelera. Poželjno je da napadni kut, na svakom presjeku kraka, bude između 2° i 4°,
dok su kutovi veći od 15° neefikasni budući da dolazi do gubitka uzgona aeroprofila (stall).
Najvažniji parametar rada profila koji uzima u obzir i brzinu okretanja i brzinu
napredovanja propelera je koeficijent napredovanja ili korak napredovanja (advance ratio)
definira se kao
nDVJ = .
8.2 Teorija diska (pojednostavljena teorija propelera)
8.2.1 Polazne pretpostavke
Klasična teorija količine gibanja propelera poznata kao teorija diska daje osnovne koncepte
performansi propelera. Originalna teorija kako ju je formulirao Rankine 1865. godine opisuje

6
propeler kao beskonačno tanki disk preko kojeg se statički tlak skokovito mijenja.
Pretpostavke ovog modela su:
• brzina na disku je uniformna,
• tlak na disku je uniforman,
• rotacija struje zraka koji prolazi kroz propeler je zanemarena,
• struja zraka koja prolazi kroz disk odvaja se od okolnog zraka zamišljenom
strujnom cijevi,
• strujanje je nestlačivo.
Zamislimo strujnu cijev kroz koju struji zrak koji prolazi kroz disk. Primjenit ćemo princip
relativnog gibanja. Umjesto da se propeler giba brzinom V u zrku koji stoji, promatrat ćemo
propeler koji stoji a nailazi zrak brzinom V (iz suprotnog pravca). U tom zraku uočimo
strujnu cijev koja prolazi kroz disk propelera kao na slici (8-4). Neka je presjek 1
neporemećena struja zraka ispred diska. U tom presjeku poznajemo sve karakteristike zraka:
VVpp
1
a1
== ,
,ρ.
Presjek 2 je neposredno ispred diska, presjek 3 neposredno iza diska. Presjek 4 je niz struju
gdje je opet tlak jednak atmosferskom tlaku a4 pp =
a1
1
ppA
= a4
4
ppA
=32 ppA≠
VV1 =
32 VV =VVV4 ∆+=T
1
2 34
Slika 4 Strujna cijev kroz disk propelera (presjek 2 i 3)

7
8.2.2 Primjena jednadžbe kontinuiteta
Na pretpostavljenu strujnu cijev sa slike (8-5) možemo primijeniti jednadžbu kontinuiteta, tj.
jednadžbu o konstantnom protoku duž cijevi zato što nema izvora ni ponora u cijevi od
presjeka 1 do 4. Prema tome maseni protok m& isti kroz u svim presjecima strujne cijevi. Tako
dobivamo da je
444333222111 VAVAVAVAm ρρρρ ====& .
Budući da je pretpostavljeno nestlačivo strujanje gustoća je ista u svim presjecima te
jednadžba kontinuiteta dobiva oblik :
44332211 VAVAVAVA === .
Kako je 21 AAA == iz ove jednadžbe slijedi da se brzina zraka pri prolasku kroz disk ne
mijenja
32 VV = .
a maseni protok je
2AVm ρ=&
8.2.3 Primjena jednadžbe o količini gibanja
Sila kojom propeler djeluje na zrak je
( )23 ppAT −=
Prema jednadžbi količine gibanja [14], ta je sila jednaka razlici impulsnih funkcija kroz dsik
23 IIT −= .
Kako od presjeka 1 do 2 nemamo djelovanje vanjskih sila 12 II = i isto tako 43 II = , pa je
14 IIT −= .
Impulsne funkcije na ulazu i na izlazu iz strujne cijevi imaju vrijednost
mVAVI 12
11 &== ρ
mVAVI 442
44 &== ρ
Tako dobivamo da je sila
( )14 VVmT −= & ,
ili s obzirom da je AVm 2ρ=& i VVV 14 ∆=− , dobivamo
VAVT 2∆ρ= .

