






γλώσσες
Σελίδες
Νομικός


Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 464. Un problema di cinematica rigida sulle eliche cilindricheRispetto ad un riferimento Oe1e2e3 un punto P si muove di moto uniforme lungo un’elicacilindrica E di equazione parametrica:
P (!) ! O = r cos ! e1 + r sin! e2 +h
2"! e3 , ! " R ,
in cui r e h sono rispettivamente il raggio ed il passo dell’elica. Un secondo punto Q simuove a distanza costante da P — per cui il sistema dei due punti risulta rigido. La velocitaangolare istantanea del sistema P ! Q si assume proporzionale alla velocita istantanea diP , secondo un coe!ciente scalare # indipendente dal tempo. Si chiede di determinare:
(a) l’ascissa curvilinea, i versori tangente, normale e binormale, la curvatura e la torsionedella traiettoria di P ;
(b) la parametrizzazione della traiettoria di Q in termini della relativa ascissa curvilinea.
Soluzione(a) Ascissa curvilinea, triedro di Frenet, curvatura e torsione dell’elica cilindricaAscissa curvilineaPer calcolare l’ascissa curvilinea occorre determinare la derivata prima della parametriz-zazione della traiettoria di P :
dP
d!= !r sin ! e1 + r cos ! e2 +
h
2"e3
che per definizione e legata all’ascissa curvilinea dalla relazione di"erenziale
ds =!!!!dP
d!
!!!! d! =
"r2 +
h2
4"2d! = k d!
nella quale si e posto per brevita
k =
"r2 +
h2
4"2.
L’ascissa curvilinea risulta percio proporzionale, come e lecito attendersi, alla variabileangolare !:
s = k!
a meno di una costante additiva arbitraria che si porra uguale a zero per semplicita — esenza perdita di generalita.
Triedro di FrenetIl triedro di Frenet in un punto assegnato della curva e specificato completamente dai treversori tangente, normale e binormale alla curva E nello stesso punto. Il versore tangentee definito da:
$ =dP
d!
#!!!!dP
d!
!!!! =1k
$!r sin ! e1 + r cos ! e2 +
h
2"e3
%. (464.1)
Stefano Siboni 2408

Universita degli studi di Trento Esercizi di Meccanica razionale
La derivata di $ rispetto all’ascissa curvilinea si puo esprimere indirettamente nella forma:d$
ds=
d$
d!
& ds
d!=
1k2
(!r cos ! e1 ! r sin! e2) =r
k2(! cos ! e1 ! sin! e2)
dalla quale si deducono il versore normale
n =d$
ds
#!!!!d$
ds
!!!! = ! cos ! e1 ! sin! e2 (464.2)
e la curvatura dell’elica1%
=r
k2(464.3)
nel generico punto considerato. Per il versore binormale si ha infine l’espressione:
b = $#n =1k
!!!!!!
e1 e2 e3
!r sin ! r cos ! h/2"
! cos ! ! sin ! 0
!!!!!!=
1k
$ h
2"sin ! e1!
h
2"cos ! e2+r e3
%. (464.4)
In conclusione, il triedro di Frenet e individuato dai versori ortonormali:'((((()
(((((*
$ =1k
$!r sin ! e1 + r cos ! e2 +
h
2"e3
%
n = ! cos ! e1 ! sin ! e2
b =1k
$ h
2"sin! e1 !
h
2"cos ! e2 + r e3
%.
(464.5)
CurvaturaLa curvatura dell’elica e determinata dall’equazione (464.3):
1%
=r
k2= r
+r2 +
h2
4"2
,!1
(464.6)
ed assume quindi un valore costante, indipendente dalla scelta del punto lungo la curva.
TorsioneLa torsione 1/& e definita dall’equazione di Frenet-Serret:
db
ds= ! 1
&n .
Nella fattispecie si ha, ricordando la (464.4),
db
ds=
db
d!
& ds
d!=
1k
db
d!=
1k2
$ h
2"cos ! e1 +
h
2"sin! e2
%=
= ! h
2"
1k2
$! cos ! e1 ! sin! e2
%= ! h
2"
1k2
n
in modo che la torsione risulta1&
=h
2"
1k2
(464.7)
ed assume, al pari della curvatura, un valore costante lungo l’elica E.
Stefano Siboni 2409

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Traiettoria del punto QLa velocita del punto Q e legata a quella del punto P sull’elica dalla formula di Poissondell’atto di moto rigido
Q ! P = #P # (Q ! P )
in cui la velocita angolare e per ipotesi proporzionale alla velocita di P secondo un fattorescalare costante #. La stessa relazione puo esprimersi nella forma
d
dt(Q ! P ) = #P # (Q ! P ) , (464.8)
che fornisce l’evoluzione nel tempo del vettore posizione Q ! P noto che sia il moto di P .Conviene proiettare il vettore Q ! P lungo i versori ortonormali del triedro di Frenet escrivere
Q ! P = ' $ + ( n + ) b (464.9)
dove i coe!cienti scalari ', ( e ) sono funzioni del tempo da determinare. Posto s = s(t)e ricordando le formule di Frenet-Serret, il primo membro della (464.8) diventa
d
dt(Q ! P ) = '$ + (n + )b +
$'
d$
ds+ (
dn
ds+ )
db
ds
%s =
= '$ + (n + )b +-'
1%n + (
$!1
%$ +
1&
b%! )
1&
b
.s =
=+
' ! s
%(
,$ +
+( +
s
%' ! s
&)
,n +
+) +
s
&(
,b
mentre per il secondo membro della stessa equazione vale
#P # (Q ! P ) = #s $ # (' $ + ( n + ) b) = #s (( b ! ) n) .
Eguagliando il primo ed il secondo membro si ottiene cosı il sistema di equazioni di"erenzialilineari del primo ordine omogeneo e a coe!cienti costanti:
'(((((()
((((((*
' ! s
%( = 0
( +s
%' ! s
&) = !#s)
) +s
&( = #s(
ossia '((((()
(((((*
' =s
%(
( = ! s
%' + s
$ 1&! #
%)
) = !s$ 1
&! #
%( .
Stefano Siboni 2410

Universita degli studi di Trento Esercizi di Meccanica razionale
La forma matriciale dell’equazione ottenuta e la seguente:
d
dt
/
0001
'
(
)
2
3334 = s
/
00001
01%
0
!1%
01&! #
0 ! 1&
+ # 0
2
33334
/
0001
'
(
)
2
3334
che riguardando le variabili ',(, ) come funzioni dell’ascissa curvilinea s si riduce ad unaequazione per la sola traiettoria:
d
ds
/
0001
'
(
)
2
3334 =
/
00001
01%
0
!1%
01&! #
0 ! 1&
+ # 0
2
33334
/
0001
'
(
)
2
3334
quale che sia la legge oraria s(t) del moto di P sull’elica E. Posto per brevita
a =1%
b =1&! # e # =
/
10 a 0!a 0 b0 !b 0
2
4 ,
l’esponenziale della matrice s# si calcola facilmente nella forma:
exp(s#) =
/
0000001
b2 + a2 cos($
a2 + b2s)a2 + b2
a sin($
a2 + b2s)$a2 + b2
ab1 ! cos(
$a2 + b2s)
a2 + b2
!a sin($
a2 + b2s)$a2 + b2
cos($
a2 + b2s)b sin(
$a2 + b2s)$
a2 + b2
!ab1 ! cos(
$a2 + b2s)
a2 + b2!b sin(
$a2 + b2s)$
a2 + b2
a2 + b2 cos($
a2 + b2s)a2 + b2
2
3333334
in modo che risulta /
1'(s)((s))(s)
2
4 = exp(s#)
/
1'(0)((0))(0)
2
4
e quindi:
'(s) =b2 + a2 cos(
$a2 + b2s)
a2 + b2'(0) +
a sin($
a2 + b2s)$a2 + b2
((0) + ab1 ! cos(
$a2 + b2s)
a2 + b2)(0)
((s) = !a sin($
a2 + b2s)$a2 + b2
'(0) + cos(5
a2 + b2s)((0) +b sin(
$a2 + b2s)$
a2 + b2)(0)
)(s) = abcos(
$a2 + b2s) ! 1a2 + b2
'(0) ! b sin($
a2 + b2s)$a2 + b2
((0) +a2 + b2 cos(
$a2 + b2s)
a2 + b2)(0)
Stefano Siboni 2411

Universita degli studi di Trento Esercizi di Meccanica razionale
in termini delle coordinate '(0),((0), )(0) del punto Q rispetto al triedro di Frenet in P (0)— che specificano la posizione relativa di Q(0) e P (0). Il vettore Q ! P diventa allora:
Q(s) ! P (s) = '(s)1k
-!r sin
$ s
k
%e1 + r cos
$ s
k
%e2 +
h
2"e3
.+
+ ((s)-! cos
$ s
k
%e1 ! sin
$ s
k
%e2
.+
+ )(s)1k
-h
2"sin$ s
k
%e1 !
h
2"cos
$ s
k
%e2 + r e3
..
(464.10)
D’altra parte la parametrizzazione dell’elica si riesprime facilmente in termini dell’ascissacurvilinea s:
P (s) ! O = r cos$ s
k
%e1 + r sin
$ s
k
%e2 +
h
2"
s
ke3
e basta sommarle membro a membro il vettore Q(s) ! P (s) dato da (464.10) per ottenerel’equazione parametrica della traiettoria di Q:
Q(s) ! O = r cos$ s
k
%e1 + r sin
$ s
k
%e2 +
h
2"
s
ke3+
+ '(s)1k
-!r sin
$ s
k
%e1 + r cos
$ s
k
%e2 +
h
2"e3
.+
+ ((s)-! cos
$ s
k
%e1 ! sin
$ s
k
%e2
.+
+ )(s)1k
-h
2"sin$ s
k
%e1 !
h
2"cos
$ s
k
%e2 + r e3
.,
cui corrispondono le componenti relative a Oe1e2e3:
q1(s) = r cos$s
r
%! r
ksin$s
r
%'(s) ! cos
$s
r
%((s) +
h
2"
1k
sin$s
r
%)(s)
q2(s) = +r sin$s
r
%+
r
kcos
$s
r
%'(s) ! sin
$s
r
%((s) ! h
2"
1k
cos$s
r
%)(s)
q3(s) =h
2"
s
k+
h
2"
1k
'(s) +r
k)(s) % s " R .
(464.11)
Qualora per s = 0 il punto Q(0) giaccia nel piano normale all’elica E in P (0), si ha '(0) = 0e le componenti '(s), ((s), )(0) si riducono alla forma piu semplice:
'(s) =a sin(
$a2 + b2s)$
a2 + b2((0) + ab
1 ! cos($
a2 + b2s)a2 + b2
)(0)
((s) = cos(5
a2 + b2s)((0) +b sin(
$a2 + b2s)$
a2 + b2)(0)
)(s) = !b sin($
a2 + b2s)$a2 + b2
((0) +a2 + b2 cos(
$a2 + b2s)
a2 + b2)(0) .
Stefano Siboni 2412

Universita degli studi di Trento Esercizi di Meccanica razionale
La traiettoria di Q si avvolge attorno all’elica percorsa da P come illustrato nella figuraseguente:
All’aumentare di |#|, ferme restando le altre costanti caratteristiche della curva, le spiredella traiettoria di Q si distribuiscono piu fittamente intorno ad E.
Esercizio 465. Terna di FrenetCon riferimento al problema precedente, e con le stesse notazioni, si dimostri che se all’elicaE si sostituisce una curva biregolare qualunque, di parametrizzazione P (s), e la velocitaangolare del sistema rigido P !Q si assume pari a
*# =$ 1
&$ +
1%b%s (465.1)
allora il punto Q risulta in quiete nella terna di Frenet di E, intesa come terna mobile conorigine nel punto variabile P (s).
SoluzioneL’espressione dell’atto di moto rigido per il sistema P ! Q diventa in questo caso
Q ! P = *# # (Q ! P )
Stefano Siboni 2413

Universita degli studi di Trento Esercizi di Meccanica razionale
e per la presenza del fattore s in *# si riduce all’equazione di"erenziale in s:
d
ds(Q ! P ) = *D # (Q ! P ) (465.2)
dove*D =
1&
$ +1%b
e il vettore di Darboux della curva E in P (s). Si ricorda che il vettore di Darboux soddisfale relazioni, analoghe alle formule di Poisson,
d$
ds= *D # $
dn
ds= *D # n
db
ds= *D # b .
Posto allora, come nella (464.9),
Q ! P = ' $ + ( n + ) b
il primo membro della (465.2) diventa
d
ds(Q ! P ) =
d
ds(' $ + ( n + ) b) =
d'
ds$ +
d(
dsn +
d)
dsb + '
d$
ds+ (
dn
ds+ )
db
ds=
=d'
ds$ +
d(
dsn +
d)
dsb + '*D # $ + ( *D # n + ) *D # b =
=d'
ds$ +
d(
dsn +
d)
dsb + *D # (' $ + ( n + ) b)
mentre il secondo membro vale
*D # (Q ! P ) = *D # (' $ + ( n + ) b)
e l’equazione si riduce pertanto a
d'
ds$ +
d(
dsn +
d)
dsb = 0 .
Si conclude che le componenti del vettore Q!P sono costanti rispetto alla terna di Frenet,mobile lungo E,
'(s) = '(0) ((s) = ((0) )(s) = )(0) % s " R .
Stefano Siboni 2414

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 466. Caratterizzazione delle curve biregolari di parametro arbitrarioSi consideri una curva con parametrizzazione P (+), di classe C2 e regolare su un intervalloreale I. Verificare che la curva risulta biregolare se e soltanto se le derivate P "(+) e P ""(+)sono vettori linearmente indipendenti di R3.
SoluzioneL’ipotesi di regolarita della curva assicura che P "(+) &= 0 % + " I, per cui e sempre possibileintrodurre una ascissa curvilinea(1)
s(+) =
!6
!0
|P "(+)| d+ % + " I
come variabile indipendente in luogo di +. Cio segue dal fatto che |P "(+)| > 0 % + " I e cheds/d+ = |P "(+)|, per cui s(+) e una funzione monotona crescente di +. Il versore tangenteviene allora espresso nella forma
$(+) =P "(+)|P "(+)|
e la sua derivata rispetto ad s diventad$
ds=
1|P "(+)|
d$
d+=
1|P "(+)|
d
d+
$ P "(+)|P "(+)|
%=
1|P "(+)|
d
d+
-7P "(+)2
8!1/2P "(+)
.=
=1
|P "(+)|
-!1
27P "(+)2
8!3/22P "(+) · P ""(+)P "(+) +1
|P "(+)|P ""(+)
.=
=1
|P "(+)|2
-!P "(+) · P ""(+)
|P "(+)|2 P "(+) + P ""(+).
. (466.1)
Per definizione, una curva e biregolare se in ogni suo punto risulta d$/ds &= 0. E alloraevidente che:
(i) se per ogni + " I i vettori P "(+) e P ""(+) sono linearmente indipendenti, l’espressionefinale in (466.1) deve risultare diversa da zero. Qualora non lo fosse si avrebbe infatti:
!P "(+) · P ""(+)|P "(+)|2 P "(+) + P ""(+) = 0
ed esisterebbe quindi una combinazione lineare nulla dei due vettori con almeno uncoe!ciente diverso da zero — quello di P ""(+), che e pari a 1;
(ii) per contro, se d$/ds &= 0 i vettori P "(+) e P ""(+) devono essere linearmente indipen-denti. In caso contrario sussisterebbe infatti una relazione del tipo
P ""(+) = ,(+)P "(+)
per una funzione scalare ,(+) opportuna, e ne deriverebbe quindi
!P "(+) · P ""(+)|P "(+)|2
P "(+) + P ""(+) = !P "(+) · ,(+)P "(+)|P "(+)|2
P "(+) + ,(+)P "(+) = 0 ,
in evidente contraddizione con l’ipotesi.(1) dove !0 e un valore fissato di ! in I
Stefano Siboni 2415

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 467. Asse centrale, centro e momento assiale di un sistema di vettoriapplicati paralleli con risultante non nulloIn una terna cartesiana ortogonale destra Oe1e2e3 si considera il sistema S di vettoriapplicati:
(P1,*v1) (P2,*v2) (P3,*v3) (P4,*v4)con:
P1(0,!1,!1) *v1 = !e1 + 2 e2 ! e3
P2(!2, 1, 3) *v2 = 2 e1 ! 4 e2 + 2 e3
P3(!2,!2, 2) *v3 = !3 e1 + 6 e2 ! 3 e3
P4(3,!5, 2) *v4 = e1 ! 2 e2 + e3 .
Determinare del sistema S:
(a) l’asse centrale, se definito, verificando il risultato;(b) il centro, se definito;(c) il momento rispetto all’asse r di equazione parametrica
x = 12+ + 1 , y = 3+ , z = !4+ + 3 , + " R ,
orientato secondo le + decrescenti.
Soluzione(a) Asse centraleLa determinazione dell’asse centrale di S richiede il calcolo del risultante *R, del momentorisultante in O — *MO — e del prodotto *R # *MO.
RisultanteIl risultante e la somma dei vettori che costituiscono il sistema S e vale percio
*R =49
i=1
*vi = (!e1 + 2 e2 ! e3) + (2 e1 ! 4 e2 + 2 e3)+
+ (!3 e1 + 6 e2 ! 3 e3) + (e1 ! 2 e2 + e3) = !e1 + 2 e2 ! e3 .
Poiche *R &= 0, e definito l’asse centrale a del sistema di vettori applicati.
Momento risultante in OIl momento risultante in O viene calcolato come somma dei momenti di ciascun vettoreapplicato rispetto allo stesso polo O:
*MO =49
i=1
(Pi ! O) # *vi =
= (!e2 ! e3) # (!e1 + 2 e2 ! e3)++ (!2 e1 + e2 + 3 e3) # (2 e1 ! 4 e2 + 2 e3)++ (!2 e1 ! 2 e2 + 2 e3) # (!3 e1 + 6 e2 ! 3 e3)++ (3 e1 ! 5 e2 + 2 e3) # (e1 ! 2 e2 + e3) =
Stefano Siboni 2416

Universita degli studi di Trento Esercizi di Meccanica razionale
=
!!!!!!
e1 e2 e3
0 !1 !1!1 2 !1
!!!!!!+
!!!!!!
e1 e2 e3
!2 1 32 !4 2
!!!!!!+
!!!!!!
e1 e2 e3
!2 !2 2!3 6 !3
!!!!!!+
!!!!!!
e1 e2 e3
3 !5 21 !2 1
!!!!!!=
= (3 e1 + e2 ! e3) + (14 e1 + 10 e2 + 6 e3)++ (!6 e1 ! 12 e2 ! 18 e3) + (!e1 ! e2 ! e3) = 10 e1 ! 2 e2 ! 14 e3 .
Prodotto vettoriale *R # *MO/|*R|2Dalle espressioni precedentemente calcolate si ha il prodotto vettore:
*R # *MO = (!e1 + 2 e2 ! e3) # (10 e1 ! 2 e2 ! 14 e3) =
=
!!!!!!
e1 e2 e3
!1 2 !110 !2 !14
!!!!!!= !30 e1 ! 24 e2 ! 18 e3 ,
per cui:
*R # *MO
|*R|2=
!30 e1 ! 24 e2 ! 18 e3
(!1)2 + 22 + (!1)2=
!30 e1 ! 24 e2 ! 18 e3
6= !5 e1 ! 4 e2 ! 3 e3
Asse centraleL’asse centrale e il luogo dei punti A individuati dai vettori posizione:
A ! O =*R # *MO
|*R|2+ '*R %' " R .
Sostituendo le espressioni precedentemente ricavate si ottiene allora:
A ! O = !5 e1 ! 4 e2 ! 3 e3 + '(!e1 + 2 e2 ! e3) == (!5 ! ')e1 + (!4 + 2')e2 + (!3 ! ')e3 %' " R
e l’equazione parametrica dell’asse centrale a assume la forma:
')
*
x = !5! '
y = !4 + 2'
z = !3! '
%' " R .
Verifica che la retta ottenuta e e!ettivamente l’asse centraleBasta verificare, come da definizione, che rispetto ad un punto qualsiasi di a il momentorisultante di S risulta parallelo a *R. Un punto C dell’asse centrale si ottiene ponendo ' = 0nella relativa parametrizzazione:
C !O = !5 e1 ! 4 e2 ! 3 e3
Stefano Siboni 2417

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui il momento risultante in C del sistema di vettori applicati diventa:
*MC =49
i=1
(Pi ! C)# *vi =
= (5 e1 + 3 e2 + 2 e3) # (!e1 + 2 e2 ! e3)++ (3 e1 + 5 e2 + 6 e3) # (2 e1 ! 4 e2 + 2 e3)++ (3 e1 + 2 e2 + 5 e3) # (!3 e1 + 6 e2 ! 3 e3)++ (8 e1 ! e2 + 5 e3) # (e1 ! 2 e2 + e3) =
=
!!!!!!
e1 e2 e3
5 3 2!1 2 !1
!!!!!!+
!!!!!!
e1 e2 e3
3 5 62 !4 2
!!!!!!+
!!!!!!
e1 e2 e3
3 2 5!3 6 !3
!!!!!!+
!!!!!!
e1 e2 e3
8 !1 51 !2 1
!!!!!!=
= (!7 e1 + 3 e2 + 13 e3) + (34 e1 + 6 e2 ! 22 e3)++ (!36 e1 ! 6 e2 + 24 e3) + (9 e1 ! 3 e2 ! 15 e3) = 0
e, in quanto nullo, e certamente parallelo ad *R.
(b) CentroI vettori applicati di cui si compone il sistema S sono tutti fra loro paralleli:
*v1 = !e1 + 2 e2 ! e3 = *v1 = f1*v1
*v2 = 2 e1 ! 4 e2 + 2 e3 = !2*v1 = f2*v1
*v3 = !3 e1 + 6 e2 ! 3 e3 = 3*v1 = f3 *v1
*v4 = e1 ! 2 e2 + e3 = !*v1 = f4*v1
con *R &= 0 ed i coe!cienti f1, f2, f3, f4 dati da:
f1 = 1 f2 = !2 f3 = 3 f4 = !1 .
Il centro C del sistema di vettori applicati paralleli di risultante non nullo e percio indi-viduato da:
C !O =$ 49
i=1
fi
%!1 49
i=1
fi(Pi ! O) =
= 1(!e2 ! e3) ! 2(!2 e1 + e2 + 3 e3)++ 3(!2 e1 ! 2 e2 + 2 e3) + (!1)(3 e1 ! 5 e2 + 2 e3) == !e2 ! e3 + 4 e1 ! 2 e2 ! 6 e3+
! 6 e1 ! 6 e2 + 6 e3 ! 3 e1 + 5 e2 ! 2 e3 = !5 e1 ! 4 e2 ! 3 e3
Si osservi che l’asse centrale e esprimibile nella forma
A ! O = C ! O + '*R = !5 e1 ! 4 e2 ! 3 e3 + '(!e1 + 2 e2 ! e3) == (!5 ! ')e1 + (!4 + 2')e2 + (!3 ! ')e3 %' " R .
Stefano Siboni 2418

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Momento rispetto all’asse rLa parametrizzazione dell’asse r e data da:
P (+) ! O = (12+ + 1)e1 + 3+ e2 + (!4+ + 3)e3 + " R
con la derivata primaP "(+) = 12 e1 + 3 e2 ! 4 e3 .
Ricordando che l’asse deve intendersi orientato nel senso delle + decrescenti, il versoredirettore di r risulta:
$ = ! P "(+)|P "(+)| = ! 12 e1 + 3 e2 ! 4 e3
|12 e1 + 3 e2 ! 4 e3|= ! 12 e1 + 3 e2 ! 4 e35
122 + 32 + (!4)2= !12 e1 + 3 e2 ! 4 e3
13.
Un punto B della retta orientata si ricava dalla parametrizzazione ponendo per esempio+ = 0 — la scelta piu semplice —
B ! O = P (0) ! O = e1 + 3 e3
Il momento risultante rispetto a B e immediatamente deducibile da *MO, gia calcolato, permezzo della formula del cambiamento del polo:
*MB = *MO + (O ! B) # *R = *MO + *R # (B !O) =
= 10 e1 ! 2 e2 ! 14 e3 +
!!!!!!
e1 e2 e3
!1 2 !11 0 3
!!!!!!=
= 10 e1 ! 2 e2 ! 14 e3 + 6 e1 + 2 e2 ! 2 e3 = 16 e1 ! 16 e3 .
Il momento risultante rispetto all’asse r vale pertanto:
Mr = MB" = *MB · $ = (16 e1 ! 16 e3) ·!12 e1 ! 3 e2 + 4 e3
13=
=16(!12) + (!16)4
13= !256
13.
Esercizio 468. Oscillatore armonico smorzatoUn punto materiale P di massa m = 5 e vincolato a scorrere senza attrito lungo l’asseorizzontale Ox = Oe1 di una terna inerziale Oe1e2e3. Una molla ideale di costante elasticak = 2 congiunge P con l’origine O. Sul punto agisce inoltre una forza *F = 2(e2 # P !(P ,con ( costante positiva. Determinare del sistema:
(a) le equazioni pure del moto;(b) i valori della costante ( per i quali i moti sono oscillatori smorzati;(c) per ( = 2, la posizione e la velocita di P all’istante t = 15"/4 qualora si abbia
P (0) ! O = 3 e1 e P (0) = 0 all’istante t = 0.
Stefano Siboni 2419

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Equazioni pure del motoL’assenza di attrito assicura che l’equazione pura del moto si ottiene proiettando lungo ladirezione tangente e1 l’equazione tratta dal postulato delle reazioni vincolari:
mP = !k(P ! O) + 2(e2 # P ! (P + m*g + *$
essendo m*g il peso e *$ la reazione vincolare. Moltiplicando scalarmente membro a membrol’equazione per il versore direttore e1 dell’asse orizzontale Ox si ottiene allora:
mP · e1 = !k(P ! O) · e1 + 2(e2 # P · e1 ! (P · e1 + m*g · e1 + *$ · e1
e poiche
P !O = x e1 P = x e1 P = x e1 m*g · e1 = 0 *$ · e1 = 0
mentre
2(e2 # P · e1 = 2(e2 # x e1 · e1 = 2(x e2 # e1 · e1 = 2(x e2 · e1 # e1 = 0 ,
l’equazione pura del moto si riduce a
mx = !kx ! (x
ossia a5x + (x + 2x = 0 , (468.1)
che e l’equazione di"erenziale del moto di un oscillatore armonico smorzato unidimensio-nale con costante di frizione ( > 0.
(b) Valori di ( corrispondenti ai moti oscillatori smorzatiLa condizione necessaria e su!ciente per il regime oscillatorio smorzato e che il discrimi-nante dell’equazione caratteristica associata alla (468.1)
5,2 + (, + 2 = 0
sia negativo. Nella fattispecie, si ha
% = (2 ! 4 · 5 · 2 = (2 ! 40 < 0
e quindi i valori richiesti della costante ( sono:
0 < ( <$
40 .
Stefano Siboni 2420

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Posizione e velocita di P all’istante t = 15"/4 per assegnate condizioni inizialiPer ( = 2 l’equazione pura del moto (468.1) diventa
5x + 2x + 2x = 0con l’equazione caratteristica
5,2 + 2, + 2 = 0di radici complesse coniugate:
,1,,2 =!2 ±
$4 ! 4 · 5 · 22 · 5
=!2 ±
$!36
10=
!2 ± 6i
10= !1
5± 3
5i .
La soluzione generale dell’equazione del moto si scrive dunque:
x(t) = c1e!t/5 cos
$35t%
+ c2 e!t/5 sin$3
5t%
% t " R
con la derivata prima
x(t) = c1e!t/5
-!1
5cos$3
5t%! 3
5sin$3
5t%.
+ c2e!t/5
-!1
5sin$3
5t%
+35
cos$3
5t%.
%t " R
in termini delle costanti reali arbitrarie c1 e c2, che vanno determinate sulla base dellecondizioni iniziali. In questo caso l’ipotesi
P (0) !O = 3 e1 P (0) = 0implica che debba aversi
x(0) = 3 x(0) = 0per cui:
3 = x(0) = c1 0 = x(0) = !15c1 +
35c2
e quindi:c1 = 3 c2 = 1 .
La soluzione del problema di Cauchy e dunque
x(t) = 3e!t/5 cos$3
5t%
+ e!t/5 sin$3
5t%
% t " R
con la derivata prima
x(t) = 3 e!t/5
-!1
5cos
$35t%! 3
5sin$3
5t%.
+ e!t/5
-!1
5sin$3
5t%
+35
cos$3
5t%.
%t " R .
All’istante t = 15"/4 si ha infine:
x$15"
4
%= 3 e!3#/4 cos
$35
154
"%
+ e!3#/4 sin$3
5154
"%
=
= 3 e!3#/4 cos$9
4"%
+ e!3#/4 sin$9
4"%
= 3 e!3#/4 1$2
+ e!3#/4 1$2
=4$2
e!3#/4
e
x$15"
4
%= 3 e!3#/4
-!1
5cos
$94"%! 3
5sin$9
4"%.
+ e!3#/4
-!1
5sin$9
4"%
+35
cos$9
4"%.
=
= e!3#/4
-3$!1
5! 3
5
%+$!1
5+
35
%. 1$2
= e!3#/4
-!3
5! 9
5! 1
5+
35
.1$2
= !$
2 e!3#/4 .
Stefano Siboni 2421

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 469. Punto pesante vincolato ad una curva pianaUn punto materiale pesante P , di massa m, e vincolato a scorrere lungo la curva diequazione:
y =1x
+ 4x %x " (1/4, 1) ,
posta nel piano coordinato Oxy il cui asse Oy e diretto verticalmente verso l’alto. Deter-minare:
(a) l’equazione pura del moto e le relative posizioni di equilibrio nell’ipotesi di curva liscia;(b) gli equilibri supponendo che la curva abbia un coe!ciente di attrito radente statico
µs = 0.3.
Soluzione(a) Equazione del moto ed equilibri in assenza di attritoEquazione pura del motoLa parametrizzazione del punto P si esprime naturalmente in termini dell’ascissa x:
P (x) ! O = xe1 +$ 1
x+ 4x
%e2 %x "
$14, 1%
con derivate prima e seconda:
P "(x) = e1 +$! 1
x2+ 4
%e2 P ""(x) =
2x3
e2 (469.1)
definite nello stesso intervallo di x. L’equazione pura del moto si ricava proiettando lungola direzione tangente P "(x) il postulato delle reazioni vincolari:
mP = !mg e2 + *$
ossiamxP "(x) + mx2P ""(x) = !mg e2 + *$ .
Si ha allora:
mxP "(x) · P "(x) + mx2P ""(x) · P "(x) = !mg e2 · P "(x) + *$ · P "(x)
e quindi, per l’ipotesi di vincolo liscio,
mx|P "(x)|2 + mx2P ""(x) · P "(x) = !mg e2 · P "(x)
vale a dire, in virtu delle (469.1),
mx
-1 +
$! 1
x2+ 4
%2.
+ mx2 2x3
$! 1
x2+ 4
%= !mg
$! 1
x2+ 4
%%x "
$14, 1%
.
Stefano Siboni 2422

Universita degli studi di Trento Esercizi di Meccanica razionale
EquilibriGli equilibri corrispondono alle soluzioni statiche, costanti, della precedente equazionepura:
0 = !mg$! 1
x2+ 4
%x "
$14, 1%
e si riducono alla sola posizione x = 1/2 — l’altra radice x = !1/2 e esterna all’intervallodi definizione dell’ascissa.
(b) Equilibri in presenza di attritoSe la curva vincolare presenta un coe!ciente di attrito radente statico µs, la condizione diequilibrio per il punto pesante vincolato al grafico di una funzione y = f(x), essendo Oyl’asse verticale, assume la forma ben nota
|f "(x)| ' µs ;
la pendenza della retta tangente al grafico della curva vincolare nel punto di equilibrio nondeve discostarsi da 0 per piu di µs. Nella fattispecie si ha la condizione, da soddisfare inx " (1/4, 1), !!!!!
1x2
+ 4!!!! ' µs
ossia la doppia diseguaglianza
!µs ' ! 1x2
+ 4 ' µs
che moltiplicata per la quantita positiva x2 si riduce a
!µsx2 ' 4x2 ! 1 ' µsx
2
ed equivale al sistema di disequazioni:')
*!µsx2 ' 4x2 ! 1
4x2 ! 1 ' µsx2
ovvero a ')
*1 ' (4 + µs)x2
(4 ! µs)x2 ' 1 .(469.2)
Ricordando che nel caso considerato e µs < 1 — come avviene tipicamente — il sistema(469.2) si puo esprimere nella forma equivalente
'()
(*
14 + µs
' x2
x2 ' 14 ! µs
Stefano Siboni 2423
Universita degli studi di Trento Esercizi di Meccanica razionale
dalla quale si deduce, escludendo i valori negativi di x,
'()
(*
1$4 + µs
' x
x ' 1$4 ! µs
.
Le ascisse dei punti di equlibrio sono percio tutte e sole quelle che soddisfano la doppiadiseguaglianza
1$4 + µs
' x ' 1$4 ! µs
purche ricomprese nell’intervallo 1/4 < x < 1.Per µs = 0.3 si ha
1$4.3
' x ' 1$3.7
ossia, approssimativamente,
0.48224282 ' x ' 0.51987524 .
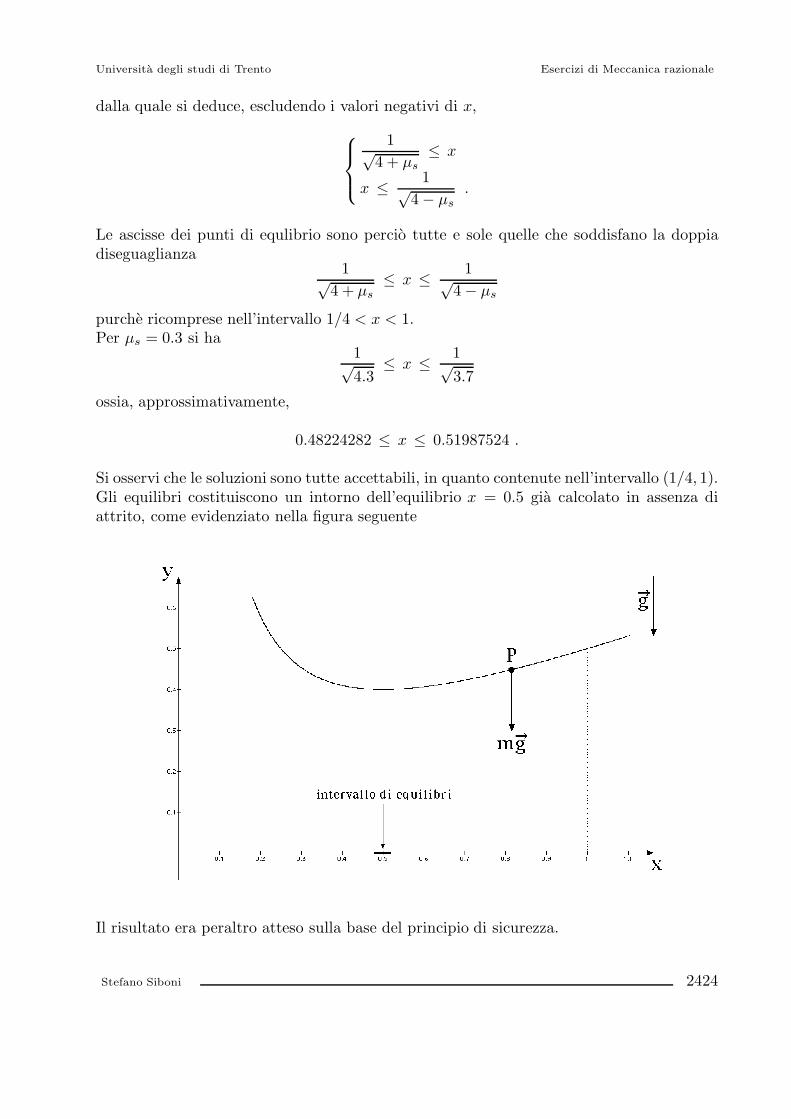
Si osservi che le soluzioni sono tutte accettabili, in quanto contenute nell’intervallo (1/4, 1).Gli equilibri costituiscono un intorno dell’equilibrio x = 0.5 gia calcolato in assenza diattrito, come evidenziato nella figura seguente
Il risultato era peraltro atteso sulla base del principio di sicurezza.
Stefano Siboni 2424
Universita degli studi di Trento Esercizi di Meccanica razionale
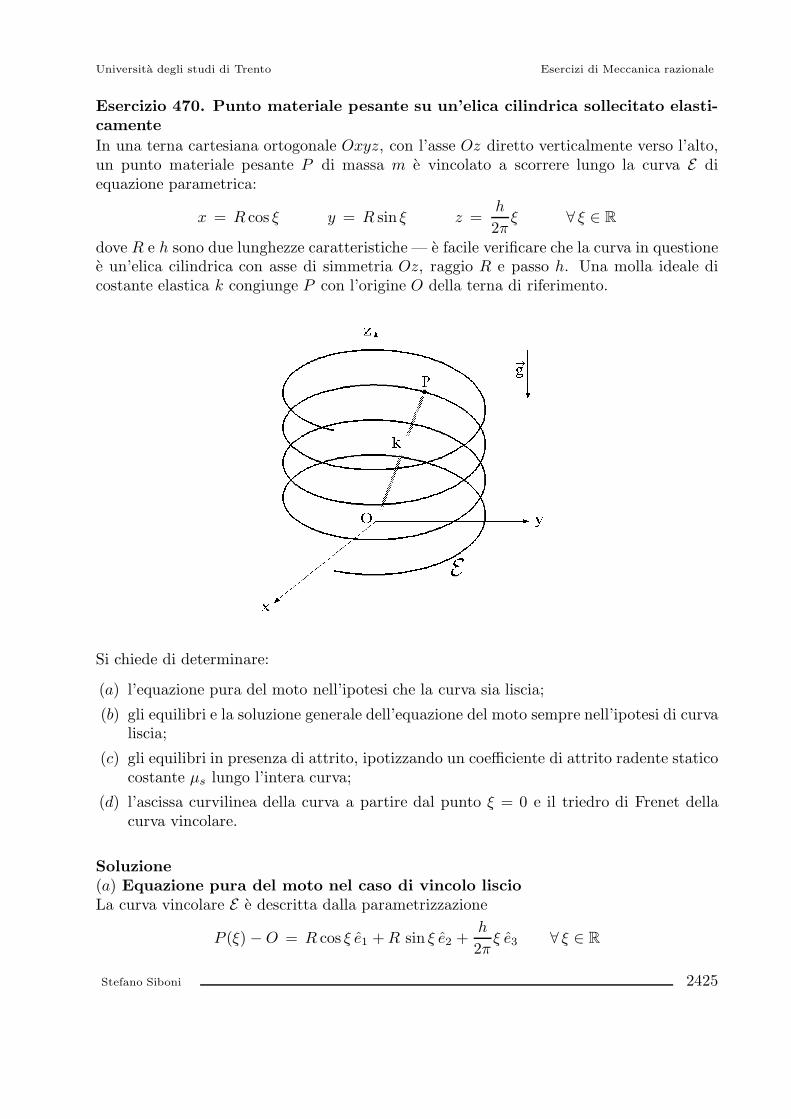
Esercizio 470. Punto materiale pesante su un’elica cilindrica sollecitato elasti-camenteIn una terna cartesiana ortogonale Oxyz, con l’asse Oz diretto verticalmente verso l’alto,un punto materiale pesante P di massa m e vincolato a scorrere lungo la curva E diequazione parametrica:
x = R cos + y = R sin + z =h
2"+ % + " R
dove R e h sono due lunghezze caratteristiche — e facile verificare che la curva in questionee un’elica cilindrica con asse di simmetria Oz, raggio R e passo h. Una molla ideale dicostante elastica k congiunge P con l’origine O della terna di riferimento.
Si chiede di determinare:
(a) l’equazione pura del moto nell’ipotesi che la curva sia liscia;(b) gli equilibri e la soluzione generale dell’equazione del moto sempre nell’ipotesi di curva
liscia;(c) gli equilibri in presenza di attrito, ipotizzando un coe!ciente di attrito radente statico
costante µs lungo l’intera curva;(d) l’ascissa curvilinea della curva a partire dal punto + = 0 e il triedro di Frenet della
curva vincolare.
Soluzione(a) Equazione pura del moto nel caso di vincolo liscioLa curva vincolare E e descritta dalla parametrizzazione
P (+) ! O = R cos + e1 + R sin + e2 +h
2"+ e3 % + " R
Stefano Siboni 2425

Universita degli studi di Trento Esercizi di Meccanica razionale
con derivata prima
P "(+) = !R sin + e1 + R cos + e2 +h
2"e3
e derivata secondaP ""(+) = !R cos + e1 !R sin + e2 .
Il postulato delle reazioni vincolari permette di scrivere l’equazione
mP = !mg e3 ! k[P (+) ! O] + *$
ovvero, essendo P = +P "(+) + +2P ""(+),
m+P "(+) + m+2P ""(+) = !mg e3 ! k[P (+) ! O] + *$ .
L’equazione pura del moto si ottiene proiettando la relazione precedente lungo la direzioneP "(+) tangente al vincolo:
m+P "(+)2 + m+2P ""(+) · P "(+) = !mg e3 · P "(+) ! k[P (+) ! O] · P "(+) (470.1)
in virtu della condizione di vincolo liscio *$ · P "(+) = 0. Osservato che
P "(+)2 = R2 +h2
4"2
e cheP ""(+) · P "(+) = !R cos +(!R sin +) + (!R sin +)R cos + = 0
mentre!mg e3 · P "(+) = !mg
h
2"e
! k[P (+) ! O] · P "(+) =
= ! k
-R cos + e1 + R sin + e2 +
h
2"+ e3
.·-!R sin + e1 + R cos + e2 +
h
2"e3
.=
= ! k
-R cos +(!R sin +) + R sin + R cos + +
h
2"+
h
2"
.= !k
h2
4"2+ ,
l’equazione (470.1) si riduce a:
m$R2 +
h2
4"2
%+ = !mg
h
2"! k
h2
4"2+
cioe
m$R2 +
h2
4"2
%+ + k
h2
4"2+ = !mg
h
2". (470.2)
Stefano Siboni 2426

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Equilibri e soluzione generale nel caso di vincolo liscioNell’ipotesi di vincolo liscio, le posizioni di equilibrio vengono ricavate come soluzionistatiche — costanti — dell’equazione del moto (470.2). Si ha allora
kh2
4"2+ = !mg
h
2"
e quindi l’unica posizione di equilibrio individuata da
+ = !mgh
2"
4"2
kh2= !2"
mg
kh.
La soluzione generale dell’equazione (470.2) si puo ricavare facilmente introducendo ilcambiamento di variabile:
+ = - ! 2"mg
kh
in virtu del quale l’equazione del moto diventa
m$R2 +
h2
4"2
%- + k
h2
4"2- = 0
ed e riconoscibile come l’equazione di un oscillatore armonico semplice unidimensionale dipulsazione
# ="
k
m
h
2""R2 +
h2
4"2
in modo che la soluzione generale risulta della forma
-(t) = c1 cos(#t) + c2 sin(#t) % t " R
con c1 e c2 costanti reali arbitrarie. Nella variabile + la soluzione generale si scrive pertanto:
+(t) = c1 cos(#t) + c2 sin(#t) ! 2"mg
kh% t " R .
Essa descrive un moto armonico semplice di pulsazione # e ampiezza e fase arbitrarie,centrato sulla posizione di equilibrio + = !2"mg/kh.
(c) Equilibri in presenza di attrito (µs costante)Per lo stato di quiete in una posizione di equilibrio del sistema, il postulato delle reazionivincolari prescrive la condizione:
0 = !mg e3 ! k[P (+) ! O] + *$
Stefano Siboni 2427

Universita degli studi di Trento Esercizi di Meccanica razionale
dalla quale si ricava la reazione vincolare occorrente a realizzare lo stato di quiete inquestione:
*$ = mg e3 + k[P (+) ! O] = mg e3 + k$R cos + e1 + R sin + e2 +
h
2"+ e3
%=
= kR cos + e1 + kR sin + e2 +$mg +
kh
2"+%e3 .
Di questa reazione vincolare si devono determinare le componenti tangente e ortogonalealla curva vincolare, per poi fare uso della legge di Coulomb-Morin dell’attrito radentestatico. Il versore tangente alla curva in un punto generico di questa e dato da
$(+) =P "(+)|P "(+)| =
!R sin + e1 + R cos + e2 +h
2"e3
"R2 +
h2
4"2
per cui
*$ · $ =$mg +
kh
2"+% h
2""R2 +
h2
4"2
e la componente tangente alla curva della reazione vincolare vale
*$ · $ $ =$mg +
kh
2"+% h
2"
R2 +h2
4"2
$!R sin + e1 + R cos + e2 +
h
2"e3
%.
La componente di *$ ortogonale alla curva e quella residua
*$ ! *$ · $ $ = kR cos + e1 + kR sin + e2 +$mg +
kh
2"+%e3!
!$mg +
kh
2"+% h
2"
R2 +h2
4"2
$!R sin + e1 + R cos + e2 +
h
2"e3
%
che separando i vettori componenti diventa:
*$ ! *$ · $ $ =
:
;<kR cos + +$mg +
kh
2"+% h
2"
R2 +h2
4"2
R sin +
=
>? e1+
+
:
;<kR sin + !$mg +
kh
2"+% h
2"
R2 +h2
4"2
R cos +
=
>? e2+
+
:
;<mg +kh
2"+ !
$mg +
kh
2"+% h2
4"2
R2 +h2
4"2
=
>? e3
Stefano Siboni 2428

Universita degli studi di Trento Esercizi di Meccanica razionale
e quindi:
*$ ! *$ · $ $ =
:
;<kR cos + +$mg +
kh
2"+% h
2"
R2 +h2
4"2
R sin +
=
>? e1+
+
:
;<kR sin + !$mg +
kh
2"+% h
2"
R2 +h2
4"2
R cos +
=
>? e2+
+$mg +
kh
2"+% R2
R2 +h2
4"2
e3 .
Il modulo quadrato della componente ortogonale di *$ diventa allora:
|*$ ! *$ · $ $ |2 =
= k2R2cos2+ +$mg +
kh
2"+%2
h2
4"2R2sin2+
$R2 +
h2
4"2
%2+ 2kR cos +
$mg +
kh
2"+% h
2"R sin +
R2 +h2
4"2
+
= k2R2sin2+ +$mg +
kh
2"+%2
h2
4"2R2cos2+
$R2 +
h2
4"2
%2! 2kR sin +
$mg +
kh
2"+% h
2"R cos +
R2 +h2
4"2
+
+$mg +
kh
2"+%2 R4
$R2 +
h2
4"2
%2
e si semplifica in
|*$ ! *$ · $ $ |2 = k2R2 +$mg +
kh
2"+%2
h2
4"2R2
$R2 +
h2
4"2
%2+$mg +
kh
2"+%2 R4
$R2 +
h2
4"2
%2=
= k2R2 +$mg +
kh
2"+%2 R2
R2 +h2
4"2
.
In modo analogo viene calcolato il modulo quadrato della componente di *$ tangente alvincolo:
|*$ · $ $ |2 = |*$ · $ |2 =$mg +
kh
2"+%2
h2
4"2
R2 +h2
4"2
.
Stefano Siboni 2429

Universita degli studi di Trento Esercizi di Meccanica razionale
La legge di Coulomb-Morin dell’attrito radente statico porge cosı la condizione di equilibrio:
|*$ · $ $ | ' µs|*$ ! *$ · $ $ |
che equivale a|*$ · $ $ |2 ' µ2
s|*$ ! *$ · $ $ |2
e quindi a
$mg +
kh
2"+%2
h2
4"2
R2 +h2
4"2
' µ2s
:
;<k2R2 +$mg +
kh
2"+%2 R2
R2 +h2
4"2
=
>? . (470.3)
Eliminando i denominatori, la diseguaglianza precedente si riduce a
$mg +
kh
2"+%2 h2
4"2' µ2
sR2
-k2$R2 +
h2
4"2
%+$mg +
kh
2"+%2.
e riportati a primo membro i termini in + diventa
$mg +
kh
2"+%2$ h2
4"2! µ2
sR2%
' µ2sR
2k2$R2 +
h2
4"2
%. (470.4)
Si devono distinguere due casi:
(i) se (h2/4"2) ' µ2sR
2, vale a dire µs ( h/2"R la condizione (470.4) risulta sempresoddisfatta, essendo negativo o nullo il primo membro e positivo il secondo, per cuitutte le configurazioni del sistema sono di equilibrio. Da notare che la condizionericorre per tutti i valori su!cientemente elevati del coe!ciente di attrito radentestatico;
(ii) se viceversa e (h2/4"2) > µ2sR
2, ossia µs < h/2"R, l’equilibrio ricorre per tutti i valoridel parametro + tali che
$mg +
kh
2"+%2
'µ2
sR2k2
$R2 +
h2
4"2
%
h2
4"2! µ2
sR2
ovvero, equivalentemente,
!!!!mg +kh
2"+
!!!! 'µsRk
"R2 +
h2
4"2"
h2
4"2! µ2
sR2
. (470.5)
Stefano Siboni 2430

Universita degli studi di Trento Esercizi di Meccanica razionale
Come ci si aspetta, la disequazione (470.5) rappresenta un intorno della configurazione+ = !2"mg/kh, l’unico equilibrio ammesso dal sistema nel caso di curva E liscia —per il quale il primo membro di (470.5) si annulla.
(d) Ascissa curvilinea e triedro di FrenetCome esercizio puramente geometrico, calcoliamo l’ascissa curvilinea di E a partire dalpunto + = 0, la curvatura e l’espressione del triedro di Frenet, cioe dei versori tangente,normale e binormale in funzione del parametro + " R.
Ascissa curvilinea a partire da + = 0L’ascissa curvilinea lungo E a partire dal punto + = 0 e data, per definizione, dall’integrale
s(+) =
!6
0
|P "(+)| d+ =
!6
0
"R2 +
h2
4"2d+ =
"R2 +
h2
4"2+ .
Esiste quindi una relazione di semplice proporzionalita diretta fra l’ascissa curvilinea ed ilparametro +.
Versore tangente a E in P (+)Il versore tangente alla curva in un generico punto P (+) di questa e gia stato calcolato inprecedenza. Si richiama qui di seguito il risultato:
$(+) =P "(+)|P "(+)| =
!R sin + e1 + R cos + e2 +h
2"e3
"R2 +
h2
4"2
.
Versore normale a E in P (+)La curvatura 1/% ed il versore normale n sono dafiniti dalla relazione
d$
ds=
1%
n .
Nella fattispecie si ha:
d$
ds=
1|P "(+)|
d$
d+(+) =
1"R2 +
h2
4"2
!R cos + e1 ! R sin + e2"R2 +
h2
4"2
=
=R
R2 +h2
4"2
(! cos + e1 ! sin + e2)
per cui:
1%(+)
=R
R2 +h2
4"2
e n(+) = ! cos + e1 ! sin + e2 .
Stefano Siboni 2431
Universita degli studi di Trento Esercizi di Meccanica razionale
Si osservi che il versore normale punta verso l’asse del cilindro di giacitura dell’elica; piuprecisamente verso il centro della circonferenza ottenuta sezionando il cilindro con un pianopassante per P (+) ed ortogonale all’asse del cilindro stesso.
Versore binormale a E in P (+)La definizione del versore binormale porge l’espressione:
b(+) = $(+) # n(+) =!R sin + e1 + R cos + e2 +
h
2"e3
"R2 +
h2
4"2
# (! cos + e1 ! sin + e2) =
=1"
R2 +h2
4"2
!!!!!!
e1 e2 e3
!R sin + R cos + h/2"! cos + ! sin + 0
!!!!!!=
=1"
R2 +h2
4"2
$ h
2"sin + e1 !
h
2"cos + e2 + R e3
%.
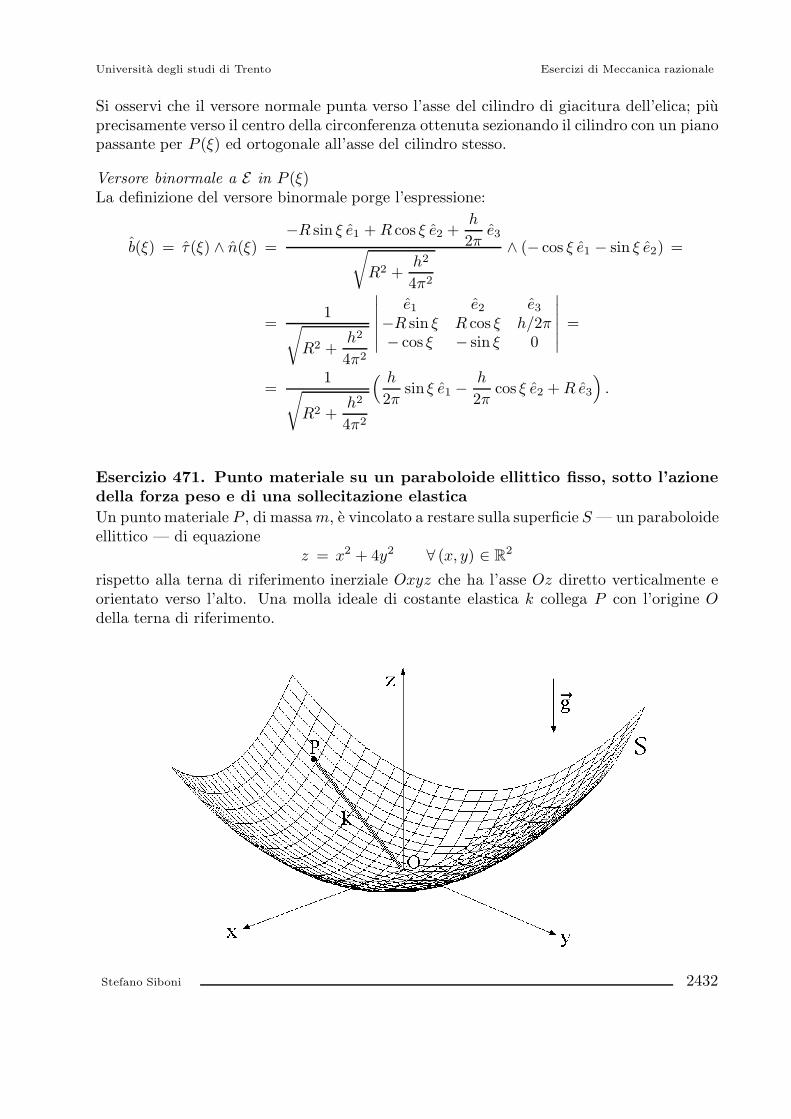
Esercizio 471. Punto materiale su un paraboloide ellittico fisso, sotto l’azionedella forza peso e di una sollecitazione elasticaUn punto materiale P , di massa m, e vincolato a restare sulla superficie S — un paraboloideellittico — di equazione
z = x2 + 4y2 % (x, y) " R2
rispetto alla terna di riferimento inerziale Oxyz che ha l’asse Oz diretto verticalmente eorientato verso l’alto. Una molla ideale di costante elastica k collega P con l’origine Odella terna di riferimento.
Stefano Siboni 2432

Universita degli studi di Trento Esercizi di Meccanica razionale
Si chiede di:
(a) scrivere le equazioni pure del moto del sistema qualora la superficie si possa assumereliscia;
(b) determinare gli equilibri del sistema, sempre nell’ipotesi di superficie liscia;
(c) caratterizzare gli equilibri del sistema nel caso in cui gli attriti non siano trascurabilie il coe!ciente di attrito statico µs possa considerarsi costante lungo tutta S.
Soluzione(a) Equazioni pure del moto nel caso di superficie lisciaLa superficie S e il grafico della funzione z = x2 + 4y2, per cui la sua parametrizzazionenaturale assume la forma
P (x, y) ! O = x e1 + y e2 + (x2 + 4y2) e3 , (x, y) " R2 ,
con le derivate parziali prime
.P
.x(x, y) = e1 + 2x e3
.P
.y(x, y) = e2 + 8y e3
ed il vettore normale
.P
.x(x, y) # .P
.y(x, y) =
!!!!!!
e1 e2 e3
1 0 2x0 1 8y
!!!!!!= !2x e1 ! 8y e2 + e3 (471.1)
che risultando sempre non nullo assicura la regolarita della superficie vincolare. Per unqualsiasi moto possibile P (t) = P [x(t), y(t)], con x(t) e y(t) funzioni C2 del tempo, lavelocita e l’accelerazione istantanea sono date dalle relazioni:
P =.P
.xx +
.P
.yy = (e1 + 2x e3)x + (e2 + 8y e3)y
P = (e1 + 2x e3)x + (e2 + 8y e3)y + 2x2e3 + 8y2e3 .
Il postulato delle reazioni vincolari conduce all’equazione
mP = !mg e3 ! k(P ! O) + *$ (471.2)
in cui la reazione vincolare e sempre normale alla superficie vincolare in qualsiasi posizioneP (x, y) il punto materiale possa occupare, per cui:
.P
.x(x, y) · *$ = 0
.P
.y(x, y) · *$ = 0 %(x, y) " R2 .
Stefano Siboni 2433

Universita degli studi di Trento Esercizi di Meccanica razionale
Le equazioni pure del moto si ottengono allora proiettando la (471.2) lungo i vettori tan-genti e linearmente indipendenti .P/.x, .P/.y:
'((()
(((*
mP · .P
.x(x, y) = !mg e3 ·
.P
.x(x, y) ! k(P ! O) · .P
.x(x, y)
mP · .P
.y(x, y) = !mg e3 ·
.P
.y(x, y) ! k(P ! O) · .P
.y(x, y)
ossia, eseguiti i calcoli,')
*m7(1 + 4x2)x + 16xy y + (2x2 + 8y2)2x
8= !mg 2x ! k
7x + 2x(x2 + 4y2)
8
m716xy x + (1 + 64y2)y + (2x2 + 8y2)8y
8= !mg 8y ! k
7y + 8y(x2 + 4y2)
8
e quindi:')
*m7(1 + 4x2)x + 16xy y + 4x(x2 + 4y2)
8= !2mgx! kx
71 + 2(x2 + 4y2)
8
m716xy x + (1 + 64y2)y + 16y(x2 + 4y2)
8= !8mgy ! ky
71 + 8(x2 + 4y2)
8.
(471.3)
(b) Equilibri nel caso di superficie lisciaGli equilibri del punto materiale sulla superficie liscia si identificano con le soluzioni statichedelle equazioni pure del moto (471.3), e soddisfano percio il sistema di equazioni algebrichenon lineari: '
)
*0 = !2mgx! kx
71 + 2(x2 + 4y2)
8
0 = !8mgy ! ky71 + 8(x2 + 4y2)
8
che puo riformularsi equivalentemente come'(((()
((((*
!kx
-2mg
k+ 1 + 2(x2 + 4y2)
.= 0
!ky
-8mg
k+ 1 + 8(x2 + 4y2)
.= 0 .
Siccome le espressioni entro parentesi quadre assumono comunque segno positivo, la solasoluzione del sistema e dunque
(x, y) = (0, 0)
che individua l’unica configurazione di equilibrio del punto vincolato — l’origine O.
(c) Caratterizzazione degli equilibri nel caso di superficie scabraNel caso che la superficie abbia un coe!ciente di attrito radente statico µs, l’individuazionedegli equilibri deve essere ottenuta applicando la definizione: si calcola la reazione vinco-lare occorrente a mantere il punto in quiete nella configurazione di prova P (x, y), se ne
Stefano Siboni 2434

Universita degli studi di Trento Esercizi di Meccanica razionale
determinano le componenti normale e tangente alla superficie, e si impone infine che dettecomponenti verifichino la legge di Coulomb-Morin dell’attrito radente statico.Per lo stato di quiete nella generica posizione P (x, y) il postulato delle reazioni vincolariimpone che sia soddisfatta l’equazione
0 = !mg e3 ! k[P (x, y) ! O] + *$
dalla quale si deduce l’espressione della razione vincolare
*$ = mg e3 + k[P (x, y) ! O] = mg e3 + kx e1 + ky e2 + k(x2 + 4y2)e3 =
= kx e1 + ky e2 + [mg + k(x2 + 4y2)]e3
Componente normale della reazione vincolareIl versore normale alla superficie nella posizione considerata viene ottenuto normalizzandoil vettore normale (471.1):
n(x, y) =!2x e1 ! 8y e2 + e3
|! 2x e1 ! 8y e2 + e3|=
!2x e1 ! 8y e2 + e354x2 + 64y2 + 1
in modo che
*$ · n =kx(!2x) + ky(!8y) + mg + k(x2 + 4y2)5
1 + 4x2 + 64y2=
!2kx2 ! 8ky2 + mg + kx2 + 4ky2
51 + 4x2 + 64y2
e la componente normale di *$ risulta
*$ · n n =mg ! kx2 ! 4ky2
1 + 4x2 + 64y2(!2x e1 ! 8y e2 + e3) .
Componente tangente della reazione vincolareLa componente di *$ tangente alla superficie e quella residua:
*$! *$ · n n = kx e1 + ky e2 + [mg + k(x2 + 4y2)]e3 +mg ! kx2 ! 4ky2
1 + 4x2 + 64y2(2x e1 + 8y e2 ! e3)
che evidenziando i vettori componenti lungo le direzioni coordinate diventa:
*$ ! *$ · n n =+
kx + 2xmg ! kx2 ! 4ky2
1 + 4x2 + 64y2
,e1+
++
ky + 8ymg ! kx2 ! 4ky2
1 + 4x2 + 64y2
,e2+
+-mg + k(x2 + 4y2) +
!mg + kx2 + 4ky2
1 + 4x2 + 64y2
.e3
Stefano Siboni 2435

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
*$ ! *$ · n n = mgx
-k
mg+
21 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.
e1+
+ mgy
-k
mg+
81 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.
e2+
+ mg
-1 +
k
mg(x2 + 4y2) ! 1
1 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.
e3 .
Caratterizzazione degli equilibriLa condizione necessaria e su!ciente per l’equilibrio e data dalla legge di Coulomb-Morin:
|*$ ! *$ · n n| ' µs|*$ · n n|
ed equivale a1
m2g2|*$ ! *$ · n n|2 ' µ2
s1
m2g2|*$ · n|2
essendo:1
m2g2|*$ · n|2 =
11 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%2
e:
1m2g2
|*$ ! *$ · n n|2 = x2
-k
mg+
21 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.2
+
+ y2
-k
mg+
81 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.2
+
+-1 +
k
mg(x2 + 4y2) ! 1
1 + 4x2 + 64y2
$1 ! k
mgx2 ! 4
k
mgy2%.2
.
Posto per brevita , = k/mg, la condizione di equilibrio diventa pertanto:
x2
-, +
21 + 4x2 + 64y2
@1 ! ,x2 ! 4,y2
A.2
+
+ y2
-, +
81 + 4x2 + 64y2
@1 ! ,x2 ! 4,y2
A.2
+
+-1 + ,x2 + 4,y2 ! 1
1 + 4x2 + 64y2
@1 ! ,x2 ! 4,y2
A.2
'
' µ2s
11 + 4x2 + 64y2
@1 ! ,x2 ! 4,y2
A2
(471.4)
La disequazione e certamente soddisfatta per (x, y) = (0, 0), riducendosi in tal caso a0 ' µ2
s . Poiche il primo ed il secondo membro sono funzioni continue delle variabili
Stefano Siboni 2436
Universita degli studi di Trento Esercizi di Meccanica razionale
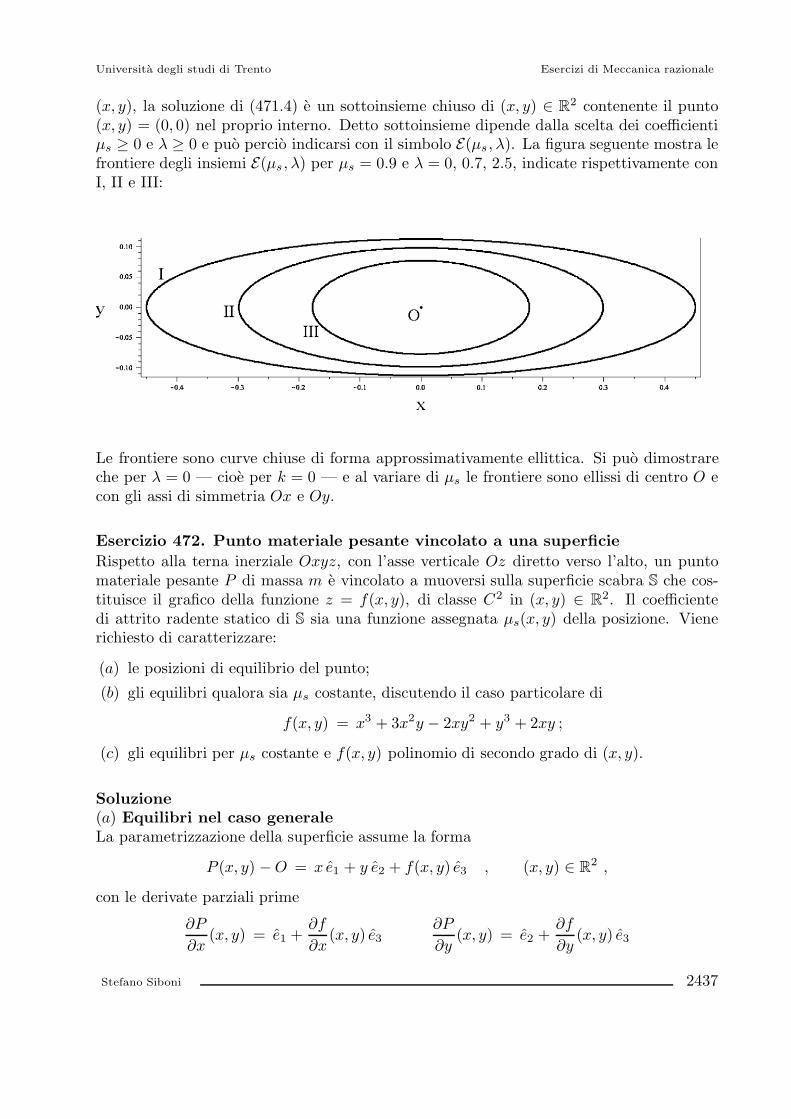
(x, y), la soluzione di (471.4) e un sottoinsieme chiuso di (x, y) " R2 contenente il punto(x, y) = (0, 0) nel proprio interno. Detto sottoinsieme dipende dalla scelta dei coe!cientiµs ( 0 e , ( 0 e puo percio indicarsi con il simbolo E(µs ,,). La figura seguente mostra lefrontiere degli insiemi E(µs ,,) per µs = 0.9 e , = 0, 0.7, 2.5, indicate rispettivamente conI, II e III:
Le frontiere sono curve chiuse di forma approssimativamente ellittica. Si puo dimostrareche per , = 0 — cioe per k = 0 — e al variare di µs le frontiere sono ellissi di centro O econ gli assi di simmetria Ox e Oy.
Esercizio 472. Punto materiale pesante vincolato a una superficieRispetto alla terna inerziale Oxyz, con l’asse verticale Oz diretto verso l’alto, un puntomateriale pesante P di massa m e vincolato a muoversi sulla superficie scabra S che cos-tituisce il grafico della funzione z = f(x, y), di classe C2 in (x, y) " R2. Il coe!cientedi attrito radente statico di S sia una funzione assegnata µs(x, y) della posizione. Vienerichiesto di caratterizzare:
(a) le posizioni di equilibrio del punto;(b) gli equilibri qualora sia µs costante, discutendo il caso particolare di
f(x, y) = x3 + 3x2y ! 2xy2 + y3 + 2xy ;
(c) gli equilibri per µs costante e f(x, y) polinomio di secondo grado di (x, y).
Soluzione(a) Equilibri nel caso generaleLa parametrizzazione della superficie assume la forma
P (x, y) !O = x e1 + y e2 + f(x, y) e3 , (x, y) " R2 ,
con le derivate parziali prime
.P
.x(x, y) = e1 +
.f
.x(x, y) e3
.P
.y(x, y) = e2 +
.f
.y(x, y) e3
Stefano Siboni 2437

Universita degli studi di Trento Esercizi di Meccanica razionale
ed il vettore normale
.P
.x(x, y) # .P
.y(x, y) = !.f
.x(x, y) e1 ! .f
.y(x, y) e2 + e3 .
Posto per brevita
R =$.f
.x(x, y)
%2+$.f
.y(x, y)
%2+ 1
ed omessa l’indicazione esplicita degli argomenti (x, y), il versore normale alla superficie siriduce quindi a
n =1$R
$!.f
.xe1 !
.f
.ye2 + e3
%.
Per mantenere il punto in quiete in una posizione P (x, y) occorre applicare una reazionevincolare:
*$ = mg e3
la cui componente normale alla superficie si scrive
*$ · n = mg e3 · n = mg1$R
(472.1)
mentre quella tangente vale
*$ ! *$ · n n = mg e3 !mg
R
$!.f
.xe1 !
.f
.ye2 + e3
%=
=mg
R
-.f
.xe1 +
.f
.ye2 + (R ! 1) e3
.=
=mg
R
B.f
.xe1 +
.f
.ye2 +
-$.f
.x
%2+$.f
.y
%2.e3
C.
(472.2)
La condizione di equilibrio diventa allora
|*$ ! *$ · n n| ' µs|*$ · n|
ossia, elevando al quadrato ambo i membri della diseguaglianza,
|*$ ! *$ · n n|2 ' µ2s|*$ · n|2
e sostituendo le relazioni (472.1)-(472.2)
m2g2
R2
B$.f
.x
%2+$.f
.y
%2+-$.f
.x
%2+$.f
.y
%2.2C
' µ2sm2g2
R,
diseguaglianza che e immediato semplificare in
$.f
.x
%2+$.f
.y
%2+-$.f
.x
%2+$.f
.y
%2.2
' µ2s
-$.f
.x
%2+$.f
.y
%2+ 1
.. (472.3)
Stefano Siboni 2438

Universita degli studi di Trento Esercizi di Meccanica razionale
Per scrivere quest’ultima diseguaglianza in una forma piu semplice conviene introdurre lanotazione
+ =$.f
.x
%2+$.f
.y
%2( 0
in modo da riesprimere la (472.3) come
+ + +2 ' µ2s(+ + 1) (472.4)
cioe+(+ + 1) ' µ2
s(+ + 1)
ed infine(+ ! µ2
s)(+ + 1) ' 0 ,
dove il polinomio in + a primo membro ammette la radice negativa + = !1 e quellapositiva + = µ2
s . E allora evidente che tale polinomio assume valori non positivi soltantonell’intervallo + " [!1, µ2
s]; considerato che per definizione deve essere + ( 0, si concludeche la disequazione (472.4) e soddisfatta se e solo se + " [0, µ2
s], e che percio la condizionedi equilibrio (472.3) equivale semplicemente a
$.f
.x(x, y)
%2+$.f
.y(x, y)
%2' µ2
s(x, y) . (472.5)
La diseguaglianza ottenuta fornisce la completa caratterizzazione delle posizioni di equili-brio del punto P sulla superficie S. Ovviamente, fra gli equilibri si devono sempre annove-rare i punti critici di f , dove risulta 0 ' µ2
s e la normale a S e diretta verticalmente. Seµs(x, y) e una funzione continua in R2, l’insieme delle posizioni di equilibrio viene alloraindividuato da:
# =D
(x, y) " R2 :$.f
.x(x, y)
%2+$.f
.y(x, y)
%2! µ2
s(x, y) ' 0E
e si identifica con l’immagine inversa del sottoinsieme chiuso di R:
(!), 0]
attraverso la funzione continua di R2 in R:
/ : (x, y) " R2 !!!!!!!!*$.f
.x(x, y)
%2+$.f
.y(x, y)
%2! µ2
s(x, y) " R
e costituisce percio(1) un sottoinsieme chiuso di R2. I punti in cui la funzione ausiliaria/ assume segno negativo sono tutti punti interni di #, come conseguenza del teorema dipermanenza del segno delle funzioni continue: se /(x0, y0) < 0 per (x0, y0) " R2 opportuno,esiste un intorno sferico di (x0, y0) nei cui punti (x, y) e ancora /(x, y) < 0. Nell’interno di
(1) Una proprieta fondamentale delle funzioni continue e che l’immagine inversa continua di un chiuso e chiusa
Stefano Siboni 2439
Universita degli studi di Trento Esercizi di Meccanica razionale
# vanno ricompresi anche tutti i punti critici (x, y) di f nei quali sia µs(x, y) > 0, avendosiinfatti /(x, y) = !µs(x, y) < 0. Da notare infine che, in generale, # puo risultare nonconnesso.
(b) Equilibri nel caso di µs costanteNel caso che il coe!ciente di attrito radente statico sia costante la condizione di equilibrio(472.5) si riduce a: $.f
.x(x, y)
%2+$.f
.y(x, y)
%2' µ2
s
ed individua l’insieme #(µs) delle posizioni di equilibrio che costituisce un sottoinsieme diR2. E evidente che al crescere di µs l’insieme #(µs) diventa sempre piu ampio, nel sensoche vale l’inclusione:
µs < µ"s =+ #(µs) , #(µ"
s) .
Se la curva vincolare e il grafico della funzione:
f(x, y) = x3 + 3x2y ! 2xy2 + y3 + 2xy
si hanno le derivate parziali prime:.f
.x(x, y) = 3x2 + 6xy ! 2y2 + 2y
.f
.y(x, y) = 3x2 ! 4xy + 3y2 + 2x
e la condizione di equilibrio
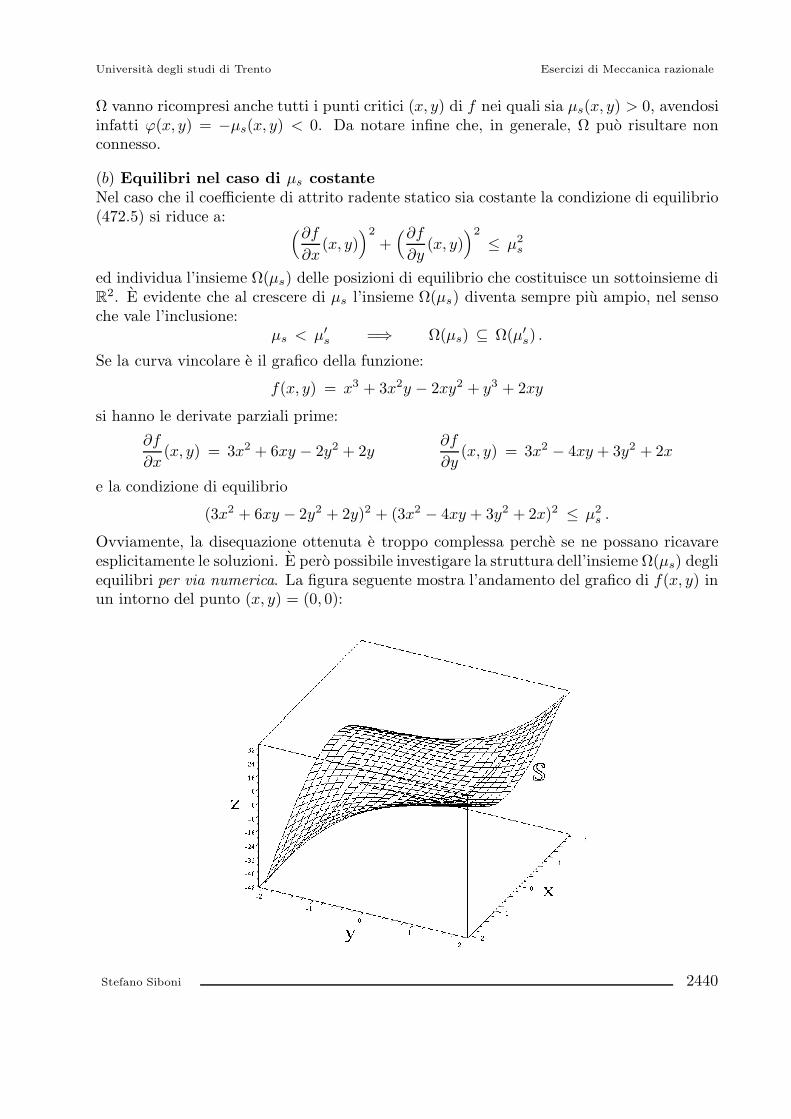
(3x2 + 6xy ! 2y2 + 2y)2 + (3x2 ! 4xy + 3y2 + 2x)2 ' µ2s .
Ovviamente, la disequazione ottenuta e troppo complessa perche se ne possano ricavareesplicitamente le soluzioni. E pero possibile investigare la struttura dell’insieme #(µs) degliequilibri per via numerica. La figura seguente mostra l’andamento del grafico di f(x, y) inun intorno del punto (x, y) = (0, 0):
Stefano Siboni 2440
Universita degli studi di Trento Esercizi di Meccanica razionale
I punti critici della funzione f corrispondono ai punti di S nei quali il piano tangente risultaperfettamente orizzontale e si ricavano risolvendo il sistema di equazioni algebriche nonlineari: '
)
*3x2 + 6xy ! 2y2 + 2y = 0
3x2 ! 4xy + 3y2 + 2x = 0 .
Benche la soluzione di questo sistema non sia a"atto semplice, si puo pero notare che:(i) una soluzione ovvia si ha per (x, y) = (0, 0), che quindi e un punto critico di f ;
(ii) in prossimita di (x, y) = (0, 0) esiste un secondo punto critico di f , del quale e possibilefornire una stima numerica — usando ad esempio il comando fsolve di MapleTM —
(x, y) = (!0.4409928956,!0.7252188077) .
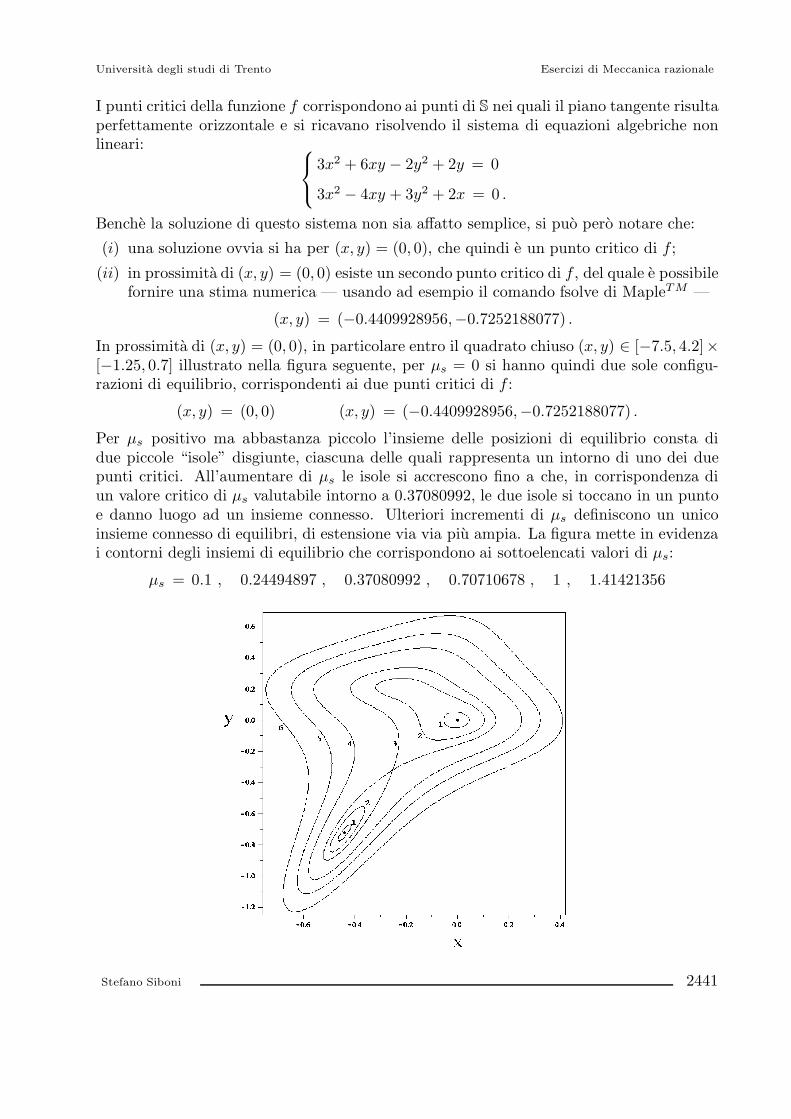
In prossimita di (x, y) = (0, 0), in particolare entro il quadrato chiuso (x, y) " [!7.5, 4.2]-[!1.25, 0.7] illustrato nella figura seguente, per µs = 0 si hanno quindi due sole configu-razioni di equilibrio, corrispondenti ai due punti critici di f :
(x, y) = (0, 0) (x, y) = (!0.4409928956,!0.7252188077) .
Per µs positivo ma abbastanza piccolo l’insieme delle posizioni di equilibrio consta didue piccole “isole” disgiunte, ciascuna delle quali rappresenta un intorno di uno dei duepunti critici. All’aumentare di µs le isole si accrescono fino a che, in corrispondenza diun valore critico di µs valutabile intorno a 0.37080992, le due isole si toccano in un puntoe danno luogo ad un insieme connesso. Ulteriori incrementi di µs definiscono un unicoinsieme connesso di equilibri, di estensione via via piu ampia. La figura mette in evidenzai contorni degli insiemi di equilibrio che corrispondono ai sottoelencati valori di µs:
µs = 0.1 , 0.24494897 , 0.37080992 , 0.70710678 , 1 , 1.41421356
Stefano Siboni 2441

Universita degli studi di Trento Esercizi di Meccanica razionale
e associati, nell’ordine, ai seguenti valori di µ2s :
µ2s = 0.01 , 0.06 , 0.1375 , 0.5 , 1 , 2 .
I contorni sono marcati con numeri interi da 1 a 6, in ordine crescente di µs. Ciascuninsieme di equilibrio e dunque incluso nei precedenti.
(c) Equilibri nel caso di µs costante e f(x, y) polinomio di secondo gradoNel caso che S sia il grafico di un polinomio di secondo grado delle variabili indipendentix e y, la funzione f(x, y) puo esprimersi nella forma
f(x, y) = ax2 + by2 + 2cxy + 2dx + 2ey
con a, b, c, d, e costanti reali arbitrarie, delle quali a, b, c non simultaneamente nulle. Lecomponenti del gradiente di f sono ovviamente
.f
.x(x, y) = 2ax + 2cy + 2d
.f
.y(x, y) = 2cx + 2by + 2e
per cui $.f
.x
%2+$.f
.y
%2= 4(ax + cy + d)2 + 4(cx + by + e)2
e la condizione di equilibrio (472.5) diventa
(ax + cy + d)2 + (cx + by + e)2 ' µ2s
4(472.6)
con µs costante. Per questo tipo di superficie — e µs costante — e possibile individuare unacaratterizzazione completa degli insiemi di equilibrio. A questo scopo conviene distingueretre diversi casi.
(i) Caso ab ! c2 &= 0Se ab!c2 &= 0 la funzione f ammette uno ed un solo punto critico, identificabile con l’unicasoluzione del sistema lineare: D
ax + cy + d = 0cx + by + e = 0
(472.7)
ossia con
x =1
ab ! c2
!!!!!d c!e b
!!!! =ce ! bd
ab ! c2y =
1ab ! c2
!!!!a !dc !e
!!!! =cd! ae
ab ! c2
in corrispondenza della quale il primo membro della (472.6) si annulla e la disequazionee certamente soddisfatta. Per µs = 0 detto punto critico rappresenta l’unica posizione diequilibrio del sistema. Nel caso che l’attrito radente non sia trascurabile — µs > 0 — lacondizione di equilibrio (472.6) individua un dominio ellittico chiuso del piano (x, y) " R2.Per convincersene, basta introdurre il cambiamento di varibili (x, y) " R2 * (+, 0) " R2
Stefano Siboni 2442

Universita degli studi di Trento Esercizi di Meccanica razionale
definito dalla trasformazione a!ne — composizione fra una trasformazione lineare ed unatraslazione —
+ = ax + cy + d 0 = cx + by + e (472.8)
che e certamente invertibile in tutto R2 grazie alla condizione ab ! c2 &= 0. In virtu diquesto cambiamento di coordinate la condizione (472.6) si riduce a
+2 + 02 ' µ2s/4
ed individua tutti e soli i punti (+, 0) del disco circolare di centro (+, 0) = (0, 0) e e raggioµs/2. L’inversa della trasformazione (472.8) mappa tale disco circolare in dominio ellitticochiuso. In e"etti la parte quadratica del polinomio a primo membro in (472.6) risulta
a2x2 + c2y2 + 2acxy + c2x2 + b2y2 + 2cbxy = (a2 + c2)x2 + (b2 + c2)y2 + 2(a + b)cxy
e puo esprimersi nella forma matriciale
(x y)
Fa2 + c2 (a + b)c(a + b)c b2 + c2
G+xy
,= (x y)A
+xy
,
dove la matrice di rappresentazione A e reale, simmetrica e definita positiva, avendo de-terminante e traccia positivi
detA = (a2 + c2)(b2 + c2) ! (a + b)2c2 = a2b2 + c4 ! 2abc2 = (ab ! c2)2 > 0
trA = a2 + c2 + b2 + c2 = a2 + b2 + 2c2 > 0
per via della condizione ab! c2 &= 0. I due autovalori positivi di A assicurano che l’insiemedi equilibrio sia una regione ellittica chiusa, in quanto tutte le curve di livello f(x, y) =costante > 0 sono delle ellissi.A titolo di esempio si consideri il caso di
f(x, y) = !2x2 + 3y2 + 2xy
per il quale risulta evidentemente:
a = !2 b = 3 c = 1
ed e dunque soddisfatta la condizione ab!c2 = (!2)·3!12 = !7 &= 0. La forma quadraticaf(x, y) ha autovalori di segno opposto, causa il determinante negativo della relativa matricedi rappresentazione. La superficie vincolare e allora il paraboloide iperbolico di seguito
Stefano Siboni 2443
Universita degli studi di Trento Esercizi di Meccanica razionale
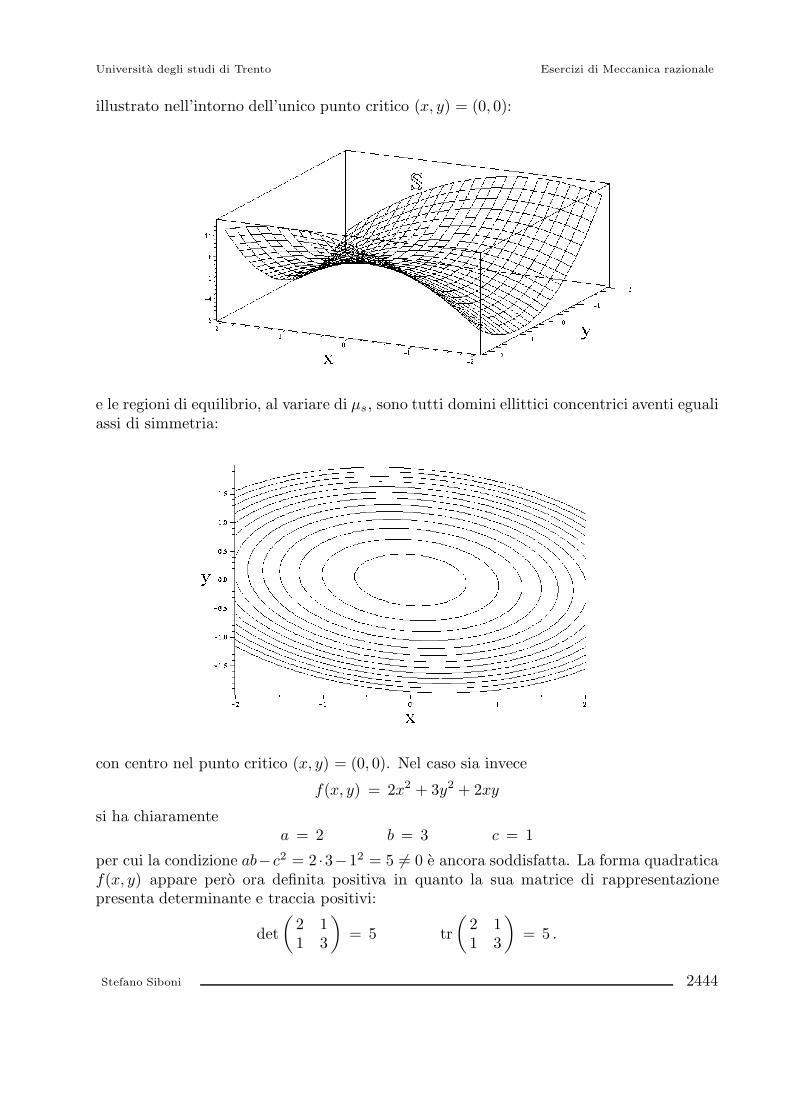
illustrato nell’intorno dell’unico punto critico (x, y) = (0, 0):
e le regioni di equilibrio, al variare di µs, sono tutti domini ellittici concentrici aventi egualiassi di simmetria:
con centro nel punto critico (x, y) = (0, 0). Nel caso sia invece
f(x, y) = 2x2 + 3y2 + 2xy
si ha chiaramentea = 2 b = 3 c = 1
per cui la condizione ab!c2 = 2 ·3!12 = 5 &= 0 e ancora soddisfatta. La forma quadraticaf(x, y) appare pero ora definita positiva in quanto la sua matrice di rappresentazionepresenta determinante e traccia positivi:
det+
2 11 3
,= 5 tr
+2 11 3
,= 5 .
Stefano Siboni 2444
Universita degli studi di Trento Esercizi di Meccanica razionale
La superficie S e pertanto un paraboloide ellittico, il cui andamento in prossimita dell’unicopunto critico (x, y) = (0, 0) viene descritto nella figura seguente:
Anche in questa circostanza, al variare di µs, gli insiemi di equilibrio sono regioni ellittichechiuse di comune centro (x, y) = (0, 0) e con gli assi di simmetria coincidenti — vedi figura.
(ii) Caso ab ! c2 = 0 e ae ! cd = 0Qualora i coe!cienti della superficie vincolare soddisfino le condizioni ab!c2 = 0 e ae!cd =0 le equazioni del sistema (472.7) sono linearmente dipendenti, avendosi ad esempio:(1)
a = ,c c = ,b d = ,e
per uno scalare , appropriato. Il sistema ammette dunque una infinita di soluzioni, cor-rispondenti ai punti della retta
cx + by + e = 0
(1) il caso in cui risulti, reciprocamente, c=$a, b=$c, e=$d si tratta in modo del tutto analogo
Stefano Siboni 2445

Universita degli studi di Trento Esercizi di Meccanica razionale
che definiscono altrettanti punti critici di f . Per µs = 0 questi punti sono i soli equilibridel sistema. Qualora si abbia µs > 0, basta osservare che
(ax + cy + d)2 + (cx + by + e)2 =
=(,cx + ,by + d)2 + (cx + by + e)2 =
= [,(cx + by) + d]2 + (cx + by + e)2 =
=,2(cx + by)2 + d2 + 2,d(cx + by) + (cx + by)2 + e2 + 2e(cx + by) =
= (,2 + 1)(cx + by)2 + 2(,d + e)(cx + by) + d2 + e2
e la condizione di equilibrio (472.6) assume percio la forma
(,2 + 1)(cx + by)2 + 2(,d + e)(cx + by) + d2 + e2 ' µ2s/4 ,
certamente soddisfatta lungo la retta cx + by = !e dei punti critici di f , dove il primomembro si annulla. Quella ottenuta e una disequazione di secondo grado nella variabileausiliaria
X = cx + by
e puo esprimersi come
(,2 + 1)X 2 + 2(,d + e)X + d2 + e2 ! µ2s/4 ' 0
con il polinomio a primo membro che ammette due radici reali distinte:
X± =!(,d + e) ±
$,2 + 1µs/2
,2 + 1
poiche il relativo discriminante risulta strettamente positivo:
% = 4(,d + e)2 ! 4(,2 + 1)(d2 + e2 ! µ2s/4) =
= 47(,d + e)2 ! (,2 + 1)(d2 + e2 ! µ2
s/4)8
=
= 47,2d2 + e2 + 2,de ! ,2d2 ! ,2e2 ! d2 ! e2 + (,2 + 1)µ2
s/48
=
= 472,de ! ,2e2 ! d2 + (,2 + 1)µ2
s/48
=
= 47!(,e ! d)2 + (,2 + 1)µ2
s/48
=
= 47(,2 + 1)µ2
s/48.
La disequazione di equilibrio e dunque soddisfatta se e soltanto se
X! ' X ' X+
e caratterizza le posizioni di equilibrio come tutte e sole quelle che appartengono allastriscia
X! ' cx + by ' X+ ,
Stefano Siboni 2446

