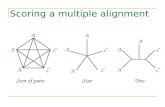
Scoring a multiple alignment Sum of pairsStarTree A A C CA A A A A A A CC CC.
Unified primal formulation-baseda priori and a posteriori error analysis
of mixed finite element methods
Martin Vohralík
Laboratoire Jacques-Louis LionsUniversité Pierre et Marie Curie (Paris 6)
Austin, April 30, 2008
Framework A priori est. A posteriori est. Remarks Exp. C.
IntroductionModel problem (S inhomogeneous and anisotropic)
u = −S∇p,∇ · u = f in Ω −∇ · (S∇p) = f in Ωp = 0 on ∂Ω p = 0 on ∂Ω
Mixed finite elements(S−1uh,vh)− (ph,∇ · vh) = 0 ∀vh ∈ Vh,
(∇ · uh, φh) = (f , φh) ∀φh ∈ ΦhTraditional analysis
weak mixed formulation(S−1u,v)− (p,∇ · v) = 0
∀v ∈ H(div,Ω),(∇ · u, φ) = (f , φ) ∀φ ∈ L2(Ω)
inf–sup condition∇ · Vh = Φh
Presented analysisclassical weak formulation
(S∇p,∇ϕ) = (f , ϕ)∀ϕ ∈ H10 (Ω)
postprocessing and discreteFriedrichs inequality∇ · Vh = Φh
unified and optimal a priori and a posteriori error analysisM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
IntroductionModel problem (S inhomogeneous and anisotropic)
u = −S∇p,∇ · u = f in Ω −∇ · (S∇p) = f in Ωp = 0 on ∂Ω p = 0 on ∂Ω
Mixed finite elements(S−1uh,vh)− (ph,∇ · vh) = 0 ∀vh ∈ Vh,
(∇ · uh, φh) = (f , φh) ∀φh ∈ ΦhTraditional analysis
weak mixed formulation(S−1u,v)− (p,∇ · v) = 0
∀v ∈ H(div,Ω),(∇ · u, φ) = (f , φ) ∀φ ∈ L2(Ω)
inf–sup condition∇ · Vh = Φh
Presented analysisclassical weak formulation
(S∇p,∇ϕ) = (f , ϕ)∀ϕ ∈ H10 (Ω)
postprocessing and discreteFriedrichs inequality∇ · Vh = Φh
unified and optimal a priori and a posteriori error analysisM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
IntroductionModel problem (S inhomogeneous and anisotropic)
u = −S∇p,∇ · u = f in Ω −∇ · (S∇p) = f in Ωp = 0 on ∂Ω p = 0 on ∂Ω
Mixed finite elements(S−1uh,vh)− (ph,∇ · vh) = 0 ∀vh ∈ Vh,
(∇ · uh, φh) = (f , φh) ∀φh ∈ ΦhTraditional analysis
weak mixed formulation(S−1u,v)− (p,∇ · v) = 0
∀v ∈ H(div,Ω),(∇ · u, φ) = (f , φ) ∀φ ∈ L2(Ω)
inf–sup condition∇ · Vh = Φh
Presented analysisclassical weak formulation
(S∇p,∇ϕ) = (f , ϕ)∀ϕ ∈ H10 (Ω)
postprocessing and discreteFriedrichs inequality∇ · Vh = Φh
unified and optimal a priori and a posteriori error analysisM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
IntroductionModel problem (S inhomogeneous and anisotropic)
u = −S∇p,∇ · u = f in Ω −∇ · (S∇p) = f in Ωp = 0 on ∂Ω p = 0 on ∂Ω
Mixed finite elements(S−1uh,vh)− (ph,∇ · vh) = 0 ∀vh ∈ Vh,
(∇ · uh, φh) = (f , φh) ∀φh ∈ ΦhTraditional analysis
weak mixed formulation(S−1u,v)− (p,∇ · v) = 0
∀v ∈ H(div,Ω),(∇ · u, φ) = (f , φ) ∀φ ∈ L2(Ω)
inf–sup condition∇ · Vh = Φh
Presented analysisclassical weak formulation
(S∇p,∇ϕ) = (f , ϕ)∀ϕ ∈ H10 (Ω)
postprocessing and discreteFriedrichs inequality∇ · Vh = Φh
unified and optimal a priori and a posteriori error analysisM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Bilinear forms and weak solution
Definition (Bilinear form B)
B(p, ϕ) :=∑
K∈Th
(S∇p,∇ϕ)K , p, ϕ ∈ H1(Th).