8
gdje je, podsjetimo se, A površina diska, 2V brzina zraka kroz disk (koja je različita od brzine
leta diska), a V∆ prirast brzine zraka od ulaznog do izlaznog presjeka u kojima je tlak
neporemećen.
8.2.4 Primjena Bernulijeve jednadžbe
Bernulijeva jednadžba ne može se primijeniti na cijelu strujnu cijev zašto što se u ravni diska
zraku daje energija. Ona se može primijeniti za strujanje do diska i od diska. Tako za strujanje
ispred diska (slika 8-4) Bernulijeva jednadžba daje jednakost:
222
211 2
121 VpVp ρρ +=+ ,
a za strujanje iza diska
244
233 2
121 VpVp ρρ +=+
Kako je tlak na presjecima 1 i 4 jednak atmosferskom tlaku: a41 ppp == a brzine su jednake
s jedne i druge strane diska 32 VV = , slijedi:
)(21 2
12
423 VVpp −=− ρ .
S obzirom da je pogonska sila na disku ( )23 ppAT −= , dobivamo
( )21
24 VVA
21T −= ρ .
8.2.5 Pogonska sila i snaga i ubrzanje struje zrake
Izjednačavanjem izraza za pogonsku silu na temelju jednadžbe kontinuiteta i na temelju
Bernulijeve jednadžbe (4) i (9)
( )142 VVAVT −= ρ
( )21
24 VVA
21T −= ρ
dobiva se da je brzina zraka kroz disk propelera
2VVVV
21V 42
∆+=+= )( .
što znači da se zrak jednako ubrzan ispred i iza diska, jer je na ulazu u cijev u presjeku 1
brzina zraka VV1 = , u presjeku diska 32 V2VVV =+= ∆ , a na kraju cijevi VVV4 ∆+=
(slika 8-4). Dakle teorija diska pokazuje da je povećanje brzine struje iza diska dva puta veće
od povećanja brzine na samom disku.
Jednadža za pogonsku silu koju smo dobili primjenom jednadžbe o količini gibanja (4)

9
( )142 VVAVT −= ρ
s ovim brzinama dobiva oblik:
VVVAT ∆∆+= )21(ρ
a iz nje možemo reći da je porast brzine zraka kroz disk propelera:
VAT2VV 2 −+=ρ
∆ .
Potrebna snaga na propeleru jednaka je povećanju kinetičke energije masenog protoka
zraka kroz propeler
( )[ ]
+=−+=
2VVVmVVVm
21P 22 ∆∆∆ && .
a kako je VmT ∆&= bit će
+=
2VVTP ∆ .
8.2.6 Učinkovitost idealnog propelera
Ova teorija uzima u obzir samo gubitke zbog ubrzanja struje zraka VT∆2/1 . Ona ne
uključuje druge gubitke, kao npr. one uzrokovane trenjem na krakovima propelera, ili gubitke
zbog prenošenja rotacije na struju zraka itd. Zato ovakav idealni propeler ima koeficijent
učinkovitosti koji se definira kao omjer korisne snage i ukupno uložene snage:
2VTTV
TVP
TVi ∆η
+== .
ili
V2V1
1i ∆η
+= .
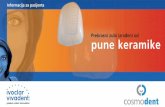
Na slici (8-5) prikazana je učinkovitost idealnog propelera kao funkcija omjera VV∆ ubrzanja
struje zraka i neporemećene brzine struje zraka. Koeficijent učinkovitosti je uvijek manji od 1,
odnosno 100%. Kako bi imali učinkovitost što veću (što bližu jedinici) potrebno je da V∆
povećanje brzine bude što manji. No za malu veličinu V∆ mala je i pogonska sila propelera
što čini kontradiktorni efekt.

