eclass.teipir.greclass.teipir.gr/openeclass/modules/document/file.php/AUTO115/II... · Web...
18
Ορολογία στην Ξένη Γλώσσα Ενότητα: Control Systems Παναγιώτης Τσατσαρός Τμήμα Μηχ. Αυτοματισμού ΤΕ ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑ Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά
Transcript of eclass.teipir.greclass.teipir.gr/openeclass/modules/document/file.php/AUTO115/II... · Web...
Ορολογία στην Ξένη ΓλώσσαΕνότητα: Control Systems
Παναγιώτης Τσατσαρός
Τμήμα Μηχ. Αυτοματισμού ΤΕ
ΕΛΛΗΝΙΚΗ ΔΗΜΟΚΡΑΤΙΑΑνώτατο Εκπαιδευτικό Ίδρυμα ΠειραιάΤεχνολογικού Τομέα
Άδειες Χρήσης
• Το παρόν εκπαιδευτικό υλικό υπόκειται σε άδειες χρήσης Creative Commons.
• Για εκπαιδευτικό υλικό, όπως εικόνες, που υπόκειται σε άλλου τύπου άδειας χρήσης, η άδεια χρήσης αναφέρεται ρητώς.
Χρηματοδότηση
• Το παρόν εκπαιδευτικό υλικό έχει αναπτυχθεί στα πλαίσια του εκπαιδευτικού έργου του διδάσκοντα.
• Το έργο «Ανοικτά Ακαδημαϊκά Μαθήματα στο Ανώτατο Εκπαιδευτικό Ίδρυμα Πειραιά Τεχνολογικού Τομέα» έχει χρηματοδοτήσει μόνο την αναδιαμόρφωση του εκπαιδευτικού υλικού.
• Το έργο υλοποιείται στο πλαίσιο του Επιχειρησιακού Προγράμματος «Εκπαίδευση και Δια Βίου Μάθηση» και συγχρηματοδοτείται από την Ευρωπαϊκή Ένωση (Ευρωπαϊκό Κοινωνικό Ταμείο) και από εθνικούς πόρους.
2
1. Σκοποί ενότητας...................................................................................................4
2. Περιεχόμενα ενότητας..........................................................................................4
3. Control Systems...................................................................................................5
3.1 Regulators and Servomechanisms................................................................6
4. Practice and Exercise...........................................................................................7
4.1 Exercise A: Open Questions..........................................................................7
4.2 Exercise B: Question forming........................................................................9
4.3 Exercise C: Matching terms and definitions...................................................9
4.4 Exercise D: Filling in Paragraph information................................................10
4.5 Exercise E: distinguishing between similar meanings.................................10
4.5.1 Exercise E1...........................................................................................10
4.5.2 Exercise E2...........................................................................................11
4.6 Exercise F: preposition practice...................................................................12
4.7 Exercise G: Filling in paragraph information................................................12
3
1. Σκοποί ενότητας
Provide authentic text and vocabulary specific to the needs of students of Automation Engineering
Encourage students to combine their knowledge of English with their technical knowledge
Help students understand complex principles Encourage students to differentiate between similar meanings Help students to match terms and their definitions Guide students into locating specific information relative to specific
components of a system
2. Περιεχόμενα ενότητας
Open loop vs closed loop systems Components of closed loop systems Transfer function, transient change, damping Regulators compared to servomechanisms Dc stepper motors and operation principle
4
3. Control Systems
A control system is one which undertakes some function, checks its success and takes further action until the objective is attained. And if in the meantime the objective varies then the system will respond to the change. Control systems depend on the quantities which we can measure. These quantities basically include displacement, force, pressure, temperature, and velocity.
Control systems can be classified as open-loop systems or closed loop systems. Open-loop systems take no recognition of the output in the belief that the input will be achieved. In other words, they have no feedback to tell the control that the action has succeeded or failed. On the contrary, closed- loop systems do have feedback arrangements to ensure that the input intention is achieved and are almost always automatic, i.e. there is no human intervention.