Definition (Bilinear form A)
A(u,v) :=∑
K∈Th
(u,S−1v)K , u,v ∈ L2(Ω).
Definition (Weak solution)
p ∈ H10 (Ω) such that B(p, ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω) ;or
p ∈ H10 (Ω) such that A(S∇p,S∇ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Bilinear forms and weak solution
Definition (Bilinear form B)
B(p, ϕ) :=∑
K∈Th
(S∇p,∇ϕ)K , p, ϕ ∈ H1(Th).
Definition (Bilinear form A)
A(u,v) :=∑
K∈Th
(u,S−1v)K , u,v ∈ L2(Ω).
Definition (Weak solution)
p ∈ H10 (Ω) such that B(p, ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω) ;or
p ∈ H10 (Ω) such that A(S∇p,S∇ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Bilinear forms and weak solution
Definition (Bilinear form B)
B(p, ϕ) :=∑
K∈Th
(S∇p,∇ϕ)K , p, ϕ ∈ H1(Th).
Definition (Bilinear form A)
A(u,v) :=∑
K∈Th
(u,S−1v)K , u,v ∈ L2(Ω).
Definition (Weak solution)
p ∈ H10 (Ω) such that B(p, ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω) ;or
p ∈ H10 (Ω) such that A(S∇p,S∇ϕ) = (f , ϕ) ∀ϕ ∈ H10 (Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Energy norms
Definition (Energy semi-norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈ H1(Th).
Definition (Energy norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈W k0 (Th).
Definition (Energy norm)
|||v|||2∗ := A(v,v), v ∈ L2(Ω).
Definition (Energy–div norm)
|||v|||2∗,div := |||v|||2∗ + ‖∇ · v‖2, v ∈ H(div,Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Energy norms
Definition (Energy semi-norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈ H1(Th).
Definition (Energy norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈W k0 (Th).
Definition (Energy norm)
|||v|||2∗ := A(v,v), v ∈ L2(Ω).
Definition (Energy–div norm)
|||v|||2∗,div := |||v|||2∗ + ‖∇ · v‖2, v ∈ H(div,Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Energy norms
Definition (Energy semi-norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈ H1(Th).
Definition (Energy norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈W k0 (Th).
Definition (Energy norm)
|||v|||2∗ := A(v,v), v ∈ L2(Ω).
Definition (Energy–div norm)
|||v|||2∗,div := |||v|||2∗ + ‖∇ · v‖2, v ∈ H(div,Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Energy norms
Definition (Energy semi-norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈ H1(Th).
Definition (Energy norm)
|||ϕ|||2 := B(ϕ,ϕ), ϕ ∈W k0 (Th).
Definition (Energy norm)
|||v|||2∗ := A(v,v), v ∈ L2(Ω).
Definition (Energy–div norm)
|||v|||2∗,div := |||v|||2∗ + ‖∇ · v‖2, v ∈ H(div,Ω).
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
An abstract result for the flux variable
Theorem (Abstract framework (scheme-independent))
Let v,w, t ∈ L2(Ω) be arbitrary. Then|||v−w|||∗ ≤ |||w− t|||∗ +
∣∣∣∣A(v−w, v− t|||v− t|||∗)∣∣∣∣ .
A priori error estimate|||u− uh|||∗ ≤ |||u− Πhu|||∗A posteriori error estimate
put v = u, w = uh, t = −S∇s with s ∈ H10 (Ω) arbitrary:
|||u− uh|||∗ ≤ |||uh + S∇s|||∗ +∣∣∣∣A(u− uh, u + S∇s|||u + S∇s|||∗
)∣∣∣∣notice that A(u,−S∇ϕ) = (f , ϕ) (here ϕ = p − s/|||p − s|||)notice that A(uh,−S∇ϕ) = (πl(f ), ϕ)
get |||u−uh|||∗≤ infs∈H10 (Ω)
|||uh +S∇s|||∗+
{∑K∈Th
CPh2KcS,K
‖f−πl(f )‖2K
}12
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
An abstract result for the flux variable
Theorem (Abstract framework (scheme-independent))
Let v,w, t ∈ L2(Ω) be arbitrary. Then|||v−w|||∗ ≤ |||w− t|||∗ +
∣∣∣∣A(v−w, v− t|||v− t|||∗)∣∣∣∣ .
