
x x xx yy xy y y xx yy xy () - Iowa State Universitye_m.274h/area moments.pdf · x x xx yy xy y y...
15
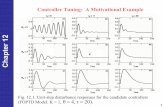
θ x y x' y' The transformation equations for area moments due to a rotation of axes are: ( ) 2 2 ' 2 2 ' ' 2 2 ' ' cos sin 2 sin cos sin cos 2 sin cos sin cos sin cos cos sin xx xx yy xy yy xx yy xy xy xx yy xy I I I I I I I I I I I I θ θ θ θ θ θ θ θ θ θ θ θ θ θ ′ = + − = + + = − + − n t We can write these relations in terms of the components of the unit vectors n, t acting along the x' and y' axes, respectively, where Area Moment Matrices cos sin sin cos x y x y θ θ θ θ = + =− + n e e t e e where e x , e y are unit vectors along the x and y- axes. e x e y 1 n x n y θ 1 t x t y θ t n
Transcript of x x xx yy xy y y xx yy xy () - Iowa State Universitye_m.274h/area moments.pdf · x x xx yy xy y y...

θx
y
x'
y'
The transformation equations for area moments due to a rotation of axes are:
( )
2 2'
2 2' '
2 2' '
cos sin 2 sin cos
sin cos 2 sin cos
sin cos sin cos cos sin
x x xx yy xy
y y xx yy xy
x y xx yy xy
I I I I
I I I I
I I I I
θ θ θ θ
θ θ θ θ
θ θ θ θ θ θ
′ = + −
= + +
= − + −
nt
We can write these relations in terms of the components of the unit vectors n, t acting along the x' and y' axes, respectively, where
Area Moment Matrices
cos sin
sin cosx y
x y
θ θ
θ θ
= +
= − +
n e e
t e e
where ex , ey are unit vectors along the x and y- axes.
ex
ey1
nx
nyθ
1
tx
ty θ
tn

We find
( )
2 2' '
2 2' '
' '
2
2x x xx x yy y xy x y
y y xx x yy y xy x y
x y xx x x yy y y xy x y y x
I I n I n I n n
I I t I t I t t
I I n t I n t I n t n t
= + −
= + −
= − − + +
These relations can be written in matrix notation as
' ' ' '
' ' ' '
x x x y x y xx xy x x
x y y y x y xy yy y y
I I n n I I n tI I t t I I n t
− −⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
or[ ] [ ] [ ][ ]' T=I Q I Q
where[ ] ( ) ( )
( ) ( )cos , ' cos , 'cos , ' cos , '
x x
y y
n t x x x yn t y x y y
⎡ ⎤⎡ ⎤= = ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
Q
is called the direction cosine matrix
cosine of the angle between the x and y' axes,etc.

>> M = [ 288 72;72 72] M =
288 7272 72
>> angle =30*pi/180;
>> Q = [ cos(angle) -sin(angle); sin(angle) cos(angle)]
Q =
0.8660 -0.50000.5000 0.8660
>> Mr =Q'*M*Q
Mr =
296.3538 -57.5307-57.5307 63.6462
Example (in MATLAB)
Ixx = 288 in4
Iyy = 72 in4
Ixy = -72 in4 30o
x
y
x'
y'
Ix'x' = 296 in4
Iy'y' = 64 in4
Ix'y' = 58 in4
[Q] .. direction cosine matrix
[Mr] = [Q]T [M] [Q]

It is very easy to determine the principal values and principal directions in this matrix form of the relations
Suppose we can find a set of coordinates where the unit vectors along the principal axes have components Nx, Ny and Tx ,Ty . Then
1
2
00
x y xx xy x x
x y xy yy y y
N N I I N TIT T I I N TI
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤= ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
where I1, I2 are the principal area moments and the mixed area moment is zero in the principal axis coordinatesIf we multiply both sides of the above equation by [Q] we find, since
[ ][ ] [ ] 1 00 1
T ⎧ ⎫= = ⎨ ⎬
⎩ ⎭Q Q I
1
2
00
x x xx xy x x
y y xy yy y y
N T I I N TIN T I I N TI
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
which gives

