YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN …gunther/... · 2 YAROSLAV KURYLEV, MATTI LASSAS,...
40
arXiv:1405.3384v1 [math-ph] 14 May 2014 LINEARIZATION STABILITY RESULTS AND ACTIVE MEASUREMENTS FOR THE EINSTEIN-SCALAR FIELD EQUATIONS YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN Abstract: We consider linearization stability results for the cou- pled Einstein equations and the scalar field equations for the metric g and scalar fields φ =(φ ℓ ) L ℓ=1 on a 4-dimensional globally hyperbolic Lorentzian manifold (M,g ). More precisely, we study the Einstein equations coupled with the scalar field equations and study the sys- tem Ein(g )= T , T = T (g,φ)+ F 1 , and g φ ℓ − m 2 φ ℓ = F 2 , where the sources F =(F 1 , F 2 ) correspond to perturbations of the physi- cal fields which we control. The sources F need to be such that the fields (g,φ, F ) are solutions of this system and satisfy the conservation law div g (T )=0. If (g ε ,φ ε ) solves the above equations, the derivatives ˙ g = ∂ ε g ε | ε=0 , ˙ φ = φ ε | ε=0 , and f =(f 1 ,f 2 )= ∂ ε F ε | ε=0 solve the lin- earized Einstein equations and the linearized conservation law 1 2 g pk ∇ p f 1 kj + L ℓ=1 f 2 ℓ ∂ j φ ℓ =0,j =1, 2, 3, 4, where g = g ε | ε=0 and φ = φ ε | ε=0 . In this case we say that ( g, φ) and f have the linearization stability property. In linearization sta- bility one ask the converse: If ˙ g, ˙ φ, and f solve the linearized Einstein equations and the linearized conservation law, do there exist a family F ε =(F 1 ε , F 2 ε ) of sources and functions (g ε ,φ ε ) depending smoothly on ε ∈ [0,ε 0 ), ε 0 > 0, such that (g ε ,φ ε ) solves the Einstein-scalar field equations and the conservation law. Under the condition that the back- ground fields g and φ vary enough and L ≥ 5, we prove a microlocal version of this: When Y ⊂ M is a 2-dimensional space-like surface and (y,η) is an element of the conormal bundle N ∗ Y of Y , one can find a linearized source f that is a conormal distibution with respect to the surface Y with a prescribed principal symbol at (y,η) such that ( g, φ) and f have the linearization stability property. This result is proven by constructing a model with adaptive source functions. In this model the source term F 1 corresponds to e.g. fluid fields consisting of par- ticles which 4-velocity vectors are controlled and F 2 contains a term corresponding to a secondary source function that adapts the changes of g,φ, and F 1 so that the physical conservation law is satisfied. The obtained results can be applied to show that one can send gravitational Date : May 14, 2014. 1
Transcript of YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN …gunther/... · 2 YAROSLAV KURYLEV, MATTI LASSAS,...

arX
iv:1
405.
3384
v1 [
mat
h-ph
] 1
4 M
ay 2
014
LINEARIZATION STABILITY RESULTS AND ACTIVEMEASUREMENTS FOR THE EINSTEIN-SCALAR
FIELD EQUATIONS
YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
Abstract: We consider linearization stability results for the cou-pled Einstein equations and the scalar field equations for the metric gand scalar fields φ = (φℓ)Lℓ=1 on a 4-dimensional globally hyperbolicLorentzian manifold (M, g). More precisely, we study the Einsteinequations coupled with the scalar field equations and study the sys-tem Ein(g) = T , T = T (g, φ) + F1, and �gφ
ℓ − m2φℓ = F2, wherethe sources F = (F1,F2) correspond to perturbations of the physi-cal fields which we control. The sources F need to be such that thefields (g, φ,F) are solutions of this system and satisfy the conservationlaw divg(T ) = 0. If (gε, φε) solves the above equations, the derivatives
g = ∂εgε|ε=0, φ = φε|ε=0, and f = (f 1, f 2) = ∂εFε|ε=0 solve the lin-earized Einstein equations and the linearized conservation law
1
2gpk∇pf
1kj +
L∑
ℓ=1
f 2ℓ ∂jφℓ = 0, j = 1, 2, 3, 4,
where g = gε|ε=0 and φ = φε|ε=0. In this case we say that (g, φ)and f have the linearization stability property. In linearization sta-bility one ask the converse: If g, φ, and f solve the linearized Einsteinequations and the linearized conservation law, do there exist a familyFε = (F1
ε ,F2ε ) of sources and functions (gε, φε) depending smoothly on
ε ∈ [0, ε0), ε0 > 0, such that (gε, φε) solves the Einstein-scalar fieldequations and the conservation law. Under the condition that the back-
ground fields g and φ vary enough and L ≥ 5, we prove a microlocalversion of this: When Y ⊂M is a 2-dimensional space-like surface and(y, η) is an element of the conormal bundle N∗Y of Y , one can finda linearized source f that is a conormal distibution with respect to the
surface Y with a prescribed principal symbol at (y, η) such that (g, φ)and f have the linearization stability property. This result is provenby constructing a model with adaptive source functions. In this modelthe source term F1 corresponds to e.g. fluid fields consisting of par-ticles which 4-velocity vectors are controlled and F2 contains a termcorresponding to a secondary source function that adapts the changesof g, φ, and F1 so that the physical conservation law is satisfied. Theobtained results can be applied to show that one can send gravitational
Date: May 14, 2014.1

2 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
waves that propagates along the geodesic determined by (y, η) and thepolarization of this wave can be controlled.AMS classification:83C05, 35J25, 53C50
Contents
1. Introduction and main results 21.1. Formulation of the linearization stability problem 52. Basic properties of the Einstein equations 92.1. Reduced Einstein equation and wave map 92.2. Linearization of Einstein equation and conservation law 133. Analysis for the Einstein-scalar field equations 153.1. Linearized conservation law and harmonicity conditions 164. A model with adaptive source function 204.1. Initial value problem with adaptive source functions 205. Proof of the microlocal linearization stabililty 266. Application: Gravitational wave packets 31Appendix: Motivation of adaptive source functions using
Lagrangian formulation 33References 36
Keywords: Inverse problems, Lorentzian manifolds, Einstein equa-tions, scalar fields, non-linear hyperbolic equations.
1. Introduction and main results
We consider the linearization stability result that is essential for theinverse problems for the non-linear Einstein equations coupled withmatter field equations. In this paper, we consider for the matter fieldsthe simplest possible model, the scalar field equations and study theperturbations of a globally hyperbolic Lorentzian manifold (M, g) ofdimension (1 + 3), where the metric signature of g is (−,+,+,+).
Our problem is related to the following inverse problem: Can anobserver in a space-time determine the structure of the surroundingspace-time by doing measurements near its world line. To study this,we need to produce a large number of measurements, or equivalently,a large number of sources.

LINEARIZATION STABILITY RESULTS 3
Ug I+(p−)
µz,η
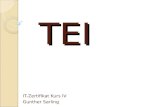
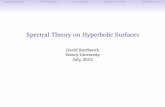
FIGURE 1. This is a schematic figure in R1+1. The black vertical
line is the freely falling observer µ([−1, 1]). The rounded black squareis π(Uz0,η0) that is is a neighborhood of z0, and the red curve passingthrough z ∈ π(Uz0,η0) is the time-like geodesic µz,η([−1, 1]). The bound-ary of the domain Ug where we observe waves is shown on blue. Theblack future cone is the set I+g (p
−).
1.0.1. Notations. Let (M, g) be a C∞-smooth (1+3)-dimensional time-orientable Lorentzian manifold. For x, y ∈ M we say that x is in thechronological past of y and denote x ≪ y if x 6= y and there is atime-like path from x to y. If x 6= y and there is a causal path fromx to y, we say that x is in the causal past of y and denote x < y. Ifx < y or x = y we denote x ≤ y. The chronological future I+(p) ofp ∈ M consist of all points x ∈ M such that p ≪ x, and the causalfuture J+(p) of p consist of all points x ∈ M such that p ≤ x. Onedefines similarly the chronological past I−(p) of p and the causal pastJ−(p) of p. For a set A we denote J±(A) = ∪p∈AJ
±(p). We also denoteJ(p, q) := J+(p) ∩ J−(q) and I(p, q) := I+(p) ∩ I−(q). If we need toemphasize the metric g which is used to define the causality, we denoteJ±(p) by J±
g (p) etc.Let γx,ξ(t) = γgx,ξ(t) = expx(tξ) denote a geodesics in (M, g). The
projection from the tangent bundle TM to the base point of a vector isdenoted by π : TM → M . Let LxM denote the light-like directions ofTxM , and L+
xM and L−xM denote the future and past pointing light-
like vectors, respectively. We also denote +g (x) = expx(L
+xM)∪{x} the
union of the image of the future light-cone in the exponential map of(M, g) and the point x.
By [10], an open time-orientable Lorenzian manifold (M, g) is glob-ally hyperbolic if and only if there are no closed causal paths in M andfor all q−, q+ ∈M such that q− < q+ the set J(q−, q+) ⊂ M is compact.We assume throughout the paper that (M, g) is globally hyperbolic.
When g is a Lorentzian metric, having eigenvalues λj(x) and eigen-vectors vj(x) in some local coordinates, we will use also the corre-sponding Riemannian metric, denoted g+ which has the eigenvalues

4 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
|λj(x)| and the eigenvectors vj(x) in the same local coordinates. LetBg+(x, r) = {y ∈ M ; dg+(x, y) < r}. Finally, when X is a set, letP (X) = 2X = {Z; Z ⊂ X} denote the power set of X.
1.0.2. Perturbations of a global hyperbolic metric. Let (M, g) be a C∞-smooth globally hyperbolic Lorentzian manifold. We will call g thebackground metric on M and consider its small perturbations. ALorentzian metric g1 dominates the metric g2, if all vectors ξ that arelight-like or time-like with respect to the metric g2 are time-like withrespect to the metric g1, and in this case we denote g2 < g1. As (M, g)is globally hyperbolic, it follows from [34] that there is a Lorentzianmetric g such that (M, g) is globally hyperbolic and g < g. One canassume that the metric g is smooth. We use the positive definite Rie-mannian metric g+ to define norms in the spaces Ck
b (M) of functionswith bounded k derivatives and the Sobolev spaces Hs(M).
By [11], the globally hyperbolic manifold (M, g) has an isometry Φ
to the smooth product manifold (R×N, h), where N is a 3-dimensional
manifold and the metric h can be written as h = −β(t, y)dt2 + κ(t, y)where β : R × N → (0,∞) is a smooth function and κ(t, · ) is a Rie-mannian metric on N depending smoothly on t ∈ R, and the subman-ifolds {t′} × N are C∞-smooth Cauchy surfaces for all t′ ∈ R. Wedefine the smooth time function t : M → R by setting t(x) = t ifΦ(x) ∈ {t} × N . Let us next identify these isometric manifolds, thatis, we denote M = R×N .
For t ∈ R, let M(t) = (−∞, t)×N and, for a fixed t0 > 0 and t1 > t0,let Mj =M(tj), j = 1, 2. Let r0 > 0 be sufficiently small and V(r0) bethe set of metrics g on M1 = (−∞, t1)×N , which C8
b (M1)-distance tog is less that r0 and coincide with g in M(0) = (−∞, 0)×N .
1.0.3. Observation domain U . For g ∈ V(r0), let µg : [−1, 1] → M1 bea freely falling observer, that is, a time-like geodesic on (M, g). Let−1 < s−2 < s−1 < 1 be such that p− = µg(s−1) ∈ {0} ×N . Below, wedenote s− = s−1 and µ = µg.
When z0 = µ(s−2) ∈ M(0) and η0 = ∂sµ(s−2), let Uz0,η0(h) be theopen h-neighborhood of (z0, η0) in the Sasaki metric of (TM, g+). We
use below a small parameter h > 0. For (z, η) ∈ Uz0,η0(2h) we defineon (M, g) a freely falling observer µg,z,η : [−1, 1] → M , such that
µg,z,η(s−2) = z, and ∂sµg,z,η(s−2) = η. We assume that h is so small
that π(Uz0,η0(2h)) ⊂M(0) and for all g ∈ V(r0) and (z, η) ∈ Uz0,η0(2h)the geodesic µg,z,η([−1, 1]) ⊂ M is well defined and time-like. We
denote, see Fig. 1, Uz0,η0 = Uz0,η0(h) and
Ug=⋃
(z,η)∈Uz0,η0
µg,z,η([−1, 1]), U+g = Ug ∩ I
+(µg,z,η(s+)),(1)
and we also denote U = Ug and U+ = U+g .