Two important functions are therefore necessary for a closed-loop system to exist: feedback from the output to the input and a difference between the feedback and the desired outcome specified by the input control signal. This difference is called error or deviation and the device which converts a quantity measurement such as force into an electrical feedback signal is called a transducer, the simplest one being a potentiometer. A basic control system has four significant features: the input signal, sometimes called the reference or set signal, which sets the condition that the control system is intended to achieve; the output signal, which represents a measurement of the outcome achieved thus providing the feedback signal; the comparator in which the input and output signals arc compared, the difference or error being then fed to the controller; the controller is the device which causes a motor to cause the desired output .movement controlling the supply of energy from a separate power supply.
It follows that many control systems need to operate on the error, but also do on the rate of reaction which is necessary. However, this introduces a further complication. If the feedback circuit detects a change of error, it may be that it will not properly reflect this because it does not respond directly. We can describe this indirect response in terms of the transfer function. The transfer function is the ratio of the output signal to the input signal making due allowance for the time clement. A change of the input signal gives rise to a period of transient change before a new steady-state condition can be established. This is done generally when the error or deviation is not zero but it is insufficient to cause any further change. A transient condition arises when the system is switched on and the speed may then fluctuate several times prior to the desired speed being reached and a steady-state condition being achieved. Another transient condition occurs if there is a change in condition after the steady-state condition has been established if, for example, the torque of the load were to change, which would give rise to a transient variation in speed for a short period of time. To reduce the transient period, damping is introduced. Damping is in fact a second form of feedback depending on the velocity of approach of the load position to the required objective. If the objective is passed, there is overshoot.
5
To eliminate overshoot, sufficient velocity feedback must be provided. This is known as critical damping. If there were a slight reduction in velocity feedback, overshoot would occur: such a system is said to be underdamped. On the contrary, if there were an increase in velocity feedback, no overshoot would occur but the transient time would be even longer and the system would be overdamped . Care has to be taken when introducing velocity damping - if too much were introduced, a system could become unstable, i.e. instead of approaching a steady-state condition, the overshooting would exceed the initial error and progressively the errors would become larger and larger as the load swung backwards and forwards.
3.1 Regulators and Servomechanisms
Automatic control systems can be divided into regulators and servomechanisms or remote position controllers (r.p.c.s). Typically, regulators control speed and are associated with continuing rotation whereas r.p.c.s control position and require point-to-point movement. The difference between the two types is the form in which the error appears. For steady-state conditions, regulators require an error signal whereas r.p.c.s require zero signal. In either case, the mechanism will have an inertia to overcome when motion is required. This infers that the mass of the mechanism has to be accelerated to generate movement, which will be probably followed by deceleration so that the mechanism stops at the required position. This is especially the case in servomechanisms but regulators also have to respond to the demand for movement. And if there is to be movement, we have to introduce a motor, referred to as the load, into the system to drive the mechanism.
In regulators, the control of the speed of the motor must be exercised with a high degree of accuracy. The motor which has a good torque/speed characteristic for such applications is the dc shunt motor which has been described in previous chapters. The field winding of such a motor is excited from the same source as the armature winding, hence its name. However, separately excited motors can be constructed, i.e. motors in which the field winding is excited from a completely separate source as is the case in control systems where the output of the control amplifier can be arranged to be the source of excitation for the field winding of the motor. Due to the fact that a dc shunt motor needs time for maintenance and repair, more robust alternatives have been sought for application in control systems, one of which is the cage rotor induction motor. As it can easily be remembered the speed of this ac motor is effectively set by the supply frequency. If wc could vary the supply frequency, it follows that we would control the speed. Power electronic devices such as thyristors have become available for this purpose. If these devices are controlled by the control system amplifier then a robust motor capable of having its speed controlled has been implemented.