10
Slika 5. Učinkovitost idealnog propelera kao funkcija omjera VV∆
8.2.7 Koeficijent opterećenja od pogonske sile
Koeficijent opterećenja od pogonske sile propelera definira se kao
A
2VTk 2T ρ
=
što je ekvivalent po definiciji aerodinamičkom koeficijentu sile uzgona. Koeficijent
opterećenja Tk i učinkovitost idealnog propelera iη su povezani. Ako pogonsku silu
zamijenimo s njenim izrazom
( )21
24 VVA
21T −= ρ .
dobivamo koeficijent opterećenja u ovisnosti od ulazne i izlazne brzine
12
1
4 −
=
VV
kT
i ako još iskoristimo veze između brzina VV1 = i VVV4 ∆+= koeficijent opterećenja bit će
222
T VV
VV21
VV11
VVVk
+=−
+=−
+
=∆∆∆∆
odakle je

11
1k1VV
T −+=∆
što zamjenom u definiciju koeficijenta učinkovitosti idealnog propelera daje:
VV
211
1i ∆η
+=
daje traženu vezu između koeficjenata opterećenja i učinkovitosti:
T
i k++=
112η .
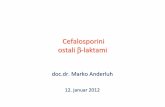
Slika 6. Učinkovitost idealnog propelera kao funkcija koeficijenta opterećenja od pogonske
sile
Iz gornjeg zapisa, te prikaza koeficijenta učinkovitosti kao funkcije od koeficijenta
opterećenja od pogonske sile (slika 8-6), može se zaključiti da bi 100% učinkovitost dobili
samo kada je kT = 0.
Ako bi promatrali dva propelera različitog promjera sa stanovišta koeficijenta
opterećenja od pogonske sile, za učinkovitost bi bio povoljni propeler većeg promjera (manje
Tk , veće iη ) . S druge strane postoje i ograničenja po pitanju D promjera propelera:
• strukturalno ograničenje – za male zrakoplove kritično je zadovoljavanje kriterija
minimalne udaljenosti propelera od terena, dok je za veće zrakoplove bitna
optimizacija težine (velika strukturalna opterećenja);

12
• aerodinamičko ograničenje – veći promjer propelera povećava brzinu na vrhu
propelera odnosno Machov broj a
DMatipΩ
=2/ za koji je poželjno da bude manji od
0.8, da bi se izbjegao značajan porast otpora u transonici, što bi smanjilo učinkovitost
propelera. Osim toga povećava se i buka od propelera.
Pored koeficijenta opterećenja od pogonske sile koristi se i definicija opterećenja diska (disk
loading)
ATDL = .
Uvođenjem ove veličine može se reći da je dinamički tlak u tragu dovoljno daleko od
propelera, jednak zbroju dinamičkog tlaka neporemećene struje i opterećenja diska.
8.2.8 Koeficijent pogonske sile i snage
Za propeler najčešća je primjena koeficijenata pogonske sile i snage koji se definiraju na
sljedeći način:
53P
42T
DnPC
DnTC
ρ
ρ
=
=.
Za tako definirane koeficijente pogonske sile i snage učinkovitost propelera bit će
nDV
CC
DnCVDnC
PTV
P
T53
P
42T ===ρρη
Odnos nDV nazvali smo koeficijent napredovanja ili korak napredovanja (advance ratio) i
označili smo ga sa J . S tim parametrom bit će konačno koeficijent učinkovitosti propelera:
JCC
P
T=η .
8.3 Osnove teorije elementarnog kraka propelera
Teorija diska ne obuhvata gubitke uslijed:
• rotacije zraka u njegovom tragu, o
• otpora profila kraka,
• radijalnog strujanja, i
• uslijed interferencije između krakova propelera.