LINEARIZATION STABILITY RESULTS 5
1.1. Formulation of the linearization stability problem.
1.1.1. Einstein equations. Below, we use the Einstein summation con-vention. The roman indexes i, j, k etc. run usually over the values0, 1, 2, 3 as the greek letters are reserved for other indexes in the sums.The Einstein tensor of a Lorentzian metric g = gjk(x) is
Einjk(g) = Ricjk(g)−1
2(gpq Ricpq(g))gjk.
Here, Ricpq(g) is the Ricci curvature of the metric g. We define thedivergence of a 2-covariant tensor Tjk to be (divgT )k = ∇n(g
njTjk).Let us consider the Einstein equations in presence of matter,
Einjk(g) = Tjk,(2)
divgT = 0,(3)
for a Lorentzian metric g and a stress-energy tensor T related to thedistribution of mass and energy. We recall that by Bianchi’s identitydivg(Ein(g)) = 0 and thus the equation (3), called the conservation lawfor the stress-energy tensor, follows automatically from (2).
1.1.2. Reduced Einstein tensor. Let m ≥ 5, t1 > t0 > 0 and g′ ∈ V(r0)be a Cm-smooth metric that satisfy the Einstein equations Ein(g′) = T ′
on M(t1). When r0 above is small enough, there is a diffeomorphismf :M(t1) → f(M(t1)) ⊂M that is a (g′, g)-wave map f : (M(t1), g
′) →(M, g) and satisfies M(t0) ⊂ f(M(t1)). Here, f : (M(t1), g
′) → (M, g)is a wave map, see [12, Sec. VI.7.2 and App. III, Thm. 4.2], if
�g′,gf = 0 in M(t1),(4)
f = Id, in (−∞, 0)×N,(5)
where �g′,gf = g′ · ∇2f is the wave map operator, and ∇ is the co-variant derivative for the maps (M1, g
′) → (M, g), see [12, formula(VI.7.32)]. The existence and the properties of the map f is dis-cussed below in Subsection 2.1.3. The wave map has the propertythat Ein(f∗g
′) = Eing(f∗g′), where Eing(g) is the g-reduced Einstein
tensor,
(Eingg)pq = −1
2gjk∇j∇kgpq +
1
4(gnmgjk∇j∇kgnm)gpq + Ppq(g, ∇g),
where ∇j is the covariant differentation with respect to the metric g and
Ppq is a polynomial function of gnm, gnm, and ∇jgnm with coefficientsdepending on the metric gnm and its derivatives. Considering the wavemap f as a transformation of coordinates, we see that g = f∗g
′ andT = f∗T
′ satisfy the g-reduced Einstein equation
Eing(g) = T on M(t0).(6)

6 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
In the literature, the above is often stated by saying that the reducedEinstein equations (6) is the Einstein equations written with the wave-gauge corresponding to the metric g. The equation (6) is a quasi-linearhyperbolic system of equations for gjk. We emphasize that a solution ofthe reduced Einstein equations can be a solution of the original Einsteinequations only if the stress energy tensor satisfies the conservation law∇g
jTjk = 0. It is usual also to assume that the energy density is
non-negative. For instance, the weak energy condition requires thatTjkX
jXk ≥ 0 for all time-like vectors X. Next, we couple the Einsteinequations with matter fields and formulate an initial value problem forthe g-reduced Einstein equations with abstract sources.
1.1.3. The direct problem. We consider the coupled system of the Ein-stein equation and L scalar field equations with some sources F1 andF2. In these equations we use the wave gauge, that is, the equationsare written for the metric tensor and the scalar fied that are pushedforward with the wave map so that the Einstein tensor of g is equal tothe reduced Einstein tensor Eing(g).
Let g and φ = (φℓ)Lℓ=1 be C∞-background fields on M . Consider
Eing(g) = T, Tjk = Tjk(g, φ) + F1jk, in M0,(7)
Tjk(g, φ) =
L∑
ℓ=1
(∂jφℓ ∂kφℓ −1
2gjkg
pq∂pφℓ ∂qφℓ − V (φℓ)gjk),
�gφℓ − V ′(φℓ) = F2ℓ , ℓ = 1, 2, 3, . . . , L,
g = g and φℓ = φℓ in (−∞, 0)×N
where F1 and F2 are supported in U+g ∩J+
g (p−), V (s) = 1
2m2s2. Above,
�gφ = (−det(g))−1
2∂p((−det(g))1
2 gpq∂qφ). We assume that the back-
ground fields g and φ satisfy the equations (7) with F1 = 0 and F2 = 0.Note that above J+
g (p−) ∩M0 ⊂ J+
g (p−) when g ∈ V(r0).
To obtain a physically meaningful model, we need to assume thatthe physical conservation law in relativity,
∇p(gpkTkj) = 0, for j = 1, 2, 3, 4, where Tkj = Tkj(g, φ) + F1
kj(8)
is satisfied. Here ∇ = ∇g is the connection corresponding to g. InSubsection 2.1.4 we show that for the solution (g, φ) of the system (7)and the conservation law (8) the reduced Einstein tensor Eing(g) willthen be equal to the Einstein tensor Ein(g) .
We mainly need local existence results1 for the system (7). Theglobal existence problem for the related systems has recently attractedmuch interest in the mathematical community and many importantresults been obtained, see e.g. [18, 22, 63, 65, 69, 70].
1In this paper we do not use optimal smoothness for the solutions in classical Ck
spaces or Sobolev space W k,p but just suitable smoothness for which the non-linearwave equations can be easily analyzed using L2-based Sobolev spaces.

LINEARIZATION STABILITY RESULTS 7
We encounter above the difficulty that the source F = (F1,F2) in(7) has to satisfy the condition (8) that depends on the solution g of(7). This makes the formulation of active measurements in relativ-ity difficult. Later, we consider a model where the source term F1
corresponds to e.g. fluid fields consisting of particles whose4-velocityvectors are controlled and F2 contains a term corresponding to a sec-ondary source function that adapts the changes of g, φ, and F1 so thatthe physical conservation law is satisfied.
1.1.4. Linearized equations. We need also to consider the linearizedversion of the equations (7) that have the form (in local coordinates)
�g gjk + Ajk(g, φ, ∂g, ∂φ) = f 1, in M0,(9)
�gφℓ +Bℓ(g, φ, ∂g, ∂φ) = f 2, ℓ = 1, 2, 3, . . . , L,
where Ajk and Bℓ are first order linear differential operators whose
coefficients depend on g and φ. For more explicit formulation, seeSubsection 2.2.1. When gε and φε are solutions of (7) with source Fε
depending smoothly on ε ∈ R such that (gε, φε,Fε)|ε=0 = (g, φ, 0), then
(g, φ, f) = (∂εgε, ∂εφε, ∂εFε)|ε=0 solve (9).Let us consider the concept of the linearization stability (LS) for the
source problems, cf. [33]:
Definition 1.1. Let s0 > 4 and consider a Cs0+4-smooth source f =(f 1, f 2) that is supported in Ug and satisfies the linearized conservationlaw
1
2gpk∇pf
1kj +
L∑
ℓ=1
f 2ℓ ∂jφℓ = 0, j = 1, 2, 3, 4.(10)
Let (g, φ) be the solution of the linearized Einstein equations (9) withsource f . We say that f has the LS-property in Cs0(M0) if there areε0 > 0 and a family Fε = (F1
ε ,F2ε ) of sources, supported in Ugε for all
ε ∈ [0, ε0), and functions (gε, φε) that depend smoothly on ε ∈ [0, ε0) inCs0(M0) such that
(gε, φε) solves the equations (7) and the conservation law (8),(11)
(gε, φε,Fε)|ε=0 = (g, φ, 0), and (g, φ, f) = (∂εgε, ∂εφε, ∂εFε)|ε=0.
In this case, we say that f = (f 1, f 2) has the LS-property with thefamily Fε, ε ∈ [0, ε0).
Note that above (10) is obtained by linearization of the conservationlaw (8).
Next, we consider sources that are conormal distributions. WhenY ⊂ Ug is a 2-dimensional space-like submanifold, consider local co-ordinates defined in V ⊂ M0 such that Y ∩ V ⊂ {x ∈ R
4; xjb1j =
0, xjb2j = 0}, where b1j , b2j ∈ R. Next we slightly abuse the notation
by identifying x ∈ V with its coordinates X(x) ∈ R4. We denote

8 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
f ∈ In(Y ), n ∈ R, if in the above local coordinates, f can be writtenas
f(x1, x2, x3, x4) = Re
∫
R2
ei(θ1b1m+θ2b2m)xm
σf (x, θ1, θ2) dθ1dθ2,(12)
where σf (x, θ) ∈ Sn0,1(V ;R
2), θ = (θ1, θ2) is a classical symbol. Afunction c(x, θ) that is n-positive homogeneous in θ, i.e., c(x, sθ) =snc(x, θ) for s > 0, is the principal symbol of f if there is φ ∈ C∞
0 (R2)being 1 near zero such that σf (x, θ) − (1 − φ(θ))c(x, θ) ∈ Sn1
0,1(V ;R2),n1 < n. When η = θ1b1 + θ2b2 ∈ N∗
xY , we say that c(x, η) = c(x, θ) isthe value of the principal symbol of f at (x, η) ∈ N∗Y .
We need a condition that we call microlocal linearization stability:
Definition of the µ-LS (Microlocal linearization stability) prop-erty: We say that the set U+
g , and (M, g) have the microlocal lineariza-tion stability property if the following holds:
Let Y ⊂ U+g be a 2-dimensional space-like submanifold, V ⊂ U+
g anopen local coordinate neighborhood of y ∈ Y with coordinates X : V →R
4, Xj(x) = xj such that X(Y ∩ V ) ⊂ {x ∈ R4; xjb1j = 0, xjb2j = 0}.
Let, in addition, (y, η) ∈ N∗Y be a light-like covector. W ⊂ N∗Y bea conic neighborhood of (y, η), (cjk)
4j,k=1 be a symmetric matrix that
satisfies
glk(y)ηlckj = 0, for all j = 1, 2, 3, 4,(13)
and (dℓ)Lℓ=1 ∈ R
L. Then there is n1 ∈ Z+ such that for any n ∈ Z−,n ≤ −n1 there are f 1
jk ∈ In(Y ), (j, k) ∈ {1, 2, 3, 4}2, and f 2ℓ ∈ In(Y ),
ℓ = 1, 2, . . . , L, supported in V with symbols that are in S−∞ outsidethe neighborhood W of (y, η), and whose principal symbols at (y, η) are
equal to f 1jk(y, η) = cjk and f 2
ℓ (y, η) = dℓ, respectively. Moreover, the
source f = (f 1, f 2) satisfies the linearized conservation law (10) andf has the LS property (11) in Cs1(M0), s1 ≥ 13, with a family Fε,ε ∈ [0, ε0) such that Fε are supported in V .
1.1.5. Main results. We consider the following condition that is validwhen the background fields vary sufficiently:
Condition A: Assume that at any x ∈ U g there is a permutationσ : {1, 2, . . . , L} → {1, 2, . . . , L}, denoted σx, such that the 5 × 5
matrix [Bσjk(φ(x),∇φ(x))]j,k≤5 is invertible, where
[Bσjk(φ(x),∇φ(x))]k,j≤5 =
[( ∂jφℓ(x))ℓ≤5, j≤4
(φℓ(x))ℓ≤5
].
Our main result is that when the Condition A is valid, also thecondition µ-LS is valid:

LINEARIZATION STABILITY RESULTS 9
Theorem 1.2. (Microlocal linearization stability) Let (M, g) be a smooth,globally hyperbolic Lorentzian manifold with a global time function t :M → R and M0 = t−1(−∞, t0). Moreover, let U+
g , Ug ⊂ M0 be the
sets of the form (1) and let (g, φ) satisfy the equation (7) with vanish-ing sources F1 = 0 and F2 = 0. Assume that Condition A is validin Ug. Then the set U+
g and (M, g) have the microlocal linearizationstability property.
2. Basic properties of the Einstein equations
2.1. Reduced Einstein equation and wave map. In this sectionwe review well known results for the Einstein equation and the wavemaps that we will need later.
2.1.1. Geometric considerations. Let us recall some definitions givenin the Introduction. Let (M, g) be a C∞-smooth globally hyperbolicLorentzian manifold and g be a C∞-smooth globally hyperbolic metricon M such that g < g. Let us start by explaining how one can con-struct a C∞-smooth metric g such that g < g and (M, g) is globallyhyperbolic: Let v(x) be an eigenvector corresponding to the negativeeigenvalue of g(x). We can choose a smooth, strictly positive functionη :M → R+ such that
g′ := g − ηv ⊗ v < g.
Then (M, g′) is globally hyperbolic, g′ is smooth and g < g′. Thus wecan replace g by the smooth metric g′ having the same properties thatare required for g.
Recall that there is an isometry Φ : (M, g) → (R × N, h), where
N is a 3-dimensional manifold and the metric h can be written ash = −β(t, y)dt2 + κ(t, y) where β : R × N → (0,∞) is a smoothfunction and κ(t, · ) is a Riemannian metric on N depending smoothlyon t ∈ R. As in the main text we identify these isometric manifolds anddenote M = R×N . Also, for t ∈ R, recall that M(t) = (−∞, t)×N .We use parameters t1 > t0 > 0 and denote Mj = M(tj), j ∈ {0, 1}.We use the time-like geodesic µ = µg, µg : [−1, 1] → M0 on (M0, g)and the set Kj := J+
g (µ(−1)) ∩Mj with µ(−1) ∈ (−∞, t0)×N . Then
J+g (µ(−1)) ∩ Mj is compact. Also, there exists ε0 > 0 such that if
g is a Lorentz metric in M1 such that ‖g − g‖C0b(M1;g+) < ε0, then
g|K1< g|K1
. In particular, this implies that we have J+g (p) ∩M1 ⊂ K1
for all p ∈ K1. Later, we use this property to deduce that when gsatisfies the g-reduced Einstein equations in M1, with a source that issupported in K1 and has small enough norm is a suitable space, theng coincides with g in M1 \ K1 and satisfies g < g.
Let us use local coordinates on M1 and denote by ∇k = ∇Xkthe
covariant derivative with respect to the metric g in the direction Xk =

10 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
∂∂xk and by ∇k = ∇Xk
the covariant derivative with respect to themetric g to the direction Xk.
2.1.2. Reduced Ricci and Einstein tensors. Following [32] we recall that
Ricµν(g) = Ric(h)µν (g) +1
2(gµq
∂Γq
∂xν+ gνq
∂Γq
∂xµ)(14)
where Γq = gmnΓqmn,
Ric(h)µν (g) = −1
2gpq
∂2gµν∂xp∂xq
+ Pµν ,(15)
Pµν = gabgpsΓpµbΓ
sνa +
1
2(∂gµν∂xa
Γa + gνlΓlabg
aqgbd∂gqd∂xµ
+ gµlΓlabg
aqgbd∂gqd∂xν
).
Note that Pµν is a polynomial of gjk and gjk and first derivatives of gjk.The harmonic Einstein tensor is
Ein(h)jk (g) = Ric
(h)jk (g)−
1
2gpqRic(h)pq (g) gjk.(16)
The harmonic Einstein tensor is extensively used to study the Ein-stein equations in local coordinates where one can use the Minkowskispace R
4 as the background space. To do global constructions with abackground space (M, g) one uses the reduced Einstein tensor. The g-reduced Einstein tensor Eing(g) and the g-reduced Ricci tensor Ricg(g)are given by
(Eing(g))pq = (Ricg(g))pq −1
2(gjk(Ricgg)jk)gpq,(17)
(Ricg(g))pq = Ricpq(g)−1
2(gpn∇qF
n + gqn∇pFn)(18)
where F n are the harmonicity functions given by
F n = Γn − Γn, where Γn = gjkΓnjk, Γn = gjkΓn
jk,(19)
with Γnjk and Γn
jk being the Christoffel symbols for g and g, correspond-
ingly. Note that Γn depends also on gjk. As Γnjk − Γn
jk is the difference
of two connection coefficients, it is a tensor. Thus F n is tensor (ac-tually, a vector field), implying that both (Ricg(g))jk and (Eing(g))jkare 2-covariant tensors. A direct calculation shows that the g-reducedEinstein tensor is the sum of the harmonic Einstein tensor and a termthat is a zeroth order in g,
(Eing(g))µν = Ein(h)µν (g) +
1
2(gµq
∂Γq
∂xν+ gνq
∂Γq
∂xµ).(20)
We also use the wave operator
(21)
�gφ =4∑
p,q=1
(−det(g(x)))−1
2
∂
∂xp
((−det(g(x)))
1
2 gpq(x)∂
∂xqφ(x)
),