A servomechanism employs rotary motion to control the angular position of a shaft that is used to position the shaft of a second device. In other words, rotary motion is transmitted from one location to another fc without any direct mechanical linkage. Servosystems that include servomechanisms generally require amplifiers and error-detecting devices to control the angular displacement of a shaft. They are typically used for changing the mechanical position of a device. Mechanical position
6
applications include numerical-control machinery and process-control- indicating equipment in industry. As a general rule, a servosystem is a rather complex unit that follows the commands of a closed-loop control path. The input of a servosystem serves as the reference source or as a set point to which the load element responds. When the input is changed in some way, a command is applied to the error detector. This device receives data from both the input source and the controlled output device. If a correction is needed, with reference to the input command, it is amplified and applied to the actuator. The actuator is normally a servomotor that produces controlled shaft displacements. The controlled output device is usually a system that relays information back to the error detector for position comparison. A servomotor is ordinarily a special type of ac or dc motor that drives a precision piece of equipment in specific increments. Compared to other electric motors, it is unique in the sense that it is used to achieve a precise degree of rotary motion. Distinct types of servomotors include the Geneva cam, used in systems which require very large torques, and the ac synchronous motor whose use is limited to low-power applications. These types have been largely superseded, though, by the dc stepper or stepping motor.
Dc stepper motors are used primarily to change electrical pulses into a rotary motion that can be used to produce mechanical movements. The shaft of a dc stepper motor rotates a specific number of mechanical degrees with each incoming pulse of electrical energy. The amount of rotary movement or angular displacement produced by each pulse can be repeated precisely with each succeeding pulse from the drive source. The resulting output of this device is used to accurately locate or position automatic process machinery. The velocity, distance, and direction of movement of a specific machine can be controlled by a dc stepper motor which is energized by a dc drive amplifier controlled by a digital logic circuit. This drive-amplifier circuitry is a key factor in the overall performance of this motor. A very important principle that applies to the operation of a dc stepper motor is that like magnetic poles repel and unlike magnetic poles attract. If the rotor of such a motor, which is of the permanent-magnet type of construction, is placed between two series-connected stator coils while power is applied to the stator, the rotor can then be repelled in either direction. The direction of rotation in this case is unpredictable. Adding two more stator coils to a simple motor will make the direction of rotation predictable. With the stator polarities indicated, the rotor will align itself midway between the two pairs of stator coils. The direction of rotation can now be predicted, and is determined by the polarities of the stator-coil sets. Adding more stator-coil pairs to a motor of this type improves its rotation and makes the stepping action very accurate.