A priori error estimateput v = uh, w = u, t = Πhu:
|||uh − u|||∗ ≤ |||u− Πhu|||∗ +∣∣∣∣A(uh − u, uh − Πhu|||uh − Πhu|||∗
)∣∣∣∣notice that A(uh − u,uh − Πhu) = 0 in MFEsget |||u− uh|||∗ ≤ |||u− Πhu|||∗
A priori error estimate|||u− uh|||∗ ≤ |||u− Πhu|||∗
A posteriori error estimateput v = u, w = uh, t = −S∇s with s ∈ H10 (Ω) arbitrary:
|||u− uh|||∗ ≤ |||uh + S∇s|||∗ +∣∣∣∣A(u− uh, u + S∇s|||u + S∇s|||∗
)∣∣∣∣notice that A(u,−S∇ϕ) = (f , ϕ) (here ϕ = p − s/|||p − s|||)notice that A(uh,−S∇ϕ) = (πl(f ), ϕ)
get |||u−uh|||∗≤ infs∈H10 (Ω)
|||uh +S∇s|||∗+
{∑K∈Th
CPh2KcS,K
‖f−πl(f )‖2K
}12
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
An abstract result for the flux variable
Theorem (Abstract framework (scheme-independent))
Let v,w, t ∈ L2(Ω) be arbitrary. Then|||v−w|||∗ ≤ |||w− t|||∗ +
∣∣∣∣A(v−w, v− t|||v− t|||∗)∣∣∣∣ .
A priori error estimate|||u− uh|||∗ ≤ |||u− Πhu|||∗A posteriori error estimate
put v = u, w = uh, t = −S∇s with s ∈ H10 (Ω) arbitrary:
|||u− uh|||∗ ≤ |||uh + S∇s|||∗ +∣∣∣∣A(u− uh, u + S∇s|||u + S∇s|||∗
)∣∣∣∣notice that A(u,−S∇ϕ) = (f , ϕ) (here ϕ = p − s/|||p − s|||)notice that A(uh,−S∇ϕ) = (πl(f ), ϕ)
get |||u−uh|||∗≤ infs∈H10 (Ω)
|||uh +S∇s|||∗+
{∑K∈Th
CPh2KcS,K
‖f−πl(f )‖2K
}12
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
An abstract result for the flux variable
Theorem (Abstract framework (scheme-independent))
Let v,w, t ∈ L2(Ω) be arbitrary. Then|||v−w|||∗ ≤ |||w− t|||∗ +
∣∣∣∣A(v−w, v− t|||v− t|||∗)∣∣∣∣ .