LINEARIZATION STABILITY RESULTS 11
which can be written as
�gφ = gjk∂j∂kφ− gpqΓnpq∂nφ = gjk∂j∂kφ− Γn∂nφ.(22)
2.1.3. Wave maps and reduced Einstein equations. Let us consider themanifold M1 = (−∞, t1) × N with a Cm-smooth metric g′, m ≥ 5,which is a perturbation of the metric g and satisfies the Einstein equa-tion
Ein(g′) = T ′ on M1,(23)
or equivalently,
Ric(g′) = ρ′, ρ′jk = T ′jk −
1
2((g′)nmT ′
nm)g′jk on M1.
Assume also that g′ = g in the domain A, where A = M1 \ K1 and‖g′ − g‖C2
b(M1,g+) < ε0, so that (M1, g
′) is globally hyperbolic. Note
that then T ′ = T in the set A. Then the metric g′ coincides with g inparticular in the set M− = R− ×N
We recall next the considerations of [12]. Let us consider the Cauchyproblem for the wave map f : (M1, g
′) → (M, g), namely
�g′,gf = 0 in M1,(24)
f = Id, in R− ×N,(25)
where M1 = (−∞, t1)×N ⊂M . In (24), �g′,gf = g′ · ∇2f is the wave
map operator, where ∇ is the covariant derivative of a map (M1, g′) →
(M, g), see [12, Ch. VI, formula (7.32)]. In local coordinates X :V → R
4 of V ⊂ M1, denoted X(z) = (xj(z))4j=1 and Y : W → R4
of W ⊂ M , denoted Y (z) = (yA(z))4A=1, the wave map f : M1 → Mhas the representation Y (f(X−1(x))) = (fA(x))4A=1 and the wave mapoperator in equation (24) is given by
(�g′,gf)A(x) = (g′)jk(x)
( ∂
∂xj∂
∂xkfA(x)− Γ′n
jk(x)∂
∂xnfA(x)(26)
+ΓABC(f(x))
∂
∂xjfB(x)
∂
∂xkfC(x)
)
where ΓABC denotes the Christoffel symbols of metric g and Γ′j
kl are theChristoffel symbols of metric g′. When (24) is satisfied, we say that fis wave map with respect to the pair (g′, g).
It follows from [12, App. III, Thm. 4.2 and sec. 4.2.2], that if g′ ∈Cm(M0), m ≥ 5 is sufficiently close to g in Cm(M0), then (4)-(5) has aunique solution f ∈ C0([0, t1];H
m−1(N)) ∩ C1([0, t1];Hm−2(N)). This
comes from the fact that the Christoffel symbols of g′ are in Cm−1(M0).Moreover, when m is even, using [58, Thm. 7] for f and ∂pt f , we seethat the solution f ∈ ∩m−1
p=0 Cp([0, t1];H
m−1−p(N)) ⊂ Cm−3(M0) and fdepends in Cm−3(M0) continuously on g′ ∈ Cm(M0). We note thatthese smoothness results for f are not optimal.

12 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
The wave map operator �g′,g is a coordinate invariant operator. Theimportant property of the wave maps is that, if f is wave map withrespect to the pair (g′, g) and g = f∗g
′ then, as follows from (26), theidentity map Id : x 7→ x is a wave map with respect to the pair (g, g)and, the wave map equation for the identity map is equivalent to (cf.[12, p. 162])
Γn = Γn, where Γn = gjkΓnjk, Γn = gjkΓn
jk(27)
where the Christoffel symbols Γnjk of the metric g are smooth functions.
Since g = g′ outside a compact set K1 ⊂ (0, t1) × N , we see thatthis Cauchy problem is equivalent to the same equation restricted tothe set (−∞, t1) × B0, where B0 ⊂ N is an open relatively compactset such that K1 ⊂ (0, t1]×B0 with the boundary condition f = Id on(0, t1] × ∂B0. Moreover, by the uniqueness of the wave map, we havef |M1\K1
= id so that f(K1) ∩M0 ⊂ K0.As the inverse function of the wave map f depends continuously, in
Cm−3b ([0, t1] × N, g+), on the metric g′ ∈ Cm(M0) we can also assume
that ε1 is so small that M0 ⊂ f(M1).Denote next g := f∗g
′, T := f∗T′, and ρ := f∗ρ
′ and define ρ =
T − 12(Tr T )g. Then g is Cm−6-smooth and the equation (23) implies
Ein(g) = T on M0.(28)
Since f is a wave map and g = f∗g′, we have that the identity map is
a (g, g)-wave map and thus g satisfies (27) and thus by the definitionof the reduced Einstein tensor, (18)-(17), we have
Einpq(g) = (Eing(g))pq on M0.
This and (28) yield the g-reduced Einstein equation
(Eing(g))pq = Tpq on M0.(29)
This equation is useful for our considerations as it is a quasilinear,hyperbolic equation on M0. Recall that g coincides with g in M0 \ K0.The unique solvability of this Cauchy problem is studied in e.g. [12,Thm. 4.6 and 4.13], [45].
2.1.4. Relation of the reduced Einstein equations and the original Ein-stein equation. The metric g which solves the g-reduced Einstein equa-tion Eing(g) = T is a solution of the original Einstein equations Ein(g) =
T if the harmonicity functions F n vanish identically. Next we recallthe result that the harmonicity functions vanish on M0 when
(Eing(g))jk = Tjk, on M0,(30)
∇pTpq = 0, on M0,
g = g, on M0 \ K0.

LINEARIZATION STABILITY RESULTS 13
To see this, let us denote Einjk(g) = Sjk, Sjk = gjngkmSnm, and T jk =
gjngkmTnm. Following standard arguments, see [12], we see from (17)that in local coordinates
Sjk − (Eing(g))jk =1
2(gjn∇kF
n + gkn∇jFn − gjk∇nF
n).
Using equations (30), the Bianchi identity ∇pSpq = 0, and the basic
property of Lorentzian connection, ∇kgnm = 0, we obtain
0 = 2∇p(Spq − T pq)
= ∇p(gqk∇kF
p + gpm∇mFq − gpq∇nF
n)
= gpm∇p∇mFq + (gqp∇n∇pF
n − gqp∇p∇nFn)
= gpm∇p∇mFq +W q(F )
where F = (F q)4q=1 and the operator
W : (F q)4q=1 7→ (gqk(∇p∇kFp −∇k∇pF
p))4q=1
is a linear first order differential operator whose coefficients are poly-nomial functions of gjk, g
jk, gjk, gjk and their first derivatives.
Thus the harmonicity functions F q satisfy on M0 the hyperbolicinitial value problem
gpm∇p∇mFq +W q(F ) = 0, on M0,
F q = 0, on M0 \ K0,
and as this initial Cauchy problem is uniquely solvable by [12, Thm.
4.6 and 4.13] or [45], we see that F q = 0 on M0. Thus equations (30)yield that the Einstein equations Ein(g) = T hold on M0.
We note that in the (g, g)-wave map coordinates, where F q = 0, thewave operator (22) has the form
�gφ = gjk∂j∂kφ− gpqΓnpq∂nφ.(31)
Thus, the scalar field equation �gφ−m2φ = 0 does not involve deriva-tives of g.
2.2. Linearization of Einstein equation and conservation law.
2.2.1. Linearized Einstein-scalar field equations. Next we consider thelinearized equations that are obtained as the derivatives of the solutionsof the non-linear, generalized Einstein-matter field equations (7).
Observe that if a family Fε = (F1ε ,F
2ε ) of sources and a family (gε, φε)
of functions are solutions of the non-linear reduced Einstein-scalar fieldequations (7) that depend smoothly on ε ∈ [0, ε0) in C15(M0) and sat-
isfy Fε|ε=0 = 0, (gε, φε)|ε=0 = (g, φ), then ∂εFε|ε=0 = f = (f 1, f 2), and

14 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
∂ε(gε, φε)|ε=0 = (g, φ), satisfies the linearized version of the equation(7) that has the form (in the local coordiantes),
�g gjk + Ajk(g, φ, ∂g, ∂φ) = f 1jk, in M0,(32)
�gφℓ +Bℓ(g, φ, ∂g, ∂φ) = f 2ℓ , ℓ = 1, 2, 3, . . . , L.
Here Ajk and Bℓ are first order linear differential operators which co-
efficients depend on g and φ. Let us write these equations in moreexplicit form. We see that the linearized reduced Einstein tensor is inlocal coordinates of the form
epq(g) := ∂ε(Einggε)pq|ε=0
= −1
2gjk∇j∇kgpq +
1
4(gnmgjk∇j∇kgnm)gpq
+Aabnpq ∇ngab +Bab
pq gab,
where Aabnpq (x) and Bab
pq(x) depend on gjk and its derivatives (theseterms can be computed explicitly using (15)). The linearized scalarfield stress-energy tensor is the linear first order differential operator
t(1)pq (g) + t(2)pq (φ) := ∂ε(Tjk(gε, φε))|ε=0
=
L∑
ℓ=1
(∂jφℓ ∂kφℓ + ∂jφℓ ∂kφℓ
−1
2gjkg
pq∂pφℓ ∂qφℓ −1
2gjkg
pq∂pφℓ ∂qφℓ
−1
2gjkg
pq∂pφℓ ∂qφℓ −1
2gjkg
pq∂pφℓ ∂qφℓ
−m2φℓφℓgjk −1
2m2φ2
ℓ gjk
).
Thus when Fε = (F1ε ,F
2ε ) is a family of sources and (gε, φε) a family
of functions that satisfy the non-linear reduced Einstein-scalar fieldequations (7), the ε-derivatives u = (g, φ) and ∂εFε|ε=0 = f = (f 1, f 2)satisfy in local (g, g)-wave coordinates
epq(g)− t(1)pq (g)− t(2)pq (φ) = f 1pq,(33)
�gφℓ − gnmgkj(∂n∂jφℓ + Γpnj∂pφℓ)gmk −m2φℓ = f 2
ℓ .
We call this linearized Einstein-scalar field equations.
2.2.2. Linearization of the conservation law. Assume that (g, φ) andF = (F1,F2) satisfy equation (7). Then the conservation law (8) gives

LINEARIZATION STABILITY RESULTS 15
for all j = 1, 2, 3, 4 equations (see [12, Sect. 6.4.1])
0 =1
2∇g
p(gpkTjk)
=1
2∇g
p(gpk(Tjk(g, φ) + F1
jk))
=L∑
ℓ=1
(gpk∇gp∂kφℓ) ∂jφℓ − (m2
ℓφℓ∂pφℓ)δpj +
1
2∇g
p(gpkF1
jk)
=L∑
ℓ=1
(gpk∇gp∂kφℓ −m2
ℓφℓ) ∂jφℓ +1
2∇g
p(gpkF1
jk).
This yields by (7)
1
2gpk∇g
pF1jk +
L∑
ℓ=1
F2ℓ ∂jφℓ = 0, j = 1, 2, 3, 4.(34)
Next assume that (gε, φε) and Fε satisfy equation (7) and C1-smoothfunctions of ε ∈ (−ε0, ε0) taking values in H1(N)-tensor fields, and
(gε, φε)|ε=0 = (g, φ) and Fε|ε=0 = 0. Denote (f 1, f 2) = ∂εFε|ε=0. Thenby taking ε-derivative of (34) at ε = 0 we get
1
2gpk∇pf
1jk +
L∑
ℓ=1
f 2ℓ ∂jφℓ = 0, j = 1, 2, 3, 4.(35)
We call this the linearized conservation law.
3. Analysis for the Einstein-scalar field equations
Let we consider the solutions (g, φ) of the equations (7) with source
F . To consider their local existence, let us denote u := (g, φ)− (g, φ).It follows from by [5, Cor. A.5.4] that Kj = J+
g (p−)∩M j is compact.
Since g < g, we see that if r0 above is small enough, for all g ∈V(r0), see subsection 1.0.2, we have g|K1
< g|K1. In particular, we
have J+g (p
−) ∩M1 ⊂ J+g (p
−).
Let us assume that F is small enough in the norm C4b (M0) and that
it is supported in a compact set K = Jg(p−)∩ ([0, t0]×N) ⊂ M0. Then
we can write the equations (7) for u in the form
Pg(u)(u) = F , x ∈M0,(36)
u = 0 in (−∞, 0)×N , where
Pg(u)(u) := gjk(x; u)∂j∂ku(x) +H(x, u(x), ∂u(x)),
(gjk(x; u))4j,k=1 = (gjk(x))−1, where (g, φ) = u+ (g, φ), and (x, v, w) 7→
H(x, v, w) is a smooth function which is a second order polynomialin w with coefficients being smooth functions of v and derivatives ofg, [97]. Note that when the norm of F in C4
b (M0) is small enough,

16 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
we have supp (u) ⊂ K. We note that one could also consider non-compactly supported sources or initial data, see [19]. Also, the scalarfield-Einstein system can be considered with much less regularity thatis done below, see [14, 15].
Let s0 ≥ 4 be an even integer. Below we will consider the solutions
u = (g − g, φ − φ) and the sources F as sections of the bundle BL
on M0. We will consider these functions as elements of the section-valued Sobolev spaces Hs(M0;B
L) etc. Below, we omit the bundle BL
in these notations and denote Hs(M0;BL) = Hs(M0). We use the same
convention for the spaces
Es =
s⋂
j=0
Cj([0, t0];Hs−j(N)), s ∈ N.
Note that Es ⊂ Cp([0, t0] × N) when 0 ≤ p < s − 2. Local existenceresults for (36) follow from the standard techniques for quasi-linearequations developed e.g. in [45] or [58], or [90, Section 9]. These yieldthat when F is supported in the compact set K and ‖F‖Es0 < c0,where c0 > 0 is small enough, there exists a unique function u satisfyingequation (36) on M0 with the source F . Moreover,
‖u‖Es0 ≤ C1‖F‖Es0 .(37)
For a detailed analysis, see Appendix B in [61].
3.1. Linearized conservation law and harmonicity conditions.
3.1.1. Lagrangian distributions. Let us recall definition of the conormaland Lagrangian distributions that we will use below. Let X be a man-ifold of dimension n and Λ ⊂ T ∗X \ {0} be a Lagrangian submanifold.Let φ(x, θ), θ ∈ R
N be a non-degenerate phase function that locallyparametrizes Λ. We say that a distribution u ∈ D′(X) is a Lagrangiandistribution associated with Λ and denote u ∈ Im(X ; Λ), if in localcoordinates u can be represented as an oscillatory integral,
u(x) =
∫
RN
eiφ(x,θ)a(x, θ) dθ,(38)
where a(x, θ) ∈ Sm+n/4−N/2(X ;RN), see [38, 49, 78].In particular, when S ⊂ X is a submanifold, its conormal bundle
N∗S = {(x, ξ) ∈ T ∗X \ {0}; x ∈ S, ξ ⊥ TxS} is a Lagrangian sub-manifold. If u is a Lagrangian distribution associated with Λ1 whereΛ1 = N∗S, we say that u is a conormal distribution.
Let us next consider the case when X = Rn and let (x1, x2, . . . , xn) =
(x′, x′′, x′′′) be the Euclidean coordinates with x′ = (x1, . . . , xd1), x′′ =
(xd1+1, . . . , xd1+d2), x′′′ = (xd1+d2+1, . . . , xn). If S1 = {x′ = 0} ⊂ R
n,Λ1 = N∗S1 then u ∈ Im(X ; Λ1) can be represented by (38) with N = d1and φ(x, θ) = x′· θ.