1 2
1 2
x x xx xy x x
y y xy yy y y
N I T I I I N TN I T I I I N T
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
This is equivalent to the two sets of equations:
1
1
2
2
x xx xy x
y xy yy y
x xx xy x
y xy yy y
N I I I NN I I I N
T I I I TT I I I T
−⎧ ⎫ ⎡ ⎤ ⎧ ⎫=⎨ ⎬ ⎨ ⎬⎢ ⎥−⎩ ⎭ ⎣ ⎦ ⎩ ⎭
−⎧ ⎫ ⎡ ⎤ ⎧ ⎫=⎨ ⎬ ⎨ ⎬⎢ ⎥−⎩ ⎭ ⎣ ⎦ ⎩ ⎭
Thus we see to find either the principal area moment I1 and its principal direction N or the principal area moment I2 and its principal direction T we need to solve the system of equations
xx xy x x
xy yy y y
I I U U II I U U I
−⎡ ⎤ ⎧ ⎫ ⎧ ⎫=⎨ ⎬ ⎨ ⎬⎢ ⎥−⎣ ⎦ ⎩ ⎭ ⎩ ⎭
where the unit vector U can be either N or T and I can be either I1 or I2

xx xy x x
xy yy y y
I I U U II I U U I
−⎡ ⎤ ⎧ ⎫ ⎧ ⎫=⎨ ⎬ ⎨ ⎬⎢ ⎥−⎣ ⎦ ⎩ ⎭ ⎩ ⎭
The system of equations
Since this eigenvalue problem can be rewritten as
1 00
xx xy x
xy yy y
I I I UI I I U− −⎡ ⎤ ⎧ ⎫ ⎧ ⎫
=⎨ ⎬ ⎨ ⎬⎢ ⎥− − ⎩ ⎭⎣ ⎦ ⎩ ⎭
which can also be written as
[ ]{ } { }I=I U U
is called an eigenvalue problem, whose solution is a scalar eigenvalue, I, and a corresponding eigenvector, U
to find a solution we must solve the system of equations

( )( )
0
0xx x xy y
xy x yy y
I I U I U
I U I I U
− − =
− + − =
But this is a homogeneous set of equations which only has the solution U = 0 unless the determinant of the matrix of coefficients is zero, i.e.
( )( ) 2 0xx yy xyI I I I I− − − =
Expanding this equation we obtain a quadratic equation for I:
( ) ( )2 2 0xx yy xx yy xyI I I I I I I− + + − =
which has the two roots
( ) 22
1 2,2 2
xx yy xx yyxy
I I I II I I
+ −⎛ ⎞= ± +⎜ ⎟
⎝ ⎠
which we see are just the principal area moments

( )( )
0
0xx x xy y
xy x yy y
I I U I U
I U I I U
− − =
− + − =
if we place one of the principal values back into the above system of equations then we can solve for the corresponding principal direction. However, since we have set the determinant of this system equal to zero, the two equations above are not independent. Thus, we can only solve one of them for a ratio of unit vector components. Thus, for example, from the first equation and using I = I1 we have
( )1
xyx
y xx
IUU I I
=−
But since U is a unit vector we have
2 2 1x yU U+ =
which we can solve for Uy in terms of the above ratio as
Note: this is equivalent to solving for θ via:( )1tan xx
xy
I II
θ−
=

( )2
1
/ 1y
x y
UU U
±=
+
And then we can find Ux since the ratio Ux/Uy is known. Note that we only get the vector solution to within a plus or minus sign since both U and –Uare principal directions. If we repeat the process for I2 then we can find the second principal direction.
However, in MATLAB we can get both principal values and directions out directly by just forming up the area moment matrix
xx xy
xy yy
I IM
I I−⎡ ⎤
= ⎢ ⎥−⎣ ⎦and then giving that matrix to the built-in function eig which solves the eigenvalue problem. the MATLAB call is:
[ pdirs, pvals] = eig(M)
The matrix pdirs will then have the principal direction components (in columns) as