Universita degli studi di Trento Esercizi di Meccanica razionale
contenente la retta cx + by + e = 0 e a questa parallela.Un caso di questo tipo ricorre per
f(x, y) = 4x2 + y2 + 4xy (472.9)
dal momento che i coe!cienti a = 4, b = 1, c = 2, d = 0, e = 0 verificano le relazioni:
ab ! c2 = 4 · 1 ! 22 = 0 ae ! cd = 4 · 0 ! 2 · 0 = 0 .
La forma quadratica (472.9) ha un autovalore nullo e uno positivo, per cui la superficievincolare e il cilindro parabolico, di generatrice parallela al piano Oxy, evidenziato con ilreticolo nella figura seguente:
come peraltro evidente dall’identita
f(x, y) = 4x2 + y2 + 4xy = (2x + y)2 .
I punti critici della f sono tutti e soli quelli della retta di equazione
2x + y = 0 (472.10)
in corrispondenza dei quali si ha equilibrio anche nel caso di superficie liscia. Al cresceredi µs > 0 le regioni di equilibrio sono delle strisce chiuse delimitate da rette parallele a(472.10):
{(x, y) " R2 : [4(2x + y)]2 + [2(2x + y)]2 ' µ2s}
ossia H(x, y) " R2 : (2x + y)2 ' µ2
s
20
I
e quindi H(x, y) " R2 : ! µs$
20' 2x + y ' µs$
20
I,
Stefano Siboni 2447
Universita degli studi di Trento Esercizi di Meccanica razionale
come la figura sottoriportata mette in evidenza:
La linea in neretto e la retta (472.10), l’insieme degli equilibri per µs = 0.
(iii) Caso ab ! c2 = 0 ma ae ! cd &= 0Se infine i coe!cienti della quadrica soddisfano ab ! c2 = 0 e ae ! cd &= 0, si ha che ivettori (a, c) e (c, b) sono linearmente dipendenti, mentre (c, b) e (d, e) risultano linearmenteindipendenti. Per un , opportuno si avra percio
a = ,c c = ,b d &= ,e .
Nella fattispecie il sistema (472.7) non ammette alcuna soluzione, in modo che la funzionef non presenta alcun punto critico. D’altra parte, posto come prima cx + by = X , lacondizione di equilibrio assume ancora la forma precedente:
(,2 + 1)X 2 + 2(,d + e)X + d2 + e2 ! µ2s/4 ' 0 ,
con il polinomio quadratico a primo membro che si annulla nei punti
X1, X2 =!(,d + e) ±
5!(,e ! d)2 + (,2 + 1)µ2
s/4,2 + 1
purche il coe!ciente di attrito statico sia su!cientemente grande:
µ2s ( 4(,e ! d)2
,2 + 1.
In tal caso l’insieme di equilibrio va identificato con la striscia
X1 ' cx + by ' X2 .
Stefano Siboni 2448

Universita degli studi di Trento Esercizi di Meccanica razionale
A titolo di esempio, le condizioni qui esaminate ricorrono per
f(x, y) = 4x2 + y2 + 4xy + 2x
in quanto i coe!cienti a = 4, b = 1, c = 2, d = 1, e = 0 soddisfano i requisiti prescritti:
ab ! c2 = 4 · 1 ! 22 = 0 ae ! cd = 4 · 0 ! 2 · 1 = !2 &= 0 .
La parte quadratica 4x2 + y2 + 4xy della funzione f(x, y) e come prima semidefinita nondefinita positiva, ma nella fattispecie non esiste alcun punto critico e la superficie S hal’aspetto di un cilindro parabolico con la generatrice non parallela al piano Oxy — vedifigura.
Per un generico µs ( 0 la regione di equilibrio e individuata dalla diseguaglianza
(4x + 2y + 1)2 + (y + 2x)2 ' µ2s
4
che posto + = y + 2x assume la forma
(2+ + 1)2 + +2 ' µ2s
4
e dopo semplici manipolazioni algebriche si riduce a
5+2 + 4+ + 1 ! µ2s
4' 0 .
La disequazione ammette soluzioni reali se e solo se il discriminante del polinomio quadra-tico a primo membro ha segno non negativo:
% = 16 ! 20$1 ! µ2
s
4
%= !4 + 5µ2
s ( 0
Stefano Siboni 2449

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia per µs ( 2/$
5. In tal caso le soluzioni in + sono i valori ricompresi nell’intervallo
!4!5
5µ2s ! 4
10' + ' !4 +
55µ2
s ! 410
cui corrisponde la striscia di equilibri
D!4 !
55µ2
s ! 410
' y + 2x '!4 +
55µ2
s ! 410
E
nel piano Oxy. Trova cosı conferma l’a"ermazione che le regioni di equilibrio presentanoin Oxy la stessa struttura del precedente caso (ii), pur risultando definite soltanto perµs ( 2/
$5. La figura mostra le regioni di equilibrio per valori crescenti di µs, a partire da
µs = 2/$
5 — retta in neretto —
L’esistenza di un µs critico per il sussistere di equilibri e imputabile alla pendenza nonnulla della retta generatrice del cilindro parabolico S.
Esercizio 473. Oscillatore armonico smorzatoUn punto materiale P di massa unitaria e vincolato a scorrere senza attrito lungo l’asseorizzontale Ox = Oe1 di una terna inerziale, soggetto a una resistenza viscosa con costantedi frizione 2. Una molla di costante elastica k collega P all’origine O. Determinare:
(a) le equazioni pure del moto del punto e i valori di k per i quali si hanno moti oscillatorismorzati;
(b) posizione e velocita di P all’istante t = "/2 qualora si abbia k = 5 e P (0) ! O = 3e1,P (0) = !2e1 all’istante t = 0.
Stefano Siboni 2450

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Equazioni pure del moto e regime sottocriticoL’equazione pura del moto, ottenuta proiettando la seconda legge della dinamica lungol’asse liscio Ox, e una equazione di"erenziale lineare e omogenea del secondo ordine acoe!cienti costanti:
mx + (x + kx = 0
e con la sostituzione m = 1, ( = 2 si riduce a
x + 2x + kx = 0 . (473.1)
L’equazione caratteristica associata a (473.1) si scrive
,2 + 2, + k = 0
ed ammette radici complesse coniugate (con parte reale negativa), corrispondenti al regimesottocritico od oscillatorio smorzato del sistema, se e soltanto se il discriminante dell’equa-zione risulta di segno negativo:
% = 4 ! 4k < 0
ossia per k > 1.
(b) Posizione e velocita istantanea di P all’istante t = "/2Per k = 5 l’equazione caratteristica del sistema assume la forma
,2 + 2, + 5 = 0
ed ammette le radici
, =!2±
$4 ! 4 · 52
=!2 ± 4i
2= !1 ± 2i
cui corrisponde la soluzione generale
x(t) = c1e!t cos(2t) + c2e
!t sin(2t) % t " R (473.2)
nella quale le costanti reali arbitrarie c1 e c2 vanno determinate imponendo le condizioniiniziali assegnate. Nella fattispecie, all’istante t = 0 deve aversi:
x(0) = 3 x(0) = !2 .
La derivata di (473.2) risulta
x(t) = c1e!t[! cos(2t) ! 2 sin(2t)] + c2e
!t[! sin(2t) + 2 cos(2t)] % t " R
per cui le condizioni iniziali richiedono che si abbia
3 = x(0) = c1 ! 2 = x(0) = !c1 + 2c2
Stefano Siboni 2451

Universita degli studi di Trento Esercizi di Meccanica razionale
e le costanti risultano percio
c1 = 3 c2 =12
.
Si perviene cosı alla soluzione del problema di Cauchy proposto:
x(t) =-3 cos(2t) +
12
sin(2t).e!t % t " R
cui corrisponde la funzione derivata prima
x(t) = 3e!t[! cos(2t) ! 2 sin(2t)] +12e!t[! sin(2t) + 2 cos(2t)] % t " R .
Per t = "/2 si ha ovviamente
x("/2) = !3 e!#/2 x("/2) = 2 e!#/2
e la posizione e velocita di P sono pertanto:
P ("/2) ! O = !3 e!#/2 e1 P ("/2) = 2 e!#/2 e1 .
Esercizio 474. Massa e baricentro di un sistema materialeNel piano Oxy di una terna Oxyz la regione delimitata dalle curve y = x2/a, y = !x2/a,x = a e occupata da una piastra P di densita:
&(x, y) =µ
a4x|y| ,
dove µ e una costante con le dimensioni di una massa. Lungo il segmento !a ' z ' adell’asse Oz e inoltre collocata una sbarra AB di densita ,(z) = µ(z + a)/a2 .
Stefano Siboni 2452

Universita degli studi di Trento Esercizi di Meccanica razionale
Si chiede di determinare:
(a) la massa del sistema;(b) i baricentri di piastra e asta;(c) il baricentro del sistema.
Soluzione(a) Massa del sistemaPer determinare la massa del sistema occorre calcolare le masse della piastra e della sbarrae quindi sommarle.
Massa della piastraLa massa della piastra si ricava integrando la densita &(x, y) sulla regione delimitata dallecurve y = x2/a, y = !x2/a e x = a. Si ha cosı:
mP =a6
0
dx
x2/a6
!x2/a
dyµ
a4x|y| =
µ
a4
a6
0
dx x
x2/a6
!x2/a
dy |y| =µ
a4
a6
0
dxx 2
x2/a6
0
dy y =
=2µ
a4
a6
0
dxx
-y2
2
.x2/a
y=0
=µ
a4
a6
0
dxxx4
a2=
µ
a6
a6
0
x5dx =µ
a6
a6
6=
µ
6.
Massa della sbarraLa massa della sbarra e data dall’integrale curvilineo:
mAB
=a6
!a
dzµ
a2(z + a) =
µ
a2
-(z + a)2
2
.a
!a
=µ
a2
12
4a2 = 2µ .
Massa del sistemaLa somma delle masse parziali calcolate conduce alla massa del sistema:
m = mP + mAB
=µ
6+ 2µ =
136
µ .
(b) Baricentri di piastra e sbarraBaricentro della piastraIl baricentro GP della piastra deve appartenere al piano di giacitura Oxy di questa. Valeinoltre:
&(x, y) =µ
a4x|y| =
µ
a4x|! y| = &(x,!y) % (x, y) " P ,
per cui l’asse Ox e un asse di simmetria di P e il baricentro deve essere individuato da unvettore posizione della forma:
GP ! O = xP e1 .
Stefano Siboni 2453

Universita degli studi di Trento Esercizi di Meccanica razionale
L’ascissa del baricentro viene calcolata secondo la definizione
xP =1
mP
6
P
x& dxdy =6µ
a6
0
dx
x2/a6
!x2/a
dy xµ
a4x|y| =
6a4
a6
0
dxx22
x2/a6
0
dy y =
=6a4
a6
0
dxx2 2-y2
2
.x2/a
0
=6a4
a6
0
x2 x4
a2dx =
6a6
-x7
7
.a
0
=67a
in modo che risultaGP !O =
67a e1 .
Baricentro della sbarraPer il teorema dell’inviluppo convesso, il baricentro G
ABdella sbarra deve collocarsi lungo
il segmento !a ' z ' a dell’asse Oz:
GAB
! O = zAB
e3 .
La coordinata z del baricentro si ottiene dall’espressione
zAB
=1
mAB
6
AB
z , dz =12µ
a6
!a
zµ
a2(z + a)dz =
=1
2a2
a6
!a
(z2 + az)dz =1
2a2
-z3
3+ a
z2
2
.a
!a
=1
2a2
23a3 =
13a
e quindi:
GAB
! O =13a e3 .
(c) Baricentro del sistemaNoti che siano le masse e i baricentri di piastra e sbarra, e facile determinare il baricentroG del sistema per mezzo del teorema distributivo:
G !O =mP(GP !O) + m
AB(G
AB! O)
m=
=6
13µ
$µ
667a e1 + 2µ
13a e3
%=
613
$17a e1 +
23a e3
%=
691
a e1 +413
a e3 .
Osservazione. Inviluppo convesso del sistemaE facile convincersi che l’inviluppo convesso del sistema e il tetraedro chiuso di vertici:
A(0, 0,!a) B(0, 0, a) P1(a, a, 0) P2(a,!a, 0) .
Stefano Siboni 2454

Universita degli studi di Trento Esercizi di Meccanica razionale
evidenziato con i segmenti in grassetto nella figura seguente:
Basta osservare preliminarmente che i quattro punti A, B, P1 e P2 sono tutti punti delsistema e quindi devono essere contenuti nell’inviluppo convesso del sistema. D’altra parte,il semispazio chiuso contenente P2 che ha come frontiera il piano condotto per ABP1 includecompletamente il sistema. Lo stesso accade per:
. il semispazio chiuso contenente P1 e avente come frontiera il piano condotto per ABP2;
. il semispazio chiuso contenente A e che ha il piano condotto per BP1P2 come frontiera;
. il semispazio chiuso contenente B e la cui frontiera e il piano condotto per AP1P2.
L’intersezione di questi quattro semispazi chiusi e precisamente il tetraedro ABP1P2, comea"ermato. Il baricentro G appartiene al tetraedro. Per provarlo si puo verificare che ilvettore posizione G!O e esprimibile come combinazione lineare convessa dei vettori A!O,B ! O, P1 ! O e P2 ! O, ossia nella forma
G !O = w1(A !O) + w2(B ! O) + w3(P1 ! O) + w4(P2 ! O)
con i coe!cienti wi tutti non negativi e di somma unitaria:
wi ( 0 % i = 1, 2, 3, 4 ,49
i=1
wi = 1 .
I coe!cienti devono infatti soddisfare l’equazione vettoriale
w1(!a e3) + w2(+a e3) + w3(a e1 + a e2) + w4(a e1 ! a e2) =691
a e1 +413
a e3
che unitamente alla condizione sulla loro somma conduce al sistema lineare non omogeneo
Stefano Siboni 2455

Universita degli studi di Trento Esercizi di Meccanica razionale
di quattro equazioni in quattro variabili'((((((()
(((((((*
w3 + w4 =691
w3 ! w4 = 0
!w1 + w2 =413
w1 + w2 + w3 + w4 = 1 .
Dalle prime due equazioni si ottiene immediatamente:
w3 = w4 =12
691
=391
,
in modo che le ultime due si riducono a'()
(*
!w1 + w2 =413
w1 + w2 = 1 ! 691
=8591
e porgono infine:
w1 =12
$8591
! 413
%=
57182
, w2 =12
$8591
+413
%=
113182
.
I coe!cienti calcolati sono tutti positivi e hanno somma 1, come e immediato verificare.La prova e completa.
Esercizio 475. Asse centrale di un sistema di vettori applicatiIn una terna cartesiana ortogonale destra Oe1e2e3 di E3 si considera il sistema S dei vettori*v1 = !e1 + 2e2, *v2 = 2e1 ! 3e3, *v3 = !e1 + e2 + e3, applicati rispettivamente nei puntiP1(1, 2, 0), P2(!1, 0, 1) e P3(!2, 1, 2). Determinare di S:
(a) l’equazione parametrica dell’asse centrale, se definito;(b) il momento rispetto all’asse a di equazione x = 3$ + 1, y = 4$ , z = 0, orientato
secondo le $ " R crescenti.
Soluzione(a) Asse centraleL’esistenza dell’asse centrale e assicurata dal fatto che il risultante del sistema di vettoriapplicati e non nullo:
*R =39
i=1
*vi = (!e1 + 2e2) + (2e1 ! 3e3) + (!e1 + e2 + e3) = 3 e2 ! 2 e3 &= 0 .
Stefano Siboni 2456

Universita degli studi di Trento Esercizi di Meccanica razionale
Il momento risultante del sistema rispetto all’origine O si scrive invece
*MO =39
i=1
(Pi ! O) # *vi =
= (e1 + 2 e2) # (!e1 + 2e2)++ (!e1 + e3) # (2 e1 ! 3 e3)++ (!2 e1 + e2 + 2 e3) # (!e1 + e2 + e3) =
=
!!!!!!
e1 e2 e3
1 2 0!1 2 0
!!!!!!+
!!!!!!
e1 e2 e3
!1 0 12 0 !3
!!!!!!+
!!!!!!
e1 e2 e3
!2 1 2!1 1 1
!!!!!!=
= 4 e3 + (!e2) + (!e1 ! e3) = !e1 ! e2 + 3 e3
per cui si ottiene
*R # *MO = (3 e2 ! 2 e3) # (!e1 ! e2 + 3 e3) =
!!!!!!
e1 e2 e3
0 3 !2!1 !1 3
!!!!!!= 7 e1 + 2 e2 + 3 e3 .
L’equazione parametrica dell’asse centrale e quindi data da
P !O =1
|*R|2*R # *MO + '*R =
7 e1 + 2 e2 + 3 e3
13+ '(3 e2 ! 2 e3) %' " R
e separando le relative componenti scalari diventa:
x =713
y =213
+ 3' z =313
! 2' %' " R . (475.1)
Verifica del risultatoCome verifica del risultato ottenuto andiamo a calcolare il momento risultante di S rispettoad un punto assegnato dell’asse centrale. Un punto cosi"atto si determina fissando unvalore particolare di ' nell’equazione parametrica (475.1), ad esempio ' = 0. Si ottienecosı il punto B di vettore posizione:
B !O =7 e1 + 2 e2 + 3 e3
13
rispetto al quale il momento risultante del sistema vale:
*MB = *MO + (O ! B) # *R = *MO + *R # (B ! O) =
= !e1 ! e2 + 3 e3 + (3 e2 ! 2 e3) #7 e1 + 2 e2 + 3 e3
13=
= !e1 ! e2 + 3 e3 +113
!!!!!!
e1 e2 e3
0 3 !27 2 3
!!!!!!=
= !e1 ! e2 + 3 e3 +13 e1 ! 14 e2 ! 21 e3
13= !27
13e2 +
1813
e3 = ! 913
(3 e2 ! 2 e3)
Stefano Siboni 2457

Universita degli studi di Trento Esercizi di Meccanica razionale
ed e chiaramente parallelo al risultante *R = 3 e2 ! 2 e3 del sistema di vettori applicati.
(b) Momento assialeIl momento assiale di S va calcolato rispetto alla retta a di parametrizzazione
x = 3$ + 1 y = 4$ z = 0 % $ " R ,
orientata nel senso delle $ crescenti. Un punto A " a si ricava facilmente ponendo $ = 0:
A ! O = e1 .
Rispetto a questo punto il momento risultante del sistema si calcola convenientemente conil teorema di cambiamento del polo, essendo gia noto *MO :
*MA = *MO + (O ! A) # *R = *MO + *R # (A ! O) == !e1 ! e2 + 3 e3 + (3 e2 ! 2 e3) # e1 == !e1 ! e2 + 3 e3 + (!3 e3 ! 2 e2) = !e1 ! 3 e2 .
Il versore direttore della retta orientata a e poi dato dalla derivata della parametrizzazionerispetto al parametro $ , debitamente normalizzata:
n =3 e1 + 4 e2
|3 e1 + 4 e2|=
3 e1 + 4 e2
5=
35
e1 +45
e2 .
Ne deriva che il momento assiale di S rispetto ad a vale, per definizione,
Ia = *MA · n = (!e1 ! 3 e2) ·$3
5e1 +
45
e2
%= !3
5! 12
5= !3 .
Esercizio 476. Punto vincolato a una curva fissa e lisciaUna terna inerziale Oxyz ha l’asse verticale Oy diretto verso l’alto. Un punto materialepesante P di massa m scorre nel piano Oxy lungo la curva di equazione y = x3 ! 3x2,x " R. Determinare del sistema:
(a) le equazioni pure del moto, nell’ipotesi che la curva sia liscia;(b) gli equilibri, sempre nell’ipotesi di curva liscia;(c) gli equilibri qualora la curva avesse coe!ciente di attrito radente statico µs = 0.2.
Soluzione(a) Equazioni pure del moto nel caso di curva lisciaLa curva vincolare e individuata dalla parametrizzazione regolare
P (x) ! O = x e1 + (x3 ! 3x2) e2 , x " R ,
Stefano Siboni 2458

Universita degli studi di Trento Esercizi di Meccanica razionale
con le derivate prima e seconda:
P "(x) = e1 + (3x2 ! 6x) e2 P ""(x) = 6(x ! 1) e2 . (476.1)
Lungo un generico moto possibile del sistema, descritto da una appropriata funzione x(t)di classe C2 in un intervallo di t, la velocita e l’accelerazione istantanea del punto assumonola forma
P = P "(x) x
P = P "(x) x + P ""(x) x2
in modo che l’equazione del moto diventa:
mP = !mg e2 + *$ , (476.2)
in termini della reazione vincolare *$ esercitata dalla curva vincolare sul punto P . L’equa-zione pura del moto si determina proiettando la (476.2), in ogni suo punto, lungo la di-rezione tangente P "(x). Si ha cosı, grazie all’ipotesi di curva liscia,
mP · P "(x) = !mg e2 · P "(x)
e quindim[P "(x)]2x + mP "(x) · P ""(x)x2 = !mg e2 · P "(x) .
Basta poi sostituire le espressioni (476.1) per ottenere:
m[1 + 9x2(x ! 2)2]x + m3x(x ! 2) 6(x ! 1) x2 = !mg3x(x ! 2)
ossia
m[1 + 9x2(x ! 2)2]x + 18mx(x ! 1)(x ! 2) x2 = !3mgx(x ! 2) , (476.3)
che per x " R costituisce l’equazione del moto richiesta.
(b) Posizioni di equilibrio nell’ipotesi di curva lisciaNel caso che la curva si possa considerare liscia, l’equazione pura del moto (476.3) consentedi determinare tutte le configurazioni di equilibrio del sistema sotto forma di soluzionistatiche — costanti. Si ha dunque la condizione di equilibrio:
0 = !3mgx(x ! 2)
dalla quale segue che gli equilibri del sistema sono tutte e sole le configurazioni corrispon-denti alle ascisse:
x = 0 x = 2
vale a direP (0) ! O = 0 P (2) ! O = 2 e1 ! 4 e2 .
Stefano Siboni 2459

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Equilibri nell’ipotesi di curva con attritoIl punto materiale e vincolato ad una curva che rappresenta il grafico di una funzionef(x) = x3 ! 3x2, in un piano cartesiano Oxy che vede l’asse Oy diretto verticalmenteverso l’alto. Poiche il punto risulta soggetto esclusivamente al proprio peso, la condizionedi equilibrio su una curva con coe!ciente di attrito radente statico µs = 0.2 e data dalladiseguaglianza:
|f "(x)| ' µs
ossia|3x2 ! 6x| ' 0.2
che equivale alla doppia disequazione:
!0.2 ' 3x2 ! 6x ' 0.2
e quindi al sistema di disequazioni del secondo ordine:')
*0 ' 3x2 ! 6x + 0.2
3x2 ! 6x ! 0.2 ' 0 .(476.4)
Per risolvere la prima disequazione e su!ciente determinare le radici del polinomio quadra-tico a secondo membro:
3x2 ! 6x + 0.2 = 0
che valgono:
x =6 ±
$36! 4 · 3 · 0.2
6=
6 ±$
36 ! 2.46
=6 ±
$33.6
6
per cui lo stesso polinomio si fattorizza nella forma
3x2 ! 6x + 0.2 = 3$x ! 6 +
$33.6
6
%$x ! 6 !
$33.6
6
%
dalla quale si deduce che le soluzioni della disequazione si hanno per
x ' 6 !$
33.66
/ 0.033908
e per
x ( 6 +$
33.66
/ 1.9660918 .
Lo studio della seconda disequazione (476.4) richiede di calcolare le radici del polinomio aprimo membro:
3x2 ! 6x ! 0.2 = 0 ,
Stefano Siboni 2460

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
x =6 ±
$36 + 4 · 3 · 0.2
6=
6 ±$
38.46
,
e di scomporre il polinomio stesso in un prodotto di binomi di primo grado:
3x2 ! 6x ! 0.2 = 3$x ! 6 !
$38.4
6
%$x ! 6 +
$38.4
6
%
in modo che la disequazione risulta soddisfatta soltanto per
6 !$
38.46
' x ' 6 +$
38.46
,
ovvero approssimativamente per
!0.0327955 ' x ' 2.0327956 .
Le configurazioni di equilibrio del sistema sono percio individuate da tutte e sole le ascissericomprese negli intervalli:
6 !$
38.46
' x ' 6 !$
33.66
e6 +
$33.6
6' x ' 6 +
$38.4
6
che numericamente si approssimano con
!0.0327955 ' x ' 0.033908 e 1.9660928 ' x ' 2.0327956 .
Si osservi che il primo intervallo costituisce un intorno dell’equilibrio x = 1, calcolatonel caso di curva liscia. Analogamente, il secondo intervallo di equilibrio rappresenta unintorno di x = 2, l’altra configurazione di equilibrio determinata nell’ipotesi di curva senzaattrito. Entrambi gli intervalli hanno un’ampiezza relativamente modesta, dato il valorepiuttosto ridotto del coe!ciente di attrito radente statico µs.
Esercizio 477. Matrice e momento d’inerziaUna lamina quadrata L, di lato a, si colloca nel piano Oxy di una terna Oxyz, con duelati lungo gli assi (vedi figura). La sua densita e data da
&(x, y) = µx2y/a5 % (x, y) " L ,
dove µ > 0 e una massa caratteristica. Un’asta rettilinea OD, di lunghezza a, e postalungo il semiasse Oz positivo e ha densita
,(z) =µ
a$
a
$z % z " [0, a] .
Stefano Siboni 2461

Universita degli studi di Trento Esercizi di Meccanica razionale
Determinare del sistema:
(a) la matrice d’inerzia in Oxyz;
(b) il momento d’inerzia rispetto all’asse OB.
Soluzione(a) Matrice d’inerzia in Oxyz
La matrice d’inerzia del sistema rispetto al riferimento Oxyz e data dalla somma dellematrici d’inerzia, relative alla stessa terna, di piastra e asta.
Matrice d’inerzia dell’astaSiccome l’asta e ubicata lungo l’asse Oz, la sua matrice d’inerzia rispetto a Oxyz assumela forma
[LODO ] =
/
1LOD
xx 0 00 LOD
xx 00 0 0
2
4 = µa2
/
12/7 0 00 2/7 00 0 0
2
4
in quanto
LODxx =
a6
0
dz ,(z) z2 =a6
0
dzµ
a3/2z1/2 z2 =
µ
a3/2
a6
0
z5/2dz =
=µ
a3/2
-27z7/2
.a
0
=µ
a3/2
27a7/2 =
27µa2 .
Matrice d’inerzia della laminaLa collocazione della lamina nel piano coordinato Oxyz autorizza ad a"ermare che la
Stefano Siboni 2462

Universita degli studi di Trento Esercizi di Meccanica razionale
relativa matrice d’inerzia in Oxyz sia della forma
[LLO] =
/
1LL
xx LLxy 0
LLxy LL
yy 00 0 LL
xx + LLyy
2
4. (477.1)
I due momenti indipendenti e l’unico prodotto d’inerzia non banale si calcolano ricorrendoalla definizione, per mezzo degli appropriati integrali di superficie. Per il momento relativoall’asse Ox si ha l’espressione:
LLxx =
6
L
y2& dxdy =a6
0
dx
a6
0
dy y2 µ
a5x2y =
µ
a5
a6
0
x2dx
a6
0
y3dy =µ
a5
a3
3a4
4=
112
µa2
mentre quello associato all’asse Oy e dato da:
LLyy =
6
L
x2& dxdy =a6
0
dx
a6
0
dy x2 µ
a5x2y =
µ
a5
a6
0
x4dx
a6
0
y dy =µ
a5
a5
5a2
2=
110
µa2
ed il prodotto d’inerzia residuo vale:
LLxy = !
6
L
xy & dxdy = !a6
0
dx
a6
0
dy xyµ
a5x2y = ! µ
a5
a6
0
x3dx
a6
0
y2dy = ! 112
µa2
in modo che la matrice d’inerzia cercata diventa:
[LLO] = µa2
/
11/12 !1/12 0!1/12 1/10 0
0 0 11/60
2
4. (477.2)
Matrice d’inerzia del sistemaSommando le matrici d’inerzia parziali (477.1) e (477.2) si perviene alla matrice d’inerziain Oxyz dell’intero sistema:
[LO] = [LODO ] + [LL
O] = µa2
/
12/7 0 00 2/7 00 0 0
2
4+ µa2
/
11/12 !1/12 0!1/12 1/10 0
0 0 11/60
2
4 =
= µa2
/
131/84 !1/12 0!1/12 27/70 0
0 0 11/60
2
4.
Stefano Siboni 2463

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Momento d’inerzia rispetto all’asse OBLa retta OB, rispetto alla quale si richiede di calcolare il momento d’inerzia del sistema,passa chiaramente per l’origine ed il suo versore direttore si scrive:
n =B ! O
|B ! O| =a e1 + a e2
|a e1 + a e2|=
a e1 + a e2$2 a
=1$2
e1 +1$2
e2 .
Il momento d’inerzia cercato vale percio:
IOB = IOn = n · LO(n) =$ 1$
21$2
0%
[LO]
/
11/
$2
1/$
20
2
4 =
=12(1 1 0)µa2
/
131/84 !1/12 0!1/12 27/70 0
0 0 11/60
2
4
/
1110
2
4 =
=12µa2
$ 3184
! 112
! 112
+2770
0%/
1110
2
4 =
=12µa2
$3184
! 112
! 112
+2770
%=
12µa2
$1784
+2770
%=
247840
µa2 .
Esercizio 478. Massa e baricentro di un sistema materialeNel piano Oxy di una terna Oxyz la regione compresa fra la curva y = x(a ! x)/a e l’asseOx e occupata da una piastra P di densita &(x, y) = µx/a3 , dove le costanti positive µ e asono una massa e una lunghezza caratteristiche del sistema. Nel semiasse Ox negativo sitrova una sbarra BO di lunghezza a/2 e densita ,(P ) = 3
$2 µ|P !B|1/2/a3/2 %P " BO.
Determinare:
(a) la massa del sistema;(b) i baricentri di piastra e sbarra;(c) il baricentro del sistema, verificandone l’appartenenza all’inviluppo convesso di P0BO.
Stefano Siboni 2464

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Massa del sistemaLa proprieta di additivita consente di esprimere la massa del sistema come somma dellemasse di piastra e sbarra.
Massa della piastra PLa massa della piastra e data dall’integrale della densita areale sulla regione di pianocompresa fra l’asse Ox e la parabola di equazione y = x(a!x)/a. Si deve percio considerarel’integrale doppio:
mP =6
P
& dxdy =a6
0
dx
x(a!x)/a6
0
dyµx
a3=
µ
a3
a6
0
dxx(a ! x)
ax =
=µ
a4
a6
0
(ax2 ! x3)dx =µ
a4
-ax3
3! x4
4
.a
0
=µ
a4
$a4
3! a4
4
%=
µ
12.
Massa della sbarra OBLa sbarra ammette un’ovvia parametrizzazione della forma
P ! O = x e1 , x " [!a/2, 0] ,
mentre per l’estremo B si ha il vettore posizione
B ! O = !a
2e1 .
Ne deriva che
|P ! B| =!!!!$x +
a
2
%e1
!!!! =!!!!x +
a
2
!!!! = x +a
2%x " [!a/2, 0]
per cui la densita di linea della sbarra si riduce a
,(x) = 3$
2µ
a3/2
$x +
a
2
%1/2%x " [!a/2, 0]
e la massa della sbarra risulta determinata dall’integrale ordinario
mBO
=6
BO
, dx =06
!a/2
3$
2µ
a3/2
$x +
a
2
%1/2dx
che il cambiamento di variabile x+(a/2) = + permette di riscrivere nella forma equivalente
mBO
=
a/26
0
3$
2µ
a3/2+1/2d+ = 3
$2
µ
a3/2
-23+3/2
.a/2
0
= 3$
2µ
a3/2
23
a3/2
23/2= µ .
Stefano Siboni 2465

Universita degli studi di Trento Esercizi di Meccanica razionale
Massa del sistemaSommando le masse parziali precedentemente calcolate si ricava la massa del sistema:
m = mP + mBO
=µ
12+ µ =
1312
µ .
(b) Baricentri di piastra e sbarraBaricentro della piastra PIl baricentro GP della piastra P deve collocarsi nel piano di giacitura di questa, Oxy, sicchesi avra
GP ! O = xP e1 + yP e2
con l’ascissa del baricentro determinata da:
xP =1
mP
6
P
x& dxdy =12µ
a6
0
dx
x(a!x)/a6
0
dy xµx
a3=
12a3
a6
0
dxx2
x(a!x)/a6
0
dy =
=12a3
a6
0
dxx2 x(a ! x)a
=12a4
a6
0
(ax3 ! x4)dx =12a4
-ax4
4! x5
5
.a
0
=12a4
a5
20=
35a
mentre l’ordinata si ottiene per mezzo della relazione:
yP =1
mP
6
P
y & dxdy =12µ
a6
0
dx
x(a!x)/a6
0
dy yµx
a3=
12a3
a6
0
dxx
x(a!x)/a6
0
dy y =
=12a3
a6
0
dxx
-y2
2
.x(a!x)/a
y=0
=6a3
a6
0
dxxx2(a ! x)2
a2=
6a5
a6
0
(a2 + x2 ! 2ax)x3dx =
=6a5
-a2 x4
4+
x6
6! 2a
x5
5
.a
0
= 6a$1
4+
16! 2
5
%=
110
a .
Ne deriva cheGP ! O =
35a e1 +
110
a e2 .
Baricentro della sbarra BOIl baricentro G
BOdella sbarra deve collocarsi lungo l’asse di giacitura Ox e dunque espri-
mersi in termini della sola ascissa xBO
:
GBO
! O = xBO
e1 .
Si ha allora
xBO
=1
mBO
6
BO
x, dx =1µ
06
!a/2
x3$
2µ
a3/2
$x +
a
2
%1/2dx
Stefano Siboni 2466

Universita degli studi di Trento Esercizi di Meccanica razionale
e con il cambiamento di variabili x + (a/2) = +:
xBO
=3$
2a3/2
a/26
0
$+ ! a
2
%+1/2d+ =
3$
2a3/2
a/26
0
$+3/2 ! a
2+1/2
%d+ =
=3$
2a3/2
-25+5/2 ! a
223
+3/2
.a/2
0
=3$
2a3/2
-25
a5/2
4$
2! a
3a3/2
2$
2
.=
= 3$
2$ 1
10$
2! 1
6$
2
%a = 3
$ 110
! 16
%a = !1
5a
per cui
GBO
! O = !15
a e1 .
(c) Baricentro del sistema, con verifica dell’appartenenza all’inviluppo convessoNoti che siano masse e baricentri di piastra e sbarra, il baricentro del sistema puo essereindividuato ricorrendo al teorema distributivo:
G !O =1m
7mP(GP ! O) + m
BO(G
BO! O)
8=
1213µ
-µ
12
$35a e1 +
110
a e2
%+ µ
$!1
5a e1
%.
=113
$35
e1 +110
e2 !125
e1
%a =
113
$!9
5e1 +
110
e2
%a = ! 9
65a e1 +
1130
a e2 .
Appartenenza di G all’inviluppo convesso dell’insieme P 0 BOPer ottenere l’inviluppo convesso conv(P0BO) del sistema e su!ciente aggiungere a P0BOla porzione del piano Oxy compresa fra P 0 BO e la retta r passante per B tangente allaparabola ) che delimita P nel primo quadrante del piano cartesiano. Nella figura seguentela regione di piano aggiunta al sistema per generare il relativo inviluppo convesso vieneevidenziata con l’ombreggiatura:
Il baricentro G del sistema si trova chiaramente nel II quadrante, per cui basta verificareche G appartenga al semipiano & di Oxy delimitato dalla retta r e contenente l’origine. Aquesto scopo si determina l’equazione della retta r e quindi la disequazione che rappresentail semipiano & nel piano Oxy.
Stefano Siboni 2467

Universita degli studi di Trento Esercizi di Meccanica razionale
Equazione della retta rLa retta tangente all’arco ) in un generico punto di questo, di ascissa x0 " [0, a], e indi-viduata dall’equazione:
y !$x0 !
x20
a
%=$1 ! 2x0
a
%(x ! x0)
in cui il coe!ciente angolare 1!(2x0/a) e la derivata prima della funzione x(a!x)/a in x0.L’equazione della retta r viene ricavata imponendo il passaggio per il punto B(!a/2, 0)del piano Oxy, ossia
!$x0 !
x20
a
%=$1 ! 2x0
a
%$!a
2! x0
%. (478.1)
Eseguiti i prodotti, l’equazione (478.1) diventa
!x0 +x2
0
a= !a
2! x0 + x0 +
2x20
a
e dopo semplici manipolazioni algebriche si riduce all’equazione di secondo grado
x20 + ax0 !
a2
2= 0
che risolta fornisce le radici:
x0 =!a ±
5a2 ! 4(!a2/2)
2=
!a ±$
3 a
2=
!1±$
32
a .
Di queste, la sola accettabile e
x0 =$
3 ! 12
a " [0, a] ,
mentre l’altra deve essere rigettata in quanto negativa, e dunque estranea all’intervallo[0, a] su cui e parametrizzato l’arco di parabola ). La retta r ha percio l’equazione:
y !$
3 ! 12
a +($
3 ! 1)2
4a =
$1 ! 2
$3 ! 12
%$x !
$3 ! 12
a%
che dopo semplici passaggi algebrici assume la forma compatta
y = (2 !$
3)$x +
a
2
%. (478.2)
Disequazione rappresentativa del semipiano & in OxyLa disequazione che rappresenta il semipiano & si ottiene trasformando l’equazione (478.2)in una disequazione soddisfatta dalle coordinate dell’origine:
y ' (2 !$
3)$x +
a
2
%. (478.3)
Stefano Siboni 2468

Universita degli studi di Trento Esercizi di Meccanica razionale
Verifica che G " &Le coordinate del baricentro in Oxy:
G ! O = ! 965
a e1 +1
130a e2
soddisfano la disequazione (478.3) che definisce &. Vale infatti:
1130
a ' (2 !$
3)$! 9
65a +
a
2
%
ossia1
130' (2 !
$3)
47130
e quindi147
! 2 ' !$
3
per cui$
3 ' 9347
.
Quadrando membro a membro la disequazione si riduce alla forma intera
3 · 472 ' 932
che e chiaramente verificata in quanto 3 ·472 = 6627, mentre 932 = 8649. La verifica e cosıcompleta.
Esercizio 479. Oscillatore armonico smorzatoUn punto materiale Q di massa 3 e vincolato a scorrere senza attrito lungo l’asse orizzontaleOx = Oe1 di una terna inerziale, collegato all’origine O da una molla ideale di costanteelastica k e soggetto a una resistenza viscosa con costante di frizione 2. Determinare:
(a) le equazioni pure del moto di Q e i valori di k corrispondenti al regime di motooscillatorio smorzato;
(b) posizione e velocita di Q all’istante t = " qualora si abbia k = 10/3, Q(0) ! O = 3e1
e Q(0) = e1 per t = 0.
Soluzione(a) Equazioni pure del moto e valori di k per il regime oscillatorio smorzatoL’equazione del moto e quella di un oscillatore armonico smorzato unidimensionale. PostoQ ! O = x e1, dal secondo principio della dinamica si ha infatti:
3x e1 = !kx e1 ! 2x e1
e quindi3x + 2x + kx = 0 , (479.1)
Stefano Siboni 2469

Universita degli studi di Trento Esercizi di Meccanica razionale
essendo m = 3 la massa del punto materiale e ( = 2 la costante di frizione della re-sistenza viscosa. Come noto, il regime oscillatorio smorzato si realizza quando l’equazionecaratteristica del sistema
3,2 + 2, + k = 0
ammette due radici complesse coniugate, condizione che ricorre se e soltanto se il discri-minante dell’equazione ha segno negativo:
% = 22 ! 4 · 3k = 4 ! 12k < 0
ossia per k > 1/3.
(b) Posizione e velocita del punto all’istante t = "Per rispondere al quesito e necessario risolvere il problema di Cauchy relativo all’equazionedi"erenziale del moto e alle condizioni iniziali assegnate, valutando poi la soluzione all’i-stante richiesto t = ". Nel caso sia k = 10/3, l’equazione di"erenziale del moto (479.1)diventa:
3x + 2x +103
x = 0
e la corrispondente equazione caratteristica si scrive
3,2 + 2, +103
= 0
con le radici complesse coniugate:
,± =!2 ±
"4 ! 4 · 3 · 10
36
=!2 ±
$!36
6= !1
3± i .
La soluzione generale dell’equazione — omogenea — e quindi data da
x(t) = c1e!t/3 cos t + c2 e!t/3 sin t % t " R (479.2)
con la derivata:
x(t) = c1e!t/3
$!1
3cos t ! sin t
%+ c2 e!t/3
$!1
3sin t + cos t
%% t " R (479.3)
in termini delle costanti reali arbitrarie c1 e c2, che vanno determinate sulla base dellecondizioni iniziali. All’istante t = 0 viene richiesto che sia
Q(0) ! O = x(0) e1 = 3 e1 Q(0) = x(0) e1 = e1
per cui le condizioni iniziali da considerare sono:
x(0) = 3 x(0) = 1 .
Stefano Siboni 2470

Universita degli studi di Trento Esercizi di Meccanica razionale
Imponendo questi dati iniziali alla soluzione generale (479.2)-(479.3) se ne traggono lerelazioni algebriche:
3 = x(0) = c1 1 = x(0) = !13c1 + c2
dalle quali seguec1 = 3 c2 = 2 .
La soluzione del problema di Cauchy diventa percio:
x(t) = e!t/3(3 cos t + 2 sin t) % t " R
con la derivata:
x(t) = 3e!t/3$!1
3cos t ! sin t
%+ 2 e!t/3
$!1
3sin t + cos t
%% t " R .
Le espressioni precedenti devono essere calcolate all’istante t = " e porgono:
x(") = !3e!#/3 x(") = 3e!#/3 13
+ 2e!#/3(!1) = !e!#/3
in modo che la posizione e la velocita istantanea di Q al tempo t = " risultano:
Q(") !O = !3e!#/3 e1 Q(") = !e!#/3 e1 .
Esercizio 480. Asse centrale di un sistema di vettori applicatiIn una terna cartesiana ortogonale destra Oe1e2e3 di E3 e dato il sistema S dei vettori*v1 = 2e1 + e2 ! e3, *v2 = e1 ! 3e2 + 4e3, *v3 = e1 ! 2e2, applicati rispettivamente nei puntiA1(0, 2,!3), A2(!2, 1, 5) e A3(!3,!1, 2). Determinare di S:
(a) l’equazione parametrica dell’asse centrale;(b) il momento rispetto all’asse a di equazione x = 2+ ! 1, y = !+, z = 3+ + 1, orientato
secondo le + " R crescenti.
SoluzioneIl sistema S si compone dei seguenti vettori applicati:
*v1 = 2 e1 + e2 ! e3 applicato in A1(0, 2,!3)*v2 = e1 ! 3 e2 + 4e3 applicato in A2(!2, 1, 5)*v3 = e1 ! 2 e2 applicato in A3(!3,!1, 2) .
(a) Equazione parametrica dell’asse centraleLa determinazione dell’asse centrale richiede il calcolo del risultante e del momento risul-tante in O di S. Il risultante del sistema e dato da
*R =39
i=1
*vi = (2 e1 + e2 ! e3) + (e1 ! 3 e2 + 4e3) + (e1 ! 2 e2) = 4 e1 ! 4 e2 + 3 e3
Stefano Siboni 2471

Universita degli studi di Trento Esercizi di Meccanica razionale
e risultando diverso da zero assicura l’esistenza dell’asse centrale. Per il momento risultantein O si ha invece l’espressione:
*MO =39
i=1
(Ai ! O) # *vi =
= (2 e2 ! 3 e3) # (2 e1 + e2 ! e3)++ (!2 e1 + e2 + 5 e3) # (e1 ! 3 e2 + 4e3)++ (!3 e1 ! e2 + 2 e3) # (e1 ! 2 e2) =
=
!!!!!!
e1 e2 e3
0 2 !32 1 !1
!!!!!!+
!!!!!!
e1 e2 e3
!2 1 51 !3 4
!!!!!!+
!!!!!!
e1 e2 e3
!3 !1 21 !2 0
!!!!!!
= (e1 ! 6 e2 ! 4 e3) + (19 e1 + 13 e2 + 5 e3) + (4 e1 + 2 e2 + 7 e3) == 24 e1 + 9 e2 + 8 e3 .
Ne deriva allora che
*R# *MO = (4 e1!4 e2+3 e3)#(24 e1+9 e2+8 e3) =
!!!!!!
e1 e2 e3
4 !4 324 9 8
!!!!!!= !59 e1+40 e2+132 e3
per cui
1|*R|2
*R # *MO =141
(!59 e1 + 40 e2 + 132 e3) = !5941
e1 +4041
e2 +13241
e3
e l’equazione parametrica dell’asse centrale risulta:
P !O =1
|*R|2*R# *MO +'*R = !59
41e1 +
4041
e2 +13241
e3 +'(4 e1 ! 4 e2 +3 e3) %' " R
ossia '(((((()
((((((*
x = !5941
+ 4'
y =4041
! 4'
z =13241
+ 3'
%' " R . (480.1)
Verifica dell’equazione dell’asse centraleUn punto dell’asse centrale si puo ricavare dall’equazione (480.1) fissando il parametro', ad esempio ponendo ' = 0 — che costituisce senza dubbio la scelta piu semplice. Siconsidera percio il punto B individuato dal vettore posizione:
B ! O = !5941
e1 +4041
e2 +13241
e3 .
Stefano Siboni 2472

Universita degli studi di Trento Esercizi di Meccanica razionale
La formula del cambiamento del polo fornisce il momento risultante in B del sistema S:
*MB = *MO + (O ! B) # *R = *MO + *R # (B ! O) =
= 24 e1 + 9 e2 + 8 e3 + (4 e1 ! 4 e2 + 3 e3) #$!59
41e1 +
4041
e2 +13241
e3
%=
= 24 e1 + 9 e2 + 8 e3 !64841
e1 !70541
e2 !7641
e3 =33641
e1 !33641
e2 +25241
e3
che e chiaramente proporzionale al risultante:
*MB =8441
$4 e1 ! 4, e2 + 3 e3
%=
8441
*R
come richiesto dalla definizione dell’asse centrale.
(b) Momento assialeSi vuole determinare il momento assiale del sistema di vettori applicati rispetto alla rettaa di equazione
x = 2+ ! 1 y = !+ z = 3+ + 1 , + " R ,
orientata nel senso delle + crescenti. Un punto A dell’asse si ottiene per + = 0 ed e quindidato dal vettore posizione
A !O = ! e1 + e3 .
Rispetto a questo punto il momento risultante di S si ottiene immediatamente dalla formuladel cambiamento del polo:
*MA = *MO + (O ! A) # *R = *MO + *R # (A ! O) == 24 e1 + 9 e2 + 8 e3 + (4 e1 ! 4 e2 + 3 e3) # (! e1 + e3) =
= 24 e1 + 9 e2 + 8 e3 +
!!!!!!
e1 e2 e3
4 !4 3!1 0 1
!!!!!!=
= 24 e1 + 9 e2 + 8 e3 ! 4 e1 ! 7 e2 ! 4 e3 = 20 e1 + 2 e2 + 4 e3 .
D’altra parte, il versore associato all’asse a si ottiene normalizzando la derivata prima dellaparametrizzazione rispetto al parametro +:
n =2 e1 ! e2 + 3 e3
|2 e1 ! e2 + 3 e3|=
2 e1 ! e2 + 3 e3$14
e il momento assiale relativo ad a si scrive pertanto:
*Ma = *MA · n = (20 e1 + 2 e2 + 4 e3) ·2 e1 ! e2 + 3 e3$
14=
50$14
.
Stefano Siboni 2473

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 481. Punto vincolato a una curva fissa e lisciaUn punto materiale pesante P di massa m scorre nel piano Oxy di una terna inerzialeOxyz, con l’asse verticale Oy diretto verso l’alto, lungo la curva di equazione y = x3 ! 3x,x " R. Determinare del sistema:
(a) le equazioni pure del moto, qualora si assuma la curva liscia;(b) gli equilibri, sempre nell’ipotesi di curva liscia;(c) gli equilibri se la curva ha coe!ciente di attrito radente statico µs = 0.1.
Soluzione(a) Equazioni pure del moto lungo la curva lisciaLa curva lungo la quale avviene il moto del punto P ha una parametrizzazione della forma
P ! O = x e1 + f(x) e2 , x " R ,
con f(x) = x3 ! 3x. La curva risulta regolare, dal momento che e sempre non nullo ilvettore tangente
P "(x) = e1 + f "(x) e2 .
Per un generico moto possibile del sistema, individuato da una qualsiasi funzione x(t) diclasse C2 in un intervallo di tempo, la velocita e l’accelerazione istantanee si scrivono:
P = [e1 + f "(x) e2 ]x P = [e1 + f "(x) e2 ]x + f ""(x)x2 e2
in cui le derivate prima e seconda di f(x) sono date da:
f "(x) = 3x2 ! 3 f ""(x) = 6x .
Indicata con *$ la reazione vincolare applicata al punto materiale, l’equazione del moto delsistema diventa
mP = !mg e2 + *$
e proiettata lungo il vettore tangente si riduce alla forma pura
mP · P "(x) = !mg e2 · P "(x)
ovvero am[1 + f "(x)2 ]x + mf "(x)f ""(x)x2 = !mgf "(x) .
La forma esplicita di questa equazione e
m71 + 9(x2 ! 1)2
8x + m 3(x2 ! 1) 6x x2 = !mg 3(x2 ! 1)
ossiam71 + 9(x2 ! 1)2
8x + 18mx(x2 ! 1) x2 = !3mg(x2 ! 1) . (481.1)
Stefano Siboni 2474

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Equilibri per il caso della curva vincolare lisciaNel caso che la curva sia priva di attrito gli equilibri del sistema si ricavano cercandole soluzioni costanti dell’equazione pura del moto (481.1), ossia risolvendo l’equazionealgebrica:
0 = !3mg(x2 ! 1) ,
le cui soluzioni risultanox = !1 x = +1 .
Gli equilibri del sistema sono percio le configurazioni individuate dai vettori posizione:P (!1) ! O = !e1 + f(!1) e2 = !e1 + 2 e2
P (+1) ! O = e1 + f(1) e2 = e1 ! 2 e2 .
(c) Equilibri nel caso di curva vincolare con attrito radentePoiche l’asse Oy e verticale e il punto P e soggetto soltanto al proprio peso, le configurazionidi equilibrio del sistema corrispondono a tutti e soli i valori dell’ascissa x per i quali risulta
|f "(x)| ' µs
ossia|3x2 ! 3| ' 0.1
o ancora!0.1 ' 3x2 ! 3 ' 0.1 . (481.2)
La doppia diseguaglianza (481.2) equivale al sistema di disequazioni:')
*2.9 ' 3x2
3x2 ' 3.11+
')
*2.9/3 ' x2
x2 ' 3.1/3
le cui soluzioni si identificano con quelle del sistema')
*x ' !
52.9/3
!5
3.1/3 ' x '5
3.1/3
e dell’ulteriore sistema: ')
*x (
52.9/3
!5
3.1/3 ' x '5
3.1/3 .
Gli equilibri del sistema si hanno dunque per
!5
3.1/3 ' x ' !5
2.9/3
e per 52.9/3 ' x '
53.1/3 .
I valori numerici delle ascisse di equilibrio sono molto prossimi a quelli degli equilibri inassenza di attrito — rispettivamente x = !1 e x = 1 —
!1.01653005 ' x ' !0.98319208 0.98319208 ' x ' 1.01653005 .
Cio a causa del valore relativamente modesto del coe!ciente di attrito radente statico µs.
Stefano Siboni 2475

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 482. Matrice, momenti principali e terna principale d’inerziaUna lamina triangolare T = OAB, meta di un quadrato di lato a, si colloca nel piano Oxy,con i due lati uguali lungo gli assi. La sua densita e data da
&(x, y) = 280µx2y2/a6 % (x, y) " T ,
essendo µ > 0 una massa caratteristica. Una sbarra rettilinea OC , di lunghezza a, e postalungo la bisettrice del III quadrante e ha densita
,(P ) =µ
a2|P !O| %P " OC .
Determinare del sistema:
(a) la matrice d’inerzia in Oxyz;(b) i momenti principali d’inerzia in O e una terna principale d’inerzia in O.
Soluzione(a) Matrice d’inerzia in OxyzLa proprieta additiva consente di esprimere la matrice d’inerzia del sistema rispetto allaterna Oxyz come somma delle matrici d’inerzia, relative alla stessa terna, della laminatriangolare e della sbarra. Si osservi che il punto O di intersezione fra lamina e sbarra dacontributo nullo tanto agli integrali di superficie su T quanto a quelli curvilinei su OC .
Matrice d’inerzia della lamina triangolare TLa lamina triangolare giace nel piano coordinato Oxy della terna cartesiana ortogonaleprescelta per il calcolo della matrice d’inerzia. La matrice d’inerzia della lamina assumerapercio la forma generale:
[LTO] =
/
1LT
xx LTxy 0
LTxy LT
yy 00 0 LT
xx + LTyy
2
4 .
Stefano Siboni 2476

Universita degli studi di Trento Esercizi di Meccanica razionale
Il momento d’inerzia relativo all’asse coordinato Ox si calcola per mezzo dell’integraledoppio
LTxx =
a6
0
dx
a!x6
0
dy y2 280µ
a6x2y2 =
280µ
a6
a6
0
dxx2
-y5
5
.a!x
y=0
=56µ
a6
a6
0
x2(a ! x)5dx
che con il cambiamento di variabile + = a ! x viene ricondotto a:
LTxx =
56µ
a6
a6
0
(a ! +)2+5d+ =56µ
a6
a6
0
(a2 ! 2a+ + +2)+5d+ =
=56µ
a6
a6
0
(a2+5 ! 2a+6 + +7)d+ =56µ
a6
-a2 +6
6! 2a
+7
7+
+8
8
.a
0
=
=56µ
a6
$a2 a6
6! 2a
a7
7+
a8
8
%= 56µa2
$16! 2
7+
18
%=
13µa2 .
Il momento d’inerzia rispetto all’asse Oy assume lo stesso valore precedente:
LTyy =
a6
0
dx
a!x6
0
dy x2 280µ
a6x2y2 =
280µ
a6
a6
0
dxx4
a!x6
0
dy y2 =280µ
a6
a6
0
dxx4 (a ! x)3
3=
=280µ
3a6
a6
0
x4(a3 ! 3a2x + 3ax2 ! x3)dx =280µ
3a6
a6
0
(a3x4 ! 3a2x5 + 3ax6 ! x7)dx =
=280µ
3a6
-a3 x5
5! 3a2 x6
6+ 3a
x7
7! x8
8
.a
0
=2803
µa2$1
5! 1
2+
37! 1
8
%=
13µa2 ,
risultato al quale si puo peraltro pervenire notando che la retta y = x nel piano Oxycostituisce un asse di simmetria della lamina:
&(x, y) =280µ
a6x2y2 =
280µ
a6y2x2 = &(y, x) % (x, y) " T
in modo che:LT
xx =6
T
y2dxdy =6
T
x2dydx = LTyy
grazie al cambiamento di variabili, con jacobiano unitario, (x, y) * (y, x). Per l’unicoprodotto d’inerzia non banale si ha invece:
LTxy = !
a6
0
dx
a!x6
0
dy xy280µ
a6x2y2 = !280µ
a6
a6
0
dxx3
a!x6
0
dy y3 = !280µ
a6
a6
0
dxx3 (a ! x)4
4
Stefano Siboni 2477

Universita degli studi di Trento Esercizi di Meccanica razionale
ed il cambiamento di variabile + = a ! x conduce all’espressione:
LTxy = !70µ
a6
a6
0
(a ! +)3+4 d+ = !70µ
a6
a6
0
(a3 ! 3a2+ + 3a+2 ! +3)+4 d+ =
= !70µ
a6
-a3 +5
5! 3a2 +6
6+ 3a
+7
7! +8
8
.a
0
= !70µa2$1
5! 1
2+
37! 1
8
%= !1
4µa2 .
La matrice d’inerzia della lamina piana vale quindi:
[LTO] = µa2
/
11/3 !1/4 0!1/4 1/3 0
0 0 2/3
2
4 .
Matrice d’inerzia della sbarra OCLa matrice d’inerzia dell’asta OC ha una struttura analoga a quella della lamina:
[LOCO ] =
/
1LOC
xx LOCxy 0
LOCxy LOC
yy 00 0 LOC
xx + LOCyy
2
4
e di cui conviene calcolare gli elementi ricorrendo alla parametrizzazione:
P ! O = x e1 + x e2 %x " [!a/$
2, 0]
in termini dell’ascissa x. La derivata prima della parametrizzazione vale
P "(x) = e1 + e2
con modulo|P "(x)| =
$2
in modo che l’elemento infinitesimo di lunghezza della sbarra diventa
ds = |P "(x)| dx =$
2 dx
mentre la densita della sbarra assume la forma
,(x) =µ
a2|x e1 + x e2| =
µ
a2
$2 |x| = !
$2µ
a2x %x " [!a/
$2, 0] .
Si hanno allora i momenti d’inerzia
LOCxx =
06
!a/#
2
dx$
2x2$!$
2µ
a2x%
= !2µ
a2
06
!a/#
2
x3dx =
= !2µ
a2
-x4
4
.0
!a/#
2
= !2µ
a2
$!1
4a4
4
%=
18µa2
LOCyy =
06
!a/#
2
dx$
2x2$!$
2µ
a2x%
= LOCxx =
18µa2
Stefano Siboni 2478

Universita degli studi di Trento Esercizi di Meccanica razionale
mentre il prodotto d’inerzia LOCxy risulta
LOCxy = !
06
!a/#
2
dx$
2x2$!$
2µ
a2x%
= !LOCxx = !1
8µa2 .
La matrice d’inerzia della sbarra risulta cosı:
[LOCO ] = µa2
/
11/8 !1/8 0!1/8 1/8 0
0 0 1/4
2
4 .
Matrice d’inerzia del sistemaLa somma delle matrici d’inerzia parziali appena calcolate fornisce la matrice d’inerzia delsistema:
[LO] = [LTO] + [LOC
O ] = µa2
/
11/3 !1/4 0!1/4 1/3 0
0 0 2/3
2
4+ µa2
/
11/8 !1/8 0!1/8 1/8 0
0 0 1/4
2
4 =
= µa2
/
111/24 !3/8 0!3/8 11/24 0
0 0 11/12
2
4 .
(b) Momenti e terna principale d’inerzia in OMomenti principali d’inerzia in OPer definizione, i momenti principali d’inerzia in O del sistema sono gli autovalori A1, A2,A3 dell’operatore d’inerzia in O. L’equazione caratteristica dell’operatore e data da
det([LO] !AI) = 0
e con la sostituzione A = ,µa2 diventa
det
/
111/24 ! , !3/8 0
!3/8 11/24! , 00 0 11/12! ,
2
4 = 0
ossia -$1124
! ,%2
! 964
.$1112
! ,%
= 0 .
Ne deriva la scomposizione in fattori:$, ! 11
24! 3
8
%$, ! 11
24+
38
%$1112
! ,%
= 0
e quindi $, ! 5
6
%$, ! 1
12
%$1112
! ,%
= 0 ,
Stefano Siboni 2479

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui i momenti principali d’inerzia in O del sistema sono:
A1 =56µa2 A2 =
112
µa2 A3 =1112
µa2 .
Terna principale d’inerzia in OUna terna principale d’inerzia in O del sistema si individua immediatamente notando che:
. il sistema e piano e giace per intero nel piano coordinato Oxy, che dunque costituisceun piano principale d’inerzia in O del sistema. L’asse Oz e percio un asse principaled’inerzia in O del sistema;
. la bisettrice del I e III quadrante e un asse di simmetria del sistema. Che la bisettricecostituisca un asse di simmetria e evidente per la sbarra, che giace lungo tale retta,mentre la lamina triangolare questa circostanza e gia stata sottolineata in precedenza.
Una terna principale d’inerzia in O del sistema e quindi quella con origine in O e baseortonormale associata composta dai versori:
g1 =1$2
e1 +1$2
e2 g2 = ! 1$2
e1 +1$2
e2 g3 = e3 . (482.1)
Si intende che allo stesso risultato e possibile pervenire determinando gli autovettori dellamatrice [LO], come di seguito illustrato.
Autovalore ,1 = 5/6In questo caso il sistema di equazioni lineari omogenee che individua gli autovettori asso-ciati all’autovalore assegnato e dato da:
([LO] ! ,1I)
/
1v1
v2
v3
2
4 = 0 1+
/
1!3/8 !3/8 0!3/8 !3/8 0
0 0 1/12
2
4
/
1v1
v2
v3
2
4 = 0
vale a dire: '(((((()
((((((*
!38v1 !
38v2 = 0
!38v1 !
38v2 = 0
112
v3 = 0
per cui risulta v2 = !v1 e v3 = 0. A questo autospazio e associato l’autovalore g2 in(482.1).
Autovalore ,2 = 1/12Nella fattispecie gli autovettori sono determinati dal sistema di equazioni lineari omogenee:
([LO] ! ,2I)
/
1v1
v2
v3
2
4 = 0 1+
/
13/8 !3/8 0!3/8 3/8 0
0 0 5/6
2
4
/
1v1
v2
v3
2
4 = 0
Stefano Siboni 2480

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia: '(((((()
((((((*
38v1 !
38v2 = 0
!38v1 +
38v2 = 0
56v3 = 0
in modo che v2 = v1 e v3 = 0. A questo autospazio appartiene l’autovalore g1 della baseortonormale (482.1).
Autovalore ,3 = 11/12In quest’ultimo caso il risultato e ovvio, in quanto:
([LO] ! ,3I)
/
1v1
v2
v3
2
4 = 0 1+
/
1!11/24 !3/8 0!3/8 !11/24 0
0 0 0
2
4
/
1v1
v2
v3
2
4 = 0
e quindi: '((()
(((*
!1124
v1 !38v2 = 0
!38v1 !
1124
v2 = 0
0 = 0cosicche v1 = v2 = 0 e v3 &= 0. A questo autospazio e associato l’autovalore g3 = e3 dellabase (482.1).
La figura seguente mette in evidenza la terna principale d’inerzia O+0z del sistema:
specificando, in particolare, i versori non banali g1 e g2 della base ortonormale associata.
Stefano Siboni 2481

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 483. Analisi asintotica per una classe di equazioni di!erenziali in R3
Si consideri l’equazione di"erenziale della forma
x = x # x
|x|f(t, x, x) (483.1)
dove x e un vettore dello spazio R3 munito dell’usuale prodotto esterno #, x e x indicano lederivate prima e seconda di x rispetto alla variabile indipendente t, |x| e la norma euclideadi x in R3, e f(t, x, x) rappresenta una qualsiasi funzione reale tale che il membro destrodi (483.1) sia una funzione C1 in (t, x, x) " R - R3 - R3. Si chiede di dimostrare che:(a) tutte le soluzioni massimali di (483.1) sono definite % t " R;(b) qualsiasi soluzione non costante tende all’infinito per t * +);(c) per qualsiasi soluzione non nulla x(t) esiste il limite limt$+% x(t)/|x(t)|;(d) per le stesse soluzioni del punto (c) esiste il limite limt$+% x(t), in modo che qualsiasi
soluzione non costante tende all’infinito, asintoticamente, lungo una retta.
Soluzione(a) Soluzioni massimali definite a tutti i tempiPer prima cosa si osserva come esistenza ed unicita delle soluzioni massimali per qualsiasiproblema di Cauchy siano assicurate dalla regolarita del membro destro in (483.1). Indicatocon (·) l’usuale prodotto scalare in R3, l’equazione (483.1) implica che lungo una qualsiasisoluzione massimale si abbia
x · x = x # x
|x|f(t, x, x) · x = 0
ossiad
dt
$ x2
2
%= 0
e di conseguenzax2 = x(0)2 = ) ,
dove ) e una costante non negativa. Analogamente, dall’equazione (483.1) deriva che
x · x = x # x
|x|f(t, x, x) · x = 0
per cuid2x2
dt2= 2
d
dt(x · x) = 2x2 + 2x · x = 2)
ed una integrazione membro a membro rispetto al tempo, fra 0 e t, fornisce
dx2
dt=
dx2
dt(0) + 2)t
Stefano Siboni 2482

Universita degli studi di Trento Esercizi di Meccanica razionale
o infine, integrando una seconda volta la relazione ottenuta,
x2 = x(0)2 + 2x(0) · x(0) t + )t2 . (483.2)
L’equazione (483.2) a"erma che qualsiasi soluzione x(t) dell’equazione di"erenziale e li-mitata su un qualsiasi intervallo di tempo limitato. Cio basta ad assicurare che qualsiasisoluzione massimale x(t) di (483.1) sia definita per qualsiasi istante t " R. Il risultato segueimmediatamente dal teorema di prolungabilita, dal momento che x(t) non puo risultareillimitata in un intervallo di tempo limitato.Per inciso, si osservi che la funzione |x(t)| dipende, come deve, dalle condizioni inizialix(0), x(0), ma non dalla forma della funzione scalare f(t, x, x):
|x(t)| = [x(0)2 + 2x(0) · x(0) t + x(0)2t2]1/2 % t " R ,
che quindi concorre a determinare il solo andamento “angolare” della soluzione.
(b) Divergenza a +) di tutte le soluzioni non costantiE evidente che qualsiasi funzione costante x(t) = x0 " R3, t " R, costituisce una soluzionemassimale di (483.1). Viceversa, l’equazione (483.2) mostra inequivocabilmente che unasoluzione completa x(t) non tende all’infinito se e soltanto se
x(0) = 0 ,
vale a dire se essa soddisfa condizioni iniziali della forma
x(0) = x0 " R3 x(0) = 0
e risulta percio costante % t " R. La prova e completa.
(c) Limite per t * +) delle soluzioni non nulleIn primo luogo, e evidente che il limite limt$+% x(t)/|x(t)| esiste per tutte le soluzionicostanti non nulle. D’altra parte, in linea di principio una soluzione non costante potrebbepassare infinite volte per x = 0 al crescere di t, pregiudicando l’esistenza del limitelimt$+% x(t)/|x(t)|. In realta questa circostanza non ricorre: una soluzione x(t) nonnulla passa per x = 0 se e soltanto se essa ha per orbita una retta passante per l’origine —soluzione radiale. Per convincersene, basta osservare che il passaggio per l’origine equivaleall’annullarsi di |x(t)|2 ad un qualche istante t e che il minimo della funzione quadratica
|x(t)|2 = x(0)2 + 2x(0) · x(0) t + )t2 ,
essendo ) = x(0)2 > 0, ricorre per
t = ! 12)
2x(0) · x(0) = !x(0) · x(0)x(0)2
mentre il valore del minimo risulta
x(0)2 !-x(0) · x(0)
|x(0)|
.2
. (483.3)
Stefano Siboni 2483

Universita degli studi di Trento Esercizi di Meccanica razionale
Per la diseguaglianza di Cauchy-Schwarz, quest’ultima espressione si annulla se e soltantose i vettori x(0) e x(0) sono paralleli; e allora facile verificare che la soluzione massimaledi (483.1) con tali dati iniziali vale
x(t) = x(0) + t x(0) % t " R
dal momento che
0 = x(0) # x(0) + t x(0)|x(0) + t x(0)| f(t, x(0) + t x(0), x(0)) = 0 % t " R
e le condizioni iniziali sono banalmente verificate. La soluzione ha andamento uniforme int e la sua orbita si sviluppa lungo la retta passante per l’origine e di direzione x(0), comea"ermato. La soluzione tende ovviamente all’infinito per t * +) e soddisfa
limt$+%
x(t)|x(t)| = lim
t$+%
x(0) + t x(0)|x(0) + t x(0)| =
x(0)|x(0)| .
In ogni altro caso l’espressione (483.3) e strettamente positiva e di conseguenza la soluzionenon passa per l’origine x = 0. Si puo allora scrivere
x(t) = %(t) r(t) (483.4)
con le funzioni%(t) = |x(t)| e r(t) = x(t)/|x(t)|
entrambe di classe C2 in t " R. Ne deriva che
x = % r + %dr
dt
e per la mutua ortogonalita dei vettori r e dr/dt:
%2 + %2$dr
dt
%2= ) > 0
mentre la (483.2) diventa
%2 = x(0)2 + 2x(0) · x(0) t + ) t2 (483.5)
e derivata termine a termine rispetto al tempo porge
% % = x(0) · x(0) + ) t . (483.6)
Le espressioni ottenute consentono di ricavare (dr/dt)2:
$dr
dt
%2=
)
%2! %2
%2=
)
%2! [x(0) · x(0) + ) t]2
%4= (483.7)
=)%2 ! [x(0) · x(0) + ) t]2
%4=
x(0)2x(0)2 ! [x(0) · x(0)]2
[x(0)2 + 2x(0) · x(0) t + x(0)2t2]2
Stefano Siboni 2484

Universita degli studi di Trento Esercizi di Meccanica razionale
e di verificare quindi che limt$+% dr/dt = 0, avendosi x(0) &= 0. Per provare che esiste illimite limt$+% r(t), si pone per brevita
' = x(0)2 ( = x(0) · x(0) ) = x(0)2
e si introducono le componenti di r rispetto ai versori e1e2e3 di una terna cartesianaortogonale di origine x = 0:
r = n1e1 + n2e2 + n3e3 .
Si ha allora, % t " R e % i = 1, 2, 3,
$dni
dt
%2'$dn1
dt
%2+$dn2
dt
%2+$dn3
dt
%2=$dr
dt
%2=
') ! (2
(' + 2( t + ) t2)2
e quindi, ricordando che ') ! (2 > 0,!!!!dni
dt
!!!! '5
') ! (2
' + 2( t + ) t2
ossia
!5
') ! (2
' + 2( t + ) t2' dni
dt'
5') ! (2
' + 2( t + ) t2.
Basta cosı integrare la relazione precedente fra due istanti generici t1 e t2, con t1 < t2, perottenere la diseguaglianza
!5
') ! (2
t26
t1
1' + 2( t + ) t2
dt ' ni(t2) ! ni(t1) '5
') ! (2
t26
t1
1' + 2( t + ) t2
dt
che equivale a!!ni(t2) ! ni(t1)
!! '5
') ! (2
t26
t1
1' + 2( t + ) t2
dt ,
e puo scriversi esplicitamente come
!!ni(t2) ! ni(t1)!! '
!!!!arctg$ ( + )t25
') ! (2
%! arctg
$ ( + )t15') ! (2
%!!!!
in quanto 61
' + 2( t + ) t2dt =
15') ! (2
arctg$ ( + )t5
') ! (2
%
per ') ! (2 > 0. Avendosi
15') ! (2
arctg$ ( + )t5
') ! (2
%!!!!!!!!*
t$+%
15') ! (2
"
2,
Stefano Siboni 2485
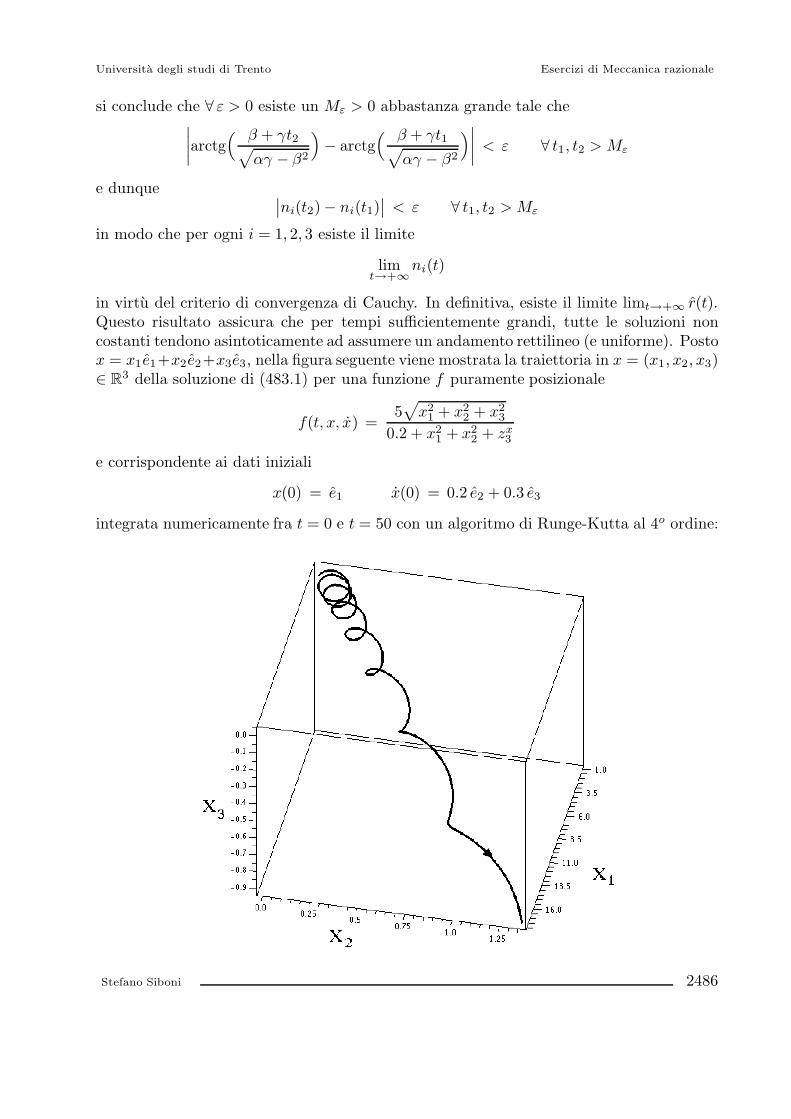
Universita degli studi di Trento Esercizi di Meccanica razionale
si conclude che % 1 > 0 esiste un M% > 0 abbastanza grande tale che!!!!arctg
$ ( + )t25') ! (2
%! arctg
$ ( + )t15') ! (2
%!!!! < 1 % t1, t2 > M%
e dunque !!ni(t2) ! ni(t1)!! < 1 % t1, t2 > M%
in modo che per ogni i = 1, 2, 3 esiste il limite
limt$+%
ni(t)
in virtu del criterio di convergenza di Cauchy. In definitiva, esiste il limite limt$+% r(t).Questo risultato assicura che per tempi su!cientemente grandi, tutte le soluzioni noncostanti tendono asintoticamente ad assumere un andamento rettilineo (e uniforme). Postox = x1e1+x2e2+x3e3, nella figura seguente viene mostrata la traiettoria in x = (x1, x2, x3)" R3 della soluzione di (483.1) per una funzione f puramente posizionale
f(t, x, x) =55
x21 + x2
2 + x23
0.2 + x21 + x2
2 + zx3
e corrispondente ai dati iniziali
x(0) = e1 x(0) = 0.2 e2 + 0.3 e3
integrata numericamente fra t = 0 e t = 50 con un algoritmo di Runge-Kutta al 4o ordine:
Stefano Siboni 2486
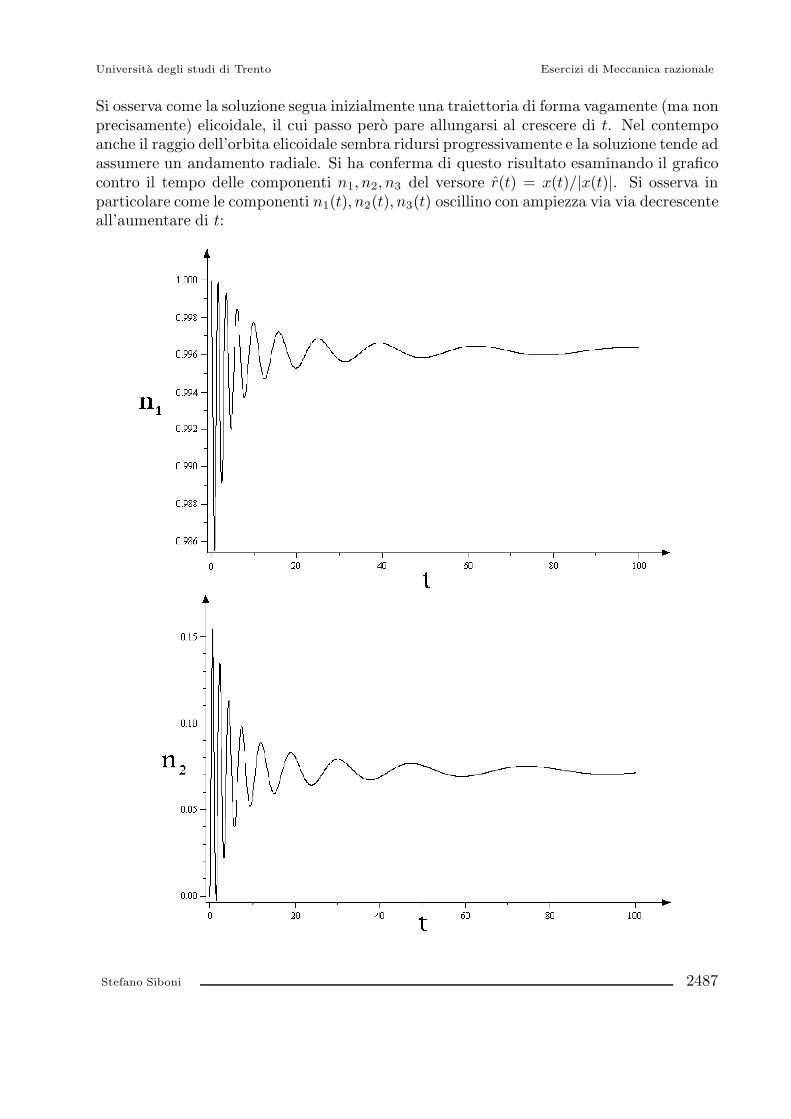
Universita degli studi di Trento Esercizi di Meccanica razionale
Si osserva come la soluzione segua inizialmente una traiettoria di forma vagamente (ma nonprecisamente) elicoidale, il cui passo pero pare allungarsi al crescere di t. Nel contempoanche il raggio dell’orbita elicoidale sembra ridursi progressivamente e la soluzione tende adassumere un andamento radiale. Si ha conferma di questo risultato esaminando il graficocontro il tempo delle componenti n1, n2, n3 del versore r(t) = x(t)/|x(t)|. Si osserva inparticolare come le componenti n1(t), n2(t), n3(t) oscillino con ampiezza via via decrescenteall’aumentare di t:
Stefano Siboni 2487
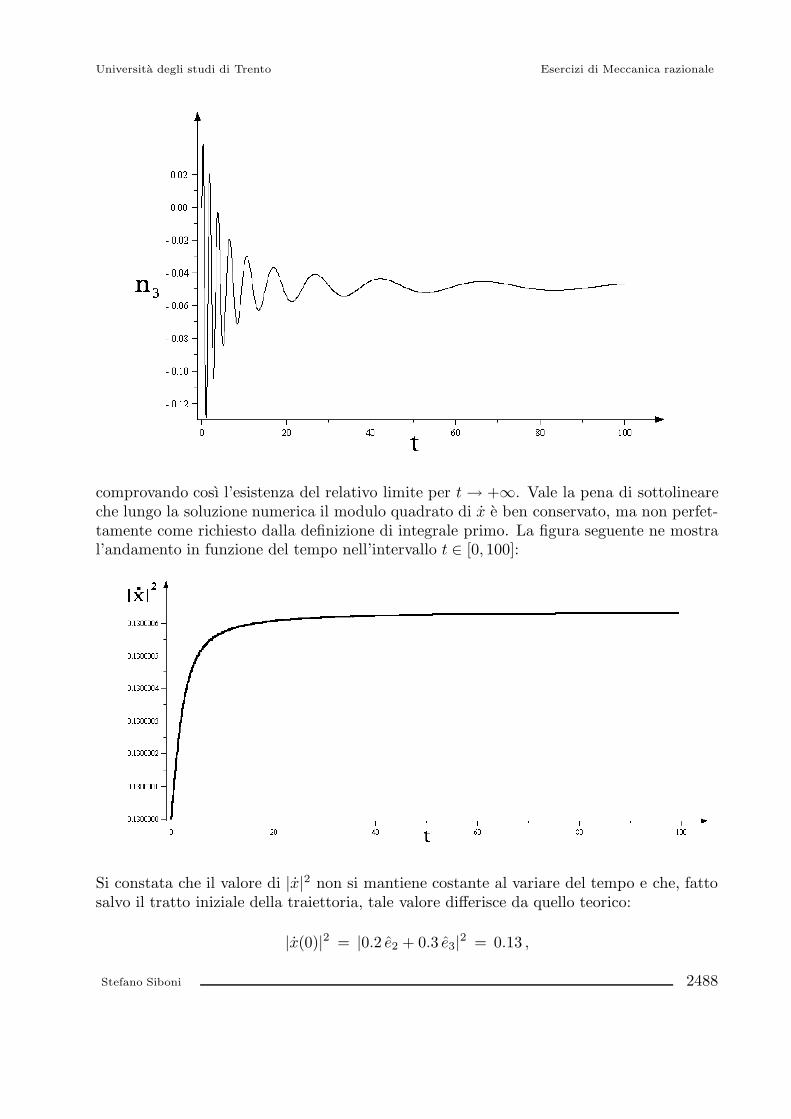
Universita degli studi di Trento Esercizi di Meccanica razionale
comprovando cosı l’esistenza del relativo limite per t * +). Vale la pena di sottolineareche lungo la soluzione numerica il modulo quadrato di x e ben conservato, ma non perfet-tamente come richiesto dalla definizione di integrale primo. La figura seguente ne mostral’andamento in funzione del tempo nell’intervallo t " [0, 100]:
Si constata che il valore di |x|2 non si mantiene costante al variare del tempo e che, fattosalvo il tratto iniziale della traiettoria, tale valore di"erisce da quello teorico:
|x(0)|2 = |0.2 e2 + 0.3 e3|2 = 0.13 ,
Stefano Siboni 2488

Universita degli studi di Trento Esercizi di Meccanica razionale
per quanto la di"erenza sia piuttosto piccola anche su un intervallo di integrazione rela-tivamente lungo. La discrepanza e evidentemente dovuta agli errori di troncamento e diarrotondamento introdotti dall’algoritmo numerico il quale, benche accurato a meno ditermini di ordine superiore al quarto rispetto al passo di integrazione in t, non tiene contoin alcun modo dell’integrale primo |x|2. La soluzione numerica conserva solo approssi-mativamente il valore dell’integrale primo |x|2, che quindi subisce una lente variazione alprogredire dell’integrazione; il processo e analogo ai fenomeni di “drift” che si verificanonella soluzione numerica delle equazioni algebrico-di"erenziali, quali quelle di Lagrangenella prima forma — si vedano in proposito gli esercizi 392 e 393.
(d) Limite per t * +) di x(t)Si considera la relazione (483.4)
x(t) = %(t) r(t)
e la si deriva rispetto al tempo per ottenere:
x(t) = %(t) r(t) + %(t)dr
dt(t)
dove l’equazione (483.5) porge
%(t) = (' + 2( t + ) t2)1/2
mentre per la (483.7) vale
$dr
dt
%2=
') ! (2
(' + 2( t + ) t2)2.
Ne deriva che!!!!%
dr
dt
!!!! = %
!!!!dr
dt
!!!! = (' + 2( t + ) t2)1/2
5') ! (2
' + 2( t + ) t2=
5') ! (2
(' + 2( t + ) t2)1/2
per cui
limt$+%
%(t)dr
dt(t) = 0 ,
mentre dalla (483.6) si ha
%(t) =( + ) t
%(t)=
( + ) t
(' + 2( t + ) t2)1/2
e siccome esiste il limite
limt$+%
%(t) = limt$+%
( + ) t
(' + 2( t + ) t2)1/2=
$) = |x(0)|
Stefano Siboni 2489

Universita degli studi di Trento Esercizi di Meccanica razionale
si conclude che esiste anche il
limt$+%
x(t) = limt$+%
%(t) limt$+%
r(t) + limt$+%
%(t)dr
dt(t) = |x(0)| lim
t$+%r(t) .
Come era lecito attendersi, il limite di x(t) coincide con quello di x(t)/|x(t)| a meno delmodulo costante |x(0)| di x.
Osservazione. Forma alternativa delle equazioni del moto.La conservazione del modulo di x permette di esprimere le equazioni del moto in una formaalternativa equivalente, che assicura l’esatta conservazione di |x| a meno dei soli errori diarrotondamento (e non anche di troncamento) e puo cosı risultare vantaggiosa nel calcolonumerico delle orbite su lunghi intervalli di tempo. La riscrittura e valida per |x| > 0, cheperaltro costituisce l’unico caso interessante dal momento che per x = 0 si ottengono tuttee sole le soluzioni costanti.Il sistema (483.1) si puo riesprimere nella forma normale equivalente del primo ordine:
'(((((((((((()
((((((((((((*
x1 = v1
x2 = v2
x3 = v3
v1 = (v2x3 ! v3x2)15
x21 + x2
2 + x23
f(t, x1 , x2, x3, v1, v2, v3)
v2 = (v3x1 ! v1x3)15
x21 + x2
2 + x23
f(t, x1 , x2, x3, v1, v2, v3)
v3 = (v1x2 ! v2x1)15
x21 + x2
2 + x23
f(t, x1 , x2, x3, v1, v2, v3)
(483.8)
ed in essa e conveniente scrivere la velocita v = x = v1e1 +v2e2 +v3e3 in coordinate polarisferiche: '
()
(*
v1 = |v| sin 2 cos /
v2 = |v| sin 2 sin /
v3 = |v| cos 2
|v| > 0 , 2 " (0,") , / " R , (483.9)
dove |v| indica il modulo — conservato e positivo — della velocita, mentre 2 e / sonorispettivamente gli angoli di colatitudine e di longitudine (o azimut) del sistema di coor-dinate sferiche rispetto all’asse azimutale x3. Si ricorda che questo sistema di coordinatenon e regolare in corrispondenza dei poli 2 = 0 e 2 = ", i quali quindi non possono essererappresentati. A causa delle singolarita introdotte dal sistema di coordinate non e perciopossibile descrivere in modo completo i moti lungo i quali, in un qualche istante, la ve-locita istantanea sia parallela all’asse azimutale x3. Derivando le (483.9) rispetto al temposi ottengono le relazioni
'(((((()
((((((*
v1 = sin 2 cos /d|v|dt
+ |v| cos 2 cos / 2 ! |v| sin2 sin / /
v2 = sin 2 sin /d|v|dt
+ |v| cos 2 sin / 2 + |v| sin2 cos / /
v3 = cos 2d|v|dt
! |v| sin 2 2
Stefano Siboni 2490

Universita degli studi di Trento Esercizi di Meccanica razionale
che possono compendiarsi nell’unica relazione matriciale
/
1v1
v2
v3
2
4 =
/
1sin 2 cos / cos 2 cos / ! sin 2 sin /sin 2 sin / cos 2 sin / sin2 cos /
cos 2 ! sin 2 0
2
4
/
01
d|v|dt|v|2|v|/
2
34
la cui matrice rappresentativa %(2,/) e invertibile %2 " (0,"):
det%(2,/) = cos 2 sin 2 cos 2 + sin2 sin22 = sin 2 > 0 ,
con inversa
%(2,/)!1 =1
sin 2
/
1sin22 cos / sin22 sin / sin2 cos 2
sin2 cos 2 cos / sin2 cos 2 sin / !sin22! sin/ cos / 0
2
4 ,
e conduce pertanto al sistema di relazioni inverse:'(((((()
((((((*
d|v|dt
= sin2 cos / v1 + sin 2 sin / v2 + cos 2 v3
|v| d2
dt= cos 2 cos / v1 + cos 2 sin / v2 ! sin2 v3
|v| d/
dt=
1sin 2
(! sin / v1 + cos / v2) .
(483.10)
La prima delle equazioni (483.10) si riduce a
d|v|dt
= (sin 2 cos / e1 + sin 2 sin / e2 + cos 2 e3) · v =v
|v| · v =v
|v| ·Jv # x
|x|f(t, x, v)K
= 0
a riprova del fatto che il modulo di x costituisce un integrale primo del sistema. Sostituendole ultime tre equazioni (483.8), tenuto conto delle definizioni (483.9) e posto per brevita
f(t, x1 , x2, x3, |v| sin2 cos /, |v| sin2 sin /, |v| cos2)5x2
1 + x22 + x2
3
= F|v|(t, x1, x2, x3,2,/) , (483.11)
la seconda delle equazioni (483.10) diventa invece
|v| d2
dt=Jcos 2 cos / (v2x3 ! v3x2) + cos 2 sin / (v3x1 ! v1x3) ! sin2 (v1x2 ! v2x1)
KF|v|
ossia|v| d2
dt=Jx1(cos 2 sin / v3 + sin 2 v2) ! x2(cos 2 cos / v3 + sin 2 v1)+
+x3(cos 2 cos / v2 ! cos 2 sin / v1)KF|v|
Stefano Siboni 2491