LINEARIZATION STABILITY RESULTS 17
Next we recall the definition of Ip,l(X ; Λ1,Λ2), the space of the dis-tributions u in D′(X) associated to two cleanly intersecting Lagrangianmanifolds Λ1,Λ2 ⊂ T ∗X \{0}, see [21, 38, 78]. These classes have beenwidely used in the study of inverse problems, see [16, 29]. Let us startwith the case when X = R
n.Let S1, S2 ⊂ R
n be the linear subspaces of codimensions d1 and d1+d2, respectively, S2 ⊂ S1, given by S1 = {x′ = 0}, S2 = {x′ = x′′ = 0}.Let us denote Λ1 = N∗S1, Λ2 = N∗S2. Then u ∈ Ip,l(Rn;N∗S1, N
∗S2)if and only if
u(x) =
∫
Rd1+d2
ei(x′·θ′+x′′·θ′′)a(x, θ′, θ′′) dθ′dθ′′,
where the symbol a(x, θ′, θ′′) belongs in the product type symbol classSµ1,µ2(Rn; (Rd1 \ 0)× R
d2) that is the space of function a ∈ C∞(Rn ×R
d1 × Rd2) that satisfy
|∂γx∂αθ′∂
βθ′′a(x, θ
′, θ′′)| ≤ CαβγK(1 + |θ′|+ |θ′′|)µ1−|α|(1 + |θ′′|)µ2−|β|(39)
for all x ∈ K, multi-indexes α, β, γ, and compact sets K ⊂ Rn. Above,
µ1 = p+ l − d1/2 + n/4 and µ2 = −l − d2/2.When X is a manifold of dimension n and Λ1,Λ2 ⊂ T ∗X \ {0}
are two cleanly intersecting Lagrangian manifolds, we define the classIp,l(X ; Λ1,Λ2) ⊂ D′(X) to consist of locally finite sums of distributionsof the form u = Au0, where u0 ∈ Ip,l(Rn;N∗S1, N
∗S2) and S1, S2 ⊂ Rn
are the linear subspace of codimensions d1 and d1+d2, respectively, suchthat S2 ⊂ S1, and A is a Fourier integral operator of order zero with acanonical relation Σ for which Σ ◦ (N∗S1)
′ ⊂ Λ′1 and Σ ◦ (N∗S2)
′ ⊂ Λ′2.
Here, for Λ ⊂ T ∗X we denote Λ′ = {(x,−ξ) ∈ T ∗X ; (x, ξ) ∈ Λ}, andfor Σ ⊂ T ∗X × T ∗X we denote Σ′ = {(x, ξ, y,−η); (x, ξ, y, η) ∈ Σ}.
In most cases, below X = M . We denote then Ip(M ; Λ1) = Ip(Λ1)and Ip,l(M ; Λ1,Λ2) = Ip,l(Λ1,Λ2). Also, I(Λ1) = ∪p∈RI
p(Λ1).By [38, 78], microlocally away from Λ1 and Λ0,
Ip,l(Λ0,Λ1) ⊂ Ip+l(Λ0 \ Λ1) and Ip,l(Λ0,Λ1) ⊂ Ip(Λ1 \ Λ0),(40)
respectively. Thus the principal symbol of u ∈ Ip,l(Λ0,Λ1) is well de-fined on Λ0 \Λ1 and Λ1 \Λ0. We denote I(Λ0,Λ1) = ∪p,q∈RI
p,q(Λ0,Λ1).Below, when Λj = N∗Sj, j = 1, 2 are conormal bundles of smooth
cleanly intersecting submanifolds Sj ⊂ M of codimension mj , wheredim (M) = n, we use the traditional notations,
Iµ(S1) = Iµ+m1/2−n/4(N∗S1), Iµ1,µ2(S1, S2) = Ip,l(N∗S1, N∗S2),(41)
where p = µ1 + µ2 +m1/2 − n/4 and l = −µ2 −m2/2, and call suchdistributions conormal distributions associated to S1 or product typeconormal distributions associated to S1 and S2, respectively. By [38],Iµ(X ;S1) ⊂ Lp
loc(X) for µ < −m1(p− 1)/p, 1 ≤ p <∞.For the wave operator �g on the globally hyperbolic manifold (M, g)
Char (�g) is the set of light-like vectors with respect to g, and (y, η) ∈

18 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
Θx,ξ if and only if there is t ∈ R such that (y, η) = (γgx,b(t), γgx,b(t))
where γgx,b is a light-like geodesic with respect to the metric g with the
initial data (x, b) ∈ TM , and a = η♭, b = ξ♭.Let P = �g + B0 + Bj∂j , where B0 and Bj are tensors. Then
P is a classical pseudodifferential operator of real principal type andorder m = 2 on M , and [78], see also [64], P has a parametrix Q ∈Ip,l(∆′
T ∗M ,ΛP ), p = 12−m, l = −1
2, where ∆T ∗M = N∗({(x, x); x ∈
M}) and Λg ⊂ T ∗M × T ∗M is the Lagrangian manifold associated tothe canonical relation of the operator P , that is,
Λg = {(x, ξ, y,−η); (x, ξ) ∈ Char (P ), (y, η) ∈ Θx,ξ},(42)
where Θx,ξ ⊂ T ∗M is the bicharacteristic of P containing (x, ξ). When(M, g) is a globally hyperbolic manifold, the operator P has a causalinverse operator, see e.g. [5, Thm. 3.2.11]. We denote it by P−1 and by[78], we have P−1 ∈ I−3/2,−1/2(∆′
T ∗M ,Λg). We will repeatedly use thefact (see [38, Prop. 2.1]) that if F ∈ Ip(Λ0) and Λ0 intersects Char(P )transversally so that all bicharacterestics of P intersect Λ0 only finitelymany times, then (�g + B0 + Bj∂j)
−1F ∈ Ip−3/2,−1/2(Λ0,Λ1) whereΛ′
1 = Λg ◦ Λ′0 is called the flowout from Λ0 on Char(P ), that is,
Λ1 = {(x,−ξ); (x, ξ, y,−η) ∈ Λg, (y, η) ∈ Λ0}.
3.1.2. The linearized Einstein equations and the linearized conserva-tion law. We will below consider sources F = εf(x) and solution uεsatisfying (36), where f = (f (1), f (2)).
We consider the linearized Einstein equations and the linearized waveu(1) = ∂εuε|ε=0. It satisfies the linearized Einstein equations (9) thatwe write as
�gu(1) + V (x, ∂x)u
(1) = f ,(43)
where v 7→ V (x, ∂x)v is a linear first order partial differential operatorwith coefficients depending on the derivatives of g.
Assume that Y ⊂M0 is a 2-dimensional space-like submanifold andconsider local coordinates defined in V ⊂ M0. Moreover, assume thatin these local coordinates Y ∩V ⊂ {x ∈ R
4; xjbj = 0, xjb′j = 0}, where
b′j ∈ R and let f = (f (1), f (2)) ∈ In(Y ), n ≤ n0 = −17, be defined by
f(x1, x2, x3, x4) = Re
∫
R2
ei(θ1bm+θ2b′m)xm
σf (x, θ1, θ2) dθ1dθ2.(44)
Here, we assume that σf (x, θ), θ = (θ1, θ2) is a BL-valued classicalsymbol and we denote the principal symbol of f by c(x, θ) = σp(f)(x, θ),
or component-wise, ((c(1)jk (x, θ))
4j,k=1, (c
(2)ℓ (x, θ))Lℓ=1). When x ∈ Y and
ξ = (θ1bm + θ2b′m)dx
m so that (x, ξ) ∈ N∗Y , we denote the value ofthe principal symbol f at (x, ξ) by c(x, ξ) = c(x, θ), that is component-
wise, c(1)jk (x, ξ) = c
(1)jk (x, θ) and c
(2)ℓ (x, ξ) = c
(2)ℓ (x, θ). We say that this
is the principal symbol of f at (x, ξ), associated to the phase function

LINEARIZATION STABILITY RESULTS 19
φ(x, θ1, θ2) = (θ1bm + θ2b′m)x
m. The above defined principal symbolscan be defined invariantly, see [42].
We will below consider what happens when f = (f (1), f (2)) ∈ In(Y )satisfies the linearized conservation law (10). Roughly speaking, thesefour linear conditions imply that the principal symbol of the source f
satisfies four linear conditions. Furthermore, the linearized conserva-tion implies that also the linearized wave u(1) produced by f satisfiesfour linear conditions that we call the linearized harmonicity condi-tions, and finally, the principal symbol of the wave u(1) has to satisfyfour linear conditions. Next we explain these conditions in detail.
When (10) is valid, we have
glkξlc(1)kj (x, ξ) = 0, for j ≤ 4 and ξ ∈ N∗
xY .(45)
We say that this is the linearized conservation law for the principalsymbols. Note that Iµ(Y ) ⊂ Cs(M0) when s ≤ −µ − 3. We will lateruse such indexes µ so that we can use s = 13.
3.1.3. A harmonicity condition for the linearized solutions. Assumethat (g, φ) satisfy equations (7) and the conservation law (8) is valid.The conservation law (8) and the g-reduced Einstein equations (7) im-ply, see e.g. [12, 90], that the harmonicity functions Γj = gnmΓj
nm
satisfy
gnmΓjnm = gnmΓj
nm.(46)
Next we denote u(1) = (g1, φ1) = (g, φ), and discuss the implicationsof this for the metric component g of the solution of the linearizedEinstein equations.
We do next calculations in local coordinates of M0 and denote ∂k =∂
∂xk . Direct calculations show that hjk = gjk√−det(g) satisfies ∂kh
kq =
−Γqknh
nk. Then (46) implies that
∂khkq = −Γq
knhnk.(47)
We call (47) the harmonicity condition for the metric g.Assume now that gε and φε satisfy (7) with source F = εf where
ε > 0 is a small parameter. We define hjkε = gjkε√
−det(gε) and denote
gjk = ∂ε(gε)jk|ε=0, gjk = ∂ε(gε)
jk|ε=0, and hjk = ∂εhjkε |ε=0.
The equation (47) yields then2
∂khkq = −Γq
knhnk.(48)
A direct computation shows that
hab = (−det(g))1/2κab,
2The treatment on this de Donder-type gauge condition is known in the folkloreof the field. For a similar gauge condition to (48) in harmonic coordinates, see [72,pages 6 and 250], or [67, formulas 107.5, 108.7, 108.8], or [46, p. 229-230].

20 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
where κab = gab − 12gabgqpg
pq. Thus (48) gives
∂a((−det(g))1/2κab) = −Γbac(−det(g))1/2κac(49)
that implies ∂aκab + κnbΓa
an + κanΓban = 0, or equivalently,
∇aκab = 0.(50)
We call (50) the linearized harmonicity condition for g. Writing thisfor g, we obtain
−gan∂agnj +1
2gpq∂j gpq = mpq
j gpq(51)
where mj depend on gpq and its derivatives. On similar conditionsfor the polarization tensor, see [85, form. (9.58) and example 9.5.a, p.416].
3.1.4. Properties of the principal symbols of the waves. Let K ⊂ M0
be a light-like submanifold of dimension 3 that in local coordinatesX : V → R
4, xk = Xk(y) is given by K ∩ V ⊂ {x ∈ R4; bkx
k = 0},
where bk ∈ R are constants. Assume that the solution u(1) = (g, φ) ofthe linear wave equation (43) with the right hand side vanishing in Vis such that u(1) ∈ Iµ(K) with µ ∈ R. Below we use µ = n− 3
2where
n ∈ Z−, n ≤ n0 = −18. Let us write gjk as an oscillatory integral usinga phase function ϕ(x, θ) = bkx
kθ, and a symbol ajk(x, θ) ∈ Snclas(R
4,R),
gpq(x1, x2, x3, x4) = Re
∫
R
ei(θbmxm)apq(x, θ) dθ,(52)
where n = µ + 12. We denote the (positively homogeneous) principal
symbol of apq(x, θ) by σp(gpq)(x, θ). When x ∈ K and ξ = θbkdxk so
that (x, ξ) ∈ N∗K, we denote the value of σp(gpq) at (x, θ) by ajk(x, ξ),that is, ajk(x, ξ) = σp(gpq)(x, θ).
Then, if gjk satisfies the linearized harmonicity condition (46), itsprincipal symbol ajk(x, ξ) satisfies
−gmn(x)ξmvnj +1
2ξj(g
pq(x)vpq) = 0, vpq = apq(x, ξ),(53)
where j = 1, 2, 3, 4 and ξ = θbkdxk ∈ N∗
xK. If (53) holds, we saythat the harmonicity condition for the symbol is satisfied for a(x, ξ) at(x, ξ) ∈ N∗K.
4. A model with adaptive source function
4.1. Initial value problem with adaptive source functions. Letus define some physical fields and introduce a model as a system ofpartial differential equations. Later we will motivate this system bydiscussion of the corresponding Lagrangians, but we postpone this dis-cussion to a last section as it is not completely rigorous.
We assume that there are C∞-background fields g, φ, on M .