13
Ovom teorijom jedino je obuhvaćen gubitak kinetičke energije. Zato za teoriju diska nije
potrebna nikakva informacija o samom kraku propelera. Uvođenje geometrije kraka u analizu
propelera inicirao je Froude 1878. godine kroz teoriju elementarnog kraka, a detaljno je
postavlja Drzewiecki.
Teorija elementarnog kraka razmatra sile u presjeku kraka propelera na udaljenosti r
od osi propelera, odnosno na bezdimenzionalnom radijusu Rrr = kao na slici 8-7.
Pretpostavlja se da je u tom presjeku strujanje ravansko, tj. da se može analizirati kao
aeroprofil u dvodimenzionalnom strujanju. Na takav profil (slika 8-8), optjecan brzinom VR ,
djeluje elementarna aerodinamička sila dFp na elementu duljine kraka dr. Ukupna sila na
kraku jednaka je sumi svih elementarnih sila na svim elementima duž kraka, tj. integralu po r
od glavčine do vrha kraka.
Slika 7. Elementarni presjek dr kraka propelera na radijusu r
Za pogonsku silu i tangencijalnu silu na elementu kraka dr (prema slici 8-10) doprinos je
φφφφ
cossinsincos⋅+⋅=⋅−⋅=
dDdLdFdDdLdT
z
.
Za moment propelera elementarni doprinos je
rdFdQ z ⋅=

14
Slika 8. Brzine i sile na elementarnom presjeku dr kraka propelera na radijusu r
Za elementarnu silu uzgona i nultog otpora vrijedi
.drccV
21dD
drccV21dL
0d2
R0
l2
R
⋅⋅⋅=
⋅⋅⋅=
ρ
ρ
Nakon uvrštavanja elementarnih sila uzgona i otpora u (24) elementarni doprinos pogonske
sile i momenta na propeleru su
.)cossin(
)sincos(
drrcccV21dQ
drcccV21dT
0dl2
R
0dl2
R
⋅⋅+⋅⋅⋅=
⋅⋅−⋅⋅⋅=
φφρ
φφρ
U ovim relacijama inducirana brzina je zanemarena što je opravdano kad je opravdano kad je
opterećenje propelera malo. U općem slučaju (slika 8-9) potrebno uzeti u obzir induciranu
brzinu. To činimo jednostavno ako zamijenimo kut φ sa kutom iαφψ += , a brzinu RVr
s
brzinom EVr
koja je zbroj brzine RVr
i inducirane brzine iVr
.
rdrcccV
21dQ
drcccV21dT
0dl2
E
0dl2
E
⋅⋅+⋅⋅⋅=
⋅⋅−⋅⋅⋅=
)cossin(
)sincos(
ψψρ
ψψρ.
Problem koji se nameće pri u primjeni ovih jednadžba je određivanje inducirane brzine Vi te
pripadajućeg induciranog napadnog kuta iα , odnosno kuta napredovanja ψ . Prva

15
aproksimacija je pretpostavka da je inducirani napadni kut mali te da je RE VV ≈ . Tada su
elementarna pogonska sila i elementarni okretni moment od N elementarni isječaka dr na N
krakova
Slika 9. Brzine i sile na presjeku kraka propelera sa induciranom brzinom
[ ]
[ ] .)cos()sin(
)sin()cos(
rdrccc2VNdQ
drccc2VNdT
i0dil
2R
i0dil
2R
⋅+⋅++⋅⋅⋅=
⋅+⋅−+⋅⋅⋅=
αφαφρ
αφαφρ
Za brzinu VR vrijedi
( ) 22R VrV += Ω
Kako je n2πΩ =
( ) 22R Vnr2V += π
( )2
2R nR2
VrnR2V
+= π
za brzinu VR dobiva se relacija
222R JrnR2V += π
Kad u jednadžbu za elementarnu pogonsku silu
[ ] drccc2VNdT i0dil
2R ⋅+⋅−+⋅⋅⋅= )sin()cos( αφαφρ
zamijenimo RV prema gornjoj jednadžbi i dijelimo 42Dnρ , dobivamo:

16
[ ]drccJr8Dn
dTdC i0dil222
42T )cos()sin()( αφαφπσπρ
+⋅++⋅⋅+==
gdje je RcN
πσ = omjer solidifikacije definiran kao omjer površine propelera (uz pretpostavku
konstantne tetive) i diska propelera. Nakon integracije ∫=1
hrTT dCC , dobiva se ukupni
koeficijent pogonske sile.
Slično je za elementarni koeficijenta snage propelera od N isječka debljine dr na N
krakova propelera:
[ ] rdccJrr8Dn
dPdC i0dil222
53P )cos()sin()( αφαφπσπρ
+⋅++⋅⋅+== .
Nakon integracije ∫=1
hrPP dCC dobiva se ukupni koeficijent pogonske snage. Kako bi
odredili koeficijent pogonske sile TC i snage PC potrebno je odrediti ovisnost induciranog
kuta ( )riα . Poznavanje induciranog kuta je potrebno za određivanje napadnog kuta u
promatranom presjeku:
iαφβα −−=
zato što od njega ovisi i vrijednost aerodinamičkog koeficijenata profila lc .
8.4 Primjena teorije vrtloga
Postoje analitičke metode koje određuju približno ( )i rα , ali danas se najviše koriste
numeričke metode. Jedna od tih numeričkih metoda je diskretizacija kraka propelera po
rasponu R. Krak podijelimo na m segmenta kao na slici 8-10, a zatim primjenjujemo VLM
kao u slučaju krila. Napadni kut u presjeku "r" bit će
( ) irα β φ α= − −
Kut φ je različit od presjeka do presjeka i ovisi o režimu rada
rVΩ
=φtan
a inducirani kut indα određujemo pomoću metode VLM.
Krak se dijeli na "m" segmenata. Ort normale na segment "k" ima komponente prema
slici 8.3
[ ]Tkkk 0 ββ sincos−=n

17
Na sredini "k" segmenta po razmahu i na 4k
kc h+ od vrha tetive, postavljamo kontrolnu točku
Ck čije su koordinate
kkk
kk
kkk
hzryhx
β
β
cos
sin
===
Svaki segment ima jedan pridruženi kΠ vrtlog, intenziteta kΓ . Centralni dio kΠ
vrtloga leži na 41 tetiva tog segmenta, a bočni kraci idu po tetivama do izlaznog ruba, a
zatim po strujnicama. Svaki krak propelera zbog simetrije ima isti set kΠ vrtloga.
r
R
hr
Slika 10
8.4.1 Trag iza propelera
Iza kraka propelera ostaje vrtložna plahta koju čine vrtložne niti na strujnicama. Kada smo
proučavali krilo pretpostavili smo da su strujnice iza krila u pravcu x osi (korijene tetive
krila). Nismo uzeli u obzir da vrtložne niti koje se nalaze na strujnicama mijenjaju oblik tih
strujnica. Zbog tog među utjecaja oblik vrtložne plahte koji je na početku bio ravanski sve

18
više i više se mijenjao u neku složenu površinu. Međutim, što su te promjene bile veće one su
bile sve dalje od krila pa je utjecaj tih promjena oblika vrtložne plahte bio neznatan na
aerodinamičke značajke krila. Tako isto i sad u slučaju propelera, zanemarit ćemo utjecaj
vrtložnih niti na oblik strujnica poslije silaska sa propelera. To znači da se niti koje započinju
na izlaznom rubu kraka propelera, protežu po putanjama točaka izlaznog ruba.
Na slici 8-11 prikazana su dva koordinatna sustava 000 zyx u početnom položaju
propelera i zyx koji je vezan za krak propelera, ide u naprijed i okreće se sa propelerom. U
trenutku t koordinatni sustav čini kut φ s koordinatnim sustavom u početnom položaju oko osi
x kao na slici 8-11
ϕx
y
z
0x
0y
r
0z
ϕ
r
y
z
Slika 11