Universita degli studi di Trento Esercizi di Meccanica razionale
e per via delle (483.9) assume la forma piu esplicita
d2
dt=Jx1(cos 2 sin / cos 2 + sin 2 sin2 sin /) ! x2(cos 2 cos / cos 2 + sin2 sin 2 cos /)+
+x3(cos 2 cos / sin2 sin / ! cos 2 sin / sin 2 cos /)KF|v|
che si semplifica in
d2
dt= (x1 sin/ ! x2 cos /)F|v|(t, x1, x2, x3,2,/) .
A rendere in forma piu compatta la terza delle (483.10) si provvede in modo analogo
|v| d/
dt=
1sin2
(! sin/ v1 + cos / v2) =
=1
sin2
7!(v2x3 ! v3x2) sin / + (v3x1 ! v1x3) cos /
8F|v| =
=1
sin2
7x1v3 cos / + x2v3 sin / ! x3(v1 cos / + v2 sin /)
8F|v| =
=1
sin2
7x1|v| cos 2 cos / + x2|v| cos 2 sin /!
! x3(|v| sin 2 cos / cos / + |v| sin2 sin / sin/)8F|v|
per ottenere
d/
dt=-(x1 cos / + x2 sin/)
cos 2
sin 2! x3
.F|v|(t, x1, x2, x3,2,/) .
Le equazioni del moto del sistema si possono percio scrivere nella forma'(((((((((((((((()
((((((((((((((((*
dx1
dt= |v| sin 2 cos /
dx2
dt= |v| sin 2 sin /
dx3
dt= |v| cos 2
d2
dt= (x1 sin / ! x2 cos /)F|v|(t, x1, x2, x3,2,/)
d/
dt=-(x1 cos / + x2 sin /)
cos 2
sin2! x3
.F|v|(t, x1 , x2, x3,2,/)
(483.12)
con |v| costante positiva e la funzione ausiliaria F|v| data da (483.11):
F|v|(t, x1 , x2, x3,2,/) =f(t, x1 , x2, x3, |v| sin 2 cos /, |v| sin2 sin /, |v| cos2)5
x21 + x2
2 + x23
.
Stefano Siboni 2492
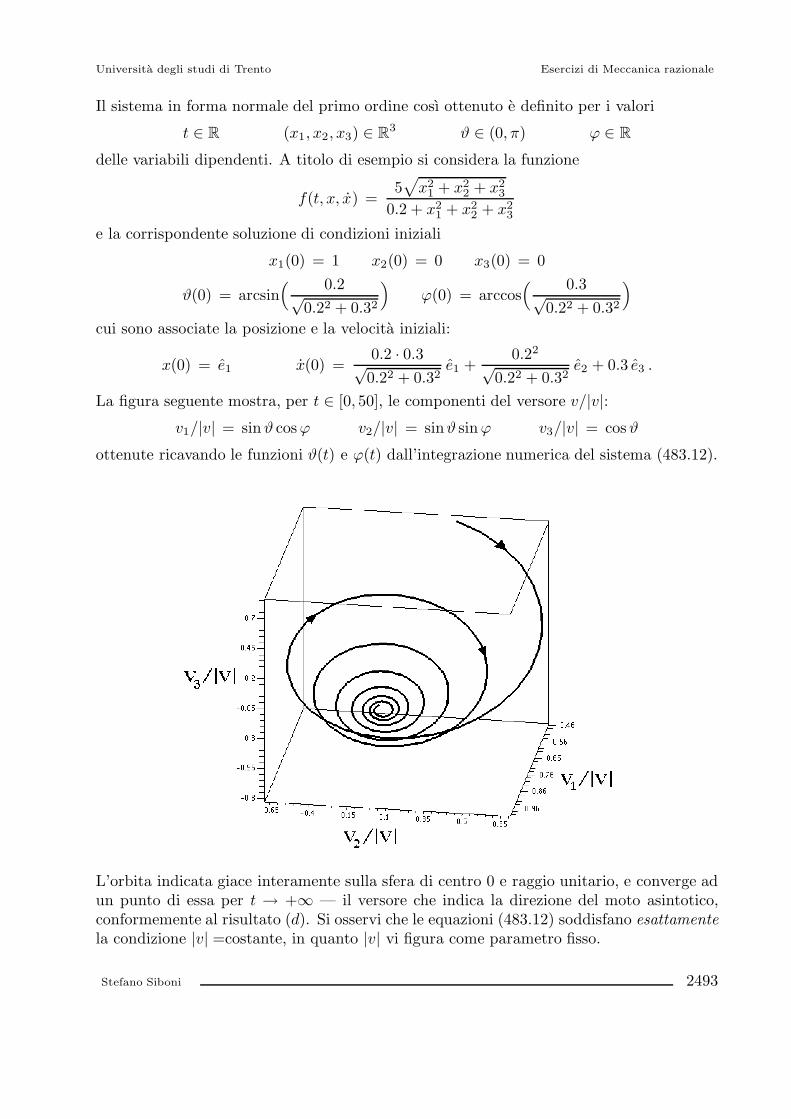
Universita degli studi di Trento Esercizi di Meccanica razionale
Il sistema in forma normale del primo ordine cosı ottenuto e definito per i valori
t " R (x1, x2, x3) " R3 2 " (0,") / " Rdelle variabili dipendenti. A titolo di esempio si considera la funzione
f(t, x, x) =55
x21 + x2
2 + x23
0.2 + x21 + x2
2 + x23
e la corrispondente soluzione di condizioni iniziali
x1(0) = 1 x2(0) = 0 x3(0) = 0
2(0) = arcsin$ 0.2$
0.22 + 0.32
%/(0) = arccos
$ 0.3$0.22 + 0.32
%
cui sono associate la posizione e la velocita iniziali:
x(0) = e1 x(0) =0.2 · 0.3$0.22 + 0.32
e1 +0.22
$0.22 + 0.32
e2 + 0.3 e3 .
La figura seguente mostra, per t " [0, 50], le componenti del versore v/|v|:v1/|v| = sin 2 cos / v2/|v| = sin2 sin / v3/|v| = cos 2
ottenute ricavando le funzioni 2(t) e /(t) dall’integrazione numerica del sistema (483.12).
L’orbita indicata giace interamente sulla sfera di centro 0 e raggio unitario, e converge adun punto di essa per t * +) — il versore che indica la direzione del moto asintotico,conformemente al risultato (d). Si osservi che le equazioni (483.12) soddisfano esattamentela condizione |v| =costante, in quanto |v| vi figura come parametro fisso.
Stefano Siboni 2493
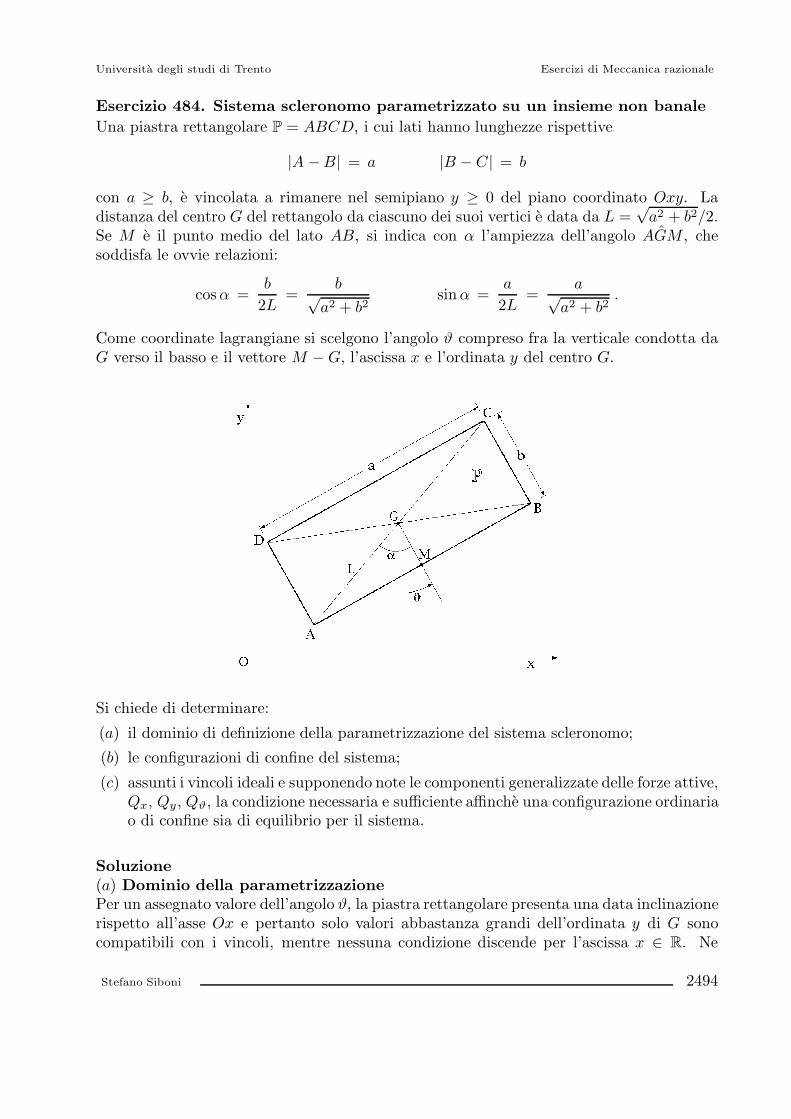
Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 484. Sistema scleronomo parametrizzato su un insieme non banaleUna piastra rettangolare P = ABCD, i cui lati hanno lunghezze rispettive
|A !B| = a |B ! C | = b
con a ( b, e vincolata a rimanere nel semipiano y ( 0 del piano coordinato Oxy. Ladistanza del centro G del rettangolo da ciascuno dei suoi vertici e data da L =
$a2 + b2/2.
Se M e il punto medio del lato AB, si indica con ' l’ampiezza dell’angolo AGM , chesoddisfa le ovvie relazioni:
cos ' =b
2L=
b$a2 + b2
sin ' =a
2L=
a$a2 + b2
.
Come coordinate lagrangiane si scelgono l’angolo 2 compreso fra la verticale condotta daG verso il basso e il vettore M ! G, l’ascissa x e l’ordinata y del centro G.
Si chiede di determinare:(a) il dominio di definizione della parametrizzazione del sistema scleronomo;(b) le configurazioni di confine del sistema;(c) assunti i vincoli ideali e supponendo note le componenti generalizzate delle forze attive,
Qx, Qy, Q&, la condizione necessaria e su!ciente a!nche una configurazione ordinariao di confine sia di equilibrio per il sistema.
Soluzione(a) Dominio della parametrizzazionePer un assegnato valore dell’angolo 2, la piastra rettangolare presenta una data inclinazionerispetto all’asse Ox e pertanto solo valori abbastanza grandi dell’ordinata y di G sonocompatibili con i vincoli, mentre nessuna condizione discende per l’ascissa x " R. Ne
Stefano Siboni 2494
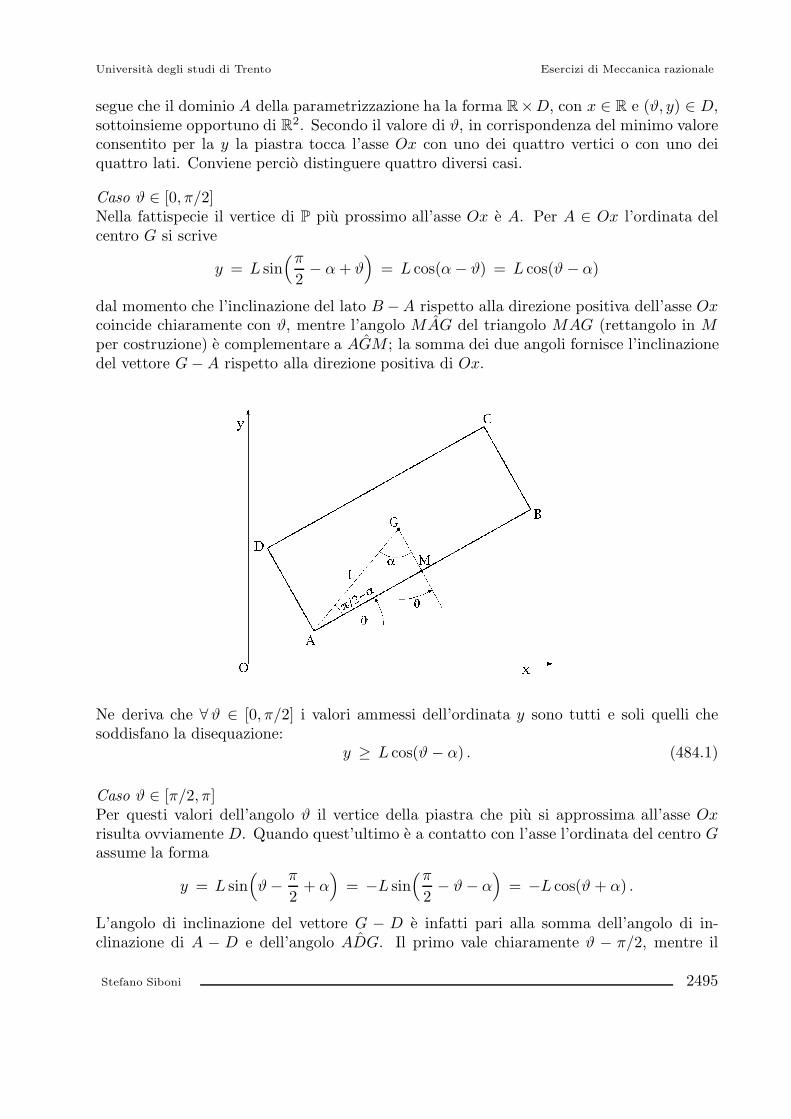
Universita degli studi di Trento Esercizi di Meccanica razionale
segue che il dominio A della parametrizzazione ha la forma R-D, con x " R e (2, y) " D,sottoinsieme opportuno di R2. Secondo il valore di 2, in corrispondenza del minimo valoreconsentito per la y la piastra tocca l’asse Ox con uno dei quattro vertici o con uno deiquattro lati. Conviene percio distinguere quattro diversi casi.
Caso 2 " [0,"/2]Nella fattispecie il vertice di P piu prossimo all’asse Ox e A. Per A " Ox l’ordinata delcentro G si scrive
y = L sin$"
2! ' + 2
%= L cos(' ! 2) = L cos(2 ! ')
dal momento che l’inclinazione del lato B !A rispetto alla direzione positiva dell’asse Oxcoincide chiaramente con 2, mentre l’angolo MAG del triangolo MAG (rettangolo in Mper costruzione) e complementare a AGM ; la somma dei due angoli fornisce l’inclinazionedel vettore G ! A rispetto alla direzione positiva di Ox.
Ne deriva che %2 " [0,"/2] i valori ammessi dell’ordinata y sono tutti e soli quelli chesoddisfano la disequazione:
y ( L cos(2 ! ') . (484.1)
Caso 2 " ["/2,"]Per questi valori dell’angolo 2 il vertice della piastra che piu si approssima all’asse Oxrisulta ovviamente D. Quando quest’ultimo e a contatto con l’asse l’ordinata del centro Gassume la forma
y = L sin$2 ! "
2+ '
%= !L sin
$"
2! 2 ! '
%= !L cos(2 + ') .
L’angolo di inclinazione del vettore G ! D e infatti pari alla somma dell’angolo di in-clinazione di A ! D e dell’angolo ADG. Il primo vale chiaramente 2 ! "/2, mentre il
Stefano Siboni 2495
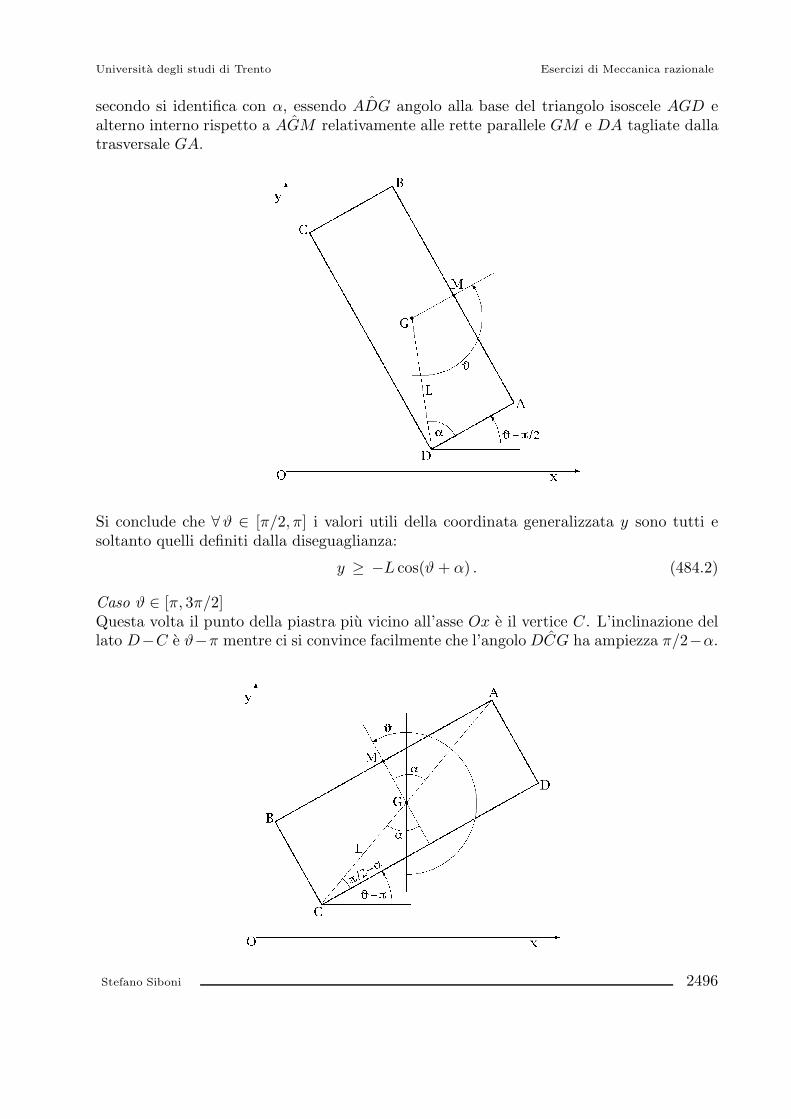
Universita degli studi di Trento Esercizi di Meccanica razionale
secondo si identifica con ', essendo ADG angolo alla base del triangolo isoscele AGD ealterno interno rispetto a AGM relativamente alle rette parallele GM e DA tagliate dallatrasversale GA.
Si conclude che %2 " ["/2,"] i valori utili della coordinata generalizzata y sono tutti esoltanto quelli definiti dalla diseguaglianza:
y ( !L cos(2 + ') . (484.2)
Caso 2 " [", 3"/2]Questa volta il punto della piastra piu vicino all’asse Ox e il vertice C . L’inclinazione dellato D!C e 2!" mentre ci si convince facilmente che l’angolo DCG ha ampiezza "/2!'.
Stefano Siboni 2496

Universita degli studi di Trento Esercizi di Meccanica razionale
Per la configurazione che vede C sull’asse Ox l’ordinata di G diventa
y = L sin$2!" +
"
2!'
%= L sin
$2! "
2!'
%= !L sin
$!2+
"
2+'
%= !L cos(2!')
e i valori dell’ordinata compatibili con i vincoli sono pertanto
y ( !L cos(2 ! ') . (484.3)
Caso 2 " [3"/2, 2"]In questo caso il vertice piu vicino all’asse Ox va identificato con B. Se B " Ox l’ordinatadi G si esprime per mezzo della relazione
y = L sin$2 ! 3"
2+ '
%= L sin
$2 +
"
2+ '
%= L cos(2 + ')
in quanto l’angolo di inclinazione del lato C ! B rispetto alla direzione positiva dell’asseOx risulta 2 ! 3"/2, mentre, al pari di ADG, l’angolo CBG ha ampiezza '.
I valori consentiti della coordinata y risultano percio tutti e soli quelli non inferiori al valorelimite appena calcolato:
y ( L cos(2 + ') . (484.4)
Essendosi gia riconosciuto preliminarmente che la coordinata x puo assumere a piacerequalsiasi valore reale, e su!ciente rappresentare i valori ammissibili delle coordinate residue2 e y in un diagramma cartesiano, riportando i valori arbitrari di 2 in ascissa e i corrispon-denti valori permessi di y in ordinata. Dato il significato geometrico della variabile angolare2, i valori permessi delle coppie (2, y) costituiscono un insieme D dall’andamento perio-dico, di periodo 2", lungo l’asse 2. E cosı su!ciente rappresentare l’intersezione di tale
Stefano Siboni 2497

Universita degli studi di Trento Esercizi di Meccanica razionale
insieme con la striscia 2 " [0, 2"]. Algebricamente, la regione di interesse e definita dal setdi disequazioni:
y (
'(()
((*
L cos(2 ! ') %2 " [0,"/2]!L cos(2 + ') %2 " ["/2,"]!L cos(2 ! ') %2 " [", 3"/2]
L cos(2 + ') %2 " [3"/2, 2"]
(484.5)
e ha l’andamento illustrato nella figura seguente:
(b) Configurazioni di confineIl grafico e le relazioni (484.5) mostrano come la frontiera .D del dominio D sia il graficodi una funzione regolare a tratti, periodica di periodo ", che nell’intervallo [0,"] consistedi due tratti sinusoidali, indicati nella figura precedente con )1 e )2. Il primo e il graficoin 2 " [0,"/2] della funzione
L cos(2 ! ')
mentre il secondo e quello di!L cos(2 + ')
nell’intervallo 2 " ["/2,"].
(c) Condizione necessaria e su"ciente per l’equilibrio nel caso di vincoli idealiIl dominio A = R - D di definizione della parametrizzazione del sistema scleronomo e unsottoinsieme chiuso di R3. Ne deriva che il sistema e a vincoli unilaterali, con configurazioniordinarie associate i punti di int(A) = R-int(D) e configurazioni di confine individuate daipunti della frontiera .A = R - .D. Nell’ipotesi di vincoli ideali, la condizione necessariae su!ciente perche una data configurazione sia di equilibrio per il sistema e o"erta dalteorema dei lavori virtuali, che impone il lavoro virtuale delle forze attive in condizionistatiche essere non positivo:
Qx 3x + Q& 32 + Qy 3y ' 0 (484.6)
Stefano Siboni 2498

Universita degli studi di Trento Esercizi di Meccanica razionale
per ogni spostamento virtuale (3x, 32, 3y) relativo alla configurazione considerata e perogni istante t " R. E inteso che nella (484.6) si e convenuto di porre, per brevita:
Qx = Qx(t, x,2, y, 0, 0, 0) Q& = Q&(t, x,2, y, 0, 0, 0) Qy = Qy(t, x,2, y, 0, 0, 0) .
E anche opportuno indicare con
ex = (1, 0, 0) e' = (0, 1, 0) ey = (0, 0, 1)
i versori della base canonica di {(x,2, y) " R3}. Appare evidente che qualunque sia laconfigurazione prescelta (x,2, y) " R-D lo spostamento virtuale lungo x e completamentearbitrario; ponendo, come e sempre lecito, 32 = 0 e 3y = 0 si ha percio la condizionenecessaria all’equilibrio:
Qx 3x ' 0 % 3x " R
e quindiQx = 0
in modo che la condizione necessaria e su!ciente per l’equilibrio si riduce alla forma
Q& 32 + Qy 3y ' 0
per ogni t " R e per ogni spostamento virtuale parziale (32, 3y) relativo alla configurazioneconsiderata.
Equilibri ordinariPer (x,2, y) " int(A), ovvero (2, y) " int(D), gli spostamenti virtuali parziali (32, 3y)sono vettori arbitrari di R2 e la condizione necessaria e su!ciente per l’equilibrio diventadunque
Qx = 0 Q& = 0 Qy = 0 % t " R .
Equilibri di confine lungo la curva y = L cos(2 ! '), 2 " (0,"/2)Nel punto
P (2) = 2 e& + L cos(2 ! ') ey , 2 " (0,"/2) ,
un vettore tangente alla curva )1 e dato da
*t1(2) = e& ! L sin(2 ! ') ey
per cui un vettore normale a )1 e diretto esternamente a D, ossia verso l’asse 2, si calcolacon l’ausilio del prodotto vettoriale:
*n1(2) = *t1(2) # ex =7e& ! L sin(2 ! ') ey
8# ex =
= !ey ! L sin(2 ! ') e& = !L sin(2 ! ') e& ! ey .
Stefano Siboni 2499

Universita degli studi di Trento Esercizi di Meccanica razionale
Gli spostamenti virtuali parziali nel piano (2, y) sono percio definiti dalla relazione
(32, 3y) = '1*t1(2) ! (1 *n1(2) %'1 " R , %(1 ( 0 , (484.7)
come evidenziato con il tratteggio nella figura seguente:
Nell’ipotesi di vincoli ideali la configurazione e di equilibrio se e solo se le componentiQx, Q&, Qy delle forze generalizzate soddisfano % t " R la condizione Qx = 0 e l’ulteriorerequisito:
Q& 32 + Qy 3y ' 0
per ogni (32, 3y) della forma (484.7), ossia:
'1 (Q& e& + Qy ey) · *t1(2) ! (1 (Q& e& + Qy ey) · *n1(2) ' 0 %'1 " R , %(1 ( 0 .
Eliminando i coe!cienti '1 e (1 si perviene alle relazioni:
(Q& e& + Qy ey) · *t1(2) = 0 (Q& e& + Qy ey) · *n1(2) ( 0 (484.8)
vale a dire, piu esplicitamente, al sistema di disequazioni:
')
*Q& ! L sin(2 ! ')Qy = 0
!L sin(2 ! ')Q& !Qy ( 0 .(484.9)
Da notare come le condizioni (484.8) corrispondano a richiedere che il vettore Q& e&+Qy ey
sia parallelo e concorde al vettore normale *n1(2):
Q& e& + Qy ey = ,[!L sin(2 ! ') e& ! ey] , ( 0
Stefano Siboni 2500

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia ')
*Q& = !,L sin(2 ! ')
Qy = !,, ( 0
condizione che si riesprime nella forma')
*Q& = Qy L sin(2 ! ')
Qy ' 0(484.10)
ed e equivalente alla (484.9).
Equilibri di confine lungo la curva y = !L cos(2 + '), 2 " ("/2,")Un vettore tangente alla curva )2 in un suo generico punto P (2) = 2 e& ! L cos(2 + ') ey ,2 " ("/2,"), si scrive
*t2(2) = e& + L sin(2 + ') ey
e ad esso corrisponde un vettore normale, diretto verso l’esterno di D, del tipo
*n2(2) = *t2(2) # ex = [e& + L sin(2 + ') ey ] # ex == !ey + L sin(2 + ') e& = L sin(2 + ') e& ! ey .
Gli spostamenti virtuali parziali, nel piano (2, y) sono dati da tutte e sole le combinazionilineari della forma
(32, 3y) = '2 *t2(2) ! (2 *n2(2) %'2 " R , %(2 ( 0
come il tratteggio evidenzia nella figura seguente:
In modo analogo a quanto gia visto per )1, e allora facile convincersi che la configurazionerisulta di equilibrio se e solo se Qx = 0 ed inoltre il vettore Q& e& + Qy ey e parallelo econcorde a *n2(2), ossia
Q& e& + Qy ey = ,[L sin(2 + ') e& ! ey]
Stefano Siboni 2501

Universita degli studi di Trento Esercizi di Meccanica razionale
per un qualche , ( 0. Quest’ultima condizione si riduce al sistema di disequazioni:')
*Q& = ,L sin(2 + ')
Qy = !,, ( 0
ed eliminando il parametro , equivale banalmente a')
*Q& = !Qy L sin(2 + ')
Qy ' 0 .(484.11)
Equilibri di confine lungo la curva y = !L cos(2 ! '), 2 " (", 3"/2)In questo caso il vettore tangente a .D diventa
*t3(2) =d
d2
72 e& ! L cos(2 ! ') ey
8= e& + L sin(2 ! ') ey
e la normale esterna a D viene quindi individuata da
*n3(2) = *t3(2) # ex = L sin(2 ! ') e& ! ey .
Oltre al consueto Qx = 0, la condizione di equilibrio consiste nel richiedere che il vettoreQ& e& + Qy ey sia parallelo e concorde a *n3(2):
Q& e& + Qy ey = ,[L sin(2 ! ') e& ! ey] , ( 0
ossia che ')
*Q& = ,L sin(2 ! ')
Qy = !,, ( 0
e quindi ')
*Q& = !QyL sin(2 ! ')
Qy ' 0 .(484.12)
Equilibri di confine lungo la curva y = L cos(2 + '), 2 " (3"/2, 2")Un vettore tangente alla frontiera .D nel suo punto P (2) = 2 e& + L cos(2 + ') ey eindividuato da
*t4(2) =d
d2[2 e& + L cos(2 + ') ey ] = e& ! L sin(2 + ') ey
e ad esso corrisponde il vettore normale, esterno a D,
*n4(2) = *t4(2) # ex = !L sin(2 + ') e& ! ey .
Stefano Siboni 2502

Universita degli studi di Trento Esercizi di Meccanica razionale
La condizione di equilibrio diventa cosı:
Q& e& + Qy ey = ,[!L sin(2 + ') e& ! ey] , ( 0
ovvero ')
*Q& = !,L sin(2 + ')
Qy = !,, ( 0
ed infine ')
*Q& = QyL sin(2 + ')
Qy ' 0 ,(484.13)
unitamente a Qx = 0.
Configurazione di (ultra)confine corrispondente a 2 = 0Nel piano (2, y) il punto di .D corrispondente a 2 = 0 non e regolare: si tratta infatti diun punto angoloso, nel quale la derivata sinistra e destra della funzione regolare a trattiche descrive .D assumono valore negativo e positivo rispettivamente:
d
d2
7L cos(2 + ')
8!!!!&=2#
= !L sin(2 + ')!!!!&=2#
= !L sin'
d
d2
7L cos(2 ! ')
8!!!!&=0
= !L sin(2 ! ')!!!!&=0
= L sin ' .
L’angolo formato in D dalle due direzioni tangenti a .D nel punto considerato ha quindiampiezza minore di " radianti: l’insieme degli spostamenti virtuali parziali (32, 3y) e uncono convesso, evidenziato con il tratteggio in figura:
Nel punto sono inoltre definiti due distinti vettori normali a .D (esterni a D), uno sinistroe uno destro:
*n4(2") = !L sin ' e& ! ey *n1(0) = L sin ' e& ! ey .
Stefano Siboni 2503

Universita degli studi di Trento Esercizi di Meccanica razionale
Per il teorema dei lavori virtuali la configurazione costituisce un equilibrio se e soltanto se,oltre ad aversi Qx = 0, il vettore Q&e& + Qy ey appartiene al cono convesso generato dallenormali esterne *n4(2") e *n1(0), vale a dire
Q&e& + Qy ey = ,1 *n4(2") + ,2 *n1(0)
ossiaQ&e& + Qy ey = ,1(!L sin' e& ! ey) + ,2(L sin ' e& ! ey)
per qualche coppia di coe!cienti ,1 ( 0 e ,2 ( 0. Separando le componenti, la condizionedi equilibrio assume la forma
')
*Q& = (!,1 + ,2)L sin '
Qy = !,1 ! ,2
,1, ,2 ( 0 .
Una condizione piu esplicita si ottiene ricavando i coe!cienti ,1, ,2 dal precedente sistemalineare: '
(()
((*
,1 = ! 12L sin'
Q& ! 12Qy
,2 = +1
2L sin'Q& ! 1
2Qy
ed imponendone il segno non negativo:'(()
((*
! 12L sin'
Q& ! 12Qy ( 0
+1
2L sin'Q& ! 1
2Qy ( 0 .
Eliminati i fattori costanti inessenziali, la condizione di equilibrio si riduce cosı a')
*Q& + L sin' Qy ' 0
Q& ! L sin' Qy ( 0 ,(484.14)
unitamente a Qx = 0.
Configurazione di (ultra)confine corrispondente a 2 = "/2Il punto di .D associato a 2 = "/2 e un punto angoloso con i vettori normali sinistro edestro:
*n1("/2) = !L cos ' e& ! ey *n2("/2) = L cos ' e& ! ey
esterni a D. Poiche anche in questo caso gli spostamenti virtuali parziali (32, 3y) costitu-iscono un cono convesso, la condizione di equilibrio diventa
Q&e& + Qy ey = ,1 *n1("/2) + ,2 *n2("/2)
Stefano Siboni 2504

Universita degli studi di Trento Esercizi di Meccanica razionale
ovveroQ&e& + Qy ey = ,1(!L cos ' e& ! ey) + ,2(L cos ' e& ! ey)
per ,1 ( 0 e ,2 ( 0 opportuni. Deve percio aversi:')
*Q& = (!,1 + ,2)L cos '
Qy = !,1 ! ,2
,1, ,2 ( 0
e la condizione di equilibrio assume la forma esplicita Qx = 0 e')
*Q& + L cos 'Qy ' 0
Q& ! L cos 'Qy ( 0 .(484.15)
Configurazione di (ultra)confine corrispondente a 2 = "Nel punto di .D corrispondente a 2 = " sono definiti i vettori normali esterni a D sinistroe destro:
*n2(") = !L sin ' e& ! ey *n3(") = L sin ' e& ! ey
e la condizione di equilibrio si riduce a
Q&e& + Qy ey = ,1 *n2(") + ,2 *n3(") = ,1 (!L sin' e& ! ey) + ,2 (L sin ' e& ! ey)
ossia ')
*Q& = (!,1 + ,2)L sin '
Qy = !,1 ! ,2
,1, ,2 ( 0 .
L’eliminazione dei coe!cienti ,1, ,2 conduce alla stessa condizione di equilibrio (484.14)della configurazione relativa a 2 = 0:
')
*Q& + L sin' Qy ' 0
Q& ! L sin' Qy ( 0 .(484.16)
Configurazione di (ultra)confine corrispondente a 2 = 3"/2Il punto individuato da 2 = 3"/2 lungo .D ammette i vettori normali sinistro e destro,esterni a D,
*n3(3"/2) = !L cos ' e& ! ey *n4(3"/2) = L cos ' e& ! ey
ed in esso la condizione di equilibrio e costituita da
Q&e& + Qy ey = ,1 *n3(3"/2) + ,2 *n4(3"/2) = ,1 (!L cos ' e& ! ey) + ,2 (L cos ' e& ! ey)
Stefano Siboni 2505

Universita degli studi di Trento Esercizi di Meccanica razionale
e riconducibile percio alle relazioni')
*Q& = (!,1 + ,2)L cos '
Qy = !,1 ! ,2
,1, ,2 ( 0
che coincidono con quelle — le (484.15) — gia stabilite per il caso di 2 = ":')
*Q& + L cos 'Qy ' 0
Q& ! L cos 'Qy ( 0 ,(484.17)
oltre all’equazione Qx = 0.
Esercizio 485. Sistema scleronomo a 3 g.d.l. posizionale conservativoSi supponga che nell’esercizio precedente l’asse Oy risulti diretto verticalmente verso l’altoe la piastra rettangolare ABCD sia omogenea e di massa m. La piastra sia inoltre soggettaal proprio peso e abbia il vertice D collegato con una molla ideale di costante k al puntofisso P dell’asse Oy, di ordinata h > 0. I vincoli si assumano ancora ideali.
Usando gli stessi parametri lagrangiani x,2, y e le stesse notazioni per le lunghezze a e b deilati, la semilunghezza L della diagonale e l’angolo al centro ', determinare del sistema:(a) gli equilibri ordinari;(b) le proprieta di stabilita degli equilibri ordinari.
Soluzione(a) Equilibri ordinariLe sollecitazioni attive che agiscono sul sistema sono il peso della piastra e l’interazioneelastica fra il punto P ed il vertice D; in ambo i casi si tratta di sollecitazioni posizionaliconservative descritte dagli opportuni potenziali, che conviene calcolare separatamente.
Stefano Siboni 2506

Universita degli studi di Trento Esercizi di Meccanica razionale
Potenziale gravitazionalePer la lamina rettangolare omogenea il centro geometrico G e anche centro di simmetria esi identifica con il baricentro del sistema. Il potenziale gravitazionale di P vale pertanto
Ug = !mg e2 · (G ! O) = !mgy .
Potenziale elasticoAll’interazione elastica fra i punti P e D e associato il potenziale
Uel = !k
2|D ! P |2
espressione nella quale occorre inserire il vettori posizione di P e D in funzione deiparametri lagrangiani. La cosa non comporta alcuna di!colta per il punto fisso P :
P ! O = he2
mentre e un poco piu complessa per il vertice D. Conviene infatti scrivere le espressioniparziali immediate:
G ! O = x e1 + y e2
M ! G =b
2sin2 e1 !
b
2cos 2 e2
A ! M = !a
2cos 2 e1 !
a
2sin2 e2
D ! A = !b sin 2 e1 + b cos 2 e2
e sommarle membro a membro per ottenere:
D ! O =$x ! b
2sin 2 ! a
2cos 2
%e1 +
$y ! a
2sin2 +
b
2cos 2
%e2
in modo che
D ! P =$x ! b
2sin 2 ! a
2cos 2
%e1 +
$y ! a
2sin2 +
b
2cos 2 ! h
%e2 .
Il vettore D ! P ha modulo quadrato:
|D ! P |2 =$x ! b
2sin2 ! a
2cos 2
%2+$y ! a
2sin2 +
b
2cos 2 ! h
%2=
= x2 +b2
4sin22 +
a2
4cos22 ! bx sin 2 ! ax cos 2 +
12ab sin 2 cos 2+
+ y2 +a2
4sin22 +
b2
4cos22 + h2 ! ay sin 2 + by cos 2 ! 2hy!
! 12ab sin 2 cos 2 + ah sin 2 ! bh cos 2 =
Stefano Siboni 2507

Universita degli studi di Trento Esercizi di Meccanica razionale
= x2 +y2 +a2
4+
b2
4+h2!x(b sin 2+a cos 2)+y(b cos 2!a sin 2!2h)+h(a sin 2!b cos 2)
ed omesse le costanti additive il potenziale elastico si riduce a
Uel = !k
2
-x2 + y2 ! x(b sin 2 + a cos 2) + y(b cos 2 ! a sin 2 ! 2h) + h(a sin 2 ! b cos 2)
..
Potenziale del sistemaIl potenziale del sistema risulta dalla somma dei potenziali parziali, gravitazionale edelastico, appena calcolati:
U = !k
2
-x2+y2!x(b sin 2+a cos 2)+y(b cos 2!a sin 2!2h)+h(a sin2!b cos 2)
.!mgy .
Equilibri ordinariGli equilibri ordinari del sistema sono tutti e soli i punti critici del potenziale nell’internodel dominio A della parametrizzazione. Si devono dunque calcolare le derivate parzialiprime del potenziale
Ux =.U
.x= !k
2(2x ! b sin 2 ! a cos 2) (485.1)
U& =.U
.2= !k
2
-x(!b cos 2 + a sin 2) + y(!b sin 2 ! a cos 2) + h(a cos 2 + b sin 2)
.
Uy =.U
.y= !k
2(2y + b cos 2 ! a sin 2 ! 2h) ! mg
ed eguagliarle a zero per ottenere le equazioni di equilibrio:'((((()
(((((*
x ! b
2sin 2 ! a
2cos 2 = 0
x(!b cos 2 + a sin 2) + y(!b sin 2 ! a cos 2) + h(a cos 2 + b sin 2) = 0
!k$y +
b
2cos 2 ! a
2sin2 ! h
%! mg = 0
(485.2)
da risolvere in int(A). La prima e la terza equazione permettono di ricavare x e y infunzione della variabile angolare:
x =b
2sin 2 +
a
2cos 2 y = !mg
k! b
2cos 2 +
a
2sin2 + h (485.3)
e sostituite nella seconda equazione conducono alla condizione di equilibrio su 2:
$ b
2sin 2 +
a
2cos 2
%(a sin 2 ! b cos 2) +
$h ! mg
k! b
2cos 2 +
a
2sin2
%(!b sin 2 ! a cos 2)
+ h(a cos 2 + b sin 2) = 0
Stefano Siboni 2508

Universita degli studi di Trento Esercizi di Meccanica razionale
che una semplice manipolazione algebrica riduce alla forma
mg
k(b sin 2 + a cos 2) = 0
ovvero ab sin 2 + a cos 2 = 0 .
L’equazione si riscrive come
tg2 = !a
b= !tg' = tg(!')
ed ammette quindi le soluzioni distinte:
2 = !' 2 = " ! '
che sono le sole candidate al ruolo di equilibri ordinari. Dalla prima delle (485.3) si verificaimmediatamente che x = 0 in ambo i casi. Occorre determinare la relativa coordinata y erichiedere che le configurazioni siano e"ettivamente interne al dominio A.
(i) Per 2 = !' l’ordinata vale
y = !mg
k! b
2cos(!') +
a
2sin(!') + h = h ! mg
k! b
2cos ' ! a
2sin' =
= h ! mg
k! b
2b$
a2 + b2! a
2a$
a2 + b2= h ! mg
k! 1
2
5a2 + b2 = h ! mg
k! L
e poiche 2 = !' corrisponde a 2 = 2" !' " (3"/2, 2"), la configurazione e ordinariase e solo se y > L cos(2 + '), ossia:
h ! mg
k! L > L cos(!' + ') = L .
(ii) Per 2 = " ! ' si ha invece
y = !mg
k! b
2cos(" ! ') +
a
2sin(" ! ') + h = h ! mg
k+
b
2cos ' +
a
2sin' =
= h! mg
k+
b
2b$
a2 + b2+
a
2a$
a2 + b2= h ! mg
k+5
a2 + b2 = h! mg
k+ L
ed essendo " ! ' " ("/2,") la configurazione risulta ordinaria se e soltanto se y >!L cos(4 + '), vale a dire
h ! mg
k+ L > !L cos(" ! ' + ') = L .
Si conclude che gli equilibri ordinari del sistema sono individuati da
(x,2, y) =$0,!', h ! mg
k! L
%
Stefano Siboni 2509
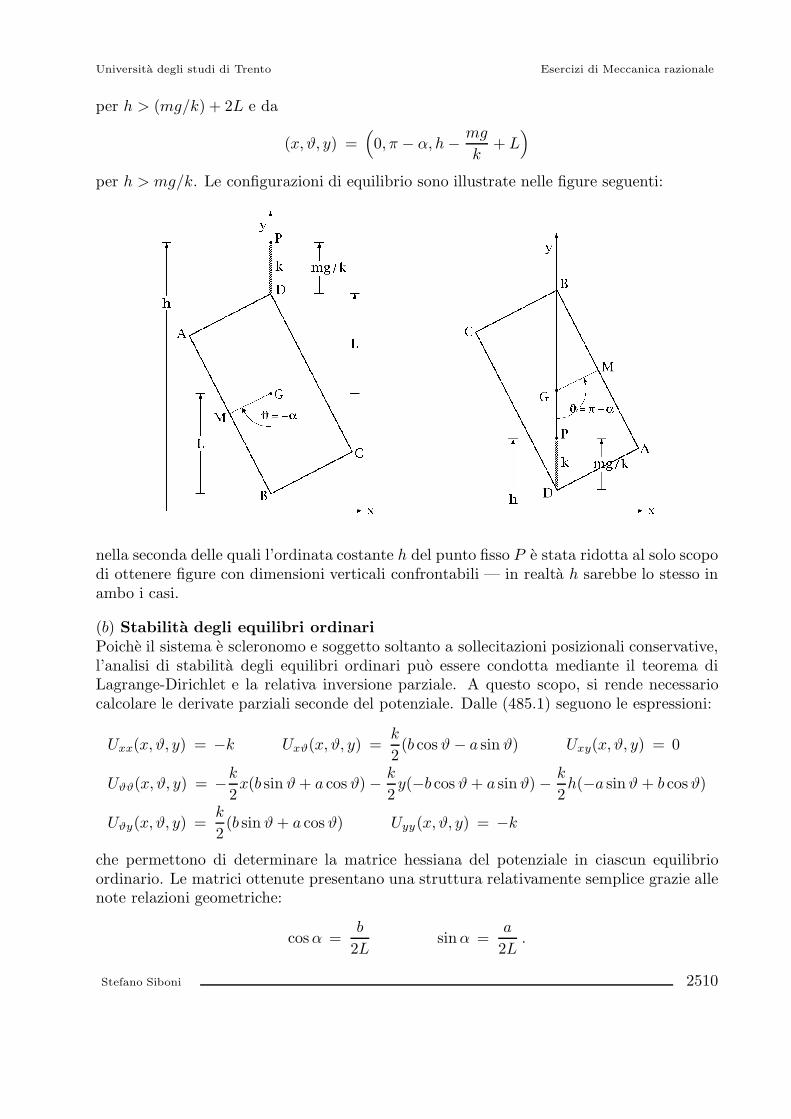
Universita degli studi di Trento Esercizi di Meccanica razionale
per h > (mg/k) + 2L e da
(x,2, y) =$0," ! ', h ! mg
k+ L
%
per h > mg/k. Le configurazioni di equilibrio sono illustrate nelle figure seguenti:
nella seconda delle quali l’ordinata costante h del punto fisso P e stata ridotta al solo scopodi ottenere figure con dimensioni verticali confrontabili — in realta h sarebbe lo stesso inambo i casi.
(b) Stabilita degli equilibri ordinariPoiche il sistema e scleronomo e soggetto soltanto a sollecitazioni posizionali conservative,l’analisi di stabilita degli equilibri ordinari puo essere condotta mediante il teorema diLagrange-Dirichlet e la relativa inversione parziale. A questo scopo, si rende necessariocalcolare le derivate parziali seconde del potenziale. Dalle (485.1) seguono le espressioni:
Uxx(x,2, y) = !k Ux&(x,2, y) =k
2(b cos 2 ! a sin 2) Uxy(x,2, y) = 0
U&&(x,2, y) = !k
2x(b sin 2 + a cos 2) ! k
2y(!b cos 2 + a sin 2) ! k
2h(!a sin 2 + b cos 2)
U&y(x,2, y) =k
2(b sin 2 + a cos 2) Uyy(x,2, y) = !k
che permettono di determinare la matrice hessiana del potenziale in ciascun equilibrioordinario. Le matrici ottenute presentano una struttura relativamente semplice grazie allenote relazioni geometriche:
cos ' =b
2Lsin ' =
a
2L.
Stefano Siboni 2510

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (x,2, y) =$0,!', h ! mg
k! L
%per h ! (mg/k)! 2L > 0
Dopo semplici passaggi algebrici, in questa configurazione la matrice hessiana del potenzialesi riduce a:
H$0,!', h! mg
k! L
%=
/
0001
!k kL 0
kL !kL$mg
k+ L
%0
0 0 !k
2
3334
e risulta definita negativa per il teorema di Sylvester. I tre minori fondamentali dellamatrice valgono infatti:
!k < 0
det
/
1!k kL
kL !kL$mg
k+ L
%
2
4 = k2L$mg
k+ L
%! k2L2 = kLmg > 0
det
/
0001
!k kL 0
kL !kL$mg
k+ L
%0
0 0 !k
2
3334= !k2Lmg < 0
e i loro segni, alternativamente negativo, positivo e ancora negativo, esprimono la con-dizione necessaria e su!ciente per la definitezza negativa della matrice, come a"ermato.Questa circostanza assicura che la configurazione di equilibrio costituisce un massimo re-lativo proprio del potenziale, di cui il teorema di Lagrange-Dirichlet implica la stabilita.
Configurazione (x,2, y) =$0," ! ', h ! mg
k+ L
%per h! (mg/k) > 0
Nella fattispecie la matrice hessiana del potenziale assume la forma
H$0," ! ', h ! mg
k+ L
%=
/
0001
!k ! kL 0
!kL kL$mg
k! L
%0
0 0 !k
2
3334
per via delle relazioni:
Ux& =k
2[b cos(" ! ') ! a sin(" ! ')] =
k
2(!b cos ' ! a sin ') = !kL
U&y =k
2[b sin(" ! ') + a cos(" ! ')] =
k
2(b sin ' ! a cos ') = 0
U&& = !k
2· 0 ! k
2
$h ! mg
k+ L
%[!b cos(" ! ') + a sin(" ! ')]!
! kh
2[!a sin(" ! ') + b cos(" ! ')]
= !k
2
$h ! mg
k+ L
%(b cos ' + a sin ') +
kh
2(a sin ' + b cos ') = kL
$mg
k! L
%.
Stefano Siboni 2511

Universita degli studi di Trento Esercizi di Meccanica razionale
In questo caso, come si verifica facilmente, il teorema di Sylvester non e di alcuna utilita eil segno degli autovalori (tutti reali per la simmetria della matrice) deve essere determinatodirettamente esaminando l’equazione caratteristica:
0 = det
/
0001
!k ! , ! kL 0
!kL kL$mg
k! L
%! , 0
0 0 !k ! ,
2
3334 =
= !(k + ,)-(!k ! ,)
JkL$mg
k! L
%! ,
K! k2L2
.=
= !(k + ,)-!k2L
$mg
k! L
%! kL
$mg
k! L
%, + k, + ,2 ! k2L2
.=
= !(k + ,)J,2 + (k !mgL + kL2), !mgkL
K
vale a dire:0 = !(k + ,)
J,2 + (k !mgL + kL2), ! mgkL
K. (485.4)
Una radice si ottiene eguagliando a zero il binomio , + k e risulta percio sempre negativa:
,3 = !k < 0 .
Le altre due radici (reali) ,1 e ,2 soddisfano l’equazione di secondo grado residua
,2 + (k ! mgL + kL2), ! mgkL = 0
e se ne possono discutere i segni ricordando che
,1,2 = !mgkL < 0
per cui ,1 e ,2 devono avere segno opposto. Ne deriva che la matrice hessiana del potenzialepresenta sempre esattamente un autovalore positivo, e cio basta ad assicurare l’instabilitadella configurazione in virtu del teorema di inversione parziale di Lagrange-Dirichlet.
Esercizio 486. Geometria delle masseUn sistema rigido si compone di una lamina quadrata OABC di lato a e di un’asta rettilineaOD di lunghezza
$2a. Rispetto ad una terna solidale Oxyz l’asta OD si dispone secondo
la bisettrice del terzo quadrante nel piano coordinato Oxy e la sua densita lineare e datada
,(x) =µ$2 a2
(!x) %x " [!a, 0].
Stefano Siboni 2512

Universita degli studi di Trento Esercizi di Meccanica razionale
La lamina OABC coincide invece con il quadrato {(x, y) " [0, a]2} e ha densita areale
&(x, y) =µ
a3(x + y) % (x, y) " [0, a] - [0, a] .
Determinare:
(a) la posizione del baricentro rispetto alla terna Oxyz;(b) la matrice d’inerzia rispetto alla stessa terna;(c) una terna principale d’inerzia in O;(d) il momento d’inerzia rispetto all’asse y = !2x nel piano Oxy;(e) nell’ipotesi che il sistema abbia asse fisso Oz privo di attrito, il valore del parametro
( per cui si ha equilibrio sotto l’azione delle forze:
*FB = e1 + (e2 applicata in B, e*FD = 2e1 agente in D.
Soluzione(a) BaricentroIl baricentro del sistema viene calcolato determinando separatamente i baricentri dell’astaOD e della lamina quadrata OABC e applicando poi il teorema distributivo.
Baricentro dell’astaLa massa dell’asta si ricava per integrazione diretta della densita lineare , sul segmentoOD, ricordando che la massa dell’elemento infinitesimo di asta compreso fra i valori x ex + dx dell’ascissa si scrive:
dm = ,(x)5
dx2 + dx2 = ! µ$2 a2
x$
2 dx = ! µ
a2xdx.
La massa m1 dell’asta vale pertanto:
m1 =06
!a
! µ
a2xdx = ! µ
a2
-x2
2
.0
!a
=µ
2.
Stefano Siboni 2513

Universita degli studi di Trento Esercizi di Meccanica razionale
L’asta si colloca lungo la retta di equazione y = x, z = 0, che quindi ne costituisce unovvio asse di simmetria. Il vettore posizione del suo baricentro assume la forma generale:
G1 ! O = x1e1 + x1e2
in cui l’ascissa x1 e data dall’espressione:
x1 =1
m1
06
!a
xdm =2µ
06
!a
! µ
a2x2 dx = ! 2
a2
-x3
3
.0
!a
= !23a
siccheG1 ! O = !2
3a e1 !
23a e2 .
Baricentro della lamina quadrataLa massa m2 della lamina quadrata segue dall’integrazione della densita areale & sul do-minio OABC :
m2 =a6
0
dx
a6
0
dyµ
a3(x + y) =
µ
a3
a6
0
dx
a6
0
dy (x + y) =
=µ
a3
a6
0
dx
-xy +
y2
2
.a
y=0
=µ
a3
a6
0
dx$xa +
a2
2
%=
µ
a3
-ax2
2+
a2
2x
.a
0
= µ.
Il baricentro G2 della lamina deve collocarsi nel piano coordinato Oxy, evidente piano disimmetria; un asse di simmetria e inoltre identificabile con la bisettrice y = x, consideratal’identita:
&(x, y) =µ
a3(x + y) =
µ
a3(y + x) = &(y, x) % (x, y) " OABC .
Si puo percio scrivere:G2 ! O = x2e1 + x2e2
con ascissa x2 determinata da:
x2 =1
m2
a6
0
dx
a6
0
dy xµ
a3(x + y) =
1µ
µ
a3
a6
0
dx
a6
0
dy (x2 + xy) =
=1a3
a6
0
dx
-x2y + x
y2
2
.a
y=0
=1a3
a6
0
dx$x2a + x
a2
2
%=
1a3
-x3
3a +
x2
2a2
2
.a
0
=712
a .
In definitiva:G2 ! O =
712
a e1 +712
a e2 .
Stefano Siboni 2514

Universita degli studi di Trento Esercizi di Meccanica razionale
Baricentro del sistemaPer determinare il baricentro G del sistema non rimane che applicare la proprieta distribu-tiva alle parti OD e OABC :
G !O =m1(G1 ! O) + m2(G2 ! O)
m1 + m2=
=1
µ
2+ µ
-µ
2
$!2
3a e1 !
23a e2
%+ µ
$ 712
a e1 +712
a e2
%.=
=23
$!1
3+
712
%a (e1 + e2) =
16
a (e1 + e2) .
(b) Matrice d’inerzia rispetto rispetto alla terna OxyzLa matrice d’inerzia viene calcolata sfruttando la proprieta di additivita. L’asta OD e lalamina OABC si intersecano nel solo punto O, che costituisce un insieme tanto di lunghezzaquanto di area nulla — o, piu propriamente, di misura nulla. La matrice d’inerzia delsistema si puo percio calcolare come somma delle matrici d’inerzia dell’asta e della laminarelative alla stessa terna di riferimento Oxyz.
Matrice d’inerzia dell’astaL’asta OD e parametrizzata da
P (x) ! O = x e1 + x e2 , , x " [!a, 0] ,
con elemento infinitesimo di lunghezza ds = |P "(x)| dx =$
2 dx e densita
,(x) = !µx/$
2 a2 , x " [!a, 0] .
Poiche l’asta giace interamente nel piano Oxy, i prodotti d’inerzia di coordinata z sonotutti nulli
Laxz = La
yz = 0
e il momento d’inerzia relativo a Oz e la somma dei momenti d’inerzia calcolati rispettoagli altri due assi coordinati Ox e Oy:
Lazz = La
xx + Layy .
Il momento d’inerzia rispetto a Ox si calcola secondo la definizione:
Laxx =
6
OD
y2, ds =06
!a
x2$! µx$
2 a2
%$2 dx = ! µ
a2
06
!a
x3dx = ! µ
a2
-x4
4
.0
!a
=14µa2
e coincide con quello relativo all’asse Oy:
Layy =
6
OD
x2, ds =06
!a
x2$! µx$
2 a2
%$2 dx = La
xx =14µa2
Stefano Siboni 2515

Universita degli studi di Trento Esercizi di Meccanica razionale
in modo cheLa
zz =14µa2 +
14µa2 =
12µa2 .
L’unico prodotto d’inerzia non banale vale infine:
Laxy = !
6
OD
xy , ds = !06
!a
x2$! µx$
2 a2
%$2 dx = !La
xx = !14µa2 .
La matrice d’inerzia dell’asta diventa cosı:
[LaO] = µa2
/
11/4 !1/4 0!1/4 1/4 0
0 0 1/2
2
4 .
Matrice d’inerzia della laminaSi osserva preliminarmente che la matrice d’inerzia rispetto a Oxyz della lamina deveassumere la forma:
[L(O] =
/
1L(
xx L(xy 0
L(xy L(
yy 00 0 L(
xx + L(yy
2
4
tipica di un qualunque sistema materiale ubicato per intero nel piano coordinato Oxy dellaterna assegnata. Il momento d’inerzia relativo all’asse Ox si ricava dall’integrale doppio:
L(xx =
a6
0
dx
a6
0
dy y2 µ
a3(x + y) =
µ
a3
a6
0
dx
a6
0
dy(xy2 + y3) =
=µ
a3
a6
0
dx
-x
y3
3+
y4
4
.a
y=0
=µ
a3
a6
0
$x
a3
3+
a4
4
%dx =
µ
a3
-x2
2a3
3+
a4
4x
.a
0
=512
µa2 .
Lo stesso valore assume il momento d’inerzia rispetto a Oy, definito da
L(yy =
a6
0
dx
a6
0
dy x2 µ
a3(x + y)
e riconducibile alla forma
L(yy =
a6
0
dy
a6
0
dxy2 µ
a3(y + x) =
a6
0
dx
a6
0
dy x2 µ
a3(x + y) = L(
xx =512
µa2
per mezzo del cambiamento di variabili
(x, y) " [0, a]2 !!!!* (y, x) " [0, a]2
Stefano Siboni 2516

Universita degli studi di Trento Esercizi di Meccanica razionale
che rappresenta la trasformazione di simmetria rispetto alla bisettrice y = x, z = 0, ossiarispetto alla diagonale OB della lamina quadrata. Il prodotto d’inerzia non banalmentenullo e invece dato da:
L(xy = !
a6
0
dx
a6
0
dy xyµ
a3(x + y) = ! µ
a3
a6
0
dx
a6
0
dy (x2y + xy2) =
= ! µ
a3
a6
0
dx
-x2 y2
2+ x
y3
3
.a
y=0
= ! µ
a3
a6
0
$x2 a2
2+ x
a3
3
%dx =
= ! µ
a3
-x3
3a2
2+
x2
2a3
3
.a
0
= !13µa2
in modo che la matrice d’inerzia in Oxyz della lamina risulta:
[L(O] = µa2
/
15/12 !1/3 0!1/3 5/12 0
0 0 5/6
2
4 .
Matrice d’inerzia del sistemaLa somma delle matrici d’inerzia parziali calcolate fornisce la matrice d’inerzia dell’interosistema:
[LO] = [LaO] + [L(
O] = µa2
/
11/4 !1/4 0!1/4 1/4 0
0 0 1/2
2
4+ µa2
/
15/12 !1/3 0!1/3 5/12 0
0 0 5/6
2
4 =
= µa2
/
12/3 !7/12 0
!7/12 2/3 00 0 4/3
2
4 .
(c) Terna principale d’inerzia in OL’individuazione di una terna principale d’inerzia in O del sistema non richiede alcuncalcolo. Basta infatti osservare che:
(i) il sistema giace interamente nel piano coordinato Oxy, che quindi costituisce un ovviopiano di simmetria, principale d’inerzia rispetto ad ogni suo punto. Ne deriva chel’asse Oz e principale d’inerzia in O per il sistema;
(ii) la bisettrice y = x, come gia osservato, costituisce un asse di simmetria per la lamina.Ma e altresı evidente che la stessa retta rappresenta un asse di simmetria anche perl’asta OD, che si colloca lungo di essa. La retta y = x nel piano Oxy e quindi un assedi simmetria del sistema, principale d’inerzia rispetto ad ogni suo punto. Dal momentoche la bisettrice passa per O, si conclude che essa e un asse principale d’inerzia in Odel sistema;
Stefano Siboni 2517

Universita degli studi di Trento Esercizi di Meccanica razionale
(iii) la retta y = !x nel piano Oxy e ortogonale all’asse Oz e alla bisettrice y = x.La simmetria dell’operatore d’inerzia in O assicura che anche la retta y = !x e unasse principale d’inerzia in O del sistema, dovendo necessariamente esistere una ternaprincipale d’inerzia in O.
In definitiva, una terna principale d’inerzia in O del sistema e individuata dalla bisettricey = x del primo e terzo quadrante nel piano Oxy, dalla retta y = !x nello stesso piano edall’asse Oz del riferimento assegnato.
(d) Momento d’inerzia rispetto all’asse y = !2xL’asse di equazione y = !2x, z = 0, passa chiaramente per l’origine ed ammette unaparametrizzazione della forma:
P (+) ! O = + e1 ! 2+ e2 , % + " R
cui corrisponde il versore direttore
n =P "(+)|P "(+)| =
e1 ! 2e2
|e1 ! 2e2|=
e1 ! 2e2$5
=1$5
e1 !2$5
.
Il momento d’inerzia rispetto all’asse y = !2x, z = 0 e quindi dato dalla formula:
IOn = n · LO(n) =1$5(1 ! 2 0)µa2
/
12/3 !7/12 0
!7/12 2/3 00 0 4/3
2
4 1$5
/
11!20
2
4 =
=15
-23· 12 + 2
$! 7
12
%· 1(!2) +
23· (!2)2 +
43· 02
.µa2 =
1715
µa2.
(e) EquilibrioSe il sistema rigido ha asse fisso Oz privo di attrito, condizione necessaria e su!ciente perl’equilibrio e il momento risultante, rispetto allo stesso asse, delle forze attive applicate sianullo. Il momento in O della forza *FB = e1 + ( e2 agente in B(a, a, 0) vale:
(B ! O) # *FB = (a e1 + a e2) # (e1 + ( e2) =
!!!!!!
e1 e2 e3
a a 01 ( 0
!!!!!!= a(( ! 1) e3
mentre quello della forza *FD = 2 e1 applicata in D(!a,!a, 0) risulta:
(D ! O) # *FD = (!a e1 ! a e2) # 2 e1 =
!!!!!!
e1 e2 e3
!a !a 02 0 0
!!!!!!= 2a e3 .
Il momento assiale risultante delle sollecitazioni attive applicate diventa quindi:
[(B ! O) # *FB + (D ! O) # *FD] · e3 = a(( ! 1) + 2a = a(( + 1)
e si annulla se e soltanto se ( = !1.
Stefano Siboni 2518
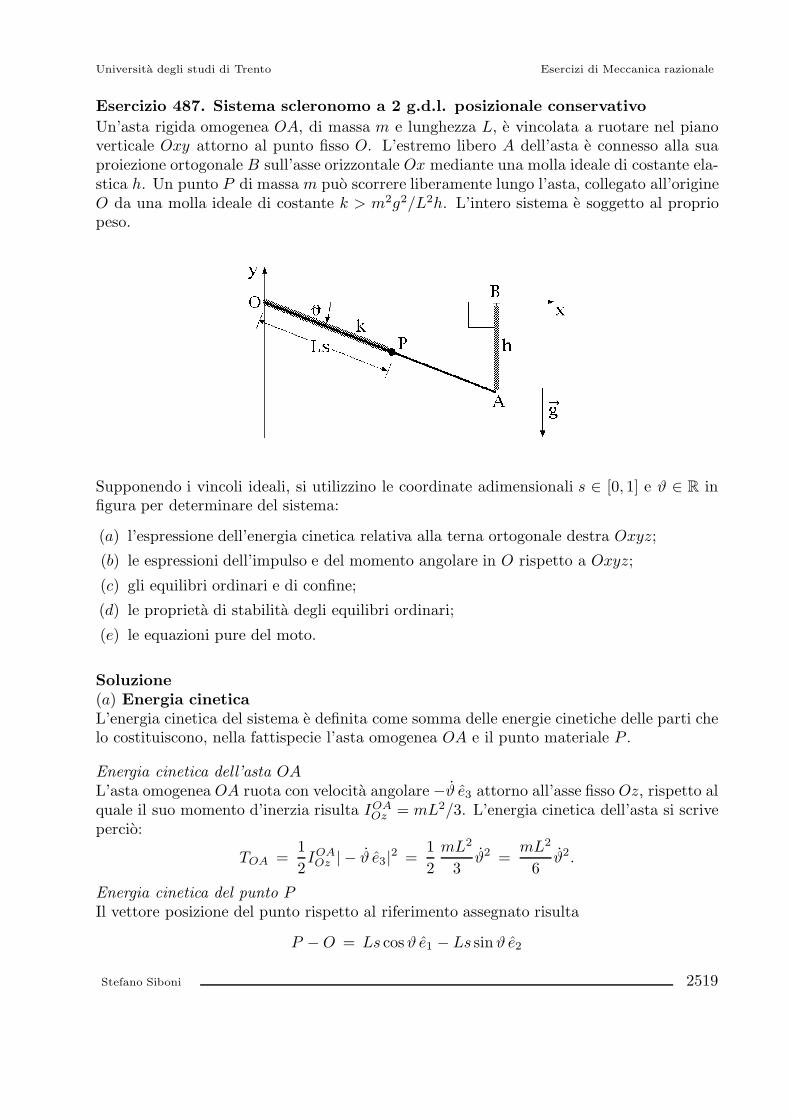
Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 487. Sistema scleronomo a 2 g.d.l. posizionale conservativoUn’asta rigida omogenea OA, di massa m e lunghezza L, e vincolata a ruotare nel pianoverticale Oxy attorno al punto fisso O. L’estremo libero A dell’asta e connesso alla suaproiezione ortogonale B sull’asse orizzontale Ox mediante una molla ideale di costante ela-stica h. Un punto P di massa m puo scorrere liberamente lungo l’asta, collegato all’origineO da una molla ideale di costante k > m2g2/L2h. L’intero sistema e soggetto al propriopeso.
Supponendo i vincoli ideali, si utilizzino le coordinate adimensionali s " [0, 1] e 2 " R infigura per determinare del sistema:
(a) l’espressione dell’energia cinetica relativa alla terna ortogonale destra Oxyz;(b) le espressioni dell’impulso e del momento angolare in O rispetto a Oxyz;(c) gli equilibri ordinari e di confine;(d) le proprieta di stabilita degli equilibri ordinari;(e) le equazioni pure del moto.
Soluzione(a) Energia cineticaL’energia cinetica del sistema e definita come somma delle energie cinetiche delle parti chelo costituiscono, nella fattispecie l’asta omogenea OA e il punto materiale P .
Energia cinetica dell’asta OAL’asta omogenea OA ruota con velocita angolare !2 e3 attorno all’asse fisso Oz, rispetto alquale il suo momento d’inerzia risulta IOA
Oz = mL2/3. L’energia cinetica dell’asta si scrivepercio:
TOA =12IOAOz |! 2 e3|2 =
12
mL2
322 =
mL2
622.
Energia cinetica del punto PIl vettore posizione del punto rispetto al riferimento assegnato risulta
P ! O = Ls cos 2 e1 ! Ls sin 2 e2
Stefano Siboni 2519

Universita degli studi di Trento Esercizi di Meccanica razionale
e la relativa velocita istantanea e data dal vettore
P = L(s cos 2 ! s sin 2 2) e1 ! L(s sin2 + s cos 2 2) e2 (487.1)
con modulo quadrato:
P 2 = L2(s2cos22 + s2sin22 22 ! 2s sin 2 cos 2 s2+
+ s2sin22 + s2cos22 22 + 2s sin 2 cos 2 s2) = L2(s2 + s222) .
Per l’energia cinetica del punto P si ha cosı la relazione:
TP =mL2
2(s2 + s222) .
Energia cinetica del sistemaPer ottenere l’energia cinetica del sistema non rimane che sommare le energie cineticheparziali appena calcolate:
T = TOA + TP =mL2
2
-s2 +
$s2 +
13
%22
..
(b) Impulso e momento angolare in OCome per l’energia cinetica, anche per il calcolo dell’impulso e del momento angolare in Odel sistema si ricorre alla proprieta additiva, sommando i contributi dell’asta e del puntomateriale P .
ImpulsoIl baricentro G dell’asta coincide con il punto medio di questa ed e percio individuato dalvettore posizione:
G !O =A ! O
2=
L
2cos 2 e1 !
L
2sin2 e2
con velocita istantanea relativa a Oxy:
G =$!L
2sin2 e1 ! L
2cos 2 e2
%2 .
L’impulso dell’asta vale dunque:
*QOA = mG = !mL
2(sin 2 e1 + cos 2 e2)2 . (487.2)
La quantita di moto del punto P si calcola invece direttamente secondo la definizione,ricordando l’espressione (487.1) della velocita istantanea:
*QP = mP = mL(s cos 2 ! s sin 2 2) e1 ! mL(s sin2 + s cos 2 2) e2 . (487.3)
Stefano Siboni 2520

Universita degli studi di Trento Esercizi di Meccanica razionale
La somma delle equazioni (487.2) e (487.3) fornisce l’impulso cercato:
*Q = *QOA + *QP =
= !mL
2(sin 2 e1 + cos2 e2)2 + mL(s cos 2 ! s sin 2 2) e1 ! mL(s sin 2 + s cos 2 2) e2 .
Momento angolare in OIl momento angolare in O dell’asta OA si calcola agevolmente osservando che l’asse dirotazione Oz e un asse principale d’inerzia in O del corpo, per cui
*KOAO = LO(!2 e3) = IOA
Oz (!2 e3) =mL2
3(!2 e3) = !mL2
32 e3 .
Per quanto riguarda il punto P , basta applicare la definizione
*KPO = (P ! O) # mP =
= Ls(cos 2 e1 ! sin2 e2) # mL[(s cos 2 ! s sin 2 2)e1 ! (s sin 2 + s cos 2 2)e2] =
= !mL2s22 e3 .
Il momento angolare in O del sistema e dato dalla somma dei momenti angolari parziali:
*KO = *KOAO + *KP
O = !mL2
32 e3 ! mL2s22 e3 =
$!mL2
32 !mL2s22
%e3 .
(c) Equilibri ordinari e di confineIl sistema e scleronomo posizionale conservativo a vincoli ideali e i suoi equilibri, ordinarie di confine, possono essere caratterizzati mediante il potenziale associato alle forze peso ealle interazioni elastiche.
Potenziale delle forze pesoIl baricentro dell’asta omogenea coincide con il punto medio G di questa e la sua posizionee determinata dal vettore:
G !O =A ! O
2=
L
2cos 2 e1 ! L
2sin2 e2 .
Il potenziale gravitazionale e la somma di due termini, l’uno relativo all’asta e l’altro alpunto P :
Ug = !mg e2 · (G ! O) ! mg e2 · (P ! O) =mgL
2sin 2 + mgLs sin2 .
Potenziale delle forze elasticheLe sollecitazioni elastiche agiscono fra i punti P ed O, con costante elastica k, e fra ilpunto A e la proiezione ortogonale B di questo sull’asse Ox, con costante elastica k. Il
Stefano Siboni 2521

Universita degli studi di Trento Esercizi di Meccanica razionale
potenziale elastico complessivo e pari alla somma dei potenziali elastici relativi alle singolemolle ideali:
Uel = !k
2|P ! O|2 ! h
2|A !B|2 = !kL2
2s2 ! hL2
2sin22 .
Potenziale del sistemaLa somma dei potenziali gravitazionale ed elastico definisce il potenziale del sistema, chevale dunque:
U(s,2) = Ug + Uel =mgL
2sin2 + mgLs sin2! kL2
2s2 ! hL2
2sin22 % (s,2) " [0, 1]-R .
Equilibri ordinariGli equilibri ordinari del sistema coincidono con i punti critici del potenziale all’internodel dominio di definizione della parametrizzazione. La condizione di equilibrio e quindiespressa dal sistema di equazioni:'((()
(((*
.U
.s(s,2) = mgL sin2 ! kL2s = 0
.U
.2(s,2) =
mgL
2cos 2 + mgLs cos 2 ! hL2 sin2 cos 2 = 0
% (s,2) " (0, 1) - R .
La prima equazione consente di ricavare il valore di equilibrio di s in funzione di quello di2:
s =mg
kLsin 2 (487.4)
in modo che la seconda condizione per l’equilibrio ordinario diventa:
mgL
2cos 2 +
m2g2
ksin2 cos 2 ! hL2 sin2 cos 2 = 0
ossiamgL
2cos 2 ! hL2
$1 ! m2g2
L2kh
%sin2 cos 2 = 0 .
Due radici, definite incondizionatamente, si ottengono imponendo cos2 = 0:
2 ="
22 = !"
2
mentre altre due vengono ricavate dall’equazione
mgL
2! hL2
$1 ! m2g2
L2kh
%sin2 = 0 ,
sono date da
2 = arcsin-
mg
2hL
$1 ! m2g2
hkL2
%!1.
:= 2) " (0,"/2) 2 = " ! 2)
Stefano Siboni 2522

Universita degli studi di Trento Esercizi di Meccanica razionale
e risultano definite e distinte dalle precedenti a condizione che si abbia
mg
2hL
$1 ! m2g2
hkL2
%!1< 1
— si osservi che per ipotesi deve aversi 1 ! (m2g2/hkL2) > 0. Per sincerarsi che a questeradici in 2 corrispondano e"ettivamente degli equilibri ordinari del sistema occorre cal-colare, tramite la (487.4), i relativi valori di s e imporre che questi siano ricompresinell’intervallo (0, 1). Si ha cosı che:
. (s,2) = (mg/kL,"/2) e un equilibrio ordinario se e solo se mg/kL < 1;
. (s,2) = (!mg/kL,!"/2) non costituisce in nessun caso un equilibrio ordinario delsistema, essendo comunque !mg/kL < 0;
. (s,2) =$mg
kLsin2),2)
%rappresenta un equilibrio ordinario se e solo se sono soddi-
sfatte entrambe le condizioni
mg
2hL
$1 ! m2g2
hkL2
%!1< 1 e
m2g2
2hkL2
$1 ! m2g2
hkL2
%!1< 1 , (487.5)
la seconda delle quali equivale a richiedere che sia 3m2g2/2hkL2 < 1;
. (s,2) =$mg
kLsin2)," ! 2)
%sussiste come equilibrio ordinario nelle stesse condizioni
della configurazione precedente (simmetrica).
Equilibri di confineLe configurazioni di confine del sistema corrispondono alla frontiera del dominio dellaparametrizzazione:
{(s,2) " R2 : s = 0} 0 {(s,2) " R2 : s = 1} ,
che consiste delle rette s = 0 e s = 1.
Retta s = 0Per le configurazioni di confine lungo questa retta il teorema dei lavori virtuali stabiliscela condizione di equilibrio:
.U
.s(0,2) 3s +
.U
.2(0,2) 32 ' 0 % 3s ( 0 % 32 " R
ossia
.U
.s(0,2) = mgL sin2 ' 0
.U
.2(0,2) =
$mgL
2! hL2 sin 2
%cos 2 = 0 . (487.6)
L’equazione porge le possibili soluzioni:
2 = "/2 2 = !"/2 ,
Stefano Siboni 2523

Universita degli studi di Trento Esercizi di Meccanica razionale
sempre definite, e
2 = arcsin$ mg
2hL
%2 = " ! arcsin
$ mg
2hL
%,
definite e distinte dalle precedenti per mg/2hL < 1. Di queste soluzioni, tuttavia, soltanto4 = !"/2 soddisfa la prima disequazione in (487.6) e porge pertanto l’unico equilibrio diconfine:
(s,2) = (0,!"/2) .
Retta s = 1In questo caso il teorema dei lavori virtuali porge la condizione di equilibrio
.U
.s(1,2) 3s +
.U
.2(1,2) 32 ' 0 % 3s ' 0 % 32 " R
che si riduce immediatamente a.U
.s(1,2) = mgL sin2 ! kL2 ( 0
.U
.2(1,2) =
$32mgL! hL2 sin 2
%cos 2 = 0 .
Dall’equazione si deducono due soluzioni definite incondizionatamente:
2 = "/2 2 = !"/2
e due definite e distinte dalle precedenti per 3mg/2hL < 1:
2 = arcsin$3mg
2hL
%2 = " ! arcsin
$3mg
2hL
%.
Dovendo pero essere soddisfatta anche la diseguaglianza di equilibrio, si conclude che:
. (s,2) = (1,"/2) individua un equilibrio di confine se e solo se mg/kL ( 1;
. (s,2) = (1,!"/2) non costituisce un nessun caso un equilibrio di confine del sistema;
. (s,2) = (1, arcsin(3mg/2hL)) e un equilibrio di confine se 3mg/2hL < 1 ed inoltre3m2g2/2hkL2 ( 1;
. (s,2) = (1,"!arcsin(3mg/2hL)) individua un equilibrio di confine per 3mg/2hL < 1e 3m2g2/2hkL2 ( 1, come nella configurazione precedente (simmetrica).
(d) Stabilita degli equilibri ordinariL’analisi di stabilita degli equilibri ordinari di questo sistema posizionale conservativo vienecondotta ricorrendo ai teoremi standard di Lagrange-Dirichlet e di inversione parziale equindi calcolando le derivate parziali seconde del potenziale:
.2U
.s2= !kL2 .2U
.2.s= mgL cos 2
.2U
.s.2= mgL cos2
.2U
.22= !mgL
2sin2 !mgLs sin 2 ! hL2(cos22 ! sin22) ,
ovvero la corrispondente matrice hessiana:
HU (s,2) =
F!kL2 mgL cos2
mgL cos2 !mgL
2sin 2 ! mgLs sin 2 ! hL2(cos22 ! sin22)
G
in ciascun equilibrio ordinario.
Stefano Siboni 2524

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (s,2) = (mg/kL,"/2) per mg/kL < 1In questo caso la matrice hessiana del potenziale assume la forma diagonale:
HU (mg/kL,"/2) =
F!kL2 0
0 !mgL
2! mgL
mg
kL+ hL2
G=
=
F!kL2 0
0 hL2$! mg
2hL! m2g2
hkL2+ 1
%G
e avendo un autovalore negativo (!kL2) il suo carattere definito negativo o indefinitodipende unicamente dal segno del secondo elemento diagonale. La matrice e definita ne-gativa per
! mg
2hL! m2g2
hkL2+ 1 < 0
ossia, ricordando che nelle nostre ipotesi deve aversi 1 ! m2g2/hkL2 > 0, per
1 <mg
2hL
$1 ! m2g2
hkL2
%!1,
nel qual caso l’equilibrio costituisce un massimo proprio del potenziale, stabile per il teo-rema di Lagrange-Dirichlet. Per contro, se
! mg
2hL! m2g2
hkL2+ 1 > 0 1+ 1 >
mg
2hL
$1 ! m2g2
hkL2
%!1
l’hessiana presenta un autovalore positivo e l’equilibrio deve ritenersi instabile per il teo-rema di inversione parziale di Lagrange-Dirichlet. Il caso residuo
! mg
2hL! m2g2
hkL2+ 1 = 0 1+ 1 =
mg
2hL
$1 ! m2g2
hkL2
%!1
vede infine la matrice hessiana risultare semidefinita non definita negativa, per cui ricorreun caso critico di stabilita.
Configurazione$mg
kLsin2),2)
%sotto le condizioni (487.5)
Nella fattispecie, la matrice hessiana di U si scrive:
HU
$mg
kLsin2),2)
%=
=
F !kL2 mgL cos 2)
mgL cos 2) !mgL
2sin 2) ! m2g2
ksin22) ! hL2(cos22) ! sin22))
G
Stefano Siboni 2525

Universita degli studi di Trento Esercizi di Meccanica razionale
con il primo minore fondamentale negativo — !kL2 < 0 — e il determinante di segnopositivo:
det
F !kL2 mgL cos 2)
mgL cos 2) !mgL
2sin 2) ! m2g2
ksin22) ! hL2(cos22) ! sin22))
G=
= kL2
-mgL
2sin2) +
m2g2
ksin22) + hL2(cos22) ! sin22))
.! m2g2L2cos22) =
= khL4
-mg
2hLsin2) +
$1 ! m2g2
khL2
%(cos22) ! sin22))
.=
= khL4$1 ! m2g2
khL2
%- mg
2hL
$1 ! m2g2
khL2
%!1sin2) + cos22) ! sin22)
.=
= khL4$1 ! m2g2
khL2
%-sin 2) sin2) + cos22) ! sin22)
.=
= khL4$1 ! m2g2
khL2
%cos22) > 0
in modo che la matrice risulta definita negativa per il criterio di Sylvester ed individual’equilibrio come un massimo relativo proprio del potenziale, la cui stabilita e assicuratadal teorema di Lagrange-Dirichlet. Quando definito, l’equilibrio risulta stabile.
Configurazione$mg
kLsin2)," ! 2)
%sotto le condizioni (487.5)
Si ha in questo caso:
HU
$mg
kLsin 2)," ! 2)
%=
=
F !kL2 !mgL cos 2)
!mgL cos2) !mgL
2sin2) ! m2g2
ksin22) ! hL2(cos22) ! sin22))
G
e questa matrice hessiana presenta esattamente lo stesso primo minore fondamentale e lostesso determinante gia calcolati per l’equilibrio simmetrico. Anche questa configurazionee stabile per Lagrange-Dirichlet, quale massimo relativo proprio del potenziale di sistema.
(e) Equazioni pure del motoData l’ipotesi dei vincoli ideali e la presenza di forze esclusivamente posizionali conserva-tive, le equazioni pure del moto del sistema si possono scrivere in forma lagrangiana
d
dt
$.L
.s
%! .L
.s= 0
d
dt
$.L
.2
%! .L
.2= 0
con la funzione di Lagrange L = T + U definita da:
L =mL2
2
-s2 +
$s2 +
13
%22
.+
mgL
2sin2 + mgLs sin2 ! kL2
2s2 ! hL2
2sin22 .
Stefano Siboni 2526

Universita degli studi di Trento Esercizi di Meccanica razionale
Con semplici derivazioni, ricordando che le derivate parziali nei binomi di Lagrange vannocalcolate trattando le coordinate s,2 e le velocita generalizzate s, 2 come variabili indipen-denti, si ottengono le espressioni:
.L
.s= mL2s
d
dt
$.L
.s
%= mL2s
.L
.s= mL2s 22 + mgL sin2 ! kL2s
.L
.2= mL2
$s2 +
13
%2
d
dt
$.L
.2
%= mL2
$s2 +
13
%2 + 2mL2ss2
.L
.2=
mgL
2cos 2 + mgLs cos 2 ! hL2 sin2 cos 2
in modo che le equazioni del moto diventano:'(()
((*
mL2s ! mL2s 22 ! mgL sin2 + kL2s = 0
mL2$s2 +
13
%2 + 2mL2ss2 ! mgL
2cos 2 !mgLs cos 2 + hL2 sin2 cos 2 = 0 .
Esercizio 488. Geometria delle masseUn sistema materiale si compone di una curva omogenea ), di massa µ, che rispetto a unaterna Oxyz e parametrizzata da
x = a cos ! y = a sin ! z = 0 , ! " [0,"/2] ,
e da una piastra P ubicata nel piano coordinato Oyz come tratteggiato in figura, condensita
&(y, z) =µ
a3(y + z) % (y, z) " P ,
essendo a una lunghezza costante caratteristica.
Stefano Siboni 2527

Universita degli studi di Trento Esercizi di Meccanica razionale
Determinare:
(a) il baricentro del sistema;(b) la matrice d’inerzia in Oxyz della piastra;(c) la matrice d’inerzia in Oxyz del sistema;(d) il momento d’inerzia del sistema rispetto alla retta y = 0, 3z + 4x = 0;(e) il momento d’inerzia della piastra rispetto alla retta y = 2a, z = 2a.
Soluzione(a) Baricentro del sistemaIl baricentro del sistema viene determinato calcolando le masse e i baricentri della curva) e della piastra P ed applicando quindi la proprieta distributiva. Si noti che l’operazionee perfettamente legittima, in quanto l’intersezione ) 2 P consiste nel solo punto (x, y, z) =(0, a, 0) e risulta percio tanto di lunghezza quanto di area nulla: i sottosistemi ) e P possonoconsiderarsi, di fatto, disgiunti.
Baricentro di )La curva materiale ) e chiaramente un arco di circonferenza di centro O e raggio a, conlunghezza 2"a/4 = "a/2, massa µ e densita costante , = µ("a/2)!1 = 2µ/"a. Laparametrizzazione e quella assegnata
P (!) ! O = a cos ! e1 + a sin ! e2 ! " [0,"/2]
con l’ascissa curvilinea definita dal di"erenziale
ds = |P "(!)| d! = |! a sin ! e1 + a cos ! e2| d! = ad! .
L’ascissa del baricentro G* della curva vale pertanto:
x* =1µ
#/26
0
a cos ! , ds =1µ
#/26
0
a cos !2µ
"aad! =
2a
"
7sin!
8#/2
0=
2a
"
mentre per l’ordinata risulta
y* =1µ
#/26
0
a sin ! , ds =1µ
#/26
0
a sin !2µ
"aad! =
2a
"
#/26
0
sin ! d! =2a
"
7! cos !
8#/2
0=
2a
"
e la quota z* e banalmente nulla per via dell’ovvio piano di simmetria Oxy. Si osserviche la condizione x* = y* segue anche dal ricorrere dell’asse di simmetria y = x nel pianoOxy. Il baricentro della curva materiale e dunque individuato dal vettore posizione
G* ! O =2a
"e1 +
2a
"e2 .
Stefano Siboni 2528

Universita degli studi di Trento Esercizi di Meccanica razionale
Baricentro della piastra PE opportuno riguardare la piastra P come la di"erenza fra la lamina quadrata completa[0, 2a]2 = {(y, z) " [0, 2a] - [0, 2a]} e la lamina quadrata [0, a]2 = {(y, z) " [0, a] - [0, a]},che si puo immaginare rimossa dalla precedente per ottenere P, convenendo di prolungarela densita & all’intera [0, 2a]2 in modo ovvio:
&(y, z) =µ
a3(y + z) % (y, z) " [0, 2a]2 . (488.1)
Si determinano quindi le masse ed i baricentri parziali delle piastre [0, 2a]2 e [0, a]2 perapplicare poi il teorema distributivo.
. Massa di [0, 2a]2La massa della lamina completa [0, 2a]2 si ricava integrando la densita & definita da(488.1) sull’intero dominio quadrato [0, 2a]2:
m2a =2a6
0
dy
2a6
0
dzµ
a3(y + z) =
µ
a3
2a6
0
dy
-yz +
z2
2
.2a
z=0
=µ
a3
2a6
0
(2ay + 2a2)dy =
=µ
a3
-ay2 + 2a2y
.2a
0
=µ
a3(a 4a2 + 2a22a) = 8µ .
. Baricentro di [0, 2a]2Il piano di giacitura Oyz della lamina completa [0, 2a]2 deve contenere anche il relativobaricentro G2a , la cui ascissa e dunque certamente nulla
x2a = 0 .
D’altra parte, l’ordinata e la quota di G2a devono coincidere
y2a = z2a
in quanto % (y, z) " [0, 2a]2 vale (z, y) " [0, 2a]2 e
&(y, z) = &(z, y)
per cui la retta z = y, x = 0, costituisce un asse di simmetria della lamina quadratadi lato 2a. E cosı su!ciente determinare una sola delle due coordinate richieste, peresempio la quota:
z2a =18µ
2a6
0
dy
2a6
0
dz zµ
a3(y + z) =
18a3
2a6
0
dy
2a6
0
dz (yz + z2) =
=1
8a3
2a6
0
dy
-yz2
2+
z3
3
.2a
z=0
=1
8a3
2a6
0
$2a2y +
83a3%dy =
=1
8a3
-a2y2 +
83a3y
.2a
0
=1
8a3
$a24a2 +
83a32a
%=$1
2+
23
%a =
76a
Stefano Siboni 2529

Universita degli studi di Trento Esercizi di Meccanica razionale
per concludere che il vettore posizione del baricentro assume la forma
G2a ! O =76a e2 +
76a e3 .
. Massa di [0, a]2Per la massa della lamina rimossa [0, a]2 si ha l’integrale
ma =a6
0
dy
a6
0
dzµ
a3(y + z) =
µ
a3
a6
0
dy
-yz +
z2
2
.a
z=0
=µ
a3
a6
0
$ya +
a2
2
%dy =
=µ
a3
-y2
2a +
a2
2y
.a
0
=µ
a3
$a3
2+
a3
2
%= µ .
. Baricentro di [0, a]2Anche il baricentro Ga della lamina [0, a]2 deve collocarsi lungo l’asse di simmetriaz = y nel piano Oyz:
&(y, z) = &(z, y) %(y, z) " [0, a]2
ed il suo vettore posizione deve quindi essere del tipo
Ga !O = yae2 + yae3 .
L’ordinata del centro di massa vale peraltro
ya =1µ
a6
0
dy
a6
0
dz yµ
a3(y + z) =
1a3
a6
0
dy
a6
0
dz (y2 + yz) =1a3
a6
0
dy
-y2z + y
z2
2
.a
0
=
=1a3
a6
0
$y2a + y
a2
2
%dy =
1a3
-y3
3a +
y2
2a2
2
.a
0
=1a3
$a4
3+
a4
4
%=
712
a
per cui
Ga ! O =712
a e2 +712
e3 .
La massa della piastra P e chiaramente la di"erenza delle masse m2a e ma :
mP = m2a ! ma = 8µ ! µ = 7µ
e per il baricentro GP della piastra il teorema distributivo porge l’equazione:
mP(GP ! O) + ma(Ga ! O)m2a
= G2a ! O
Stefano Siboni 2530

Universita degli studi di Trento Esercizi di Meccanica razionale
dalla quale segue
GP ! O =m2a(G2a ! O) ! ma(Ga ! O)
mP=
8µ$7
6a e2 +
76a e3
%! µ
$ 712
a e2 +712
a e3
%
7µ
= 8$1
6a e2 +
16a e3
%!$ 1
12a e2 +
112
a e3
%=
54a e2 +
54a e3 .
Baricentro del sistemaPer ricavare il baricentro G del sistema non rimane che applicare la proprieta distributivaalle parti ) e P:
G ! O =m*(G* !O) + mP(GP ! O)
m* + mP=
µ$2a
"e1 +
2a
"e2
%+ 7µ
$54a e2 +
54a e3
%
µ + 7µ=
=18
$ 2"
e1 +2"
e2 + 7 · 54
e2 + 7 · 54
e3
%a =
14"
a e1 +$ 1
4"+
3532
%a e2 +
3532
a e3 .
(b) Matrice d’inerzia della piastraAnche per il calcolo della matrice d’inerzia relativa a Oxyz conviene trattare la piastraP come di"erenza fra la piastra quadrata completa [0, 2a]2 e la piastra quadrata [0, a]2,prolungando la definizione (488.1) della densita areale all’intero dominio quadrato [0, 2a]2.La matrice d’inerzia e quindi pari alla di"erenza fra le matrici d’inerzia, calcolate rispettoalla medesima terna Oxyz, di [0, 2a]2 e [0, a]2. Per brevita, si calcolano direttamente ledi"erenze fra i relativi elementi di matrice, per ciascun momento e prodotto d’inerzia di P.Poiche la piastra giace interamente nel piano Oyz, la matrice d’inerzia di P deve presentarsinella forma generale
[LPO] =
/
01LP
yy + LPzz 0 0
0 LPyy LP
yz
0 LPyz LP
zz
2
34 .
Il momento d’inerzia rispetto all’asse Oy e dato da
LPyy =
6
[0,2a]2
z2& dydz !6
[0,a]2
z2& dydz =
=2a6
0
dy
2a6
0
dz z2 µ
a3(y + z) !
a6
0
dy
a6
0
dz z2 µ
a3(y + z) =
=µ
a3
2a6
0
dy
2a6
0
dz (yz2 + z3) ! µ
a3
a6
0
dy
a6
0
dz (yz2 + z3) =
=µ
a3
2a6
0
dy
-yz3
3+
z4
4
.2a
z=0
! µ
a3
a6
0
dy
-yz3
3+
z4
4
.a
z=0
=
Stefano Siboni 2531

Universita degli studi di Trento Esercizi di Meccanica razionale
=µ
a3
2a6
0
$y
8a3
3+ 4a4
%dy ! µ
a3
a6
0
$ya3
3+
a4
4
%dy =
=µ
a3
-y2
283a3 + 4a4y
.2a
0
! µ
a3
-y2
2a3
3+
a4
4y
.a
0
=
=µ
a3
$163
a5 + 8a5%! µ
a3
$a5
6+
a5
4
%=
403
µa2 ! 512
µa2 =15512
µa2
e coincide con quello relativo all’asse Oz
LPzz =
6
[0,2a]2
y2& dydz !6
[0,a]2
y2& dydz =
=2a6
0
dy
2a6
0
dz y2 µ
a3(y + z) !
a6
0
dy
a6
0
dz y2 µ
a3(y + z) = LP
yy =15512
µa2
grazie al cambiamento di variabili (y, z) " [0, 2a]2 * (z, y) " [0, 2a]2. L’unico prodottod’inerzia non banale vale invece
LPyz = !
6
[0,2a]2
yz & dydz +6
[0,a]2
yz & dydz =
= !2a6
0
dy
2a6
0
dz yzµ
a3(y + z) +
a6
0
dy
a6
0
dz yzµ
a3(y + z) =
= ! µ
a3
2a6
0
dy
2a6
0
dz (y2z + yz2) +µ
a3
a6
0
dy
a6
0
dz (y2z + yz2) =
= ! µ
a3
2a6
0
dy
-y2 z2
2+ y
z3
3
.2a
z=0
+µ
a3
a6
0
dy
-y2 z2
2+ y
z3
3
.a
z=0
=
= ! µ
a3
2a6
0
$y22a2 + y
83a3%
dy +µ
a3
a6
0
$y2 a2
2+ y
a3
3
%dy =
= ! µ
a3
-2a2 y3
3+
83a3 y2
2
.2a
0
+µ
a3
-y3
3a2
2+
y2
2a3
3
.a
0
=
= ! µ
a3
$2a2 8
3a3 +
83a32a2
%+
µ
a3
$a5
6+
a5
6
%=
= !$16
3+
163
%µa2 +
13µa2 =
$13! 32
3
%µa2 = !31
3µa2 .
Stefano Siboni 2532