LINEARIZATION STABILITY RESULTS 21
We consider a Lorentzian metric g on M0 and φ = (φℓ)Lℓ=1 where φℓ
are scalar fields on M0 = (−∞, t0)×N .Let P = Pjk(x)dx
jdxk be a symmetric tensor on M0, correspondingbelow to a direct perturbation to the stress energy tensor, and Q =(Qℓ(x))
Kℓ=1 where Qℓ(x) are real-valued functions on M0, where K ≥
L+ 1. We denote by V(φℓ;Sℓ) the potential functions of the fields φℓ,
V(φℓ;Sℓ) =1
2m2(φℓ +
1
m2Sℓ
)2.(54)
These potentials depend on the source variables Sℓ. The way how Sℓ,called below the adaptive source functions, depend on other fields is
explained later. We assume that there are smooth background fields P
and Q. For a while we consider the case when P = 0 and Q = 0, anddiscuss later the generalization to non-vanishing background fields.
Using the φ and P fields, we define the stress-energy tensor
Tjk =L∑
ℓ=1
(∂jφℓ ∂kφℓ −1
2gjkg
pq∂pφℓ ∂qφℓ − V(φℓ;Sℓ)gjk) + Pjk.(55)
We assume that P and Q are supported on K = J+g (p
−) ∩M0. Let
us represent the stress energy tensor (55) in the form
Tjk = Pjk + Zgjk +Tjk(g, φ), Z = −
L∑
ℓ=1
(Sℓφℓ +1
2m2S2ℓ ),
Tjk(g, φ) =
L∑
ℓ=1
(∂jφℓ ∂kφℓ −1
2gjkg
pq∂pφℓ ∂qφℓ −1
2m2φ2
ℓgjk),
where we call Z the stress energy density caused by the sources Sℓ.Now we are ready to formulate the direct problem for the adaptive
Einstein-scalar field equations. Let g and φ satisfy
Eing(g) = Pjk + Zgjk +Tjk(g, φ), Z = −L∑
ℓ=1
(Sℓφℓ +1
2m2S2ℓ ),(56)
�gφℓ − V ′(φℓ;Sℓ) = 0 in M0, ℓ = 1, 2, 3, . . . , L,
Sℓ = Sℓ(g, φ,∇φ,Q,∇Q,P,∇gP ), in M0,
g = g, φℓ = φℓ, in (−∞, 0)×N.
Above, V ′(φ; s) = ∂φV(φ; s) so that V ′(φℓ;Sℓ) = m2φℓ+Sℓ. We assume
that the background fields g, φ, satisfy these equations with Q = 0 and
P = 0.We consider here P = (Pjk)
4j,k=1 and Q = (Qℓ)
Kℓ=1 as fields that we
can control and call those the controlled source fields. Local existenceof the solution for small sources P and Q is considered in Appendix B.
To obtain a physically meaningful model, we need to consider howthe adaptive source functions Sℓ should be chosen so that the physical

22 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
conservation law in relativity
∇k(gkpTpq) = 0(57)
is satisfied. Here ∇ = ∇g is the connection corresponding to the metricg.
We note that the conservation law is a necessary condition for theequation (56) to have solutions for which Eing(g) = Ein(g), i.e., thatthe solutions of (56) are solutions of the Einstein field equations.
The functions Sℓ(g, φ,∇φ,Q,∇Q,P,∇gP ) model the devices that we
use to perform active measurements. Thus, even though the ConditionS below may appear quite technical, this assumption can be viewed asthe instructions on how to build a device that can be used to measurethe structure of the spacetime far away. Outside the support of themeasurement device (that contain the union of the supports of Q andP ) we have just assumed that the standard coupled Einstein-scalarfield equations hold, c.f. (58). We can consider them in the form
Sℓ(g, φ,∇φ,Q,∇Q,P,∇gP ) = Qℓ + S2nd
ℓ (g, φ,∇φ,Q,∇Q,P,∇gP )
for ℓ = 1, 2, . . . , L where Qℓ are the primary sources and S2ndℓ , that
depend also on Qℓ with ℓ = L + 1, L + 2, . . . , K, corresponds to theresponse of the measurement device that forces the conservation law tobe valid.
The solution (g, φ) of (56) is a solution of the equations (7) when wedenote
F1jk = Pjk + Zgjk,
F2ℓ = V ′(φℓ;Sℓ)− V ′(φℓ; 0) = Sℓ.
Our next goal is to construct suitable adaptive source functions Sℓ andconsider what kind of sources F1 and F2 of the above form can beobtained by varying P and Q.
We will consider adaptive source functions Sℓ satisfying the followingconditions:
Condition S:The adaptive source functions Sℓ(g, φ,∇φ,Q,∇Q,P,∇
gP ) have the fol-lowing properties:
(i) Denoting c = ∇φ, C = ∇gP , and H = ∇Q we assume thatSℓ(g, φ, c, Q,H, P, C) are smooth non-linear functions, of the point-wise values gjk(x), φ(x),∇φ(x), Q(x),∇Q(x), P (x), and ∇gP (x), de-
fined near (g, φ, c, Q,H, P, C) = (g, φ,∇φ, 0, 0, 0, 0), that satisfy
Sℓ(g, φ, c, 0, 0, 0, 0) = 0.(58)
(ii) We assume that Sℓ is independent of P (x) and the dependencyof S on ∇gP and ∇Q is only due to the dependency in the term

LINEARIZATION STABILITY RESULTS 23
gpk∇gp(Pjk + Zgjk) = gpk∇g
pPjk + ∇gjQK , associated to the divergence
of the perturbation of T , that is, there exist functions Sℓ so that
Sℓ(g, φ, c, Q,H, P, C) = Sℓ(g, φ, c, Q,R), R = (gpk∇gp(Pjk +QKgjk))
4j=1.
Below, denote R = gpk∇pPjk + ∇jQK . Note that we still are consid-
ering the case when Q = 0 and P = 0 so that R = 0, too. This impliesthat for the background fields that adaptive source functions Sℓ vanish.
To simplify notations, we also denote below Sℓ just by Sℓ and indicatethe function which we use by the used variables in these functions.
Below we will denote Q = (Q′, QK), Q′ = (Qℓ)
K−1ℓ=1 . There are exam-
ples when the background fields (g, φ) and the adaptive source functionsSℓ exists and satisfy the Condition S.
Our next aim is to prove the following:
Theorem 4.1. Let L ≥ 5 and assume that Q = 0 and P = 0 so
that R = 0. Moreover, assume that Condition A is valid. Then forall permutations σ : {1, 2, . . . , L} → {1, 2, . . . , L} there exists functionsSℓ,σ satisfying Condition S such that
(i) For all x ∈ Ug,σ the differential of
Sσ(g, φ,∇φ, Q,R) = (Sℓ,σ(g, φ,∇φ, Q,R))Lℓ=1
with respect to Q and R, that is, the map
DQ,RSσ(g(x), φ(x),∇φ(x), Q,R)|Q=Q(x),R=R(x) : RK+4 → R
L(59)
is surjective.
(ii) The adaptive source functions Sσ are such that for (Qℓ)Kℓ=1 and
(Pjk) that are sufficiently close to Q = 0 and P = 0 in the C3b (M0)-
topology and supported in Ug,σ the equations (56) with source functionsSσ have a unique solution (g, φ) and the conservation law (57) is valid.
(iii) Under the same assumptions as in (ii), when (g, φ) is a solutionof (56) with the controlled source functions P and Q, we have QK = Z.This means that the physical field Z can be directly controlled.
Proof. As one can enumerate the ℓ-indexes of the fields φℓ as onewishes, it is enough to prove the claim with one σ. We consider belowthe case when σ = Id.
Consider a symmetric (0,2)-tensor P and a scalar functions Qℓ thatare C3-smooth and compactly supported in Ug,σ. Let [Pjk(x)]
4j,k=1 be
the coefficients of P in local coordinates and Q(x) = (Qℓ(x))Lℓ=1.
To obtain adaptive required adaptive source functions, let us startto consider implications of the conservation law (57). To this end,consider C2-smooth functions Sℓ(x) on Ug,σ.

24 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
Note that since [∇p,∇n] = [∂p, ∂n] = 0 (see [12, Sect. III.6.4.1]),
∇p(gpjTjk(g, φ) =
L∑
ℓ=1
∇pgpj(∂jφℓ ∂kφℓ −
1
2gjkg
nm∂nφℓ ∂mφℓ −1
2m2φ2
ℓgjk)
=
L∑
ℓ=1
(gpj∇p∂jφℓ) ∂kφℓ +
L∑
ℓ=1
(gpj∂jφℓ∇p∂kφℓ)
−1
2
L∑
ℓ=1
δpk(gnm(∇p∂nφℓ) ∂mφℓ + gnm∂nφℓ (∇p∂mφℓ))−
L∑
ℓ=1
m2δpkφℓ∂pφℓ
=
L∑
ℓ=1
(gpj∇p∂jφℓ) ∂kφℓ +
L∑
ℓ=1
(gpj∂jφℓ (∇p∂kφℓ))
−1
2
L∑
ℓ=1
(gnm∂mφℓ (∇n∂kφℓ) + gnm∂nφℓ (∇m∂kφℓ))−
L∑
ℓ=1
m2φℓ∂kφℓ
=L∑
ℓ=1
(gpj∇p∂jφℓ −m2φℓ) ∂kφℓ.
Thus conservation law (57) gives for all j = 1, 2, 3, 4 equations
0 = ∇gp(g
pkTjk)
= ∇gp(g
pk(Tjk(g, φ) + Pjk + Zgjk))
=L∑
ℓ=1
(gpk∇gp∂kφℓ) ∂jφℓ − (m2
ℓφℓ∂pφℓ)δpj −∇g
p(gpkgjk(Sℓφℓ+
1
2m2S2ℓ ) + gpkPjk)
=L∑
ℓ=1
(gpk∇gp∂kφℓ −m2
ℓφℓ) ∂jφℓ −∇gp(g
pkgjk(Sℓφℓ+1
2m2S2ℓ ) + gpkPjk)
=
L∑
ℓ=1
Sℓ ∂jφℓ −∇gp(g
pkgjk(Sℓφℓ+1
2m2S2ℓ )) + gpk∇g
pPjk
=
(L∑
ℓ=1
Sℓ ∂jφℓ
)− ∂j
(L∑
ℓ=1
Sℓφℓ+1
2m2S2ℓ
)+ gpk∇g
pPjk.
Summarizing, the conservation law gives(
L∑
ℓ=1
Sℓ ∂jφℓ
)− ∂j
(L∑
ℓ=1
Sℓφℓ +1
2m2S2ℓ
)+ gpk∇g
pPjk = 0,(60)
for j = 1, 2, 3, 4.Recall that the field Z has the definition
L∑
ℓ=1
Sℓφℓ +1
2m2S2ℓ = −Z.(61)

LINEARIZATION STABILITY RESULTS 25
Then, the conservation law (57) holds if we have
L∑
ℓ=1
Sℓ ∂jφℓ = −gpk∇gpV jk, V jk = (Pjk + gjkZ),(62)
for j = 1, 2, 3, 4.Equations (61) and (62) give together five point-wise equations for
the functions S1, . . . , SL.Recall that we consider here the case when σ = Id. By Condition
A, at any x ∈ Ug,σ that the 5 × 5 matrix (Bσjk(φ(x),∇φ(x)))j,k≤5 is
invertible, where
(Bσjk(φ(x),∇φ(x)))j,k≤5 =
(( ∂jφℓ(x))j≤4, ℓ≤5
(φℓ(x))ℓ≤5
).
We consider a RK valued function Q(x) = (Q′(x), QK(x)), where
Q′ = (Qℓ)K−1ℓ=1 .
Also, below Rj = gpk∇gpV jk, V jk = Pjk + gjkZ and we require that
the identity
QK = Z(63)
holds.Motivated by equations (61), (62), and (63), our next aim is to con-
sider a point x ∈ Ug,σ, and construct scalar functions Sσ,ℓ(φ,∇φ,Q′, QK , R, g),
ℓ = 1, 2, . . . , L that satisfy
5∑
ℓ=1
Sσ,ℓ(φ,∇φ,Q′, QK , R, g) ∂jφℓ = −Rj −
L∑
ℓ=6
Qσ,ℓ ∂jφℓ,(64)
5∑
ℓ=1
Sσ,ℓ(φ,∇φ,Q′, QK , R, g)φℓ = −
(QK +
L∑
ℓ=6
Qσ,ℓφℓ +
+
L∑
ℓ=1
1
2m2Sσ,ℓ(φ,∇φ,Q
′, QK , R, g)2).
Let
(Yσ(φ,∇φ))(x) = ψ(x)(Bσ(φ,∇φ))−1, for x ∈ Ug,σ,
(Yσ(φ,∇φ))(x) = 0, for x 6∈ Ug,σ,
where ψ ∈ C∞0 (Ug,σ) has value 1 in supp (Q) ∪ supp (P ).
Then we define Sσ,ℓ = Sσ,ℓ(g, φ,∇φ,Q′, QK , R), ℓ = 1, 2, . . . , L, to be
the solution of the system
(Sσ,ℓ)ℓ≤5 = Yσ(φ,∇φ)
((−Rj −
∑Lℓ=6Qσ,ℓ ∂jφℓ)j≤4
−QK −∑L
ℓ=6Qσ,ℓφℓ −∑L
ℓ=11
2m2S2σ,ℓ
)(65)
(Sσ,ℓ)ℓ≥6 = (Qℓ)ℓ≥6.