19
Točka koja je u početnom trenutku napustila noseću liniju poslije vremena t imat će
koordinate za novi položaj koordinatnog sustava (koji se pomjerio za tV i zaokrenuo za kut
ϕ kao na slici 8-11)
ϕϕ
sincos
rzry
tVx
==
⋅=
Eliminacijom vremena iz jednadžba tVx = i tΩ=ϕ dobivamo
ϕ⋅Ω
=Vx .
Kad promatramo kao na slici 8-14 vrh kraka propelera (gledamo u vrh osi y ) onda je
RV
t Ω=φtan
pa sve točke u presjeku x vrtložne plahte imaju istu apscisu
ϕφϕϕ ⋅=⋅Ω
=⋅Ω
= tRRVRVx tan
Zato su parametarske jednadžbe putanje točke noseće linije na udaljenosti r od osi propelera:
ϕϕ
ϕφ
sincostan
rzryRx t
==
⋅=
Istu takvu spiralnu putanju ima i točka na izlaznom rubu kraka propelera, samo je njena
udaljenost od x osi veća
( )22 cos75.0 βcrr +=′
i ona ima već jedan polazni kut
rc βϕ cos75.0arctan0 =
pa su jednadžbe spiralne putanje točke izlaznog ruba
( )
ϕϕ
ϕϕφβ
sincos
tansin75.0 0
rzry
Rcx t
′=
′=−⋅+=
Usvajamo da vrtložna nit leži na toj spirali. Za različite vrijednosti r imamo različite vrtložne
niti ( Rrrh << ). Parametar r pokazuje o kojoj se vrtložnoj niti radi, a parametar ϕ koju
točku na toj vrtložnoj niti promatramo.

20
8.4.2 Inducirana brzina u kontrolnoj točki
Koordinatni sustav postavili smo na slici 8-14 Π vrtlog intenziteta jΓ segmenta "j"
inducira u kontrolnoj točki segmenta "k" brzinu koja je zbroj tri dijela: inducirana brzina od
centralnog dijela i inducirane brzine od dva kraka Π vrtloga.
U poglavlju 2.3.2 izveli smo na temelju Biot - Savartovom zakonu da je inducirana
brzina u točki C od srednjeg dijela П vrtloga
( ) 21212121
21
4rr
rrrrrrrrVAB
rrrr
r×
⋅++Γ
=π
i napravili smo rutinu ind.m koja računa induciranu brzinu u točki C od segmenta AB.
Ulazni parametri su koordinate točaka A, B i C.
x
z
RV
Vr
Ω
Rωφ
nr
C
h
β
Slika 12. Položaj brzine zraka RV u odnosu na profil propelera
Po istom obrascu možemo izračunati induciranu brzinu od dijelova AD i BE krakova П
vrtloga koji se nalaze na kraku propelera (slika 8-16). Inducirana brzina u kontrolnoj točki C
jednaka je zbroju induciranih brzina:

21
• od pravocrtnog dijela AB vrtloga
• od pravocrtnog dijela AD
• od pravocrtnog dijela BE,
• od vrtložne niti iz točke D i
• od vrtložne niti iz točke E
Inducirane brzine od vrtložnih niti računa rutina nit.m. On izračunava induciranu brzinu od
jedne vrtložne niti u tragu propelera. Ulazni parametar su koordinate točke na izlaznom rubu
kraka i koordinate kontrolne točke. U toj rutini izračunate su točke na svakih 010=∆ϕ , a
između tih točaka je pretpostavljeno da je vrtložna nit pravocrtna, te je na nju primijenjena
rutina za induciranu brzinu od pravocrtnog segmenta.
C
A By
z
0rr
D E
Slika 13
Inducirana brzina u točki C
• od vrtložne niti iz točke E ( ) Γ⋅CEK ,,K ,
• od vrtložne niti iz točke D ( ) Γ⋅− CDK ,,K
znak - zbog obrnutog smjera vrtloga duž niti iz točke D u odnosu na vrtlog na niti iz točke E.
Konačno ukupna inducirana brzina u kontrolnoj točki Ck od jΠ vrtloga