Universita degli studi di Trento Esercizi di Meccanica razionale
La matrice d’inerzia della piastra P rispetto alla terna Oxyz diventa pertanto:
[LPO] = µa2
/
01155/6 0 0
0 155/12 !31/30 !31/3 155/12
2
34 .
(c) Matrice d’inerzia del sistemaPer determinare la matrice d’inerzia del sistema basta calcolare la matrice d’inerzia inOxyz della curva ) e sommarla a quella della piastra P: la proprieta additiva della matriced’inerzia e infatti applicabile grazie al fatto che l’intersezione P 2 ) consta di un unicopunto e su di essa tutti gli integrali curvilinei e di superficie sono nulli.
Matrice d’inerzia di )
La curva materiale si situa nel piano coordinato Oxy, per cui la relativa matrice d’inerziadeve assumere la forma semplificata
[L*O] =
/
01L*
xx L*xy 0
L*xy L*
yy 00 0 L*
xx + L*yy
2
34 .
Il momento d’inerzia relativo all’asse Ox e dato dall’integrale curvilineo
L*xx =
6
*
y2, ds =
#/26
0
a2sin2!2µ
"aad! =
2"
µa2
#/26
0
sin2! d! =
=2"
µa2
#/26
0
1 ! cos 2!
2d! =
2"
µa2
-!
2! sin 2!
4
.#/2
0
=2"
µa2$"
4! sin "
4
%=
12µa2
e si identifica con quello rispetto all’asse Oy — come peraltro evidente per simmetria —
L*yy =
6
*
x2, ds =
#/26
0
a2cos2!2µ
"aad! =
2"
µa2
#/26
0
cos2! d! =
=2"
µa2
#/26
0
1 + cos 2!
2d! =
1"
µa2
-! +
sin 2!
2
.#/2
0
=12µa2 .
Stefano Siboni 2533

Universita degli studi di Trento Esercizi di Meccanica razionale
Il prodotto d’inerzia relativo agli assi Ox e Oy risulta invece
L*xy = !
6
*
xy, ds = !#/26
0
a cos ! a sin !2µ
"aad! =
= ! 2"
µa2
#/26
0
sin! cos ! d! = ! 2"
µa2
-12sin2!
.#/2
0
= ! 1"
µa2
in modo che la matrice d’inerzia cercata si riduce a
[L*O] = µa2
/
11/2 !1/" 0!1/" 1/2 0
0 0 1
2
4 .
Matrice d’inerzia del sistemaLa matrice d’inerzia del sistema e la somma delle matrici d’inerzia parziali gia calcolate:
[LO] = [L*O] + [LP
O] = µa2
/
11/2 !1/" 0!1/" 1/2 0
0 0 1
2
4+ µa2
/
01155/6 0 0
0 155/12 !31/30 !31/3 155/12
2
34 =
= µa2
/
0179/3 !1/" 0!1/" 161/12 !31/3
0 !31/3 167/12
2
34 .
(d) Momento d’inerzia del sistema rispetto alla retta y = 0, 3z + 4x = 0La retta di equazione y = 0, 3z+4x=0, passa certamente per l’origine O della terna diriferimento ed ammette il versore direttore
n =e1 !
43
e3!!!!e1 !
43
e3
!!!!=
3 e1 ! 4 e3
5=
35
e1 !45
e3 .
Il momento d’inerzia relativo alla retta assegnata On e quindi espresso dalla relazionematriciale
IOn =$3
50 ! 4
5
%µa2
/
0179/3 !1/" 0!1/" 161/12 !31/3
0 !31/3 167/12
2
34
/
13/50
!4/5
2
4 =
Stefano Siboni 2534

Universita degli studi di Trento Esercizi di Meccanica razionale
= µa2$3
50 ! 4
5
%
/
00001
795
! 35"
+12415
!16715
2
33334= µa2
$35· 79
5+
45· 167
15
%=
137975
µa2 .
(e) Momento d’inerzia della piastra rispetto alla retta y = 2a, z = 2aIndicato con A il vertice (y, z) = (2a, 2a) della piastra P, il momento d’inerzia cercato equello relativo alla retta Ax. Considerando le rette parallele Ax, Ox e GPx, il teorema diHuygens-Steiner porge le equazioni:
IPOx = IP
GPx + mP |GP ! O|2
IPAx = IP
GPx + mP |A ! GP |2
che sottratte membro a membro l’una dall’altra conducono alla relazione
IPAx ! IP
Ox = mP |A !GP |2 ! mP |GP ! O|2
e quindi a
IPAx = IP
Ox + mP |A ! GP |2 ! mP |GP ! O|2 =
=1556
µa2 + 7µ
-$2a ! 5
4a%2
+$2a ! 5
4a%2.! 7µ
-$54a%2
+$5
4a%2.
=
=1556
µa2 + 7µa2 98! 7µa2 25
8=
716
µa2
che e il momento d’inerzia richiesto. La figura seguente mostra la mutua collocazione deipunti O, GP e A nel piano Oyz; le distanze fra questi punti rappresentano chiaramente ledistanze fra i corrispondenti assi — ortogonali al piano coordinato Oyz.
Stefano Siboni 2535

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 489. Sistema scleronomo a 2 g.d.l. posizionale conservativoUna guida circolare omogenea ), di massa m, raggio R e centro C , puo ruotare liberamenteattorno al suo punto O nel piano Oxy di una terna inerziale Oxyz. Una molla idealedi costante elastica k = 2mg/R collega C con la sua proiezione ortogonale C) sull’asseorizzontale Ox. Lungo il diametro AB, ortogonale al raggio CO, puo scorrere un puntomateriale P di massa m, connesso a C da una seconda molla di costante h = 4mg/R.L’intero sistema e pesante e i vincoli si assumono ideali.
Si faccia uso dei parametri lagrangiani s " [!1, 1] e 2 " R illustrati in figura per deter-minare del sistema:
(a) gli equilibri ordinari e di confine;
(b) le proprieta di stabilita degli equilibri ordinari;
(c) l’espressione dell’energia cinetica;
(d) le equazioni di Lagrange del moto;
(e) le espressioni di impulso e momento angolare in O.
Soluzione(a) Equilibri ordinari e di confineLe forze che agiscono su questo sistema scleronomo a vincoli ideali sono tutte posizionali econservative: il peso e le interazioni elastiche associate alle molle C!P e C!C). E quindidefinito un potenziale del sistema, dato dalla somma di un potenziale gravitazionale e diun potenziale elastico.
Potenziale gravitazionaleLa guida circolare omogenea ) ha nel proprio centro C un ovvio centro di simmetria, chedunque va identificato con il baricentro. Il potenziale delle forze peso e dunque la somma
Stefano Siboni 2536

Universita degli studi di Trento Esercizi di Meccanica razionale
di un termine relativo alla guida e di uno relativo al punto materiale:
Ug = !mg e2 · (C ! O) ! mg e2 · (P ! O) .
Il centro della guida e individuato dal vettore posizione
C !O = R sin 2 e1 ! R cos 2 e2
mentre per il punto P si ha
P ! O = P ! C + C ! O = Rs cos 2 e1 + Rs sin 2 e2 + R sin 2 e1 ! R cos 2 e2 == R(s cos 2 + sin2) e1 + R(s sin 2 ! cos 2) e2 .
(489.1)Il potenziale gravitazionale diventa pertanto:
Ug = mgR cos 2 ! mgR(s sin 2 ! cos 2) = 2mgR cos 2 ! mgRs sin 2 .
Potenziale elasticoIl potenziale elastico del sistema e dato da
Uel = !k
2|C ! C)|2 ! h
2|P ! C |2 = !mg
R|C !C)|2 ! 2mg
R|P ! C |2 =
= !mg
R|R cos 2|2 ! 2mg
R|Rs|2 = !mgRcos22 ! 2mgRs2 .
Potenziale del sistemaLa somma dei potenziali parziali calcolati fornisce il potenziale del sistema:
U(s,2) = 2mgR cos 2 ! mgRs sin 2 ! mgRcos22 ! 2mgRs2 =
= mgR(2 cos 2 ! s sin 2 ! cos22 ! 2s2) % (s,2) " [!1, 1]- R .
Equilibri ordinariGli equilibri ordinari del sistema sono tutti e soli i punti critici del potenziale ricompresinella striscia aperta di R2:
{(s,2) " R2, : !1 < s < 1}
e si ottengono quindi risolvendo sullo stesso dominio aperto il sistema di equazioni:'(()
((*
.U
.s= mgR(! sin2 ! 4s) = 0
.U
.2= mgR(!2 sin2 ! s cos 2 + 2 cos 2 sin 2) = 0
che equivale a D! sin2 ! 4s = 0!2 sin2 ! s cos 2 + 2 cos 2 sin 2 = 0 .
(489.2)
Stefano Siboni 2537

Universita degli studi di Trento Esercizi di Meccanica razionale
Dalla prima delle equazioni (489.2) si deduce la relazione
s = !14
sin2 ,
che sostituita nella seconda porge
!2 sin2 +14
sin2 cos 2 + 2 cos 2 sin 2 = 0
ossiasin 2
$!8
9+ cos 2
%= 0 .
in modo che i valori di equilibrio della variabile angolare risultano:
2 = 0 2 = " 2 = arccos(8/9) 2 = !arccos(8/9)
I corrispondenti valori della coordinata s sono s = 0 per i primi due angoli e
s = !14
sin[arccos(8/9)] = !14
51 ! (8/9)2 = !
$17
36s = +
$17
36
per i due rimanenti. Ne deriva che le configurazioni di equilibrio del sistema sono leseguenti:
(s,2) = (0, 0) (s,2) = (0,")
(s,2) =$!$
17/36, arccos(8/9)%
(s,2) =$$
17/36,!arccos(8/9)%
.
Equilibri di confineLe configurazioni di confine del sistema sono individuate dalle coppie di valori delle coor-dinate lagrangiane del tipo
{(s,2) = (!1,2) : 2 " R} e {(s,2) = (+1,2) : 2 " R} .
I due insiemi, che rappresentano rispettivamente il bordo inferiore e quello superiore dellastriscia {(s,2) " R2 : !1 ' s ' 1}, vengono esaminati separatamente.
(i) Configurazioni (s,2) = (!1,2)Il teorema dei lavori virtuali a"erma che una configurazione di questo tipo e di equilibrioper il sistema se e solo se:
.U
.s(!1,2) 3s +
.U
.2(!1,2) 32 ' 0 % 3s ( 0 , % 32 " R
ossia.U
.s(!1,2) ' 0
.U
.2(!1,2) = 0
Stefano Siboni 2538

Universita degli studi di Trento Esercizi di Meccanica razionale
e quindi
mgR(! sin 2 + 4) ' 0 mgR(!2 sin 2 + cos 2 + 2 cos 2 sin 2) = 0 .
La prima condizione non puo mai essere soddisfatta con 2 " R, per cui questo tratto difrontiera non accoglie alcuna configurazione di equilibrio.
(ii) Configurazioni (s,2) = (1,2)Nella fattispecie la condizione di equilibrio prescritta dal teorema dei lavori virtuali e
.U
.s(1,2) 3s +
.U
.2(1,2) 32 ' 0 % 3s ' 0 , % 32 " R
e si riduce a.U
.s(1,2) ( 0
.U
.2(1,2) = 0
ovvero a
mgR(! sin 2 ! 4) ( 0 mgR(!2 sin 2 ! cos 2 + 2 cos 2 sin 2) = 0 .
Anche in questo caso la prima delle condizioni di equilibrio non e mai soddisfatta. Pertanto,neppure lungo questo tratto di frontiera sono presenti configurazioni di equilibrio.
(b) Stabilita degli equilibri ordinariLe proprieta di stabilita degli equilibri ordinari di questo sistema scleronomo posizionaleconservativo si possono analizzare con i teoremi di Lagrange-Dirichlet e di inversioneparziale. Per far questo e necessario determinare le derivate parziali seconde del potenziale:
.2U
.s2(s,2) = !4mgR
.2U
.2.s(s,2) = !mgR cos 2
.2U
.s.2(s,2) = !mgR cos 2
.2U
.22(s,2) = mgR(!2 cos 2 + s sin 2 + 2cos22 ! 2sin22)
che definiscono la matrice hessiana di U :
HU (s,2) = mgR
+!4 ! cos 2
! cos 2 !2 cos 2 + s sin 2 + 2cos22 ! 2sin22
,.
Configurazione (s,2) = (0, 0)In questa configurazione la matrice hessiana del potenziale assume la forma
HU (0, 0) = mgR
+!4 !1!1 0
,
ed e indefinita per via del segno negativo del suo determinante:
detHU (0, 0) = !(mgR)2 .
Stefano Siboni 2539

Universita degli studi di Trento Esercizi di Meccanica razionale
L’equilibrio e dunque instabile per l’inversione parziale del teorema di Lagrange-Dirichlet.
Configurazione (s,2) = (0,")La matrice hessiana del potenziale e in questo caso
HU (0,") = mgR
+!4 11 4
,
ma risulta ancora indefinita a causa del determinante negativo
detHU (0,") = !17(mgR)2
ed assicura l’instabilita dell’equilibrio in virtu del teorema di inversione parziale di Lagran-ge-Dirichlet.
Configurazione (s,2) =$!$
17/36, arccos(8/9)%
Nella fattispecie la matrice hessiana del potenziale diventa:
HU
$!$
1736
, arccos$8
9
%%= mgR
+!4 !8/9
!8/9 !217/324
,
ed e definita negativa in forza del teorema di Sylvester:
!4 < 0 det+
!4 !8/9!8/9 !217/324
,=
179
> 0
ovvero per via dei segni di determinante e traccia:
detHU
$!$
1736
, arccos$8
9
%%=
179
(mgR)2 > 0
trHU
$!$
1736
, arccos$8
9
%%= !1513
324mgR < 0 .
La configurazione di equilibrio costituisce percio un massimo relativo proprio del potenzialee deve reputarsi stabile per il teorema di Lagrange-Dirichlet.
Configurazione (s,2) =$$
17/36,!arccos(8/9)%
La matrice hessiana del potenziale coincide con quella calcolata nella configurazione prece-dente
HU
$$1736
,!arccos$8
9
%%= mgR
+!4 !8/9
!8/9 !217/324
,
e conduce alle stesse conclusioni circa la stabilita dell’equilibrio. Da notare che il risultatoera atteso, in quanto le due configurazioni (s,2) =
$!$
17/36, arccos(8/9)%
e (s,2) =
Stefano Siboni 2540

Universita degli studi di Trento Esercizi di Meccanica razionale
$$17/36,!arccos(8/9)
%sono simmetriche rispetto all’origine (s,2) = (0, 0), mentre il
potenziale si presenta come una funzione pari:
U(!s,!2) = U(s,2) % (s,2) " [!1, 1]- R .
(c) Energia cineticaL’energia cinetica del sistema e la somma dei contributi relativi alla guida circolare ) e alpunto materiale P .
Energia cinetica della guida circolareLa guida ) ruota con velocita angolare 2 e3 attorno all’asse fisso Oz ed il suo momentod’inerzia rispetto allo stesso asse e calcolabile direttamente mediante il teorema di Huygens-Steiner:
I*Oz = I*
Cz + m|C ! O|2 = mR2 + mR2 = 2mR2.
L’energia cinetica vale cosı:
T* =12I*Oz|2 e3|2 =
12
2mR2 22 = mR222 .
Energia cinetica del punto PLa velocita istantanea del punto P si ricava derivando rispetto al tempo il vettore posizione(489.1), in cui s e 2 sono riguardate come funzioni regolari di t:
P = R(s cos 2 ! s sin 2 2 + cos 2 2) e1 + R(s sin 2 + s cos 2 2 + sin2 2) e2 . (489.3)
Il modulo quadrato della velocita e quindi
P 2 = R2(s cos 2 ! s sin 2 2 + cos 2 2)2 + R2(s sin 2 + s cos 2 2 + sin2 2)2 =
= R2(s2cos22 + s2sin22 22 + cos22 22 ! 2s sin 2 cos 2 s2 + 2cos22 s2 ! 2s sin 2 cos 2 22
+ s2sin22 + s2cos22 22 + sin22 22 + 2s sin 2 cos 2 s2 + 2sin22 s2 + 2s sin 2 cos 2 22)
= R2(s2 + s222 + 22 + 2s2)
per cui l’energia cinetica del punto materiale si riduce a
TP =m
2P 2 =
mR2
2(s2 + s222 + 22 + 2s2) .
Energia cinetica del sistemaSommando le energie cinetiche di guida ed asta si perviene all’energia cinetica del sistema:
T = T* + TP = mR222 +mR2
2(s2 + s222 + 22 + 2s2) =
mR2
2(s2 + s222 + 322 + 2s2).
Stefano Siboni 2541

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Equazioni di LagrangeIl sistema e per ipotesi olonomo, a vincoli ideali e soggetto soltanto a sollecitazioni posizionaliconservative. Le equazioni pure del moto possono quindi essere espresse in forma lagrangiana
d
dt
$.L
.s
%! .L
.s= 0
d
dt
$.L
.2
%! .L
.2= 0
con il potenziale cinetico L = T + U dato da:
L =mR2
2(s2 + s222 + 322 + 2s2) + mgR(2 cos 2 ! s sin 2 ! cos22 ! 2s2) .
Ricordando che nel calcolo dei binomi di Lagrange a primo membro le derivate parziali vannodeterminate trattando le variabili s,2, s, 2 come indipendenti, si hanno le relazioni:
.L
.s= mR2(s + 2)
d
dt
$.L
.s
%= mR2(s + 2)
.L
.s= mR2s22 + mgR(! sin2 ! 4s)
.L
.2= mR2(s22 + 32 + s)
d
dt
$.L
.2
%= mR2(s22 + 2ss2 + 32 + s)
.L
.2= mgR(!2 sin 2 ! s cos 2 + 2 cos 2 sin 2) .
Ne seguono le equazioni pure del moto:')
*mR2(s + 2) ! mR2s22 + mgR(sin2 + 4s) = 0
mR2(s22 + 2ss2 + 32 + s) !mgR(!2 sin 2 ! s cos 2 + 2 cos 2 sin 2) = 0 .
(e) Quantita di moto e momento angolare in OL’impulso e il momento angolare in O del sistema vengono calcolati per mezzo della pro-prieta additiva di queste grandezze, che sono definite come somma dei contributi della guidacircolare e del punto materiale P .
Quantita di motoLa quantita di moto della guida circolare ) si ottiene moltiplicandone la massa m per lavelocita istantanea del baricentro C :
*Q* = mC = mR(cos 2 e1 + sin2 e2)2
Per quanto riguarda il punto P , basta moltiplicare per la massa m ambo i membri della(489.3):
*QP = mP = mR(s cos 2 ! s sin 2 2 + cos 2 2) e1 + mR(s sin2 + s cos 2 2 + sin 2 2) e2 .
Stefano Siboni 2542

Universita degli studi di Trento Esercizi di Meccanica razionale
La somma dei due termini parziali conduce al risultato richiesto:
*Q = *Q* + *QP =mR(cos 2 e1 + sin2 e2)2+
+mR(s cos 2 ! s sin 2 2 + cos 2 2) e1 + mR(s sin 2 + s cos 2 2 + sin2 2) e2 .
Momento angolare nel polo OIl momento angolare in O della guida circolare si ricava immediatamente, osservando chela guida ruota con velocita angolare 2 e3 attorno all’asse fisso Oz, che detto asse fisso eprincipale d’inerzia in O per la guida e che il momento d’inerzia rispetto allo stesso asse eI*Oz:
*K*O = L*
O(2 e3) = I*Oz2 e3 = 2mR22 e3 ,
espressione nella quale si e indicato con L*O l’operatore d’inerzia in O di ). Per il punto P
la definizione del momento angolare in O porge l’espressione:
*KPO = (P ! O) # mP =
7R(s cos 2 + sin2) e1 + R(s sin 2 ! cos 2) e2
8#
# m7R(s cos 2 ! s sin 2 2 + cos 2 2) e1 + R(s sin2 + s cos 2 2 + sin 2 2) e2
8=
= mR27(s cos 2 + sin2)(s sin 2 + s cos 2 2 + sin2 2)!
! (s sin 2 ! cos 2)(s cos 2 ! s sin 2 2 + cos 2 2)8e3 =
= mR2(s22 + s + 2) e3 .
Sommando i momenti angolari di guida e punto materiale si perviene al momento angolarein O dell’intero sistema:
*KO = *K*O + *KP
O = 2mR22 e3 + mR2(s22 + s + 2) e3 = mR2(s22 + s + 32) e3 .
Esercizio 490. Analisi lineare della stabilita nel pianoSi consideri il sistema di equazioni di"erenziali nel piano Oxy:
Dx = x2 ! y2
y = !6x + 2xy ! 8 .
Si chiede di determinare:
(a) le soluzioni costanti (punti fissi) del sistema;(b) le proprieta di stabilita delle soluzioni costanti.
Soluzione(a) Punti fissiI punti fissi del sistema sono le soluzioni costanti e vanno percio identificati con le radici(x, y) del sistema di equazioni algebriche non lineari:
Dx2 ! y2 = 0!6x + 2xy ! 8 = 0
(x, y) " R2 . (490.1)
Stefano Siboni 2543

Universita degli studi di Trento Esercizi di Meccanica razionale
Dalla prima equazione si deducono due possibili espressioni per la variabile y in funzionedella x:
y = x y = !x .
Nel primo caso la seconda equazione di equilbrio (490.1) diventa
!6x + 2x2 ! 8 = 0ossia
x2 ! 3x ! 4 = 0
ed ammette percio le radici
x =3 ±
59 ! 4 · (!4)
2=
3 ± 52
=3
4
4
!1che definiscono i punti fissi
(x, y) = (!1,!1) (x, y) = (4, 4) . (490.2)
Nel secondo caso si ha invece la condizione di equilibrio su x:
!6x ! 2x2 ! 8 = 0e quindi
x2 + 3x + 4 = 0
da cui seguono le radici complesse:
x =!3±
$9 ! 4 · 42
=!3 ± i
$7
2
che non corrispondono ad alcun punto fisso del sistema. I soli punti fissi sono pertanto gli(490.2).
(b) Stabilita dei punti fissiIl sistema di equazioni di"erenziali e scritto in forma normale del primo ordine, con i secondimembri di classe C1 in R2. La stabilita dei punti fissi puo dunque essere studiata ricorrendoal teorema di analisi lineare. La matrice jacobiana della funzione a secondo membro vale
J(x, y) =+
2x !2y!6 + 2y 2x
,
e se ne deve specializzare la forma in ciascuno dei due punti fissi.
Punto fisso (x, y) = (!1,!1)La matrice jacobiana del secondo membro diventa in questo caso
J(!1,!1) =+
!2 2!6 ! 2 !2
,=+!2 2!8 !2
,
Stefano Siboni 2544

Universita degli studi di Trento Esercizi di Meccanica razionale
ed i suoi autovalori si ottengono risolvendo l’equazione caratteristica
0 = det[J(!1,!1) ! ,I] =+!2! , 2!8 !2 ! ,
,= (, + 2)2 + 16
che porge le radici complesse coniugate
, = !2 ± 4i .
La parte reale di tutti gli autovalori e nagativa, per cui il punto fisso deve ritenersi asintot-icamente stabile.
Punto fisso (x, y) = (4, 4)Nella fattispecie, per la matrice jacobiana del secondo membro si ha l’espressione
J(4, 4) =+
8 !8!6 + 8 8
,=+
8 !82 8
,.
La relativa equazione caratteristica risulta
0 = det[J(4, 4) ! ,I] = det+
8 ! , !82 8 ! ,
,= (, ! 8)2 + 16
ed individua gli autovalori complessi coniugati:
, = 8 ± 4i .
Il segno positivo della parte reale garantisce l’instabilita del punto fisso — un solo autovalorecon parte reale positiva e su!ciente ad assicurare l’instabilita del punto fisso.
Esercizio 491. Analisi di WeierstrassUn punto materiale di massa m puo scorrere senza attrito lungo l’asse Ox di una ternainerziale ed e soggetto ad una forza posizionale di potenziale:
U(x) = wa2 x2 + a2
x4 + 8a4, x " R ,
essendo a e w due costanti positive aventi le dimensioni di una lunghezza e di un’energia,rispettivamente. Si vogliono determinare:
(a) le equazioni del moto e le condizioni iniziali corrispondenti ai moti periodici;(b) le condizioni iniziali relative ai moti a meta asintotica;(c) il ritratto di fase del sistema;(d) gli equilibri, le loro proprieta di stabilita e il periodo delle piccole oscillazioni nell’intorno
di quelli stabili.
Stefano Siboni 2545

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Equazioni del moto e condizioni iniziali per i moti periodiciL’equazione del moto del sistema e data da
mx = U "(x)
ossiamx = wa2!2x5 ! 4a2x3 + 16a4x
(x4 + 8a4)2%x " R .
Le condizioni iniziali relative ai moti periodici del sistema si possono determinare ricorrendoall’analisi di Weierstrass, in quanto il sistema e scleronomo, unidimensionale e soggettoesclusivamente a sollecitazioni posizionali (conservative). A tale scopo si considera l’energiapotenziale
W (x) = !U(x) = !wa2 x2 + a2
x4 + 8a4%x " R
con la derivata prima
W "(x) = wa2 2x5 + 4a2x3 ! 16a4x
(x4 + 8a4)2%x " R
e la derivata seconda
W ""(x) = wa2(2x5 + 4a2x3 ! 16a4x)d
dx
-1
(x4 + 8a4)2
.+ wa2 10x4 + 12a2x2 ! 16a4
(x4 + 8a4)2.
Gli equilibri del sistema si ricavano annullando la derivata prima dell’energia potenziale:
wa2 2x5 + 4a2x3 ! 16a4x
(x4 + 8a4)2= 0
ossia risolvendo l’equazione algebrica
x5 + 2a2x3 ! 8a4x = 0
che ammette l’ovvia radice x = 0. Ulteriori soluzioni si ottengono dall’equazione biquadra-tica
x4 + 2a2x2 ! 8a4 = 0
che implica
x2 =!2a2 ±
54a4 ! 4 · (!8a4)
2=
!2a2 ±$
36a4
2=
!2a2 ± 6a2
2=
3
4
2a2
!4a2
e fornisce dunque le radici reali:
x =$
2a x = !$
2a .
Stefano Siboni 2546
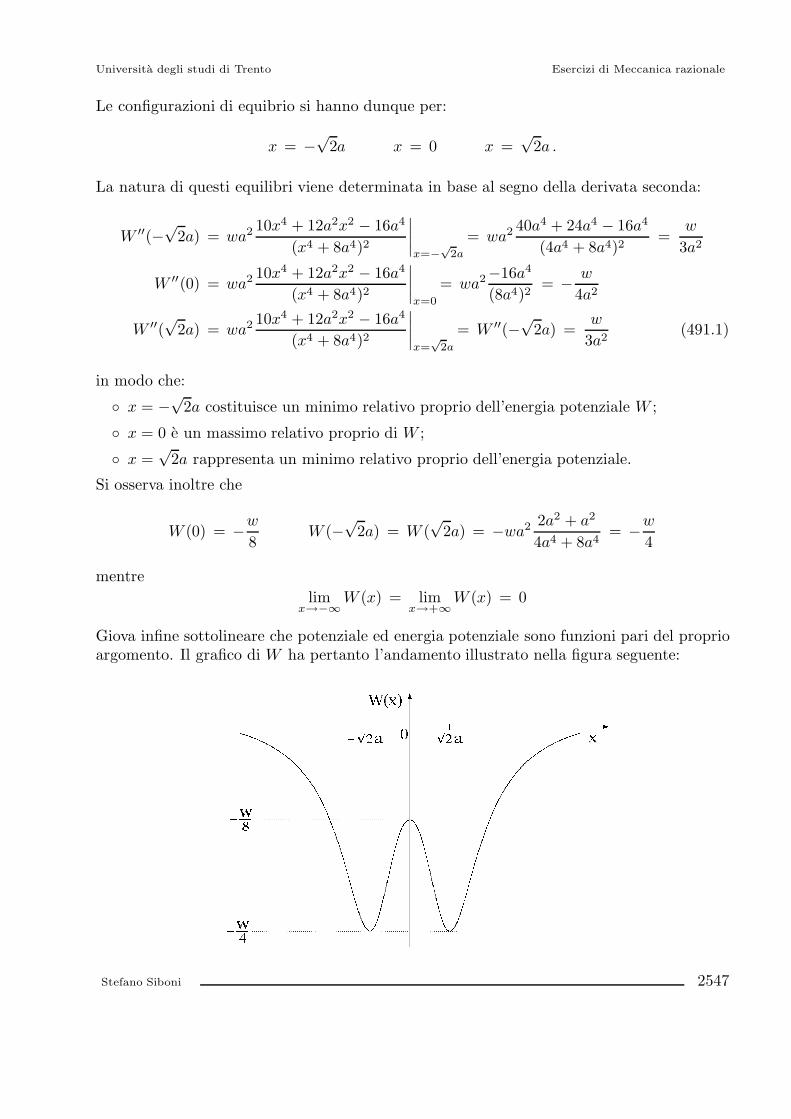
Universita degli studi di Trento Esercizi di Meccanica razionale
Le configurazioni di equibrio si hanno dunque per:
x = !$
2a x = 0 x =$
2a .
La natura di questi equilibri viene determinata in base al segno della derivata seconda:
W ""(!$
2a) = wa2 10x4 + 12a2x2 ! 16a4
(x4 + 8a4)2
!!!!x=!
#2a
= wa2 40a4 + 24a4 ! 16a4
(4a4 + 8a4)2=
w
3a2
W ""(0) = wa2 10x4 + 12a2x2 ! 16a4
(x4 + 8a4)2
!!!!x=0
= wa2!16a4
(8a4)2= ! w
4a2
W ""($
2a) = wa2 10x4 + 12a2x2 ! 16a4
(x4 + 8a4)2
!!!!x=
#2a
= W ""(!$
2a) =w
3a2(491.1)
in modo che:
. x = !$
2a costituisce un minimo relativo proprio dell’energia potenziale W ;
. x = 0 e un massimo relativo proprio di W ;
. x =$
2a rappresenta un minimo relativo proprio dell’energia potenziale.
Si osserva inoltre che
W (0) = !w
8W (!
$2a) = W (
$2a) = !wa2 2a2 + a2
4a4 + 8a4= !w
4
mentrelim
x$!%W (x) = lim
x$+%W (x) = 0
Giova infine sottolineare che potenziale ed energia potenziale sono funzioni pari del proprioargomento. Il grafico di W ha pertanto l’andamento illustrato nella figura seguente:
Stefano Siboni 2547

Universita degli studi di Trento Esercizi di Meccanica razionale
Da esso si evince, usando i criteri di Weierstrass, che i moti periodici del sistema ricorronoper tutte e sole le condizioni iniziali ricomprese nell’insieme
H(x, x) " R2 : !w
4< H(x, x) < !w
8
I0H(x, x) " R2 : !w
8< H(x, x) < 0
I
essendo H(x, x) l’energia meccanica — conservata — del sistema:
H(x, x) =m
2x2 !wa2 x2 + a2
x4 + 8a4.
(b) Condizioni iniziali per i moti a meta asintoticaApplicando i criteri di Weierstrass, dal grafico di W (x) si deduce immediatamente che lecondizioni iniziali corrispondenti ai moti a meta asintotica sono tutte e sole quelle in cuil’energia meccanica assume il valore W (0) = !w/8, escluso il punto di equilibrio (x, x) =(0, 0): H
(x, x) " R2 : H(x, x) = !w
8, x &= 0
I.
(c) Ritratto di fase del sistemaE facile tracciare il ritratto di fase del sistema, una volta individuati i seguenti livelli dienergia notevoli:
. E0 = W ($
2a) = !w/4 individua gli stati di quiete nelle configurazioni di equilibriostabili x =
$2a e x = !
$2a;
. E1 " (!w/4,!w/8) corrisponde a due moti periodici, il primo localizzato nel semiassenegativo delle x e il secondo nel semiasse positivo;
. E2 = W (0) = !w/8 e associato allo stato di quiete nella posizione di equilibrio instabilex = 0 e a due moti a meta asintotica tanto nel passato quanto nel futuro, l’uno ubicatonella semiretta {x < 0} e l’altro nella semiretta {x > 0}. Entrambi i moti asintoticihanno meta asintotica in x = 0; le corrispondenti traiettorie nel piano delle fasi sonocurve omocline;
. per E3 " (!w/8, 0) si ottiene un unico moto periodico, la cui traiettoria — chiusa —nel piano delle fasi circonda tutti e tre i punti fissi;
. E4 = 0 e il livello di energia corrispondente a limx$+% W (x) = limx$!% W (x).L’assenza di intersezioni fra il grafico di W (x) e la retta orizzontale corrispondenteal livello E4 — l’asse delle ascisse — comporta che i moti si svolgano sull’intero asse xe siano indefinitamente progressivi o retrogradi secondo il segno della velocita inizialex. La conservazione dell’energia meccanica comporta tuttavia che, lungo la traiettoria,si abbia
limx$+%
x2 = limx$+%
! 2m
W (x) = 0 limx$!%
x2 = limx$!%
! 2m
W (x) = 0
per cui le curve di fase devono tendere asintoticamente all’asse x — che ne costituisce,dunque, un asintoto orizzontale;
Stefano Siboni 2548
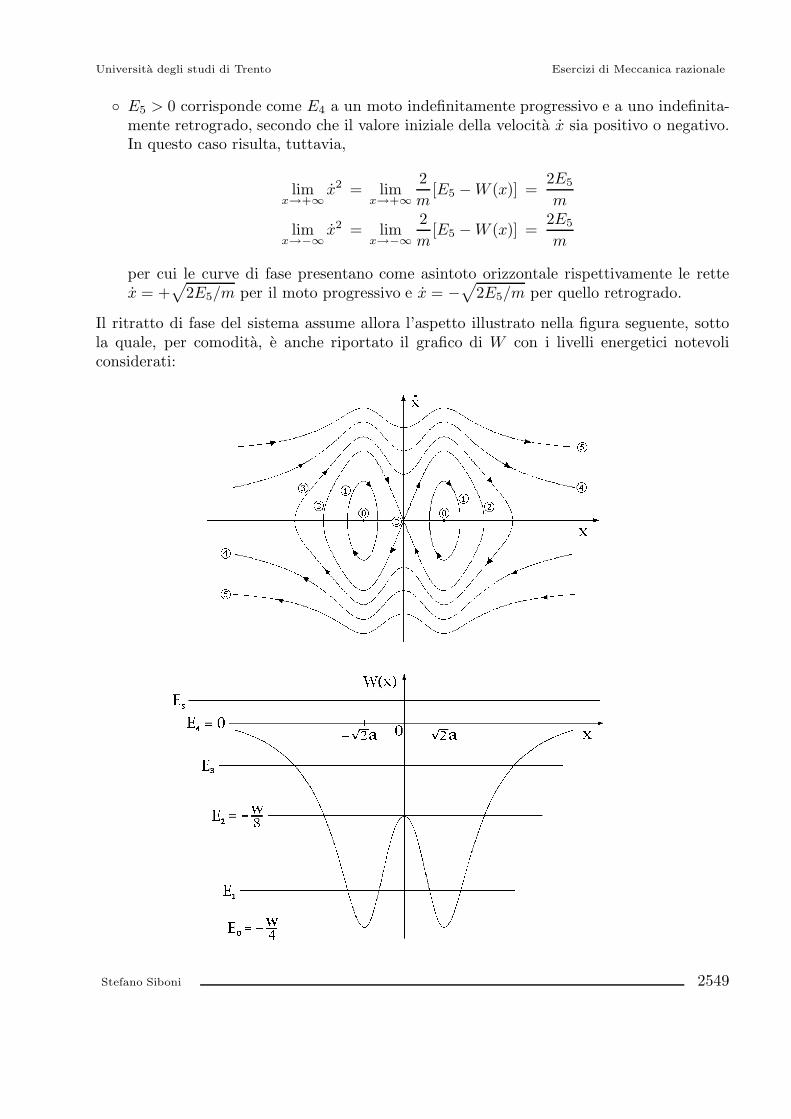
Universita degli studi di Trento Esercizi di Meccanica razionale
. E5 > 0 corrisponde come E4 a un moto indefinitamente progressivo e a uno indefinita-mente retrogrado, secondo che il valore iniziale della velocita x sia positivo o negativo.In questo caso risulta, tuttavia,
limx$+%
x2 = limx$+%
2m
[E5 ! W (x)] =2E5
m
limx$!%
x2 = limx$!%
2m
[E5 ! W (x)] =2E5
m
per cui le curve di fase presentano come asintoto orizzontale rispettivamente le rettex = +
52E5/m per il moto progressivo e x = !
52E5/m per quello retrogrado.
Il ritratto di fase del sistema assume allora l’aspetto illustrato nella figura seguente, sottola quale, per comodita, e anche riportato il grafico di W con i livelli energetici notevoliconsiderati:
Stefano Siboni 2549

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Equilibri, stabilita e periodo delle piccole oscillazioniL’analisi di Weierstrass ha gia evidenziato che le configurazioni di equilibrio x = !
$2a e
x =$
2a sono stabili secondo Liapunov, mentre l’equilibrio x = 0 e instabile. Poiche ilpotenziale e una funzione pari di x:
U(!x) = U(x) %x " R ,
il periodo delle piccole oscillazioni deve essere lo stesso nelle configurazioni di equilibriosimmetriche x = !
$2a e x = +
$2a e bastera percio esaminarne una soltanto. L’equazione
del moto mx = U "(x) nell’intorno di x =$
2a si linearizza in
mx = U ""($
2a)(x !$
2a)
e ricordando la (491.1) diventa
mx = ! w
3a2(x !
$2a)
ossiax +
w
3ma2(x !
$2a) = 0
che e l’equazione di un oscillatore armonico semplice di pulsazione
# ="
w
3ma2.
Il periodo delle piccole oscillazioni vale pertanto, in entrambi gli equilibri,
T =2"
#= 2"
"3ma2
w.
Esercizio 492. Sistema scleronomo a 1 g.d.l. non conservativoUna circonferenza omogenea pesante ), di massa m, centro C , raggio r e passante perl’origine O di una terna cartesiana Oxyz 5 Oe1e2e3, ruota attorno all’asse Oz mantenendosinel piano Oxy. Una molla ideale di costante k collega il centro C con la proiezione ortogonaleB di questo sull’asse Ox. Il punto A di ) diametralmente opposto a O e soggetto ad unaresistenza viscosa con costante di frizione (. Su ) agisce infine un sistema di forze dirisultante *R = !amg e2 e momento risultante in C *MC = mgr e1 + bkr2 sin2 cos 2 e3,essendo a e b due costanti positive adimensionali.
Stefano Siboni 2550

Universita degli studi di Trento Esercizi di Meccanica razionale
Assunti i vincoli ideali e sapendo che l’asse Oy e diretto verticalmente verso l’alto, si usil’angolo 2 " R in figura per determinare del sistema:
(a) gli equilibri;(b) le proprieta di stabilita degli equilibri;
(c) le equazioni pure del moto.
Soluzione(a) EquilibriPer determinare gli equilibri del sistema scleronomo e necessario calcolare la componentegeneralizzata di tutte le sollecitazioni applicate: il peso, l’interazione elastica fra i punti Ce B, il sistema di forze di risultante *R e momento risultante *MC , la resistenza viscosa in A.
Forze pesoIl sistema delle forze peso e notoriamente posizionale e conservativo. Poiche la circonferenzae omogenea, il suo baricentro coincide con il centro geometrico e di simmetria C . Il potenzialegravitazionale diventa percio:
Ug = !mg e2 · (C ! O) = mgr cos 2 .
Forze elasticheAlla molla ideale di costante elastica k che congiunge il punto C con la sua proiezioneortogonale B sull’asse Ox e associato il potenziale:
Uel = !k
2(C ! B)2 = !k
2r2cos22 =
kr2
2sin22 ! kr2
2.
Sistema di forze agenti su )Si indichi con S il sistema di forze agenti su ) con risultante *R e momento risultante *MC
in C . La circonferenza e un sistema rigido in moto nel piano Oxy; un punto dello spazio adessa solidale e ovviamente il centro C , che ha vettore posizione
C ! O = r sin 2 e1 ! r cos 2 e2 .
La rotazione di ) rispetto alla terna assoluta viene naturalmente descritta dall’angolo 2. Lacomponente generalizzata del sistema di forze S e allora data dalla formula:
QS& =
.C
.2· *R +
.2
.2e3 · *MC =
.
.2(r sin 2 e1 ! r cos 2 e2) · *R + e3 · *MC =
= r(cos 2 e1 + sin2 e2) · *R + e3 · *MC .
Nella fattispecie si ha *R = !amg e2 e *MC = mgr e1 + bkr2 sin2 cos 2 e3, per cui
QS& = !amgr sin2 + bkr2 sin2 cos 2 .
Stefano Siboni 2551

Universita degli studi di Trento Esercizi di Meccanica razionale
Rimane cosı accertato che la sollecitazione S e puramente posizionale e dunque conservativa,dato che il sistema scleronomo presenta un unico grado di liberta. A QS
& e associato l’ovviopotenziale
US(2) = amgr cos 2 +bkr2
2sin22 .
Resistenza viscosa in AIl punto A e individuato dal vettore posizione
A ! O = 2r sin 2 e1 ! 2r cos 2 e2
con derivata parziale prima
.A
.2= 2r(cos 2 e1 + sin 2 e2) .
La componente generalizzata della resistenza viscosa !(A vale dunque:
Qv& = !(A · .A
.2= !(
.A
.22 · .A
.2= !(
!!!!.A
.2
!!!!2
2 = !4(r22 .
Si tratta di una sollecitazione completamente dissipativa, in quanto
"v = Qv&2 = !4(r222 ' 0
e "v = 0 solo se 2 = 0.
Potenziale del sistemaLa somma dei potenziali gravitazionale, elastico e relativo al sistema S fornisce il potenzialedel sistema:
U(2) = mgr cos 2 +kr2
2sin22 + amgr cos 2 +
bkr2
2sin22 =
= (1 + a)mgr cos 2 + (1 + b)kr2
2sin22 .
EquilibriLa resistenza viscosa, in quanto sollecitazione dissipativa continua, e inifluente nel deter-minare la statica del sistema. Gli equilibri si identificano percio con i punti critici delpotenziale U , gli zeri della derivata parziale prima:
.U
.2(2) = !(1 + a)mgr sin2 + (1 + b)kr2 sin2 cos 2 .
L’equazione di equilibrio si scrive cosı:
(1 + b)kr2 sin 2$!1 + a
1 + b
mg
kr+ cos 2
%= 0
Stefano Siboni 2552

Universita degli studi di Trento Esercizi di Meccanica razionale
e da essa si deducono due configurazioni di equilibrio definite incondizionatamente:
2 = 0 2 = "
e due ulteriori equilibri definiti e distinti dai precedenti:
2 = arccos$1 + a
1 + b
mg
kr
%:= 2) 2 = !arccos
$1 + a
1 + b
mg
kr
%= !2)
a condizione che si abbia0 <
1 + a
1 + b
mg
kr< 1 . (492.1)
In tal caso risulta ovviamente 2) " (0,"/2) — si noti che la positivita del parametro adi-mensionale nella (492.1) e imposta dalla positivita di tutti i coe!cienti a, b,m, g, k, r.
(b) Stabilita degli equilibriIl sistema scleronomo e soggetto a sollecitazioni in parte posizionali conservative e in partecompletamente dissipative. Gli equilibri sono inoltre tutti isolati, dal momento che il loronumero e finito. Risulta quindi possibile discutere in modo completo le proprieta di stabilitadi tutti gli equilibri facendo uso della forma forte del teorema di Lagrange-Dirichlet, basatasui criteri di Barbasin e Krasovskii. A questo scopo occorre determinare la natura dei puntidi equilibrio, distinguendo i massimi relativi propri del potenziale U dai punti critici che noncostituiscono massimo. Lo strumento principale, al solito, e dato dalla derivata seconda delpotenziale
U&&(2) =.2U
.22(2) = !(1 + a)mgr cos 2 + (1 + b)kr2(cos22 ! sin22)
che va calcolata in corrispondenza di ciascun equilibrio.
Configurazione 2 = 0In questo caso la derivata seconda del potenziale assume la forma
U&&(0) = !(1 + a)mgr + (1 + b)kr2 = (1 + b)kr2$1 ! 1 + a
1 + b
mg
kr
%(492.2)
il cui segno dipende dal parametro adimensionale (1 + a)mg/(1 + b)kr. Si hanno tre diversepossibilita:
. per1 + a
1 + b
mg
kr< 1 la (492.2) implica che sia U&&(0) > 0 e l’equilibrio risulta instabile in
quanto non costituisce massimo relativo di U ;
. qualora sia1 + a
1 + b
mg
kr> 1 si ha all’opposto U&&(0) < 0, in modo che la configurazione
si riconosce essere un massimo relativo proprio del potenziale. L’equilibrio e asintotica-mente stabile per i criteri di Barbasin-Krasovskii;
Stefano Siboni 2553

Universita degli studi di Trento Esercizi di Meccanica razionale
. se infine1 + a
1 + b
mg
kr= 1, la derivata seconda del potenziale si annulla e l’analisi di stabilita
si fa piu laboriosa. Nella fattispecie si ha, in e"etti,
U&&(2) = (1 + b)kr2(! cos 2 + cos22 ! sin22) = (1 + b)kr2(! cos 2 + cos 22)
e la derivata terza del potenziale diventa
U (3)(2) = (1 + b)kr2(sin 2 ! 2 sin 22)
mentre la derivata quarta vale
U (4)(2) = (1 + b)kr2(cos 2 ! 4 cos 22)
per cuiU (3)(0) = 0 e U (4)(0) = !3(1 + b)kr2 .
In un intorno di 2 = 0 la funzione potenziale ammette percio l’approssimazione diTaylor al quarto ordine
U(2) = U(0) +14!
U (4)(0)24 + o(24) = U(0) ! 18(1 + b)kr224 + o(24)
da cui si riconosce che l’equilibrio e un massimo relativo proprio di U , asintoticamentestabile.
Configurazione 2 = "Per 2 = " la derivata seconda del potenziale ha sempre segno positivo
U&&(") = (1 + a)mgr + (1 + b)kr2 > 0
e l’equilibrio risulta quindi instabile in quanto non costituisce massimo relativo proprio diU — in e"etti si tratta di un minimo relativo proprio.
Configurazioni 2 = 2) e 2 = !2)
Queste due configurazioni sono definite per (1 + a)mg/(1 + b)kr < 1 e presentano le stesseproprieta di stabilita, dal momento che il potenziale del sistema e una funzione pari dellavariabile 2:
U(!2) = U(2) %2 " R .
Si ha in e"etti
U&&(2)) = U&&(!2)) = (1 + b)kr2$!1 + a
1 + b
mg
krcos 2) + cos22) ! sin22)
%
e ricordando la definizione di 2)
U&&(2)) = (1 + b)kr2$! cos 2) cos 2) + cos22) ! sin22)
%= !(1 + b)kr2sin22) < 0
Stefano Siboni 2554

Universita degli studi di Trento Esercizi di Meccanica razionale
in quanto e sempre 2) " (0,"/2). Quando definite, le due configurazioni simmetriche rap-presentano sempre dei massimi relativi propri del potenziale e sono percio asintoticamentestabili per la forma forte del teorema di Lagrange-Dirichlet.
(c) Equazioni pure del motoLa circonferenza omogenea ) ha baricentro in C e ruota attorno all’asse fisso Oz con velocitaangolare 2 e3. La sua energia cinetica si calcola quindi immediatamente per mezzo della notaformula
T =12I*Oz|2 e3|2 =
12[m|C !O|2 + I*
Cz]22 =
12(mr2 + mr2)22 = mr222 .
La lagrangiana L = T + U del sistema si scrive pertanto
L = mr222 + (1 + a)mgr cos 2 + (1 + b)kr2
2sin22
e l’unica equazione pura del moto assume la forma
d
dt
$.L
.2
%! .L
.2= Qv
&
ossia2mr22 + (1 + a)mgr sin2 ! (1 + b)kr2 sin 2 cos 2 = !4(r22 .
Esercizio 493. Piccole oscillazioniUn sistema scleronomo a vincoli ideali posizionale e conservativo e descritto dalla lagrangiana
L = 5(x2 ! 2xy + 2y2) ! 5x2 ! 2xy ! 10y2 + x3 + xy2
in termini delle coordinate generalizzate adimensionali (x, y) " R2. Determinare:
(a) le equazioni delle piccole oscillazioni nell’intorno dell’equilibrio stabile (x, y) = (0, 0);(b) le corrispondenti frequenze normali;(c) le espressioni dei relativi modi normali.
Soluzione(a) Equazioni delle piccole oscillazioniLa lagrangiana del sistema scleronomo deve consistere di una forma quadratica definitapositiva delle velocita generalizzate x, y, identificabile con l’energia cinetica, e di una fun-zione delle sole coordinate lagrangiane x, y che rappresenta il potenziale delle sollecitazioniapplicate. L’energia cinetica e quindi espressa da:
T = 5(x2 ! 2xy + 2y2) =12(10x2 ! 20xy + 20y2) =
12(x y)
+10 !10!10 20
,+xy
,
Stefano Siboni 2555

Universita degli studi di Trento Esercizi di Meccanica razionale
e la sua matrice di rappresentazione e indipendente dalle coordinate generalizzate:
A(x, y) =+
10 !10!10 20
,.
Il termine residuo della lagrangiana rappresenta il potenziale del sistema
U(x, u) = !5x2 ! 2xy ! 10y2 + x3 + xy2
con le derivate parziali prime
.U
.x(x, y) = !10x ! 2y + 3x2 + y2 .U
.y(x, y) = !2x ! 20y + 2xy
che porgono le equazioni di equilibrio')
*!10x ! 2y + 3x2 + y2 = 0
!2x ! 20y + 2xy = 0
di cui (x, y) = (0, 0) costituisce certamente una soluzione. Per le derivate parziali secondedel potenziale si hanno poi le espressioni:
.2U
.x2(x, y) = !10 + 6x
.2U
.y.x(x, y) = !2 + 2y
.2U
.x.y(x, y) = !2 + 2y
.2U
.y2(x, y) = !20 + 2x
in modo che l’hessiana del potenziale in (x, y) = (0, 0) diventa
HU (0, 0) =+!10 !2!2 !20
,
ed e immediato verificarne il carattere definito negativo. In forma matriciale l’equazionedelle piccole oscillazioni nell’intorno di (x, y) = (0, 0) risulta cosı:
A(0, 0)+
xy
,! HU (0, 0)
+xy
,= 0
ovvero +10 !10!10 20
,+xy
,!+!10 !2!2 !20
,+xy
,= 0
che eseguiti i prodotti e separate le componenti si riduce al set di equazioni scalari:')
*10x ! 10y + 10x + 2y = 0
!10x + 20y + 2x + 20y = 0 .
Stefano Siboni 2556

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Frequenze normali delle piccole oscillazioniLe pulsazioni normali delle piccole oscillazioni sono determinate dall’equazione caratteristica
det[#2A(0, 0) + HU (0, 0)] = 0
che sostituendo le espressioni di A(0, 0) e HU (0, 0) diventa
det-#2
+10 !10!10 20
,++!10 !2!2 !20
,.= 0
ossia
det+
10#2 ! 10 !10#2 ! 2!10#2 ! 2 20#2 ! 20
,= 0
e quindi(10#2 ! 10)(20#2 ! 20) ! (10#2 + 2)2 = 0 .
L’equazione biquadratica si riscrive nella forma
50(#2 ! 1)2 ! (5#2 + 1)2 = 0
che equivale a($
50#2 !$
50)2 ! (5#2 + 1)2 = 0
o ancora a($
50#2 !$
50 + 5#2 + 1)($
50#2 !$
50 ! 5#2 ! 1) = 0 .
Di qui seguono le soluzioni
#2 =$
50 ! 1$50 + 5
=($
50 ! 1)($
50 ! 5)50! 25
=55 ! 6
$50
25=
11! 6$
25
#2 =$
50 + 1$50 ! 5
=($
50 + 1)($
50 + 5)50! 25
=55 + 6
$50
25=
11 + 6$
25
e le pulsazioni normali
#1 =
L11 ! 6
$2
5#2 =
L11 + 6
$2
5,
cui corrispondono le frequenze normali richieste:
f1 =#1
2"=
12"
L11 ! 6
$2
5f2 =
#2
2"=
12"
L11 + 6
$2
5.
Stefano Siboni 2557

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Modi normali delle piccole oscillazioniIl sistema ammette due modi normali di oscillazione nell’intorno dell’equilibrio (x, y) = (0, 0),quanti i gradi di liberta del sistema, un “modo basso” corrispondente alla pulsazione inferiore#1, e un “modo alto” associato alla pulsazione superiore #2. In ambo i casi l’equazione delleampiezze assume la forma:
7#2
i A(0, 0) + HU (0, 0)8 + ai
bi
,= 0 ,
+ai
bi
,&=+
00
,. (493.1)
Modo basso
Per # = #1 =
L11! 6
$2
5l’equazione (493.1) diventa
/
0110
11 ! 6$
25
! 10 !1011! 6
$2
5! 2
!1011 ! 6
$2
5! 2 20
11 ! 6$
25
! 20
2
34
/
1a1
b1
2
4 = 0
e dopo semplici passaggi algebrici si riduce a
/
112 ! 12
$2 !24 + 12
$2
!24 + 12$
2 24 ! 24$
2
2
4+
a1
b1
,= 0 .
L’equazione matriciale e equivalente al sistema lineare omogeneo
')
*(1 !
$2)a1 + (!2 +
$2)b1 = 0
(!2 +$
2)a1 + (2 ! 2$
2)b1 = 0
le cui equazioni sono linearmente dipendenti, potendosi scrivere come
'(()
((*
a1
b1=
2 !$
21 !
$2
=(2 !
$2)(1 +
$2)
1 ! 2=
2 + 2$
2 !$
2 ! 2!1
= !$
2
a1
b1=
!2 + 2$
2!2 +
$2
=(!2 + 2
$2)(2 +
$2)
2 ! 4=
!4 ! 2$
2 + 4$
2 + 4!2
= !$
2 .
L’espressione generale del modo normale di piu bassa frequenza e pertanto
+x(t)y(t)
,= b1
+!$
21
,cos+L
11 ! 6$
25
t + /1
,% t " R
con b1 &= 0 e /1 costanti reali arbitrarie.
Stefano Siboni 2558

Universita degli studi di Trento Esercizi di Meccanica razionale
Modo alto
Nel caso di # = #2 =
L11 + 6
$2
5l’equazione delle ampiezze (493.1) assume la forma
/
0110
11 + 6$
25
! 10 !1011 + 6
$2
5! 2
!1011 + 6
$2
5! 2 20
11 + 6$
25
! 20
2
34
/
1a2
b2
2
4 = 0
e con calcoli analoghi a quelli svolti per il modo basso conduce alla soluzione generale
a2
b2=
$2 .
Per il modo di frequenza piu alta si ha cosı l’espressione:
+x(t)y(t)
,= b2
+$2
1
,cos
+L11 + 6
$2
5t + /2
,% t " R
nella quale b2 &= 0 e /2 indicano due costanti reali arbitrarie.
Esercizio 494. Baricentro, matrice d’inerzia ed equilibratura dinamicaUn sistema rigido si compone di una piastra quadrata OABC , di una seconda piastraquadrata ODEA, e di un’asta rettilinea OD, disposte nel piano coordinato Oxy di unaterna cartesiana Oxyz come illustrato in figura. I lati delle due piastre e l’asta OD hannotutti lunghezza a. Indicata con µ una massa caratteristica, la piastra OABC e l’asta hannodensita rispettive
&(x, y) =4µ
a4x(a ! y) %(x, y) " [0, a]2
,(P ) =µ
a3|P ! D|2 %P " OD
mentre la densita di ODEA e trascurabile.
Stefano Siboni 2559

Universita degli studi di Trento Esercizi di Meccanica razionale
Determinare:
(a) la massa e il baricentro rispetto ad Oxyz del sistema;(b) la matrice d’inerzia in Oxyz del sistema;(c) il momento d’inerzia del sistema rispetto alla retta OB;(d) il momento d’inerzia del sistema rispetto all’asse AB;(e) dove va saldata al sistema una massa puntiforme µ in modo che il sistema rigido ottenuto
sia dinamicamente equilibrato attorno all’asse fisso Ox.
Soluzione(a) Massa e baricentro del sistemaPer determinare massa e baricentro del sistema e opportuno considerare questo come l’unionedell’asta OD e della piastra quadrata OABC . Poiche l’intersezione OABC 2 OD consta diun solo punto, che da contributo nullo tanto agli integrali curvilinei su OD quanto a quellidi superficie su OABC , piastra e asta possono considerarsi parti disgiunte: la massa delsistema viene cosı calcolata per mezzo della proprieta additiva, calcolando separatamentee poi sommando le masse di OABC e di OD; il baricentro del sistema si ricava invece dalteorema distributivo, che richiede l’individuazione dei baricentri parziali di OABC e OD.Per via della sua densita areale trascurabile, la piastra ODEA e irrilevante.
Massa della piastra OABCLa massa della piastra OABC viene determinata per integrazione diretta della densita areale& sul quadrato {(x, y) " [0, a]2}:
mOABC
=a6
0
dx
a6
0
dy4µ
a4x(a ! y) =
4µ
a4
a6
0
xdx
a6
0
(a ! y)dy =
=4µ
a4
a2
2
-! (a ! y)2
2
.a
0
=2µ
a2
a2
2= µ .
Massa dell’asta ODMentre l’estremo D e individuato dal vettore posizione D ! O = !a e2, l’asta ammettel’ovvia parametrizzazione
P ! O = y e2 , y " [!a, 0] ,
per cui la densita lineare di OD assume la forma esplicita
,(P ) =µ
a3|y e2 ! (!a e2)|2 =
µ
a3(y + a)2 , y " [!a, 0] .
Essendo poi ds = dy, la massa dell’asta vale pertanto
mOD
=06
!a
µ
a3(y + a)2dy =
µ
a3
-(y + a)3
3
.0
!a
=µ
a3
a3
3=
µ
3.
Stefano Siboni 2560

Universita degli studi di Trento Esercizi di Meccanica razionale
Massa del sistemaPer ottenere la massa m del sistema non resta che sommare le masse parziali appena calco-late:
m = mOABC
+ mOD
= µ +µ
3=
43µ .
Baricentro della piastra OABCIl baricentro G
OABCdella piastra deve collocarsi nel piano di giacitura di questa, ossia nel
piano coordinato Oxy del sistema di riferimento, rispetto al quale dunque il baricentro saraindividuato da un vettore posizione della forma
GOABC
! O = xOABC
e1 + yOABC
e2 .
L’ascissa e data dalla relazione
xOABC
=1
mOABC
6
OABC
x& dA =1µ
a6
0
dx
a6
0
dy x4µ
a4x(a ! y) =
4a4
a6
0
dx
a6
0
dy x2(a ! y)
=4a4
a6
0
x2dx
a6
0
(a ! y)dy =4a4
a3
3
-! (a ! y)2
2
.a
0
=43a
a2
2=
23a ,
mentre per l’ordinata si ha
yOABC
=1
mOABC
6
OABC
y& dA =1µ
a6
0
dx
a6
0
dy y4µ
a4x(a ! y) =
=4a4
a6
0
xdx
a6
0
y(a ! y)dy =4a4
a2
2
-ay2
2! y3
3
.a
0
=2a2
$a3
2! a3
3
%=
a
3
in modo che risultaG
OABC! O =
23a e1 +
13a e2 .
Baricentro dell’asta ODIl baricentro G
ODdell’asta si colloca lungo l’asse Oy, che costituisce un ovvio asse di sim-
metria di OD:G
OD= y
ODe2 .
L’unica coordinata non banale del centro di massa e dunque
yOD
=1
mOD
6
OD
y , ds =3µ
06
!a
yµ
a3(y + a)2dy =
3a3
06
!a
(y3 + 2ay2 + a2y)dy =
=3a3
-y4
4+ 2a
y3
3+ a2 y2
2
.0
!a
=3a3
$!a4
4+
23a4 ! a4
2
%= 3a
$!1
4+
23! 1
2
%= !1
4a
Stefano Siboni 2561

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui
GOD
! O = !14a e2 .
Baricentro del sistemaIl baricentro G del sistema e ora determinato dal teorema distributivo, per mezzo dellarelazione:
G ! O =m
OABC(G
OABC! O) + m
OD(G
OD! O)
mOABC
+ mOD
che sostituiti i valori delle masse e i vettori posizione dei baricentri parziali porge
G ! O =µ$2
3a e1 +
13a e2
%+
µ
3
$!1
4a e2
%
µ +µ
3
=34
$23a e1 +
13a e2 ! 1
12a e2
%=
=34
$23a e1 +
14a e2
%=
12a e1 +
316
a e2 .
(b) Matrice d’inerzia in Oxyz del sistemaLa proprieta additiva assicura che la matrice d’inerzia del sistema puo calcolarsi come sommadelle matrici d’inerzia della piastra OABC e dell’asta OD rispetto al medesimo riferimentoOxyz, mentre trascurabile e il contributo della piastra ODEA.
Matrice d’inerzia della piastra OABCLa collocazione della piastra nel piano coordinato Oxy autorizza ad a"ermare che la relativamatrice d’inerzia in Oxyz deve assumere la forma
[LOABCO ] =
/
01LOABC
xx LOABCxy 0
LOABCxy LOABC
yy 0
0 0 LOABCxx + LOABC
yy
2
34 .
Il momento d’inerzia rispetto all’asse Ox e dato da
LOABCxx =
6
OABC
y2& dA =a6
0
dx
a6
0
dy y2 4µ
a4x(a ! y) =
4µ
a4
a6
0
xdx
a6
0
(ay2 ! y3)dy =
=4µ
a4
a2
2
-ay3
3! y4
4
.a
0
=2µ
a2
$13! 1
4
%a4 = 2µa2 1
12=
16µa2
mentre per il momento d’inerzia relativo ad Oy vale l’espressione
LOABCyy =
6
OABC
x2& dA =a6
0
dx
a6
0
dy x2 4µ
a4x(a ! y) =
4µ
a4
a6
0
x3dx
a6
0
(a ! y)dy =
=4µ
a4
a4
4
-! (a ! y)2
2
.a
0
=12µa2.
Stefano Siboni 2562

Universita degli studi di Trento Esercizi di Meccanica razionale
Quanto all’unico prodotto d’inerzia non banalmente nullo, la definizione porge
LOABCxy = !
6
OABC
xy & dA = !a6
0
dx
a6
0
dy xy4µ
a4x(a ! y) = !4µ
a4
a6
0
x2dx
a6
0
(ay ! y2)dy =
= !4µ
a4
a3
3
$a
a2
2! a3
3
%= !4
3µ
a
$12! 1
3
%a3 = !4
3µa2 1
6= !2
9µa2.
La matrice d’inerzia della piastra OABC diventa pertanto
[LOABCO ] = µa2
/
011/6 !2/9 0!2/9 1/2 0
0 0 2/3
2
34 .
Matrice d’inerzia dell’asta ODPoiche l’asta e situata lungo l’asse Oy, tutti i suoi prodotti d’inerzia sono nulli, al pari delmomento d’inerzia rispetto allo stesso asse. I soli momenti d’inerzia non nulli sono quellirelativi agli assi ortogonali Ox e Oz, peraltro coincidenti per via dell’evidente simmetria.Ne deriva la matrice d’inerzia seguente:
[LODO ] =
/
01LOD
xx 0 00 0 0
0 0 LODxx
2
34 = µa2
/
011/30 0 0
0 0 00 0 1/30
2
34
in quanto
LODxx =
6
OD
y2, ds =06
!a
y2 µ
a3(y + a)2dy =
µ
a3
06
!a
(y4 + 2ay3 + a2y2)dy =
=µ
a3
-y5
5+ 2a
y4
4+ a2 y3
3
.0
!a
=µ
a3
$a5
5! 2a
a4
4+ a2 a3
3
%=
130
µa2.
Matrice d’inerzia del sistemaLa somma delle matrici d’inerzia parziali, relative a piastra ed asta, fornisce la matriced’inerzia in Oxyz del sistema
[LO] = [LOABCO ] + [LOD
O ] = µa2
/
011/5 !2/9 0!2/9 1/2 0
0 0 7/10
2
34 .
Stefano Siboni 2563

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Momento d’inerzia del sistema rispetto alla retta OBLa retta OB passa chiaramente per l’origine O della terna di riferimento ed un suo versoredirettore (tangente) e dato da
n =B ! O
|B ! O|=
a e1 + a e2
|a e1 + a e2 |=
1$2
e1 +1$2
e2 .
Il momento d’inerzia relativo a tale retta e quindi espresso per tramite dell’operatore d’iner-zia in O:
IOB = IOn = n · LO(n) =$ 1$
21$2
0%µa2
/
011/5 !2/9 0!2/9 1/2 0
0 0 7/10
2
34
/
11/
$2
1/$
20
2
4 =
=12µa2(1 1 0)
/
011/5 !2/9 0!2/9 1/2 0
0 0 7/10
2
34
/
1110
2
4 =12µa2
$15! 2
9! 2
9+
12
%=
23180
µa2.
(d) Momento d’inerzia del sistema rispetto alla retta ABLa retta AB risulta parallela all’asse Oy, rispetto al quale il momento d’inerzia IOy = Lyy =µa2/2 e gia stato calcolato. Conviene dunque considerare l’asse baricentrale Gy, paralleloai precedenti, e applicare due volte il teorema di Huygens-Steiner.
Indicata con xG
= a/2 l’ascissa del baricentro G del sistema, si hanno le relazioni
IAB = IGy + m(a ! xG
)2 IOy = IGy + mx2G
dalle quali, sottraendo membro a membro, si ricava
IAB ! IOy = m(a ! xG
)2 !mx2G
Stefano Siboni 2564

Universita degli studi di Trento Esercizi di Meccanica razionale
e quindi
IAB = IOy + m(a ! xG
)2 ! mx2G
=12µa2 +
43µ$a ! a
2
%2! 4
3µ$a
2
%2=
12µa2 .
Si osservi che il momento d’inerzia del sistema rispetto all’asse AB coincide con quellorelativo all’asse coordinato Oy. Cio e dovuto al fatto che i due assi si trovano alla stessadistanza a ! x
G= x
G= a/2 dall’asse baricentrale Gy.
(e) Equilibratura dinamica dell’asse fisso OxSia P ! O = x
Pe1 + y
Pe2 il vettore posizione della massa addizionale µ, rappresentata dal
punto P . Lo scopo e quello di determinare le coordinate xP
e yP
in modo che l’asse Ox risulticentrale d’inerzia per il sistema modificato con l’introduzione di P . Si deve percio richiedere:(i) che il baricentro del nuovo sistema appartenga all’asse Ox (equilibratura statica), e (ii)che il versore e1 sia autovettore dell’operatore d’inerzia in G del sistema modificato.
Equilibratura statica del sistema con asse fisso OxIl baricentro G" del sistema modificato si calcola immediatamente ricorrendo al teoremadistributivo, applicato al sistema originario di massa m e al punto P di massa µ,
G" ! O =m(G ! O) + µ(P ! O)
m + µ=
=
43µ$1
2a e1 +
316
a e2
%+ µ(x
Pe1 + y
Pe2)
43µ + µ
=37
$23a + x
P
%e1 +
37
$14a + y
P
%e2 .
Per l’equilibratura statica dell’asse Ox occorre e basta che G" " Ox, ossia
0 = (G" ! O) · e2 =37
$14a + y
P
%
e quindi
yP
= !14a .
Equilibratura dinamica del sistema con asse fisso OxPer la proprieta additiva, la matrice d’inerzia del nuovo sistema vale
[L"O] = [LO] + µ
/
1y2
P!x
Py
P0
!xP
yP
x2P
00 0 x2
P+ y2
P
2
4 .
Se il versore e1 e un autovettore dell’operatore d’inerzia L"O del sistema modificato, allora
Ox costituisce un asse principale d’inerzia in O del sistema. Cio equivale a richiedere cheper un qualche scalare , si abbia:
[L"O]
/
1100
2
4 = ,
/
1100
2
4 . (494.1)
Stefano Siboni 2565

Universita degli studi di Trento Esercizi di Meccanica razionale
D’altra parte, poiche G " Ox, in tali condizioni il teorema di Huygens-Steiner generalizzatoassicura che Ox e anche asse centrale d’inerzia. Posto G" !O = x
G! e1, vale infatti:
[L"G! ] = [L"
O] ! (m + µ)
/
10 0 00 x2
G! 00 0 x2
G!
2
4
per cui
[L"G!]
/
1100
2
4 = [L"O]
/
1100
2
4! (m + µ)
/
10 0 00 x2
G! 00 0 x2
G!
2
4
/
1100
2
4 = [L"O]
/
1100
2
4 = ,
/
1100
2
4
e dunque e1 risulta anche autovettore dell’operatore d’inerzia in G" del nuovo sistema rigido.Non rimane cosı che calcolare esplicitamente la matrice d’inerzia [L"
O]
[L"O] = µ
/
000001
15a2 +
$!1
4a%2
!29a2 ! x
P
$!1
4a%
0
!29a2 ! x
P
$!1
4a% 1
2a2 + x2
P0
0 0710
a2 + x2P
+$!1
4a%2
2
333334
in modo che la condizione (494.1) si riduce a
µ
/
0001
2180
a2
!29a2 +
14ax
P
0
2
3334 =
/
1,00
2
4
ed e soddisfatta unicamente per
!29a2 +
14ax
P= 0
ossia
xP
=89a .
In definitiva, la massa addizionale µ va saldata al sistema rigido nella posizione
P ! O = xP
e1 + yP
e2 =89a e1 !
14a e2
corrispondente ad un punto della piastra ODEA.
Stefano Siboni 2566

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 495. Sistema scleronomo a 2 g.d.l. posizionale conservativoUn disco circolare omogeneo D, di centro C , raggio r e massa m, rotola senza strisciareall’interno di una circonferenza fissa ) di centro O e raggio R > r, posta nel piano coordinatoOxy di una terna cartesiana Oxyz. Una molla ideale di costante elastica k connette C conil vertice P di un quadrato L, di massa m, vincolato a traslare lungo l’asse Oy e al di sottodi ) — vedi figura. L’intero sistema e soggetto al campo delle forze peso.
Supposti i vincoli ideali, si faccia uso delle coordinate 4 " R e s ( 1 in figura per determinare:
(a) l’energia cinetica del sistema;(b) gli equilibri ordinari;(c) le proprieta di stabilita degli equilibri ordinari;(d) le equazioni di Lagrange del moto;(e) se la configurazione (s, 4) = (1, 0) e un equilibrio di confine del sistema.
Soluzione(a) Energia cineticaL’energia cinetica del sistema e data dalla somma delle energie cinetiche del disco circolareD e del quadrato omogeneo L.
Energia cinetica del disco DDal momento che il disco D risulta privo di punti fissi, conviene determinarne l’energiacinetica ricorrendo al teorema di Konig e scrivere
TD =m
2C2 +
12ICz|*#D|2
dove il baricentro del disco e individuato dal vettore posizione
C ! O = (R ! r) sin 4 e1 ! (R ! r) cos 4 e2
Stefano Siboni 2567

Universita degli studi di Trento Esercizi di Meccanica razionale
ed ha velocita istantanea
C = (R ! r)(cos 4 e1 + sin 4 e2)4
con modulo quadratoC2 = (R ! r)2 42 ,
il momento d’inerzia del disco omogeneo rispetto all’asse baricentrale Cz vale
ICz =mr2
2
e la velocita angolare istantanea di D e data dalla nota formula
*#D = !$R
r! 1
%4 e3 .
Sostituendo i dati nella formula di Konig si ottiene cosı:
TD =m
2(R ! r)242 +
12
mr2
2
!!!!!$R
r! 1
%4 e3
!!!!2
=34m(R ! r)242 .
Energia cinetica della lamina quadrata LLa lamina quadrata e vincolata a traslare lungo l’asse Oy: tutti i suoi punti hanno perciola stessa velocita istantanea, identificabile con quella del punto P . Dalla relazione P !O =!Rs e2 si ha
P = !Rs e2
e l’energia cinetica della lamina quadrata diventa cosı:
TL =m
2P 2 =
mR2
2s2.
Energia cinetica del sistemaBasta ora sommare le energie cinetica di disco e lamina per ottenere quella dell’intero sis-tema:
T = TD + TL =34m(R ! r)2 42 +
mR2
2s2. (495.1)
(b) Equilibri ordinariLe sollecitazioni che agiscono sul sistema scleronomo hanno tutte natura posizionale conser-vativa: si tratta delle forze peso agenti sul disco D e sulla lamina quadrata L e dell’interazioneelastica fra i punti C e P . Ognuna di queste interazioni viene rappresentata dall’appropriatopotenziale.
Stefano Siboni 2568

Universita degli studi di Trento Esercizi di Meccanica razionale
Potenziale gravitazionaleIl potenziale gravitazionale e la somma dei potenziali gravitazionali di disco e asta. Ilbaricentro del disco omogeneo coincide con il suo centro geometrico (e di simmetria) C ,individuato dal vettore posizione:
C ! O = (R ! r) sin 4 e1 ! (R ! r) cos 4 e2
per cui il potenziale gravitazionale del disco si scrive:
UDg = !mg e2 · (C !O) = mg(R ! r) cos 4 .
Una relazione analoga si dovrebbe applicare alla lamina quadrata L ma la posizione delbaricentro G di L non e nota, non essendo specificata la densita areale del corpo — il testodel problema non precisa se la lamina quadrata sia omogenea o meno. Cio nonostante,siccome la lamina e per ipotesi vincolata a traslare lungo l’asse Oy il vettore posizione G!Psi mantiene costante lungo qualsiasi moto possibile del sistema. Il potenziale gravitazionaledella piastra quadrata diventa cosı:
ULg = !mg e2 · (G !O) = !mg e2 · (G ! P + P ! O) =
= !mg e2 · (G ! P ) ! mg e2 · (P ! O) = !mg e2 · (G ! P ) ! mg e2 · (!Rs e2) == mgRs + costante .
Omessa la costante additiva, il potenziale gravitazionale totale e pertanto:
Ug = UDg + UL
g = mg(R ! r) cos 4 + mgRs .
Potenziale elasticoGli estremi della molla ideale di costante k sono individuati dai vettori posizione:
C ! O = (R ! r) sin 4 e1 ! (R ! r) cos 4 e2 P ! O = !Rs e2 ,
per cui si haC ! P = (R ! r) sin 4 e1 + [Rs ! (R ! r) cos 4] e2
e il potenziale associato diventa:
Uel = !k
2(C ! P )2 = !k
27(R ! r)2sin24 + R2s2 + (R ! r)2cos24 ! 2R(R ! r)s cos 4
8=
= !k
27(R ! r)2 + R2s2 ! 2R(R ! r)s cos 4
8.
Potenziale del sistemaLa somma dei potenziali gravitazionale ed elastico porge il potenziale del sistema:
U(s, 4) = Ug + Uel = mg(R ! r) cos 4 + mgRs ! kR2
2s2 + kR(R ! r)s cos 4
definito per ogni (s, 4) " [1,+)) - R.
Stefano Siboni 2569

Universita degli studi di Trento Esercizi di Meccanica razionale
EquilibriGli equilibri ordinari di un sistema scleronomo posizionale conservativo sono dati dei punticritici del potenziale nell’interno del dominio della parametrizzazione. Nella fattispecie sidevono quindi porre simultaneamente uguali a zero le derivate parziali prime:
.U
.s(s, 4) = mgR ! kR2s + kR(R ! r) cos 4
.U
.4(s, 4) = !mg(R ! r) sin 4 ! kR(R ! r) s sin 4
e risolvere il sistema di equazioni:')
*mgR ! kR2s + kR(R ! r) cos 4 = 0
!mg(R ! r) sin 4 ! kR(R ! r) s sin 4 = 0(s, 4) " (1,+)) - R
che con qualche semplificazione si riduce alla forma equivalente:')
*mg ! kRs + k(R ! r) cos 4 = 0
(mg + kRs) sin 4 = 0(s, 4) " (1,+)) - R . (495.2)
La seconda equazione di equilibrio e verificata per
s = !mg/kR
oppure per4 = 0 4 = " .
Si esaminano separatamente i tre casi:
(i) se s = !mg/kR non si hanno soluzioni accettabili, a causa della condizione s ( 1;(ii) per 4 = 0 la prima equazione di equilibrio porge
mg ! kRs + k(R ! r) = 0
e quindi:
s =mg + k(R ! r)
kR= 1 +
mg ! kr
kR,
valore ricompreso nell’intervallo di definizione se e solo se mg > kr;(iii) se infine 4 = " dalla prima delle (495.2) si deduce:
mg ! kRs ! k(R ! r) = 0
ossias =
mg ! k(R ! r)kR
,
Stefano Siboni 2570

Universita degli studi di Trento Esercizi di Meccanica razionale
purche sia [mg ! k(R ! r)]/kR > 1.Riassumendo, gli equilibri del sistema sono:
(s, 4) =$1 +
mg ! kr
kR, 0%
,
definito per mg > kr, e
(s, 4) =$mg ! k(R ! r)
kR,"%
,
definito per [mg ! k(R ! r)]/kR > 1.
(c) Stabilita degli equilibri ordinariPer analizzare le proprieta di stabilita degli equilibri si calcolano le derivate parziali secondedel potenziale:
.2U
.s2(s, 4) = !kR2 .2U
.4.s(s, 4) = !kR(R ! r) sin 4
.2U
.s.4(s, 4) = !kR(R ! r) sin 4
.2U
.42(s, 4) = !mg(R ! r) cos 4 ! kR(R ! r)s cos 4
e la corrispondente matrice hessiana:
HU (s, 4) =
F!kR2 ! kR(R ! r) sin 4
!kR(R ! r) sin 4 !mg(R ! r) cos 4 ! kR(R ! r)s cos 4
G
in tutte le configurazioni di equilibrio determinate.
Configurazione (s, 4) =$1 +
mg ! kr
kR, 0%
Per la matrice hessiana del potenziale si ha in questo caso la forma diagonale:
HU
$1 +
mg ! kr
kR, 0%
=
F!kR2 0
0 !(R ! r)(2mg + kR ! kr)
G
dove anche il secondo autovalore presenta segno negativo
!(R ! r)(2mg + kR ! kr) < 0
per via della condizione di esistenza mg!kr > 0 dell’equilibrio, il quale risulta quindi stabileper Lagrange-Dirichlet quale massimo relativo proprio del potenziale.
Configurazione (s, 4) =$mg ! k(R ! r)
kR,"%
Nella fattispecie si ha ancora una matrice hessiana diagonale:
HU
$mg ! k(R ! r)kR
,"%
=
F!kR2 0
0 [2mg ! k(R ! r)](R ! r)
G
Stefano Siboni 2571

Universita degli studi di Trento Esercizi di Meccanica razionale
dove il primo autovalore !kR2 e certamente negativo, ma non il secondo:
[2mg ! k(R ! r)](R ! r) > 0
dovendosi avere mg ! k(R ! r) > kR per l’esistenza dell’equilibrio ordinario. Il teorema diinversione parziale di Lagrange-Dirichlet implica percio l’instabilita dell’equilibrio.
(d) Equazioni di LagrangeIl sistema in esame e olonomo posizionale conservativo a vincoli ideali. Le equazioni delmoto possono quindi esprimersi in forma lagrangiana:
d
dt
$.L
.s
%! .L
.s= 0
d
dt
$.L
.4
%! .L
.4= 0
con il potenziale cinetico L = T + U :
L =34m(R ! r)2 42 +
mR2
2s2 + mg(R ! r) cos 4 + mgRs ! kR2
2s2 + kR(R ! r)s cos 4 .
I binomi di Lagrange a primo membro richiedono il calcolo delle espressioni seguenti:
d
dt
$.L
.s
%= mR2s
.L
.s= mgR! kR2s + kR(R ! r) cos 4
d
dt
$.L
.4
%=
32m(R ! r)2 4
.L
.4= !mg(R ! r) sin 4 ! kR(R ! r)s sin 4
e le equazioni di Lagrange diventano cosı:'()
(*
mR2s !mgR + kR2s ! kR(R ! r) cos 4 = 032m(R ! r)2 4 + mg(R ! r) sin 4 + kR(R ! r)s sin 4 = 0 ,
ossia, semplificando alcuni fattori costanti,'()
(*
mRs ! mg + kRs ! k(R ! r) cos 4 = 032m(R ! r)4 + mg sin 4 + kRs sin 4 = 0 .
(e) Equilibrio di confine in (s, 4) = (1, 0)Grazie all’ipotesi dei vincoli ideali la completa caratterizzazione della configurazione (s, 4) =(1, 0) come equilibrio di confine e fornita dal teorema dei lavori virtuali, che nella fattispecieassume la forma:
.U
.s(1, 0) 3s +
.U
.4(1, 0) ' 0 % 3s ( 0 % 34 " R ,
Stefano Siboni 2572
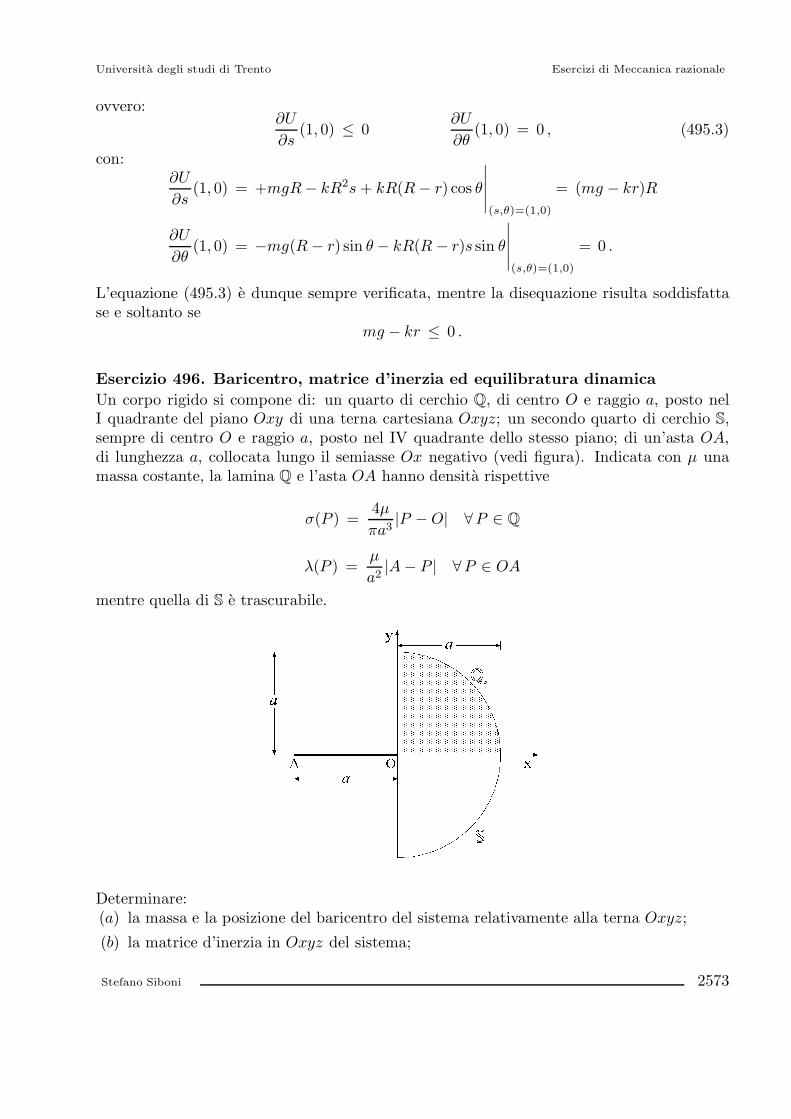
Universita degli studi di Trento Esercizi di Meccanica razionale
ovvero:.U
.s(1, 0) ' 0
.U
.4(1, 0) = 0 , (495.3)
con:.U
.s(1, 0) = +mgR! kR2s + kR(R ! r) cos 4
!!!!!(s,+)=(1,0)
= (mg ! kr)R
.U
.4(1, 0) = !mg(R ! r) sin 4 ! kR(R ! r)s sin 4
!!!!!(s,+)=(1,0)
= 0 .
L’equazione (495.3) e dunque sempre verificata, mentre la disequazione risulta soddisfattase e soltanto se
mg ! kr ' 0 .
Esercizio 496. Baricentro, matrice d’inerzia ed equilibratura dinamicaUn corpo rigido si compone di: un quarto di cerchio Q, di centro O e raggio a, posto nelI quadrante del piano Oxy di una terna cartesiana Oxyz; un secondo quarto di cerchio S,sempre di centro O e raggio a, posto nel IV quadrante dello stesso piano; di un’asta OA,di lunghezza a, collocata lungo il semiasse Ox negativo (vedi figura). Indicata con µ unamassa costante, la lamina Q e l’asta OA hanno densita rispettive
&(P ) =4µ
"a3|P ! O| %P " Q
,(P ) =µ
a2|A ! P | %P " OA
mentre quella di S e trascurabile.
Determinare:(a) la massa e la posizione del baricentro del sistema relativamente alla terna Oxyz;(b) la matrice d’inerzia in Oxyz del sistema;
Stefano Siboni 2573

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) il momento d’inerzia del sistema rispetto alla retta di equazione y + 2x = 0 nel pianoOxy;
(d) il momento d’inerzia del sistema rispetto alla retta x = a nel piano Oxy;(e) dove va saldato al sistema un punto P di massa µ in modo che il sistema rigido cosı
ottenuto sia equilibrato dinamicamente attorno all’asse fisso Ox.
Soluzione(a) Massa e baricentro del sistemaConviene trattare il sistema come composto dall’asta OA e dalla lamina Q, sottosistemi chepossono considerarsi disgiunti in quanto la loro intersezione e costituita dall’unico punto O,che non da alcun contributo ne agli integrali curvilinei ne a quelli di superficie. La laminaS ha per ipotesi densita trascurabile e puo dunque essere ignorata nel calcolo della massa edel baricentro del sistema.
Massa della piastra QLa massa della piastra si ottiene integrando la densita areale & sul dominio Q in un sistemadi coordinate polari piane definito da (x, y) = (% cos !, % sin !), (%,!) " [0, a] - [0,"/2]:
mQ =6
Q
& dA =a6
0
d% %
#/26
0
d!4µ
"a3% =
4µ
"a3
a6
0
%2d%
#/26
0
d! =4µ
"a3
a3
3"
2=
23µ .
Massa dell’asta OAMentre l’estremo A e individuato dal vettore A ! O = !a e1, l’asta OA ammette l’ovviaparametrizzazione
P ! O = x e1 , x " [!a, 0] ,
in modo che la relativa densita lineare assume la forma esplicita
,(P ) =µ
a2|A ! P | =
µ
a2|! a e1 ! x e1 | =
µ
a2(a + x) , x " [!a, 0] .
La massa dell’asta e percio data dall’integrale
mOA
=6
OA
, ds =06
!a
µ
a2(a + x)dx =
µ
a2
-(a + x)2
2
.0
!a
=µ
a2
a2
2=
µ
2.
Baricentro della piastra QLa retta y = x nel piano Oxy costituisce un evidente asse di simmetria della piastra, dalmomento che per ogni punto P di Q il corrispondente punto simmetrico rispetto a taleretta, P ), appartiene anch’esso a Q e si colloca alla stessa distanza dall’origine, in modo che&(P )) = &(P ) — la densita & e infatti funzione della sola distanza |P !O|. Ne deriva che ilbaricentro GQ della piastra deve appartenere all’asse di simmetria e presentare un vettoreposizione della forma
GQ !O = xQ e1 + xQ e2 .
Stefano Siboni 2574

Universita degli studi di Trento Esercizi di Meccanica razionale
L’ascissa incognita si determina applicando la definizione generale
xQ =1
mQ
6
Q
x& dA =32µ
a6
0
d% %
#/26
0
% cos !4µ
"a3% =
6"a3
a6
0
%3d%
#/26
0
cos ! d! =32"
a
per cui
GQ ! O =32"
a e1 +32"
a e2 .
Baricentro dell’asta OAA causa dell’ovvio asse di simmetria Ox, il baricentro G
OAdell’asta ha soltanto l’ascissa
non banalmente nulla:G
OA! O = x
OAe1 .
Questa si calcola da definizione, mediante l’integrale
xOA
=1
mOA
6
OA
x, ds =2µ
06
!a
xµ
a2(a + x)dx =
2a2
06
!a
(ax + x2)dx =
=2a2
-ax2
2+
x3
3
.0
!a
=2a2
$!a3
2+
a3
3
%= 2a
$!1
2+
13
%= !a
3
e porge quindi il vettore posizione
GOA
! O = !a
3e1 .
Massa del sistemaLa massa del sistema si ricava ricorrendo alla proprieta additiva, come somma delle masseparziali di asta e lamina precedentemente calcolate:
m = mQ + mOA
=23µ +
12µ =
76µ .
Baricentro del sistemaIl baricentro viene determinato facendo uso del teorema distributivo, applicato a Q e OA:
G ! O =mQ(GQ ! O) + m
OA(G
OA!O)
mQ + mOA
che sostituiti i valori delle masse ed i vettori posizione fornisce
G !O =-23µ$ 3
2"a e1 +
32"
a e2
%+
12µ$!a
3e1
%.$76µ%!1
=
=67· 23
$ 32"
a e1 +32"
a e2
%+
67· 12
$!a
3e1
%=
=47
$ 32"
a e1 +32"
a e2
%+
37
$!a
3e1
%=
=67"
a e1 +67"
a e2 !17a e1 =
$ 67"
! 17
%a e1 +
67"
a e2 .
Stefano Siboni 2575

Universita degli studi di Trento Esercizi di Meccanica razionale
E utile fornire anche una stima numerica delle coordinate di G:
G ! O = 0.12998 a e1 + 0.27284 a e2 ,
dalla quale si deduce che il baricentro si colloca all’interno della lamina Q, essendo$ 6
7"! 1
7
%a / 0.12998 a > 0
67"
a / 0.27284 a > 0
e
|G !O| ="$ 6
7"! 1
7
%2a2 +
$ 67"
%2a2 / 0.3022165 a < a .
(b) Matrice d’inerzia del sistemaLa matrice d’inerzia del sistema in Oxyz viene calcolata facendo uso della proprieta additiva,come somma delle matrici d’inerzia della piastra Q e dell’asta OA. Questo approccio e resopossibile dalla circostanza che l’intersezione Q 2 OA consta del solo punto O, il quale nonconcorre in alcun modo agli integrali, curvilinei e di superficie, che definiscono gli elementidelle due matrici.
Matrice d’inerzia della piastra QLa matrice d’inerzia della piasta Q rispetto alla terna Oxyz risulta
[LQO] =
/
01LQ
xx LQxy 0
LQxy LQ
yy 00 0 LQ
xx + LQyy
2
34 = µa2
/
011/5 !2/5" 0
!2/5" 1/5 00 0 2/5
2
34 .
La struttura della matrice segue dall’ubicazione di questa nel piano coordinato Oxy. Ilmomento d’inerzia rispetto all’asse Ox si determina per mezzo dell’integrale doppio:
LQxx =
6
Q
y2& dA =a6
0
d% %
#/26
0
d! (% sin !)24µ
"a3% =
4µ
"a3
a6
0
%4d%
#/26
0
sin2! d! =
=4µ
"a3
a5
5
#/26
0
1 ! cos 2!
2d! =
45"
µa2
-!
2! sin 2!
4
.#/2
0
=45"
µa2 "
4=
15µa2
mentre per quello relativo ad Oy si ha
LQyy =
6
Q
x2& dA =a6
0
d% %
#/26
0
d! (% cos !)24µ
"a3% =
4µ
"a3
a6
0
%4d%
#/26
0
cos2! d! =
=4µ
"a3
a5
5
#/26
0
1 + cos 2!
2d! =
45"
µa2
-!
2+
sin 2!
4
.#/2
0
=45"
µa2 "
4=
15µa2,
Stefano Siboni 2576