26 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
When Q and R are sufficiently small, this equation can be solved point-wisely, at each point x ∈ Ug,σ, using iteration by the Banach fixed pointtheorem.
Let
(Kσjk(φ(x),∇φ(x)))j,k≤5 =
(( ∂jφℓ(x))j≤4, 6≤ℓ≤L
(φℓ(x))6≤ℓ≤L
).
Then we see that the differential of Sσ = (Sσ,ℓ)Lℓ=1 with respect to
(Q′, QK , R) at (Q,R) = (0, 0), that is,
(66)
DQ′,QK ,RSσ(g, φ,∇φ, Q′, QK , R)|Q=0,R=0 : R
K+4 → RL,
(Q′, QK , R) 7→ −
(Yσ(φ,∇φ) Yσ(φ,∇φ)K(φ,∇φ)
0 Iσ
)(
RQK
)
Q′
,
is surjective, where Iσ = [δk,j+5]k≤K−1, j≤L−5, ∈ R(K−1)×(L−5). Hence
(i) is valid.By their construction, the functions Sσ = (Sσ,ℓ)
Lℓ=1 satisfy the equa-
tions (61) and (62) for all x ∈ Ug,σ and also equation (63) holds.Hence (iii) is valid.Above, the equation (62) is valid by the construction of functions
(Sℓ)Lℓ=1. Thus the conservation law is valid. This proves (ii). �
Note that as the adaptive source functions Sℓ were constructed inTheorem 4.1 using inverse function theorem, the results of Theorem
4.1 are valid also if Q and P are sufficiently small non-vanishing fields
and g and φ satisfy the Einstein scalar field equations (56) with these
background fields. Next we return to the case when P = 0 and Q = 0.
5. Proof of the microlocal linearization stabililty
Below we consider the case when P = 0 and Q = 0 and use theadaptive source functions Sℓ constructed in Theorem 4.1 and its proof.
Assume that Y ⊂M0 is a 2-dimensional space-like submanifold andconsider local coordinates defined in V ⊂ M0. Moreover, assume thatin these local coordinates Y ∩V ⊂ {x ∈ R
4; xjbj = 0, xjb′j = 0}, whereb′j ∈ R and let p ∈ In(Y ), n ≤ n0 = −17, be defined by
pjk(x1, x2, x3, x4) = Re
∫
R2
ei(θ1bm+θ2b′m)xm
vjk(x, θ1, θ2) dθ1dθ2.(67)
Here, we assume that vjk(x, θ), θ = (θ1, θ2) are classical symbols andwe denote their principal symbols by σp(pjk)(x, θ). When x ∈ Y andξ = (θ1bm+ θ2b
′m)dx
m so that (x, ξ) ∈ N∗Y , we denote the value of the
principal symbol σp(p) at (x, θ1, θ2) by v(a)jk (x, ξ), that is, v
(a)jk (x, ξ) =
σp(pjk)(x, θ1, θ2), and say that it is the principal symbol of pjk at (x, ξ),

LINEARIZATION STABILITY RESULTS 27
associated to the phase function φ(x, θ1, θ2) = (θ1bm + θ2b′m)x
m. Theabove defined principal symbols can be defined invariantly, see [42].
We assume that also q′, z ∈ In(Y ) have representations (67) withclassical symbols. Below we consider symbols in local coordinates.Let us denote the principal symbols of p,q′, z ∈ In(Y ) by v(a)(x, ξ),
w(a)1 (x, ξ), w
(a)2 (x, ξ), respectively and let v(b)(x, ξ) and w
(b)2 (x, ξ) denote
the sub-principal symbols of p and z, correspondingly, at (x, ξ) ∈ N∗Y .We will below consider what happens when (pjk + zgjk) ∈ In(Y )
satisfies
glk∇gl (pjk + zgjk) ∈ In(Y ), j = 1, 2, 3, 4.(68)
Note that a priori this function is only in In+1(Y ), so the assumption
(68) means that glk∇gl (pjk + zgjk) is one degree smoother than it a
priori should be.When (68) is valid, we say that the leading order of singularity of
the wave satisfies the linearized conservation law. This corresponds tothe assumption that the principal symbol of the sum of divergence ofthe first two terms appearing in the stress energy tensor on the righthand side of (56) vanishes.
By [42], the identity (68) is equivalent to the vanishing of the prin-cipal symbol on N∗Y , that is,
glkξl(v(a)kj (x, ξ) + gkj(x)w
(a)2 (x, ξ)) = 0, for j ≤ 4 and ξ ∈ N∗
xY .(69)
We say that this is the linearized conservation law for the principalsymbol of R.
Let us consider source fields that have the form Q′ε = ((Qε)ℓ)
K−1ℓ=1 =
εq′, (Qε)K = εz and Pε = εp. We denote q = (q′, z). We assume that
q′, z, and p are supported in V ⊂⊂ U .Let uε = (gε, φε) be the solution of (56) with source Pε and Qε.
Then uε depends C4-smoothly on ε and (gε, φε)|ε=0 = (g, φ). Denote
∂ε(gε, φε)|ε=0 = (g, φ). When ε0 is small enough, Pε and Qε are sup-ported in Ugε for all ε ∈ (0, ε0).
Let
Rε = gpkε ∇gεp ((Pε)jk + gεjk(Qε)K)
and
(Sε)ℓ = Sℓ(gε, φε,∇φε, Q′ε, (Qε)K , Rε),
where Sℓ are the adaptive source functions constructed in Theorem 4.1and its proof.
Then Sε|ε=0 = 0 and ∂εSε|ε=0 = S satisfy
(70)
Sℓ = DQ′,QK ,RSℓ(g, φ,∇φ, Q′, QK , R)
∣∣∣Q′=0,QK=0,R=0
q′
z
r
,

28 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
where r = gpk∇p(pjk + gjkz).
The functions u = (g, φ) satisfy the linearized Einstein-scalar fieldequation (33). The linearized Einstein-scalar field equation (33) is
epq(g)− t(1)pq (g)− t(2)pq (φ) = f1pq
�gφℓ − gnmgkj(∂n∂jφℓ + Γp
nj∂pφℓ)gmk −m2φℓ = f2ℓ ,
where
f1pq = ppq − (
L∑
ℓ=1
Sℓφℓ)gpq, where − (
L∑
ℓ=1
Sℓφℓ) = z,(71)
f2ℓ = Sℓ.
By Theorem 4.1 (ii), uε = (gε, φε) satisfy the conservation law (57).
This implies that u = (g, φ) satisfies the linearized Einstein-scalar fieldequation (33) and linearized of the conservation law (10) is valid, too.The linearized of the conservation law (10) gives, by considerationsbefore (71),
(L∑
ℓ=1
f2ℓ ∂jφℓ
)+ gpk∇pf
1kj = 0.(72)
Below, we use the adaptive source functions Sℓ constructed in The-orem 4.1 and its proof.
We see that
f = F (x;p,q) = (F (1)(x;p,q), F (2)(x;p,q))(73)
has by formulas (70) and (71) and Condition S the form
F(1)jk (x;p,q) = pjk + z(x)gjk(x)(74)
and
F (2)(x;p,q) = M(2)q′ + L(2)z+N j
(2)glk∇l(pjk + zgjk),(75)
where
M(2) =M(2)(φ(x), ∇φ(x), g(x)),
L(2) = L(2)(φ(x), ∇φ(x), g(x)),
N j(2) = N j
(2)(φ(x), ∇φ(x), g(x))
are, in local coordinates, matrices whose elements are smooth functions
of φ(x), ∇φ(x), and g(x). By Thm. 4.1 (i), the union of the image
spaces of the matrices M(2)(x) and L(2)(x), and N j(2)(x), j = 1, 2, 3, 4,
span the space RL for all x ∈ Ug,σ.
Consider n ∈ Z, t0, s0 > 0, Y = Y (x0, ζ0; t0, s0), K = K(x0, ζ0; t0, s0)and (x, ξ) ∈ N∗Y (to recall the definitions of these notations, see for-mula (77) and definitions below it). Let Z = Z(x, ξ) be set of the
values of the principal symbol f(x, ξ) = (f1(x, ξ), f2(x, ξ)), at (x, ξ),

LINEARIZATION STABILITY RESULTS 29
of the source f = (f1(x), f2(x)) ∈ In(Y ) that satisfy the linearizedconservation law for principal symbols (13).
We use the following auxiliary result:
Lemma 5.1. Assume the the Condition A is satisfied and Q = 0 and
P = 0. Let k0 ≥ 8, s1 ≥ k0 + 5, and Y ⊂ Ug be a 2-dimensional space-like submanifold and y ∈ Y , ξ ∈ N∗
yY , and let W be a conic neigh-borhood of (y, ξ) in T ∗M . Also, let y ∈ Ug,σ with some permutation σ.Let us consider an open, relatively compact local coordinate neighbor-hood V ⊂ Ug,σ ∩ U+
g of y such that in the coordinates X : V → R4,
Xj(x) = xj, we have X(Y ∩ V ) ⊂ {x ∈ R4; xjb1j = 0, xjb2j = 0}.
Let n1 ∈ Z+ be sufficiently large and n ≤ −n1. Let us considerp,q′, z ∈ In+1(Y ), supported in V , that have classical symbols with
principal symbols v(a)(x, ξ), w(a)1 (x, ξ), w
(a)2 (x, ξ), correspondingly, at
(x, ξ) ∈ N∗Y . Moreover, assume that the principal symbols of p andz satisfy the linearized conservation law for the principal symbols, thatis, (69), at all N∗Y ∩ N∗K and assume that they vanish outside theconic neighborhood W of (y, ξ) in T ∗M . Let f = (f 1, f 2) ∈ In+1(Y ) begiven by (70) and (71).
Then the principal symbol f(y, ξ) = (f1(y, ξ), f2(y, ξ)) of the sourcef at (y, ξ) is the set Z = Z(y, ξ). Moreover, by varying p,q′, z so thatthe linearized conservation law (69) for principal symbols is satisfied,
the principal symbol f(y, ξ) at (y, ξ) achieves all values in the (L + 6)dimensional space Z.
Proof. Let us use local coordinates X : V → R4 where V ⊂ M0 is
a neighborhood of x. In these coordinates, let v(b)(x, ξ) and w(b)2 (x, ξ)
denote the sub-principal symbols of p and z, respectively, at (x, ξ) ∈
N∗Y . Moreover, let v(c)j (x, ξ) = ∂
∂xj v(a)(x, ξ) and d
(c)j (x, ξ) = ∂
∂xj d(a)2 (x, ξ),
j = 1, 2, 3, 4 be the x-derivatives of the principal symbols and let usdenote
v(c)(x, ξ) = (v(c)j (x, ξ))4j=1, d(c)(x, ξ) = (d
(c)j (x, ξ))4j=1.
Let f = (f1, f2) = F (x;p,q) be defined by (74) and (75). Whenthe principal symbols of p,q′, z ∈ In(Y ) are such that the linearizedconservation law (69) for principal symbols is satisfied, we see that
f ∈ In(Y ) has the principal symbol f(x, ξ) = (f1(x, ξ), f2(x, ξ)) at(x, ξ), given by
f1(x, ξ) = s1(x, ξ),
f2(x, ξ) = s2(x, ξ),

30 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
where we use the notations
s1(x, ξ) = (v(a) + gw(a)2 )(x, ξ),(76)
s2(x, ξ) =(M(2)(x)w
(a)1 + J(2)(v
(c) + gd(c)) +
+L(2)w(a)2 +N j
(2) glkξl(v
(b)1 + gw
(b)2 )jk
)(x, ξ).
Here, roughly speaking, the J(2) term appears when the ∇-derivativesin R hit to the symbols of the conormal distributions having the form(67). We emphasize that here the symbols s1(x, ξ) and s2(x, ξ) are welldefined objects (in fixed local coordinates) also when the linearizedconservation law (69) for principal symbols is not valid. When (69) isvalid, f ∈ In(Y ) and s1(x, ξ) and s1(x, ξ) coincide with the principalsymbols of f1 and f2.
Observe that the map (c(b)jk ) 7→ (glkξlc
(b)jk )
4j=1, defined as Symm(R4×4) →
R4, is surjective. Denote
m(a) = (v(a) + gw(a)2 )(x, ξ),
m(b) = (v(b) + gw(b)2 )(x, ξ),
m(c) = (v(c) + gd(c))(x, ξ).
As noted above, by (66), the union of the image spaces of the matricesM(2)(x) and L(2)(x), and N j
(2)(x), j = 1, 2, 3, 4, span the space RL for
all x ∈ U . Hence the map
A : (m(a), m(b), m(c), w1, w(a)2 )|(x,ξ) 7→ (s1(x, ξ), s2(x, ξ)),
given by (76), considered as a map A : Y = (Symm(R4×4))1+1+4 ×R
K × R → Symm(R4×4) × RL, is surjective. Let X be the set of ele-
ments (m(a)(x, ξ), m(b)(x, ξ), m(c)(x, ξ), w(a)1 (x, ξ), w
(a)2 (x, ξ)) ∈ Y where
m(a)(x, ξ) = (v(a)+gw(a)2 )(x, ξ) is such that the pair (v(a)(x, ξ), w
(a)2 (x, ξ))
satisfies the linearized conservation law for principal symbols, see (69).Then X has codimension 4 in Y , we see that the image A(X ) has inSymm(R4×4)× R
L co-dimension less or equal to 4.By (72)) and considerations above it, we have that f satisfies the
linearized conservation law (10). This implies that its principal symbol
A((m(a)(x, ξ), m(b)(x, ξ), m(c)(x, ξ), w(a)1 (x, ξ), w
(a)2 (x, ξ))) has to satisfy
the linearized conservation law for principal symbols (13) and henceA(X ) ⊂ Z. As Z has codimension 4, this and the above prove thatA(X ) = Z. �
Now we are ready to prove the microlocal stability result for theEinstein-scalar field equation (7). Note that the claim of the followingtheorem does not involve the adaptive source functions constructed inTheorem 4.1 as these functions are needed only as an auxiliary tool inthe proof.
Next we prove Theorem 1.2.

LINEARIZATION STABILITY RESULTS 31
Proof. Let σ ∈ Σ(K) be such that y ∈ Ug,σ. Let p and q be the func-tions constructed in Lemma 5.1. We can assume that these functionsare supported in W0 = V0 ∩ V ∩ Ug,σ. Let Pε = εp and Qε = εq besources depending on ε ∈ R and uε = (gε, φε) be the solution of (56)with the sources Pε and Qε. Also, let
F1ε = Pε + Zεgε, Zε = −(
L∑
ℓ=1
Sεℓφ
εℓ +
1
2m2(Sε
ℓ )2),
(F2ε )ℓ = Sε
ℓ ,
where
Sεℓ = Sℓ(gε, φε,∇φε, Qε,∇Qε, Pε,∇
gεPε),
where Sℓ are the adaptive source functions constructed in Theorem 4.1and its proof.
By (58) also Sεℓ and the family Fε, ε ∈ [0, ε0] of non-linear sources
are supported in V0 and we have shown that uε = (gε, φε) and Fε satisfythe reduced Einstein-scalar field equation (7) and the conservation law(57). This proves Theorem 1.2. �
6. Application: Gravitational wave packets
Next we consider a distorted plane wave whose singular support isconcentrated near a geodesic. These waves, sketched in Fig. 1(Right),propagate near the geodesic γx0,ζ0([t0,∞)) and are singular on a surfaceK(x0, ζ0; t0, s0), defined below in (77), that is a subset of the lightcone +
g (x′), x′ = γx0,ξ0(t0). The parameter s0 gives a “width” of the
wave packet and when s0 → 0, its singular support tends to the setγx0,ζ0([2t0,∞)). Next we will define these wave packets.
y0 ΣΣ1
y′
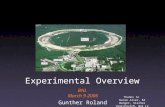
FIGURE 2. This is a schematic figure in the space R3. It describes
the location of a distorted plane wave (or a piece of a spherical wave)u at different time moments. This wave propagates near the geodesicγx0,ζ0((0,∞)) ⊂ R
1+3, x0 = (y0, t0) and is singular on a subset of alight cone emanated from x′ = (y′, t′). The piece of the distorted planewave is sent from the surface Σ ⊂ R
3, it starts to propagate, and at alater time its singular support is the surface Σ1.