4. Practice and Exercise
4.1 Exercise A: Open Questions Answer the following questions about the reading text.
1. What is a basic difference between an open-loop control system and a closed-loop control system?
2. What functions are indispensable for the existence of a closed-loop system?
7
3. Which component of a control system operates so that the desired output movement is achieved?
4. How can a change of error be determined if it is not indicated by the feedback circuit?
5. In what circumstances does a transient condition occur?6. Docs 'overshooting' correspond to 'overdamping'?7. What happens if excessive velocity damping is introduced in the control system?8. Briefly, what are the differences and similarities between a regulator and a
servomechanism?9. How can separate excitation of a motor be achieved in a regulator control
system?10. What do we mean by saying that rotary motion is transmitted from one location to
another 'without any direct mcchanical linkage'?11. Numerical-control machinery and process-control-indicating equipment are
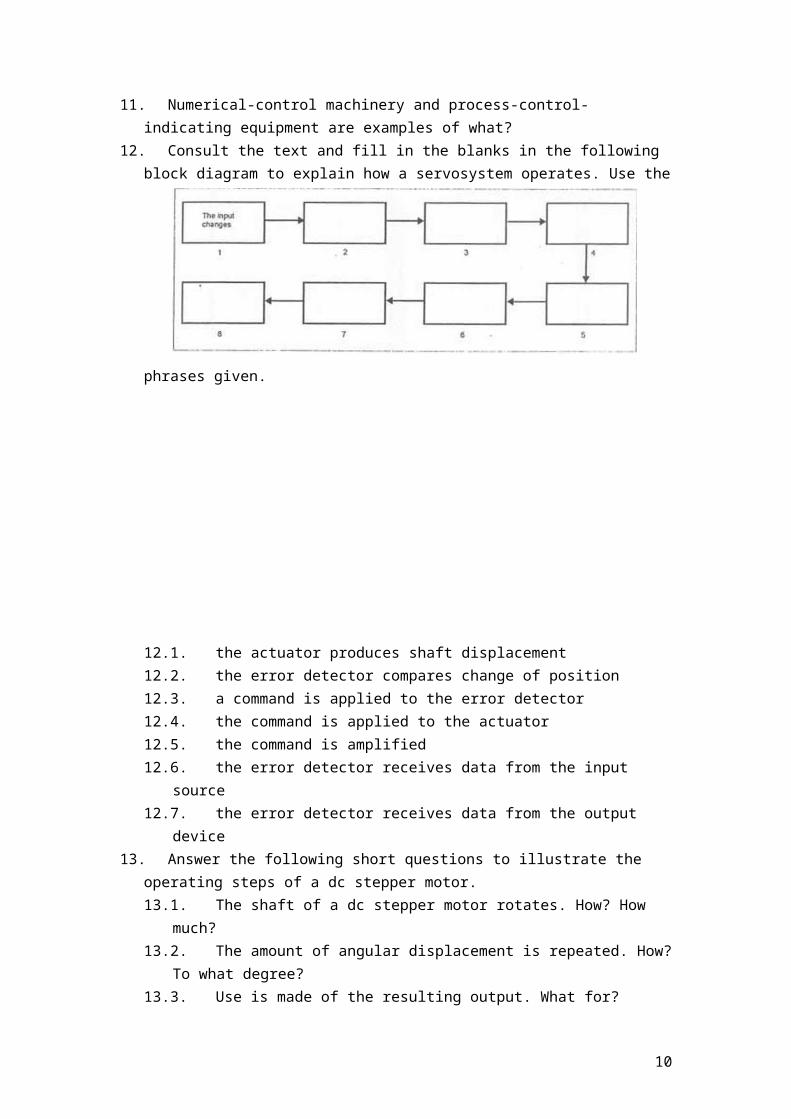
examples of what?12. Consult the text and fill in the blanks in the following block diagram to explain how
a servosystem operates. Use the phrases given.
12.1. the actuator produces shaft displacement12.2. the error detector compares change of position12.3. a command is applied to the error detector12.4. the command is applied to the actuator12.5. the command is amplified12.6. the error detector receives data from the input source12.7. the error detector receives data from the output device
13. Answer the following short questions to illustrate the operating steps of a dc stepper motor.13.1. The shaft of a dc stepper motor rotates. How? How much?13.2. The amount of angular displacement is repeated. How? To what
degree?13.3. Use is made of the resulting output. What for?
14. Is the electrostatic or the magnetic principle that applies to the •operation of a dc stepper motor?
15. How can the direction of rotation of a dc stepper motor be predicted? How can it be determined?
8
4.2 Exercise B: Question forming
Refer to the text and write questions to which the following statements are answers.
1. The quantities which we can measure.2. To ensure that the input intention is achieved.3. By the input control signal.4. It is called error or deviation.5. By means of a transducer.6. The input signal, the output signal, the comparator, and the controller.7. On the error and on the rate of reaction.8. When the error or deviation is not zero but it is insufficient to cause any further
change.9. By providing sufficient velocity feedback.10. Regulators and servomechanisms.11. By having the mechanism of each accelerated.12. The dc shunt motor.13. Power electronic devices such as thyristors.14. By means of amplifiers and error detecting devices.15. To the input of a servosystem which serves as the reference source.16. From both the input source and the controlled output device.17. In specific increments.18. Instead of a Geneva cam or a synchronous motor.19. A dc drive amplifier.20. It improves the rotation of the stepper motor and makes the stepping action very
accurate.