22
( ) ( ) ( ) ( ) ( ) ΓΓΓΓΓ∆ ⋅−⋅−⋅+⋅+⋅= 43421 K4342143421 K4342143421nitindnitindind rutinaCEK
rutinaCEBK
rutinaCDK
rutinaCDAK
rutinaCBAKV jk ,,,,,,,,,,
( ) ( ) ( ) ( ) ( )[ ] jjk CEKCEBKCDKCDAKCBAKV Γ⋅−−++=∆ ,,,,,,,,,, KK
jjkjk KV Γ∆ ⋅=
gdje je:
( ) ( ) ( ) ( ) ( ) ( )CEKCEBKCDKCDAKCBAKEDCBAK jk ,,,,,,,,,,,,,, KK −−++= .
Rutina vrtlog.m računa vektor jkK za zadane koordinate kontrolne točke Ck i zadani
segment "j" (poznate koordinate točaka: A, B, D i E)
S obzirom da mi promatramo samo slučaj kad je brzina leta u pravcu ose propelera, na
drugom i trećem kraku bit će isti sustav vrtloga Γ1, Γ2, ... , Γj, ... Γm kao na prvom kraku, ali
će koeficijenti jkK biti različiti. Koordinate kontrolne točke C su iste, a koordinate točaka A,
B, D i E se okreću za Nπ2 gdje N broj krakova propelera. Ako označimo koordinate točke
A' na prvom kraku sa
[ ]TAAA zyx ′′′
onda točka A" na drugom kraku ima koordinate:
′′′
⋅
=
′′′′′′
A
A
A
x
A
A
A
zyx
Nzyx
π2L
i isto tako za koordinate B", D" i E". Pri tome
Nxπ2L je matrica transformacije za rotaciju
oko osi x za kut
Nπ2 . Koordinate točaka na trećem kraku nalazimo kad koordinate s drugog
kraka još jednom okrenemo za Nπ2 . Tako konačno dobivamo induciranu brzinu u
kontrolnoj točki Ck od tri П vrtloga koji imaju intenzitet jΓ na tri kraka simetrično
raspoređena
( ) ( ) ( )[ ] j
kj
jjkjjjjkjjjjkjjjk
K
EDCBAKEDCBAKEDCBAKV Γ⋅′′′′′′′′′′′′+′′′′′′′′+′′′′=4444444444444 34444444444444 21 v
r,,,,,,,,,,,,
k jk j jV K= ⋅Γuurw

23
i konačno kad zbrojimo u kontrolnoj točki Ck inducirane brzine od svih vrtloga dobivamo
ukupnu induciranu brzinu u kontrolnoj točki
1
j m
k jk jj
V K=
=
= ⋅Γ∑uurw
8.4.3 Zadovoljenje rubnih uvjeta
U kontrolnoj točki kC brzina optjecanja bit će zbroj brzine iz beskonačnosti i inducirane
brzine indR VVsr
+ , a komponenta te brzine koja je okomita na ravan segmenta kontrolne točke
mora ispunjavati rubni uvjet
( ) 0=⋅+ kindR nVV rrr
Kako je
∑=
=
⋅=mj
jJjkkind KV
1
Γw
mora biti
01
=⋅+⋅ ∑=
m
jjjkkkR KnnV Γrrr
ili
( ) Rk
m
jjkjk VnKn
rrr⋅−=⋅∑
=1
Γ
Ako uvedemo matrice
Komponente orta normale su [ ]Tkkk 0 ββ sincos−=n , a rezultujuće brzine
[ ]rV ⋅= Ω0RV pa je skalarni produkt na desnoj strani
kk rV βΩβ sincos +−
Uvedimo matrice
kkk
kjkkj
rVEKnA
βΩβ sincos +−=
⋅=r
Tako dobivamo jednadžbe
k
m
ijkj EA =∑
=1
Γ
S obzirom da imamo m kontrolnih točaka (na svakom segmentu po jednu) imat ćemo i m
ovakvih jednadžba sa m nepoznatih Π vrtloga mΓΓΓ ,,, 21 K .