32 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
We define the 3-submanifold K(x0, ζ0; t0, s0) ⊂ M0 associated to(x0, ζ0) ∈ L+(M0, g), x0 ∈ Ug and parameters t0, s0 ∈ R+ as
K(x0, ζ0; t0, s0) = {γx′,η(t) ∈M0; η ∈ W, t ∈ (0,∞)},(77)
where (x′, ζ ′) = (γx0,ζ0(t0), γx0,ζ0(t0)) and W ⊂ L+x′(M0, g) is a neighbor-
hood of ζ ′ consisting of vectors η ∈ L+x′(M0) satisfying ‖η − ζ ′‖g+ < s0.
Note that K(x0, ζ0; t0, s0) ⊂ +g (x
′) is a subset of the light cone start-
ing with x′ = γx0,ξ0(t0) and that it is singular at the point x′. LetS = {x ∈ M0; t(x) = t(γx0,ζ0(2t0))} be a Cauchy surface which in-tersects γx0,ζ0(R) transversally at the point γx0,ζ0(2t0). When t0 > 0is small enough, Y (x0, ζ0; t0, s0) = S ∩ K(x0, ζ0; t0, s0) is a smooth 2-dimensional space-like surface that is a subset of Ug.
Let Λ(x0, ζ0; t0, s0) be the Lagranginan manifold that is the flowoutfrom N∗Y (x0, ζ0; t0, s0) ∩N
∗K(x0, ζ0; t0, s0) on Char(�g) in the futuredirection. When Kreg ⊂ K = K(x0, ζ0; t0, s0) is the set of points xthat have a neighborhood W such that K ∩W a smooth 3-dimensionalsubmanifold, we have N∗Kreg ⊂ Λ(x0, ζ0; t0, s0). Below, we representlocally the elements w ∈ Bx in the fiber of the bundle B as a (10 +L)-dimensional vector, w = (wm)
10+Lm=1 .
Lemma 6.1. Let n1 be a sufficiently large integer, n ≤ −n1, t0, s0 > 0,Y = Y (x0, ζ0; t0, s0), K = K(x0, ζ0; t0, s0), Λ1 = Λ(x0, ζ0; t0, s0), and(x, ξ) ∈ N∗Y ∩ Λ1. Assume that f = (f1, f2) ∈ In(Y ), is a BL-valuedconormal distribution that is supported in a neighborhood V ⊂ M0
of γx0,ζ0 ∩ Y = {γx0,ζ0(2t0)} and has a R10+L-valued classical sym-
bol. Denote the principal symbol of f by f(x, ξ) = (fk(x, ξ))10+Lk=1 , and
assume that the symbol of f vanishes near the light-like directions inN∗Y \N∗K.
Let (g, φ) be a solution of the linear wave equation (43) with thesource f . Then u(1), considered as a vector valued Lagrangian distri-bution on the set M0 \ Y , satisfies u(1) ∈ In−3/2(M0 \ Y ; Λ1), and itsprincipal symbol a(y, η) = (aj(y, η))
10+Lj=1 at (y, η) ∈ Λ1 is given by
aj(y, η) =
10+L∑
k=1
Rkj (y, η, x, ξ)fk(x, ξ),(78)
where the pairs (x, ξ) and (y, η) are on the same bicharacteristics of�g, and x < y, that is, ((x, ξ), (y, η)) ∈ Λ′
g, and in addition, (x, ξ) ∈
N∗Y ∩N∗K. Moreover, the matrix (Rkj (y, η, x, ξ))
10+Lj,k=1 is invertible.
We call the solution u(1) a distorted plane wave that is associated tothe submanifold K(x0, ζ0; t0, s0).
Proof. As noted above (42), the parametrix of the scalar wave equa-tion satisfies (�g +V (x,D))−1 ∈ I−3/2,−1/2(∆′
T ∗M0,Λg), where V (x,D)
is a 1st order differential operator, ∆T ∗M0is the conormal bundle of

LINEARIZATION STABILITY RESULTS 33
the diagonal of M0 ×M0 and Λg is the flow-out of the canonical re-lation of �g. A geometric representation for its kernel is given in[64]. An analogous result holds for the matrix valued wave operator,�gI + V (x,D), when V (x,D) is a 1st order differential operator, thatis, (�gI + V (x,D))−1 ∈ I−3/2,−1/2(∆′
T ∗M0,Λg), see [78] and [24]. By
[38, Prop. 2.1], this yields u(1) ∈ In−3/2(Λ1) and the formula (78) whereR = (Rk
j (y, η, x, ξ))10+Lj,k=1 is obtained by solving a system of ordinary dif-
ferential equation along a bicharacteristic curve. Making similar con-siderations for the adjoint of the (�gI + V (x,D))−1, i.e., consideringthe propagation of singularities using reversed causality, we see thatthe matrix R is invertible. �
Let BLy be the fiber of the bundle BL at y and Sy,η be the space of
the elements in BLy satisfying the harmonicity condition for the symbols
(53) at (y, η). Let (x, ξ) ∈ N∗Y and Cx,ξ the set of elements in BLx that
satisfy the linearized conservation law for symbols, i.e., equation (45).Let n ≤ n0, t0, s0 > 0, Y = Y (x0, ζ0; t0, s0), K = K(x0, ζ0; t0, s0),
Λ1 = Λ(x0, ζ0; t0, s0), and v ∈ Cx,ξ. By Condition µ-SL, there is aconormal distribution f ∈ In(Y ) = In(N∗Y ) such that f satisfies the
linearized conservation law (10) and the principal symbol f(y, η) of f ,
defined on N∗Y , satisfies f(x, sη) = f(x, η)sn for s > 0. Moreover,by Condition µ-SL there is a family of sources Fε, ε ∈ [0, ε0) such
that ∂εFε|ε=0 = f and a solution uε + (g, φ) of the Einstein equationswith the source Fε that depend smoothly on ε and uε|ε=0 = 0. Thenu = ∂εuε|ε=0 ∈ In−3/2(M0 \ Y ; Λ1).
Let (x, ξ) ∈ N∗Y ∩ Λ1 (y, η) ∈ T ∗M0, y 6∈ Y be a light-like co-
vector such that (y, η) ∈ Θx,ξ. Since u = (g, φ) satisfies the lin-earized harmonicity condition (46), the principal symbol a(y, η) =(a1(y, η), a2(y, η)) of u satisfies a(y, η) ∈ Sy,η, This shows that the
map R = R(y, η, x, ξ), given by R : f(x, ξ) 7→ a(y, η) that is defined inLemma 6.1, satisfies R : Cx,ξ → Sy,η. Since R is one-to-one and thelinear spaces Cx,ξ and Sy,η have the same dimension, we see that
R : Cx,ξ → Sy,η(79)
is a bijection. Hence, when f ∈ In(Y ) varies so that the linearizedconservation law (45) for the principal symbols is satisfied, the principalsymbol a(y, η) at (y, η) of the solution u of the linearized Einsteinequation achieves all values in the (L+ 6) dimensional space Sy,η.
Appendix: Motivation of adaptive source functions using
Lagrangian formulation
To motivate the system (56) of partial differential equations, we givein this appendix a non-rigorous discussion.
Following [12, Ch. III, Sect. 6.4, 7.1, 7.2, 7.3] and [3, p. 36] westart by considering the Lagrangians, associated to gravity, scalar fields

34 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
φ = (φℓ)Lℓ=1 and non-interacting fluid fields, that is, the number density
four-currents n = (nκ(x))Jκ=1 (where each nκ is a vector field, see [3,
p. 33]). We consider also products of vector fields nκ(x) and 12-density
|det(g)|1/2 that denote pκ,
pjκ(x)
∂
∂xj= nj
κ(x)|det(g)|1/2∂
∂xj.(80)
see [25, p. 53]. Also, ρ = (−gjknjκn
kκ)
1/2 corresponds to the energydensity of the fluid. Below, we use the variation of density with respectto the metric,
δ
δgjk(
J∑
κ=1
(−gnmpnκp
mκ )
1/2) = −J∑
κ=1
1
2(−gnmp
nκp
mκ )
−1/2pjκp
kκ(81)
= −J∑
κ=1
1
2ρnj
κnkκ |det(g)|1/2.
Due to this, we denote
(82)
P =J∑
κ=1
1
2ρnκ
jnκkdx
j ⊗ dxk, where nκk = gkin
iκ = gkip
iκ|det(g)|−1/2.
Below, we consider a model for g, φ, and p. We also add in to themodel a Lagrangian associated with some scalar valued source fieldsS = (Sℓ)
Lℓ=1 and Q = (Qk)
Kk=1. We consider action corresponding to
the coupled Lagrangians
A =
∫
M
(Lgrav(x) + Lfields(x) + Lsource(x)
)dVg(x),
Lgrav =1
2R(g),
Lfields =
L∑
ℓ=1
(−
1
2gjk∂jφℓ ∂kφℓ − V(φℓ;Sℓ)
)+
+J∑
κ=1
(−
1
2(−gjkp
jκp
kκ)
1
2
)|det(g)|−
1
2 ,
Lsource = εHε(g, S,Q,p, φ),
where R(g) is the scalar curvature, dVg = (−det(g))1/2dx is the volumeform on (M, g),
V(φℓ;Sℓ) =1
2m2(φℓ +
1
m2Sℓ
)2(83)
are energy potentials of the scalar fields φℓ that depend on Sℓ, andHε(g, S,Q,p, φ) is a function modeling the measurement device weuse. We assume that Hε is bounded and its derivatives with respect to

LINEARIZATION STABILITY RESULTS 35
S,Q,p are very large (like of order O((ε)−2)) and its derivatives withrespect of g and φ are bounded when ε > 0 is small. We note thatthe above Lagrangian for the fluid fields is the sum of the single fluidLagrangians. where for all fluids the master function Λ(s) = s1/2, thatis, the energy density of each fluid is given by ρ = Λ(−gjkn
jnk).Forfluid Lagrangians, see the discussions in [3, p. 33-37], [12, Ch. III,Sect. 8], [25, p. 53], and [98] and [30, p. 196].
When we compute the critical points of the Lagrangian L and neglectthe O(ε)-terms, the equation δA
δg= 0, together with formulas (81) and
(82), give the Einstein equations with a stress-energy tensor Tjk definedin (55). The equation δA
δφ= 0 gives the wave equations with sources Sℓ.
We assume that O(ε−1) order equations obtained from the equation( δAδS, δAδQ, δAδp) = 0 fix the values of the scalar functions Q and the fields
pκ, κ = 1, 2, . . . , J , and moreover, yield for the sources S = (Sℓ)Lℓ=1
equations of the form
Sℓ = Sℓ(g, φ,∇φ,Q,∇Q,P,∇gP )(84)
where P is given by (82). Let us aslo write (84) using different nota-tions, as
Sℓ = Qℓ + S2ndℓ (g, φ,∇φ,Q,∇Q,P,∇gP ).
Summarizing, we have obtained, up to the above used approximations,the model (56). However, note that above the field P is not directlycontrolled but instead, we control p and the value of the field P isdetermined by the solution n and formula (82). In this sense P is notcontrolled, but an observed field.
Above, the function Hε models the way the measurement deviceworks. Due to this we will assume that Hε and thus functions Sℓ
may be quite complicated. The interpretation of the above is that ineach measurement event we use a device that fixes the values of thescalar functions Q, p, and gives the equations for S2nd that tell howthe sources of the φ-fields adapt to these changes so that the physicalconservation laws are satisfied.
Acknowledgements. The authors express their gratitude to MSRI,the Newton Institute, the Fields Institute and the Mittag-Leffler Insti-tute, where parts of this work have been done.
YK was partly supported by EPSRC and the AXA professorship atthe Mittag-Leffler Institute. ML was partly supported by the FinnishCentre of Excellence in Inverse Problems Research 2012-2017. GU waspartly supported by NSF, a Clay Senior Award at MSRI, a Chancel-lor Professorship at UC Berkeley, a Rothschild Distinguished VisitingFellowship at the Newton Institute, the Fondation de Sciences Mathé-matiques de Paris, and a Simons Fellowship.