4.3 Exercise C: Matching terms and definitions
Find the terms in the text which match the following definitions.1. The introduction of velocity feedback that stabilizes a control system so that the
problem of overshoot is minimized or eliminated.2. A system that is controlled directly, and only, by an input signal, without the
benefit of feedback.3. A device which produces the feedback signal in a control system.4. A control system which changes the output quickly to a new value but in the
process it overshoots the desired output.5. The actual response obtained from a control system.6. A system which operates a mechanical load that is remote from its source of
control.7. Information in a closed-loop control system about the condition of a process
variable.8. An idealized situation that acts as the dividing line between over and under
damping. It may or may not overshoot the final value, but there is no oscillation.
9
9. Inertia causes the load to accelerate beyond the desired position.10. A system of integrated elements whose function is to maintain a process variable
at a desired value or within a desired range of values.11. The difference between the feedback signal and the input signal both under
steady-state conditions and during the transient period.12. The stimulus applied to a control system from an external source to produce a
specified response from the control system.13. A system whose output sluggishly approaches its final value without causing
overshooting.14. A system in which control action is totally dependent upon the output.
4.4 Exercise D: Filling in Paragraph information
The following text describes how stepper motors operate. Put the information that has been omitted back into the right place by selecting the appropriate item each time.
to make the motor shaft turn to align with the next one around a central metal gear from the next electromagnet to their terminals to the electromagnet's teeth
Stepper motors operate much differently from normal dc motors, which simply spin when voltage is applied (1) _________________ Stepper motors, on the other hand, effectively have multiple "toothed" electromagnets arranged (2) _________________ (3) _________________ first one electromagnet is given power, which makes the gear's teeth magnetically attracted (4) _________________ When the gear's teeth arc thus aligned to the first electromagnet, they are slightly offset (5) _________________ So when the next electromagnet is turned on and the first is turned off, the gear rotates slightly (6) _________________ and from there the process is repeated. Each of those slight rotations is called a "step". In that way, the motor can be turned a precise angle.
4.5 Exercise E: distinguishing between similar meanings
4.5.1 Exercise E1
The statements below have been taken from the reading text. Decide which of the two alternatives given in parentheses could replace the underlined word in the particular context.
1. Control systems depend on the quantities which we can measure (amounts / variables).
10

2. Open-loop systems take no recognition of the output in the belief that the input will be achieved (cannot recognize / cannot consider).
3. Open-loop systems take no recognition of the output in the belief that the input will be achieved (expecting / believing).
4. ... a difference between the feedback and the desired outcome specified by the input control signal (output / result).
5. ... the input signal, ..., which sets the condition that the control system is intended to achieve ... (requirement / state).
6. If the feedback circuit detects a change of error, it may be that it will not properly reflect this because it does not respond directly (mirror / indicate).
7. The transfer function is the ratio of the output signal to the input signal making due allowance for the time element (proper/expected).
8. A change of the input signal gives rise to a period of transient change before a new steady-state condition can be established (rises / causes).
9. This infers that the mass of the mechanism has to be accelerated to generate movement... (refers / means).
10. In regulators, the control of the speed of the motor must be exercised with a high degree of accuracy (forced / executed).
11. ... then a robust motor capable of having its speed controlled has been implemented (carried out / developed).
12. A servomechanism employs a rotary motion to control the angular position of a shaft... (makes use of / works for).
13. ..... a special type of ac or dc motor that drives a precision piece of equipment in specific increments (increases / quantities).
14. . 14. These types have been largely superseded, though, by the dc stepper motor (overcome / replaced).
15. The amount of rotary movement ... can be repeated precisely with each succeeding pulse from the drive source (successful / subsequent).