( ) ( )( ) ( )
1 2
1 2
x x
y y
U Updirs
U U
⎡ ⎤= ⎢ ⎥⎢ ⎥⎣ ⎦
and the matrix pvals will have the corresponding principal values
1
2
00I
pvalsI
⎡ ⎤= ⎢ ⎥⎣ ⎦
Example:
>> M = [ 288 72;72 72];
>> [pdirs, pvals] = eig(M)
pdirs =
0.2898 -0.9571
-0.9571 -0.2898
pvals =
50.2002 0
0 309.7998
>> atan(pdirs(2,2)/pdirs(1,2))*180/pi
ans = 16.8450angle (degrees) for 309.8 value
28872
72
xx
yy
xy
II
I
=
=
= −
I1 =50.2U1 = 0.2898 ex - 0.9571ey
I2 =309.8U2 = -0.9571 ex - 0.28981ey

It can be shown that the eigenvalues I1 , I2 of the eigenvalue problem
[ ]{ } { }I=I U U
are always real and the eigenvectors U1 , U2 are real and orthogonal to each other since the matrix [ I ] is a real, symmetrical matrix.

One of the reasons for treating the transformation of area moments by a matrix approach is that it easily generalizes to more complex problems. For example, in dynamics the three dimensional angular motion of a body (such as a spinning satellite, for example) is controlled by the mass moments of inertiadefined as
( )( )( )( )( )( )
2 2
2 2
2 2
mxx
myy
mzz
mxy
mxz
myz
I y z dV
I x z dV
I x y dV
I xy dV
I xz dV
I yz dV
ρ
ρ
ρ
ρ
ρ
ρ
= +
= +
= +
=
=
=
∫∫∫∫∫∫
where ρ is the mass density and dV is a volume element

In this case the mass moments transform due to a rotation of axes in just the same manner as we have already discussed. If we let unit vectors n, t, v be along the x', y', z' axes (which are assumed to be orthogonal to each other), then
x
y
z
x'
y'
z'
nt
v
' ' ' ' ' '
' ' ' ' ' '
' ' ' ' ' '
x x x y x z x y z xx xy xz x x x
y x y y y z x y z yx yy yz y y y
z x z y z z x y z zx zy zz z z z
I I I n n n I I I n t vI I I t t t I I I n t vI I I v v v I I I n t v
⎡ ⎤ ⎡ ⎤ ⎡ ⎤− − − − ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − = − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − − − ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦

' ' ' ' ' '
' ' ' ' ' '
' ' ' ' ' '
x x x y x z x y z xx xy xz x x x
y x y y y z x y z yx yy yz y y y
z x z y z z x y z zx zy zz z z z
I I I n n n I I I n t vI I I t t t I I I n t vI I I v v v I I I n t v
⎡ ⎤ ⎡ ⎤ ⎡ ⎤− − − − ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − = − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − − − ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
We see that again we have
In this case there are three principal mass moments of inertia and three corresponding principal directions. These are again determined by the solution of the eigenvalue problem
[ ]{ } { }I=I U U
[ ] [ ] [ ][ ]' T=I Q I Q

Using MATLAB it is still easy to solve for the principal mass moments of inertia and the principal directions with the same eigenvalue function eig
>> I=[100 20 30; 20 300 50; 30 50 200]
I =
100 20 30
20 300 50
30 50 200
EDU>> [pdirs, pvals]=eig(I)
pdirs =
0.9670 -0.2166 0.1337
-0.0322 0.4169 0.9084
-0.2525 -0.8827 0.3962
pvals =
91.4995 0 0
0 183.7468 0
0 0 324.7537
mass moment of inertiamatrix
principal directions (in columns)(x, y, z components of a unit vector along the principal axis)
principal mass momentsof inertia








![élyi[1])toBracewell)[2,3] · Technical)Notes) Converting)Erdélyi[1])toBracewell)[2,3]! Erdélyidefinedhis!Hankel!transform!of!order!v!as![1]:! ( )( )1 2 0 gy f xJ xy xy dx(;) ()υ](https://static.fdocument.org/doc/165x107/5edc9e48ad6a402d66675c69/lyi1tobracewell23-technicalnotes-convertingerdlyi1tobracewell23.jpg)






![testable E XY YX arXiv:2011.05234v2 [cs.DS] 11 Nov 2020](https://static.fdocument.org/doc/165x107/61593db669352756572b3cda/testable-e-xy-yx-arxiv201105234v2-csds-11-nov-2020.jpg)