




γλώσσες
Σελίδες
Νομικός

Stability and Frequency Compensation
Chapter 10
General Consideration
Unstable if
Alternatively,
(to add in phase)(to grow in magnitude)
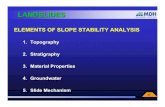
Body Plots
(GX,Gain cross over frequency)
(PX, phase crossoverpoint)
Worst Case Scenario (=1)
( increases)Assumptions:1. does not depend on frequency.2. 1The magnitude plots are shifted down. The system becomesmore stable as is reduced.H() with =1 represents the worst case stability. H () is often used to analyze stability.
increases
Review Slides
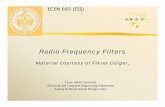
Laplace Transform/Fourier Transform for RC LPF
p=1/(RC)(Fourier Transform)(Laplace Transform)
-p
Location of the pole in the left complexplaneComplex s plane
Rules of thumb: (applicable to a pole)Magnitude:20 dB drop after the cut-off frequency
3dB drop at the cut-off frequency
Phase:-45 deg at the cut-off frequency. Phase is more significantly affected by the pole than magnitude.
0 degree at one decade prior to the cut-frequency
90 degrees one decade after the cut-off frequency
Laplace Transform/Fourier Transform for RC HPF
p=1/(RC)Zero at DC.(Fourier Transform)(Laplace Transform)
-p
Location of the pole in the left complexplaneComplex s plane
Zero at the origin.Thus phase(f=0)=90 degrees.The high pass filter has a cut-off frequency of 100.
Time-Domain Response of a System Versus Position of Poles
(unstable)(constant magnitudeOscillation)(exponential decay)The location of the poles of a closedLoop system is shown.
One-Pole System
(one-pole feedforward amplifier)
Ione pole system isUnconditionally Stable.
Root Locus Plot for a One Pole System
As the loop gain increase (e.g. ), the pole moves away from the origin.
Two-Pole System
The system is stable since theloop gain is less than 1 at a frequencyFor which the angle(H())=-180.
When is reduced,the system becomesmore stable.
Assumption: does not dependon frequency.
Root Locus Plot for a Two-Pole System (1)
Root Locus Plot for a Two-Pole System (2)
Three-Pole System
Relative Location of GX and PX
Case 1:
Top Related