4.5.2 Exercise E2
Look back in the reading text and find words or phrases that have a similar meaning to:
1. takes on, enters into2. aim, goal3. meanwhile4. conversely, in contrast5. interference6. divergence, deflection7. as regards, in relation to 8. taking into consideration 9. vary, rise and fall10. gradually, increasingly11. swayed, oscillated12. slowing down13. searched, looked for14. strengthened
11
15. receives and passes on
4.6 Exercise F: preposition practice
Fill in the missing prepositions in the passage below.
Control systems arc broadly classified ___________ either closed-loop or open-loop. Closed-loop control systems are the type most commonly used because they respond ___________move the loads they are controlling more quickly and ___________ greater accuracy than open-loop systems. The reason___________ quicker response and greater accuracy is that an automatic feedback system informs the input that the desired movement has taken place. ___________ receipt of this feedback information, the system stops the motor, and motion of the load ceases until another movement is ordered___________ the input. This is similar ___________ the system that controls heat ___________ many homes. The thermostat (input) calls___________ heat. The furnace (output) produces heat and distributes it. Some of the heat is fed ___________ the thermostat. When this feedback raises the temperature of the room___________ that of the thermostat setting, the thermostat responds ___________ shutting the system down until heat is again required. ___________such a system, the feedback path ___________ input ___________ output and ___________ input, forms what is called a "closed loop." Because closed-loop control systems are automatic ___________ nature, they are further classified___________ the function they serve, e.g., controlling the position, the velocity, or the acceleration of the load being driven.
An open-loop control system is controlled directly, and only ___________ an input signal, ___________ the benefit of feedback. The basic units of this system are an __________amplifier and a motor. The amplifier receives a low-level input signal and amplifies it enough ___________ drive the motor ___________ perform the desired job. This system, the input is a signal that is fed ___________ the amplifier. The output of the amplifier is proportional ___________ the amplitude of the input signal. The phase (ac system) and polarity (dc system) of the input signal determines the direction that the motor shaft will turn. After amplification, the input signal is fed ___________ the motor, which moves the output shaft (load) ___________ the direction that corresponds ___________ the input signal. The motor will not stop driving the output shaft until the input signal is reduced ___________ zero or removed. This system usually requires an operator who controls speed and direction ___________ movement of the output ___________ varying the input. The operator could be controlling the input ___________ either a mechanical or an electrical linkage.
4.7 Exercise G: Filling in paragraph information
The following words have been taken out from the text below about the theory of operation of a dc stepper motor. Put them back in the right place.
12
burden pinsdrivers microste/isdetent specificationsstepless bipolarmodulation center-tappedviewed multipliesemitter ratedlimiter denominatorA stepper motor can be ___________ as a dc motor with the number of poles (on both rotor and stator) increased, taking care that they have no common ___________ Additionally, soft magnetic material with many teeth on the rotor and stator cheaply ___________ he number of poles. Like an ac synchronous motor, it is ideally driven bv sinusoidal current, allowing a ___________operation, but this puts some ___________ on the controller.
When using an 8-bit digital controller, ___________ per step are possible. As a digital-to-analog converter produces unwanted ohmic heat in the controller, pulse-width ___________is used instead to regulate the mean current. Simpler models switch voltage only for doing a step, thus needing an extra current ___________: for every step, they switch a single cable to the motor. ___________ controllers can switch between supply voltage, ground, and unconnected. Unipolar controllers can only connect or disconnect a cable, because the voltage is already hard wired. Unipolar controllers need ___________windings. It is possible to drive unipolar stepper motors with bipolar ___________The idea is to connect the output ___________ of the driver to 4 transistors. The transistor must be grounded at the ___________ and the driver must be connected to the base. Collector is connected to the coil wire of the motor. Stepper motors are ___________by the torque they produce. Synchronous electric motors using soft magnetic materials (having a core) have the ability to provide position holding torque, called ___________ torque, which issometimes included in the ___________.
13