36 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
References
[1] P. Alinhac: Non-Unicite du Probleme de Cauchy, Annals of Mathematics, 117(1983), 77–108.
[2] M. Anderson, A. Katsuda, Y. Kurylev, M. Lassas, M. Taylor: Boundary reg-ularity for the Ricci equation, Geometric Convergence, and Gel’fand’s InverseBoundary Problem, Inventiones Mathematicae 158 (2004), 261-321.
[3] N. Andersson, G. Comer: Relativistic Fluid Dynamics: Physics for Many Dif-ferent Scales, Living Rev. Relativity 10 (2007), 1
[4] V. Babich, V. Ulin: The complex space-time ray method and “quasiphotons.”(Russian) Zap. Nauchn. Sem. LOMI 117 (1981), 5–12.
[5] C. Bär, N. Ginoux, F. Pfäffle: Wave equations on Lorentzian manifolds and
quantization, ESI Lectures in Mathematics and Physics, 2007, 202 pp.[6] J. Beem, P. Ehrlich, K. Easley: Global Lorentzian geometry, Pure and. Applied
Mathematics, vol. 67, Dekker, 1981, p. 270[7] M. Belishev: An approach to multidimensional inverse problems for the wave
equation. (Russian) Dokl. Akad. Nauk SSSR 297 (1987), 524–527.[8] M. Belishev, Y. Kurylev: To the reconstruction of a Riemannian manifold via
its spectral data (BC-method). Comm. PDE 17 (1992), 767–804.[9] Y. Berezanskii: The uniqueness theorem in the inverse problem of spectral
analysis for the Schrödinger equation. Trudy Moskov Mat. Obs. 7 (1958),1-62.[10] A. Bernal, M. Sanchez: Globally hyperbolic spacetimes can be defined as
"causal" instead of "strongly causal", Class. Quant. Grav. 24 (2007) 745-750.[11] A. Bernal, M. Sanchez: Smoothness of time functions and the metric splitting
of globally hyperbolic spacetimes. Comm. Math. Phys. 257 (2005), 43–50.[12] Y. Choquet-Bruhat, General relativity and the Einstein equations. Oxford
Univ. Press, 2009. xxvi+785 pp.[13] Y. Choquet-Bruhat, J. Isenberg, D. Pollack: Applications of theorems of Jean
Leray to the Einstein-scalar field equations. J. Fixed Point Theory Appl. 1(2007), 31-46.
[14] Y. Choquet-Bruhat, J. Isenberg, D. Pollack: The Einstein-scalar field con-straints on asymptotically Euclidean manifolds, Chi. Ann. of Math B, 27(2006)31–52.
[15] Y. Choquet-Bruhat, J. Isenberg, D. Pollack: The constraint equations forthe Einstein-scalar field system on compact manifolds, Classical and Quan-
tum Gravity 24 (2007), 809.[16] M. Choulli, P. Stefanov: Inverse scattering and inverse boundary value prob-
lems for the linear Boltzmann equation. Comm. PDE 21 (1996), 763-785.[17] D. Christodoulou: Global existence of generalized solutions of the spheri-
cally symmetric Einstein-scalar equations in the large. Comm. Math. Phys.
106 (1986), 587-621.[18] D. Christodoulou, S. Klainerman: The global nonlinear stability of the
Minkowski space, Princeton University Press, Princeton, U.S.A., 1993.[19] P. Chrusciel, J. Isenberg D. Pollack: A brief review of initial data engineering
Comm. Math. Phys. 257 (2005), 29-42.[20] P. Chrusciel, R, Mazzeo: On “many black hole” vacuum spacetimes. Classical
and Quantum Gravity 20 (2003), 1-26.[21] T. Collins, A. Greenleaf, M. Pramanik: A multi-dimensional resolution of
singularities with applications. Amer. J. Math. 135 (2013), 1179-1252.[22] M. Dafermos: The evolution problem in general relativity. Current develop-
ments in mathematics, 2008, 1–66, Int. Press, Somerville, MA, 2009.[23] J.-M. Delort: F.B.I. transformation. Second microlocalization and semilinear
caustics. Lecture Notes in Mathematics, 1522. Springer, 1992. vi+101 pp.

LINEARIZATION STABILITY RESULTS 37
[24] N. Dencker: On the propagation of polarization sets for systems of real prin-cipal type, Journal of Functional Analysis 46 (1982), 351-372
[25] P.A.M. Dirac, General Theory of Relativity (1975), 79 pp.[26] D. Dos Santos Ferreira, C. Kenig, M. Salo: Determining an unbounded poten-
tial from Cauchy data in admissible geometries Comm. PDE, 38(2013), 50-68.[27] J. Duistermaat: Fourier Integral Operators, Birkhäuser, 1996. x+142 pp.[28] G. Eskin: Inverse hyperbolic problems and optical black holes. Comm. Math.
Phys. 297 (2010), 817–839.[29] R. Felea, A. Greenleaf: Fourier integral operators with open umbrellas and
seismic inversion for cusp caustics, Math. Res. Lett. 17 (2010), 867-886.[30] F. de Felice, C. Clarke: Relativity on Curved Manifolds, Cambridge Mono-
graphs on Mathematical Physics.[31] M. Fridman, et al: Demonstration of temporal cloaking Nature 481(2012), 62.[32] A. Fischer, J. Marsden: The Einstein evolution equations as a first-order quasi-
linear symmetric hyperbolic system. I. Comm. Math. Phys. 28 (1972), 1–38[33] A. Fischer and J. Marsden: Linearization stability of the Einstein equations.
Bull. Amer. Math. Soc. Volume 79 (1973), 997-1003.[34] R. Geroch: Domain of dependence. J. Mathematical Phys. 11 (1970), 437–449.[35] C. Graham, M. Zworski: Scattering matrix in conformal geometry. Invent.
Math., 152, 89-118, 2003.[36] C. Guillarmou, A. Sa Barreto: Inverse Problems for Einstein manifolds. Inverse
Prob. Imag. 3 (2009), 1-15.[37] C. Guillarmou, M. Salo, L. Tzou: Inverse scattering at fixed energy for surfaces
with Euclidean ends. Comm. Math. Phys. 303 (2011), 761-784.[38] A. Greenleaf, G., Uhlmann: Recovering singularities of a potential from sin-
gularities of scattering data. Comm. Math. Phys. 157 (1993), 549–572.[39] A. Greenleaf, G. Uhlmann: Estimates for singular Radon transforms and pseu-
dodifferential operators with singular symbols. J. Funct. Anal. 89 (1990), no.1, 202–232.
[40] A. Greenleaf, Y. Kurylev, M. Lassas, G. Uhlmann: Full-wave invisibility ofactive devices at all frequencies. Comm. Math. Phys. 275 (2007), 749-789.
[41] A. Grigis, J. Sjöstrand: Microlocal analysis for differential operators: an in-
troduction, LMS, 1999.[42] V. Guillemin, G. Uhlmann: Oscillatory integrals with singular symbols. Duke
Math. J. 48 (1981), 251–267.[43] T. Helin, M. Lassas, L. Oksanen: An inverse problem for the wave equation
with one measurement and the pseudorandom source. Analysis and PDE 5
(2012), 887-912.[44] P. Hoskins: Principles of ultrasound elastography, Ultrasound (20) 2012, 8-15.[45] T. Hughes, T. Kato; J. Marsden: Well-posed quasi-linear second-order hy-
perbolic systems with applications to nonlinear elastodynamics and generalrelativity. Arch. Rational Mech. Anal. 63 (1976), 273–294
[46] S. Hawking, G. Ellis: The Large Scale Structure of Space-Time, CambridgeUniv. press, 1973.
[47] L. Hörmander: The analysis of linear partial differential operators I. Springer-Verlag, 1985, viii+525 pp.
[48] L. Hörmander: The analysis of linear partial differential operators III.
Springer-Verlag, 1985, viii+525 pp.[49] L. Hörmander: The analysis of linear partial differential operators IV.
Springer-Verlag, 1985, vii+352 pp.[50] V. Isakov: On uniqueness in inverse problems for semilinear parabolic equa-
tions. Arch. Rational Mech. Anal. 124 (1993), 1-12.

38 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
[51] V. Isakov and A. Nachman: Global uniqueness in a two-dimensional semilinearelliptic inverse problem, Trans. Amer. Math. Soc. 347 (1995), 3375–3390.
[52] M. Joshi, A. Sa Barreto: Inverse scattering on asymptotically hyperbolic man-ifolds. Acta Mathematica 184 (2000), 41-86.
[53] H. Kang, G. Nakamura: Identification of nonlinearity in a conductivity equa-tion via the Dirichlet-to-Neumann map. Inverse Prob. 18 (2002), 1079-1088.
[54] A. Katchalov, A system of coordinate for describing the "quasiphoton". (Rus-sian) Zap. Nauch. Semin. LOMI, 140 (1984), 73–76.
[55] A. Katchalov, Y., Kurylev, Multidimensional inverse problem with incompleteboundary spectral data. Comm. Part. Diff. Equations 23 (1998), 55–95.
[56] A. Katchalov, Y. Kurylev, M. Lassas: Inverse boundary spectral problems.Chapman-Hall/CRC, Boca Raton, FL, 2001. xx+290 pp
[57] T. Kato: Linear evolution equations of “hyperbolic” type, II, J. Math. Soc.
Japan 4 (1973), 648-666.[58] T. Kato: Quasi-linear equations of evolution, with applications to partial differ-
ential equations. Spectral theory and differential equations, pp. 25–70. LectureNotes in Math., Vol. 448, Springer, 1975.
[59] K. Krupchyk, Y. Kurylev, M. Lassas: Inverse spectral problems on a closedmanifold. J. Math. Pures et Appl. 90 (2008), 42-59.
[60] Y. Kurylev, M. Lassas, G. Uhlmann: Rigidity of broken geodesic flow andinverse problems. Amer. J. Math. 132 (2010), 529–562.
[61] Y. Kurylev, M. Lassas, G. Uhlmann: Inverse problems in spacetime I: Inverseproblems for Einstein equations – Extended preprint version. Preprint.
[62] Y. Kurylev, M. Lassas, G. Uhlmann: Inverse problems in spacetime II: Recon-struction of a Lorentzian manifold from light observation sets, Preprint.
[63] S. Klainerman, I. Rodnianski: Improved local well-posedness for quasi-linearwave equations in dimension three, Duke Math. J., 117 (2003), no 1 , 1-124.
[64] S. Klainerman, I. Rodnianski: A Kirchoff-Sobolev parametrix for wave equa-tions in a curved space-time. J. Hyperb. Diff. Eq. 4, (2007), 401-433.
[65] S. Klainerman, I. Rodnianski: Rough solutions to the Einstein vacuum equa-tions, Annals of Mathematics, 161 (2005), 1143-1193.
[66] T. Kundic, et al.: A Robust Determination of the Time Delay in 0957+561A,B and a Measurement of the Global Value of Hubble’s Constant, Astrophysical
Journal 482 (1997), 75-82.[67] L. Landau and E. Lifshitz: The Classical Theory of Fields, Pergamon Press,
1971.[68] J. Lee, G. Uhlmann: Determining anisotropic real-analytic conductivities by
boundary measurements. Comm. Pure Appl. Math., 42 (1989), 1097–1112.[69] H. Lindblad, I. Rodnianski: Global existence for the Einstein vacuum equations
in wave coordinates. Comm. Math. Phys. 256 (2005), 43-110.[70] H. Lindblad: Global solutions of quasilinear wave equations. Amer. J. Math.
130 (2008), 115-157.[71] J. Luk, I. Rodnianski: Nonlinear interaction of impulsive gravitational waves
for the vacuum Einstein equations, Preprint arXiv:1301.1072.[72] M. Maggiore: Gravitational Waves: Volume 1: Theory and Experiments, Ox-
ford U. Press, 2007, 576 pp.[73] M. McCall et al: A spacetime cloak, or a history editor, Journal of Optics 13
(2011), 024003.[74] J. McLaughlin, D. Renzi: Shear Wave Speed Recovery in Transient Elastogra-
phy And Supersonic Imaging Using Propagating Fronts, Inverse Problems 22(2006), 681-706.

LINEARIZATION STABILITY RESULTS 39
[75] J. McLaughlin, D. Renzi, K. Parker, C. Wu: Shear Wavespeed Recovery UsingMoving Interference Patterns Obtained in Sonoelastography Experiments, J.Acoustic Soc. Am. 121 (2007), 2438-2446.
[76] A. Melin, J. Sjöstrand: Fourier integral operators with complex-valued phasefunctions, in Fourier Integral Operators and Partial Differential Equations,Lecture Notes in Math. 459, Springer, 1975.
[77] R. Melrose, A. Sa Barreto, A. Vasy: Asymptotics of solutions of the waveequation on de Sitter-Schwarzschild space. To appear in Comm. PDE.
[78] R. Melrose, G. Uhlmann: Lagrangian intersection and the Cauchy problem.Comm. Pure Appl. Math. 32 (1979), 483–519.
[79] R. Melrose, N. Ritter: Interaction of nonlinear progressing waves for semilinearwave equations. Ann. of Math. 121 (1985), 187–213.
[80] R. Melrose, N. Ritter: Interaction of progressing waves for semilinear waveequations. II. Ark. Mat. 25 (1987), 91–114.
[81] G. Nakamura, M. Watanabe: An inverse boundary value problem for a non-linear wave equation. Inverse Probl. Imaging 2 (2008), 121–131.
[82] K. Nomizu, H. Ozeki: The existence of complete Riemannian metrics. Proc.
Amer. Math. Soc. 12 (1961), 889–891.[83] B. O’Neill, Semi-Riemannian geometry. With applications to relativity. Pure
and Applied Mathematics, 103. Academic Press, Inc., 1983. xiii+468 pp.[84] J. Ophir et al.: Elastography: ultrasonic estimation and imaging of the elastic
properties of tissues. Proc. Inst. Mech. Eng. H. 213 (1999), 203-33.[85] T. Padmanabhan: Gravitation: Foundations and Frontiers, Cambridge Uni-
versity press, 700 pp, 2010.[86] J. Ralston: Gaussian beams and the propagation of singularities. Studies in
partial differential equations, 206–248, MAA Stud. Math., 23, 1982[87] J. Rauch, M. Reed: Singularities produced by the nonlinear interaction of three
progressing waves; examples. Comm. PDE 7 (1982), 1117–1133.[88] A. Rendall: Partial differential equations in general relativity. Oxford Univer-
sity Press, 2008. xvi+279 pp.[89] A. Rendall: Local and global existence theorems for the Einstein equations.
Living Rev. Relativ. 3 (2000), 2000-1, 36 pp.[90] H. Ringström: The Cauchy Problem in General Relativity, EMS, 2009, 307 pp.[91] R. Sachs, H. Wu: General relativity for mathematicians, Springer 1977, 291 p.[92] M. Salo, X. Zhong: An inverse problem for the p-Laplacian: boundary deter-
mination. SIAM J. Math. Anal. 44 (2012), 2474-2495.[93] Z. Sun: On a quasilinear inverse boundary value problem. Math. Z. 221 (1996),
293-305.[94] Z. Sun, G. Uhlmann: Inverse problems in quasilinear anisotropic media. Amer.
J. Math. 119 (1997), 771-797.[95] D. Tataru: Unique continuation for solutions to PDE’s; between Hörmander’s
theorem and Holmgren’s theorem. Comm. PDE 20 (1995), 855–884.[96] D. Tataru: Unique continuation for operators with partially analytic coeffi-
cients. J. Math. Pures Appl. 78 (1999), 505–521.[97] M. Taylor: Partial differential equations. III. Springer 1997, 608 p.[98] A. Taub: Relativistic Fluid Mechanics Annual Review of Fluid Mechanics 10
(1978), 301-332.[99] A. Vasy: Diffraction by edges. Modern Phys. Lett. B 22 (2008), 2287–2328.[100] A. Vasy: Propagation of singularities for the wave equation on manifolds with
corners. Ann. of Math. (2) 168 (2008), 749–812.

40 YAROSLAV KURYLEV, MATTI LASSAS, GUNTHER UHLMANN
Yaroslav Kurylev, UCL; Matti Lassas, University of Helsinki; Gun-
ther Uhlmann, University of Washington, and University of Helsinki.