Universita degli studi di Trento Esercizi di Meccanica razionale
come era peraltro lecito attendersi in base a considerazioni di simmetria. L’unico prodottod’inerzia non banale vale infine:
LQxy = !
6
Q
xy & dA = !a6
0
d% %
#/26
0
d! % cos ! % sin!4µ
"a3% =
= ! 4µ
"a3
a6
0
%4d%
#/26
0
sin! cos ! d! = ! 4µ
"a3
a5
5
-sin2!
2
.#/2
0
= ! 45"
µa2 12
= ! 25"
µa2.
Matrice d’inerzia dell’asta OAPer la matrice d’inerzia in Oxyz dell’asta OA si ha la semplice espressione
[LOAO ] =
/
10 0 00 LOA
yy 00 0 LOA
yy
2
4 = µa2
/
10 0 00 1/12 00 0 1/12
2
4
dovuta alla completa collocazione dell’asta lungo l’asse Ox. L’unico momento d’inerzia nonnullo si determina mediante l’integrale unidimensionale:
LOAyy =
6
OA
x2, ds =06
!a
x2 µ
a2(a + x)dx =
µ
a2
06
!a
(ax2 + x3)dx =
=µ
a2
-ax3
3+
x4
4
.0
!a
=µ
a2
$a4
3! a4
4
%=
112
µa2.
Matrice d’inerzia del sistemaLa somma delle matrici d’inerzia parziali di lamina e asta fornisce la matrice d’inerzia delsistema cercata:
[LO] = [LQO] + [LOA
O ] = µa2
/
011/5 !2/5" 0
!2/5" 1/5 00 0 2/5
2
34+ µa2
/
10 0 00 1/12 00 0 1/12
2
4 =
= µa2
/
011/5 !2/5" 0
!2/5" 17/60 00 0 29/60
2
34 . (496.1)
(c) Momento d’inerzia del sistema rispetto all’asse y + 2x = 0 in OxyNel piano Oxy la retta di equazione y + 2x = 0 passa per l’origine O ed e descritta dallaparametrizzazione
P (x) ! O = x e1 ! 2x e2 , x " R ,
Stefano Siboni 2577

Universita degli studi di Trento Esercizi di Meccanica razionale
cui corrisponde il versore tangente (o direttore)
n =P "(x)|P "(x)| =
e1 ! 2 e2
|e1 ! 2 e2|=
e1 ! 2 e2$5
=1$5
e1 !2$5
e2 .
Il momento d’inerzia del sistema rispetto alla retta e dunque dato da
IOn = n · LO(n) =$ 1$
5! 2$
50%µa2
/
011/5 !2/5" 0
!2/5" 17/60 00 0 29/60
2
34
/
11/
$5
!2/$
50
2
4 =
=15µa2(1 ! 2 0)
/
011/5 !2/5" 0
!2/5" 17/60 00 0 29/60
2
34
/
11!20
2
4 =
=15µa2
-15
+1760
(!2)2 + 2$! 2
5"
%(!2)
.=$ 4
15+
825"
%µa2.
(d) Momento d’inerzia relativo alla retta x = a in OxyIl momento d’inerzia relativo alla retta x = a nel piano Oxy si calcola facilmente in terminidel teorema di Huygens-Steiner, considerando gli assi paralleli Oy, Gy e x = a. Indicata conx
G=@
67# ! 1
7
Aa l’ascissa del baricentro, si hanno infatti le relazioni:
Ix=a = IGy + m(a ! xG
)2 IOy = IGy + mx2G
dalle quali, sottraendo membro a membro, si ottiene
Ix=a ! IOy = m(a ! xG
)2 ! mx2G
e dunque
Ix=a = IOy + m(a ! xG
)2 ! mx2G
= Lyy + m(a ! xG
)2 ! mx2G
=
Stefano Siboni 2578

Universita degli studi di Trento Esercizi di Meccanica razionale
=1760
µa2 +76µ$1 ! 6
7"+
17
%2a2 ! 7
6µ$ 6
7"! 1
7
%2a2 =
=-1760
! 76
$ 67"
! 17
%2+
76
$87! 6
7"
%2.µa2 =
$10760
! 2"
%µa2.
Da notare che il valore calcolato e di segno positivo, come imposto dalla definizione delmomento d’inerzia:
Ix=a / 1.146713561µa2 > 0 .
(e) Equilibratura dinamica attorno all’asse OxSi vogliono determinare le coordinate x
P, y
Pdel punto P , di massa µ, saldato al sistema
rigido, in modo che il sistema cosı modificato risulti equilibrato dinamicamente attornoall’asse fisso Ox. L’equilibratura dinamica del sistema attorno all’asse richiede preliminar-mente che il nuovo baricentro G" del sistema sia collocato lungo Ox (equilibratura statica)e in subordine che il versore e1 associato all’asse sia un autovettore dell’operatore d’inerziain G" del nuovo sistema.
Equilibratura staticaIl baricentro G" del sistema modificato con l’aggiunta del punto P deve collocarsi lungol’asse fisso Ox. Usando la proprieta distributiva per ricavare G" ed imponendo che la relativaordinata sia nulla si perviene all’equazione
0 = e2 · (G" ! O) = e2 ·m(G !O) + µ(x
Pe1 + y
Pe2)
m + µ
che equivale allam(G ! O) · e2 + µy
P= 0 .
Ne deriva che l’ordinata di P e individuata univocamente dalla condizione di equilibraturastatica:
yP
= ! 1µ
m(G ! O) · e2 = ! 1µ
76µ
67"
a = ! 1"
a . (496.2)
Equilibratura dinamicaLa proprieta additiva consente di scrivere la matrice d’inerzia in Oxyz del nuovo sistemanella forma
[L"O] = [LO] + µ
/
1y2
P!x
Py
P0
!xP
yP
x2P
00 0 x2
P+ y2
P
2
4 .
Dal teorema di Huygens-Steiner generalizzato segue allora che la matrice d’inerzia del sistemamodificato rispetto alla terna G"xyz vale
[L"G!] = [L"
O] ! (m + µ)
/
10 0 00 x2
G! 00 0 x2
G!
2
4 =
Stefano Siboni 2579

Universita degli studi di Trento Esercizi di Meccanica razionale
= [LO] +
/
01µy2
P!µx
Py
P0
!µxP
yP
µx2P! (m + µ)x2
G! 00 0 µ(x2
P+ y2
P) ! (m + µ)x2
G!
2
34
essendo G" " Ox. Si deve richiedere che Ox sia un asse centrale d’inerzia, ossia che e1
costituisca un autovettore dell’operatore d’inerzia in G" del sistema modificato. Cio equivalead imporre, per un qualche scalare , opportuno, la condizione
[L"G! ]
/
1100
2
4 = ,
/
1100
2
4
ovvero
[LO]
/
1100
2
4+
/
1µy2
P!µx
Py
P0
2
4 =
/
1,00
2
4
e ricordando l’espressione (496.1) per [LO]/
001
15µa2 + µy2
P
! 25"
µa2 ! µxP
yP
0
2
334 =
/
1,00
2
4 .
La condizione necessaria e su!ciente per l’equilibratura dinamica e quindi che si annulli laseconda componente del vettore colonna a primo membro
! 25"
µa2 ! µxP
yP
= 0
equazione che per la (496.2) diventa
! 25"
µa2 ! µxP
$! 1
"a%
= 0
e definisce univocamente l’ascissa xP
del punto saldato
xP
=25a .
In conclusione, il punto P di massa µ deve essere fissato al sistema nella posizione
P ! O =25a e1 !
1"
a e2 ,
che appartiene alla lamina S, avendosi
25a > 0 ! 1
"a < 0 |P ! O| =
"$25a%2
+$! 1
"a%2
< a .
Stefano Siboni 2580

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 497. Sistema scleronomo a 1 g.d.l. posizionale conservativoUn disco omogeneo, di centro C , massa m e raggio R, rotola senza strisciare all’internodi una guida circolare fissa di raggio 3R e centro nell’origine di un riferimento cartesianoortogonale Oxy. Nel centro del disco e incernierato un estremo dell’asta AC , omogenea, dimassa m e lunghezza 2R; l’altro estremo A e vincolato a scorrere lungo l’asse Oy. Il sistemae pesante e una molla ideale di costante elastica k collega i punti O ed A.
Supposti i vincoli ideali, si ricorra all’angolo 2 " [!"/3,"/4] in figura come parametrolagrangiano per determinare del sistema:
(a) gli equilibri ordinari;(b) le proprieta di stabilita degli equilibri ordinari;(c) l’espressione dell’energia cinetica;(d) le equazioni pure del moto;(e) gli equilibri di confine.
Soluzione(a) Equilibri ordinariPer il calcolo degli equilibri ordinari basta osservare che il sistema e scleronomo posizionalee conservativo, in quanto tutte le forze agenti su di esso ammettono potenziale — il pesoe l’interazione elastica associata alla molla fra i punti C ed A. Per brevita, nel seguito siindichera con D il disco circolare omogeneo di centro C , raggio R e massa m.
Potenziale gravitazionaleAl potenziale gravitazionale concorrono tanto il disco quanto l’asta, ciascuno con un propriocontributo. Osservato che il baricentro di disco e asta omogenei coincidono rispettivamentecon il centro C del disco e con il punto medio G del segmento AC , e facile ricavare i vettori
Stefano Siboni 2581

Universita degli studi di Trento Esercizi di Meccanica razionale
posizione:C ! O = 2R sin 2 e1 ! 2R cos 2 e2
G !O = C ! O + G ! C = 2R sin 2 e1 ! 2R cos 2 e2 ! R sin 2 e1 ! R cos 2 e2 == R sin2 e1 ! 3R cos 2 e2
e scrivere per il potenziale gravitazionale del sistema l’espressione:
Ug = !mg e2 · (C ! O) ! mg e2 · (G ! O) = 2mgR cos 2 + 3mgR cos 2 = 5mgR cos 2 .
Potenziale elasticoL’estremo A della molla ideale ha vettore posizione
A ! O = !4R cos 2 e2
per cui il potenziale elastico associato alla molla diventa
Uel = !k
2(A ! O)2 = !k
216R2cos22 = !8kR2cos22 .
Potenziale del sistemaLa somma dei potenziali gravitazionale ed elastico conduce al potenziale del sistema:
U(2) = Ug + Uel = 5mgR cos 2 ! 8kR2cos22 2 " [!"/3,"/4] . (497.1)
Equilibri ordinariGli equilibri ordinari sono i punti critici del potenziale presenti nell’interno dell’intervallodi definizione della parametrizzazione. Poiche la derivata prima del potenziale (497.1) e lafunzione
U "(2) = !5mgR sin2 + 16kR2 cos 2 sin 2 2 " [!"/3,"/4] ,
la condizione per gli equilibri ordinari diventa:
!5mgR sin 2 + 16kR2 cos 2 sin 2 = 0 2 " (!"/3,"/4)
e porge l’equazione equivalente:
16kR2 sin 2$! 5mg
16kR+ cos 2
%= 0 2 " (!"/3,"/4) .
Ne seguono — per sin 2 = 0 — due radici definite incondizionatamente:
2 = 0 2 = " ,
ed altrettante definite e distinte dalle precedenti a condizione che si abbia 5mg/16kR < 1:
2 = arccos$ 5mg
16kR
%:= 2) " (0,"/2) 2 = !2) .
Stefano Siboni 2582

Universita degli studi di Trento Esercizi di Meccanica razionale
In e"etti, l’ulteriore richiesta che sia !"/3 < 2 < "/4 comporta che la radice 2 = "debba essere esclusa dal novero degli equilibri ordinari del sistema, mentre 2 = 0 e sempreaccettabile. Per la soluzione 2 = 2) " (0,"/2) deve invece richiedersi che sia:
0 < arccos$ 5mg
16kR
%<
"
4
ossia1 >
5mg
16kR>
1$2
,
essendo la funzione coseno strettamente decrescente nell’intervallo (0,"/2). Infine, per laconfigurazione ordinaria di equilibrio 2 = !2) " (!"/2, 0) si ha la condizione di esistenza:
!"
3< ! arccos
$ 5mg
16kR
%< 0
che equivale a12
<5mg
16kR< 1
in quanto il coseno e una funzione crescente nell’intervallo (!"/2, 0). Concludendo, gliequilibri ordinari del sistema sono:
. 2 = 0, sempre definita;
. 2 = +arccos(5mg/16kR), purche si abbia 1/$
2 < 5mg/16kR < 1, e. 2 = ! arccos(5mg/16kR), a condizione che risulti 1/2 < 5mg/16kR < 1.
(b) Stabilita degli equilibri ordinariLo studio della stabilita degli equilibri ordinari viene condotto per mezzo dei teoremi diLagrange-Dirichlet e di inversione parziale, grazia alla natura posizionale conservativa delsistema scleronomo. La derivata seconda del potenziale e data da:
U ""(2) = !5mgR cos 2 + 16kR2(cos22 ! sin22)
e deve essere calcolata in ciascuna configurazione di equilibrio del sistema.
Configurazione 2 = 0Nella fattispecie la derivata seconda del potenziale non ha segno definito:
U ""(0) = !5mgR + 16kR2 = 16kR2$1 ! 5mg
16kR
%
ed obbliga a considerare tre diversi casi:
(i) se 5mg/16kR > 1 la derivata seconda del potenziale ha segno negativo ed individua laconfigurazione come un massimo relativo proprio del potenziale, stabile per Lagrange-Dirichlet;
Stefano Siboni 2583

Universita degli studi di Trento Esercizi di Meccanica razionale
(ii) per 5mg/16kR < 1 si ha U ""(0) > 0 e l’equilibrio e instabile per l’inversione parziale diLagrange-Dirichlet;
(iii) se infine 5mg/16kR = 1 risulta U ""(0) = 0 e ricorre un caso critico di stabilita, analizz-abile con una approssimazione di Taylor di U nell’intorno di 2 = 0 al quarto ordine:
U(2) = 8kR2 +14!
(!48kR2)24 + O(25) = 8kR2 ! 2kR224 + O(25)
che mostra come la configurazione sia in e"etti un massimo relativo proprio del poten-ziale, la cui stabilita e assicurata dal teorema di Lagrange-Dirichlet.
Configurazioni simmetriche 2 = 2) e 2 = !2)
In queste due configurazioni la derivata seconda del potenziale assume lo stesso valore neg-ativo:
U ""(2)) = !5mgR cos 2) + 16kR2(cos22) ! sin22)) =
= 16kR2$! 5mg
16kRcos 2) + cos22) ! sin22)
%= !16kR2sin22)
dato che cos 2) = 5mg/16kR e 2) " (0,"/2). Entrambe le configurazioni, quando definite,sono dunque stabili per Lagrange-Dirichlet.
(c) Energia cineticaL’energia cinetica del sistema risulta dalla somma delle energie cinetiche delle due partirigide costituenti il sistema, il disco e l’asta AC , energie che e opportuno determinare sepa-ratamente.
Energia cinetica del discoIl disco e privo di punti fissi e la sua energia cinetica viene valutata mediante il teorema diKonig:
TD =m
2C2 +
12IDCz|*#D|2 . (497.2)
Basta osservare che il baricentro del disco coincide con il suo centro geometrico — e disimmetria:
C ! O = 2R sin 2 e1 ! 2R cos 2 e2
ed ha velocita istantanea
C = (2R cos 2 e1 + 2R sin 2 e2)2
con modulo quadrato:C2 = 4R222.
Il momento del disco rispetto all’asse baricentrale Cz vale inoltre
IDCz =
mR2
2.
Stefano Siboni 2584

Universita degli studi di Trento Esercizi di Meccanica razionale
Infine, poiche il disco di raggio R rotola senza strisciare sul bordo interno della guida circolaredi raggio 3R, la velocita angolare di D e espressa dalla nota relazione:
*#D = !$3R
R! 1
%2 e3 = !22 e3 .
Inserendo questi dati nella formula di Konig (497.2) si ottiene allora:
TD =m
24R222 +
12
mR2
2|! 22 e3|2 = 2mR222 + mR222 = 3mR222.
Energia cinetica dell’asta ACPer l’asta AC , priva anch’essa di assi fissi, si ricorre ancora al teorema di Konig e si scrivel’energia cinetica nella forma:
TAC =m
2G2 +
12ICAGz |*#CA|2
dove il baricentro G coincide con il punto medio del segmento CA ed e individuato dalvettore posizione:
G ! O = C ! O + G ! C = C ! O +A ! C
2=
= 2R sin2 e1 ! 2R cos 2 e2 ! R sin2 e1 !R cos 2 e2 = R sin2 e1 ! 3R cos 2 e2
cui corrisponde la velocita istantanea
G = R(cos 2 e1 + 3 sin 2 e2)2 ,
mentre il momento d’inerzia dell’asta rispetto all’asse baricentrale Gz risulta
IACGz =
m(2R)2
12=
mR2
3
e la velocita angolare dell’asta vale
*#AC = !2 e3
in quanto l’angolo OAC e alla base del triangolo isoscele OAC e coincide percio con 2 ameno dell’orientamento — i due angoli sono l’uno l’immagine speculare dell’altro. Ne derivache:
TAC =m
2|R(cos 2 e1 + 3 sin 2 e2)2|2 +
12
mR2
3|! 2 e3|2 =
=mR2
2(cos22 + 9sin22)22 +
mR2
622 =
mR2
2
$43
+ 8 sin22%22 .
Stefano Siboni 2585

Universita degli studi di Trento Esercizi di Meccanica razionale
Energia cinetica del sistemaPer ricavare l’energia cinetica dell’intero sistema basta ora sommare le energie cinetiche delledue parti rigide che lo costituiscono, il disco D e l’asta AC :
T = TD + TAC = 3mR222 +mR2
2
$43
+ 8 sin22%22 =
mR2
2
$223
+ 8 sin22%22.
(d) Equazioni pure del motoLa dinamica del sistema, olonomo ad un grado di liberta e a vincoli ideali, e governatadall’unica equazione di Lagrange:
d
dt
$.L
.2
%! .L
.2= 0
con lagrangiana:
L = T + U =mR2
2
$223
+ 8 sin22%22 + 5mgR cos 2 ! 8kR2cos22 .
Si hanno allora le espressioni:
.L
.2= mR2
$223
+ 8 sin22%2
d
dt
$.L
.2
%= mR2
$223
+ 8 sin22%2 + 16mR2 sin2 cos 2 22
.L
.2= 8mR2 sin2 cos 2 22 ! 5mgR sin 2 + 16kR2 sin 2 cos 2
dalle quali segue l’equazione pura del moto:
mR2$22
3+ 8 sin22
%2 + 8mR2 sin2 cos 2 22 + 5mgR sin 2 ! 16kR2 sin 2 cos 2 = 0 .
(e) Equilibri di confineIl sistema presenta due configurazioni di confine, per 2 = !"/3 e per 2 = "/4. Per individ-uare gli eventuali equilibri di confine si fa riferimento al teorema dei lavori virtuali.
Configurazione 2 = !"/3In questo caso la condizione di equilibrio espressa dal teorema dei lavori virtuali assume laforma:
U "(!"/3) 32 ' 0 % 32 ( 0
ovveroU "(!"/3) ' 0 .
Ne deriva che la configurazione e un equilibrio di confine del sistema se e solo se:
U "(!"/3) = !5mgR sin2 + 16kR2 sin 2 cos 2!!!&=!#/3
=
= 5mgR sin$"
3
%! 16kR2 sin
$"
3
%cos$"
3
%= 4
$3 kR2
$5mg
8kR! 1
%' 0
Stefano Siboni 2586

Universita degli studi di Trento Esercizi di Meccanica razionale
cioe per 5mg/8kR ' 1.
Configurazione 2 = "/4Il teorema dei lavori virtuali stabilisce che questa configurazione sia di equilibrio se e soltantose
U "("/4) 32 ' 0 % 32 ' 0 ,
condizione che equivale aU "("/4) ( 0 .
La componente generalizzata delle forze attive in 2 = "/4 vale:
U "("/4) = !5mgR sin 2 + 16kR2 sin 2 cos 2!!!&=#/4
=
=1$2
$!5mgR + 16kR2 1$
2
%= 8kR2
$1 ! 5
$2
16mg
kR
%
per cui la configurazione e di equilibrio se e solo se 1 ( 5$
2mg/16kR.
Esercizio 498. Equilibrio di un corpo appoggiatoUn sistema rigido pesante e appoggiato su un piano orizzontale liscio e debolmente cedevole,che si puo identificare con il piano coordinato Oxy di una terna cartesiana ortogonale Oxyz 5Oe1e2e3. Nel piano Oxy i punti di appoggio sono:
P1(0, 0) P2(3, 0) P3(2, 1) P4(3, 2) P5(0, 2)
Sapendo il baricentro G del sistema e individuato da G ! O = e1 + e2 + e3, determinare:
(a) se la configurazione del sistema e di equilibrio;(b) l’area di completo appoggio del sistema;(c) le reazioni vincolari esterne agenti sul sistema (in quiete) nei punti di appoggio.
Soluzione(a) EquilibrioLa condizione necessaria e su!ciente per l’equilibrio e che il centro di pressione C delcorpo rigido appartenga all’inviluppo convesso della relativa base d’appoggio — poligonod’appoggio. Riportando i punti d’appoggio sul piano Oxy appare evidente che l’inviluppoconvesso della base d’appoggio {P1, P2, P3, P4, P5} e constituito dal rettangolo chiuso di ver-tici P1, P2, P4, P5. Il centro di pressione C e la proiezione ortogonale del baricentro G sulpiano d’appoggio e viene quindi individuato dal vettore posizione
C ! O = e1 + e2 .
Risulta chiaro che C appartiene al poligono d’appoggio e che, pertanto, la configurazione edi equilibrio per il sistema.
Stefano Siboni 2587

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Area di completo appoggioPer ipotesi il piano d’appoggio del corpo e debolmente cedevole. I relativi coe!cienti distruttura a, b, c del sistema vengono determinati dall’equazione matriciale
S
/
1abc
2
4 = mg
/
1xC
yC
1
2
4 ,
nella quale xC = 1, yC = 1 stanno ad indicare le coordinate del centro di pressione, mentreS e la matrice simmetrica
S =
/
1Sxx Sxy Sx
Sxy Syy Sy
Sx Sy ##
2
4 =
/
122 8 88 9 58 5 5
2
4
i cui elementi sono calcolati come segue:
Sxx =59
i=1
x2i = 02 + 32 + 22 + 32 + 02 = 22
Sxy =59
i=1
xiyi = 0 · 0 + 3 · 0 + 2 · 1 + 3 · 2 + 0 · 2 = 8
Sx =59
i=1
xi = 0 + 3 + 2 + 3 + 0 = 8
Syy =59
i=1
y2i = 02 + 02 + 12 + 22 + 22 = 9
Sy =59
i=1
yi = 0 + 0 + 1 + 2 + 2 = 5
## =59
i=1
1 = 5
con l’ovvia notazione Pi ! O = xi e1 + yie2, i = 1, . . . , 5. Si ottiene allora:/
1abc
2
4 = S!1mg
/
1xC
yC
1
2
4 = mg
/
15/46 0 !4/23
0 1/4 !1/4!4/23 !1/4 67/92
2
4
/
1xC
yC
1
2
4 .
Le reazioni vincolari esterne applicate ai punti Pi(xi, yi, 0), i = 1, 2, 3, 4, 5, della based’appoggio si scrivono nella forma *$i = $i e3, i = 1, 2, 3, 4, 5, dove le componenti verti-cali $i sono individuate in termini dei coe!cienti di struttura per mezzo delle relazioni:
$i = (xi yi 1)
/
1abc
2
4 = mg(xi yi 1)
/
15/46 0 !4/23
0 1/4 !1/4!4/23 !1/4 67/92
2
4
/
1xC
yC
1
2
4
Stefano Siboni 2588

Universita degli studi di Trento Esercizi di Meccanica razionale
e, a!nche ricorra in ogni Pi una posizione di e"ettivo appoggio del corpo, devono risultaretutte strettamente positive. Le posizioni del centro di pressione (xC , yC) per le quali lacomponente verticale $1, la sola non banale, della reazione vincolare in P1 risulta positivasono individuate da tutte e sole le coordinate (x, y) tali che
$1 = (0 0 1)mgS!1
/
1xy1
2
4 = mg$! 4
23! 1
46792
%/
1xy1
2
4 = mg$! 4
23x ! 1
4y +
6792
%> 0 .
Condizioni analoghe sussistono per gli altri punti della base di appoggio:
$2 = (3 0 1)mgS!1
/
1xy1
2
4 = mg$ 7
46! 1
41992
%/
1xy1
2
4 =
= mg$ 7
46x ! 1
4y +
1992
%> 0
$3 = (2 1 1)mgS!1
/
1xy1
2
4 = mg$ 1
230 ! 61
46
%/
1xy1
2
4 =
= mg$ 1
23x +
323
%> 0
$4 =$3 2 1
%mgS!1
/
1xy1
2
4 = mg$ 7
4614
! 2792
%/
1xy1
2
4 =
= mg$ 7
46x +
14y ! 27
92
%> 0
$5 =$0 2 1
%mgS!1
/
1xy1
2
4 = mg$! 4
2314
2192
%/
1xy1
2
4 =
= mg$! 4
23x +
14y +
2192
%> 0.
Il poligono di completo appoggio e quindi costituito da tutti e soli i punti individuati dallecoordinate (x, y) che risolvono il sistema di disequazioni lineari omogenee
'(((((((((((((()
((((((((((((((*
! 423
x ! 14y +
6792
> 0
746
x ! 14y +
1992
> 0
123
x +323
> 0
746
x +14y ! 27
92> 0
! 423
x +14y +
2192
> 0
(498.1)
Stefano Siboni 2589
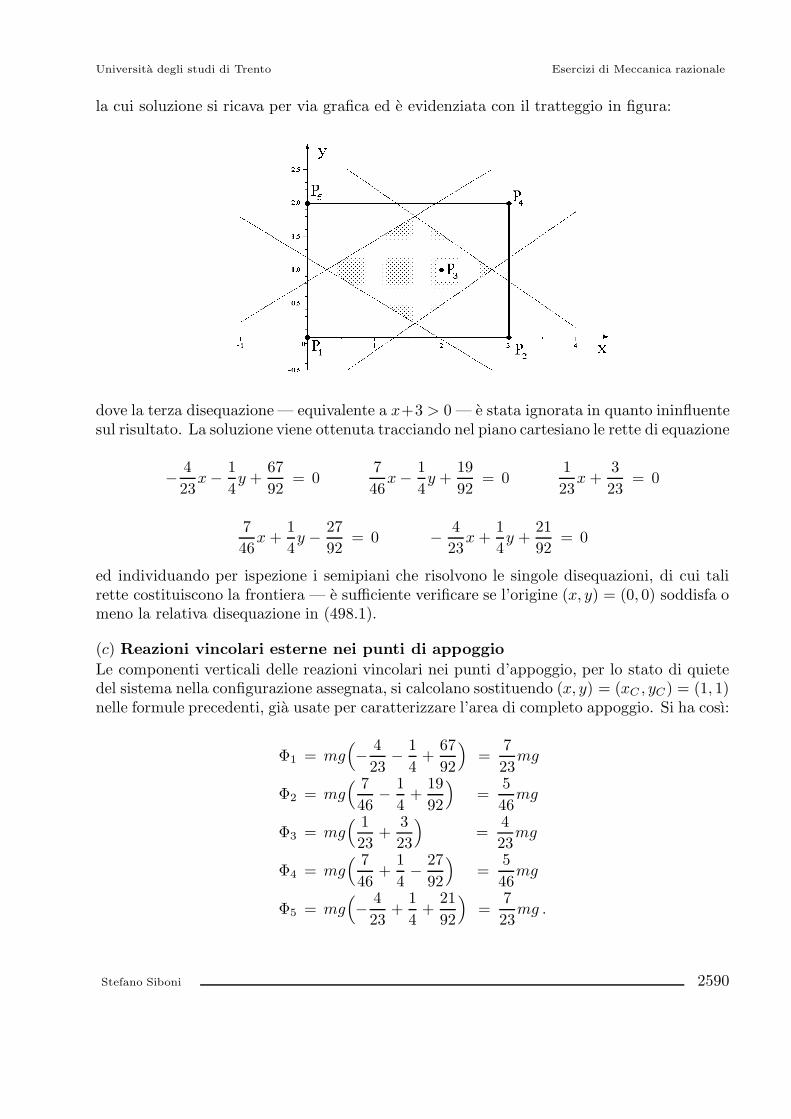
Universita degli studi di Trento Esercizi di Meccanica razionale
la cui soluzione si ricava per via grafica ed e evidenziata con il tratteggio in figura:
dove la terza disequazione — equivalente a x+3 > 0 — e stata ignorata in quanto ininfluentesul risultato. La soluzione viene ottenuta tracciando nel piano cartesiano le rette di equazione
! 423
x ! 14y +
6792
= 0746
x ! 14y +
1992
= 0123
x +323
= 0
746
x +14y ! 27
92= 0 ! 4
23x +
14y +
2192
= 0
ed individuando per ispezione i semipiani che risolvono le singole disequazioni, di cui talirette costituiscono la frontiera — e su!ciente verificare se l’origine (x, y) = (0, 0) soddisfa omeno la relativa disequazione in (498.1).
(c) Reazioni vincolari esterne nei punti di appoggioLe componenti verticali delle reazioni vincolari nei punti d’appoggio, per lo stato di quietedel sistema nella configurazione assegnata, si calcolano sostituendo (x, y) = (xC , yC) = (1, 1)nelle formule precedenti, gia usate per caratterizzare l’area di completo appoggio. Si ha cosı:
$1 = mg$! 4
23! 1
4+
6792
%=
723
mg
$2 = mg$ 7
46! 1
4+
1992
%=
546
mg
$3 = mg$ 1
23+
323
%=
423
mg
$4 = mg$ 7
46+
14! 27
92
%=
546
mg
$5 = mg$! 4
23+
14
+2192
%=
723
mg .
Stefano Siboni 2590

Universita degli studi di Trento Esercizi di Meccanica razionale
Da notare che:(i) le componenti sono tutte positive, provando cosı che il centro di pressione appartiene
all’area di completo appoggio e non semplicemente al poligono d’appoggio del corpo;(ii) la somma delle reazioni e pari al peso totale del corpo rigido
59
i=1
$i = mg$ 7
23+
546
+423
+546
+723
%= mg
come imposto dalla prima equazione cardinale della statica.
Esercizio 499. Oscillatore armonico smorzato con forzante sinusoidaleUn punto materiale di massa unitaria puo muoversi lungo l’asse Ox sotto l’azione di:! una resistenza viscosa di costante ( = 1/2;! una forza elastica di costante k = 15, che lo richiama verso l’origine x = 0;! una forza diretta lungo Ox del tipo 5 cos(#t), con # = 2
$3.
Assunti trascurabili gli attriti, determinare:
(a) il moto del sistema per grandi t (moto di regime);(b) qualora fosse possibile modificare tale parametro, il valore di # per il quale il sistema
entrerebbe in risonanza;(c) l’ampiezza di oscillazione del sistema, per grandi t, in condizioni di risonanza.
SoluzioneL’equazione pura del moto del sistema e data da
x = !12x ! 15x + 5 cos(2
$3 t)
ossiax +
12x + 15x = 5 cos(2
$3 t) (499.1)
che coincide con quella di un oscillatore armonico smorzato soggetto alla forzante sinusoidale5 cos(2
$3 t).
(a) Moto di regimeLa soluzione generale dell’equazione (499.1) si ricava sommando la soluzione generale dell’e-quazione omogenea associata
x +12x + 15x = 0 (499.2)
ad una soluzione particolare che puo sempre cercarsi della forma
A cos(2$
3 t + ') % t " R , (499.3)
Stefano Siboni 2591

Universita degli studi di Trento Esercizi di Meccanica razionale
con A ed ' costanti reali opportune. Poiche, al solito, l’equazione caratteristica di (499.2)
,2 +12, + 15 = 0
ammette due radici complesse coniugate con parte reale negativa
,± =12
$!1
2±"
14! 60
%= !1
4± i
14$
239 ,
le soluzioni di (499.2) rappresentano tutte moti oscillatori smorzati che tendono esponenzial-mente a zero per t * +), e che possono quindi trascurarsi per tempi abbastanza grandi. Ilmoto di regime del sistema e cosı descritto dalla sola soluzione (499.3). Sostituendo (499.3)in (499.1) si ottiene:
A
-!12 cos(2
$3 t + ') ! 1
22$
3 sin(2$
3 t + ') + 15 cos(2$
3 t + ').
= 5 cos(2$
3 t)
ossiaAJ3 cos(2
$3 t + ') !
$3 sin(2
$3 t + ')
K= 5 cos(2
$3 t)
e quindi
A 2$
3-$
32
cos(2$
3 t + ') ! 12
sin(2$
3 t + ').
= 5 cos(2$
3 t) . (499.4)
Notato che $3
2= cos("/6) e
12
= sin("/6) ,
l’equazione (499.4) diventa allora:
A 2$
3Jcos("/6) cos(2
$3 t + ') ! sin("/6) sin(2
$3 t + ')
K= 5 cos(2
$3 t)
ovveroA cos
$2$
3 t + ' +"
6
%=
52$
3cos(2
$3 t) % t " R ,
per cui
A =5
2$
3e ' = !"
6.
Per il moto di regime si perviene cosı all’espressione
x(t) =5
2$
3cos
$2$
3 t ! "
6
%% t " R .
Stefano Siboni 2592

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Pulsazione di risonanzaSe la pulsazione # della forzante sinusoidale non e preassegnata l’equazione del moto diventa
x +12x + 15x = 5 cos(#t)
ed ammette la soluzione stazionaria (o di regime)
A cos(#t + ')
per A ed ' reali opportuni, dipendenti da #. Si ha allora l’identita trigonometrica
A
-!#2 cos(#t + ') ! 1
2# sin(#t + ') + 15 cos(#t + ')
.= 5 cos(#t) % t " R
che si semplifica in
A
-(15 !#2) cos(#t + ') ! 1
2# sin(#t + ')
.= 5 cos(#t)
e fornisce
A
:
;;<15 ! #2
"(15 ! #2)2 +
#2
4
cos(#t + ') ! #/2"(15 !#2)2 +
#2
4
sin(#t + ')
=
>>? =
=5"
(15 ! #2)2 +#2
4
cos(#t)
e poiche l’espressione entro parentesi quadrate si riduce immediatamente a cos(#t) scegli-endo ' come funzione appropriata di #, ne deriva che l’ampiezza di oscillazione del moto diregime vale
A =5"
(15 ! #2)2 +#2
4
. (499.5)
Il sistema risulta risonante se A e massima, il che avviene quando il polinomio
P(#2) = (15 ! #2)2 +#2
4assume il proprio valore minimo. Questo e individuato dalla condizione
P "(#2) = 2(#2 ! 15) +14
= 0
che porge
#2 = 15 ! 18
=1198
.
La pulsazione di risonanza e cosı
# = #r ="
1198
.
Stefano Siboni 2593
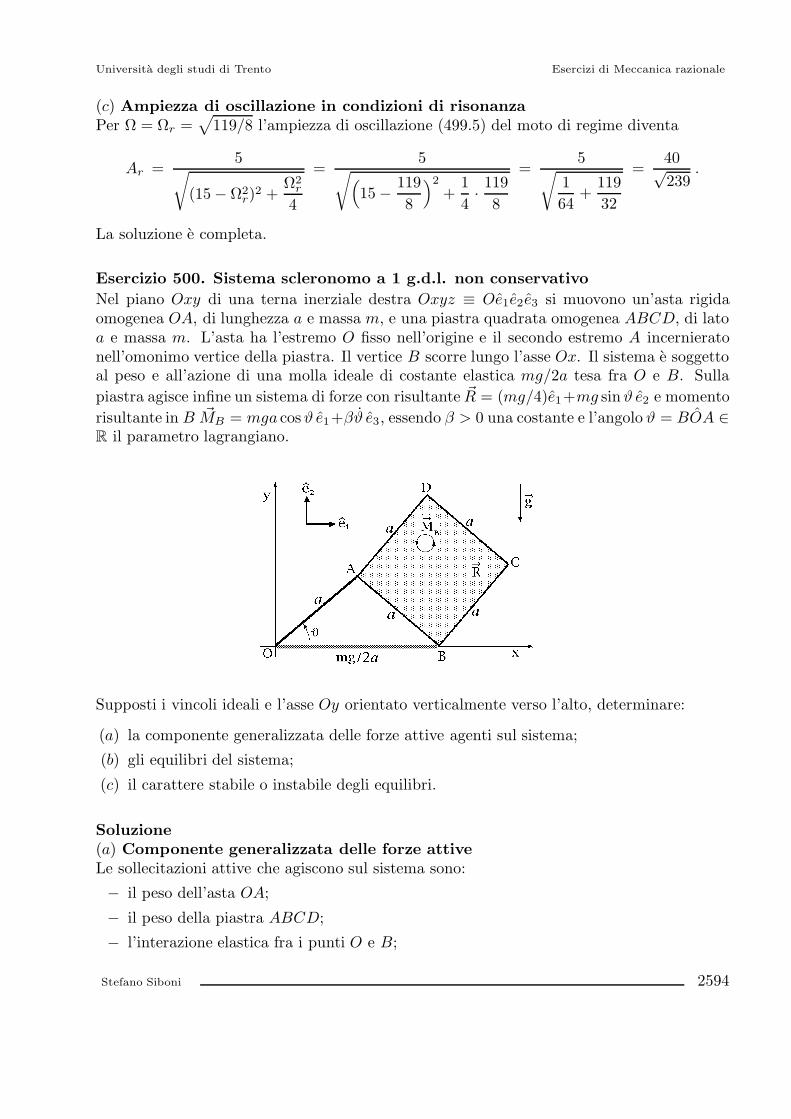
Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Ampiezza di oscillazione in condizioni di risonanzaPer # = #r =
5119/8 l’ampiezza di oscillazione (499.5) del moto di regime diventa
Ar =5"
(15 ! #2r)2 +
#2r
4
=5"$
15 ! 1198
%2+
14· 119
8
=5"
164
+11932
=40$239
.
La soluzione e completa.
Esercizio 500. Sistema scleronomo a 1 g.d.l. non conservativoNel piano Oxy di una terna inerziale destra Oxyz 5 Oe1e2e3 si muovono un’asta rigidaomogenea OA, di lunghezza a e massa m, e una piastra quadrata omogenea ABCD, di latoa e massa m. L’asta ha l’estremo O fisso nell’origine e il secondo estremo A incernieratonell’omonimo vertice della piastra. Il vertice B scorre lungo l’asse Ox. Il sistema e soggettoal peso e all’azione di una molla ideale di costante elastica mg/2a tesa fra O e B. Sullapiastra agisce infine un sistema di forze con risultante *R = (mg/4)e1+mg sin 2 e2 e momentorisultante in B *MB = mga cos 2 e1+(2 e3, essendo ( > 0 una costante e l’angolo 2 = BOA "R il parametro lagrangiano.
Supposti i vincoli ideali e l’asse Oy orientato verticalmente verso l’alto, determinare:
(a) la componente generalizzata delle forze attive agenti sul sistema;(b) gli equilibri del sistema;(c) il carattere stabile o instabile degli equilibri.
Soluzione(a) Componente generalizzata delle forze attiveLe sollecitazioni attive che agiscono sul sistema sono:! il peso dell’asta OA;! il peso della piastra ABCD;! l’interazione elastica fra i punti O e B;
Stefano Siboni 2594

Universita degli studi di Trento Esercizi di Meccanica razionale
! il sistema di forze applicate alla piastra con risultante *R e momento risultante in B,*MB, noti — per brevita, tale sistema si denotera con S.
Si determinano le componenti generalizzate di ogni sollecitazione.
Peso di OASi tratta di una sollecitazione posizionale conservativa di potenziale
UOAg = !mg e2 ·
A ! O
2
dove il vettore posizione del baricentro dell’asta omogenea, il relativo punto medio, e datoda
A !O
2=
a
2cos 2 e1 +
a
2sin 2 e2
per cui
UOAg = !1
2mga sin2 .
Peso di ABCDIl potenziale e in questo caso
UABCDg = !mg e2 · (G ! O)
dove, indicato con M il punto medio del lato AB, il centro geometrico e di massa G delquadrato omogeneo si individua per mezzo del vettore posizione:
G ! O = G ! M + M ! B + B ! O =
=$a
2sin 2 e1 +
a
2cos 2 e2
%+$!a
2cos 2 e1 +
a
2sin 2 e2
%+ 2a cos 2 e1 =
= a$1
2sin 2 ! 1
2cos 2 + 2 cos 2
%e1 +
a
2
$cos 2 + sin2
%e2 ,
notando che il triangolo OBA e isoscele e che gli angoli OBA, HGM sono uguali (vedifigura).
Stefano Siboni 2595

Universita degli studi di Trento Esercizi di Meccanica razionale
Ne deriva cheUABCD
g = !12mga(cos 2 + sin2) .
Interazione elastica fra O e BAlla molla ideale di costante elastica mg/2a che congiunge O e B e associato il potenzialeelastico
Uel = !12
mg
2a|B ! O|2 = !mg
4a|2a cos 2 e1|2 = !mgacos22 .
Sistema S di forze agenti sulla piastra ABCDLa piastra rigida si nuove di moto piano e la sua rotazione puo essere descritta dall’angolo
!BGM = !2 ,
dove il segno negativo e dovuto al fatto che gli angoli BOA e BGM sono uguali ma orientatiin senso opposto, per cui BGM non si conforma alla regola della mano destra rispetto alversore e3 (uscente dal piano del foglio, visto che la terna Oxyz e, al solito, ortogonaledestra). Dalle espressioni del risultante e del momento risultante di S:
*R =14mg e1 + mg sin 2 e2
*MB = mga cos 2 e1 + (2 e3
si ha allora la componente generalizzata del sistema di forze:
QS& = *R · .B
.2+ *MB · e3
.
.2(!2) = *R · .
.2(2a cos 2 e1) ! *MB · e3 =
= !2a sin2 *R · e1 ! (2 = !2a sin 2mg
4! (2 = !1
2mga sin 2 ! (2 .
La componente calcolata consta di un termine posizionale conservativo:
!12mga sin2 =
.
.2
$12mga cos 2
%=
.US
.2
e di uno completamente dissipativo:
D& = !(2
per via del segno non positivo della potenza:
" = D&2 = !(22 ' 0
che si annulla unicamente a velocita generalizzata nulla:
" = 0 1+ 2 = 0 .
Stefano Siboni 2596

Universita degli studi di Trento Esercizi di Meccanica razionale
Componente generalizzata delle forze attiveLa componente generalizzata delle forze attive si ricava sommando i contributi di tutte lesollecitazioni parziali ed e quindi data da
Q& =.
.2(UOA
g + UABCDg + Uel + US) + D& =
=.
.2
-!1
2mga sin 2 ! 1
2mga(cos 2 + sin 2) !mgacos22 +
12mga cos 2
.! (2 =
=.
.2(!mga sin 2 !mgacos22) ! (2 = mga(! cos 2 + 2 cos 2 sin 2) ! (2 .
Si osservi che il potenziale del sistema vale
U(2) = mga(! sin2 ! cos22) .
(b) EquilibriLe sollecitazioni dissipative sono irrilevanti nella determinazione degli equilibri, i quali siidentificano percio con i punti stazionari del potenziale U . Si ha allora l’equazione di equi-librio:
U "(2) = mga(! cos 2 + 2 cos 2 sin 2) = 0
che assume l’ovvia forma equivalente
cos 2$!1
2+ sin 2
%= 0
dalla quale si deducono le soluzioni:
2 = "/2 2 = !"/2
per cos 2 = 0, e le ulteriori radici:
2 = "/6 2 = 5"/6
per sin 2 = 1/2.
(c) Stabilita degli equilibriIl sistema e soggetto sia a sollecitazioni posizionali conservative che a sollecitazioni comple-tamente dissipative. Tutti gli equilibri risultano inoltre isolati, essendo in numero finito. Nederiva che le proprieta di stabilita degli equilibri possono essere analizzate ricorrendo allaforma forte del teorema di Lagrange-Dirichlet, basata sui criteri di Barbasin-Krasovskii. Sitratta di calcolare il segno della derivata seconda del potenziale:
U ""(2) = mga(sin2 ! 2sin22 + 2cos22)
in ciascuna configurazione di equilibrio.
Stefano Siboni 2597

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione 4 = "/2In questo caso la derivata seconda assume segno negativo
U ""("/2) = mga(1 ! 2) = !mga < 0
e la configurazione costituisce dunque un massimo relativo proprio del potenziale, del qualei criteri di Barbasin-Krasovskii assicurano la stabilita asintotica.
Configurazione 4 = !"/2Anche questa configurazione e asintoticamente stabile per Barbasin-Krasovskii, in quantomassimo relativo proprio del potenziale. La circostanza e provata dal segno negativo delladerivata seconda del potenziale:
U ""(!"/2) = mga(!1! 2) = !3mga < 0 .
Configurazione 4 = "/6Nella fattispecie la derivata seconda del potenziale assume segno positivo:
U ""("/6) = mga$1
2! 2 · 1
4+ 2 · 3
4
%=
32mga > 0
ed esclude quindi che la configurazione costituisca un massimo relativo proprio del potenziale.Per i criteri di Barbasin-Krasovskii cio basta a concludere che l’equilibrio e instabile.
Configurazione 4 = 5"/6Per questo equilibrio la derivata seconda del potenziale ha lo stesso valore calcolato nellaconfigurazione precedente:
U ""(5"/6) = mga
-12! 2 · 1
4+ 2 ·
$$32
%2.
=32mga > 0
escludendo cosı il ricorrere di un massimo relativo proprio del potenziale. L’instabilitadell’equilibrio segue dal teorema di Barbasin-Krasovskii.
Esercizio 501. Piccole oscillazioni in presenza di forze viscoseUn sistema scleronomo a vincoli ideali, descritto dalle coordinate + " R e 2 " (!"/2,"/2),ha lagrangiana
L =mL2
2(+2 + 22 + 2 sin2 + 2) + mgL(cos 2 ! +) ! kL2
2
$12
+ + ! 12
cos 2%2
ed e soggetto a sollecitazioni non posizionali di componenti
Q! = !(mL2+ Q& = !(mL22 ,
dove m, L, k sono rispettivamente una massa, una lunghezza e una costante elastica carat-teristiche del sistema, mentre g indica l’accelerazione di gravita e ( una costante positiva.Determinare, intorno all’equilibrio stabile (+,2) = (!mg/kL, 0):
Stefano Siboni 2598

Universita degli studi di Trento Esercizi di Meccanica razionale
(a) le equazioni linearizzate del moto;(b) la soluzione generale di tali equazioni, nell’ipotesi che sia ( <
52g/L e ( < 2
5k/m;
(c) le frequenze e i modi normali delle piccole oscillazioni per ( = 0.
Soluzione(a) Equazioni linearizzate del motoIl sistema e descritto dalla lagrangiana
L =12mL2(+2 + 22 + 2 sin2 +2) + mgL(cos2 ! +) ! 1
2kL2
$12
+ + ! 12
cos 2%2
ed e soggetto alle sollecitazioni non posizionali Q! = !(mL2+ e Q& = !(mL22. Trattandosidi sistema scleronomo, la parte quadratica in (+, 2) della lagrangiana rappresenta l’energiacinetica del sistema:
T =12mL2(+2 + 22 + 2 sin 2 +2) =
12(+ 2)A(2)
++2
,
conA(2) = mL2
+1 sin 2
sin2 1
,
definita positiva per ogni 2 " (!"/2,"/2). Il termine residuo di L e il potenziale di sistema
U(+,2) = mgL(cos 2 ! +) ! 12kL2
$12
+ + ! 12
cos 2%2
con le derivate parziali prime:
.U
.+(+,2) = !mgL! kL2
$12
+ + ! 12
cos 2%
.U
.2(+,2) = !mgL sin2 ! kL2
$12
+ + ! 12
cos 2%1
2sin 2
(501.1)
e le derivate seconde:
.2U
.+2(+,2) = !kL2 .2U
.2.+(+,2) = !1
2kL2 sin 2
.2U
.22(+,2) = !mgL cos 2 ! kL2 1
2sin2
12
sin2 ! kL2$1
2+ + ! 1
2cos 2
%12
cos 2 .
(501.2)
Si osservi che dalle (501.1), causa la natura dissipativa di (Q!, Q&) = (!(mL2+,!(mL22),seguono le condizioni di equilibrio
'()
(*
!mgL! kL2$1
2+ + ! 1
2cos 2
%= 0
!mgL sin2 ! kL2$1
2+ + ! 1
2cos 2
%12
sin 2 = 0 ,
Stefano Siboni 2599

Universita degli studi di Trento Esercizi di Meccanica razionale
che sostituendo la seconda equazione nella prima si riducono a'()
(*
kL2$1
2+ + ! 1
2cos 2
%= !mgL
!mgL sin2 + mgL12
sin2 = 0
ovvero a ')
*
12! 1
2cos 2 + + = !mg
kLsin2 = 0
e consentono di riconoscere (+,2) = (!mg/kL, 0) come un equilibrio del sistema. La matricehessiana di U nello stesso equilibrio diventa inoltre
HU (!mg/kL, 0) =+!kL2 0
0 !mgL/2
,
e risulta chiaramente definita negativa, implicando cosı la stabilita dell’equilibrio per il teo-rema di Lagrange-Dirichlet. Da notare come il carattere in realta completamente dissipativodella sollecitazione (Q!, Q&), evidente dalle relazioni seguenti:
" = Q! + + Q&2 = !(mL2(+2 + 22) ' 0 " = 0 1+ (+, 2) = (0, 0) ,
comporti in e"etti la stabilita asintotica dell’equilibrio in base ai criteri di Barbasin-Krasov-skii. Introdotti gli spostamenti (piccoli) delle variabili lagrangiane dai rispettivi valori diequilibrio:
3+ = + +mg
kL32 = 2 ! 0
e notato che le sollecitazioni dissipative (Q! , Q&) sono gia lineari in (+, 2), le equazionilinearizzate del moto intorno a (+,2) = (!mg/kL, 0) si scrivono:
A(0)+
3+32
,! HU (!mg/kL, 0)
+3+32
,=+
Q!
Q&
,
ossiamL2
+1 00 1
,+3+32
,!+!kL2 0
0 !mgL/2
,+3+32
,=+!(mL23+!(mL2 ˙32
,
e diventano percio ')
*mL23+ + kL23+ = !(mL23+
mL232 +12mgL32 = !(mL2 ˙32 .
(501.3)
Si perviene in tal modo al sistema di equazioni disaccoppiate:'()
(*
3+ + (3+ +k
m3+ = 0
32 + ( ˙32 +g
2L32 = 0 .
(501.4)
Stefano Siboni 2600

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Soluzione generale delle equazioni linearizzateLe equazioni (501.4) costituiscono un sistema di due equazioni disaccoppiate, la prima nellavariabile dipendente 3+ e la seconda in 32. Entrambe descrivono oscillatori armonici unidi-mensionali con smorzamento viscoso.Alla prima equazione si associa l’equazione caratteristica
,2 + (, +k
m= 0
le cui soluzioni sono complesse coniugate
,± =12
$!( ±
"(2 ! 4k
m
%= !(
2± i
12
"4k
m! (2
per via della condizione ( < 25
k/m. La soluzione generale assume cosı la forma
3+(t) = e!(
2 t-a1 cos
$12
"4k
m! (2 t
%+ a2 sin
$12
"4k
m! (2 t
%.(501.5)
con a1, a2 costanti reali (abbastanza piccole) arbitrarie e — dato il segno positivo di ( —descrive moti oscillatori smorzati di pulsazione
#,! =12
"4k
m! (2 . (501.6)
Per la seconda equazione in (501.4) risulta invece
,2 + (, +g
2L= 0
con soluzioni ancora complesse coniugate e a parte reale negativa:
,± =12
$!( ±
"(2 ! 2g
L
%= !(
2± i
12
"2g
L! (2
a causa dell’ipotesi ( <5
2g/L. Ne deriva la soluzione generale
32(t) = e!(
2 t-b1 cos
$12
"2g
L! (2 t
%+ b2 sin
$12
"2g
L! (2 t
%.(501.7)
nella quale b1 e b2 sono costanti reali arbitrarie (abbastanza piccole). Tutti i moti in 32(t)sono oscillatori smorzati con pulsazione
#,& =12
"2g
L! (2 . (501.8)
Stefano Siboni 2601

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Frequenze e modi normali di oscillazione per ( = 0Per ( = 0 il sistema diventa posizionale conservativo e l’equazione caratteristica per lepulsazioni normali assume la forma standard
detJ#2A(0) + HU (!mg/kL, 0)
K= 0
ossia
det
FmL2#2 ! kL2 0
0 mL2#2 ! 12mgL
G= 0
e quindi
mL2$#2 ! k
m
%mL2
$#2 ! g
2L
%= 0 .
Le pulsazioni normali sono pertanto
#1 =5
k/m #2 =5
g/2L
e coincidono, come e ovvio, con le #,! e #,& gia calcolate a patto di porre ( = 0. Lecorrispondenti frequenze normali risultano cosı:
f1 =#1
2"=
12"
"k
mf2 =
#2
2"=
12"
"g
2L.
I modi normali sono ovvi. Per #1 =5
k/m l’equazione delle ampiezze diventa:
7#2
1A(0) + HU (!mg/kL, 0)8+'1
'2
,=
/
10 0
0 mL2 k
m! 1
2mgL
2
4+
'1
'2
,=+
00
,
e porge la soluzione non banale ('1,'2) = (', 0) %' " R \ {0}, mentre per #2 =5
g/2L siha
7#2
2A(0) + HU (!mg/kL, 0)8+(1
(2
,=
/
1mL2 g
2L! kL2 0
0 0
2
4+
(1
(2
,=+
00
,
e quindi ((1,(2) = (0,() %( " R \ {0}. Ne derivano per #1 =5
k/m il modo normale
+3+(t)32(t)
,= '
+10
,cos
$" k
mt + /-
%% t " R (501.9)
con ' > 0 e /- " R assegnati a piacere, e per #2 =5
g/2L il modo normale+
3+(t)32(t)
,= (
+01
,cos
$" g
2Lt + /.
%% t " R (501.10)
Stefano Siboni 2602

Universita degli studi di Trento Esercizi di Meccanica razionale
con ( > 0 e /. " R costanti arbitrarie. Le espressioni (501.9) e (501.10) indicano chenel primo modo normale 3+ oscilla con pulsazione
5k/m e 32 si mantiene fisso a zero,
mentre nel secondo modo normale 3+ e certamente nullo e 32 oscilla con pulsazione5
g/2L.Le componenti non banali delle (501.9) e (501.10) coincidono pertanto, come era lecitoaspettarsi, con le soluzioni generali (501.5) e (501.7) nel caso sia ( = 0. Da notare che permg/kL = 2 risulta #1 = #2 e la matrice
#21A(0) + HU (!mg/kL, 0)
diventa identicamente nulla. In tal caso i due modi normali di oscillazione possono definirsifissando una qualsiasi coppia di vettori di ampiezze fra loro linearmente indipendenti.
Esercizio 502. Confronto fra binomio di Lagrange e calcolo diretto di Mh
Nel piano Oxy di una terna inerziale Oxyz 5 Oe1e2e3, una piastra quadrata pesante ABCDdi lato a ha i vertici A e B rispettivamente vincolati a scorrere lungo l’asse verticale Oye quello orizzontale Ox. Una molla ideale di costante elastica k congiunge B con O. Ladensita della piastra e data da
&(P ) =µ
a4|P !A|2 %P " ABCD .
Assunti i vincoli ideali e l’angolo 2 " R in figura come parametro lagrangiano, determinare:
(a) le equazioni di Lagrange del sistema(b) le equazioni del moto del sistema nella forma M& = Q&, calcolando direttamente M&
secondo la sua definizione;(c) l’equazione che individua gli equilibri del sistema.
Stefano Siboni 2603

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Equazioni di LagrangeMassa e baricentro della piastraSi introduce la terna A+0z 5 Ae! e' e3 solidale alla piastra in modo che l’asse A+ sia paralleloe concorde al vettore B ! A, e l’asse A0 parallelo e concorde a D ! A, mentre ovviamenteAz e parallelo ad Oz.
La densita areale della piastra in un generico punto P individuato da P ! A = + e! + 0 e'
vale allora&(+, 0) =
µ
a4|P ! A|2 =
µ
a4|+ e! + 0 e'|2 =
µ
a4(+2 + 02) % (+, 0) " [0, a]2 .
La massa della piastra risulta cosı:
m =a6
0
d+
a6
0
d0µ
a4(+2 + 02) =
µ
a4
a6
0
d+
-+20 +
03
3
.a
'=0
=
=µ
a4
a6
0
$a+2 +
a3
3
%d+ =
µ
a4
$a
a3
3+ a
a3
3
%=
23µ .
Poiche la retta 0 = + costituisce un ovvio asse di simmetria:
&(+, 0) =µ
a4(+2 + 02) =
µ
a4(02 + +2) = &(0, +) % (+, 0) " [0, a]2 ,
il vettore posizione del baricentro G rispetto ad A deve essere del tipo:G ! A = +G e! + +G e'
con
+G =1m
6
[0,a]2
&(+, 0) + d+d0 =32µ
a6
0
d+
a6
0
d0µ
a4(+2 + 02)+ =
32µ
µ
a4
a6
0
d+
a6
0
d0 (+3 + +02) =
=3
2a4
a6
0
d+
-+30 + +
03
3
.a
'=0
=3
2a4
a6
0
$+3a + +
a3
3
%d+ =
32a4
$a4
4a +
a2
2a3
3
%=
58a
Stefano Siboni 2604
Universita degli studi di Trento Esercizi di Meccanica razionale
per cui
G ! A =58a e! +
58a e' . (502.1)
Per individuare la posizione del baricentro rispetto alla terna assoluta Oxyz e necessariodeterminare la trasformazione fra le coordinate dello stesso punto relative alla terna A+0z equelle relative alla terna Oxyz. Per un generico punto P individuato da P !A = + e! + 0 e'
si ha infatti:P ! O = A !O + P ! A
in modo che l’ascissa di P in Oxyz diventa
x = (P !O) · e1 = (A !O) · e1 + (+ e! + 0 e') · e1 == e1 · e! + + e1 · e' 0 = sin2+ + cos 20
ed analogamente la relativa ordinata in Oxyz assume la forma
y = (P ! O) · e2 = (A ! O) · e2 + (+ e! + 0 e') · e2 == a cos 2 + e2 · e! + + e2 · e' 0 = a cos 2 ! cos 2+ + sin20
porgendo cosı la trasformazione di coordinate:D
x = sin2+ + cos 20y = a cos 2 ! cos 2+ + sin 20 .
(502.2)
Posizione del baricentro rispetto alla terna assolutaIn base all’equazione (502.1) il vettore posizione del baricentro rispetto alla terna A+0z hacoordinate (+, 0) = (+G, +G) = (5a/8, 5a/8). Applicando la trasformazione (502.2) si ricavanole coordinate dello stesso punto rispetto a Oxyz:
'(()
((*
xG = sin258a + cos 2
58a =
58a sin 2 +
58a cos 2
yG = a cos 2 ! cos 258a + sin2
58a =
58a sin 2 +
38a cos 2
Stefano Siboni 2605

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui
G ! O =$5
8a sin 2 +
58a cos 2
%e1 +
$58a sin 2 +
38a cos 2
%e2 .
Momento d’inerzia della piastra rispetto all’asse GzConviene ricorrere al teorema di Huygens-Steiner e scrivere
IAz = IGz + m|G !A|2 = IGz +23µ$25
64a2 +
2564
a2%
per poi calcolare direttamente IAz:
IAz =a6
0
d+
a6
0
d0 &(+, 0) (+2 + 02) =a6
0
d+
a6
0
d0µ
a4(+2 + 02)2 =
=µ
a4
a6
0
d+
a6
0
d0 (+4 + 2+202 + 04) =µ
a4
a6
0
d+
-+40 + 2+2 03
3+
05
5
.a
'=0
=
=µ
a4
a6
0
$a+4 +
23a3+2 +
a5
5
%d+ =
µ
a4
$a
a5
5+
23a3 a3
3+
a5
5a%
=2845
µa2
ed ottenere infine
IGz =2845
µa2 ! 23µ
2532
a2 =2845
µa2 ! 2548
µa2 =73720
µa2 .
Energia cinetica della piastraL’energia cinetica della piastra si calcola mediante la formula di Konig:
T =m
2G2 +
12IGz|*#|2 ,
dovem =
23µ IGz =
73720
µa2 *# = 2 e3
ed inoltreG ! O =
58a(sin 2 + cos 2)e1 + a
$58
sin2 +38
cos 2%e2 ,
per cui
G =-58a(cos 2 ! sin 2)e1 + a
$58
cos 2 ! 38
sin2%e2
.2
ed infine
G2 =164725(cos 2 ! sin 2)2 + (5 cos 2 ! 3 sin 2)2
8a222 =
=164725cos22 + 25 sin22 ! 50 sin 2 cos 2 + 25cos22 + 9sin22 ! 30 sin2 cos 2
8a222 =
=164
(25 ! 80 sin 2 cos 2 + 16cos22 + 9)a222 =164
(34 ! 80 sin2 cos 2 + 16cos22)a222.
Stefano Siboni 2606

Universita degli studi di Trento Esercizi di Meccanica razionale
Ne deriva che
T =12
2µ
3164
(34 ! 80 sin 2 cos 2 + 16cos22)a222 +12
73720
µa222 =
=12µa222
$ 343 · 32
! 803 · 32
sin 2 cos 2 +16
3 · 32cos22 +
73720
%=
=12µa222
$1748
+73720
! 56
sin 2 cos 2 +16cos22
%=
=12µa222
$4190
! 56
sin2 cos 2 +16cos22
%.
(502.3)
Potenziale gravitazionaleIl sistema delle forze peso agenti sulla piastra e descritto dal potenziale gravitazionale
Ug = !mg e2 · (G!O) = !23µga
$58
sin2+38
cos 2%
= ! 112
µga(5 sin 2+3 cos 2). (502.4)
Potenziale elasticoAll’interazione elastica fra l’origine O e il vertice B e invece associato il potenziale elastico
Uel = !k
2|B ! O|2 = !k
2|a sin 2 e1|2 = !1
2ka2sin22 . (502.5)
Lagrangiana del sistemaLa lagrangiana del sistema e data dalla somma dell’energia cinetica (502.3) e dei potenziali(502.4) e (502.5), risultando pertanto L = T + Ug + Uel, ossia:
L =12µa222
$4190
! 56
sin 2 cos 2 +16cos22
%! 1
12µga(5 sin 2 + 3 cos 2) ! 1
2ka2sin22 .
Equazioni di LagrangeLe equazioni di Lagrange del sistema si riducono ovviamente all’unica equazione pura
d
dt
$.L
.2
%! .L
.2= 0 ,
nella quale e immediato verificare che
.L
.2= µa22
$4190
! 56
sin2 cos 2 +16cos22
%
d
dt
$.L
.2
%= µa22
$4190
! 56
sin2 cos 2 +16cos22
%+
+ µa222$!5
6cos22 +
56sin22 ! 1
3cos 2 sin 2
%
mentre
.L
.2=
12µga22
$!5
6cos22+
56sin22! 1
3sin2 cos 2
%! 1
12µga(5 cos 2!3 sin 2)!ka2 sin2 cos 2
Stefano Siboni 2607

Universita degli studi di Trento Esercizi di Meccanica razionale
in modo che l’equazione richiesta diventa
µa22$41
90! 5
6sin 2 cos 2 +
16cos22
%+
12µa222
$!5
6cos22 +
56sin22 ! 1
3cos 2 sin 2
%=
= ! 112
µga(5 cos 2 ! 3 sin 2) ! ka2 sin2 cos 2 .
(502.6)(b) Equazione del moto nella forma M& = Q&
L’espressione da calcolare e
M& =6
ABCD
&(P ) P · .P
.2dA (502.7)
in cui la doppia variabile d’integrazione (+, 0) " [0, a]2 prende il posto dell’usuale indice idi somma per i sistemi discreti e l’elemento infinitesimo di massa &(P )dA si sostituisce allamassa mi del punto Pi:
M& =N9
i=1
miPi ·.Pi
.2.
Per ogni P " ABCD si ha
P ! A = + e! + 0 e' , (+, 0) " [0, a]2 ,
per cui usando la trasformazione (502.2) si ottiene
P !O = A ! O + P ! A = (+ sin2 + 0 cos 2)e1 + [(a ! +) cos 2 + 0 sin2] e2 .
Ne deriva che.P
.2= (+ cos 2 ! 0 sin2) e1 + [(+ ! a) sin 2 + 0 cos 2] e2 ,
mentre lungo un qualsiasi moto possibile, individuato dalla funzione C2 2 = 2(t), si ha:
P = (+ cos 2 ! 0 sin2)2 e1 + [(+ ! a) sin 2 + 0 cos 2]2 e2
e di conseguenza:
P = (+ cos 2 ! 0 sin2)2 e1 + [(+ ! a) sin 2 + 0 cos 2]2 e2+
+ (!+ sin2 ! 0 cos 2)22e1 + [(+ ! a) cos 2 ! 0 sin2]22 e2 .
Vale dunque
P · .P
.2= (+ cos 2 ! 0 sin 2)22 + (+ cos 2 ! 0 sin 2)(!+ sin2 ! 0 cos 2)22+
+ [(+ ! a) sin 2 + 0 cos 2]22 + [(+ ! a) sin 2 + 0 cos 2][(+ ! a) cos 2 ! 0 sin 2]22 =
=7+2cos22 + 02sin22 ! 2+0 sin 2 cos 2+
+ (+ ! a)2sin22 + 02cos22 + 2(+ ! a)0 sin 2 cos 282+
+7!+2 sin 2 cos 2 ! +0 cos22 + +0 sin22 + 02 sin2 cos 2+
+ (+ ! a)2 sin2 cos 2 ! (+ ! a)0 sin22 + 0(+ ! a) cos22 ! 02 sin 2 cos 2822
Stefano Siboni 2608

Universita degli studi di Trento Esercizi di Meccanica razionale
ossiaP · .P
.2= [+2 + (a2 ! 2a+)sin22 + 02 ! 2a0 sin 2 cos 2] 2+
+ [(a2 ! 2a+) sin 2 cos 2 ! a0 cos22 + a0 sin22]22.
Il calcolo della funzione (502.7) richiede dunque la determinazione degli integrali:
N1 =6
[0,a]2
(+2 + 02)&(+, 0)d+d0
N2 =6
[0,a]2
(a2 ! 2a+)&(+, 0)d+d0
N3 =6
[0,a]2
0 &(+, 0)d+d0
per i quali si ha
N1 =a6
0
d+
a6
0
d0µ
a4(+2 + 02)2 = IAz =
2845
µa2
N2 = a2
a6
0
d+
a6
0
d0 &(+, 0) ! 2a
a6
0
d+
a6
0
d0 + &(+, 0) =
= a2m ! 2am +G =23µa2 ! 2a
23µ
58a = !1
6µa2
N3 =a6
0
d+
a6
0
d0 0 &(+, 0) = m 0G = m +G =23µ
58a =
512
µa .
(502.8)
Risulta cosı:
M& = (N1 + N2 sin22 ! 2aN3 sin 2 cos 2)2 + (N2 sin2 cos 2 ! aN3cos22 + aN3sin22)22
e sostituendo le espressioni (502.8) si ricava:
M& =$28
45µa2 ! 1
6µa2sin22 ! 2a
512
µa sin 2 cos 2%2+
+$!1
6µa2 sin2 cos 2 ! a
512
µa cos22 + a512
µa sin22%
=
=$28
45! 1
6+
16cos22 ! 5
6sin 2 cos 2
%µa22+
+12µa2
$!1
3sin2 cos 2 ! 5
6cos22 +
56sin22
%22 =
=$41
90! 5
6sin 2 cos 2 +
16cos22
%2+
+12µa222
$!5
6cos22 +
56sin22 ! 1
3sin 2 cos 2
%.
Stefano Siboni 2609

Universita degli studi di Trento Esercizi di Meccanica razionale
Per Q& si ha invece l’ovvia espressione
Q& =.U
.2=
.
.2
-! 1
12µga(5 sin 2 + 3 cos 2) ! ka2
2sin22
.=
= ! 112
µga(5 cos 2 ! 3 sin 2) ! ka2 sin2 cos 2
dalla quale si deduce che l’equazione M& = Q& coincide con l’equazione di Lagrange (502.6).Si osservi che il calcolo del binomio di Lagrange
d
dt
$.T
.2
%! .T
.2
risulta decisamente piu semplice e diretto che non quello di M&. La forma lagrangiana apparecosı particolarmente e"ciente e coincisa per la determinazione esplicita delle equazioni puredel moto.
(c) Equazione di equilibrioIl sistema e scleronomo, posizionale e conservativo, a vincoli bilaterali ideali. Tutti i suoiequilibri sono dunque ordinari e identificabili con i punti critici del potenziale U = Ug + Uel
del sistema. Si deve cosı risolvere l’equazione trigonometrica
! 112
µga(5 cos 2 ! 3 sin 2) ! ka2 sin2 cos 2 = 0
ossia la5 cos 2 ! 3 sin 2 + 12
ka
µgsin2 cos 2 = 0
che puo anche porsi nella forma equivalente
ka
µgsin2 cos 2 =
14
sin2 ! 512
cos 2
ed applicando l’identita di duplicazione per la funzione seno diventa
ka
µgsin(22) =
12
sin 2 ! 56
cos 2 .
Il secondo membro dell’ultima equazione puo scriversi come un’unica funzione sinusoidalemoltiplicando e dividendo per
"$12
%2+$!5
6
%2="
14
+2536
="
9 + 2536
=$
346
in modo da pervenire all’equazione
ka
µgsin(22) =
$346
$ 3$34
sin 2 ! 5$34
cos 2%
Stefano Siboni 2610
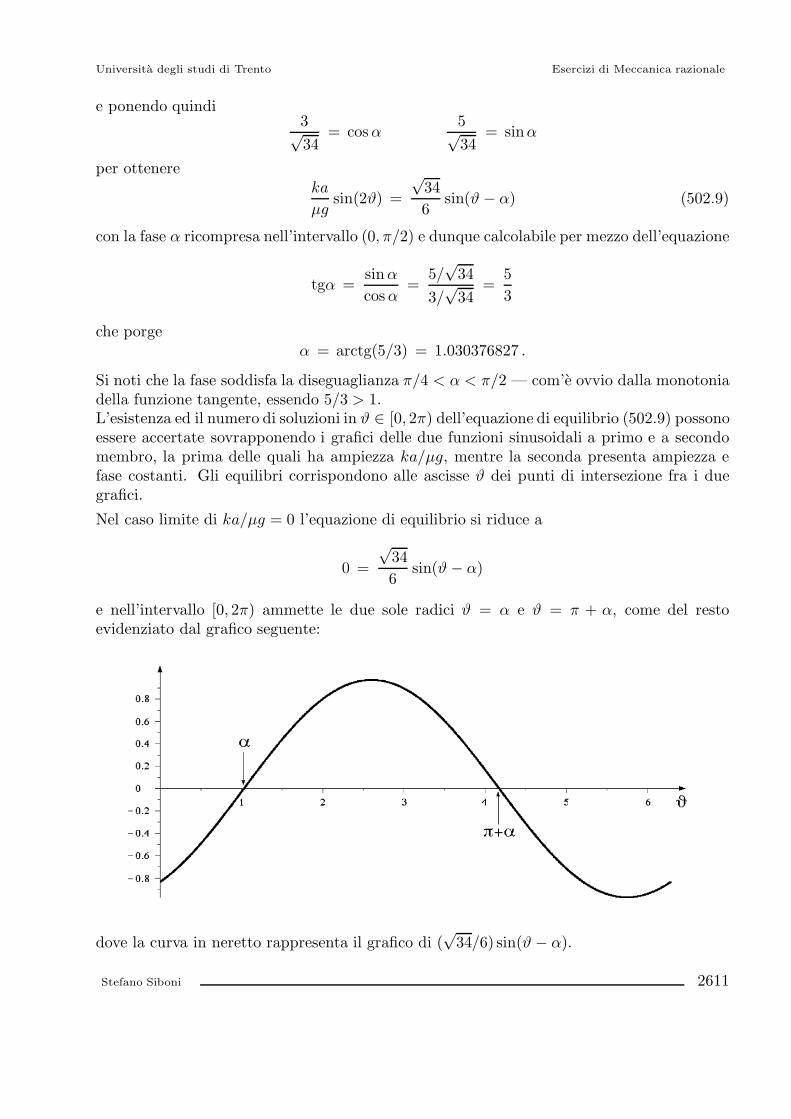
Universita degli studi di Trento Esercizi di Meccanica razionale
e ponendo quindi3$34
= cos '5$34
= sin'
per ottenereka
µgsin(22) =
$346
sin(2 ! ') (502.9)
con la fase ' ricompresa nell’intervallo (0,"/2) e dunque calcolabile per mezzo dell’equazione
tg' =sin '
cos '=
5/$
343/
$34
=53
che porge' = arctg(5/3) = 1.030376827 .
Si noti che la fase soddisfa la diseguaglianza "/4 < ' < "/2 — com’e ovvio dalla monotoniadella funzione tangente, essendo 5/3 > 1.L’esistenza ed il numero di soluzioni in 2 " [0, 2") dell’equazione di equilibrio (502.9) possonoessere accertate sovrapponendo i grafici delle due funzioni sinusoidali a primo e a secondomembro, la prima delle quali ha ampiezza ka/µg, mentre la seconda presenta ampiezza efase costanti. Gli equilibri corrispondono alle ascisse 2 dei punti di intersezione fra i duegrafici.Nel caso limite di ka/µg = 0 l’equazione di equilibrio si riduce a
0 =$
346
sin(2 ! ')
e nell’intervallo [0, 2") ammette le due sole radici 2 = ' e 2 = " + ', come del restoevidenziato dal grafico seguente:
dove la curva in neretto rappresenta il grafico di ($
34/6) sin(2 ! ').
Stefano Siboni 2611
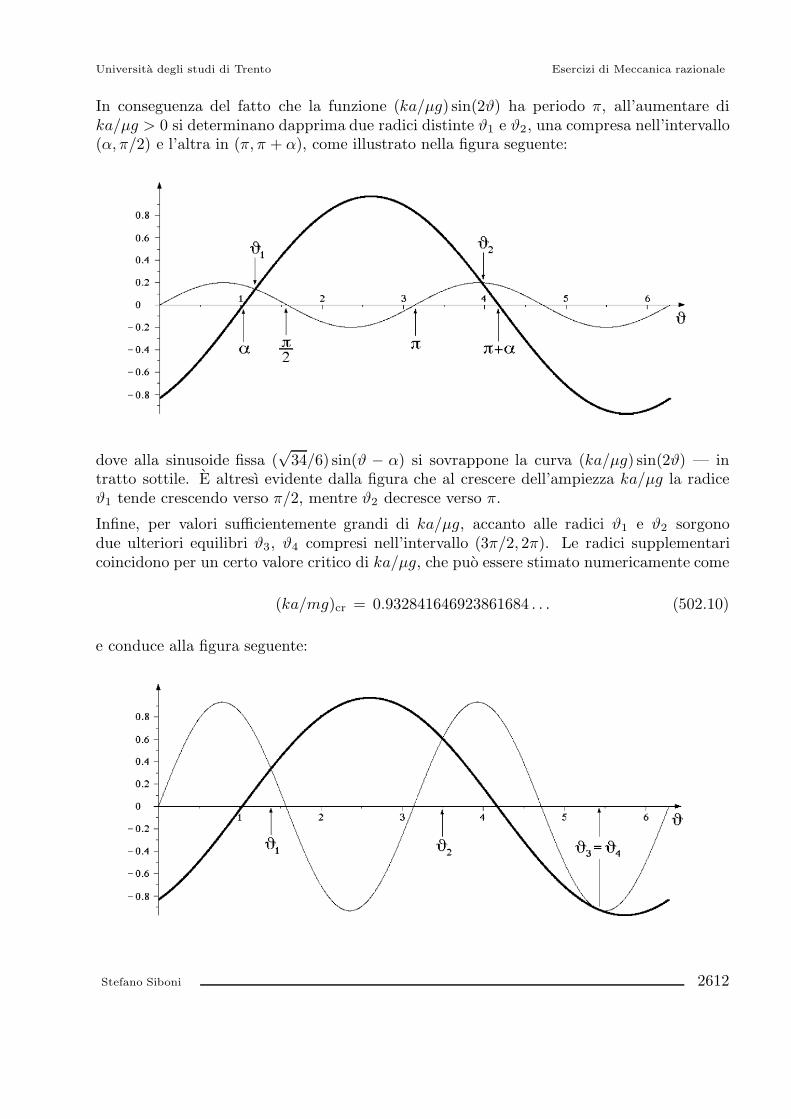
Universita degli studi di Trento Esercizi di Meccanica razionale
In conseguenza del fatto che la funzione (ka/µg) sin(22) ha periodo ", all’aumentare dika/µg > 0 si determinano dapprima due radici distinte 21 e 22, una compresa nell’intervallo(',"/2) e l’altra in ("," + '), come illustrato nella figura seguente:
dove alla sinusoide fissa ($
34/6) sin(2 ! ') si sovrappone la curva (ka/µg) sin(22) — intratto sottile. E altresı evidente dalla figura che al crescere dell’ampiezza ka/µg la radice21 tende crescendo verso "/2, mentre 22 decresce verso ".
Infine, per valori su!cientemente grandi di ka/µg, accanto alle radici 21 e 22 sorgonodue ulteriori equilibri 23, 24 compresi nell’intervallo (3"/2, 2"). Le radici supplementaricoincidono per un certo valore critico di ka/µg, che puo essere stimato numericamente come
(ka/mg)cr = 0.932841646923861684 . . . (502.10)
e conduce alla figura seguente:
Stefano Siboni 2612
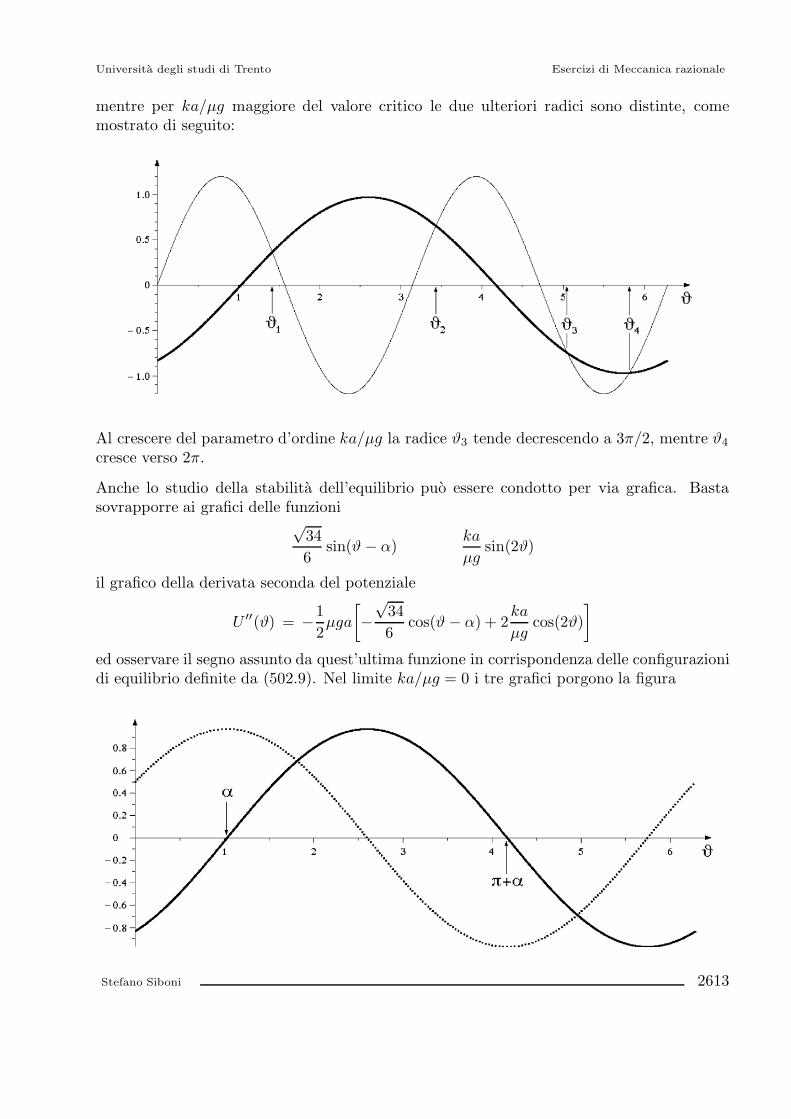
Universita degli studi di Trento Esercizi di Meccanica razionale
mentre per ka/µg maggiore del valore critico le due ulteriori radici sono distinte, comemostrato di seguito:
Al crescere del parametro d’ordine ka/µg la radice 23 tende decrescendo a 3"/2, mentre 24
cresce verso 2".
Anche lo studio della stabilita dell’equilibrio puo essere condotto per via grafica. Bastasovrapporre ai grafici delle funzioni
$346
sin(2 ! ')ka
µgsin(22)
il grafico della derivata seconda del potenziale
U ""(2) = !12µga
-!$
346
cos(2 ! ') + 2ka
µgcos(22)
.
ed osservare il segno assunto da quest’ultima funzione in corrispondenza delle configurazionidi equilibrio definite da (502.9). Nel limite ka/µg = 0 i tre grafici porgono la figura
Stefano Siboni 2613
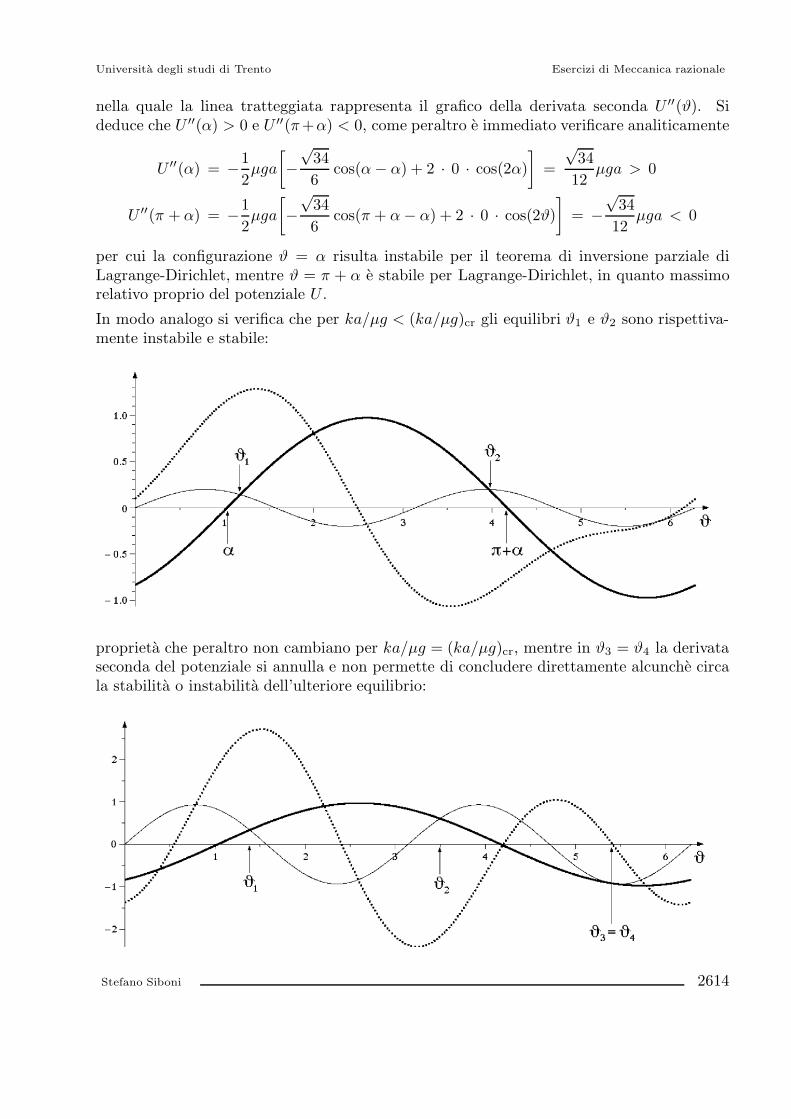
Universita degli studi di Trento Esercizi di Meccanica razionale
nella quale la linea tratteggiata rappresenta il grafico della derivata seconda U ""(2). Sideduce che U ""(') > 0 e U ""("+') < 0, come peraltro e immediato verificare analiticamente
U ""(') = !12µga
-!$
346
cos(' ! ') + 2 · 0 · cos(2').
=$
3412
µga > 0
U ""(" + ') = !12µga
-!$
346
cos(" + ' ! ') + 2 · 0 · cos(22).
= !$
3412
µga < 0
per cui la configurazione 2 = ' risulta instabile per il teorema di inversione parziale diLagrange-Dirichlet, mentre 2 = " + ' e stabile per Lagrange-Dirichlet, in quanto massimorelativo proprio del potenziale U .In modo analogo si verifica che per ka/µg < (ka/µg)cr gli equilibri 21 e 22 sono rispettiva-mente instabile e stabile:
proprieta che peraltro non cambiano per ka/µg = (ka/µg)cr, mentre in 23 = 24 la derivataseconda del potenziale si annulla e non permette di concludere direttamente alcunche circala stabilita o instabilita dell’ulteriore equilibrio:
Stefano Siboni 2614
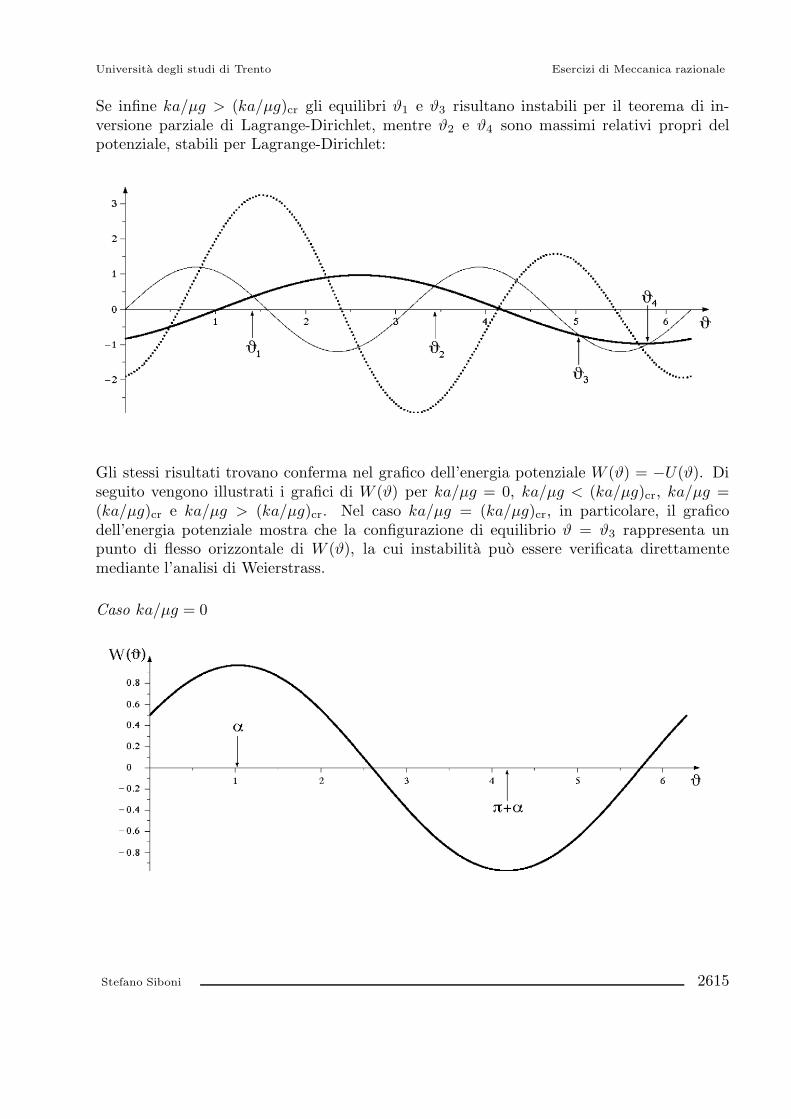
Universita degli studi di Trento Esercizi di Meccanica razionale
Se infine ka/µg > (ka/µg)cr gli equilibri 21 e 23 risultano instabili per il teorema di in-versione parziale di Lagrange-Dirichlet, mentre 22 e 24 sono massimi relativi propri delpotenziale, stabili per Lagrange-Dirichlet:
Gli stessi risultati trovano conferma nel grafico dell’energia potenziale W (2) = !U(2). Diseguito vengono illustrati i grafici di W (2) per ka/µg = 0, ka/µg < (ka/µg)cr, ka/µg =(ka/µg)cr e ka/µg > (ka/µg)cr. Nel caso ka/µg = (ka/µg)cr, in particolare, il graficodell’energia potenziale mostra che la configurazione di equilibrio 2 = 23 rappresenta unpunto di flesso orizzontale di W (2), la cui instabilita puo essere verificata direttamentemediante l’analisi di Weierstrass.
Caso ka/µg = 0
Stefano Siboni 2615
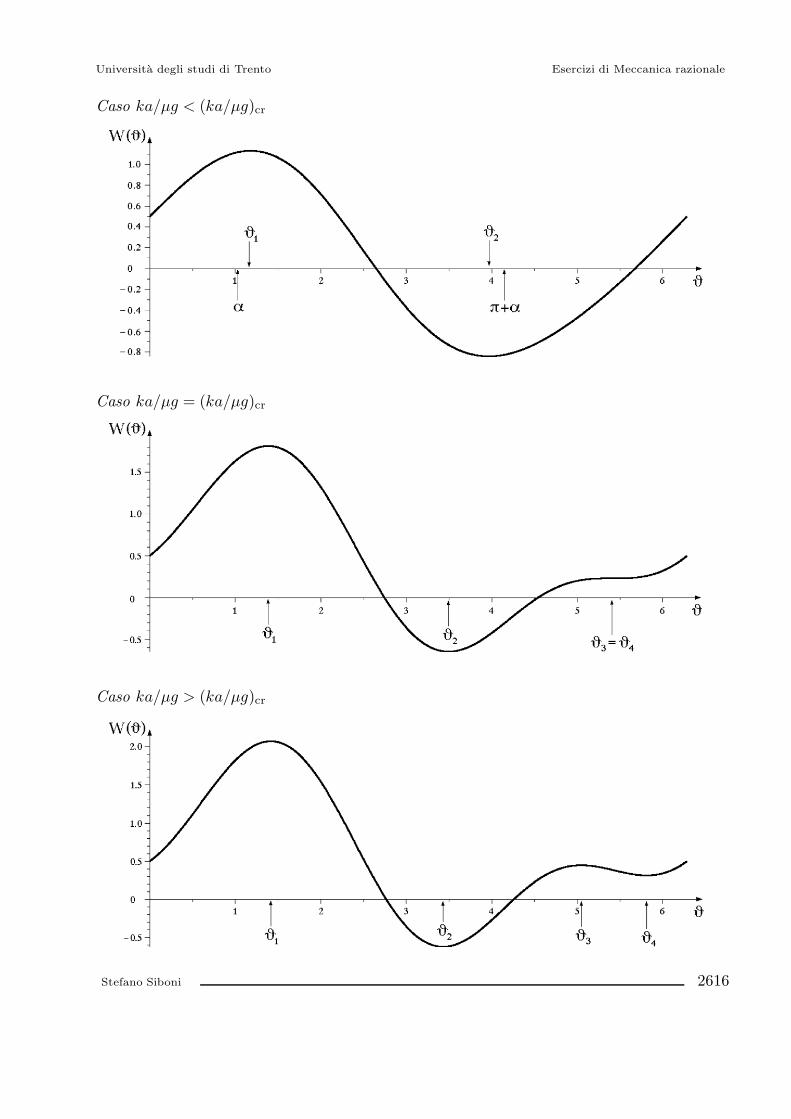
Universita degli studi di Trento Esercizi di Meccanica razionale
Caso ka/µg < (ka/µg)cr
Caso ka/µg = (ka/µg)cr
Caso ka/µg > (ka/µg)cr
Stefano Siboni 2616
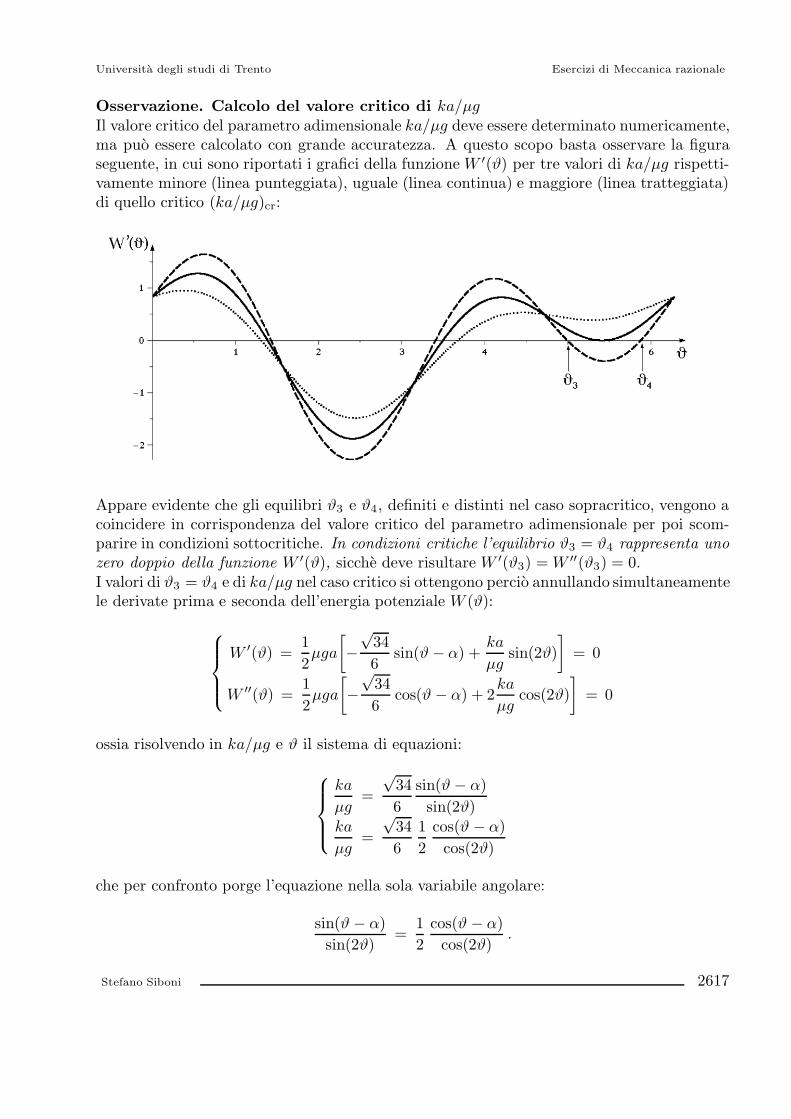
Universita degli studi di Trento Esercizi di Meccanica razionale
Osservazione. Calcolo del valore critico di ka/µgIl valore critico del parametro adimensionale ka/µg deve essere determinato numericamente,ma puo essere calcolato con grande accuratezza. A questo scopo basta osservare la figuraseguente, in cui sono riportati i grafici della funzione W "(2) per tre valori di ka/µg rispetti-vamente minore (linea punteggiata), uguale (linea continua) e maggiore (linea tratteggiata)di quello critico (ka/µg)cr:
Appare evidente che gli equilibri 23 e 24, definiti e distinti nel caso sopracritico, vengono acoincidere in corrispondenza del valore critico del parametro adimensionale per poi scom-parire in condizioni sottocritiche. In condizioni critiche l’equilibrio 23 = 24 rappresenta unozero doppio della funzione W "(2), sicche deve risultare W "(23) = W ""(23) = 0.I valori di 23 = 24 e di ka/µg nel caso critico si ottengono percio annullando simultaneamentele derivate prima e seconda dell’energia potenziale W (2):
'(()
((*
W "(2) =12µga
-!$
346
sin(2 ! ') +ka
µgsin(22)
.= 0
W ""(2) =12µga
-!$
346
cos(2 ! ') + 2ka
µgcos(22)
.= 0
ossia risolvendo in ka/µg e 2 il sistema di equazioni:
'(()
((*
ka
µg=
$346
sin(2 ! ')sin(22)
ka
µg=
$346
12
cos(2 ! ')cos(22)
che per confronto porge l’equazione nella sola variabile angolare:
sin(2 ! ')sin(22)
=12
cos(2 ! ')cos(22)
.
Stefano Siboni 2617
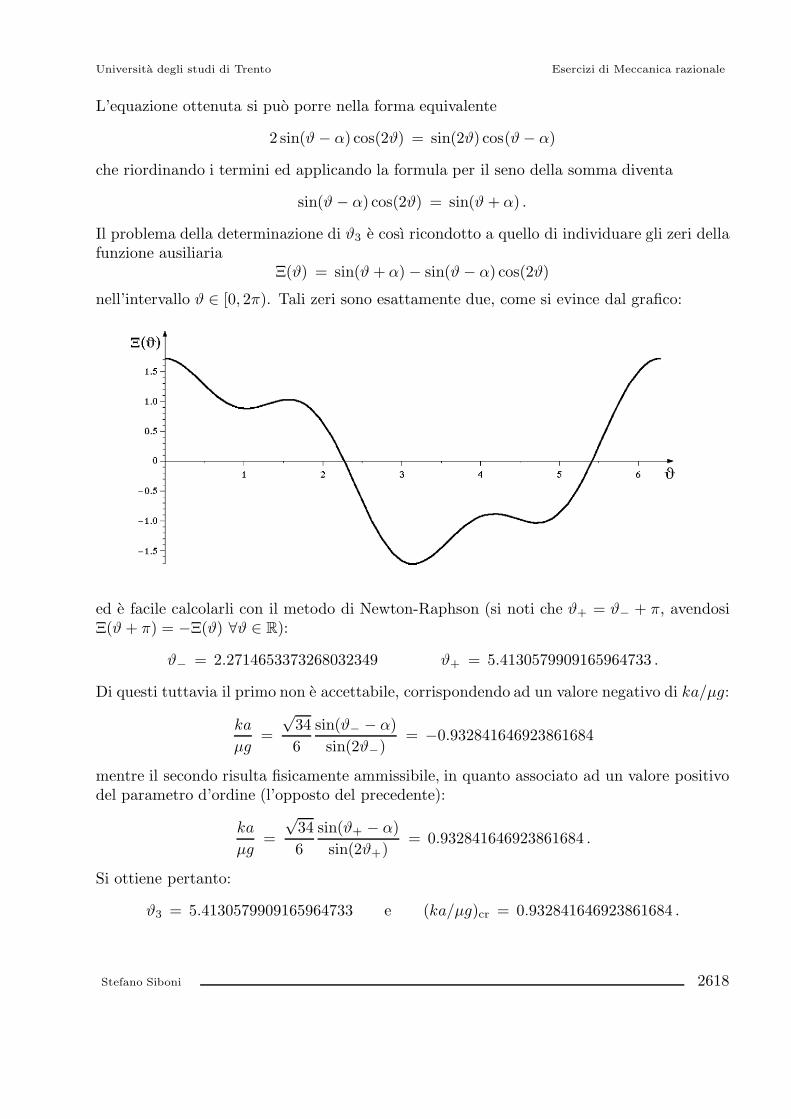
Universita degli studi di Trento Esercizi di Meccanica razionale
L’equazione ottenuta si puo porre nella forma equivalente
2 sin(2 ! ') cos(22) = sin(22) cos(2 ! ')
che riordinando i termini ed applicando la formula per il seno della somma diventa
sin(2 ! ') cos(22) = sin(2 + ') .
Il problema della determinazione di 23 e cosı ricondotto a quello di individuare gli zeri dellafunzione ausiliaria
'(2) = sin(2 + ') ! sin(2 ! ') cos(22)
nell’intervallo 2 " [0, 2"). Tali zeri sono esattamente due, come si evince dal grafico:
ed e facile calcolarli con il metodo di Newton-Raphson (si noti che 2+ = 2! + ", avendosi'(2 + ") = !'(2) %2 " R):
2! = 2.2714653373268032349 2+ = 5.4130579909165964733 .
Di questi tuttavia il primo non e accettabile, corrispondendo ad un valore negativo di ka/µg:
ka
µg=
$346
sin(2! ! ')sin(22!)
= !0.932841646923861684
mentre il secondo risulta fisicamente ammissibile, in quanto associato ad un valore positivodel parametro d’ordine (l’opposto del precedente):
ka
µg=
$346
sin(2+ ! ')sin(22+)
= 0.932841646923861684 .
Si ottiene pertanto:
23 = 5.4130579909165964733 e (ka/µg)cr = 0.932841646923861684 .
Stefano Siboni 2618