24
8.4.4 Inducirana brzina na nosećoj liniji
Kad smo odredili svih m vrtloga možemo izračunati induciranu brzinu na 41 tetive segmenta
"i"
0
0
===
c
c
c
zry
x
od svih m Π vrtloga (računajući i sve krakove). Postupak je isti kao kad smo računali
induciranu brzinu u kontrolnoj točki. Neka je to vektor indVr
. koji ima komponente ( )xindV i
( )zindV u pravcu osi x i z. Brzina optjecanja profila u presjeku jest
indRE VVVsrr
+=
gdje je kao što znamo rVVRrvrr
×Ω+= . Napadni kut profila bit će
ψβα −=
gdje je ψ kut koji čini brzina optjecanja EVr
s diskom propelera .
( )( )zind
xind
VrVV
+Ω+
=ψtan
V
EV
RV
indVxindV
zindV
x
zr
Slika 14
Inducirana brzina na sredini segmenta AB noseće linije od Π vrtloga ABDE bit će:

25
( ) ( ) ( ) ( ) jjjjjk
rutinaSEK
rutinaSEBK
rutinaSDK
rutinaSDAKV Γ⋅−Γ⋅−Γ⋅+Γ⋅=∆ 43421 K4342143421 K43421
nitindnitind,,,,,,,,
gdje je S točka na sredni potega AB "k"-og segmenta. Dio AB od bilo kog vrtloga "j" ne
inducira brzinu jer točka S leži na tom pravcu (pravac noseće linije). Zato je napravljena
rutina kraci.m koja poziva rutine ind.m i nit.m te izračunava traženu induciranu brzinu
samo za krake od "j"-og Π vrtloga. Zbrajanjem tih induciranih brzina za sve vrtloge (od
1=j do mj = ) dobivamo konačno induciranu brzinu
8.5 Primjer Jedan vrlo jednostavan oblik dvokrakog propelera je "Purdue" propeler na slici 8-15.
yΩ
z
C
1A 1B
1D 1E
2A2B
2E 2D
Slika 15. Pogled spreda u propelera "Purdue"
On ima konstantnu tetivu, nema strijelu a ima simetričan profil NACA 0010.
crcRc h 5.030508.0 ===
Kut uvijanja 4320 r*)(1271.8/16-r*(1351.5/8)+r*(338.8/4)-r*(105.1/2)-86.3=β
Režim rada je
sokrNsmV 4.5735 ==
U direktoriju programi\Propeler nalazi se program Elisa2.m u MATLABu. On računa u
prvom dijelu ( )rΓ , zatim u drugom dijelu induciranu brzinu ( )rVind
r a na temelju inducirane
brzine određuje se kut ψ . Konačno u trećem dijelu s tim kutom izračunava se TC i PC .
Program koristi rutinu vrtlog.m za izračun inducirane brzine u kontrolnoj točki C, od

26
jediničnog П vrtloga jednog kraka i od istog П vrtloga drugog kraka. Za izračun inducirane
brzine u točki na nosećoj liniji program koristi rutinu kraci.m koja je ustvari ista kao i rutina
vrtlog.m samo ne računa induciranu brzinu od centralnog dijela jer je ona nula. Rutine
vrtlog.m i kraci.m , a one za izračunavanje inducirane brzine od pravocrtnih dijelova П
vrtloga koriste rutinu ind.m, a za izračunavanje induciranih brzini od vrtložne niti u tragu
propelera koriste rutinu nit.m. S tim programom Propeler.m dobiveni su dijagrami na
slikama 8-16, 8-17 i 8-18.
Slika 16

27
Slika 17
Slika 18

28