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 503. Moto di una carica puntiforme vincolata ad un piano liscio nelcampo magnetico di fili paralleli complanari percorsi da correnti stazionarieNel piano coordinato Oxy di una terna cartesiana ortogonale destra Oxyz 5 Oe1e2e3 duefili conduttori rettilinei ed infiniti occupano le posizioni fisse individuate dalle rette x = !ae x = +a, con a costante positiva. I due fili sono percorsi da correnti elettriche stazionarie diintensita rispettive i1 e i2, che producono un campo di induzione magnetica conformementealla legge di Biot e Savart. Le correnti si intendono positive quando concordi con l’asse Oy.Nel piano Oxy e vincolata a muoversi senza attrito una particella materiale P di massa m ecarica elettrica q, che risente della forza di Lorentz dovuta al campo di induzione magneticadei fili.
Si chiede di:
(a) determinare le equazioni pure del moto della particella;
(b) individuare due integrali primi delle equazioni del moto;
(c) ridurre la dinamica del sistema ad un problema unidimensionale;
(d) scrivere le equazioni del moto in forma adimensionale;
(e) illustrare l’andamento qualitativo dei moti della particella;
(f) estendere i risultati precedenti al caso di un numero arbitrario di fili paralleli posti inun piano comune e arbitrariamente spaziati gli uni rispetto agli altri.
Soluzione(a) Equazioni pure del motoSecondo la legge di Biot e Savart il campo di induzione magnetica generato in un puntoP (x, y) del piano Oxy dal filo di corrente i1 ubicato in x = !a e dato dalla relazione
!µ0
2"
i1a + x
e3 , % y " R %x " R \ {!a} ,
Stefano Siboni 2619

Universita degli studi di Trento Esercizi di Meccanica razionale
dove µ0 indica la permeabilita magnetica del vuoto — µ0 = 2" · 10!7 — ed e3 il versoreassociato all’asse Oz della terna di riferimento. Per il campo di induzione magnetica prodottodalla corrente i2 che percorre il filo x = a vale invece l’espressione:
!µ0
2"
i2x ! a
e3 =µ0
2"
i2a ! x
e3 , % y " R , %x " R \ {a} .
La linearita delle equazioni del campo elettromagnetico consente quindi di scrivere il campodi induzione magnetica in un generico punto P (x, y) del piano Oxy nella forma
*B(x, y) =µ0
2"
$ i2a ! x
! i1a + x
%e3 =
µ0
2"X (x) e3 , % y " R , %x " R \ {!a, a} (503.1)
dove si e introdotta la funzione ausiliaria
X (x) =i2
a ! x! i1
a + x, %x " R \ {!a, a} .
La forza di Lorentz che agisce sulla particella materiale in una generica posizione P (x, y)vale allora:
*F = qP # *B(x, y) = q(x e1 + y e2) #µ0
2"X (x) e3 =
=qµ0
2"X (x)(!x e2 + y e1) =
qµ0
2"X (x)(y e1 ! x e2)
ed e quindi sempre diretta parallelamente al piano Oxy. Separando le componenti scalari,le equazioni pure del moto assumono cosı la forma
mx =qµ0
2"X (x)y my = !qµ0
2"X (x)x (503.2)
e sono definite %x " R \ {!a, a}, y " R, x " R e y " R.
(b) Due integrali primi delle equazioni del motoI due integrali primi richiesti possono essere ricavati direttamente, oppure introducendol’appropriato formalismo lagrangiano.
Energia cinetica. Deduzione direttaSe si moltiplicano le equazioni (503.2) la prima per x e la seconda per y, e si sommano poimembro a membro i risultati ottenuti, si perviene all’equazione
mxx + myy =qµ0
2"X (x)yx ! qµ0
2"X (x)xy = 0
in modo che lungo tutte le soluzioni delle equazioni del moto si ha
d
dt
-m
2(x2 + y2)
.= 0
ed un integrale primo del sistema e costituito dall’energia cinetica
T =m
2(x2 + y2) .
Stefano Siboni 2620

Universita degli studi di Trento Esercizi di Meccanica razionale
Secondo integrale primo. Derivazione direttaUn secondo integrale primo si ricava usando la seconda delle equazioni del moto (503.2).Basta notare infatti che la funzione ausiliaria(1)
5(x) = i1 ln |x + a| + i2 ln |x ! a|! (i1 + i2) ln a %x " R \ {!a, a} ,
soddisfa la condizione
5"(x) =i1
x + a+
i2x ! a
= ! i2a ! x
+i1
x + a= !X (x) %x " R \ {!a, a}
e sostituita nella seconda delle (503.2) porge
my =qµ0
2"5"(x)x =
d
dt
$qµ0
2"5(x)
%
da cui segue, portando tutti i termini a primo membro
d
dt
$my ! qµ0
2"5(x)
%= 0 .
L’integrale primo cercato risulta quindi
M(x, y) = my ! qµ0
2"5(x) = my ! qµ0
2"
Ji1 ln |x + a|+ i2 ln |x! a|! (i1 + i2) ln a
K, (503.3)
definito % y " R e %x " R \ {!a, a}.
Formalismo lagrangianoLe componenti generalizzate della forza di Lorentz possono essere espresse per mezzo di unopportuno potenziale generalizzato:
V (x, y) = !qµ0
2"5(x)y
in modo che il sistema viene rappresentato dalla lagrangiana
L =m
2(x2 + y2) ! qµ0
2"5(x)y . (503.4)
Si hanno infatti le relazioni:
d
dt
$.L
.x
%= mx
.L
.x= !qµ0
2"5"(x)y =
qµ0
2"X (x)y
.L
.y= my ! qµ0
2"5(x)
.L
.y= 0
d
dt
$.L
.y
%= my ! qµ0
2"5"(x)x = my +
qµ0
2"X (x)x
(1) l’addendo costante viene introdotto al solo scopo di rendere adimensionale gli argomenti dei logaritmi
Stefano Siboni 2621

Universita degli studi di Trento Esercizi di Meccanica razionale
dalle quali seguono le equazioni di Lagrange
mx ! qµ0
2"X (x)y = 0 my +
qµ0
2"X (x)x = 0
che coincidono con le (503.2).
Integrale primo dell’energia cinetica con il formalismo lagrangianoPoiche la lagrangiana (503.4) non contiene alcuna dipendenza esplicita dal tempo, un inte-grale primo del sistema e quello di Jacobi
H =.L
.xx +
.L
.yy ! L =
= mx x +-my ! qµ0
2"5(x)
.y !
-m
2(x2 + y2) ! qµ0
2"5(x)y
.=
m
2(x2 + y2)
che coincide con l’energia cinetica del sistema.
Secondo integrale primo con il formalismo lagrangianoLa lagrangiana (503.4) non dipende esplicitamente dalla variabile y che quindi costituisceuna coordinata ignorabile, alla quale e associato l’integrale di Poisson
py(x, y) =.L
.y= my ! qµ0
2"5(x) (503.5)
che e immediatamente identificabile con l’integrale M(x, y) in (503.3).
(c) Riduzione della dinamica del sistema ad un problema unidimensionaleDescrizione unidimensionale del motoLa presenza dell’integrale di Poisson permette di ricondurre il problema alla forma unidi-mensionale. Ricavando y dall’integrale (503.5):
y =1m
-py +
qµ0
2"5(x)
.(503.6)
e inserendo l’espressione nella prima delle equazioni (503.2) si ottiene infatti l’equazione delmoto:
mx ! qµ0
2"X (x)
1m
-py +
qµ0
2"5(x)
.= 0
che ricordando la relazione 5"(x) = !X (x) diventa
mx +d
dx
-1
2m
Jpy +
qµ0
2"5(x)
K2.
= 0 (503.7)
e per ogni valore costante dell’integrale py descrive un sistema unidimensionale posizionaleconservativo nella coordinata x. Vale la pena di osservare come allo stesso risultato si possapervenire introducendo la lagrangiana ridotta — o funzione di Routh —
R(x, x) = L ! .L
.yy =
m
2(x2 + y2) ! qµ0
2"5(x)y !
$my ! qµ0
2"5(x)
%y =
m
2x2 ! m
2y2
Stefano Siboni 2622

Universita degli studi di Trento Esercizi di Meccanica razionale
in cui la velocita y si intende espressa in termini di py e x per mezzo della (503.6):
R(x, x) =m
2x2 ! m
21
m2
Jpy +
qµ0
2"5(x)
K2=
m
2x2 ! 1
2m
Jpy +
qµ0
2"5(x)
K2.
L’equazione del moto diventa allora
d
dt
$.R
.x
%! .R
.x= 0
ovveromx +
d
dx
-1
2m
Jpy +
qµ0
2"5(x)
K2.
= 0
e coincide ovviamente con la (503.7).
Applicabilita dell’analisi di WeierstrassAll’equazione (503.7) e associato l’integrale primo
H(x, x) =m
2x2 +
12m
Jpy +
qµ0
2"5(x)
K2(503.8)
che coincide con l’energia cinetica del sistema a meno della sostituzione (503.6):
H(x, x) =m
2x2 +
m
2y2
!!!!!y = 1
m [py + qµ02# 5(x)]
e puo essere usato per applicare al sistema l’analisi qualitativa di Weierstrass dei moti.
(d) Forma adimensionale delle equazioni del motoL’equazione del moto si scrive esplicitamente come
mx +d
dx
-1
2m
Jpy +
qµ0
2"
$i1 ln
!!!x + a
a
!!!+ i2 ln!!!x ! a
a
!!!%K2.
= 0
ovvero
mx +1
2m
$qµ0i12"
%2 d
dx
-$ 2"
qµ0i1py + ln
!!!x + a
a
!!!+i2i1
ln!!!x ! a
a
!!!%2.
= 0 . (503.9)
Conviene introdurre un’ascissa e un tempo adimensionali, rispettivamente + e $ , definiti permezzo delle trasformazioni di scala
x = a + t = b $
che riesprimono l’equazione (503.9) nella forma
ma
b2
d2+
d$ 2+
12m
$qµ0i12"
%2 1a
d
d+
-$ 2"
qµ0i1py + ln |+ + 1| + i2
i1ln |+ ! 1|
%2.
= 0
Stefano Siboni 2623

Universita degli studi di Trento Esercizi di Meccanica razionale
e dopo semplici manipolazioni algebriche la riducono a
d2+
d$ 2+
b2
2
$ qµ0i12"ma
%2 d
d+
-$ 2"
qµ0i1py + ln |+ + 1| + i2
i1ln |+ ! 1|
%2.
= 0 .
Potendosi sempre assumere, senza perdita di generalita, q i1 > 0 e dunque b > 0, bastaallora porre
b =2"ma
qµ0i1> 0 e c =
2"
qµ0i1py (503.10)
per ottenere l’equazione adimensionale
d2+
d$ 2+
d
d+
-12
$c + ln |+ + 1| + i2
i1ln |+ ! 1|
%2.
= 0 (503.11)
nella quale l’orientamento del tempo non risulta invertito rispetto al sistema originale ela costante c ammette qualsiasi valore reale. In forma adimensionale l’integrale primodell’energia cinetica (503.8) diventa beninteso
K(+, d+/d$ ) =12
$d+
d$
%2+
12
$c + ln |+ + 1| + i2
i1ln |+ ! 1|
%2. (503.12)
L’equazione (503.6) che governa il moto lungo y si puo esprimere in forma adimensionaleintroducendo la trasformazione t = b$ e la nuova coordinata 0 definita da
y = a 0
per cui risultaa
b
d0
d$=
1m
py +qµ0
2"m5(a+)
ossia
d0
d$=
b
a
1m
py +b
a
qµ0
2"m5(a+) =
2"
qµoi1py +
1i1
5(a+) = c + ln |+ + 1| + i2i1
ln |+ ! 1|
e in definitivad0
d$= c + ln |+ + 1| + i2
i1ln |+ ! 1| . (503.13)
Le condizioni iniziali per le variabili adimensionalizzate si ricavano per mezzo delle ovvierelazioni:
x(0) = a +(0) y(0) = a 0(0) x(0) =a
b
d+
d$(0) y(0) =
a
b
d0
d$(0)
che forniscono:
+(0) =1ax(0) 0(0) =
1ay(0)
d+
d$(0) =
2"m
qµ0i1x(0)
d0
d$(0) =
2"m
qµ0i1y(0) .
(503.14)
Stefano Siboni 2624

Universita degli studi di Trento Esercizi di Meccanica razionale
Per scrupolo, verifichiamo che le costanti b e c definite in (503.10) sono rispettivamenteun tempo ed un coe!ciente adimensionale. A questo scopo, facciamo riferimento allegrandezze definite secondo il Sistema Internazionale. Dalla legge di Biot-Savart per il campoB prodotto ad una distanza r da un filo rettilineo infinito percorso da una corrente i,B = µ0i/2"r, si deduce la relazione dimensionale
[qB] =-qµ0i
r
.
mentre la legge di Lorentz *F = qP # *B porge
[qB] =[*F ][P ]
=MLT!2
LT!1= MT!1
e quindi, per confronto,[qµ0i] = MLT!1 .
Vale allora[b] =
J2"ma
qµ0i1
K=
[ma][qµ0i1]
=ML
MLT!1= T
e[c] =
-2"
qµ0i1py
.=
[py][qµ0i1]
=MLT!1
MLT!1= 1
come richiesto.
(e) Analisi qualitativa dei motiL’analisi di Weierstrass del moto lungo + deve essere condotta a c " R fissato, per valoricostanti strettamente positivi dell’energia cinetica adimensionalizzata (503.12):
12
$ d+
d$
%2+
12
$c + ln |+ + 1| + i2
i1ln |+ ! 1|
%2= 1 > 0
— per 1 = 0 i moti sono tutti banali, identificandosi con gli stati di quiete in una qualsiasiconfigurazione del sistema. L’energia potenziale adimensionale dal considerare e dunque
W (+) =12@c + ln |+ + 1| + ) ln |+ ! 1|
A2, + " R \ {!1,+1} , (503.15)
ed il suo grafico dipende da due parametri d’ordine: il rapporto fra le correnti ) = i2/i1 e ilcoe!ciente adimensionale c, che e legato a py e dunque ai valori iniziali di x e y:
c =2"
qµ0i1py =
2"
qµ0i1
Jmy(0) ! qµ0
2"5(x(0))
K=
2"m
qµ0i1y(0) ! 1
i15(x(0)) =
=2"m
qµ0i1y(0) ! ln
!!!!x(0)a
+ 1!!!!!
i2i1
ln!!!!x(0)a
! 1!!!! .
Stefano Siboni 2625

Universita degli studi di Trento Esercizi di Meccanica razionale
Il livello di energia adimensionalizzato 1 si associa invece ai valori iniziali di x, y:
1 =b2
ma2T = m
$ 2"
qµ0i1
%2T =
12
$ 2"m
qµ0i1
%2[x(0)2 + y(0)2] ,
mentre la condizione iniziale su y risulta di fatto irrilevante — modificarla non comportaaltro che traslare la traiettoria del punto parallelamente all’asse Oy.
Grafico dell’energia potenziale W (+)La discussione di Weierstrass richiede la determinazione di tutti i punti critici dell’energiapotenziale W (+), la cui derivata prima si scrive
W "(+) =@c + ln |+ + 1| + ) ln |+ ! 1|
A$ 1+ + 1
+ )1
+ ! 1
%, + " R \ {!1,+1}
e mostra chiaramente che i punti critici dell’energia potenziale sono tutte e sole le radicidelle equazioni nonlineari:
ln |+ + 1| + ) ln |+ ! 1| = !c e1
+ + 1+ )
1+ ! 1
= 0 .
Questa circostanza suggerisce di esaminare con dettaglio il grafico della funzione ausiliaria:
G(+) = ln |+ + 1| + ) ln |+ ! 1| , + " R \ {!1,+1} , (503.16)
che nel proprio dominio naturale ammette le derivate:
G"(+) =1
+ + 1+ )
1+ ! 1
(503.17)
G""(+) = ! 1(+ + 1)2
! )1
(+ ! 1)2. (503.18)
E opportuno distinguere il caso di ) > 0, piu semplice, da quello di ) < 0, che risulta unpoco piu complesso da discutere.
(i) Caso di ) = i2/i1 > 0Nella fattispecie l’espressione (503.18) assicura che si abbia
G""(+) < 0 % + " R \ {!1,+1}
per cui G"(+) e una funzione strettamente descrescente in ciascuno degli intervalli + "(!),!1), + " (!1,+1) e + " (+1,+)). E inoltre immediato verificare che:
lim!$!%
G"(+) = 0 lim!$!1!
G"(+) = !)
lim!$!1+
G"(+) = +) lim!$+1!
G"(+) = !)
lim!$+1+
G"(+) = +) lim!$+%
G"(+) = 0
Stefano Siboni 2626
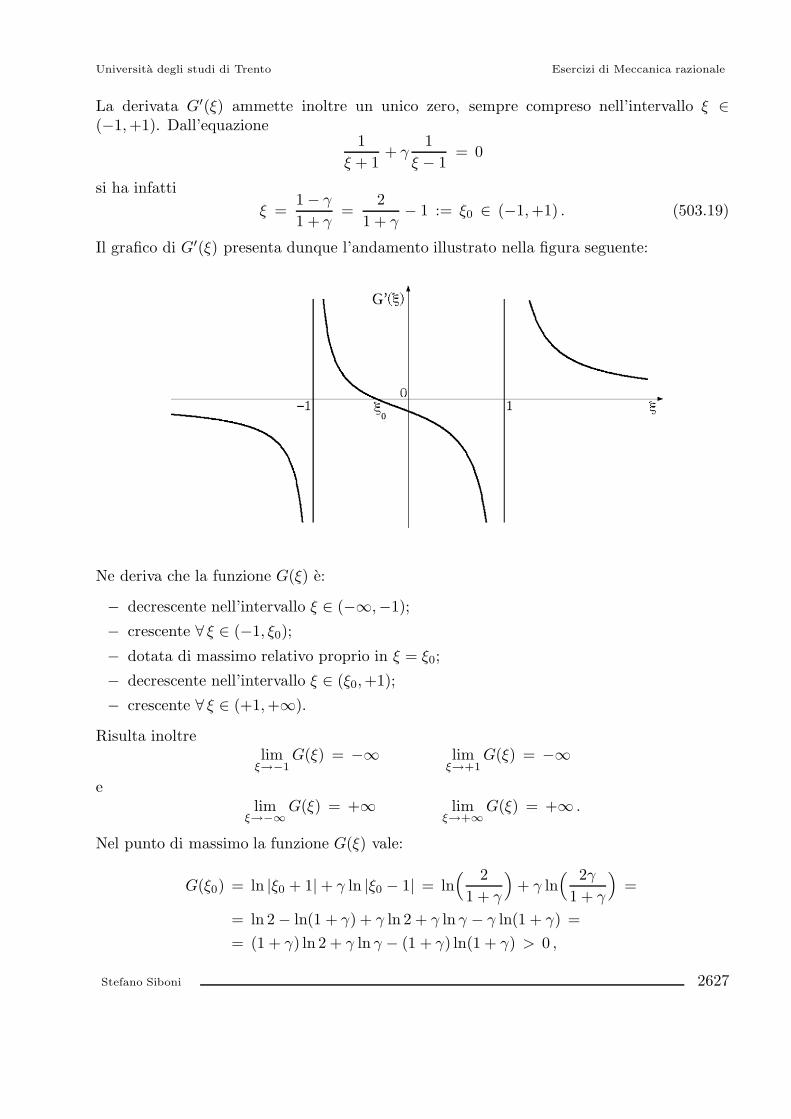
Universita degli studi di Trento Esercizi di Meccanica razionale
La derivata G"(+) ammette inoltre un unico zero, sempre compreso nell’intervallo + "(!1,+1). Dall’equazione
1+ + 1
+ )1
+ ! 1= 0
si ha infatti+ =
1 ! )
1 + )=
21 + )
! 1 := +0 " (!1,+1) . (503.19)
Il grafico di G"(+) presenta dunque l’andamento illustrato nella figura seguente:
Ne deriva che la funzione G(+) e:
! decrescente nell’intervallo + " (!),!1);! crescente % + " (!1, +0);! dotata di massimo relativo proprio in + = +0;! decrescente nell’intervallo + " (+0,+1);! crescente % + " (+1,+)).
Risulta inoltrelim
!$!1G(+) = !) lim
!$+1G(+) = !)
elim
!$!%G(+) = +) lim
!$+%G(+) = +) .
Nel punto di massimo la funzione G(+) vale:
G(+0) = ln |+0 + 1| + ) ln |+0 ! 1| = ln$ 2
1 + )
%+ ) ln
$ 2)
1 + )
%=
= ln 2 ! ln(1 + )) + ) ln 2 + ) ln ) ! ) ln(1 + )) == (1 + )) ln 2 + ) ln ) ! (1 + )) ln(1 + )) > 0 ,
Stefano Siboni 2627

Universita degli studi di Trento Esercizi di Meccanica razionale
espressione il cui segno puo essere discusso studiando la funzione ausiliaria
M(z) = (1 + z) ln 2 + z ln z ! (1 + z) ln(1 + z) z > 0
che ammette la derivata prima
M "(z) = ln 2 + ln z + 1 ! ln(1 + z) ! 1 =
= ln 2 + ln z ! ln(1 + z) = ln$ 2z
1 + z
%= ln
$2 ! 2
1 + z
%
e soddisfa le ovvie condizioni:
M "(z) < 0 % z " (0, 1), M "(1) = 0, M "(z) > 0 % z > +1 .
Appare cosı evidente che M(z) presenta un minimo assoluto in z = +1, con
M(+1) = 2 ln 2 + 1 · 0 ! 2 ln 2 = 0 ,
proprieta cui vanno ad aggiungersi le condizioni ai limiti
limz$0+
M(z) = ln2
e
limz$+%
M(z) = limz$+%
ln-
21+zzz
(1 + z)1+z
.= ln
-lim
z$+%
21+zzz
(1 + z)1+z
.=
= ln
Mlim
z$+%
21+z
1 + z
1$1 +
1z
%z
N= ln
Mlim
z$+%
21+z
1 + z
1e
N= +) .
Si conclude che G(+0) > 0 per ogni ) > 0 salvo che per ) = 1, nel qual caso risulta G(+0) = 0.Il grafico di G(+) ha pertanto l’andamentro mostrato nella figura seguente:
Stefano Siboni 2628
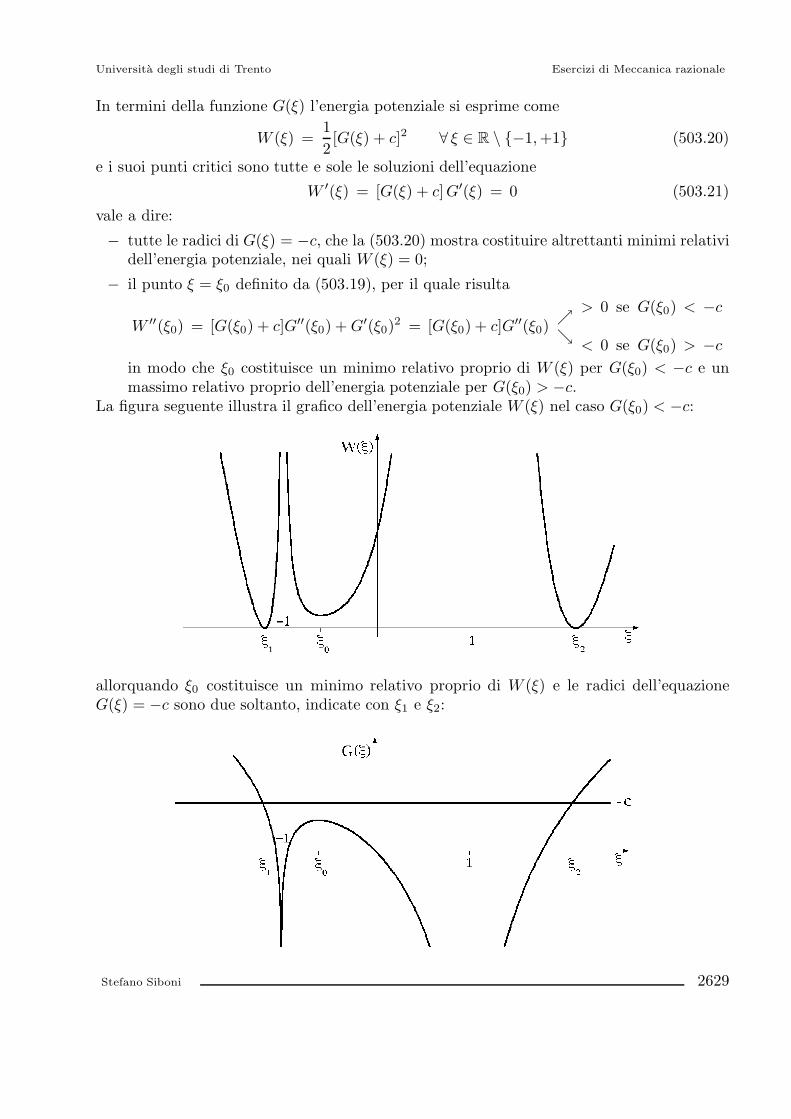
Universita degli studi di Trento Esercizi di Meccanica razionale
In termini della funzione G(+) l’energia potenziale si esprime come
W (+) =12[G(+) + c]2 % + " R \ {!1,+1} (503.20)
e i suoi punti critici sono tutte e sole le soluzioni dell’equazioneW "(+) = [G(+) + c]G"(+) = 0 (503.21)
vale a dire:! tutte le radici di G(+) = !c, che la (503.20) mostra costituire altrettanti minimi relativi
dell’energia potenziale, nei quali W (+) = 0;! il punto + = +0 definito da (503.19), per il quale risulta
W ""(+0) = [G(+0) + c]G""(+0) + G"(+0)2 = [G(+0) + c]G""(+0)34
> 0 se G(+0) < !c
< 0 se G(+0) > !c
in modo che +0 costituisce un minimo relativo proprio di W (+) per G(+0) < !c e unmassimo relativo proprio dell’energia potenziale per G(+0) > !c.
La figura seguente illustra il grafico dell’energia potenziale W (+) nel caso G(+0) < !c:
allorquando +0 costituisce un minimo relativo proprio di W (+) e le radici dell’equazioneG(+) = !c sono due soltanto, indicate con +1 e +2:
Stefano Siboni 2629
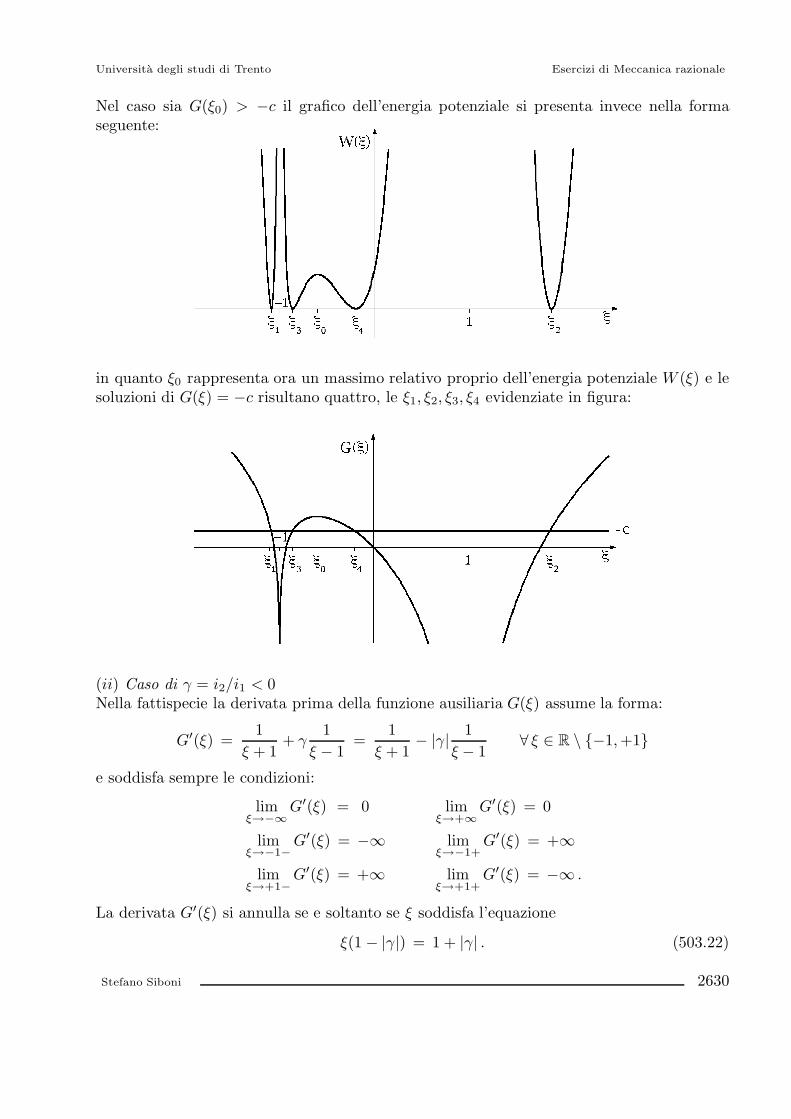
Universita degli studi di Trento Esercizi di Meccanica razionale
Nel caso sia G(+0) > !c il grafico dell’energia potenziale si presenta invece nella formaseguente:
in quanto +0 rappresenta ora un massimo relativo proprio dell’energia potenziale W (+) e lesoluzioni di G(+) = !c risultano quattro, le +1, +2, +3, +4 evidenziate in figura:
(ii) Caso di ) = i2/i1 < 0Nella fattispecie la derivata prima della funzione ausiliaria G(+) assume la forma:
G"(+) =1
+ + 1+ )
1+ ! 1
=1
+ + 1! |)| 1
+ ! 1% + " R \ {!1,+1}
e soddisfa sempre le condizioni:
lim!$!%
G"(+) = 0 lim!$+%
G"(+) = 0
lim!$!1!
G"(+) = !) lim!$!1+
G"(+) = +)
lim!$+1!
G"(+) = +) lim!$+1+
G"(+) = !) .
La derivata G"(+) si annulla se e soltanto se + soddisfa l’equazione
+(1 ! |)|) = 1 + |)| . (503.22)
Stefano Siboni 2630
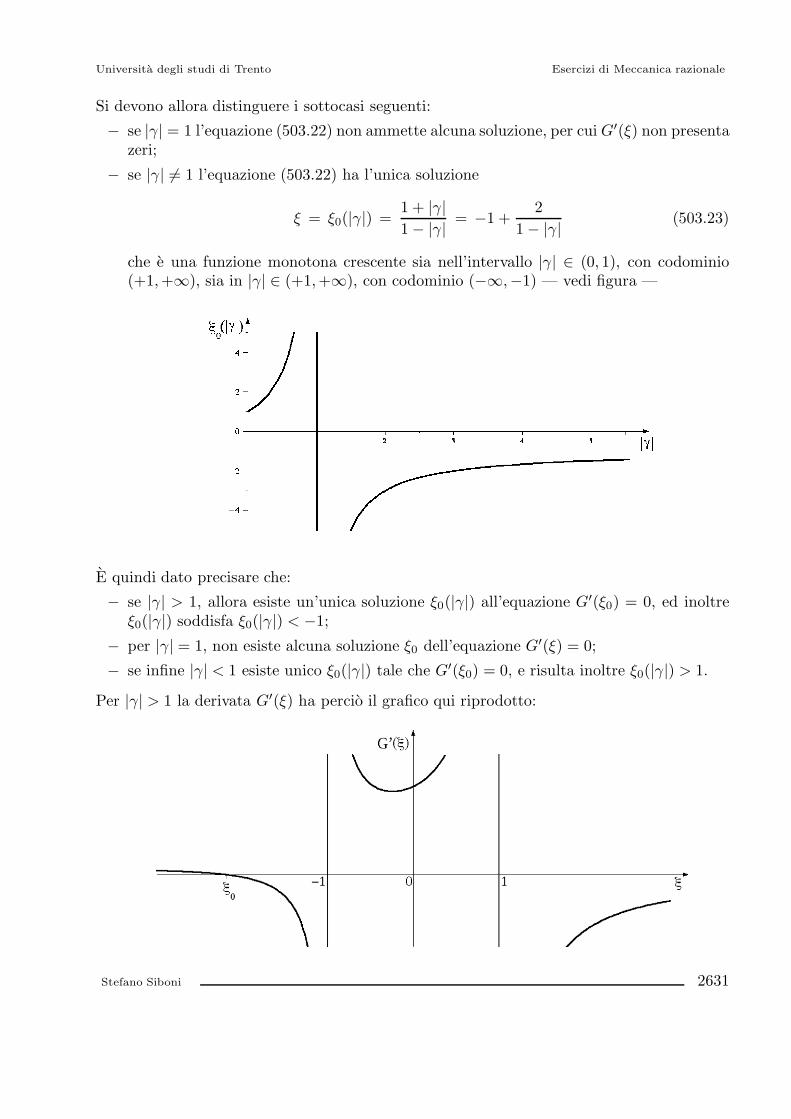
Universita degli studi di Trento Esercizi di Meccanica razionale
Si devono allora distinguere i sottocasi seguenti:! se |)| = 1 l’equazione (503.22) non ammette alcuna soluzione, per cui G"(+) non presenta
zeri;! se |)| &= 1 l’equazione (503.22) ha l’unica soluzione
+ = +0(|)|) =1 + |)|1 ! |)| = !1 +
21 ! |)| (503.23)
che e una funzione monotona crescente sia nell’intervallo |)| " (0, 1), con codominio(+1,+)), sia in |)| " (+1,+)), con codominio (!),!1) — vedi figura —
E quindi dato precisare che:! se |)| > 1, allora esiste un’unica soluzione +0(|)|) all’equazione G"(+0) = 0, ed inoltre
+0(|)|) soddisfa +0(|)|) < !1;! per |)| = 1, non esiste alcuna soluzione +0 dell’equazione G"(+) = 0;! se infine |)| < 1 esiste unico +0(|)|) tale che G"(+0) = 0, e risulta inoltre +0(|)|) > 1.
Per |)| > 1 la derivata G"(+) ha percio il grafico qui riprodotto:
Stefano Siboni 2631
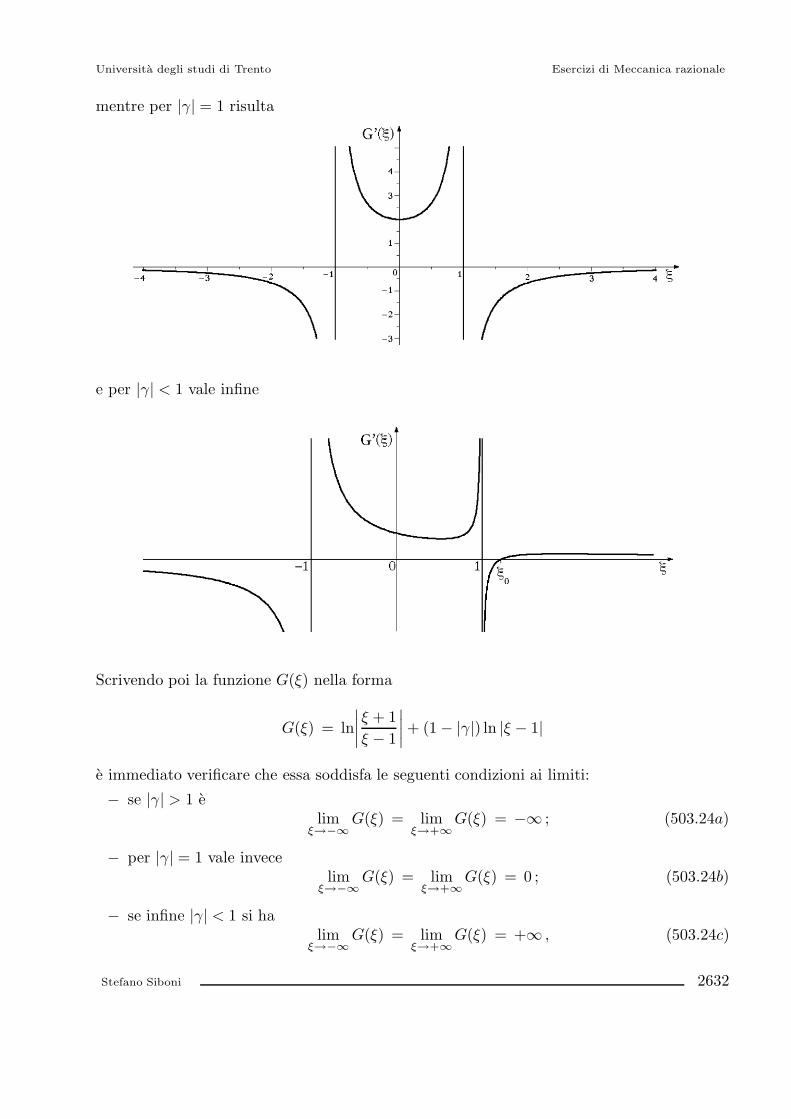
Universita degli studi di Trento Esercizi di Meccanica razionale
mentre per |)| = 1 risulta
e per |)| < 1 vale infine
Scrivendo poi la funzione G(+) nella forma
G(+) = ln!!!!+ + 1+ ! 1
!!!!+ (1 ! |)|) ln |+ ! 1|
e immediato verificare che essa soddisfa le seguenti condizioni ai limiti:! se |)| > 1 e
lim!$!%
G(+) = lim!$+%
G(+) = !) ; (503.24a)
! per |)| = 1 vale invecelim
!$!%G(+) = lim
!$+%G(+) = 0 ; (503.24b)
! se infine |)| < 1 si halim
!$!%G(+) = lim
!$+%G(+) = +) , (503.24c)
Stefano Siboni 2632

Universita degli studi di Trento Esercizi di Meccanica razionale
mentre e comunque:
lim!$!1
G(+) = !) e lim!$+1
G(+) = +) .
Si conclude pertanto che per |)| > 1 il grafico di G(+) dovra avere l’andamento evidenziatoin figura:
Si osservi in particolare che il valore della funzione nel massimo relativo proprio +0(|)|)risulta sempre negativo per |)| > 1:
G(+0) = ln |+0 + 1|! |)| ln |+0 ! 1| = ln!!!!
21 ! |)|
!!!!! |)| ln
!!!!!2|)|
1 ! |)|
!!!!! =
= (1 ! |)|) ln 2 + (|)|! 1) ln(|)|! 1) ! |)| ln |)| < 0 % |)| > 1 .
Basta infatti considerare la funzione ausiliaria
K(z) = (1 ! z) ln 2 + (z ! 1) ln(z ! 1) ! z ln z , z > +1 ,
e la relativa derivata prima
K "(z) = ! ln 2 + ln(z ! 1) + 1 ! ln z ! 1 = ln-12
$1 ! 1
z
%., z > +1 ,
sempre di segno negativo se z > 1, per convincersi che K(z) e decrescente in z " (+1,+)),mentre e
limz$1+
K(z) = limz$1+
[(1 ! z) ln 2 + (z ! 1) ln(z ! 1) ! z ln z] =
= limz$1+
(z ! 1) ln(z ! 1) = limz!1$0+
(z ! 1) ln(z ! 1) = 0
in modo che la funzione K(z) verifica la condizione
K(z) < 0 % z > 1
Stefano Siboni 2633
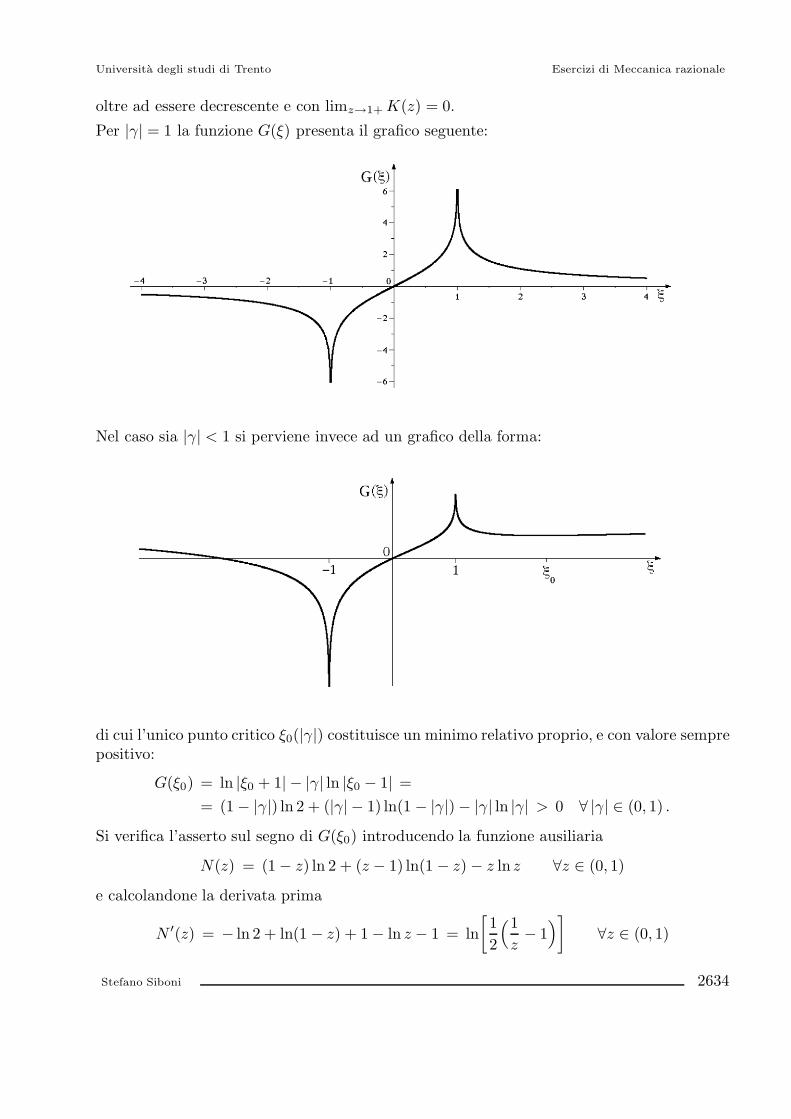
Universita degli studi di Trento Esercizi di Meccanica razionale
oltre ad essere decrescente e con limz$1+ K(z) = 0.Per |)| = 1 la funzione G(+) presenta il grafico seguente:
Nel caso sia |)| < 1 si perviene invece ad un grafico della forma:
di cui l’unico punto critico +0(|)|) costituisce un minimo relativo proprio, e con valore semprepositivo:
G(+0) = ln |+0 + 1|! |)| ln |+0 ! 1| == (1 ! |)|) ln 2 + (|)|! 1) ln(1 ! |)|) ! |)| ln |)| > 0 % |)| " (0, 1) .
Si verifica l’asserto sul segno di G(+0) introducendo la funzione ausiliaria
N(z) = (1 ! z) ln 2 + (z ! 1) ln(1 ! z) ! z ln z %z " (0, 1)
e calcolandone la derivata prima
N "(z) = ! ln 2 + ln(1 ! z) + 1 ! ln z ! 1 = ln-12
$1z! 1
%.%z " (0, 1)
Stefano Siboni 2634
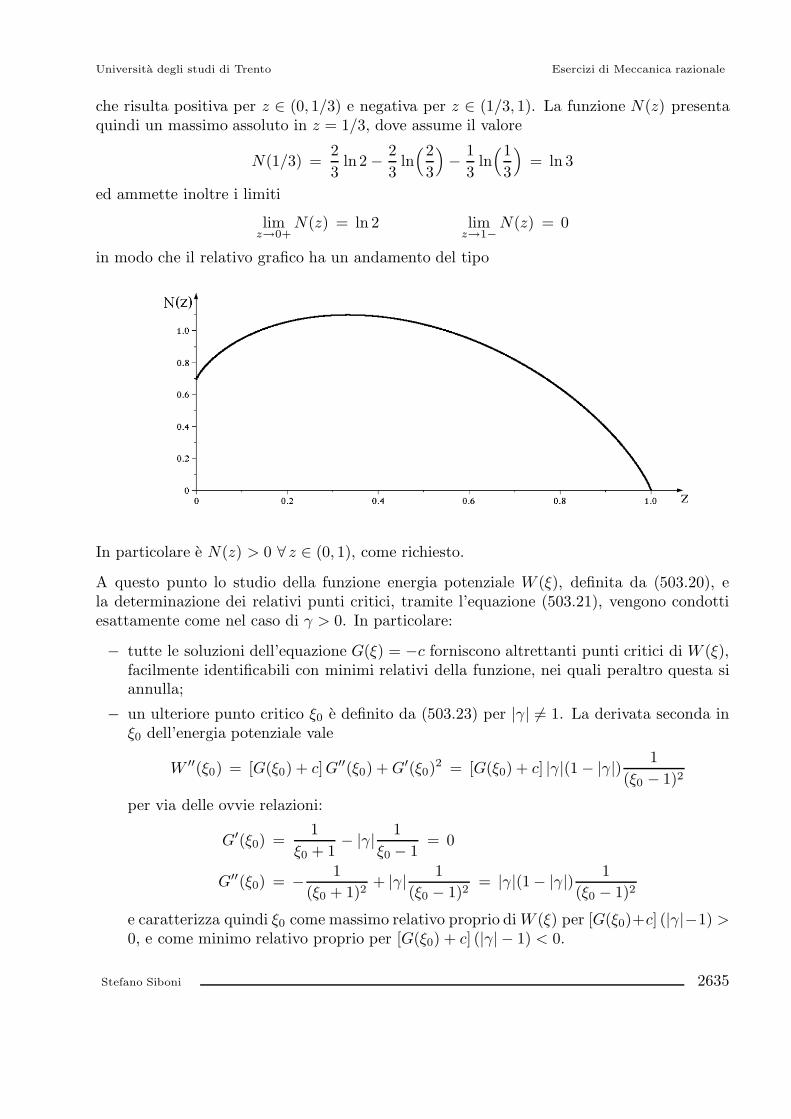
Universita degli studi di Trento Esercizi di Meccanica razionale
che risulta positiva per z " (0, 1/3) e negativa per z " (1/3, 1). La funzione N(z) presentaquindi un massimo assoluto in z = 1/3, dove assume il valore
N(1/3) =23
ln 2 ! 23
ln$2
3
%! 1
3ln$1
3
%= ln 3
ed ammette inoltre i limiti
limz$0+
N(z) = ln 2 limz$1!
N(z) = 0
in modo che il relativo grafico ha un andamento del tipo
In particolare e N(z) > 0 % z " (0, 1), come richiesto.
A questo punto lo studio della funzione energia potenziale W (+), definita da (503.20), ela determinazione dei relativi punti critici, tramite l’equazione (503.21), vengono condottiesattamente come nel caso di ) > 0. In particolare:
! tutte le soluzioni dell’equazione G(+) = !c forniscono altrettanti punti critici di W (+),facilmente identificabili con minimi relativi della funzione, nei quali peraltro questa siannulla;
! un ulteriore punto critico +0 e definito da (503.23) per |)| &= 1. La derivata seconda in+0 dell’energia potenziale vale
W ""(+0) = [G(+0) + c]G""(+0) + G"(+0)2 = [G(+0) + c] |)|(1 ! |)|) 1(+0 ! 1)2
per via delle ovvie relazioni:
G"(+0) =1
+0 + 1! |)| 1
+0 ! 1= 0
G""(+0) = ! 1(+0 + 1)2
+ |)| 1(+0 ! 1)2
= |)|(1! |)|) 1(+0 ! 1)2
e caratterizza quindi +0 come massimo relativo proprio di W (+) per [G(+0)+c] (|)|!1) >0, e come minimo relativo proprio per [G(+0) + c] (|)|! 1) < 0.
Stefano Siboni 2635
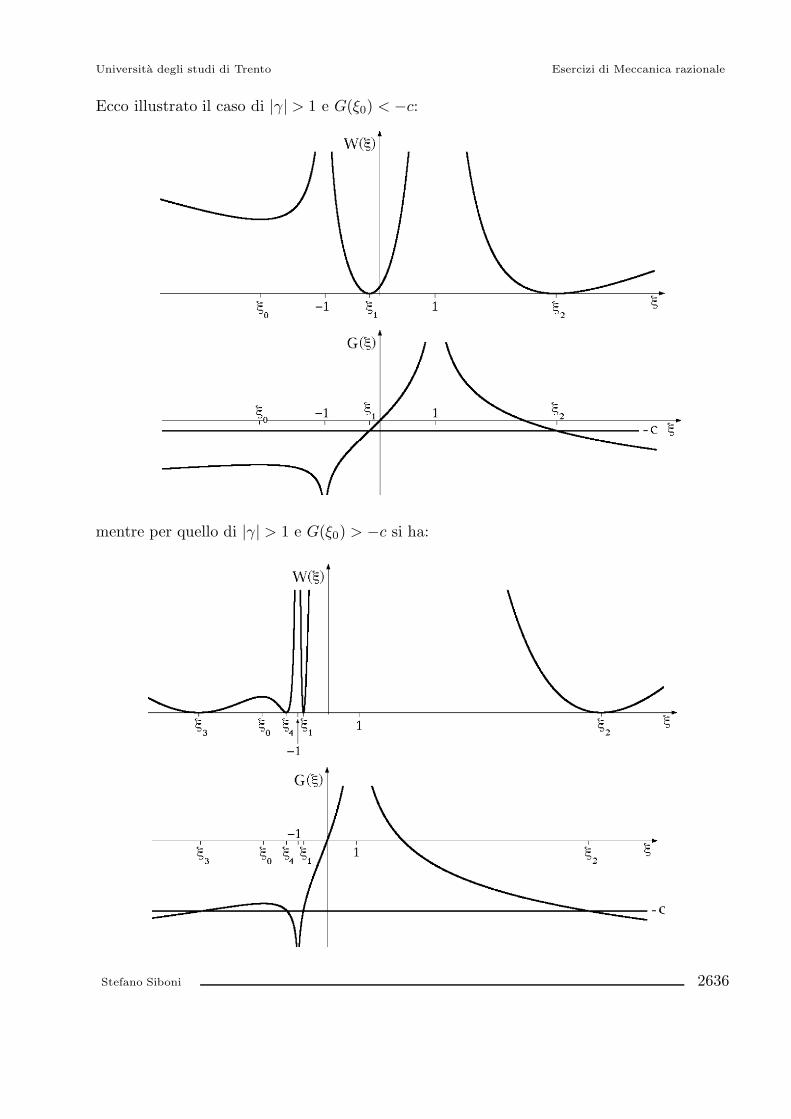
Universita degli studi di Trento Esercizi di Meccanica razionale
Ecco illustrato il caso di |)| > 1 e G(+0) < !c:
mentre per quello di |)| > 1 e G(+0) > !c si ha:
Stefano Siboni 2636
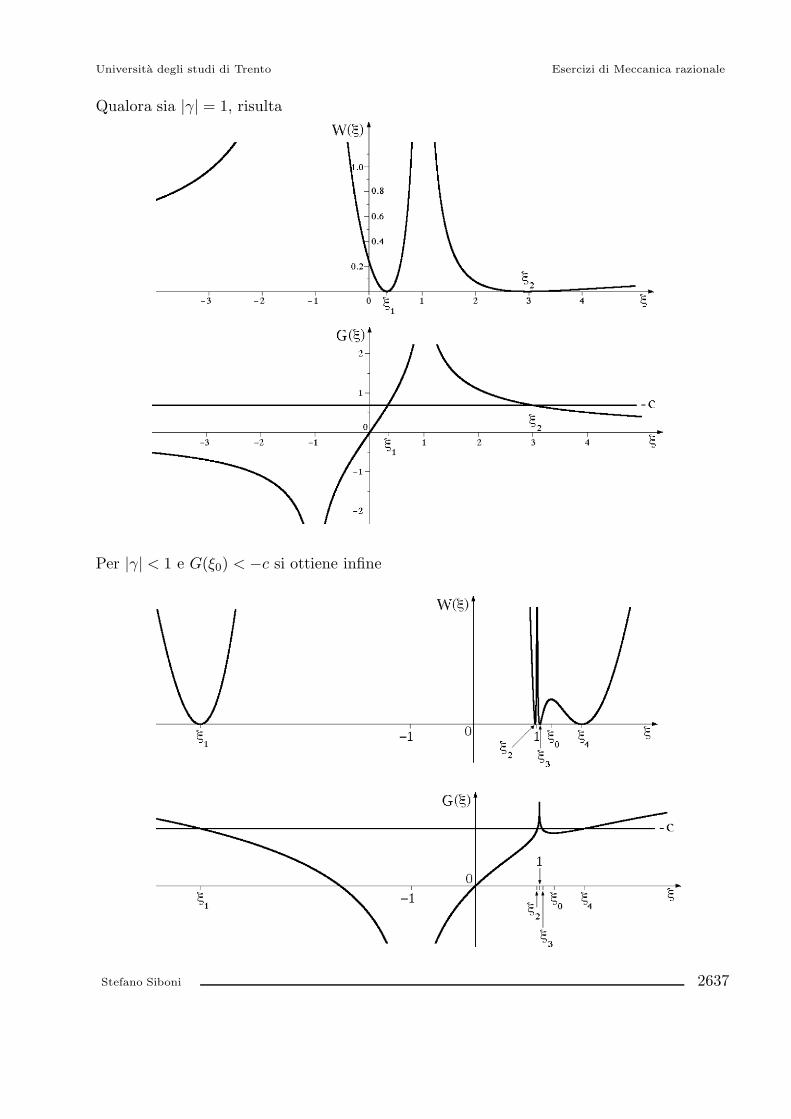
Universita degli studi di Trento Esercizi di Meccanica razionale
Qualora sia |)| = 1, risulta
Per |)| < 1 e G(+0) < !c si ottiene infine
Stefano Siboni 2637
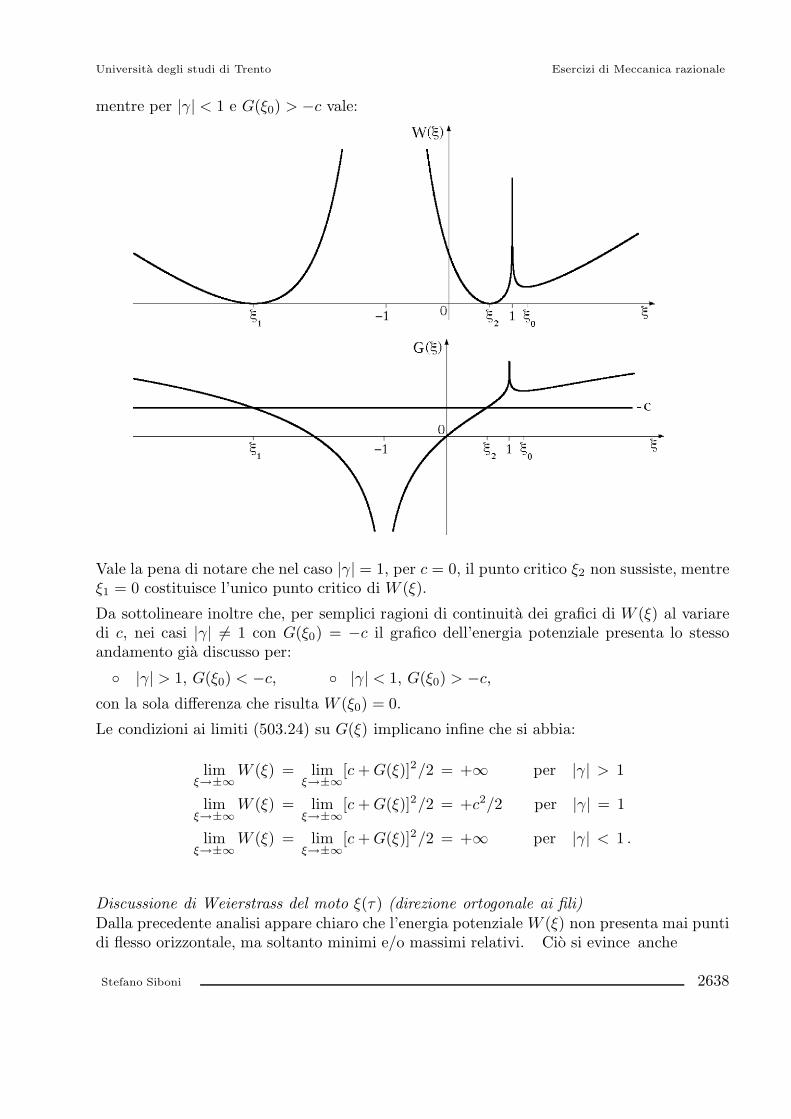
Universita degli studi di Trento Esercizi di Meccanica razionale
mentre per |)| < 1 e G(+0) > !c vale:
Vale la pena di notare che nel caso |)| = 1, per c = 0, il punto critico +2 non sussiste, mentre+1 = 0 costituisce l’unico punto critico di W (+).
Da sottolineare inoltre che, per semplici ragioni di continuita dei grafici di W (+) al variaredi c, nei casi |)| &= 1 con G(+0) = !c il grafico dell’energia potenziale presenta lo stessoandamento gia discusso per:
. |)| > 1, G(+0) < !c, . |)| < 1, G(+0) > !c,
con la sola di"erenza che risulta W (+0) = 0.
Le condizioni ai limiti (503.24) su G(+) implicano infine che si abbia:
lim!$±%
W (+) = lim!$±%
[c + G(+)]2/2 = +) per |)| > 1
lim!$±%
W (+) = lim!$±%
[c + G(+)]2/2 = +c2/2 per |)| = 1
lim!$±%
W (+) = lim!$±%
[c + G(+)]2/2 = +) per |)| < 1 .
Discussione di Weierstrass del moto +($ ) (direzione ortogonale ai fili)Dalla precedente analisi appare chiaro che l’energia potenziale W (+) non presenta mai puntidi flesso orizzontale, ma soltanto minimi e/o massimi relativi. Cio si evince anche
Stefano Siboni 2638
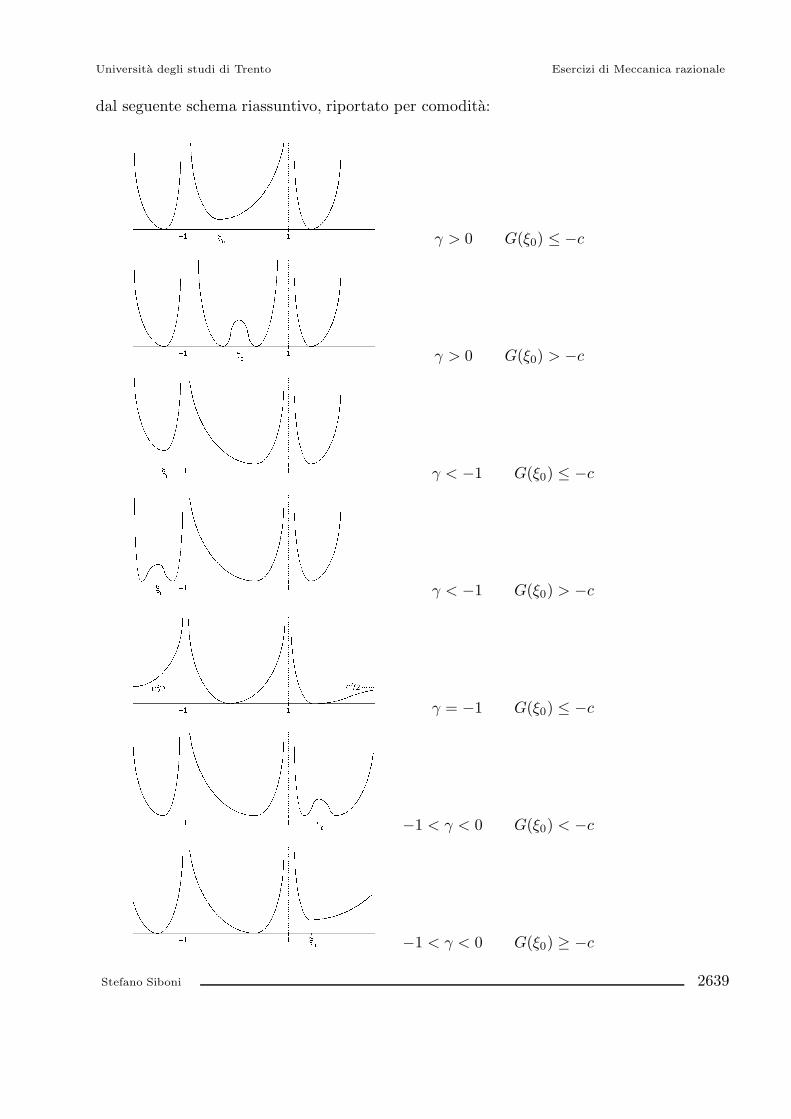
Universita degli studi di Trento Esercizi di Meccanica razionale
dal seguente schema riassuntivo, riportato per comodita:
) > 0 G(+0) ' !c
) > 0 G(+0) > !c
) < !1 G(+0) ' !c
) < !1 G(+0) > !c
) = !1 G(+0) ' !c
!1 < ) < 0 G(+0) < !c
!1 < ) < 0 G(+0) ( !c
Stefano Siboni 2639

Universita degli studi di Trento Esercizi di Meccanica razionale
I criteri di Weierstrass portano allora a concludere che i moti +($ ) sono sempre periodici ocostanti, salvo che nei casi sottoelencati.
(1) Per ) > 0, G(+0) > !c, se 1 = W (+0) ed il valore iniziale +(0) appartiene all’intervallo+ " (!1, +0) oppure all’intervallo + " (+0,+1). In tal caso la soluzione massimale +($ )e confinata nello stesso intervallo in cui viene assegnato il dato iniziale, e ha metaasintotica +0 tanto nel passato quanto nel futuro.
(2) Per ) < !1, G(+0) > !c, se 1 = W (+0) e +(0) < !1. La soluzione +($ ) ha le stessecaratteristiche del caso precedente, eccetto che +($ ) < !1 a tutti i tempi $ .
(3) Per ) = !1, G(+0) ' !c, se 1 > c2/2 e +(0) < !1 oppure +(0) > +1. Nel primo casola soluzione completa +($ ) presenta un unico punto di inversione e tende a + = !)tanto nel passato quanto nel futuro; nel secondo caso +($ ) ammette un solo punto diinversione e diverge a + = +) nel passato come nel futuro.
(4) Per !1 < ) < 0, G(+0) < !c, se 1 = W (+0) e +(0) > +1. La soluzione massimale +($ )ha lo stesso andamento discusso nel caso (1), salvo il fatto che la soluzione e ubicatanella semiretta + > +1.
Si osservi che tutte le soluzioni massimali +($ ) sono definite % $ " R. L’a"ermazione e ovviaper tutti i moti salvo quelli considerati al precedente punto (3), i soli non limitati. Per questisi ha, tuttavia,
W (+) !!!!!!!!*!$±%
c2/2
e la conservazione dell’energia implica che valga, per |+| grande
12
$d+
d$
%2= 1 ! W (+) 6 1 ! c2
2> 0 (503.25)
per cui la soluzione +($ ) e definita a tutti i tempi ed assume un andamento sostanzialmenteuniforme per |$ | 7 0.
Moto 0($ ) — direzione parallela ai filiUna volta integrato il moto +($ ), quello lungo 0($ ) si ricava con una quadratura attraversol’equazione (503.13):
d0
d$= c + ln |+ + 1| + ) ln |+ ! 1| , (503.26)
che porge l’espressione
0($ ) = 0(0) + c $ +"6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|
Kd$ " (503.27)
dalla quale peraltro si deduce facilmente l’andamento qualitativo della soluzione. Si esa-minano i vari casi.
Stefano Siboni 2640

Universita degli studi di Trento Esercizi di Meccanica razionale
! Soluzioni +($ ) costantiPer le soluzioni del tipo +($ ) = +(0), costante, % $ " R l’equazione (503.27) fornisce lasoluzione
0($ ) = 0(0) +Jc + ln |+(0) + 1| + ) ln |+(0) ! 1|
K$ .
Quello descritto e dunque un moto rettilineo uniforme lungo una retta parallela ai fili.Si tratta della retta compresa fra i due fili in corrispondenza della quale i campi diinduzione magnetica prodotta dalle due correnti si annullano vicendevolmente.
! Soluzioni +($ ) periodicheNel caso di una soluzione periodica +($ ), di minimo periodo positivo T
+($ + T ) = +($ ) % $ " R ,
la corrispondente soluzione 0($ ) e data dalla somma di un termine lineare e di unoperiodico di pari periodo T . Posto infatti:
( =1T
T6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|
Kd$ " ,
si ha l’espressione:
0($ ) = 0(0) + (c + () $ +"6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|! (
Kd$ " (503.28)
nella quale l’integrale
'($ ) ="6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|! (
Kd$ "
definisce una funzione di periodo T :
'($ + T ) ="+T6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|! (
Kd$ " =
="6
0
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|! (
Kd$ "+
+"+T6
"
Jln |+($ ") + 1| + ) ln |+($ ") ! 1|! (
Kd$ " =
= '($ ) +T6
0
Jln |+($ "") + 1| + ) ln |+($ "") ! 1|!(
Kd$ "" =
Stefano Siboni 2641

Universita degli studi di Trento Esercizi di Meccanica razionale
= '($ ) +T6
0
Jln |+($ "") + 1| + ) ln |+($ "") ! 1|
Kd$ "" ! (T =
= '($ ) + T (! (T = '($ ) % $ " R .
Il moto nella direzione dei fili e quindi descritto da una deriva uniforme alla qualesi sovrappone un moto oscillatorio che ha lo stesso periodo del moto nella direzioneortogonale ai fili. La figura seguente mostra il tipico andamento della soluzione (503.28):
! Soluzioni +($ ) a meta asintoticaLungo tutti i moti +($ ) a meta asintotica risulta
limt$!%
+($ ) = limt$+%
+($ ) = +0
e per |$ | 7 0 e dunque lecito scrivere:
d0
d$/ c + ln |+0 + 1| + ) ln |+0 ! 1| = costante .
Ne deriva che mentre il moto lungo la direzione ortogonale ai fili tende asintoticamente a+0, quello lungo la direzione dei fili si approssima asintoticamente ad un moto uniforme— nel passato come nel futuro.
! Soluzioni +($ ) che divergono a + = +) o + = !)Queste soluzioni +($ ) sono tutte e sole quelle corrispondenti alle condizioni considerateal precedente punto (3), quindi ricorrono soltanto per ) = !1, G(+0) ' !c e 1 > c2/2,se +(0) < !1 o +(0) > +1 rispettivamente. Per $ * +) e $ * !) l’equazione (503.26)assume allora la forma approssimata
d0
d$= c + ln |+ + 1| + ) ln |+ ! 1| = c + ln
!!!!+ + 1+ ! 1
!!!! / c .
Stefano Siboni 2642

Universita degli studi di Trento Esercizi di Meccanica razionale
Tenuto conto anche della (503.25), si conclude cosı che per |$ | 7 0 tanto il moto lungo ladirezione ortogonale ai fili quanto quello parallelo agli stessi diventano asintoticamenteuniformi. Questa circostanza e imputabile fisicamente al fatto che per ) = !1 lecorrenti i1 e i2 sono opposte e la coppia di fili, considerata a grande distanza, puo circariguardarsi come un unico filo percorso da una corrente nulla; ne deriva che il campodi induzione nei punti con + 7 1 o + 8 !1 deve ritenersi trascurabile, perche i campidi induzione prodotti dai singoli fili tendono ad elidersi pressoche perfettamente l’unl’altro. Piu precisamente, in coordinate fisiche l’equazione (503.1) diventa
*B(x) =µ0
2"
$ i2a ! x
! i1a + x
%e3 =
µ0i12"
$ )
a ! x! i1
a + x
%e3 =
= !µ0i12"
$ 1a ! x
+i1
a + x
%e3 =
µ0i1a
"
1x2 ! a2
e3 %x " R \ {!a,+a}
e per grandi |x| mostra un decremento del tipo 6 1/x2, molto piu rapido di quellostandard 6 1/|x|.
(f) Estensione ad un numero arbitrario di fili paralleliSi supponga che nello stesso piano coordinato Oxy siano collocati n fili conduttori rettilineiinfiniti e paralleli. Il k-esimo filo occupi la retta di equazione x = ak e sia percorso da unacorrente stazionaria ik, con ak e ik costanti reali assegnate % k = 1, . . . , n. Le correnti ikpossono considerarsi positive se concordi con l’asse Oy. Il punto materiale P , di massa m ecarica elettrica q, sia vincolato a scorrere senza attrito lungo il piano coordinato Oxy.
Anche in questo caso e possibile ricondurre l’analisi dinamica del sistema ad un problemapuramente unidimensionale. Il campo di induzione magnetica generato dal sistema di fili inuna generica posizione (x, y) del piano vincolare e sempre dato dalla legge di Biot e Savart,sovrapponendo i contributi di tutte le correnti
*B(x, y) =n9
k=1
!µ0
2"
ikx ! ak
e3 = !µ0
2"
n9
k=1
ikx ! ak
e3 = B(x) e3
Stefano Siboni 2643

Universita degli studi di Trento Esercizi di Meccanica razionale
ed e definito % y " R e %x " R\{a1, . . . , an} — cioe in tutti i punti esterni ai fili. L’equazionedi"erenziale del moto di P si scrive percio
mx e1 + my e2 = mP = q P # *B = q
!!!!!!
e1 e2 e3
x y 00 0 B(x)
!!!!!!= qB(x)(y e1 ! x e2)
ed equivale al sistema di due equazioni scalari del secondo ordine
Bmx = qB(x) y
my = !qB(x) x .(503.29)
E immediato individuare una funzione #(x) tale che #"(x) = B(x) %x " R \ {a1, . . . , an}.Basta porre infatti
#(x) = !µ0
2"
n9
k=1
ik ln!!!!x ! ak
a
!!!! %x " R \ {a1, . . . , an} , (503.30)
dove a e una qualsiasi distanza caratteristica del sistema, introdotta al solo scopo di adi-mensionalizzare gli argomenti dei logaritmi — potrebbe identificarsi con la distanza fra duefili adiacenti, ad esempio. La seconda delle equazioni (503.29) diventa dunque
my = !q #"(x) x = !qd
dt[#(x)] =
d
dt[!q #(x)]
per cuid
dt
Jmy + q #(x)
K= 0
e la funzionepy(x, y) = my + q #(x)
costituisce una costante del moto del sistema. Essendo py fisso, con la sostituzione
y =1m
7py ! q #(x)
8(503.31)
la prima delle equazioni (503.29) si riduce ad una equazione di"erenziale della sola x:
mx = qB(x)1m
[py ! q #(x)] = q #"(x)1m
7py ! q #(x)
8
ossia
mx +d
dx
-1
2m
7py ! q #(x)
82.
= 0 .
Stefano Siboni 2644

Universita degli studi di Trento Esercizi di Meccanica razionale
Questa equazione del moto unidimensionale si risolve ricorrendo all’analisi di Weierstrass,grazie all’ovvio integrale primo dell’energia meccanica:
H(x, x) =m
2x2 +
12m
7py ! q #(x)
82
dove l’energia potenziale e data da
W (x) =1
2m
7py ! q #(x)
82.
Si osservi che in virtu della (503.31) l’energia meccanica H(x, x) coincide numericamentecon l’energia cinetica m(x2 + y2)/2 del moto. Una volta ricavato x(t), si determina il motoy(t) lungo la direzione dei fili per mezzo di una quadratura:
y(t) = y(0) +1m
t6
0
7py ! q #(x(t))
8dt = y(0) +
py
mt ! q
m
t6
0
#(x(t))dt . (503.32)
In forza della (503.30), la forma esplicita dell’energia potenziale cui applicare l’analisi diWeierstrass risulta
W (x) =1
2m
-py +
qµ0
2"
n9
k=1
ik ln!!!x ! ak
a
!!!.2
x " R \ {a1, . . . , an} .
I valori costanti E e c, rispettivamente dell’energia meccanica H e di py lungo il moto, sonoricavati dalle condizioni iniziali x(0), x(0), y(0) mediante le formule:
E =m
27x(0)2 + y(0)2
8c = my(0) ! qµ0
2"
n9
k=1
ik ln!!!!x(0) ! ak
a
!!!! ,
mentre la condizione iniziale y(0) serve unicamente a determinare la soluzione (503.32).
Osservazione. Integrazione numerica delle equazioni del motoLe condizioni iniziali in forma adimensionale sono date da:
+(0) " R \ {!1,+1} 0(0) " R d+
d$(0) " R d0
d$(0) " R
che definiscono tramite la (503.11) il valore dell’integrale di Poisson adimensionale
c =d0
d$(0) ! G(+(0))
e dell’energia meccanica adimensionale
1 =12
$ d+
d$(0)%2
+127c + G(+(0))
82
Stefano Siboni 2645

Universita degli studi di Trento Esercizi di Meccanica razionale
dove si e fatto uso, al solito, della funzione ausiliaria (503.16):
G(+) = ln |+ + 1| + i2i1
ln |+ ! 1| + " R \ {!1,+1} .
Le equazioni adimensionalizzate del moto del sistema sono'()
(*
d2+
d$ 2= ! d
d+
-12[c + G(+)]2
.
d0
d$= c + G(+)
e si riconducono facilmente alla forma normale del primo ordine'(((((()
((((((*
d+
d$= v
d0
d$= c + G(+)
dv
d$= !
7c + G(+)
8G"(+)
(503.33)
con l’introduzione della variabile ausiliaria v. Il problema di Cauchy associato alle equazioni(503.33) si ottiene assegnando i dati iniziali
+(0) " R \ {!1,+1} 0(0) " R v(0) =d+
d$(0) " R .
Si osservi che la condizione iniziale 0(0) ha come unico e"etto quello di posizionare la traietto-ria del moto parallelamente all’asse O0 5 Oy, senza in alcun modo influenzarne l’andamentoo la forma, per cui e sempre lecito porre 0(0) = 0. Per illustrare numericamente l’andamentodelle soluzioni si considera il caso di i1 = i2 (ossia ) = 1), per il quale la funzione G(+) siriduce a
G(+) = ln |+ + 1|) + ln |+ ! 1| (503.34)
e presenta il grafico illustrato di seguito:
Stefano Siboni 2646
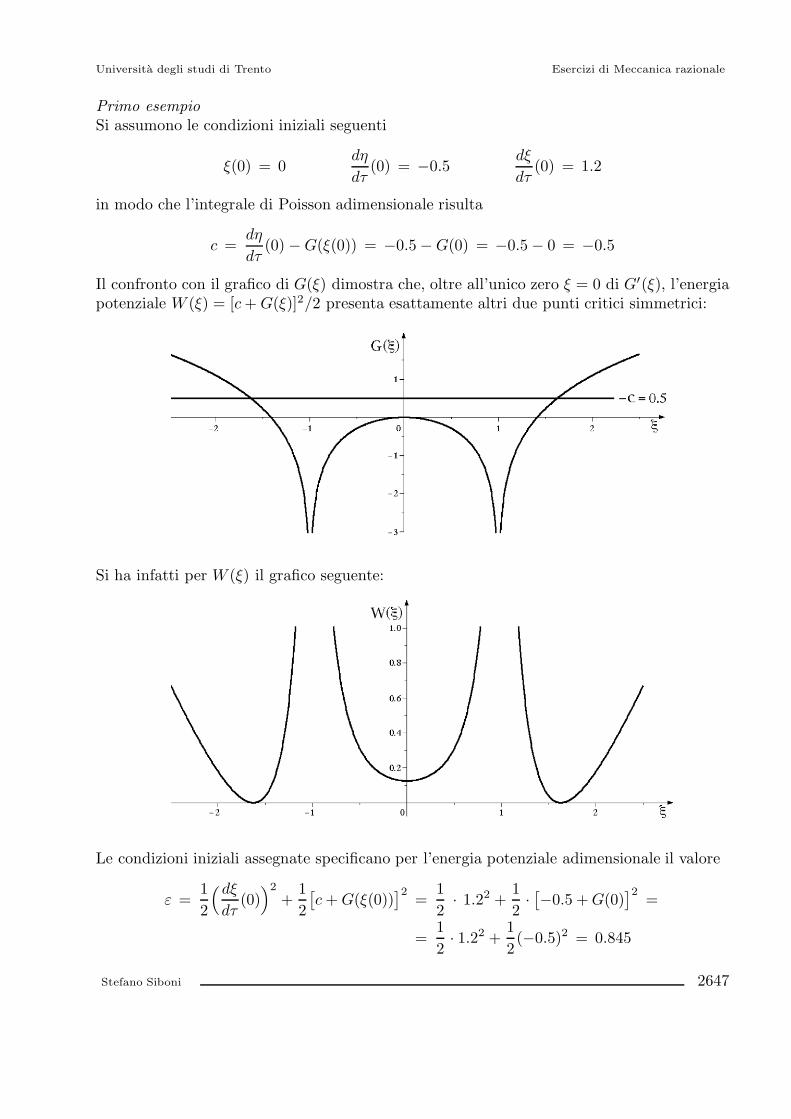
Universita degli studi di Trento Esercizi di Meccanica razionale
Primo esempioSi assumono le condizioni iniziali seguenti
+(0) = 0d0
d$(0) = !0.5
d+
d$(0) = 1.2
in modo che l’integrale di Poisson adimensionale risulta
c =d0
d$(0) ! G(+(0)) = !0.5 ! G(0) = !0.5 ! 0 = !0.5
Il confronto con il grafico di G(+) dimostra che, oltre all’unico zero + = 0 di G"(+), l’energiapotenziale W (+) = [c + G(+)]2/2 presenta esattamente altri due punti critici simmetrici:
Si ha infatti per W (+) il grafico seguente:
Le condizioni iniziali assegnate specificano per l’energia potenziale adimensionale il valore
1 =12
$d+
d$(0)%2
+127c + G(+(0))
82 =12
· 1.22 +12·7!0.5 + G(0)
82 =
=12· 1.22 +
12(!0.5)2 = 0.845
Stefano Siboni 2647

Universita degli studi di Trento Esercizi di Meccanica razionale
e grazie al dato +(0) = 0 portano a prevedere che il moto in +($ ) del punto materiale siaperiodico e abbia luogo in un intervallo simmetrico contenente l’origine + = 0. L’integrazionenumerica delle equazioni (503.33) sull’intervallo $ " [0, 8] porge infatti la seguente traiettoria:
Si osservi che il moto 0($ ) lungo la direzione dei fili e piu rapido di quello in direzioneperpendicolare +($ ), per cui la traiettoria non presenta autointersezioni.
Secondo esempioUna seconda scelta interessante delle condizioni iniziali e
+(0) = 1.7d0
d$(0) = 0.1365768291
d+
d$(0) = 1.2
e fornisce i seguenti valori delle costanti del moto:
c =d0
d$(0) !G(+(0)) = 0.1365768291! G(1.7) = 0.1365768291! 0.6365768291 = !0.5
1 =12
$ d+
d$(0)%2
+127c + G(+(0))
82 =12· 1.22 +
12
· [!0.5 + G(1.7)]2 =
=12· 1.22 +
12
· [!0.5 + 0.6365768291]2 = 0.7293266151 .
L’energia potenziale e dunque la stessa gia considerata nell’esempio precedente, mentrel’energia meccanica adimensionale risulta leggermente inferiore. L’esame del grafico di W (+),tenuto conto che +(0) > +1, mostra che il moto +($ ) deve essere periodico e ubicato in unintervallo a destra di + = +1. L’integrazione numerica del problema di Cauchy nell’interval-
Stefano Siboni 2648
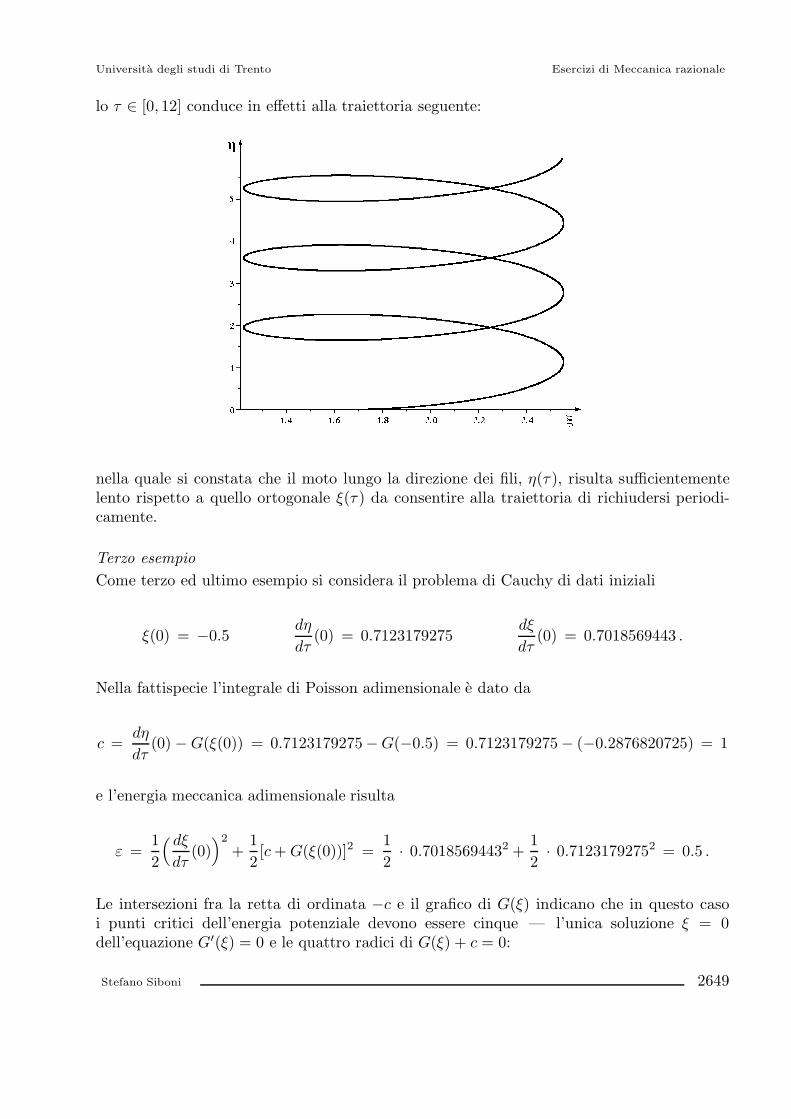
Universita degli studi di Trento Esercizi di Meccanica razionale
lo $ " [0, 12] conduce in e"etti alla traiettoria seguente:
nella quale si constata che il moto lungo la direzione dei fili, 0($ ), risulta su!cientementelento rispetto a quello ortogonale +($ ) da consentire alla traiettoria di richiudersi periodi-camente.
Terzo esempioCome terzo ed ultimo esempio si considera il problema di Cauchy di dati iniziali
+(0) = !0.5d0
d$(0) = 0.7123179275
d+
d$(0) = 0.7018569443 .
Nella fattispecie l’integrale di Poisson adimensionale e dato da
c =d0
d$(0) ! G(+(0)) = 0.7123179275!G(!0.5) = 0.7123179275! (!0.2876820725) = 1
e l’energia meccanica adimensionale risulta
1 =12
$ d+
d$(0)%2
+12[c + G(+(0))]2 =
12
· 0.70185694432 +12
· 0.71231792752 = 0.5 .
Le intersezioni fra la retta di ordinata !c e il grafico di G(+) indicano che in questo casoi punti critici dell’energia potenziale devono essere cinque — l’unica soluzione + = 0dell’equazione G"(+) = 0 e le quattro radici di G(+) + c = 0:
Stefano Siboni 2649
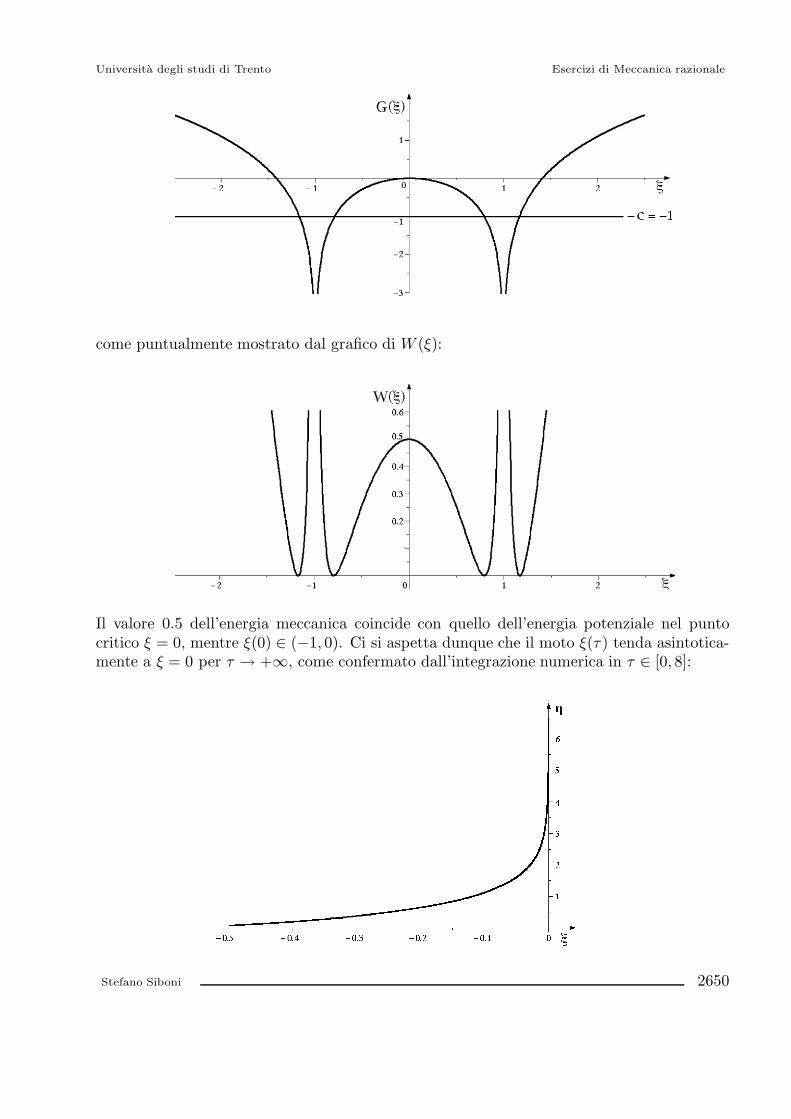
Universita degli studi di Trento Esercizi di Meccanica razionale
come puntualmente mostrato dal grafico di W (+):
Il valore 0.5 dell’energia meccanica coincide con quello dell’energia potenziale nel puntocritico + = 0, mentre +(0) " (!1, 0). Ci si aspetta dunque che il moto +($ ) tenda asintotica-mente a + = 0 per $ * +), come confermato dall’integrazione numerica in $ " [0, 8]:
Stefano Siboni 2650

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 504. Equilibrio non isolatoSi consideri l’equazione di"erenziale del primo ordine in forma normale:
x = f(x)
con x " D aperto di Rn, 0 " D ed f di classe C1 in D a valori in Rn, con f(0) = 0. Siadf(0) la matrice jacobiana di f nel punto fisso x = 0. Verificare che:
(a) per df(0) invertibile, il punto fisso x = 0 e isolato;(b) se il punto fisso x = 0 non e isolato, la matrice df(0) non puo essere invertibile, in modo
che risulta esclusa l’applicabilita del teorema di analisi lineare per dedurre la stabilitaasintotica del punto fisso x = 0.
Soluzione(a) L’invertibilita della matrice jacobiana implica che il punto fisso sia isolatoSi consideri la funzione ausiliaria G : D - Rn * Rn definita da
G(x, y) = f(x) ! y .
Tale funzione e chiaramente di classe C1 nel proprio dominio di definizione e la sua matricejacobiana rispetto alle variabili x risulta
.G
.x(x, y) = df(x) % (x, y) " D - Rn .
L’ipotesi f(0) = 0 implica che si abbia
G(0, 0) = 0
mentre la matrice jacobiana.G
.x(0, 0) = df(0)
e invertibile in virtu della condizione su df(0). Ricorrono allora le condizioni per poterapplicare il teorema di Dini delle funzioni implicite, il quale assicura l’esistenza di un intornoA 9 D di x = 0 e di un intorno B 9 Rn di y = 0 tali che in A - B l’equazione
G(x, y) = 0
definisce il vettore x come funzione C1 di y " B a valori in A. Ne deriva che per y = 0l’unica soluzione dell’equazione G(x, y) = 0 in x " A e quindi x = 0:
G(x, 0) = 0 , x " A, =+ x = 0 .
In definitiva, %x " A \ {0} risulta f(x) &= 0; vale a dire che nell’intorno A, x = 0 costituiscel’unico punto fisso dell’equazione x = f(x).
Stefano Siboni 2651
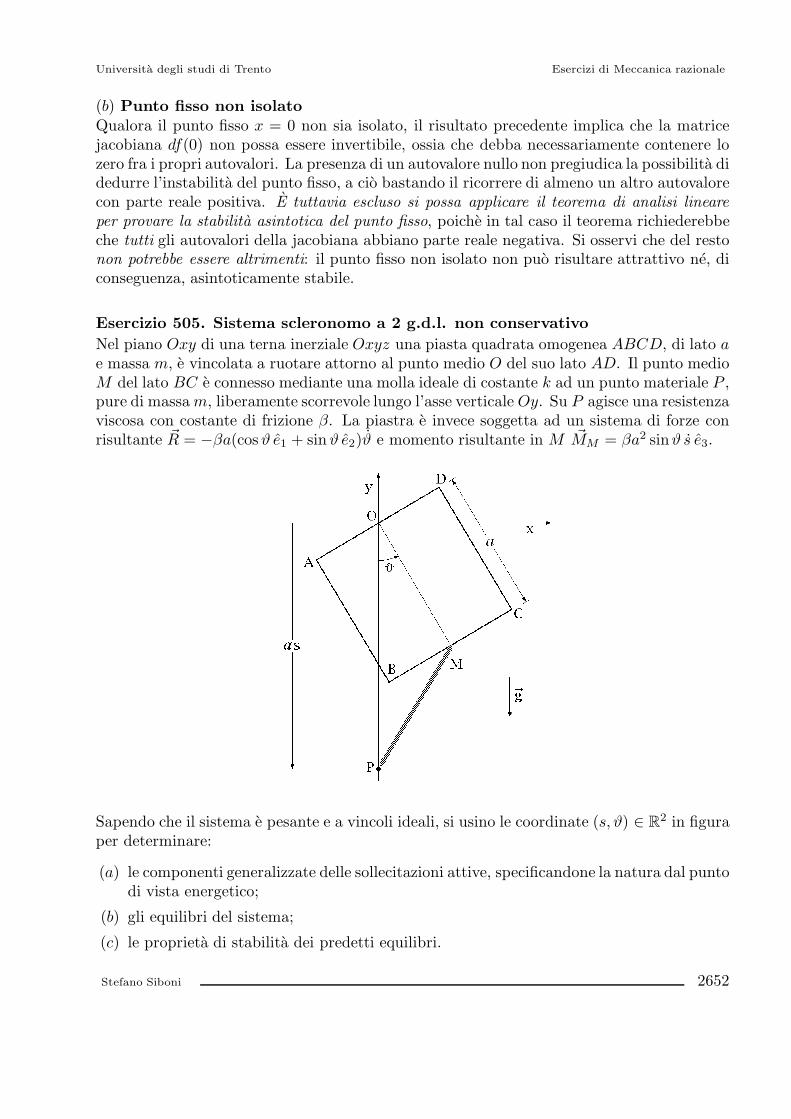
Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Punto fisso non isolatoQualora il punto fisso x = 0 non sia isolato, il risultato precedente implica che la matricejacobiana df(0) non possa essere invertibile, ossia che debba necessariamente contenere lozero fra i propri autovalori. La presenza di un autovalore nullo non pregiudica la possibilita didedurre l’instabilita del punto fisso, a cio bastando il ricorrere di almeno un altro autovalorecon parte reale positiva. E tuttavia escluso si possa applicare il teorema di analisi lineareper provare la stabilita asintotica del punto fisso, poiche in tal caso il teorema richiederebbeche tutti gli autovalori della jacobiana abbiano parte reale negativa. Si osservi che del restonon potrebbe essere altrimenti: il punto fisso non isolato non puo risultare attrattivo ne, diconseguenza, asintoticamente stabile.
Esercizio 505. Sistema scleronomo a 2 g.d.l. non conservativoNel piano Oxy di una terna inerziale Oxyz una piasta quadrata omogenea ABCD, di lato ae massa m, e vincolata a ruotare attorno al punto medio O del suo lato AD. Il punto medioM del lato BC e connesso mediante una molla ideale di costante k ad un punto materiale P ,pure di massa m, liberamente scorrevole lungo l’asse verticale Oy. Su P agisce una resistenzaviscosa con costante di frizione (. La piastra e invece soggetta ad un sistema di forze conrisultante *R = !(a(cos 2 e1 + sin 2 e2)2 e momento risultante in M *MM = (a2 sin2 s e3.
Sapendo che il sistema e pesante e a vincoli ideali, si usino le coordinate (s,2) " R2 in figuraper determinare:
(a) le componenti generalizzate delle sollecitazioni attive, specificandone la natura dal puntodi vista energetico;
(b) gli equilibri del sistema;
(c) le proprieta di stabilita dei predetti equilibri.
Stefano Siboni 2652

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Componenti generalizzate delle forze attiveLe sollecitazioni attive che agiscono sul sistema sono le seguenti:! il peso;! l’interazione elastica fra i punti M e P ;! la resistenza viscosa su P ;! il sistema di forze agente sulla piastra, con risultante *R e momento risultante in M ,
*MM , noti. Tale sistema verra indicato con S.Tutte le sollecitazioni danno il loro contributo alle forze generalizzate Qs e Q& del sistema.
Forze pesoIl sistema delle forze peso e posizionale e conservativo ed ammette quindi l’appropriatopotenziale. Il baricentro della piastra omogenea coincide con il centro geometrico (e disimmetria) di questa, per cui viene identificato dal vettore posizione (M!O)/2. Il potenzialegravitazionale del sistema risulta pertanto
Ug = !mg e2 ·M ! O
2! mg e2 · (P ! O)
essendoM ! O = a sin 2 e1 ! a cos 2 e2 e P ! O = !as e2 (505.1)
per cui
Ug =12mga cos 2 + mgas . (505.2)
Forze elasticheAll’interazione elastica fra i punti M e P e associato il potenziale
Uel = !k
2|M ! P |2
doveM ! P = a sin 2 e1 + a(s ! cos 2) e2 (505.3)
e quindi
Uel = !ka2
2(sin22 + s2 ! 2s cos 2 + cos22) = !ka2
2(s2 ! 2s cos 2 + 1) . (505.4)
Resistenza viscosa in PDal vettore posizione P ! O = !as e2 si deduce l’espressione della velocita istantanea
P = !as e2
in modo che la resistenza viscosa su P assume la forma
*FP = !(P = !((!as e2) = (as e2 .
Stefano Siboni 2653

Universita degli studi di Trento Esercizi di Meccanica razionale
Dalle derivate parziali di P ! O:
.P
.s= !a e2
.P
.2= 0
si deducono allora le componenti generalizzate di *FP :
Qvs = !(P · .P
.s= (as e2 · (!a e2) = !(a2s
Qv& = !(P · .P
.2= 0 .
Sistema di forze agente sulla piastraDel sistema di forze S sono noti il risultante ed il momento risultante rispetto al punto Mdella piastra. Quest’ultima si muove di moto piano e le sue rotazioni possono essere descritteper mezzo dell’angolo 2, che e infatti compreso fra una direzione fissa rispetto al riferimentoassoluto — la verticale per O condotta verso il basso — e una direzione solidale alla piastra— quella del vettore M!O. Le componenti generalizzate di S sono date percio dalle formule
QSs =
.M
.s· *R +
.2
.se3 · *MM =
.M
.s· *R
QS& =
.M
.2· *R +
.2
.2e3 · *MM =
.M
.2· *R + e3 · *MM
che sostituendo le espressioni esplicite di M !O, *R e *MM diventano:
QSs = 0 · *R = 0
QS& =
.
.2(a sin 2 e1 ! a cos 2 e2) · [!(a(cos 2 e1 + sin 2 e2)2] + e3 · (a2 sin2 s e3 =
= (a cos 2 e1 + a sin 2 e2) · [!(a(cos 2 e1 + sin2 e2)2] + (a2 sin2 s =
= !(a22 + (a2 sin2 s .
Componenti generalizzate delle sollecitazioni attiveLe componenti generalizzate delle sollecitazioni si ricavano sommando i contributi corrispon-denti di tutte le forze e risultano pertanto:
Qs =.
.s(Ug + Uel) + Qv
s + QSs =
.U
.s+ Ds
Q& =.
.2(Ug + Uel) + Qv
& + QS& =
.U
.2+ D&
dove si sono introdotti il potenziale del sistema:
U = Ug + Uel =12mga cos 2 + mgas ! ka2
2(s2 ! 2s cos 2) (505.5)
Stefano Siboni 2654

Universita degli studi di Trento Esercizi di Meccanica razionale
e le componenti generalizzate delle sollecitazioni non posizionali:
Ds = Qvs + QS
s = !(a2s + 0 = !(a2s
D& = Qv& + QS
& = 0 ! (a22 + (a2 sin2 s = !(a22 + (a2 sin2 s .(505.6)
Queste ultime sono in e"etti sollecitazioni completamente dissipative. La loro potenza siscrive infatti come una forma quadratica delle velocita generalizzate:
"D = Dss + D& 2 = !(a2s2 + (!(a22 + (a2 sin2 s)2 =
= !(a2(s2 + 22 ! sin2 s2) = (s 2))(2)+
s2
,
la cui matrice di rappresentazione vale
)(2) = !(a2
/
11 !1
2sin 2
!12
sin2 1
2
4
e presenta traccia negativatr)(2) = !2(a2 < 0
e determinante positivo
det)(2) = (2a4
-1 !
$!1
2sin2
%2.
= (2a4
-1 ! 1
4sin22
.( 3
4(2a4 > 0
per qualsiasi valore di 2, risultando cosı definita negativa. Ne deriva che
"D ' 0 % (s,2, s, 2) " R4
e che"D = 0 1+ (s, 2) = (0, 0) .
(b) EquilibriLe sollecitazioni dissipative non hanno e"etto alcuno sugli equilibri e possono essere ignoratenella determinazione di questi. Le configurazioni di equilibrio si identificano percio con tuttie soli i punti critici del potenziale (505.5), dove si annullano simultaneamente le componentidel gradiente
.U
.s(s,2) = mga ! ka2s + ka2 cos 2
.U
.2(s,2) = !1
2mga sin 2 ! ka2s sin 2 .
Le equazioni di equilibrio sono cosı'()
(*
mg
ka! s + cos 2 = 0
sin2$1
2mg
ka+ s
%= 0
(505.7)
Stefano Siboni 2655

Universita degli studi di Trento Esercizi di Meccanica razionale
la seconda delle quali e soddisfatta per sin2 = 0 oppure per (mg/2ka) + s = 0. Puo aversidunque 2 = 0, 2 = ", s = !mg/2ka. Esaminiamo le tre possibilita.
! Se 2 = 0 la prima equazione di equilibrio (505.7) diventa
mg
ka! s + 1 = 0
e conduce as =
mg
ka+ 1
ovvero alla configurazione di equilibrio
(s,2) =$mg
ka+ 1, 0
%.
! Per 2 = " dalla prima equazione (505.7) risulta
mg
ka! s ! 1 = 0
e quindis =
mg
ka! 1
in modo che la corrispondente configurazione di equilibrio assume la forma
(s,2) =$mg
ka! 1,"
%.
! Se s = !mg/2ka si ottiene infine
mg
ka+
12
mg
ka+ cos 2 = 0
ossiacos 2 = !3
2mg
ka,
equazione che porge le due radici
2 = arccos$!3
2mg
ka
%:= 2) " ("/2,")
2 = !arccos$!3
2mg
ka
%= !2) " (!",!"/2)
definite e distinte dalle precedenti a condizione che si abbia 3mg/2ka < 1. Gli equilibriassociati sono pertanto:
(s,2) =$!1
2mg
ka,2)
%e (s,2) =
$!1
2mg
ka,!2)
%
definiti per 3mg/2ka < 1.
Stefano Siboni 2656

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Stabilita degli equilibriLe sollecitazioni applicate al sistema sono in parte posizionali conservative e in parte comple-tamente dissipative. Gli equilibri sono inoltre tutti isolati, dal momento che il loro numerorisulta finito. E quindi possibile caratterizzare completamente le proprieta di stabilita degliequilibri facendo uso della forma forte del teorema di Lagrange-Dirichlet, basata sui criteri diBarbasin-Krasovskii. I massimi relativi propri del potenziale sono equilibri asintoticamentestabili, mentre si ha instabilita in ogni altro caso. Il primo passo, al solito, e il calcolo dellederivate parziali seconde del potenziale
.2U
.s2(s,2) = !ka2 .2U
.2.s(s,2) = !ka2 sin 2
.2U
.s.2(s,2) = !ka2 sin 2
.2U
.22(s,2) = !1
2mga cos 2 ! ka2s cos 2
dalle quali si deduce la matrice hessiana di U in ciascuna configurazione di equilibrio delsistema.
Configurazione (s,2) =$mg
ka+ 1, 0
%
La matrice hessiana del potenziale in questa configurazione assume la forma diagonale
HU
$mg
ka+ 1, 0
%=
F!ka2 0
0 !12mga ! ka2
$1 +
mg
ka
%G
dalla quale e evidente che entrambi gli autovalori sono di segno negativo, per cui la matricerisulta definita negativa. Ne segue che l’equilibrio costituisce un massimo relativo propriodel potenziale, la cui stabilita asintotica e assicurata dai criteri di Barbasin-Krasovskii.
Configurazione (s,2) =$mg
ka! 1,"
%
In questo caso la derivata seconda del potenziale rispetto a 2 si riduce a
.2U
.22
$mg
ka! 1,"
%=
12mga + ka2
$mg
ka! 1
%= ka2
$12
mg
ka+
mg
ka! 1
%= ka2
$32
mg
ka! 1
%
e la matrice hessiana del potenziale diventa percio
HU
$mg
ka! 1,"
%=
/
1!ka2 0
0 ka2$3
2mg
ka! 1
%
2
4.
Il primo autovalore — !ka2 — ha sempre segno negativo. La natura dell’equilibrio dipendequindi esclusivamente dal segno della derivata seconda in 2, che rappresenta il secondoautovalore della matrice. Si devono discutere tre casi:
! se 3mg/2ka < 1 la derivata .2U/.22 assume segno negativo e la matrice hessiana risultadefinita negativa. L’equilibrio e quindi asintoticamente stabile quale massimo relativoproprio del potenziale;
Stefano Siboni 2657

Universita degli studi di Trento Esercizi di Meccanica razionale
! per 3mg/2ka > 1 la derivata seconda .2U/.22 e positiva, escludendo cosı che la confi-gurazione di equilibrio possa costituire un massimo relativo proprio del potenziale. Ciobasta ad assicurare l’instabilita dell’equilibrio per i criteri di Barbasin-Krasovskii;
! se infine 3mg/2ka = 1, la derivata seconda si annulla e la matrice hessiana risultasemidefinita non definita negativa. Questa circostanza non e su!ciente ad a"ermareche l’equilibrio sia un massimo relativo proprio, ma neppure lo esclude. In e"etti il puntonon e ne un massimo ne un minimo. Per verificarlo si considera la forma adimensiona-lizzata del potenziale
1ka2
U(s,2) =12
mg
kacos 2 +
mg
kas ! s2
2+ s cos 2
e si impone la condizione mg/ka = 2/3:
1ka2
U(s,2) =13
cos 2 +23s ! s2
2+ s cos 2 .
Per evidenziare le variazioni dei parametri lagrangiani rispetto ai valori di equilibrio siintroduce il cambiamento di variabili (s,2) * (3s, 32) definito da
s =mg
ka! 1 + 3s =
23! 1 + 3s = !1
3+ 3s 2 = " + 32
che consente di riscrivere l’espressione nella forma:
1ka2
U$!1
3+ 3s," + 32
%=
=13
cos(" + 32) +23
$!1
3+ 3s
%! 1
2
$!1
3+ 3s
%2+$!1
3+ 3s
%cos(" + 32) =
= !13
cos 32 ! 29
+233s ! 1
18! 1
23s2 +
133s +
13
cos 32 ! 3s cos 32 =
= ! 518
! 123s2 + 3s ! 3s cos 32 = ! 5
18! 1
23s2 + 2 3s sin2
$32
2
%. (505.8)
Conviene ricorrere ad una rappresentazione matriciale del risultato ottenuto
1ka2
U$!1
3+ 3s," + 32
%= ! 5
18+$3s sin2
$32
2
%%+!1/2 11 0
,/
13s
sin2$32
2
%
2
4
in quanto la matrice simmetrica +!1/2 1
1 0
,
ha determinante negativo ed e quindi indefinita, con un autovalore positivo ed unonegativo. Ne segue che se (3s, sin2(32/2)) e un autovettore associato all’autovalorepositivo dovra aversi
1ka2
U$!1
3+ 3s," + 32
%> ! 5
18=
1ka2
U$!1
3,"%
Stefano Siboni 2658

Universita degli studi di Trento Esercizi di Meccanica razionale
mentre qualora si tratti di un autovettore relativo all’autovalore negativo risultera
1ka2
U$!1
3+ 3s," + 32
%< ! 5
18=
1ka2
U$!1
3,"%
.
Piu precisamente, gli autovalori sono le soluzioni dell’equazione caratteristica
det+!1/2 ! , 1
1 !,
,= 0
ossia dell’equazione di secondo grado
,2 +12, ! 1 = 0
che porge le radici
,± =12
$!1
2±"
14
+ 4%
=!1 ±
$17
4.
Gli autovettori associati a ,+ = (!1 +$
17)/4 sono determinati dal sistema lineareomogeneo +
!1/2! ,+ 11 !,+
,+a1
b1
,= 0
+a1
b1
,&= 0
vale a dire '()
(*
$!1
4! 1
4$
17%a1 + b1 = 0
a1 +$1
4! 1
4$
17%b1 = 0
da cui segue l’insieme di soluzioni non banali
a1 =$
17 ! 14
b1 , % b1 " R \ {0} .
La funzione (505.8) cresce quindi rispetto al valore di equilibrio !5/18 se
3s =$
17 ! 14
sin2$32
2
%
per ogni 32 &= 0 abbastanza piccolo in valore assoluto. In modo analogo si verifica cheall’autovalore negativo ,! = (!1 !
$17)/4 corrispondono autovettori del tipo (a2, b2),
con
a2 =!$
17 ! 14
b2 , % b2 " R \ {0}
in modo che la (505.8) assume valori minori di !5/18 per
3s = !$
17 + 14
sin2$32
2
%
Stefano Siboni 2659

Universita degli studi di Trento Esercizi di Meccanica razionale
con qualsiasi 32 &= 0 su!cientemente vicino a 0. A riprova del risultato, la figuraseguente mostra il grafico di U/ka2 nell’intorno di (3s, 32) = (0, 0):
che ha infatti un andamento “a sella”. Dal momento che la configurazione non e unmassimo relativo proprio del potenziale, essa risulta instabile per i criteri di Barbasin-Krasovskii.
Configurazione (s,2) = (!mg/2ka,2))
Per questa configurazione la matrice hessiana del potenziale vale
HU
$! mg
2ka,2)
%=
/
1!ka2 ! ka2 sin2)
!ka2 sin2) !12mga cos 2) ! ka2
$! mg
2ka
%cos 2)
2
4 =
= ka2
F!1 ! sin 2)
! sin 2) 0
G
ed ha determinante negativo
detHU
$! mg
2ka,2)
%= !k2a4sin22) < 0
risultando percio indefinita. Questa condizione esclude che la configurazione sia un massimorelativo proprio del potenziale. L’equilibrio e instabile per i criteri di Barbasin-Krasovskii.
Stefano Siboni 2660

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (s,2) = (!mg/2ka,!2))Nella fattispecie l’hessiana del potenziale diventa
HU
$! mg
2ka,!2)
%= ka2
F!1 sin 2)
sin2) 0
G
ed e ancora indefinita, come nel caso precedente. Cio basta ad escludere che l’equilibrio siaun massimo relativo proprio del potenziale e a concludere, per Barbasin-Krasovksii, che sitratti di un equilibrio instabile.
Osservazione. Condizione dei vincoli idealiPer questo sistema e possibile o"rire una interpretazione molto semplice della condizione deivincoli ideali. Il generico atto di moto virtuale del sistema in una configurazione assegnata(s,2) si ottiene specificando la velocita istantanea del punto P e di qualsiasi punto Q dellapiastra ABCD. Per il punto P si ha
*6P = !a'se2 %'s " R
mentre per un qualsiasi Q " ABCD vale
*6Q = '& e3 # (Q ! O) %'& " R
in modo che la potenza virtuale delle reazioni vincolari agenti sul sistema diventa
9
Pi
*6i · *$i = !a's e2 · *$P + '&
9
Q&ABCD
e3 # (Q ! O) · *$Q =
= !'s a e2 · *$P + '&e3 ·9
Q&ABCD
(Q ! O) # *$Q = !'s a e2 · *$P + '&e3 · *M/O
ed il suo annullarsi per qualsiasi 's,'& " R impone che si abbia
e2 · *$P = 0 e3 · *M/O = 0
Il sistema risulta quindi a vincoli ideali se e soltanto se:(i) P si muove senza attrito lungo l’asse Oy, e
(ii) la piastra ABCD presenta un asse fisso Ox privo di attrito.
Osservazione. Equilibri con le equazioni cardinali della staticaSfruttando la caratterizzazione dei vincoli ideali, proviamo a rideterminare le equazionidi equilibrio (505.7) mediante le equazioni cardinali della statica. Le reazioni vincolaricompatibili con la condizione dei vincoli ideali sono tutte e sole quelle che soddisfano leequazioni
e2 · *$P = 0 e3 · *M/O = 0.
Stefano Siboni 2661

Universita degli studi di Trento Esercizi di Meccanica razionale
Al fine di ottenere equazioni pure di equilibrio si dovranno percio scrivere la prima equazionecardinale della statica per il punto P e la seconda equazione cardinale rispetto al momentoO per la piastra. In condizioni statiche le forze dissipative Ds e D& si annullano e sonopercio del tutto irrievanti per la realizzazione degli equilibri.
Prima equazione cardinale della statica per il punto PSi proietta lungo e2 la somma delle forze agenti sul punto P
7!mg e2 + k(M ! P ) + *$P
8· e2 = 0
e usando la relazione (505.3) si ottiene
!mg + ka(s ! cos 2) + 0 = 0
che coincide con la prima delle (505.7).
Seconda equazione cardinale statica in O per la piastraConsiderando la componente lungo e3 della seconda equazione cardinale della piastra rispettoall’asse Oy, si ha
7(G ! O) # (!mg e2) + (M ! O) # [k(P ! M)] + *M/
O
8· e3 = 0
ossia -M !O
2# (!mg e2) + (M ! O) # [k(P ! O)] + *M/
O
.· e3 = 0
e ancora
a
2(sin 2 e1 ! cos 2 e2) # (!mg e2) · e3 + a(sin 2 e1 ! cos 2 e2) # (!kas) e2 · e3 + e3 · *M/
O = 0
per cui
!12mga sin2 ! ka2s sin 2 = 0 .
Quest’ultima relazione equivale alla seconda delle equazioni di equilibrio (505.7).
Esercizio 506. Piccole oscillazioniUn sistema scleronomo posizionale conservativo e governato dalla lagrangiana
L =mR2
2
$s2 + cos / s/ +
13/2%
+ mgR$cos / ! s2
2
%,
dove (s,/) " R2 sono le coordinate generalizzate e m,R, g delle costanti positive — unamassa, una lunghezza e l’accelerazione di gravita. Determinare, nell’intorno dell’equilibriostabile (s,/) = (0, 0):
(a) le equazioni delle piccole oscillazioni;
Stefano Siboni 2662

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) le frequenze normali delle piccole oscillazioni;(c) l’espressione dei modi normali di oscillazione, distinguendo il modo “basso” e quello
“alto”.
SoluzioneLa lagrangiana del sistema e
L =mR2
2
$s2 + cos / s/ +
13/2%
+ mgR$cos / ! s2
2
%
e poiche essa descrive un sistema scleronomo l’energia cinetica deve identificarsi con lafunzione quadratica delle velocita generalizzate:
T =mR2
2
$s2 + cos / s/ +
13/2%
mentre il termine residuo rappresenta il potenziale:
U(s,/) = mgR$cos / ! s2
2
%.
La matrice A di rappresentazione dell’energia cinetica e definita da
T =12(s /)A
+s/
,
e si scrive percio
A = mR2
/
11
12
cos /
12
cos /13
2
4 = A(/) .
Per le derivate parziali prime del potenziale U si hanno le espressioni:
.U
.s= !mgRs
.U
./= !mgR sin /
e le derivate seconde risultano:
.2U
.s2= !mgR
.2U
./.s=
.2U
.s./= 0
.2U
./2= !mgR cos /
in modo che la matrice hessiana di U assume la forma
HU (s,/) =+!mgR 0
0 !mgR cos /
,.
Appare evidente che gli equilibri del sistema ricorrono per (s,/) = (0, 0) e per (s,/) = (0,"),e che soltanto il primo e stabile, dal momento che HU (0, 0) risulta definita negativa.
Stefano Siboni 2663

Universita degli studi di Trento Esercizi di Meccanica razionale
(a) Equazioni delle piccole oscillazioniLe matrici A(/) e HU (s,/) devono essere calcolate in (s,/) = (0, 0):
A(0) = mR2
+1 1/2
1/2 1/3
,HU (0, 0) =
+!mgR 0
0 !mgR
,.
Le equazioni delle piccole oscillazioni nell’intorno di (s,/) = (0, 0) diventano allora
A(0)+
3s3/
,!HU (0, 0)
+3s3/
,= 0
ossiamR2
+1 1/2
1/2 1/3
,+3s3/
,!+!mgR 0
0 !mgR
,+3s3/
,= 0
e quindi, eseguiti i prodotti e separate le componenti,'()
(*
mR2$3s +
123/%
+ mgR 3s = 0
mR2$1
23s +
133/%
+ mgR 3/ = 0
valide per (s,/) = (3s, 3/) su!cientemente prossimi a (0, 0).
(b) Frequenze normaliLe pulsazioni normali delle piccole oscillazioni sono determinate dalle soluzioni positive in# dell’equazione caratteristica:
det7#2A(0) + HU (0, 0)
8= 0
vale a dire di
det
/
1mR2#2 ! mgR
12mR2#2
12mR2#2 1
3mR2#2 ! mgR
2
4 = 0
che raccogliendo il fattore mR2 da tutti gli elementi di matrice diventa
det
/
1#2 ! g
R
12#2
12#2 1
3#2 ! g
R
2
4 = 0
e dunque $#2 ! g
R
%$13#2 ! g
R
%! 1
4#4 = 0
ossia#4 ! 16
g
R#2 + 12
g2
R2= 0 .
Stefano Siboni 2664

Universita degli studi di Trento Esercizi di Meccanica razionale
Le radici in #2 dell’equazione sono
#2 =12
-16
g
R±"
256g2
R2! 4 · 12
g2
R2
.= (8 ± 2
$13)
g
R
e porgono le pulsazioni normali
#1 =O
8 ! 2$
13"
g
R#2 =
O8 + 2
$13"
g
R
con #1 < #2. Le frequenze dei modi normali di oscillazione sono pertanto:
f1 =#1
2"=
12"
O8 ! 2
$13"
g
R
f2 =#2
2"=
12"
O8 + 2
$13"
g
R.
(c) Modi normaliI modi normali delle piccole oscillazioni sono della forma
+3s3/
,=+
ai
bi
,cos(#it + 'i)
con le fasi 'i " R arbitrarie e i vettori delle ampiezze determinati dal problema agli autovalorigeneralizzato
7#2A(0) + HU (0, 0)
8 + ai
bi
,= 0 ,
+ai
bi
,&=+
00
,. (506.1)
I modi normali si distinguono in “basso” e “alto”, secondo il valore della relativa pulsazionenormale — il modo basso corrisponde alla pulsazione minore, mentre il modo alto e associatoalla pulsazione maggiore.
Modo bassoPer # = #1 il problema agli autovalori (506.1) si riduce a
/
1#2
1 ! g
R
12#2
1
12#2
113#2
1 ! g
R
2
4
/
1a1
b1
2
4 =
/
10
0
2
4
con (a1, b1) &= (0, 0). Si ha percio il sistema lineare omogeneo'(()
((*
(7 ! 2$
13)g
Ra1 + (4 !
$13)
g
Rb1 = 0
(4 !$
13)g
Ra1 +
$83! 2
3$
2 ! 1% g
Rb1 = 0
Stefano Siboni 2665

Universita degli studi di Trento Esercizi di Meccanica razionale
ovvero '(()
((*
(7 ! 2$
13)a1 + (4 !$
13) b1 = 0
(4 !$
13)a1 +$5
3! 2
3$
2%b1 = 0 .
(506.2)
Dalla prima delle equazioni (506.2) si ricava
b1
a1= !7 ! 2
$13
4 !$
13= ! (7 ! 2
$13)(4 +
$13)
16 ! 13=
!2 +$
133
,
lo stesso risultato che si trae dalla seconda
b1
a1= !3
4 !$
135! 2
$13
= !3(4 !
$13)(5 + 2
$13
25 ! 52=
!2 +$
133
.
Pertanto b1 = a1($
13!2)/3, e posto a1 = 3A1 il modo normale di oscillazione puo scriversi:+
3s3/
,= A1
+3$
13 ! 2
,cos+O
8 ! 2$
13"
g
Rt + '1
,% t " R .
con A1 > 0 e '1 " R costanti assegnate a piacere.
Modo altoIl vettore delle ampiezze per il secondo modo normale di oscillazione — # = #2 — vienedeterminato risolvendo il sistema
/
1#2
2 ! g
R
12#2
2
12#2
213#2
2 ! g
R
2
4
/
1a2
b2
2
4 =
/
10
0
2
4
rispetto a (a2, b2) &= (0, 0). Sostituendo l’espressione di #2 si ottiene il sistema lineareomogeneo '
(()
((*
(8 + 2$
13 ! 1)g
Ra2 +
12(8 + 2
$13)
g
Rb2 = 0
12(8 + 2
$13)
g
Ra2 +
$83
+23$
13 ! 1% g
Rb2 = 0
od anche '(()
((*
(7 + 2$
13)a2 + (4 +$
13) b2 = 0
(4 +$
13)a2 +5 + 2
$13
3b2 = 0 .
Le equazioni ottenute coincidono con le (506.2) salvo che per la sostituzione$
13!!*!$
13.La soluzione deve quindi essere ottenibile dalla precedente tramite la stessa sostituzione:
b2 =!$
13 ! 23
a2 = !$
13 + 23
a2 .
Stefano Siboni 2666
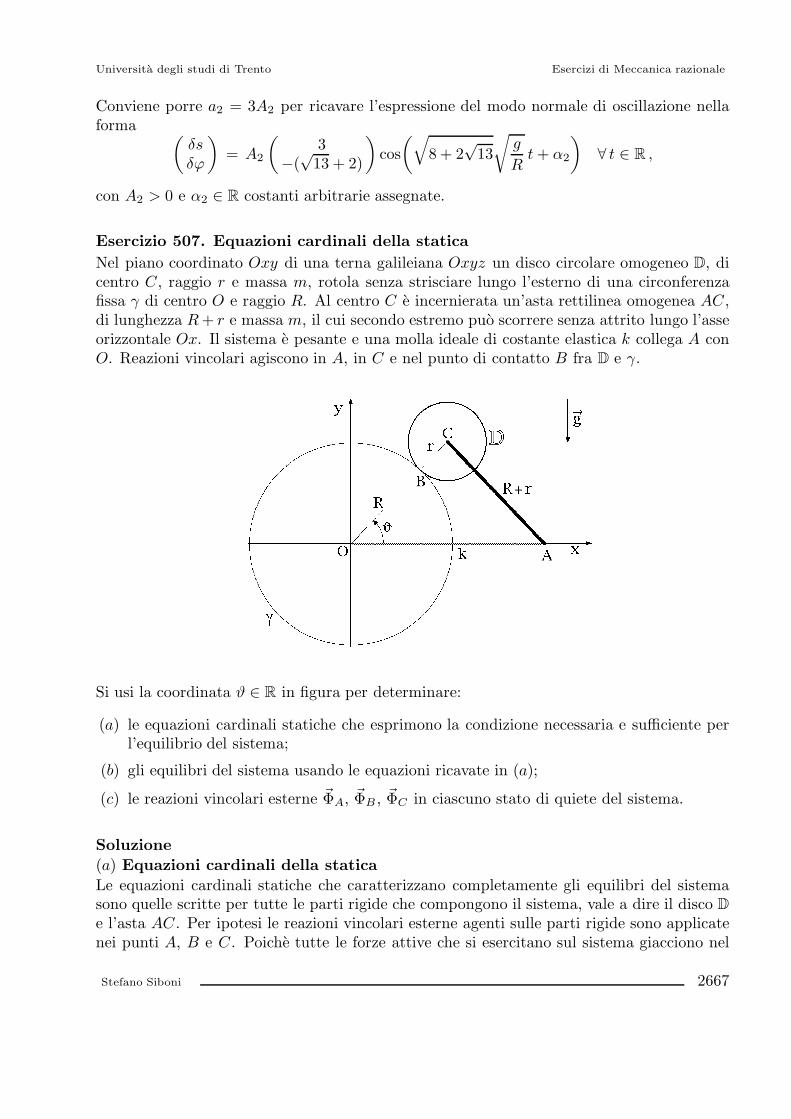
Universita degli studi di Trento Esercizi di Meccanica razionale
Conviene porre a2 = 3A2 per ricavare l’espressione del modo normale di oscillazione nellaforma +
3s3/
,= A2
+3
!($
13 + 2)
,cos
+O8 + 2
$13"
g
Rt + '2
,% t " R ,
con A2 > 0 e '2 " R costanti arbitrarie assegnate.
Esercizio 507. Equazioni cardinali della staticaNel piano coordinato Oxy di una terna galileiana Oxyz un disco circolare omogeneo D, dicentro C , raggio r e massa m, rotola senza strisciare lungo l’esterno di una circonferenzafissa ) di centro O e raggio R. Al centro C e incernierata un’asta rettilinea omogenea AC ,di lunghezza R + r e massa m, il cui secondo estremo puo scorrere senza attrito lungo l’asseorizzontale Ox. Il sistema e pesante e una molla ideale di costante elastica k collega A conO. Reazioni vincolari agiscono in A, in C e nel punto di contatto B fra D e ).
Si usi la coordinata 2 " R in figura per determinare:
(a) le equazioni cardinali statiche che esprimono la condizione necessaria e su!ciente perl’equilibrio del sistema;
(b) gli equilibri del sistema usando le equazioni ricavate in (a);
(c) le reazioni vincolari esterne *$A, *$B , *$C in ciascuno stato di quiete del sistema.
Soluzione(a) Equazioni cardinali della staticaLe equazioni cardinali statiche che caratterizzano completamente gli equilibri del sistemasono quelle scritte per tutte le parti rigide che compongono il sistema, vale a dire il disco De l’asta AC . Per ipotesi le reazioni vincolari esterne agenti sulle parti rigide sono applicatenei punti A, B e C . Poiche tutte le forze attive che si esercitano sul sistema giacciono nel
Stefano Siboni 2667
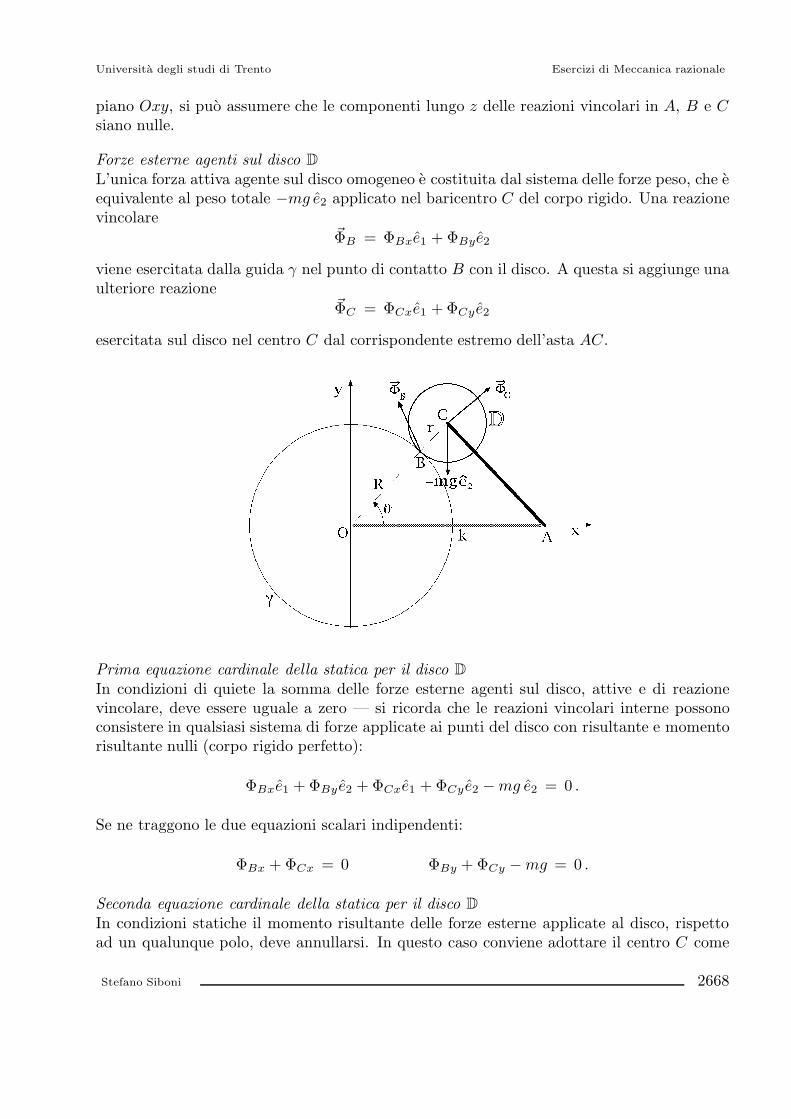
Universita degli studi di Trento Esercizi di Meccanica razionale
piano Oxy, si puo assumere che le componenti lungo z delle reazioni vincolari in A, B e Csiano nulle.
Forze esterne agenti sul disco DL’unica forza attiva agente sul disco omogeneo e costituita dal sistema delle forze peso, che eequivalente al peso totale !mg e2 applicato nel baricentro C del corpo rigido. Una reazionevincolare
*$B = $Bxe1 + $Bye2
viene esercitata dalla guida ) nel punto di contatto B con il disco. A questa si aggiunge unaulteriore reazione
*$C = $Cxe1 + $Cy e2
esercitata sul disco nel centro C dal corrispondente estremo dell’asta AC .
Prima equazione cardinale della statica per il disco DIn condizioni di quiete la somma delle forze esterne agenti sul disco, attive e di reazionevincolare, deve essere uguale a zero — si ricorda che le reazioni vincolari interne possonoconsistere in qualsiasi sistema di forze applicate ai punti del disco con risultante e momentorisultante nulli (corpo rigido perfetto):
$Bxe1 + $By e2 + $Cxe1 + $Cy e2 ! mg e2 = 0 .
Se ne traggono le due equazioni scalari indipendenti:
$Bx + $Cx = 0 $By + $Cy ! mg = 0 .
Seconda equazione cardinale della statica per il disco DIn condizioni statiche il momento risultante delle forze esterne applicate al disco, rispettoad un qualunque polo, deve annullarsi. In questo caso conviene adottare il centro C come
Stefano Siboni 2668

Universita degli studi di Trento Esercizi di Meccanica razionale
polo, dal momento che cio consente di eliminare i contributi della forza peso e della reazione*$C . Si ha pertanto l’equazione:
(B ! C) # *$B + (C ! C)# (*$C ! mg e2) = 0
che si riduce a(B !C) # *$B = 0
e sostituendo l’espressione esplicita del vettore B ! C diventa
r(! cos 2 e1 ! sin2 e2) # ($Bxe1 + $Bye2) = 0
ossiar(! cos 2$By + sin 2$Bx) e3 = 0 .
La seconda equazione cardinale della statica per il disco conduce pertanto all’unica con-dizione
sin 2$Bx ! cos 2$By = 0 .
Forze esterne agenti sull’asta ACL’asta omogenea AC e sottoposta alla forza elastica !k(A!O) nell’estremo A e al sistemadelle forze peso, equivalente al peso totale !mg e2 applicato nel punto medio G del segmentoAC . La reazione vincolare in A assume la forma
$Ay e2
in quanto, per ipotesi, lo scorrimento di A lungo l’asse Ox avviene senza attrito. Il principiodi azione e reazione impone infine che in C il disco eserciti sull’asta una reazione vincolare!*$C , l’opposto della reazione *$C che AC esercita su D.
Stefano Siboni 2669

Universita degli studi di Trento Esercizi di Meccanica razionale
Prima equazione cardinale della statica per l’asta ACLa prima equazione cardinale statica per l’asta richiede che si annulli il risultante di tuttele forze esterne applicate:
!*$C !mg e2 + $Ay e2 ! k(A ! O) = 0
vale a dire, osservato che A ! O = 2|A !C | cos 2 e1 = 2(R + r) cos 2 e1 ,
!$Cx e1 ! $Cy e2 ! mg e2 + $Ay e2 ! k 2(R + r) cos 2 e1 = 0 .
Si perviene cosı alle due equazioni di equilibrio:
!$Cx ! 2k(R + r) cos 2 = 0 !$Cy ! mg + $Ay = 0 .
Seconda equazione cardinale della statica per l’asta ACE conveniente impostare la seconda equazione cardinale della statica rispetto all’estremo C ,poiche in tal modo vengono eliminate le due componenti incognite di *$C anziche l’unicacomponente $Ay. Si ha allora la relazione vettoriale
(C !C) # (!*$C) + (G ! C)# (!mg e2) + (A ! C)# [!k(A ! O) + $Ay e2] = 0
che grazie alle espressioni
G ! C =R + r
2(cos 2 e1 ! sin2 e2) A ! C = (R + r)(cos 2 e1 ! sin2 e2)
viene ricondotta a
R + r
2(cos 2 e1 ! sin 2 e2) # (!mg e2)+
+(R + r)(cos 2 e1 ! sin 2 e2) # [!2k(R + r) cos 2 e1 + $Ay e2] = 0
e quindi a
!R + r
2mg cos 2 e3 + (R + r)
7cos 2$Ay ! 2k(R + r) sin 2 cos 2
8e3 = 0 .
La seconda equazione cardinale statica in C per l’asta porge pertanto la sola equazione diequilibrio
!12mg cos 2 + cos 2$Ay ! 2k(R + r) sin 2 cos 2 = 0 .
(b) Equilibri mediante le equazioni cardinali della staticaEquazione pura di equilibrioCollezionando tutte le componenti scalari non banali delle equazioni cardinali statiche scritteper disco ed asta si perviene al seguente sistema di equazioni, che esprime la condizio-
Stefano Siboni 2670

Universita degli studi di Trento Esercizi di Meccanica razionale
ne necessaria e su!ciente per l’equilibrio:
$Bx + $Cx = 0 (507.1.a)
$By + $Cy = mg (507.1.b)
sin2$Bx ! cos 2$By = 0 (507.1.c)
$Cx = !2k(R + r) cos 2 (507.1.d)
$Ay !$Cy = mg (507.1.e)
!12mg cos 2 + $Ay cos 2 ! 2k(R + r) sin 2 cos 2 = 0 (507.1.f)
e puo riformularsi nel modo seguente:
$Bx = !$Cx (507.2.a)
$By = mg !$Cy (507.2.b)
sin2$Bx ! cos 2$By = 0 (507.2.c)
$Cx = !2k(R + r) cos 2 (507.2.d)
$Ay = mg + $Cy (507.2.e)
!12mg cos 2 + $Ay cos 2 ! 2k(R + r) sin 2 cos 2 = 0 . (507.2.f)
Le equazioni (507.2.a) e (507.2.b) sostituite nella (507.2.c) la riducono alla forma
sin2 (!$Cx) ! cos 2 (mg ! $Cy) = 0
ossiasin2$Cx + mg cos 2 ! cos 2$Cy = 0 (507.3.c)
che con l’inserimento della (507.2.d) diventa
!2k(R + r) sin 2 cos 2 + mg cos 2 ! cos 2$Cy = 0 (507.4.d)
e porgecos 2$Cy = !2k(R + r) sin 2 cos 2 + mg cos 2 . (507.5.c)
Moltiplicando la (507.2.e) membro a membro per cos 2 si ha allora l’equazione
cos 2$Ay = mg cos 2 + cos 2$Cy
che in virtu della (507.5.c) assume la forma
cos 2$Ay = mg cos 2! 2k(R + r) sin 2 cos 2 + mg cos 2 = 2mg cos 2! 2k(R + r) sin 2 cos 2
Stefano Siboni 2671

Universita degli studi di Trento Esercizi di Meccanica razionale
e sostituita nella (507.2.f) conduce all’equazione pura di equilibrio:
!12mg cos 2 + [2mg cos 2 ! 2k(R + r) sin 2 cos 2] ! 2k(R + r) sin 2 cos 2 = 0
ovvero32mg cos 2 ! 4k(R + r) sin 2 cos 2 = 0
ed infine -38
mg
k(R + r)! sin2
.cos 2 = 0 . (507.6)
Configurazioni di equilibrioL’equazione (507.6) ammette due radici definite incondizionatamente
2 = +"/2 2 = !"/2
per cos 2 = 0, e due ulteriori equilibri
2 = arcsin-38
mg
k(R + r)
.:= 2) 2 = " ! 2) ,
definiti e distinti dai precedenti a condizione che si abbia
38
mg
k(R + r)< 1
in quanto soluzioni dell’equazione parziale sin2 = 3mg/8k(R + r). Giova sottolineare, perla successiva analisi delle reazioni vincolari esterne negli stati di quiete, che 2) " (0,"/2) e" ! 2) " ("/2,").
(c) Reazioni vincolari esterne per gli stati di quieteStato di quiete nella configurazione 2 = "/2In questo caso le equazioni (507.2) si riducono a
'(((((()
((((((*
$Bx = !$Cx
$By = mg ! $Cy
$Bx = 0$Cx = 0$Ay = mg + $Cy
0 = 0
(507.7)
e porgono la soluzione seguente:
$Bx = 0 $Cx = 0 $Ay = mg + $Cy $By = mg ! $Cy
Stefano Siboni 2672

Universita degli studi di Trento Esercizi di Meccanica razionale
che corrisponde alle reazioni vincolari esterne
*$A = (mg + $Cy)e2*$B = (mg ! $Cy)e2
*$C = $Cy e2
definite a meno di una scelta arbitraria della componente $Cy " R. Dal momento che lereazioni vincolari non sono determinate univocamente, in questa configurazione il sistemarisulta staticamente indeterminato.
Stato di quiete nella configurazione 2 = !"/2Nella fattispecie le equazioni (507.2) diventano
'(((((()
((((((*
$Bx = !$Cx
$By = mg ! $Cy
!$Bx = 0$Cx = 0$Ay = mg + $Cy
0 = 0
(507.8)
con lo stesso risultato dell’equilibrio precedente:
$Bx = 0 $Cx = 0 $Ay = mg + $Cy $By = mg ! $Cy .
Il sistema e quindi ancora staticamente indeterminato, con le reazioni vincolari esterne
*$A = (mg + $Cy)e2*$B = (mg ! $Cy)e2
*$C = $Cy e2
individuate a meno della componente arbitraria $Cy " R.
Stato di quiete nella configurazione 2 = 2)
La forma assunta dalle equazioni (507.2) in questa configurazione e la seguente
$Bx = !$Cx (507.9.a)
$By = mg ! $Cy (507.9.b)
sin2)$Bx ! cos 2)$By = 0 (507.9.c)
$Cx = !2k(R + r) cos 2) (507.9.d)
$Ay = mg + $Cy (507.9.e)-!1
2mg + $Ay ! 2k(R + r) sin 2)
.cos 2) = 0 (507.9.f)
nella quale cos 2) &= 0, in modo che la (507.9.f) equivale a
!12mg + $Ay ! 2k(R + r) sin 2) = 0
Stefano Siboni 2673
Universita degli studi di Trento Esercizi di Meccanica razionale
e fornisce
$Ay =12mg + 2k(R + r) sin 2) =
12mg + 2k(R + r)
38
mg
k(R + r)=
54mg . (507.10)
La (507.9.e) diventa cosı
$Cy = $Ay ! mg =54mg ! mg =
14mg (507.11)
e permette di ridurre la (507.9.b) a
$By = mg ! 14mg =
34mg , (507.12)
mentre la (507.9.d) inserita in (507.9.a) porge$Bx = 2k(R + r) cos 2) (507.13)
e la (507.9.c) e soddisfatta. In definitiva:'(((((((((((((()
((((((((((((((*
$Ay =54mg
$Bx = 2k(R + r) cos 2)
$By =34mg
$Cx = !2k(R + r) cos 2)
$Cy =14mg
2) = arcsin-38
mg
k(R + r)
.
per cui le reazioni vincolari all’equilibrio sono definite in modo univoco
*$A =54mg e2
*$B = 2k(R + r) cos 2) e1 +34mg e2
*$C = !2k(R + r) cos 2) e1 +14mg e2
e il sistema risulta, in questa configurazione, staticamente determinato.
Stato di quiete nella configurazione 2 = " ! 2)
In questa configurazione le equazioni cardinali statiche delle parti rigide costituenti il sistemasi riducono a:
$Bx = !$Cx (507.14.a)
$By = mg !$Cy (507.14.b)
sin2)$Bx + cos 2)$By = 0 (507.14.c)
$Cx = 2k(R + r) cos 2) (507.14.d)
$Ay = mg + $Cy (507.14.e)-!1
2mg + $Ay ! 2k(R + r) sin 2)
.cos 2) = 0 . (507.14.f)
Stefano Siboni 2674

Universita degli studi di Trento Esercizi di Meccanica razionale
La (507.14.f) fornisce, come prima,
$Ay =12mg + 2k(R + r) sin 2) =
54mg (507.15)
per cui la (507.14.e) conduce a
$Cy = $Ay ! mg =54mg ! mg =
14mg . (507.16)
Dalle equazioni (507.14.d) e (507.14.a) si deduce inoltre
$Bx = !2k(R + r) cos 2) (507.17)
mentre da (507.14.b) e (507.16) si ha
$By = mg ! 14mg =
34mg . (507.18)
Si verifica infine che la (507.14.c) e soddisfatta:
sin2) $Bx + cos 2) $By = ! sin2) 2k(R + r) cos 2) + cos 2) 34mg =
= 2k(R + r) cos 2)
-! sin 2) +
38
mg
k(R + r)
.= 2k(R + r) cos 2) · 0 = 0 .
In conclusione, in questa configurazione il sistema si presenta staticamente determinato
'(((((((((((((()
((((((((((((((*
$Ay =54mg
$Bx = !2k(R + r) cos 2)
$By =34mg
$Cx = 2k(R + r) cos 2)
$Cy =14mg
2) = arcsin-38
mg
k(R + r)
.
con le reazioni vincolari esterne
*$A =54mg e2
*$B = !2k(R + r) cos 2) e1 +34mg e2
*$C = 2k(R + r) cos 2) e1 +14mg e2 .
Stefano Siboni 2675
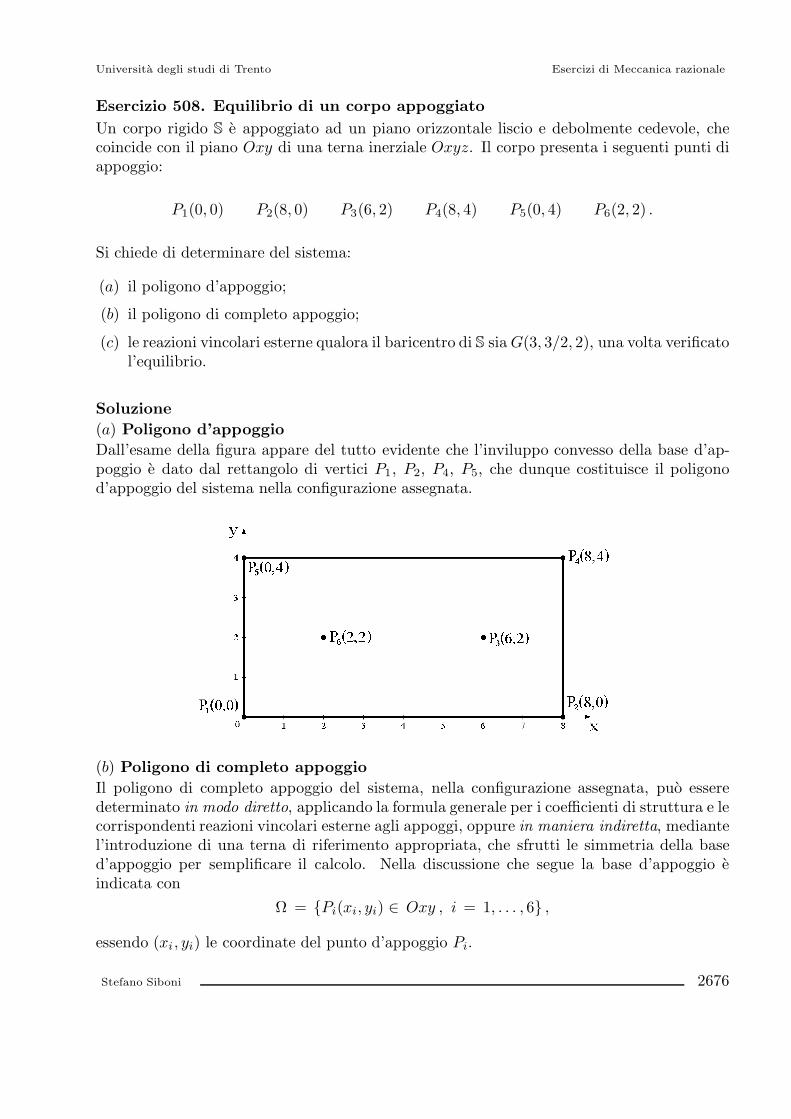
Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 508. Equilibrio di un corpo appoggiatoUn corpo rigido S e appoggiato ad un piano orizzontale liscio e debolmente cedevole, checoincide con il piano Oxy di una terna inerziale Oxyz. Il corpo presenta i seguenti punti diappoggio:
P1(0, 0) P2(8, 0) P3(6, 2) P4(8, 4) P5(0, 4) P6(2, 2) .
Si chiede di determinare del sistema:
(a) il poligono d’appoggio;
(b) il poligono di completo appoggio;
(c) le reazioni vincolari esterne qualora il baricentro di S sia G(3, 3/2, 2), una volta verificatol’equilibrio.
Soluzione(a) Poligono d’appoggioDall’esame della figura appare del tutto evidente che l’inviluppo convesso della base d’ap-poggio e dato dal rettangolo di vertici P1, P2, P4, P5, che dunque costituisce il poligonod’appoggio del sistema nella configurazione assegnata.
(b) Poligono di completo appoggioIl poligono di completo appoggio del sistema, nella configurazione assegnata, puo esseredeterminato in modo diretto, applicando la formula generale per i coe!cienti di struttura e lecorrispondenti reazioni vincolari esterne agli appoggi, oppure in maniera indiretta, mediantel’introduzione di una terna di riferimento appropriata, che sfrutti le simmetria della based’appoggio per semplificare il calcolo. Nella discussione che segue la base d’appoggio eindicata con
# = {Pi(xi, yi) " Oxy , i = 1, . . . , 6} ,
essendo (xi, yi) le coordinate del punto d’appoggio Pi.
Stefano Siboni 2676

Universita degli studi di Trento Esercizi di Meccanica razionale
Metodo direttoLa matrice necessaria per il calcolo dei coe!cienti di struttura e delle reazioni vincolariesterne agli appoggi e data da:
S =
/
1Sxx Sxy Sx
Sxy Syy Sy
Sx Sy ##
2
4 =
/
1168 48 2448 40 1224 12 6
2
4 = 2
/
184 24 1224 20 612 6 3
2
4
per via delle ovvie espressioni:
Sxx =69
i=1
x2i = 02 + 82 + 62 + 82 + 02 + 22 = 168
Sxy =69
i=1
xiyi = 0 · 0 + 8 · 0 + 6 · 2 + 8 · 4 + 0 · 4 + 2 · 2 = 48
Syy =69
i=1
y2i = 02 + 02 + 22 + 42 + 42 + 22 = 40
Sx =69
i=1
xi = 0 + 8 + 6 + 8 + 0 + 2 = 24
Sy =69
i=1
xi = 0 + 0 + 2 + 4 + 4 + 2 = 12 ,
oltre a ## = 6. Il determinante della matrice — simmetrica — si scrive
detS = 8
!!!!!!
84 24 1224 20 612 6 3
!!!!!!= 8
+84!!!!20 66 3
!!!!! 24!!!!24 612 3
!!!!+ 12!!!!24 2012 6
!!!!
,=
= 8784 · 24 ! 24(72 ! 72) + 12(144 ! 240)
8= 8(84 · 24 ! 12 · 96) = 6912
e consente di esprimere la relativa inversa — pure simmetrica — per mezzo del teorema diLaplace:
S!1 =4
6912
/
0000000001
!!!!20 66 3
!!!! !!!!!24 126 3
!!!!
!!!!24 1220 6
!!!!
-!!!!84 1212 3
!!!! !!!!!84 1224 6
!!!!
- -!!!!84 2424 20
!!!!
2
3333333334
=
=1
1728
/
124 0 !960 108 !216
!96 !216 1104
2
4 =1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 .
Stefano Siboni 2677
Universita degli studi di Trento Esercizi di Meccanica razionale
Il poligono di completo appoggio e allora definito dall’insieme
A =
')
*(xG, yG) " R2 : (xi yi 1)S!1
/
1xG
yG
1
2
4 > 0 , i = 1, . . . , 6
PQ
R . (508.1)
Conviene calcolare in primo luogo i prodotti parziali costanti:
(x1 y1 1)S!1 = (0 0 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =1
432(!24 ! 54 276)
(x2 y2 1)S!1 = (8 0 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =
=1
432(48 ! 24 ! 54 ! 8 · 24 + 276) =
1432
(24 ! 54 84)
(x3 y3 1)S!1 = (6 2 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =
=1
432(36 ! 24 54 ! 54 ! 144 ! 108 + 276) =
1432
(12 0 24)
(x4 y4 1)S!1 = (8 4 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =
=1
432(48 ! 24 4 · 27 ! 54 ! 8 · 24! 4 · 54 + 276) =
=1
432(24 54 ! 132)
(x5 y5 1)S!1 = (0 4 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =
=1
432(!24 4 · 27 ! 54 ! 4 · 54 + 276) =
1432
(!24 54 60)
(x6 y6 1)S!1 = (2 2 1)1
432
/
16 0 !240 27 !54
!24 !54 276
2
4 =
=1
432(12 ! 24 0 ! 48 ! 108 + 276) =
1432
(!12 0 120) .
Stefano Siboni 2678
Universita degli studi di Trento Esercizi di Meccanica razionale
in modo che, posto per brevita (xG, yG) = (x, y), si perviene alle espressioni:
(x1 y1 1)S!1
/
1xy1
2
4 =1
432(!24 ! 54 276)
/
1xy1
2
4 =1
432(!24x ! 54y + 276)
(x2 y2 1)S!1
/
1xy1
2
4 =1
432(24 ! 54 84)
/
1xy1
2
4 =1
432(24x ! 54y + 84)
(x3 y3 1)S!1
/
1xy1
2
4 =1
432(12 0 24)
/
1xy1
2
4 =1
432(12x + 24)
(x4 y4 1)S!1
/
1xy1
2
4 =1
432(24 54 ! 132)
/
1xy1
2
4 =1
432(24x + 54y ! 132)
(x5 y5 1)S!1
/
1xy1
2
4 =1
432(!24 54 60)
/
1xy1
2
4 =1
432(!24x + 54y + 60)
(x6 y6 1)S!1
/
1xy1
2
4 =1
432(!12 0 120)
/
1xy1
2
4 =1
432(!12x + 120) .
I punti del poligono di completo appoggio sono tutte e sole le coppie (x, y) che soddisfano ilsistema di disequazioni lineari:
'(((((((((((()
((((((((((((*
!24x ! 54y + 276 > 0
24x ! 54y + 84 > 0
12x + 24 > 0
24x + 54y ! 132 > 0
!24x + 54y + 60 > 0
!12x + 120 > 0
1+
'(((((((((((()
((((((((((((*
!4x ! 9y + 46 > 0
4x ! 9y + 14 > 0
x + 2 > 0
4x + 9y ! 22 > 0
!4x + 9y + 10 > 0
!x + 10 > 0 .
(508.2)
La disequazione !4x ! 9y + 46 > 0 individua il semipiano aperto contenente l’origine edelimitato dalla retta di equazione
!4x ! 9y + 46 = 0
che interseca gli assi coordinati nei punti (0, 46/9) e (23/2, 0).La relazione 4x ! 9y + 14 > 0 descrive invece il semipiano aperto che contiene l’origine edha come frontiera la retta 4x ! 9y + 14 = 0, le cui intersezioni con gli assi coordinati sono ipunti (0, 14/9) e (!7/2, 0).
Stefano Siboni 2679

Universita degli studi di Trento Esercizi di Meccanica razionale
Per 4x + 9y ! 22 > 0 si ottiene il semipiano aperto che non contiene l’origine e che ha perfrontiera la retta 4x + 9y ! 22 = 0, passante per i punti (0, 22/9) e (11/2, 0).Alla diseguaglianza!4x+9y+10 > 0 corrisponde il semipiano aperto comprendente l’originee delimitato dalla retta di equazione !4x + 9y + 10 = 0, le cui intersezioni con gli assicoordinati sono date dai punti (0,!10/9) e (5/2, 0).Le disequazioni x + 2 > 0 e !x + 10 > 0 individuano infine la striscia aperta !2 < x < 10.La figura seguente mette in evidenza, con l’ombreggiatura, la soluzione A del sistema (508.2)— i numeri progressivi indicano le disequazioni del sistema, ordinate dall’alto verso il basso:
Metodo indirettoIl sistema di punti materiali ottenuto attribuendo massa unitaria a tutti i punti della based’appoggio ha baricentro B determinato da
B ! O =16
69
i=1
(xie1 + yie2) =16Sx e1 +
16Sy e2 =
16
24 e1 +16
12 e2 = 4 e1 + 2 e2 .
Le rette B+ e B0, rispettivamente parallele agli assi Ox e Oy, costituiscono ovvi assi disimmetria per cui B+0z e una terna centrale d’inerzia dello stesso sistema materiale fittizio.Rispetto a B+0z le coordinate dei punti di appoggio risultano:
P1(!4,!2) P2(4,!2) P3(2, 0) P4(4, 2) P5(!4, 2) P6(!2, 0)
con
S!! =69
i=1
+2i = (!4)2 + 42 + 22 + 42 + (!4)2 + (!2)2 = 72
S'' =69
i=1
02i = (!2)2 + (!2)2 + 02 + 22 + 22 + 02 = 16
S!' =69
i=1
+i0i = 0 S! =69
i=1
+i = 0 S' =69
i=1
0i = 0
Stefano Siboni 2680

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui la matrice S assume la forma diagonale:
S =
/
172 0 00 16 00 0 6
2
4 .
Nella terna O+0z l’area di completo appoggio e dunque individuata da
A =
')
*(+, 0) " R2 : (+i 0i 1)S!1
/
1+01
2
4 > 0 % i = 1, . . . , 6
PQ
R
ossia, esplicitando l’inversa della matrice S ed eseguendo i prodotti matriciali,
A =D
(+, 0) " R2 :+i
72+ +
0i
160 +
16
> 0 % i = 1, . . . , 6E
=
=6S
i=1
D(+, 0) " R2 :
+i
72+ +
0i
160 +
16
> 0E
.
Basta cosı sostituire le coordinate degli appoggi per ottenere il sistema di disequazioni:
'(((((((((((((((((()
((((((((((((((((((*
! 472
+ ! 216
0 +16
> 0
472
+ ! 216
0 +16
> 0
272
+ +16
> 0
472
+ +216
0 +16
> 0
! 472
+ +216
0 +16
> 0
! 272
+ +16
> 0
1+
'(((((((((((((((((()
((((((((((((((((((*
!13+ ! 3
40 + 1 > 0
13+ ! 3
40 + 1 > 0
16+ + 1 > 0
13+ +
340 + 1 > 0
!13+ +
340 + 1 > 0
!16+ + 1 > 0
ovvero il sistema equivalente '(((((((((((()
((((((((((((*
!4+ ! 90 + 12 > 0
4+ ! 90 + 12 > 0
+ + 6 > 0
4+ + 90 + 12 > 0
!4+ + 90 + 12 > 0
!+ + 6 > 0
(508.3)
Stefano Siboni 2681

Universita degli studi di Trento Esercizi di Meccanica razionale
che ammette il dominio di soluzioni evidenziato con il tratteggio nella figura seguente:
Questo sistema di disequazioni puo ricondursi facilmente al sistema (508.2) con l’introduzio-ne del cambiamento di variabili:
+ = x ! xB = x ! 4 0 = y ! yB = y ! 2
che sostituito in (508.3) fornisce
'(((((((((((()
((((((((((((*
!4(x ! 4) ! 9(y ! 2) + 12 > 0
4(x ! 4) ! 9(y ! 2) + 12 > 0
(x ! 4) + 6 > 0
4(x ! 4) + 9(y ! 2) + 12 > 0
!4(x ! 4) + 9(y ! 2) + 12 > 0
!(x ! 4) + 6 > 0
1+
'(((((((((((()
((((((((((((*
!4x ! 9y + 46 > 0
4x ! 9y + 14 > 0
x + 2 > 0
4x + 9y ! 22 > 0
!4x + 9y + 10 > 0
!x + 10 > 0
(508.4)
come a"ermato.
(c) Reazioni vincolari esterne sugli appoggiSe il baricentro G del sistema ha coordinate (3, 3/2, 2), il centro di pressione e individuatodal vettore posizione
C ! O = xG e1 + yG e2 = 3 e1 +32e2
che appartiene chiaramente al poligono d’appoggio ed assicura pertanto che la configurazionedel sistema sia un equilibrio. A questo sono associati i coe!cienti di struttura:/
1abc
2
4 = S!1
/
1xG
yG
1
2
4mg =1
432
/
16 0 !240 27 !54
!24 !54 276
2
4
/
13
3/21
2
4mg =1
432
/
1!6
!27/2123
2
4mg.
Stefano Siboni 2682
Universita degli studi di Trento Esercizi di Meccanica razionale
Le componenti verticali delle reazioni vincolari esterne agli appoggi sono percio:
$i = (xi yi 1)
/
1abc
2
4 =1
432(xi yi 1)
/
1!6
!27/2123
2
4mg i = 1, . . . , 6
ossia:
$1 =1
432(0 0 1)
/
1!6
!27/2123
2
4mg =123432
mg =41144
mg
$2 =1
432(8 0 1)
/
1!6
!27/2123
2
4mg =75432
mg =25144
mg
$3 =1
432(6 2 1)
/
1!6
!27/2123
2
4mg =60432
mg =536
mg
$4 =1
432(8 4 1)
/
1!6
!27/2123
2
4mg =21432
mg =7
144mg
$5 =1
432(0 4 1)
/
1!6
!27/2123
2
4mg =69432
mg =23144
mg
$6 =1
432(2 2 1)
/
1!6
!27/2123
2
4mg =84432
mg =736
mg
e risultano tutte positive. In e"etti e facile verificare che il centro di pressione appartiene alpoligono di completo appoggio, dal momento che le coordinate (xG, yG) = (3, 3/2) soddisfanoil sistema (508.4): '
(((((((((((((((((()
((((((((((((((((((*
!4xG ! 9yG + 46 =412
> 0
4xG ! 9yG + 14 =252
> 0
xG + 2 = 5 > 0
4xG + 9yG ! 22 =72
> 0
!4xG + 9yG + 10 =232
> 0
!xG + 10 = 7 > 0 .
Stefano Siboni 2683

Universita degli studi di Trento Esercizi di Meccanica razionale
Vale la pena di notare, a riprova del risultato, che la somma delle reazioni vincolari esternebilancia esattamente il peso totale del corpo S:
69
i=1
$i =41144
mg +25144
mg +536
mg +7
144mg +
23144
mg +736
mg = mg .
Concludendo, le reazioni vincolari agenti sui punti di appoggio del sistema nello stato diquiete sono:
*$1 =41144
mg e3*$2 =
25144
mg e3*$3 =
536
mg e3
*$4 =7
144mg e3
*$5 =23144
mg e3*$6 =
736
mg e3 .
Esercizio 509. Discussione di WeierstrassUn punto materiale di massa unitaria e vincolato a scorrere lungo l’asse Ox e sottoposto aduna forza posizionale di potenziale
U(x) = e!x2(!x4 + 3x2 ! 1) , x " R .
(a) Determinare le condizioni iniziali corrispondenti ai moti periodici.(b) Individuare per quali condizioni iniziali i moti del sistema sono a meta asintotica.(c) Disegnare il ritratto di fase del sistema, specificando i livelli di energia relativi alle varie
orbite.
SoluzioneIl sistema e scleronomo, posizionale conservativo e ad un solo grado di liberta. L’andamentoqualitativo dei moto puo quindi essere determinato ricorrendo all’analisi di Weierstrass. Alpunto materiale e associata l’energia potenziale
W (x) = !U(x) = e!x2(x4 ! 3x2 + 1) , x " R ,
che e una funzione pari dell’intervallo reale. La derivata prima di W si scrive
W "(x) = e!x22x(!x4 + 3x2 ! 1) + e!x2
(4x3 ! 6x) =
= e!x22x(!x4 + 3x2 ! 1 + 2x2 ! 3) =
= e!x22x(!x4 + 5x2 ! 4) = !e!x2
2x(x4 ! 5x2 + 4) =
= !e!x22x(x4 ! x2 ! 4x2 + 4) = !e!x2
2x[x2(x2 ! 1) ! 4(x2 ! 1)] =
= !e!x22x(x2 ! 4)(x2 ! 1) = !e!x2
2x(x ! 2)(x + 2)(x ! 1)(x + 1)
ed annullandola si deducono i punti critici corrispondenti agli equilibri del sistema:
x = !2 x = !1 x = 0 x = 1 x = 2 .
Stefano Siboni 2684
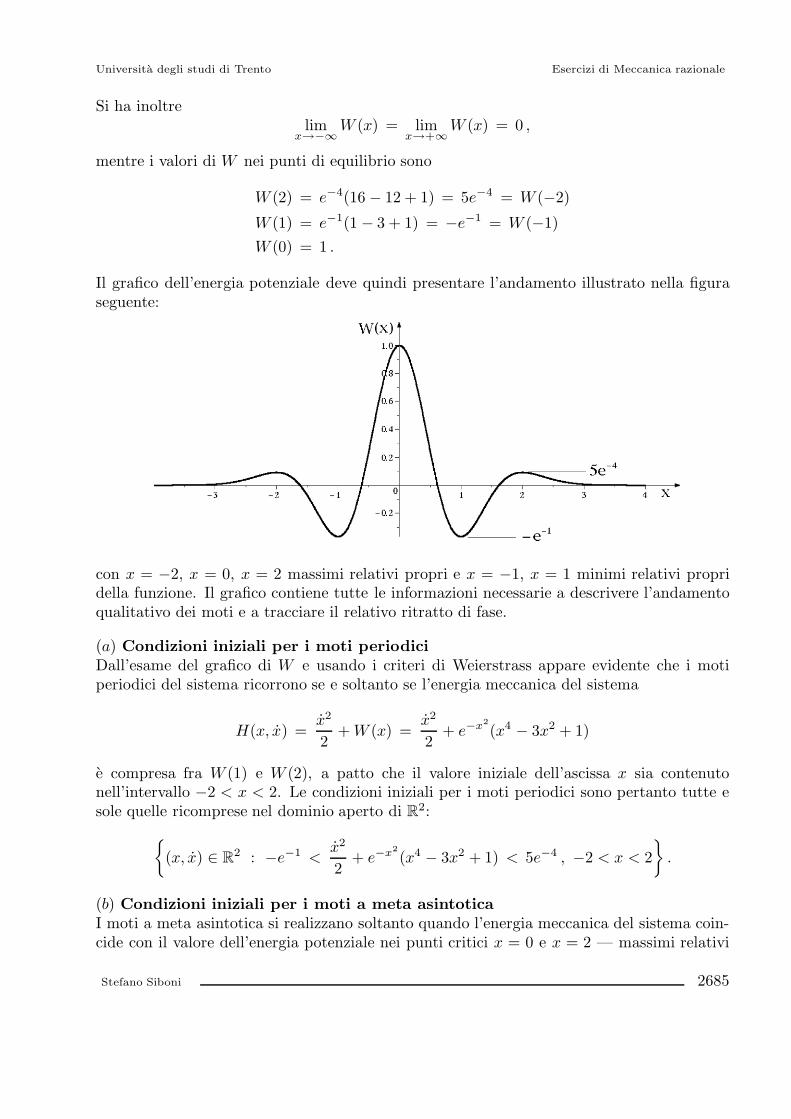
Universita degli studi di Trento Esercizi di Meccanica razionale
Si ha inoltrelim
x$!%W (x) = lim
x$+%W (x) = 0 ,
mentre i valori di W nei punti di equilibrio sono
W (2) = e!4(16 ! 12 + 1) = 5e!4 = W (!2)
W (1) = e!1(1 ! 3 + 1) = !e!1 = W (!1)W (0) = 1 .
Il grafico dell’energia potenziale deve quindi presentare l’andamento illustrato nella figuraseguente:
con x = !2, x = 0, x = 2 massimi relativi propri e x = !1, x = 1 minimi relativi propridella funzione. Il grafico contiene tutte le informazioni necessarie a descrivere l’andamentoqualitativo dei moti e a tracciare il relativo ritratto di fase.
(a) Condizioni iniziali per i moti periodiciDall’esame del grafico di W e usando i criteri di Weierstrass appare evidente che i motiperiodici del sistema ricorrono se e soltanto se l’energia meccanica del sistema
H(x, x) =x2
2+ W (x) =
x2
2+ e!x2
(x4 ! 3x2 + 1)
e compresa fra W (1) e W (2), a patto che il valore iniziale dell’ascissa x sia contenutonell’intervallo !2 < x < 2. Le condizioni iniziali per i moti periodici sono pertanto tutte esole quelle ricomprese nel dominio aperto di R2:
D(x, x) " R2 : !e!1 <
x2
2+ e!x2
(x4 ! 3x2 + 1) < 5e!4 , !2 < x < 2E
.
(b) Condizioni iniziali per i moti a meta asintoticaI moti a meta asintotica si realizzano soltanto quando l’energia meccanica del sistema coin-cide con il valore dell’energia potenziale nei punti critici x = 0 e x = 2 — massimi relativi
Stefano Siboni 2685

Universita degli studi di Trento Esercizi di Meccanica razionale
propri — purche la velocita iniziale sia opportunamente orientata, se del caso. Nella fat-tispecie, i criteri di Weiestrass consentono di trarre le seguenti conclusioni:
! per H(x, x) = W (2) = 5e!4, se il valore iniziale x0 dell’ascissa e compreso fra !2 e0 si ottiene una soluzione omoclina, che tende alla meta asintotica x = !2 tanto pert * +) quanto per t * !);
! per H(x, x) = W (2) = 5e!4 e x0 " (0, 2) e definita un’ulteriore soluzione omoclina,simmetrica alla precedente, ma con meta asintotica x = 2;
! qualora sia H(x, x) = W (2) = 5e!4 e x0 < !2, si perviene ad un moto a meta asin-totica (nel futuro) unicamente per velocita iniziale x0 positiva. La meta asintotica eovviamente x = !2;
! per H(x, x) = W (2) = 5e!4 e x0 > +2, la condizione necessaria e su!ciente a!nche siabbia un moto asintotico (nel futuro) e che x0 < 0. La meta asintotica in questo casoe l’equilibrio x = 2;
! per H(x, x) = W (0) = 1 e x0 < 0, per ottenere un moto asintotico la velocita inizialedeve essere positiva. La meta asintotica risulta x = 0;
! se infine H(x, x) = W (0) = 1 e x0 > 0, sono i valori negativi della velocita iniziale chespecificano i moti asintotici (nel futuro), sempre con meta asintotica x = 0.
Le condizioni iniziali per i moti a meta asintotica (nel futuro) sono dunque quelle apparte-nenti all’insieme:
D(x, x) " R2 :
x2
2+ e!x2
(x4 ! 3x2 + 1) = 5e!4 , !2 < x < 0E0
0D
(x, x) " R2 :x2
2+ e!x2
(x4 ! 3x2 + 1) = 5e!4 , 0 < x < 2E0
0D
(x, x) " R2 :x2
2+ e!x2
(x4 ! 3x2 + 1) = 5e!4 , x < !2 , x > 0E0
0D
(x, x) " R2 :x2
2+ e!x2
(x4 ! 3x2 + 1) = 5e!4 , x > 2 , x < 0E0
0D
(x, x) " R2 :x2
2+ e!x2
(x4 ! 3x2 + 1) = 1 , x < 0 , x > 0E0
0D
(x, x) " R2 :x2
2+ e!x2
(x4 ! 3x2 + 1) = 1 , x > 0 , x < 0E
.
Stefano Siboni 2686
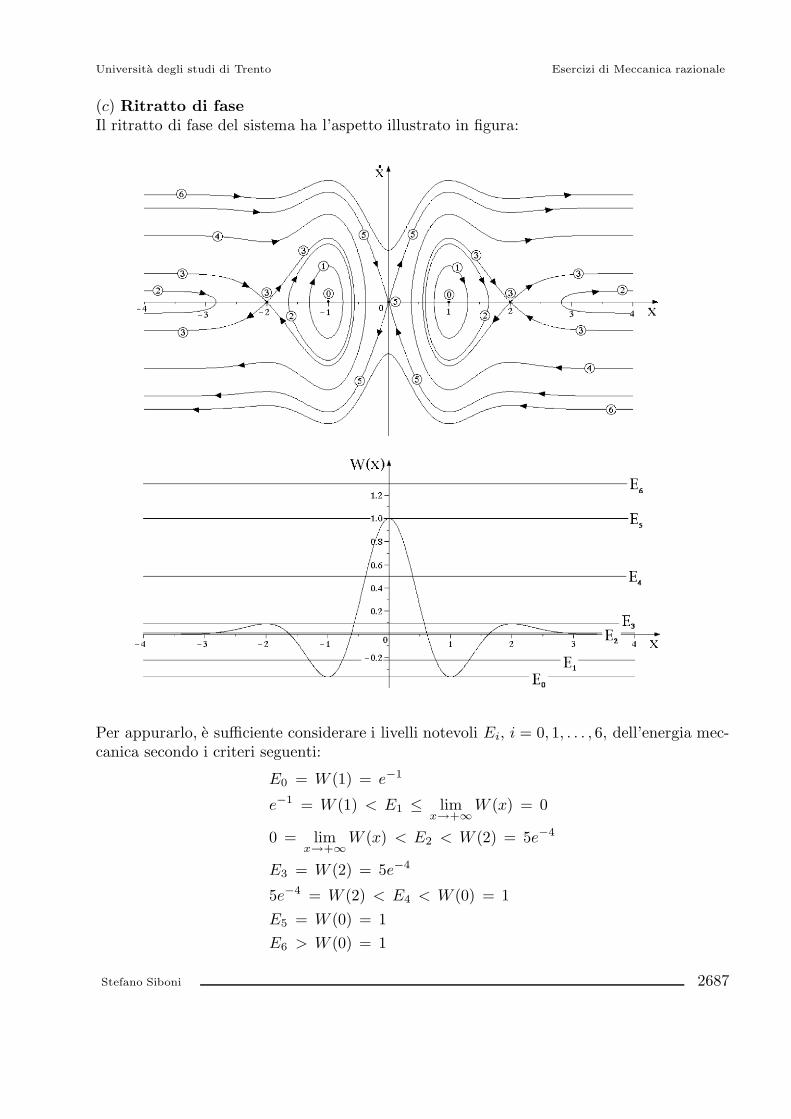
Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Ritratto di faseIl ritratto di fase del sistema ha l’aspetto illustrato in figura:
Per appurarlo, e su!ciente considerare i livelli notevoli Ei, i = 0, 1, . . . , 6, dell’energia mec-canica secondo i criteri seguenti:
E0 = W (1) = e!1
e!1 = W (1) < E1 ' limx$+%
W (x) = 0
0 = limx$+%
W (x) < E2 < W (2) = 5e!4
E3 = W (2) = 5e!4
5e!4 = W (2) < E4 < W (0) = 1E5 = W (0) = 1E6 > W (0) = 1
Stefano Siboni 2687

Universita degli studi di Trento Esercizi di Meccanica razionale
ed applicare i teoremi di Weierstrass. In particolare si osserva che:
! per H = E0 si ottengono gli stati di quiete nelle configurazioni di equilibrio stabilix = !1 e x = 1;
! ogni curva di livello H = E1 corrisponde a due orbite chiuse simmetriche nel piano dellefasi, ciascuna associata ad un moto periodico;
! per H = E2 si individuano 4 orbite distinte, corrispondenti ad altrettante soluzioni.Due di esse sono associate soluzioni periodiche nelle striscie !2 < x < 0 e 0 < x < 2;una terza soluzione, la cui orbita e ubicata nel semipiano x > 2 presenta un unico puntodi inversione e tende a x = +) tanto nel passato quanto nel futuro, risultando peraltrodefinita % t " R. Una quarta soluzione ha orbita nel semipiano x < !2, con un unicopunto di inversione; e definita a tutti i tempi e tende a x = !) sia per t * +) cheper t * !);
! se H = E3 si hanno le due orbite omocline in !2 < x < 0 e 0 < x < 2 e le soluzionia meta asintotica nel futuro gia descritte al punto (b). In piu, vengono individuati glistati di quiete negli equilibri instabili x = !2 e x = 2 e due moti a meta asintotica nelpassato per x > 2 e x < !2 rispettivamente;
! per H = E4 si hanno due moti distinti, uno nel semipiano x > 0 e un altro nel semi-piano x < 0. Entrambi sono definiti % t " R, presentano un solo punto di inversione etendono, rispettivamente, a x = +) e x = !) tanto nel passato quanto nel futuro;
! per H = E5 si perviene alla quiete nella posizione di equilibrio instabile x = 0 e aidue moti a meta asintotica gia discussi al punto (b) — con meta asintotica in x = 0nel futuro. Ricorrono anche due moti a meta asintotica nel passato, sempre con metaasintotica x = 0 e tendenti a x = +) e x = !) nel futuro;
! se infine H = E6, il moto non presenta ne punti di inversione ne mete asintotiche esi mantiene indefinitamente progressivo per velocita iniziale positiva e indefinitamenteretrogrado per velocita iniziale negativa.
Esercizio 510. Analisi di Weierstrass con biforcazioneUn sistema scleronomo ad un grado di liberta e descritto dalla coordinata lagrangiana 2 " Re soggetto a sollecitazioni posizionali (conservative) di potenziale
U(2) = a(cos 2 + µ sin22) , 2 " R ,
con a > 0 e µ > 0. Sapendo che l’energia cinetica del sistema si scrive a22/2, determinare:
(a) gli equilibri del sistema;
(b) il ritratto di fase del sistema per µ < 1/2;
(c) il ritratto di fase del sistema per µ = 1/2;
(d) il ritratto di fase del sistema per µ > 1/2.
Stefano Siboni 2688

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) EquilibriIl sistema e scleronomo posizionale e conservativo, a vincoli bilaterali ideali. Il potenzialedelle forze attive si scrive
U(2) = a(cos 2 + µ sin22) , 2 " R ,
e oltre ad essere periodico di periodo 2" ammette le derivate prima e seconda:
U "(2) = a(! sin 2 + 2µ sin 2 cos 2) = a(!1 + 2µ cos 2) sin 2
U ""(2) = a(! cos 2 + 2µ cos22 ! 2µ sin22) .
Gli equilibri del sistema, tutti ordinari, si identificano con i punti critici del potenziale, ossiacon le soluzioni dell’equazione trigonometrica
a(!1 + 2µ cos 2) sin 2 = 0
che ammette due radici definite incondizionatamente per sin2 = 0:
2 = 0 2 = "
e due ulteriori soluzioni per !1 + 2µ cos 2 = 0:
2 = arccos$ 1
2µ
%:= µ) 2 = !arccos
$ 12µ
%:= !µ) ,
definite e distinte dalle precedenti se e soltanto se 1/2µ < 1, vale a dire µ > 1/2.
(b) Ritratto di fase per µ < 1/2In questo caso i soli equilibri del sistema si hanno per 2 = 0 e 2 = ", in corrispondenza deiquali la derivata seconda del potenziale diventa
U ""(0) = a(!1 + 2µ) < 0 U ""(") = a(1 + 2µ) > 0 .
La configurazione 2 = 0 e stabile per Lagrange-Dirichlet, in quanto massimo relativo propriodel potenziale. In 2 = " si ha invece U ""(") > 0 e l’equilibrio risulta instabile per il teoremadi inversione parziale di Lagrange-Dirichlet. Vale inoltre:
U(0) = a U(") = !a
Stefano Siboni 2689
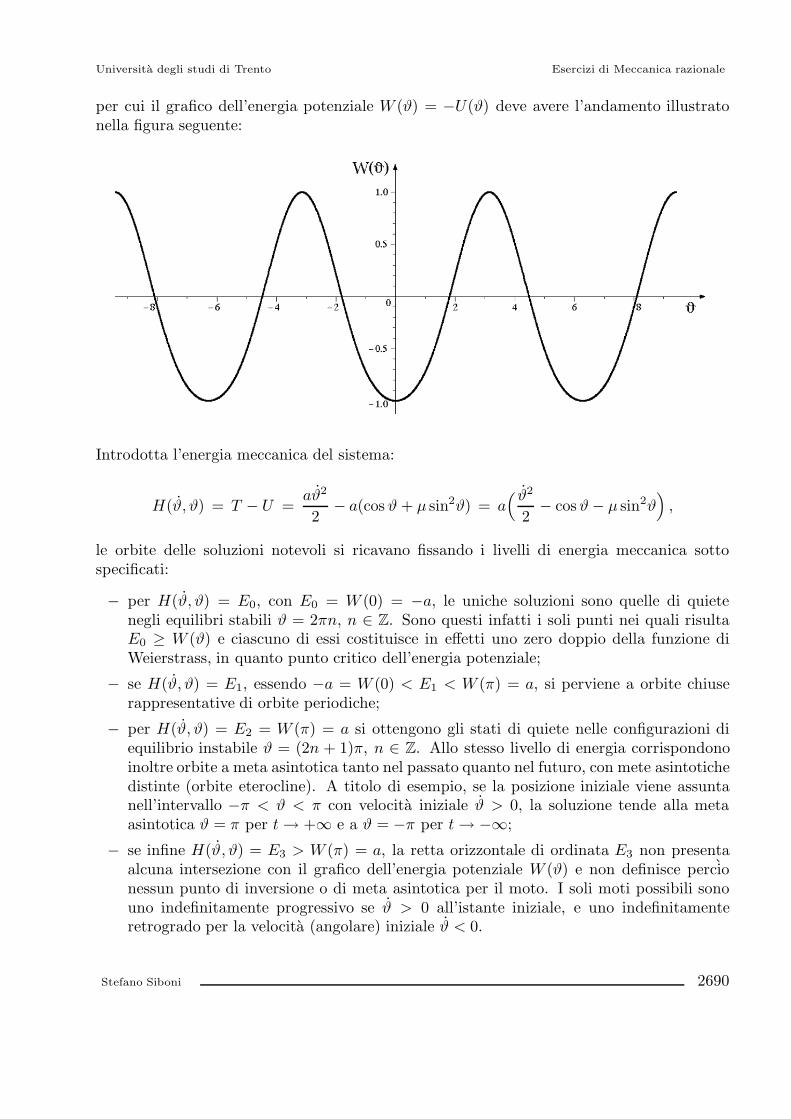
Universita degli studi di Trento Esercizi di Meccanica razionale
per cui il grafico dell’energia potenziale W (2) = !U(2) deve avere l’andamento illustratonella figura seguente:
Introdotta l’energia meccanica del sistema:
H(2,2) = T ! U =a22
2! a(cos 2 + µ sin22) = a
$ 22
2! cos 2 ! µ sin22
%,
le orbite delle soluzioni notevoli si ricavano fissando i livelli di energia meccanica sottospecificati:
! per H(2,2) = E0, con E0 = W (0) = !a, le uniche soluzioni sono quelle di quietenegli equilibri stabili 2 = 2"n, n " Z. Sono questi infatti i soli punti nei quali risultaE0 ( W (2) e ciascuno di essi costituisce in e"etti uno zero doppio della funzione diWeierstrass, in quanto punto critico dell’energia potenziale;
! se H(2,2) = E1, essendo !a = W (0) < E1 < W (") = a, si perviene a orbite chiuserappresentative di orbite periodiche;
! per H(2,2) = E2 = W (") = a si ottengono gli stati di quiete nelle configurazioni diequilibrio instabile 2 = (2n + 1)", n " Z. Allo stesso livello di energia corrispondonoinoltre orbite a meta asintotica tanto nel passato quanto nel futuro, con mete asintotichedistinte (orbite eterocline). A titolo di esempio, se la posizione iniziale viene assuntanell’intervallo !" < 2 < " con velocita iniziale 2 > 0, la soluzione tende alla metaasintotica 2 = " per t * +) e a 2 = !" per t * !);
! se infine H(2,2) = E3 > W (") = a, la retta orizzontale di ordinata E3 non presentaalcuna intersezione con il grafico dell’energia potenziale W (2) e non definisce percionessun punto di inversione o di meta asintotica per il moto. I soli moti possibili sonouno indefinitamente progressivo se 2 > 0 all’istante iniziale, e uno indefinitamenteretrogrado per la velocita (angolare) iniziale 2 < 0.
Stefano Siboni 2690
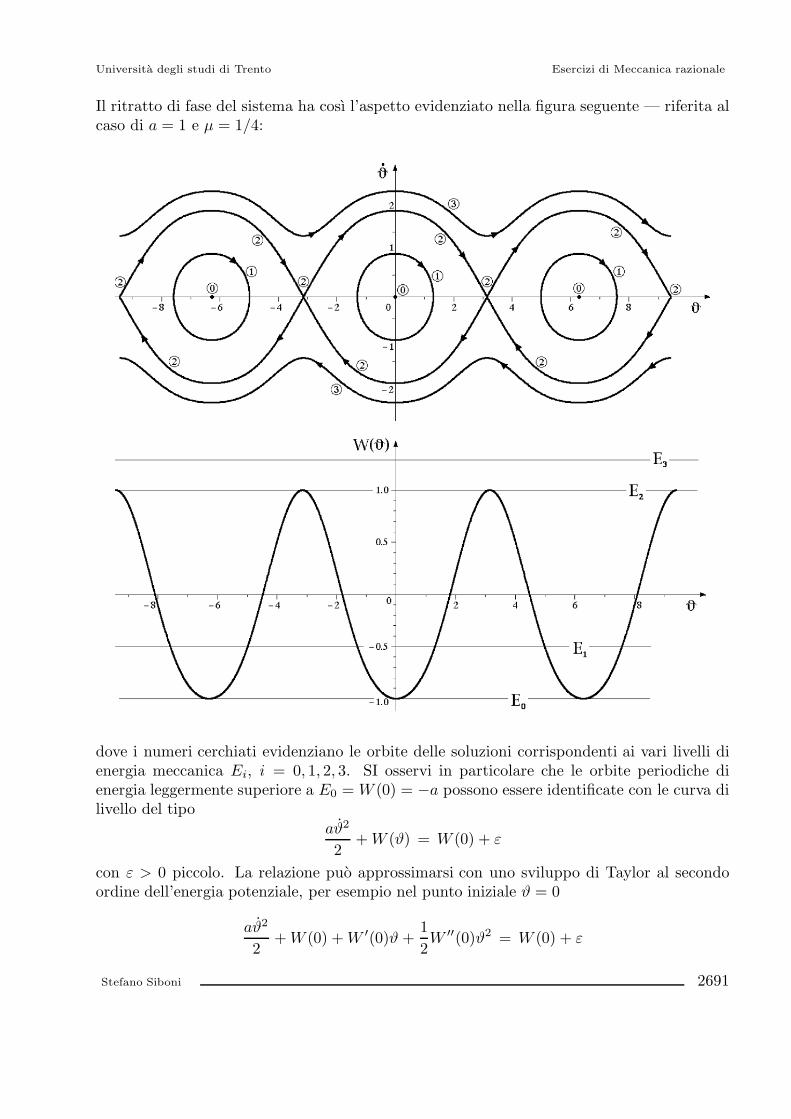
Universita degli studi di Trento Esercizi di Meccanica razionale
Il ritratto di fase del sistema ha cosı l’aspetto evidenziato nella figura seguente — riferita alcaso di a = 1 e µ = 1/4:
dove i numeri cerchiati evidenziano le orbite delle soluzioni corrispondenti ai vari livelli dienergia meccanica Ei, i = 0, 1, 2, 3. SI osservi in particolare che le orbite periodiche dienergia leggermente superiore a E0 = W (0) = !a possono essere identificate con le curva dilivello del tipo
a22
2+ W (2) = W (0) + 1
con 1 > 0 piccolo. La relazione puo approssimarsi con uno sviluppo di Taylor al secondoordine dell’energia potenziale, per esempio nel punto iniziale 2 = 0
a22
2+ W (0) + W "(0)2 +
12W ""(0)22 = W (0) + 1
Stefano Siboni 2691

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
a 22
2+
12a(1 ! 2µ)22 = 1
e quindi
a 22
21+
a
21(1 ! 2µ)22 = 1
che descrive un’ellisse di centro (2, 2) = (0, 0) ed assi rispettivamente paralleli a quellicoordinati.
(c) Ritratto di fase per µ = 1/2
Anche per questo valore del parametro d’ordine µ il sistema ammette le due sole configu-razioni di equilibrio 2 = 0 e 2 = ". Dal segno positivo della derivata seconda
U ""(") = 2a > 0
segue immediatamente che 2 = " costituisce ancora un minimo relativo proprio del poten-ziale. Per la derivata seconda di U in 0 si ha invece
U ""(0) = 0
per cui si rende necessario calcolare le derivate successive
U (3)(2) = a[sin2 ! 2 sin(22)] =+ U (3)(0) = 0
U (4)(2) = a[cos 2 ! 4 cos(22)] =+ U (4)(0) = !3a
dalle quali si deduce lo sviluppo di Taylor al quarto ordine
U(2) = U(0)+U "(0)2+12U ""(0)22 +
13!
U (3)(0)23 +14!
U (4)(0)24 + o(24) = a! a
824 + o(24)
che consente di riconoscere in 2 = 0 un massimo relativo proprio di U . Il grafico dell’energia
Stefano Siboni 2692
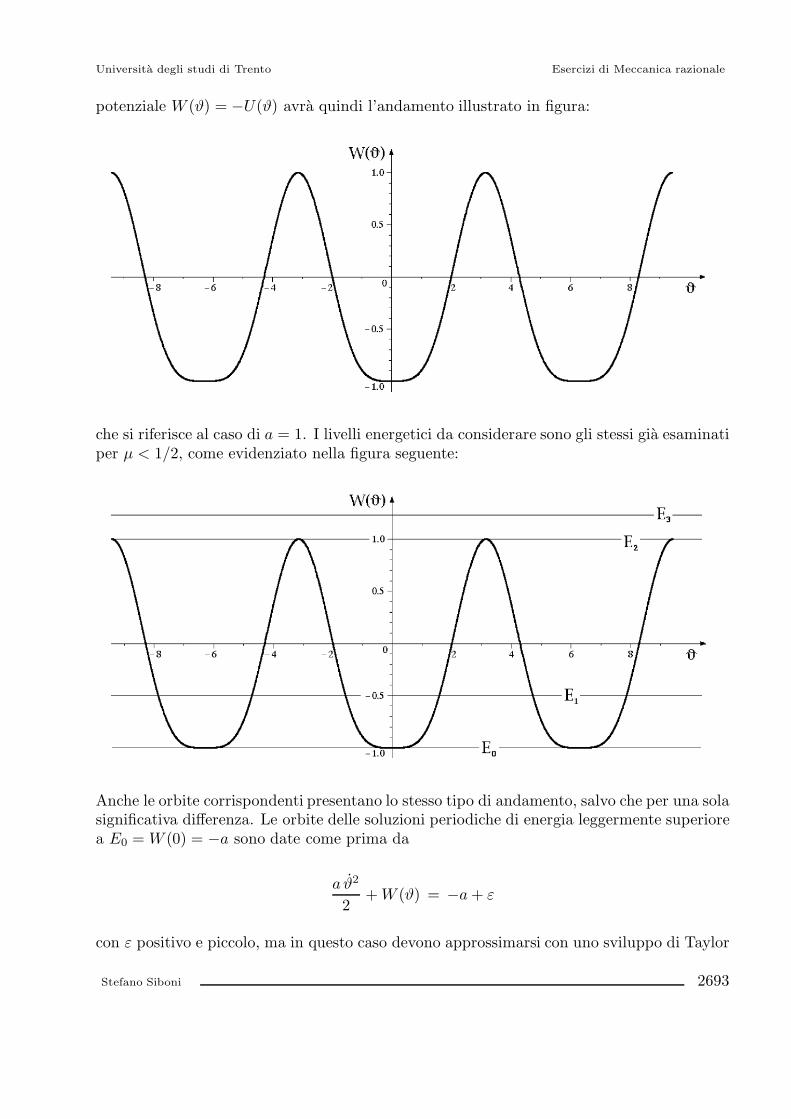
Universita degli studi di Trento Esercizi di Meccanica razionale
potenziale W (2) = !U(2) avra quindi l’andamento illustrato in figura:
che si riferisce al caso di a = 1. I livelli energetici da considerare sono gli stessi gia esaminatiper µ < 1/2, come evidenziato nella figura seguente:
Anche le orbite corrispondenti presentano lo stesso tipo di andamento, salvo che per una solasignificativa di"erenza. Le orbite delle soluzioni periodiche di energia leggermente superiorea E0 = W (0) = !a sono date come prima da
a 22
2+ W (2) = !a + 1
con 1 positivo e piccolo, ma in questo caso devono approssimarsi con uno sviluppo di Taylor
Stefano Siboni 2693
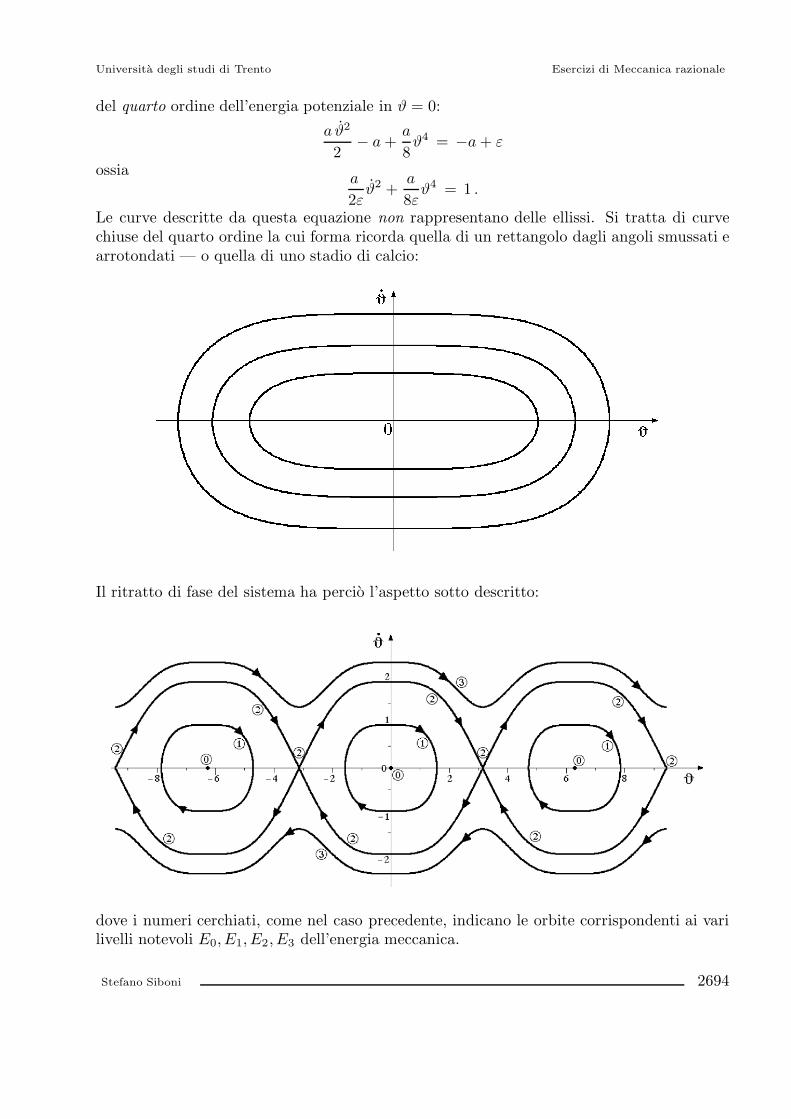
Universita degli studi di Trento Esercizi di Meccanica razionale
del quarto ordine dell’energia potenziale in 2 = 0:a 22
2! a +
a
824 = !a + 1
ossia a
2122 +
a
8124 = 1 .
Le curve descritte da questa equazione non rappresentano delle ellissi. Si tratta di curvechiuse del quarto ordine la cui forma ricorda quella di un rettangolo dagli angoli smussati earrotondati — o quella di uno stadio di calcio:
Il ritratto di fase del sistema ha percio l’aspetto sotto descritto:
dove i numeri cerchiati, come nel caso precedente, indicano le orbite corrispondenti ai varilivelli notevoli E0, E1, E2, E3 dell’energia meccanica.
Stefano Siboni 2694

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Ritratto di fase per µ > 1/2Nella fattispecie il sistema ammette quattro distinte configurazioni di equilibrio in 2 "[0, 2"):
2 = 0 2 = " 2 = arccos(1/2µ) := 2) 2 = !arccos(1/2µ) = !2) .
Dalla derivata seconda del potenziale
U ""(2) = a(! cos 2 + 2µ cos22 ! 2µ sin22)
si deduce che:
! l’equilibrio 2 = 0 costituisce un minimo relativo proprio del potenziale, in quanto
U ""(0) = a(!1 + 2µ) > 0 ;
! l’equilibrio 2 = " e anch’esso un minimo relativo proprio di U , causa il segno positivodella derivata seconda
U ""(") = a(1 + 2µ) > 0 ;
! la configurazione 2 = 2) rappresenta un massimo relativo proprio del potenziale, comee immediato verificare calcolando la derivata seconda di U
U ""(2)) = a(! cos 2) + 2µ cos22) ! 2µ + 2µ cos22)) =
= a$! 1
2µ+ 2µ
14µ2
! 2µ + 2µ1
4µ2
%= !2µa
$1 ! 4µ2
%< 0 ;
! l’equilibrio simmetrico 2 = !2) e del pari un massimo relativo proprio di U , avendosi
U ""(!2)) = U ""(2)) < 0 .
A cio si aggiunga cheU(0) = a U(") = !a
mentre
U(2)) = U(!2)) = a(cos 2) + µ sin22)) = a(cos 2) + µ ! µ cos22)) =
= a$ 1
2µ+ µ ! µ
14µ2
%=
a
2
$2µ +
12µ
%
espressione che, come e immediato verificare, e sempre maggiore di a per qualsiasiµ > 1/2, peraltro crescendo al crescere di µ. Il grafico dell’energia potenziale W (2) =
Stefano Siboni 2695
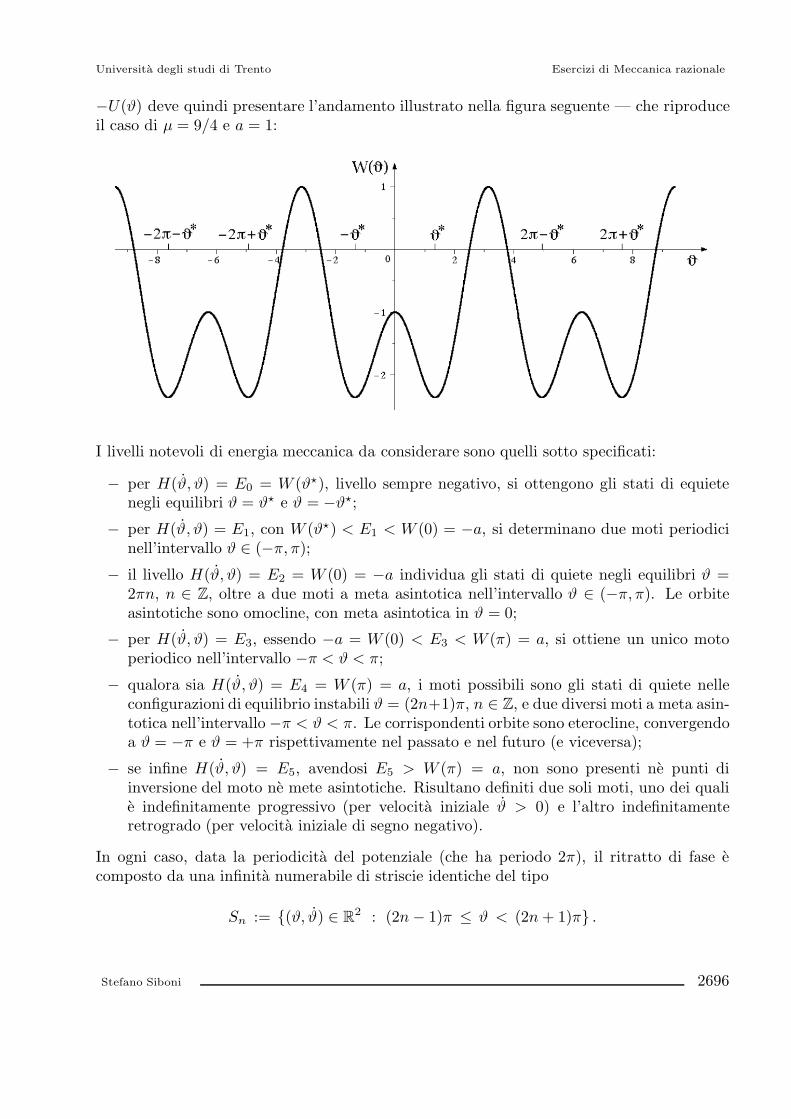
Universita degli studi di Trento Esercizi di Meccanica razionale
!U(2) deve quindi presentare l’andamento illustrato nella figura seguente — che riproduceil caso di µ = 9/4 e a = 1:
I livelli notevoli di energia meccanica da considerare sono quelli sotto specificati:
! per H(2,2) = E0 = W (2)), livello sempre negativo, si ottengono gli stati di equietenegli equilibri 2 = 2) e 2 = !2);
! per H(2,2) = E1, con W (2)) < E1 < W (0) = !a, si determinano due moti periodicinell’intervallo 2 " (!",");
! il livello H(2,2) = E2 = W (0) = !a individua gli stati di quiete negli equilibri 2 =2"n, n " Z, oltre a due moti a meta asintotica nell’intervallo 2 " (!","). Le orbiteasintotiche sono omocline, con meta asintotica in 2 = 0;
! per H(2,2) = E3, essendo !a = W (0) < E3 < W (") = a, si ottiene un unico motoperiodico nell’intervallo !" < 2 < ";
! qualora sia H(2,2) = E4 = W (") = a, i moti possibili sono gli stati di quiete nelleconfigurazioni di equilibrio instabili 2 = (2n+1)", n " Z, e due diversi moti a meta asin-totica nell’intervallo !" < 2 < ". Le corrispondenti orbite sono eterocline, convergendoa 2 = !" e 2 = +" rispettivamente nel passato e nel futuro (e viceversa);
! se infine H(2,2) = E5, avendosi E5 > W (") = a, non sono presenti ne punti diinversione del moto ne mete asintotiche. Risultano definiti due soli moti, uno dei qualie indefinitamente progressivo (per velocita iniziale 2 > 0) e l’altro indefinitamenteretrogrado (per velocita iniziale di segno negativo).
In ogni caso, data la periodicita del potenziale (che ha periodo 2"), il ritratto di fase ecomposto da una infinita numerabile di striscie identiche del tipo
Sn := {(2, 2) " R2 : (2n ! 1)" ' 2 < (2n + 1)"} .
Stefano Siboni 2696
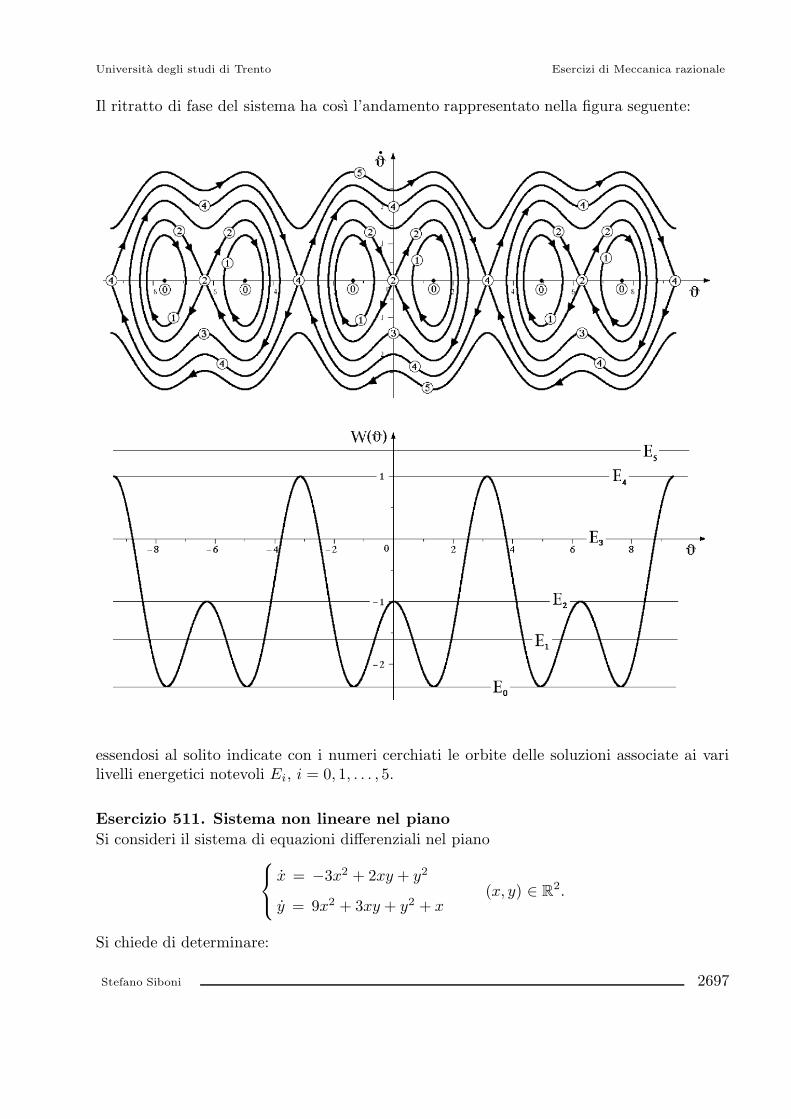
Universita degli studi di Trento Esercizi di Meccanica razionale
Il ritratto di fase del sistema ha cosı l’andamento rappresentato nella figura seguente:
essendosi al solito indicate con i numeri cerchiati le orbite delle soluzioni associate ai varilivelli energetici notevoli Ei, i = 0, 1, . . . , 5.
Esercizio 511. Sistema non lineare nel pianoSi consideri il sistema di equazioni di"erenziali nel piano
')
*x = !3x2 + 2xy + y2
y = 9x2 + 3xy + y2 + x(x, y) " R2.
Si chiede di determinare:
Stefano Siboni 2697

Universita degli studi di Trento Esercizi di Meccanica razionale
(a) i punti fissi (soluzioni costanti) del sistema;(b) le proprieta di stabilita dei punti fissi.
Soluzione(a) Punti fissiI punti fissi del sistema si ottengono ricercando le soluzioni (x, y) costanti e sono quindidefiniti dal sistema di equazioni algebriche
')
*!3x2 + 2xy + y2 = 0
9x2 + 3xy + y2 + x = 0 .(511.1)
Se x = 0 le due equazioni sono soddisfatte per y = 0. Un punto fisso ovvio e quindi dato da
(x, y) = (0, 0) .
Per x &= 0 la di"erenza membro a membro delle equazioni (511.1) porge
12x2 + xy + x = 0 1+ 12x + y + 1 = 0
in modo che il sistema delle equazioni di equilibrio diventa
')
*!3x2 + 2xy + y2 = 0
12x + y + 1 = 0 .
Dalla seconda equazione si ricava la y in funzione della x:
y = !12x ! 1
e questa relazione, sostituita nella prima condizione di equilibrio, conduce all’equazione nellasola x:
!3x2 + 2x(!12x ! 1) + (!12x ! 1)2 = 0
che debitamente semplificata si riduce a
117x2 + 22x + 1 = 0 .
Ne seguono le radici:
x =!22 ±
$222 ! 4 · 117
2 · 117=
!22±$
162 · 117
=!11 ± 2
117= 3
4
!13/117 = !1/9
!9/117 = !1/13
Stefano Siboni 2698

Universita degli studi di Trento Esercizi di Meccanica razionale
dalle quali si ricava, rispettivamente,
y = !1 ! 12$!1
9
%=
13
y = !1! 12$! 1
13
%= ! 1
13.
Si hanno cosı i due ulteriori punti fissi
(x, y) =$!1
9,13
%(x, y) =
$! 1
13,! 1
13
%.
(b) StabilitaPer analizzare la stabilita dei punti fissi conviene applicare il teorema di analisi lineare,introducendo la notazione seguente per i secondi membri delle equazioni di"erenziali
f(x, y) = !3x2 + 2xy + y2 g(x, y) = 9x2 + 3xy + y2 + x
e calcolando le relative derivate parziali prime:
.f
.x(x, y) = !6x + 2y
.f
.y(x, y) = 2x + 2y
.g
.x(x, y) = 18x + 3y + 1
.g
.y(x, y) = 3x + 2y
alle quali corrisponde la matrice jacobiana:
J(x, y) =+
! 6x + 2y 2x + 2y18x + 3y + 1 3x + 2y
,.
Punto fisso (x, y) = (0, 0)La matrice jacobiana del sistema in questo punto fisso e data da
J(0, 0) =+
0 01 0
,
ed ammette l’autovalore doppio , = 0. Il teorema di analisi lineare non e quindi applicabilee ricorre un caso critico di stabilita.
Punto fisso (x, y) = (!1/9, 1/3)Nella fattispecie si ha
J(!1/9, 1/3) =
/
001! 6
$!1
9
%+ 2
13
2$!1
9
%+ 2
13
18$!1
9
%+ 3
13
+ 1 3$!1
9
%+ 2
13
2
334 =+
4/3 4/90 1/3
,
e i relativi autovalori si ricavano dall’equazione caratteristica
0 = det[J(!1/9, 1/3)! ,I] =
!!!!!!
43! ,
49
013! ,
!!!!!!=$4
3! ,
%$13! ,
%
Stefano Siboni 2699

Universita degli studi di Trento Esercizi di Meccanica razionale
che fornisce, =
43
, =13
.
Entrambi gli autovalori sono reali e positivi, ma e noto che la presenza anche di un soloautovalore con parte reale positiva implica l’instabilita del punto fisso. Il punto fisso edunque instabile per il teorema di analisi lineare della stabilita.
Punto fisso (x, y) = (!1/13,!1/13)In questo caso la matrice jacobiana risulta
J(!1/13,!1/13) =
/
001(!6 + 2)
$! 1
13
%(2 + 2)
$! 1
13
%
18$! 1
13
%+ 3
$! 1
13
%+ 1 (3 + 2)
$! 1
13
%
2
334 =113
+4 !4!8 !5
,.
Per calcolarne gli autovalori ,, conviene porre , = µ/13 e scrivere l’equazione caratteristicanella forma semplificata
0 =!!!!4 ! µ !4!8 !5! µ
!!!! = (µ ! 4)(µ + 5) ! 32 = µ2 + µ ! 52
dalla quale si deducono le radici reali e di segno opposto
µ =!1 ±
$1 + 2082
=!1 ±
$209
2
ed i corrispondenti autovalori della jacobiana
,1 =!1 +
$209
26> 0 ,2 =
!1 !$
20926
< 0 .
Dato il ricorrere di un autovalore con parte reale positiva, il teorema di analisi lineare dellastabilita assicura l’instabilita del punto fisso.
Osservazione. Instabilita di (x, y) = (0, 0)L’instabilita del punto fisso (x, y) = (0, 0) puo essere provata ricorrendo direttamente alladefinizione. Basta osservare che:
(i) il sottoinsieme# = {(x, y) " R2 : y > x , x > 0} (511.2)
e invariante per il sistema (511.1), vale a dire che qualsiasi soluzione massimale concondizione iniziale in un punto di # ha l’intera orbita (nel futuro) contenuta in #;
(ii) il punto fisso (x, y) = (0, 0) e un punto di accumulazione (punto di limite) di #;
(iii) tutte le soluzioni massimali con condizione iniziale in # tendono all’infinito nel futuro.
Stefano Siboni 2700

Universita degli studi di Trento Esercizi di Meccanica razionale
Per dimostrare le a"ermazioni precedenti si individuano in primo luogo le regioni del piano(x, y) in cui le funzioni f(x, y) e g(x, y) presentano segno definito. La funzione f(x, y) e unafunzione quadratica indefinita, dal momento che
f(x, y) = !3x2 + 2xy + y2 = (x y)+!3 11 1
,+xy
,:= (x y)A
+xy
,
e la matrice di rappresentazione A ha determinante (!3) · 1 ! 1 · 1 = !4 < 0 e dunqueautovalori di segno opposto. Trattandosi di una forma quadratica, la f(x, y) deve assumerelo stesso segno in tutti i punti (x, y) &= (0, 0) allineati lungo una retta assegnata a piacere.Tale segno e chiaramente positivo per i punti dell’asse y:
f(0, y) = y2 > 0 % y " R \ {0}
mentre lungo una generica retta di coe!ciente angolare k " R si ha
f(x, kx) = !3x2 + 2kx2 + k2x2 = (k2 + 2k ! 3)x2 %x " R \ {0}
e il segno della funzione risulta determinato unicamente da quello del trinomio k2 + 2k ! 3.L’espressione e quindi nulla se e soltanto se k2 + 2k ! 3 = 0, ossia
k =!2 ±
54 ! 4(!3)2
=!2 ± 4
2= !1 ± 2 = 3
4
1
!3
assumendo segno negativo per !3 < k < 1 e positivo per k < !3 o k > 1. Le regioni in cuila funzione f(x, y) assume segno positivo o negativo sono evidenziate nella figura seguente
Come appare evidente, le regioni in questione sono coni del piano con vertice nell’origine.Si osservi come allo stesso risultato si possa pervenire anche per mezzo dell’identita:
f(x, y) = !3x2 + 2xy + y2 = (y + 3x)(y ! x) % (x, y) " R2
Stefano Siboni 2701

Universita degli studi di Trento Esercizi di Meccanica razionale
dalla quale segue immediatamente che l’equazione f(x, y) = 0 individua una conica degeneredel piano — ossia la coppia di rette y = !3x e y = x.Anche la funzione g(x, y) e un polinomio di secondo grado delle variabili x, y e i suoi zeridevono definire una conica nel piano Oxy. Poiche la funzione puo esprimersi nella forma
g(x, y) = (x y)+
9 3/23/2 1
,+xy
,+ x = (x y)B
+xy
,+ x
con la matrice di rappresentazione B definita positiva a causa del segno positivo di determi-nante e traccia
det(B) = 9 · 1 ! (3/2)2 = 27/4 > 0 tr(B) = 9 + 1 = 10 > 0 ,
la curva g(x, y) = 0 — se reale — puo essere soltanto un’ellisse E. In e"etti, posto x = xo++,y = yo + 0, l’equazione della conica assume la forma
9x2o + 9+2 + 18xo+ + 3(xo + +)(yo + 0) + y2
o + 02 + 2yo0 + xo + + = 0
ossia, riordinando i termini,
9+2 + 3+0 + 02 + (18xo + 3yo + 1)+ + (3xo + 2yo)0 + 9x2o + 3xoyo + y2
o + xo = 0
e fissando le costanti xo, yo in modo che si abbia
18xo + 3yo + 1 = 0 3xo + 2yo = 0 , (511.3)
essa si riduce a9+2 + 3+0 + 02 + 9x2
o + 3xoyo + y2o + xo = 0 . (511.4)
Nella fattispecie, le equazioni lineari (511.3) porgono l’unica soluzione
xo = ! 227
yo =19
,
in modo che l’equazione (511.4) diventa
9+2 + 3+0 + 02 = !9x2o ! 3xoyo ! y2
o ! xo =
= !9$! 2
27
%2! 3
$! 2
27
%19!$1
9
%2!$! 2
27
%=
127
.(511.5)
Gli autovalori della matrice B si desumono dall’equazione caratteristica
0 = det(B ! ,I) =!!!!9 ! , 3/23/2 1 ! ,
!!!! = (, ! 9)(, ! 1) ! 94
= ,2 ! 10, +274
che da le radici positive
, =12
$10 ±
"100 ! 4 · 27
4
%= 5 ± 1
2$
73 .
Stefano Siboni 2702

Universita degli studi di Trento Esercizi di Meccanica razionale
Gli autovettori associati all’autovalore ,1 = 5 +12$
73 sono le soluzioni non banali del siste-ma lineare omogeneo
(B ! ,1I)+
a1
b1
,= 0
che avendosi
B ! ,1I =
/
19 ! 5 ! 1
2$
7332
32
1 ! 5 ! 12$
73
2
4 =12
+8 !
$73 3
3 !8!$
73
,,
si esprime nella forma equivalente')
*(8 !
$73)a1 + 3b1 = 0
3a1 ! (8 +$
73)b1 = 0
e porge la famiglia di soluzioni non banali individuate da
b1 =$
73 ! 83
a1 % a1 " R \ {0} .
Un autovettore associato a ,1 si ricava dunque ponendo ad esempio a1 = 3
*v1 = 3 e1 + ($
73 ! 8) e2 .
In modo analogo si prova che un autovettore relativo all’autovalore ,2 = 5 ! 12$
73 risulta
*v2 = 3 e1 ! ($
73 + 8) e2 .
L’ellisse E ha dunque centro nel punto C specificato dal vettore posizione
C ! O = xo e1 + yo e2 = ! 227
e1 +19
e2
e gli assi diretti secondo gli autovettori ortogonali
*v1 = 3 e1 + ($
73! 8) e2 e *v2 = 3 e1 ! ($
73 + 8) e2 .
L’ellisse passa chiaramente per l’origine, in quanto g(0, 0) = 0. Nello stesso punto la conicae tangente all’asse Oy, dal momento che
.g
.x(0, 0) = (18x + 3y + 1)
!!!!(x,y)=(0,0)
= 1
Stefano Siboni 2703
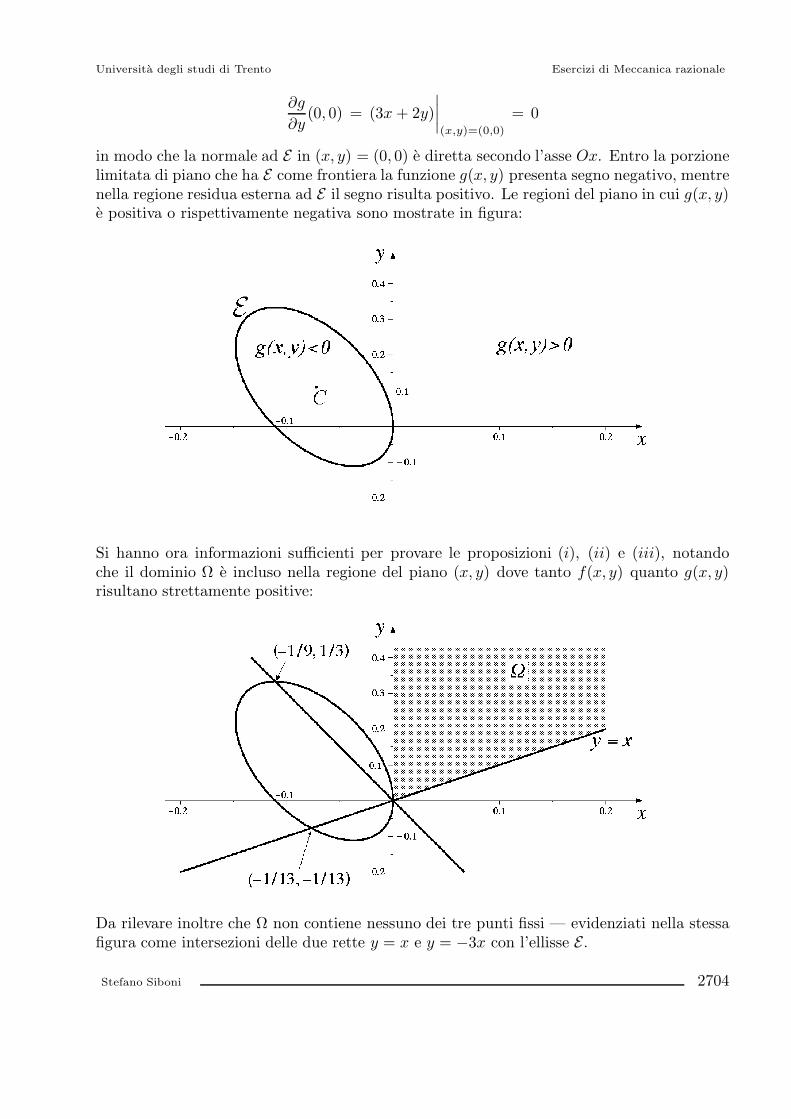
Universita degli studi di Trento Esercizi di Meccanica razionale
.g
.y(0, 0) = (3x + 2y)
!!!!(x,y)=(0,0)
= 0
in modo che la normale ad E in (x, y) = (0, 0) e diretta secondo l’asse Ox. Entro la porzionelimitata di piano che ha E come frontiera la funzione g(x, y) presenta segno negativo, mentrenella regione residua esterna ad E il segno risulta positivo. Le regioni del piano in cui g(x, y)e positiva o rispettivamente negativa sono mostrate in figura:
Si hanno ora informazioni su!cienti per provare le proposizioni (i), (ii) e (iii), notandoche il dominio # e incluso nella regione del piano (x, y) dove tanto f(x, y) quanto g(x, y)risultano strettamente positive:
Da rilevare inoltre che # non contiene nessuno dei tre punti fissi — evidenziati nella stessafigura come intersezioni delle due rette y = x e y = !3x con l’ellisse E.
Stefano Siboni 2704

Universita degli studi di Trento Esercizi di Meccanica razionale
(i) L’insieme # definito da (511.2) e invariante per il sistema di equazioni di"erenziali.Basta osservare che lungo la frontiera di # risulta
f(x, x) = !3x2 + 2x2 + x2 = 0
g(x, x) = 9x2 + 3x2 + x2 + x = 13x2 + x > 0%x > 0 ,
sul tratto y = x, x > 0, ef(0, y) = y2 > 0
g(0, y) = y2 > 0% y > 0
sul semiasse Oy positivo, in modo che l’andamento del campo vettoriale (f, g) lungo lafrontiera di # e quello riportato in figura
e risulta ovunque diretto verso l’interno di #. Cio garantisce che qualunque soluzione mas-simale con dato iniziale in # rimane confinata indefinitamente (nel futuro) entro lo stessoinsieme #, che risulta dunque invariante. L’asserto si prova facilmente per assurdo.
Indicato con (xo, yo) un generico punto di # e con (x(t), y(t)) la corrispondente soluzionemassimale di condizione iniziale (x(0), y(0)) = (xo, yo), la tesi e che % (xo, yo) " # siabbia (x(t), y(t)) " # % t > 0 sul quale la soluzione massimale e definita. Si suppongaallora, per assurdo, che esistano un dato iniziale (xo, yo) " # ed un istante t > 0 percui (x(t), y(t)) /" #. La continuita della soluzione implica allora che debba esistere unistante t) > 0 in corrispondenza del quale la soluzione attraversa la frontiera .# di #una prima volta. Deve aversi (x(t)), y(t))) &= (0, 0), perche (x, y) = (0, 0) e un puntofisso e ne deriverebbe una contraddizione con il teorema di esistenza ed unicita — leorbite di due soluzioni certamente distinte si intersecherebbero nell’origine. Possonopercio darsi due soli casi: o il punto (x(t)), y(t))) appartiene al semiasse Oy positivo,oppure lo stesso punto si colloca lungo la bisettrice y = x, x > 0.
Stefano Siboni 2705

Universita degli studi di Trento Esercizi di Meccanica razionale
. x(t)) = 0, y(t)) > 0.In questo caso, per ogni t, 0 < t < t) deve aversi
x(t) > 0 1+ x(t)) ! x(t) < 0 1+ x(t)) ! x(t)t) ! t
< 0
e quindi
limt$t!!
x(t)) ! x(t)t) ! t
' 0
il che, per l’ovvia derivabilita della soluzione, equivale alla condizione
x(t)) ' 0
che pero contrasta con quanto prescritto dall’equazione di"erenziale
x(t)) = f(x(t)), y(t))) = f(0, y(t))) = y(t))2 > 0
conducendo cosı ad un assurdo.
. y(t)) = x(t)) > 0. Nella fattispecie, per ogni t compreso fra 0 e t) deve risultare
y(t) > x(t) 1+ y(t)) ! y(t) < x(t)) ! x(t)
per cuiy(t)) ! y(t)
t) ! t<
x(t)) ! x(t)t) ! t
e quindi
y(t)) = limt$t!!
y(t)) ! y(t)t) ! t
' limt$t!!
x(t)) ! x(t)t) ! t
= x(t))
in modo che, usando le equazioni di"erenziali,
g(x(t)), y(t))) ' f(x(t)), y(t))) ,
ossiag(x(t)), x(t))) ' f(x(t)), x(t))) .
Quest’ultima condizione si riduce a
13x(t))2 + x(t)) ' 0
e costituisce un assurdo, dal momento che x(t)) > 0.
(ii) L’origine (x, y) = (0, 0) costituisce un punto di accumulazione di #.
Stefano Siboni 2706

Universita degli studi di Trento Esercizi di Meccanica razionale
L’a"ermazione e ovvia, dal momento che l’origine puo riguardarsi, ad esempio, come puntodi accumulazione della successione di #:
(xn, yn) =$ 1
n + 1,1n
%%n = 1, 2, . . .
(iii) Tutte le soluzioni massimali con dato iniziale in # tendono all’infinito nel futuro.Qualunque soluzione massimale (x(t), y(t)) in #, definita su un intervallo aperto J , soddisfale condizioni
x(t) = f(x(t), y(t)) > 0 y(t) = g(x(t), y(t)) > 0
per cui entrambe le funzioni x(t) e y(t) sono monotone crescenti in J . Una possibilita e chealmeno una delle funzioni x(t), y(t) tenda all’infinito al crescere di t " J .(1) In alternativa,entrambe le funzioni x(t) e y(t) convergono a limiti finiti x% e y% rispettivamente, con ilpunto (x%, y%) compreso nella chiusura # di # e distinto da (x, y) = (0, 0). In tal caso,il teorema di prolungabilita assicura che l’intervallo J debba essere superiormente limitato,per cui
limt$+%
x(t) = x% limt$+%
y(t) = y% . (511.6)
E allora facile vedere che
f(x% , y%) = 0 g(x%, y%) = 0 (511.7)
arrivando cosı alla conclusione assurda che la chiusura di # contiene un punto fisso distintodall’origine. Per dimostrare come dalle (511.6) possano seguire le (511.7) ci si puo valere diun lemma generale.
LemmaSi consideri il sistema di equazioni di"erenziali del primo ordine in forma normale
z = f(z)
con z " Rn e f : D!!!!*Rn funzione C1 nell’aperto D , Rn. Sia z(t) una soluzionemassimale dell’equazione di"erenziale che converge nel futuro ad un limite finito zo " D. Siha allora che
f(zo) = 0
per cui zo costituisce necessariamente un punto fisso del sistema.
DimostrazionePer il teorema di prolungabilita la soluzione massimale z(t) deve essere definita su un inter-vallo di tempo superiormente limitato, per cui
limt$+%
z(t) = zo .
(1) dalla forma di ! appare chiaro che y(t)$+% se x(t)$+%, ma non e necessariamente vero il viceversa
Stefano Siboni 2707

Universita degli studi di Trento Esercizi di Meccanica razionale
Si supponga, per assurdo, che f(zo) &= 0. Dovra allora esistere una componente di f(zo) di-versa da zero, per esempio la componente i-esima fi(zo), e senza alcuna perdita di generalitasi potra assumere che
fi(zo) > 0 ,
il caso fi(zo) < 0 essendo trattabile in modo analogo. Poiche z(t) * zo per t * +) efi(z) e una funzione continua, per ogni 1 > 0 abbastanza piccolo esistera un istante t) taleche % t ( t) risulta
fi(z(t)) > fi(zo) ! 1 ,
in modo che, scelto 1 < fi(zo), si avra
zi(t) = fi(z(t)) > fi(zo) ! 1 > 0 % t ( t) .
Non rimane che integrare membro a membro la disequazione ottenuta fra t) e un genericot > t) per ottenere
t6
t!
zi($ )d$ =t6
t!
fi(z($ ))d$ >
t6
t!
[fi(zo) ! 1] d$ % t ( t)
e dunquezi(t) ! zi(t)) > [fi(zo) ! 1](t ! t)) % t ( t)
che nel limite conduce alla contraddizione
zoi ! zi(t)) ( lim
t$+%[fi(zo) ! 1](t ! t)) = +) ,
essendo zoi la componente i-esima di zo. Il caso di fi(zo) < 0 si discute in modo analogo,
scegliendo un 1 positivo tale che 1 < |fi(zo)| e un corrispondente t) > 0 in modo che si abbia
zi(t) < fi(zo) + 1 < 0 .
Si conclude che, necessariamente, deve risultare fi(zo) = 0 e che, per l’arbitrarieta dellacomponente i-esima considerata, f(zo) = 0. La prova e completa.
Vale la pena di notare, benche l’osservazione non sia essenziale allo studio della stabilita,che per qualsiasi soluzione massimale (x(t), y(t)) in # e definita su un intervallo di temposuperiormente limitato. Per verificarlo, si ponga x(0) = xo, y(0) = yo e si consideri lungo lasoluzione (x(t), y(t)) la disequazione
y = 9x2 + 3xy + y2 + x > 9x2o + 3xoy + y2 + xo > 9x2
o + y2 (511.8)
valida — essendo x(t) > 0, y(t) > 0 e x(t) strettamente crescente — per ogni t > 0dell’intervallo J su cui e definita la soluzione massimale. Dalla (511.8) segue allora:
19x2
o + y2
dy
dt> 1 1+ 1
1 +y2
9x2o
d
dt
$ y
3xo
%> 3xo
Stefano Siboni 2708

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia, riesprimendo il primo membro come un’unica derivata,
d
dt
-arctg
$ y
3xo
%.> 3xo
e quindi, integrando fra t = 0 e un generico t > 0, t " J :
arctg$y(t)
3xo
%! arctg
$ yo
3xo
%> 3xot .
Ne deriva chearctg
$y(t)3xo
%> arctg
$ yo
3xo
%+ 3xot % t " J , t > 0 ,
per cui deve aversi necessariamente
"
2> arctg
$ yo
3xo
%+ 3xot 1+ 1
3xo
-"
2! arctg
$ yo
3xo
%.> t % t " J , t > 0 .
L’intervallo J risulta percio superiormente limitato, con
supJ ' 13xo
-"
2! arctg
$ yo
3xo
%..
In tal modo la prova del punto (iii) puo dirsi completa.
Prova dell’instabilita di (x, y) = (0, 0)Qualsiasi sfera aperta B(3) con centro (x, y) = (0, 0) presenta sempre intersezione nonvuota con l’insieme #. Una qualunque condizione iniziale (xo, yo) " B(3)2# genera dunqueuna soluzione che tende all’infinito ed esce percio da una qualsivoglia sfera prefissata B(1)centrata nell’origine a patto di attendere un intervallo di tempo adeguatamente lungo.La definizione di stabilita non puo quindi essere soddisfatta e cio equivale a riconoscerel’instabilita del punto fisso.
Osservazione. Ritratto di fase qualitativo del sistemaL’andamento qualitativo delle orbite nel piano Oxy puo essere determinato facendo uso delleinformazioni seguenti:
. i tre punti fissi (x, y) = (0, 0), (!1/9, 1/3), !1/13,!1/13 del sistema si trovano all’in-tersezione fra l’ellisse E e le rette y = x, y = !3x;
. come gia evidenziato dall’analisi di stabilita, la matrice jacobiana del sistema in (x, y) =(!1/9, 1/3) presenta due autovalori positivi distinti. Il punto fisso e quindi un nodoinstabile non degenere (unstable nondegenerate node);
. analogamente, la matrice jacobiana del sistema nel punto fisso (x, y) = (!1/13,!1/13)ammette due autovalori reali di segno opposto, che qualificano il punto fisso come puntodi sella (saddle point);
Stefano Siboni 2709

Universita degli studi di Trento Esercizi di Meccanica razionale
. il punto fisso (x, y) = (0, 0) ha matrice jacobiana con autovalore zero doppio. Nullapuo dirsi circa l’andamento delle soluzioni nell’intorno dell’origine. Nondimeno, si e giaprovato che il punto fisso risulta instabile;
. nel dominio ellittico delimitato da E la componente y di qualunque soluzione deve essereuna funzione decrescente. Al di fuori di questa regione (esclusa E) la y cresce nel tempo;
. le rette y = x e y = !3x dividono il piano Oxy in quattro quadranti di diversa ampiezza,disposti al di sopra, al di sotto, a destra e a sinistra dell’origine O. Nei due quadrantilaterali la componente x di ogni soluzione e funzione decrescente del tempo, mentre neiquadranti superiore ed inferiore la x e crescente.
Il ritratto di fase del sistema assume allora la forma descritta nella figura seguente:
nella quale si sono evidenziati l’ellisse E, la retta y = x, la retta y = !3x e i punti fissi allerelative intersezioni.
Esercizio 512. Sistema non lineare nel pianoDato il sistema di equazioni di"erenziali non lineari nel piano (x, y) " R2:
Dx = x + y + 3y = 3x ! y + xy ! 1 ,
determinare:
(a) tutti i punti fissi del sistema;(b) le proprieta di stabilita dei predetti punti fissi.
Stefano Siboni 2710

Universita degli studi di Trento Esercizi di Meccanica razionale
Soluzione(a) Punti fissiI punti fissi del sistema sono le soluzioni costanti del sistema di equazioni di"erenziali e siidentificano percio con le soluzioni (x, y) del sistema algebrico non lineare:
Dx + y + 3 = 03x ! y + xy ! 1 = 0 .
(512.1)
Dalla prima equazione (lineare) si ricava la relazione
y = !x ! 3 (512.2)
che trasforma la seconda equazione (512.1) in
3x + x + 3 + x(!x ! 3) ! 1 = 0
e porge infinex2 ! x ! 2 = 0 .
Ne seguono le radici
x =1 ±
51 ! 4(!2)2
=1± 3
2= 3
4
2
!1
e usando la (512.2) si ottengono i punti fissi:
(x, y) = (2,!5) (x, y) = (!1,!2) .
(b) Analisi di stabilita dei punti fissiPosto per brevita
f(x, y) = x + y + 3 g(x, y) = 3x ! y + xy ! 1
le derivate parziali prime dei secondi membri delle (512.1) si scrivono:
.f
.x(x, y) = 1
.f
.y(x, y) = 1
.g
.x(x, y) = 3 + y
.g
.y(x, y) = !1 + x
per cui la matrice jacobiana del secondo membro di (512.1) diventa
J(x, y) =+
1 13 + y !1 + x
,.
Stefano Siboni 2711

Universita degli studi di Trento Esercizi di Meccanica razionale
Punto fisso (x, y) = (2,!5)In questo caso si ha la matrice jacobiana
J(2,!5) =+
1 13 ! 5 !1 + 2
,=+
1 1!2 1
,
con l’equazione caratteristica associata
0 = det[J(2,!5)! ,I] =!!!!1 ! , 1!2 1 ! ,
!!!! = (, ! 1)2 + 2
dalla quale si ricavano gli autovalori complessi coniugati:
,1 = 1 + i$
2 ,2 = 1 ! i$
2 .
Poiche esiste un autovalore con parte reale positiva (in e"etti entrambi gli autovalori hannoparte reale positiva), si conclude che il punto fisso e instabile secondo Liapunov per il teoremadi analisi lineare della stabilita. In e"etti, il ricorrere di due autovalori complessi coniugaticon parte reale positiva consente di a"ermare che il punto fisso costituisce un fuoco instabile(unstable focus).
Punto fisso (x, y) = (!1,!2)Nella fattispecie la matrice jacobiana diventa
J(!1,!2) =+
1 13 ! 2 !1 ! 1
,=+
1 11 !2
,
e la sua equazione caratteristica assume la forma
0 = det[J(!1,!2) ! ,I] =!!!!1 ! , 1
1 !2 ! ,
!!!! = (, ! 1)(, + 2) ! 1 = ,2 + , ! 3
con radici reali di segno opposto:
, =!1 ±
51 ! 4(!3)2
=!1 ±
$13
2
ossia
,1 =!1 +
$13
2> 0 ,2 =
!1 !$
132
< 0 .
Poiche :e(,1) > 0, il teorema di analisi lineare della stabilita assicura l’instabilita del puntofisso; precisamente, data la presenza di autovalori reali di segno opposto, si tratta di unpunto di sella (saddle point).
Stefano Siboni 2712
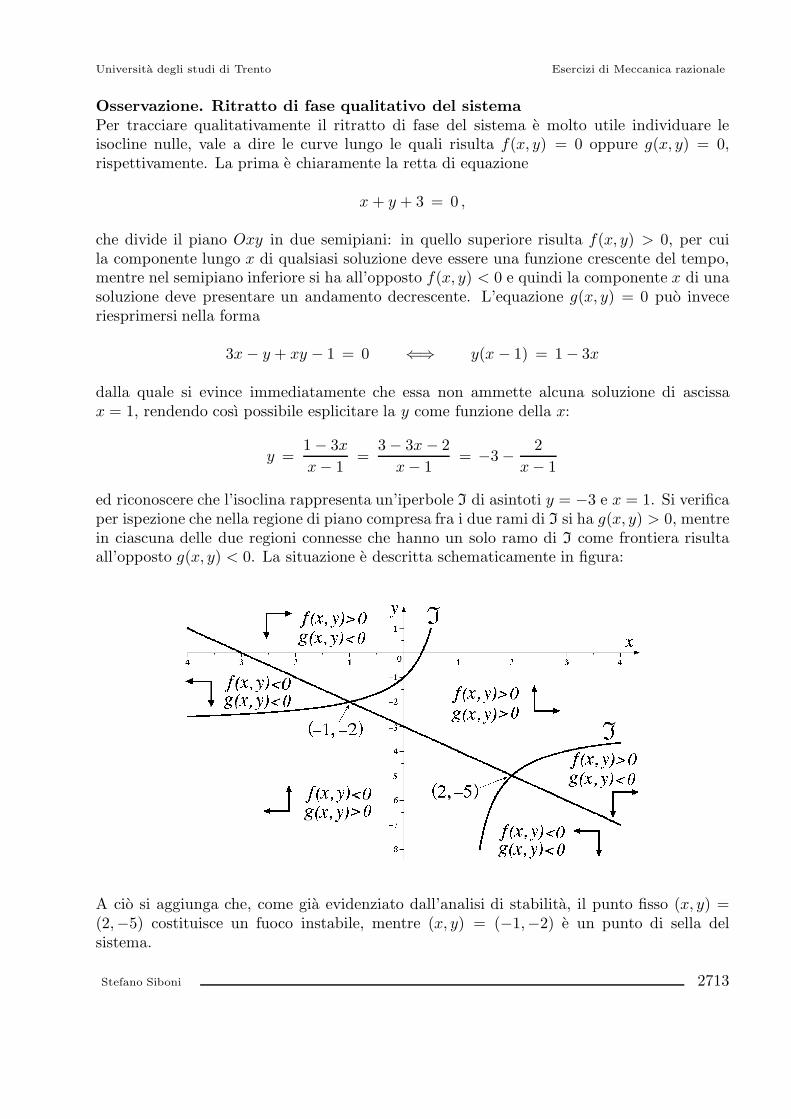
Universita degli studi di Trento Esercizi di Meccanica razionale
Osservazione. Ritratto di fase qualitativo del sistemaPer tracciare qualitativamente il ritratto di fase del sistema e molto utile individuare leisocline nulle, vale a dire le curve lungo le quali risulta f(x, y) = 0 oppure g(x, y) = 0,rispettivamente. La prima e chiaramente la retta di equazione
x + y + 3 = 0 ,
che divide il piano Oxy in due semipiani: in quello superiore risulta f(x, y) > 0, per cuila componente lungo x di qualsiasi soluzione deve essere una funzione crescente del tempo,mentre nel semipiano inferiore si ha all’opposto f(x, y) < 0 e quindi la componente x di unasoluzione deve presentare un andamento decrescente. L’equazione g(x, y) = 0 puo inveceriesprimersi nella forma
3x ! y + xy ! 1 = 0 1+ y(x ! 1) = 1 ! 3x
dalla quale si evince immediatamente che essa non ammette alcuna soluzione di ascissax = 1, rendendo cosı possibile esplicitare la y come funzione della x:
y =1 ! 3x
x ! 1=
3 ! 3x ! 2x ! 1
= !3 ! 2x ! 1
ed riconoscere che l’isoclina rappresenta un’iperbole I di asintoti y = !3 e x = 1. Si verificaper ispezione che nella regione di piano compresa fra i due rami di I si ha g(x, y) > 0, mentrein ciascuna delle due regioni connesse che hanno un solo ramo di I come frontiera risultaall’opposto g(x, y) < 0. La situazione e descritta schematicamente in figura:
A cio si aggiunga che, come gia evidenziato dall’analisi di stabilita, il punto fisso (x, y) =(2,!5) costituisce un fuoco instabile, mentre (x, y) = (!1,!2) e un punto di sella delsistema.
Stefano Siboni 2713
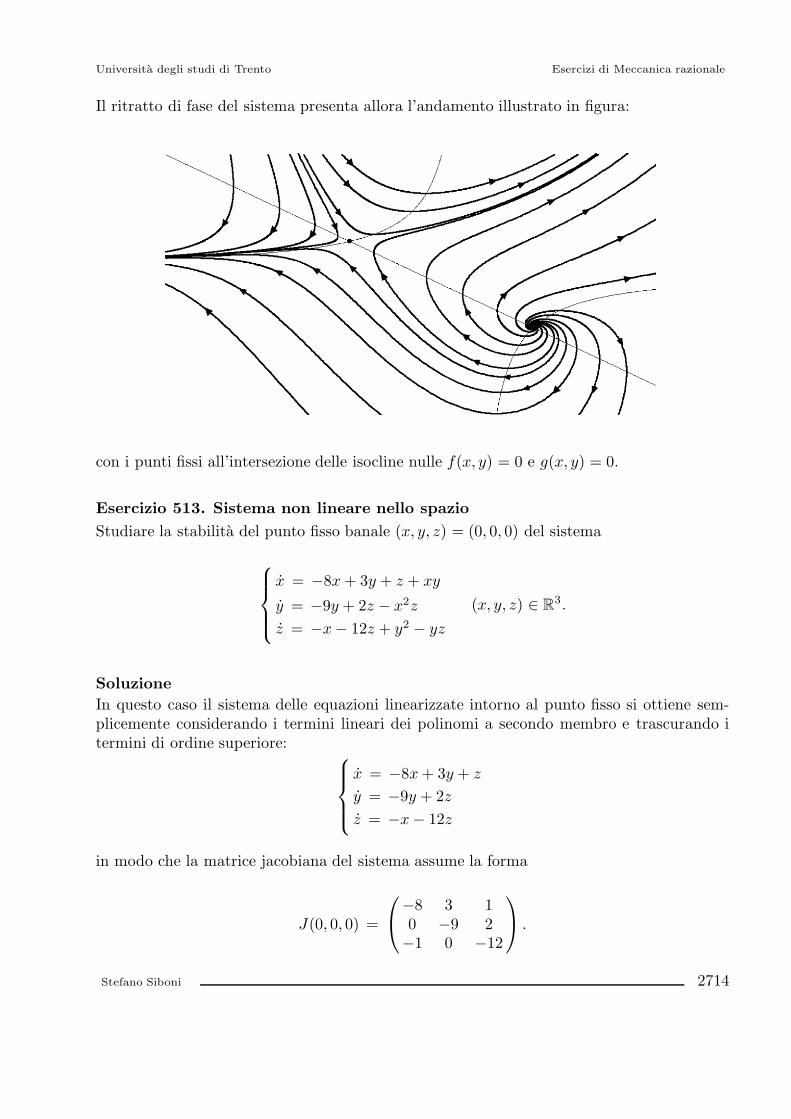
Universita degli studi di Trento Esercizi di Meccanica razionale
Il ritratto di fase del sistema presenta allora l’andamento illustrato in figura:
con i punti fissi all’intersezione delle isocline nulle f(x, y) = 0 e g(x, y) = 0.
Esercizio 513. Sistema non lineare nello spazioStudiare la stabilita del punto fisso banale (x, y, z) = (0, 0, 0) del sistema
'(()
((*
x = !8x + 3y + z + xy
y = !9y + 2z ! x2z
z = !x ! 12z + y2 ! yz
(x, y, z) " R3.
SoluzioneIn questo caso il sistema delle equazioni linearizzate intorno al punto fisso si ottiene sem-plicemente considerando i termini lineari dei polinomi a secondo membro e trascurando itermini di ordine superiore:
'(()
((*
x = !8x + 3y + z
y = !9y + 2z
z = !x ! 12z
in modo che la matrice jacobiana del sistema assume la forma
J(0, 0, 0) =
/
1!8 3 10 !9 2!1 0 !12
2
4 .
Stefano Siboni 2714

Universita degli studi di Trento Esercizi di Meccanica razionale
A questa e associata l’equazione caratteristica
0 = det[J(0, 0, 0) ! ,I] =
!!!!!!
!8 ! , 3 10 !9 ! , 2!1 0 !12! ,
!!!!!!=
= (!8 ! ,)!!!!!9! , 2
0 !12 ! ,
!!!!+ (!1)!!!!
3 1!9 ! , 2
!!!! =
= (!8 ! ,)(!9 ! ,)(!12 ! ,) ! 6 ! 9 ! , =
= !(,3 + 29,2 + 277, + 879)
che cambiando tutti i segni a secondo membro diventa
,3 + 29,2 + 277, + 879 = 0 .
Indicato con P (,) il polinomio a primo membro, e facile verificare che esso presenta il graficoseguente:
L’unica radice reale puo essere determinata analiticamente ricorrendo alle formule di Car-dano, o piu semplicemente per via numerica (usando per esempio il metodo di Newton-Raphson):
, = !12.20701168 .
La regola di Ru!ni consente allora di fattorizzare approssimativamente P (,) nella forma
P (,) = (, + 12.20701168)(,2 + 16.79298832, + 72.0077954)
dove il trinomio di secondo grado ammette due radici complesse coniugate con parte realenegativa:
, = !8.396494160 + 1.227469438 i , = !8.396494160! 1.227469438 i .
In definitiva, gli autovalori della matrice jacobiana hanno tutti parte reale negativa
,1 = !12.20701168 ,2 = !8.396494160 + 1.227469438 i
Stefano Siboni 2715

Universita degli studi di Trento Esercizi di Meccanica razionale
,3 = !8.396494160! 1.227469438 i
e permettono di concludere che il punto fisso e asintoticamente stabile per il teorema dianalisi lineare della stabilita.
Osservazione. Soluzione con il criterio di HurwitzLa stabilita asintotica del punto fisso e stata provata determinando numericamente gli au-tovalori della matrice jacobiana e constatando che le relative parti reali sono tutte negative.In realta, il calcolo esplicito degli autovalori non e strettamente necessario per giungere alrisultato. I polinomi reali le cui radici siano tutte con parte reale negativa sono infatti com-pletamente caratterizzati dal criterio di Hurwitz, in quale a"erma che il polinomio di gradon
P (,) = a0,n + a1,
n!1 + . . . + an!1, + an
con ao > 0 e ai " R % i = 1, . . . , n ha tutte le radici con parte reale negativa se e soltanto setutti i minori fondamentali %1,%2, . . . ,%n della matrice di Hurwitz
Hn =
/
000000001
a1 a3 a5 a7 . . . 0 0a0 a2 a4 a6 . . . 0 00 a1 a3 a5 . . . 0 00 a0 a2 a4 . . . 0 0...
......
.... . .
......
0 0 0 0 . . . an!1 00 0 0 0 . . . an!2 an
2
333333334
(513.1)
sono positivi. La matrice (513.1) si ottiene assegnando preliminarmente i valori a1, a2, . . .,an agli elementi della diagonale principale; lungo ciascuna colonna, muovendo dall’elementodiagonale corrispondente, ci si sposta verso l’alto inserendo i valori ai con indici i = 0, 1 . . . , ncrescenti e verso il basso assegnando gli stessi valori con indici i = 0, 1 . . . , n decrescenti, conla convenzione che sia ai = 0 per i < 0 o i > n.Cosı, per un polinomio di terzo grado a coe!cienti reali
a0,3 + a1,
2 + a2, + a3
in cui sia a0 > 0, la matrice di Hurwitz assume la forma
H3 =
/
1a1 a3 0a0 a2 00 a1 a3
2
4
e la condizione necessaria e su!ciente a!nche tutte le tre radici abbiano parte reale negativae data dalle tre disequazioni simultanee:
%1 = a1 > 0 %2 = det+
a1 a3
a0 a2
,> 0 %3 = det
/
1a1 a3 0a0 a2 00 a1 a3
2
4 > 0 .
Stefano Siboni 2716

Universita degli studi di Trento Esercizi di Meccanica razionale
Nella fattispecie, il polinomio da esaminare eP (,) = ,3 + 29,2 + 277, + 879
con coe!cientia0 = 1 a1 = 29 a2 = 277 a3 = 879
e matrice di Hurwitz
H3 =
/
1a1 a3 0a0 a2 00 a1 a3
2
4 =
/
129 879 01 277 00 29 879
2
4
i cui minori fondamentali sono dati da
%1 = 29 > 0 %2 =!!!!29 8791 277
!!!! = 7154 > 0
%3 =
!!!!!!
29 879 01 277 00 29 879
!!!!!!= %2 · 879 > 0 .
I segni positivi di %1, %2 e %3 autorizzano a concludere che il polinomio ha tutte le radicicon parte reale negativa, come gia verificato per via numerica.
Esercizio 514. Oscillatore armonico smorzato con forzante sinusoidaleNel piano cartesiano Oxy un telaio quadrato HLMN , di lato 2R, ha i punti medi A e Bdei lati LH ed MN vincolati a scorrere lungo l’asse verticale Oy. Il lato MN striscia su undisco D, di centro C e raggio R, che ruota con velocita angolare # costante attorno al puntoO del suo bordo. Una molla ideale di costante elastica k collega A ad un punto materiale Pdi massa m che puo scorrere liberamente lungo Oy. Oltre al peso, su P agisce una resistenzaviscosa con costante di frizione (.
Stefano Siboni 2717

Universita degli studi di Trento Esercizi di Meccanica razionale
Assunti i vincoli ideali, si usi la coordinata libera s " R in figura per determinare del sistema:
(a) le equazioni pure del moto;(b) l’ampiezza di oscillazione del moto per t 7 0;(c) il valore di # per cui si ha risonanza del sistema.
Soluzione(a) Equazioni pure del motoIl sistema e reonomo e a vincoli ideali e le sue equazioni del moto si possono esprimere informa lagrangiana. Le sollecitazioni applicate al punto P sono il peso, l’interazione elasticacon il punto A e la resistenza viscosa: di esse occorre determinare la relativa componentegeneralizzata. A questo scopo sono fondamentali le espressioni del vettore posizione di Pnel riferimento Oxy
P ! O = (R sin#t + R + 2R ! Rs) e2 = R(sin #t + 3 ! s) e2 , (514.1)
della corrispondente velocita assoluta
P = R(# cos #t ! s) e2
e della derivata parziale rispetto al parametro lagrangiano
.P
.s= !R e2 .
La relazione (514.1) si ricava immediatamente notando che per ipotesi il segmento MN deltelaio deve mantenersi costantemente tangente al bordo di D, ad una distanza dal centroC pari percio a al raggio R. La componente generalizzata della forza peso puo calcolarsidirettamente dalla definizione
Qgs = !mg e2 ·
.P
.s= !mg e2 · (!R e2) = mgR.
Per la sollecitazione elastica conviene invece calcolare il potenziale associato
Uel = !k
2|P !A|2 = !k
2|Rs e2|2 = !kR2
2s2
e derivarlo rispetto al parametro lagrangiano
Qels =
.Uel
.s= !kR2s ,
mentre per la resistenza viscosa si ha infine
Qrvs = !(P · .P
.s= !(R(# cos #t ! s) e2 · (!R e2) = !(R2s + (R2# cos #t .
Stefano Siboni 2718

Universita degli studi di Trento Esercizi di Meccanica razionale
La determinazione dell’unica equazione di Lagrange
d
dt
$.T
.s
%! .T
.s= Qg
s + Qels + Qrv
s
richiede il calcolo dell’energia cinetica di P :
T =m
2P 2 =
m
2!!R(# cos #t ! s) e2
!!2 =mR2
2(s ! # cos #t)2
dalla quale si deducono le espressioni:
.T
.s= mR2(s ! # cos #t)
.T
.s= 0
d
dt
$.T
.s
%= mR2(s + #2 sin#t) .
Le equazioni del moto sono pertanto
mR2(s + #2 sin #t) = mgR! kR2s ! (R2s + (R2# cos #t
e semplificando il fattore R2 acquistano la forma
ms + m#2 sin#t =mg
R! ks ! (s + (# cos #t
che portando a primo membro tutti i termini in s diventa
ms + (s + ks =mg
R! m#2 sin#t + (# cos #t . (514.2)
(b) Ampiezza di oscillazione del moto per t 7 0Con la sostituzione
s =mg
kR+ +
il termine costante a secondo membro della (514.2) viene rimosso e l’equazione del moto siriduce a
m+ + (+ + k+ = !m#2 sin #t + (# cos #t . (514.3)
Il secondo membro dell’equazione e una combinazione lineare delle funzioni sin#t e cos #t,e puo quindi riesprimersi come un’unica sinusoide di pulsazione #. La soluzione genera-le dell’equazione di"erenziale non omogenea si ottiene sommando alla soluzione generaledell’equazione omogenea associata una soluzione particolare del tipo
+ = A cos(#t + ') (514.4)
con A > 0 e ' costanti reali opportune. Si ricorda che la soluzione generale dell’equazioneomogenea associata converge esponenzialmente a zero per t * +) e rappresenta il mototransiente del sistema. Alla soluzione particolare (514.4) corrisponde cosı il moto di regime
Stefano Siboni 2719

Universita degli studi di Trento Esercizi di Meccanica razionale
del sistema, che descrive il comportamento di questo per t 7 0. Si tratta percio di deter-minare l’ampiezza A della soluzione sinusoidale (514.4). Sostituendo la (514.4), l’equazionedel moto (514.3) diventa
A7(k ! m#2) cos(#t + ') ! (# sin(#t + ')
8= !m#2 sin#t + (# cos #t
e poiche le ampiezze del primo e del secondo membro devono essere uguali, si perviene allarelazione
A5
(k ! m#2)2 + (2#2 =5
m2#4 + (2#2
che porge l’ampiezza richiesta
A := A(#) =
Lm2#4 + (2#2
(m#2 ! k)2 + (2#2, (514.5)
sempre definita per via del segno positivo del denominatore.
(c) Risonanza del sistemaIl sistema e in condizioni di risonanza quando la pulsazione forzante # determina la massimaampiezza di oscillazione per il moto di regime. Indicata con #R tale pulsazione di risonanza(sempreche definita), dovra quindi aversi:
A(#R) = max0>0
A(#) .
La continuita e il carattere crescente della funzione quadratica x * x2 permettono di rifor-mulare la condizione nel modo equivalente, piu semplice,
A(#R)2 = max0>0
A(#)2
che richiede il calcolo di
max0>0
A(#)2 = max0>0
m2#4 + (2#2
(m#2 ! k)2 + (2#2.
Per brevita, conviene porre #2 = z e considerare la funzione ausiliaria
F(z) =m2z2 + (2z
(mz ! k)2 + (2z, z > 0 , (514.6)
che soddisfa le condizioni ai limiti
limz$0+
F(z) = 0 limz$+%
F(z) = 1
ed e derivabile su tutto l’intervallo dei reali positivi, con derivata
F"(z) = m2k2$!2m
kz2 + 2z +
(2
m2
% 1[(mz ! k)2 + (2z]2
, z > 0 .
Stefano Siboni 2720

Universita degli studi di Trento Esercizi di Meccanica razionale
Il segno di F"(z) coincide con quello del trinomio entro parentesi
!2m
kz2 + 2z +
(2
m2
il cui grafico e quello di una parabola con la concavita rivolta verso il basso e munita di dueintersezioni con l’asse delle z, una positiva e l’altra negativa:
z± =!2;
"4 +
8(2
mk
!4m
k
=k
2m
+1 ±
"1 +
2(2
mk
,,
in modo che F"(z) > 0 % z " (0, z+) e F"(z) < 0 % z > z+. Ne deriva che la funzione F(z)e strettamente crescente in (0, z+) e decrescente in (z+,+)): z+ costituisce un massimoassoluto di F(z) e fornisce il valore della pulsazione di risonanza:
#R =$
z+ =
Lk
2m
+1 ±
"1 +
2(2
mk
,.
La figura seguente mostra il tipico andamento dell’ampiezza del moto di regime quale fun-zione della pulsazione #:
Si osservi che per ( 6 0 la pulsazione di risonanza risulta prossima alla pulsazione normaledell’oscillatore armonico semplice di massa m e costante elastica k:
#R 65
k/m .
Stefano Siboni 2721

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 515. Piccole oscillazioni di un sistema non pesanteNel piano Oxy di una terna cartesiana ortogonale destra Oxyz, due aste CA e DB, di ugualimassa m e lunghezza L, sono vincolate a ruotare attorno ai rispettivi punti fissi C(!2L, 0) eD(2L, 0). Una molla ideale di costante elastica k e tesa fra gli estremi A e B. Peso e attritisono trascurabili.
Si usino gli angoli (!,2) " R2 in figura come parametri lagrangiani per determinare delsistema:
(a) le configurazioni di equilibrio;(b) le proprieta di stabilita degli equilibri;(c) l’equazione delle piccole oscillazioni attorno all’unico equilibrio stabile;(d) le pulsazioni normali delle piccole oscillazioni di cui al punto (c);(e) i modi normali delle piccole oscillazioni discusse in (c).
Soluzione(a) Configurazioni di equilibrioL’unica sollecitazione attiva sul sistema e quella elastica fra i punti A e B, che ha naturaposizionale conservativa. Per calcolarne il potenziale occorre determinare il vettore posizionedell’estremo A della prima asta
A ! O = C !O + A ! C = !2L e1 + L cos ! e1 + L sin! e2 = L(cos ! ! 2)e1 + L sin ! e2
e l’analoga espressione per il vettore posizione dell’estremo B della seconda
B ! O = D ! O + B ! D = 2L e1 ! L cos 2 e1 + L sin2 e2 = L(2 ! cos 2)e1 + L sin 2 e2 .
Da queste relazioni segue il vettore distanza
B ! A = L(4 ! cos 2 ! cos !)e1 + L(sin 2 ! sin!)e2
con modulo quadrato
|B ! A|2 = L2(4 ! cos 2 ! cos !)2 + L2(sin 2 ! sin !)2 =
= L2(18 ! 8 cos 2 ! 8 cos ! + 2 cos 2 cos ! ! 2 sin 2 sin !) ,
Stefano Siboni 2722

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui il potenziale del sistema diventa
U = Uel = !k
2|B ! A|2 = !kL2
27!8 cos 2 ! 8 cos ! + 2 cos(2 + !)
8+ costante =
= kL274 cos 2 + 4 cos !! cos(2 + !)
8+ costante .
Gli equilibri del sistema sono i punti critici del potenziale e si identificano percio con tuttee sole le soluzioni del sistema di equazioni trigonometriche
')
*kL2
7!4 sin! + sin(2 + !)
8= 0
kL27!4 sin2 + sin(2 + !)
8= 0
che debitamente semplificato si riscrive nella forma equivalente')
*sin(2 + !) = 4 sin !
sin(2 + !) = 4 sin 2 .(515.1)
Sottraendo membro a membro le due equazioni si ottiene
0 = 4(sin 2 ! sin!)
e quindisin2 = sin ! .
Questa relazione ammette soluzioni della forma 2 = ! e 2 = " ! !.
(i) Per 2 = ! la prima delle equazioni (515.1) diventa
sin 2! ! 4 sin ! = 0 1+ 2 sin ! cos ! ! 4 sin! = 0
e si esprime nella forma fattorizzata
2 sin ! (cos ! ! 2) = 0
dalla quale si deducono le soluzioni
! = 0 , ! = "
che corrispondono agli equilibri
(!,2) = (0, 0) , (!,2) = (",") .
(ii) Se 2 = " ! ! risulta invece
sin " = 4 sin ! 1+ 0 = 4 sin !
Stefano Siboni 2723

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui sin ! = 0 e ! = 0,". Si hanno cosı gli ulteriori equilibri
(!,2) = (0,") , (!,2) = (", 0) .
(b) Stabilita degli equilibriVista la natura posizionale conservativa del sistema, la stabilita degli equilibri puo essereanalizzata facendo uso dei teoremi di Lagrange-Dirichlet e di inversione parziale. Dallederivate parziali prime del potenziale
.U
.!(!,2) = kL2
7!4 sin! + sin(2 + !)
8
.U
.2(!,2) = kL2
7!4 sin2 + sin(2 + !)
8
e immediato ricavare le derivate seconde
.2U
.!2(!,2) = kL2
7!4 cos ! + cos(2 + !)
8
.2U
.!.2(!,2) =
.2U
.2.!(!,2) = kL2 cos(2 + !)
.2U
.22(!,2) = kL2
7!4 cos 2 + cos(2 + !)
8
che conducono alla matrice hessiana
HU (!,2) = kL2
F!4 cos ! + cos(2 + !) cos(2 + !)
cos(2 + !) !4 cos 2 + cos(2 + !)
G.
La matrice va calcolata in ciascuna configurazione di equilibrio del sistema.
Configurazione (!,2) = (0, 0)In questo caso la matrice hessiana del potenziale si riduce a
HU (0, 0) = kL2
+!3 11 !3
,
e presenta determinante positivo e traccia negativa. La matrice e quindi definita negativa ecaratterizza l’equilibrio come massimo relativo proprio del potenziale, la cui stabilita vieneassicurata dal teorema di Lagrange-Dirichlet.
Configurazione (!,2) = (0,")La matrice hessiana del potenziale in questa configurazione assume la forma
HU (0,") = kL2
+!5 !1!1 3
,
Stefano Siboni 2724

Universita degli studi di Trento Esercizi di Meccanica razionale
ed e indefinita a causa del segno negativo del suo determinante. Gli autovalori risultano unopositivo e uno negativo. L’instabilita dell’equilibrio segue dal teorema di inversione parzialedi Lagrange-Dirichlet.
Configurazione (!,2) = (", 0)Nella fattispecie si ha la matrice
HU (", 0) = kL2
+3 !1!1 !5
,
anch’essa indefinita per via del suo determinante negativo. L’equilibrio e ancora instabileper l’inversione parziale di Lagrange-Dirichlet.
Configurazione (!,2) = (",")Per questa configurazione la matrice hessiana del potenziale e definita positiva
HU (",") = kL2
+5 11 5
,
in quanto determinante e traccia sono entrambi positivi. Ne deriva che l’equilibrio deveconsiderarsi instabile per il teorema di inversione parziale di Lagrange-Dirichlet.
(c) Equazione delle piccole oscillazioni attorno all’equilibrio stabilePer studiare le piccole oscillazioni attorno all’equilibrio stabile (!,2) = (0, 0) e necessariodeterminare preliminarmente l’energia cinetica del sistema, che risulta dalla somma di uncontributo relativo all’asta CA e di uno associato all’asta DB. Per il primo si ha
TCA =12· mL2
3|! e3|2 =
12
mL2
3!2
mentre per il secondo risulta
TDB =12· mL2
3|! 2 e3|2 =
12
mL2
322
in modo che l’energia cinetica del sistema assume la forma
T = TCA + TDB =12
$mL2
3!2 +
mL2
322%
, =12(! 2)mL2
+1/3 00 1/3
,+!2
,,
essendoA(!,2) = mL2
+1/3 00 1/3
,
la matrice di rappresentazione dell’energia cinetica stessa. L’equazione delle piccole oscil-lazioni vale allora
A(0, 0)+
3!32
,! HU (0, 0)
+3!32
,= 0
Stefano Siboni 2725

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
mL2
+1/3 00 1/3
,+3!32
,! kL2
+!3 11 !3
,+3!32
,= 0
e quindi '(()
((*
mL2
33! + kL2(33! ! 32) = 0
mL2
332 + kL2(!3! + 332) = 0 .
(d) Pulsazioni normali delle piccole oscillazioniLe pulsazioni normali delle piccole oscillazioni sono determinate dall’equazione caratteristica
det7#2A(0, 0) + HU (0, 0)
8= 0
che sostituendo le espressioni esplicite delle matrici A(0, 0) e HU (0, 0) assume la forma
det
/
01
mL2
3#2 ! 3kL2 kL2
kL2 mL2
3#2 ! 3kL2
2
34 = 0
vale a dire
det
/
01
m#2
3k! 3 1
1m#2
3k! 3
2
34 = 0 .
Posto per brevita , = m#2/3k, l’equazione caratteristica diventa allora
(, ! 3)2 ! 1 = 0 1+ (, ! 3 ! 1)(, ! 3 + 1) = 0
ed ammette le radici,1 = 2 ,2 = 4
alle quali corrispondono le pulsazioni normali
#1 ="
3k
m,1 =
$6"
k
m#2 =
"3k
m,2 =
$12"
k
m.
(e) Modi normali delle piccole oscillazioniI modi normali sono caratterizzati, oltre che dalle relative pulsazioni, dagli appropriati vettoridelle ampiezze. Questi sono le soluzioni non banali del problema agli autovalori generalizzato
7#2
i A(0, 0) + HU (0, 0)8+ ai
bi
,= 0 , (ai, bi) " R2 \ {(0, 0)} ,
Stefano Siboni 2726

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia/
01
mL2
3#2
i ! 3kL2 kL2
kL2 mL2
3#2
i ! 3kL2
2
34
/
1ai
bi
2
4 = 0 , (ai, bi) " R2 \ {(0, 0)} ,
ed infine/
01
m#2i
3k! 3 1
1m#2
i
3k! 3
2
34
/
1ai
bi
2
4 = 0 , (ai, bi) " R2 \ {(0, 0)} , (515.2)
per i = 1 (modo basso) e i = 2 (modo alto).
Modo basso — #1 =5
6k/m
Per #1 =5
6k/m il problema (515.2) e ricondotto al seguente
+!1 11 !1
,+a1
b1
,= 0 , (a1, b1) " R2 \ {(0, 0)} ,
che corrisponde al sistema lineare omogeneo
D!a1 + b1 = 0a1 ! b1 = 0
e fornisce la soluzione generale b1 = a1, % a1 " R \ {0}. Ne viene l’espressione generale delmodo normale +
3!32
,= a1
+11
,cos
$"6k
mt + /1
%% t " R ,
caratterizzato dal fatto che le due variabili angolari oscillano con eguale ampiezza e perfet-tamente in fase attorno ai rispettivi valori di equilibrio — a1 > 0 e l’ampiezza e /1 la fase.La figura seguente mostra le peculiarita del modo normale:
Stefano Siboni 2727

Universita degli studi di Trento Esercizi di Meccanica razionale
Modo alto — #2 =5
12k/mIn questo caso l’equazione per il vettore delle ampiezze si riduce a
+1 11 1
,+a2
b2
,= 0 , (a2, b2) " R2 \ {(0, 0)} ,
che porge il sistema lineare omogeneoD
a2 + b2 = 0a2 + b2 = 0
e la relativa soluzione generale b2 = !a2, % a2 " R \ {0}. Si perviene cosı all’espressione delmodo normale: +
3!32
,= a2
+1!1
,cos
$"12k
mt + /2
%% t " R ,
dove a2 > 0 e /2 sono costanti reali arbitrarie. Nel modo normale alto i due parametrilagrangiani oscillano con la stessa ampiezza ma in opposizione di fase, come illustrato infigura:
Esercizio 516. Oscillatore armonico smorzatoUn punto materiale P di massa m = 4 e vincolato a scorrere senza attrito lungo l’asse Oy diuna terna inerziale. Una molla di costante elastica k = 17 congiunge l’origine O con il puntoP , che e peraltro soggetto ad una forza di resistenza viscosa con costante di frizione ( = 4.Determinare l’equazione del moto del sistema e la sua soluzione generale, specificando lanatura dei moti.
SoluzioneSi tratta di un oscillatore armonico smorzato unidimensionale, la cui equazione del motoassume la forma lineare omogenea a coe!cienti costanti
4y + 4y + 17y = 0 .
La soluzione generale si determina calcolando le radici dell’equazione caratteristica
4,2 + 4, + 17 = 0
Stefano Siboni 2728

Universita degli studi di Trento Esercizi di Meccanica razionale
che risultano complesse coniugate
,1, ,2 =!4±
$16 ! 4 · 4 · 172 · 4 =
!4 ± 16 i
8= !1
2± 2 i .
Si ha pertanto la soluzione
y(t) = e!12 t[c1 cos(2t) + c2 sin(2t)] % t " R
che dipende dalle costanti arbitrarie c1, c2 " R e descrive un moto oscillatorio smorzato delsistema.
Esercizio 517. Asse centraleDeterminare l’equazione dell’asse centrale del sistema composto dai vettori *F1 = 2e1!5e2 +e3, applicato nel punto A1(0,!1, 2), e *F2 = !e1+3e2!2e3, applicato nel punto A2(1,!2, 0).
SoluzioneL’asse centrale e ben definito, trattandosi di sistema di vettori applicati con risultante nonnullo
*R = *F1 + *F2 = e1 ! 2 e2 ! e3 .
Il momento risultante del sistema rispetto all’origine vale
*MO = (A1 ! O) # *F1 + (A2 ! O) # *F2 =
!!!!!!
e1 e2 e3
0 !1 22 !5 1
!!!!!!+
!!!!!!
e1 e2 e3
1 !2 0!1 3 !2
!!!!!!=
= 9 e1 + 4 e2 + 2 e3 + 4 e1 + 2 e2 + e3 = 13 e1 + 6 e2 + 3 e3
e porge l’ulteriore espressione
*R # *MO =
!!!!!!
e1 e2 e3
1 !2 !113 6 3
!!!!!!= !16 e2 + 32 e3 .
I punti P dell’asse centrale a sono individuati dalla relazione vettoriale
P ! O =*R # *MO
|*R|2+ ' *R =
!16 e2 + 32 e3
6+ '(e1 ! 2 e2 ! e3) =
= !83
e2 +163
e3 + '(e1 ! 2 e2 ! e3) %' " R
che equivale all’equazione parametrica'((((()
(((((*
x = '
y = !83! 2'
z =163
! '
%' " R .
Stefano Siboni 2729

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 518. Massa e baricentro di un sistema materialeSi consideri il sistema illustrato in figura,
composto da una lamina quadrata ABCD di lato L e da un’asta rettilinea OP , di ugualelunghezza. La densita lineare dell’asta si scrive
,(z) = ! µ
L2z % z " [!L, 0] ,
mentre quella della lamina vale
&(y, z) =µ
L5z2(L ! y) % (y, z) " [!L/2, L/2]- [0, L] ,
essendo µ una costante positiva avente le dimensioni di una massa. Determinare:
(a) la massa del sistema;(b) la posizione del baricentro del sistema rispetto alla terna Oxyz.
Soluzione(a) Massa del sistemaL’integrale della densita lineare , fornisce la massa dell’asta OP
mOP
=06
!L
$! µ
L2z%
dz = ! µ
L2
-z2
2
.0
!L
= ! µ
L2
$!L2
2
%=
µ
2.
Per la lamina quadrata ABCD si ha, in modo analogo,
mABCD
=
L/26
!L/2
dy
L6
0
dzµ
L5z2(L ! y) =
µ
L5
L/26
!L/2
(L ! y)dy
L6
0
z2dz =
=µ
L5
-! (L ! y)2
2
.L/2
!L/2
-z3
3
.L
0
=µ
L5
12
$!L2
4+
94L2% L3
3=
µ
6L22L2 =
µ
3
Stefano Siboni 2730

Universita degli studi di Trento Esercizi di Meccanica razionale
sicche la massa del sistema risulta
m = mOP
+ mABCD
=µ
2+
µ
3=
56µ .
(b) Baricentro del sistemaData l’evidente simmetria, la sola coordinata non nulla del baricentro G
OPdell’asta OP e
la quota
zOP
=1
mOP
06
!L
z$! µ
L2z%
dz =2µ
$! µ
L2
%-z3
3
.0
!L
= ! 23L2
L3 = !23L
e di conseguenza
GOP
! O = !23L e3 .
Quanto alla lamina quadrata, l’esistenza del piano di simmetria Oyz consente di scrivere ilvettore posizione del baricentro come
GABCD
!O = yABCD
e2 + zABCD
e3 ,
dove l’ordinata vale
yABCD
=1
mABCD
L/26
!L/2
dy
L6
0
dz yµ
L5z2(L ! y) =
3µ
µ
L5
L/26
!L/2
y(L ! y)dy
L6
0
z2dz =
=3L5
-L
y2
2! y3
3
.L/2
!L/2
-z3
3
.L
0
=3L5
13
$!L3
8! L3
8
%L3
3= ! 1
12L
mentre la quota risulta
zABCD
=1
mABCD
L/26
!L/2
dy
L6
0
dz zµ
L5z2(L ! y) =
3µ
µ
L5
L/26
!L/2
(L ! y)dy
L6
0
z3dz =
=3L5
-Ly ! y2
2
.L/2
!L/2
L4
4=
34L
L2 =34L .
In definitivaG
ABCD! O = ! 1
12L e2 +
34L e3 .
Dal teorema distributivo si deduce poi in vettore posizione del baricentro
G ! O =m
OP(G
OP!O) + m
ABCD(G
ABCD! O)
mOP
+ mABCD
=
=65µ
-µ
2
$!2
3L e3
%+
µ
3
$! 1
12L e2 +
34L e3
%.=
65
$!1
3e3 !
136
e2 +14
e3
%L =
=65
$! 1
36e2 !
112
e3
%= ! 1
30e2 !
110
e3 .
Stefano Siboni 2731
Top Related