A priori error estimate|||u− uh|||∗ ≤ |||u− Πhu|||∗A posteriori error estimate
put v = u, w = uh, t = −S∇s with s ∈ H10 (Ω) arbitrary:
|||u− uh|||∗ ≤ |||uh + S∇s|||∗ +∣∣∣∣A(u− uh, u + S∇s|||u + S∇s|||∗
)∣∣∣∣notice that A(u,−S∇ϕ) = (f , ϕ) (here ϕ = p − s/|||p − s|||)notice that A(uh,−S∇ϕ) = (πl(f ), ϕ)
get |||u−uh|||∗≤ infs∈H10 (Ω)
|||uh +S∇s|||∗+
{∑K∈Th
CPh2KcS,K
‖f−πl(f )‖2K
}12
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Postprocessing for the scalar variablePostprocessing in mixed finite elements
Arnold and Brezzi ’85: Mixed and nonconforming finiteelement methods: implementation, postprocessing anderror estimatesBramble and Xu ’89: A local post-processing technique forimproving the accuracy in mixed finite-elementapproximationsStenberg ’91: Postprocessing schemes for some mixedfinite elementsArbogast and Chen ’95: On the implementation of mixedmethods as nonconforming methods for second-orderelliptic problemsChen ’96: Equivalence between and multigrid algorithmsfor nonconforming and mixed methods for second-orderelliptic problems
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Postprocessing for the scalar variable
Postprocessing in mixed finite elements
Usually used in order to implement MFEMs and getsuperconvergence for the postprocessed variable.Usually not used in order to get a priori or a posteriori errorestimates.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Postprocessing for the scalar variable
Postprocessing in mixed finite elements
Usually used in order to implement MFEMs and getsuperconvergence for the postprocessed variable.Usually not used in order to get a priori or a posteriori errorestimates.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Proof: 0 = −(∇p̃h,vσK ,L)K∪L − (p̃h,∇ · vσK ,L)K∪L= −〈vσK ,L · n, p̃h〉∂K − 〈vσK ,L · n, p̃h〉∂L= 〈vσK ,L · nK , p̃h|L − p̃h|K 〉σK ,L
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
Lowest-order Raviart–Thomas case
Definition (Postprocessed scalar variable p̃h)
We define p̃h such that, separately on each K ∈ Th,−SK∇p̃h|K = uh|K (flux of p̃h is uh),(p̃h,1)K/|K | = pK (mean of p̃h on K is pK ).
Properties of p̃hp̃h exists and is unique (it is a pw second-order polynomial)p̃h is nonconforming, 6∈ H10 (Ω), only ∈ H1(Th) in generalmeans of traces of p̃h on the sides continuous, p̃h∈W 00 (Th)the means are equal to the Lagrange multipliers from thehybridization
Remarksexact (not weak) connection of p̃h and uhonly valid in the lowest-order case on simplices or, when Sis diagonal, on rectangular parallelepipeds
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Flux variable Scalar variable
General postprocessing
Definition (Postprocessed scalar variable p̃h (Arbogast & Chen))
We define p̃h such that, separately on each K ∈ Th,(p̃h, φh)K = (ph, φh)K ∀φh ∈ Φh(K ).(p̃h, µh)σ = (λh, µh)σ ∀µh ∈ Λh(σ) ∀σ ∈ E inth .
Properties of p̃hp̃h exists and is uniquep̃h is nonconforming, 6∈ H10 (Ω), but p̃h ∈W k0 (Th)p̃h is in general a nonconforming polynomial plus a bubblep̃h satisfies −(S−1uh,vh)K = (∇p̃h,vh)K ∀vh ∈ Vh(K )
Remarksuh is a PVh,S−1 projection of −S∇p̃h onto Vh, weakconnection of p̃h and uhbasis of our a priori and a posteriori error estimates
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Lowest-order Raviart–Thomas case
Lowest-order Raviart–Thomas case
|||p − p̃h||| = |||u− uh|||∗ ≤ |||u− Πhu|||∗ ≤ Chp̃h ∈W 00 (Th): discrete Friedrichs inequality
‖p − p̃h‖ ≤ C12DF
{∑K∈Th
‖∇(p − p̃h)‖2K
} 12
optimal value of CDF (only depends on the shape regularityparameter and infb∈Rd{thickb(Ω)}): Vohralík, NFAO 2005
consequently:{∑
K∈Th ‖p − p̃h‖21,K} 1
2 ≤ Ch
superconvergence: ‖p − p̃h‖ ≤ Ch2
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Lowest-order Raviart–Thomas case
Lowest-order Raviart–Thomas case
|||p − p̃h||| = |||u− uh|||∗ ≤ |||u− Πhu|||∗ ≤ Chp̃h ∈W 00 (Th): discrete Friedrichs inequality
‖p − p̃h‖ ≤ C12DF
{∑K∈Th
‖∇(p − p̃h)‖2K
} 12
optimal value of CDF (only depends on the shape regularityparameter and infb∈Rd{thickb(Ω)}): Vohralík, NFAO 2005
consequently:{∑
K∈Th ‖p − p̃h‖21,K} 1
2 ≤ Ch
superconvergence: ‖p − p̃h‖ ≤ Ch2
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Lowest-order Raviart–Thomas case
Lowest-order Raviart–Thomas case
|||p − p̃h||| = |||u− uh|||∗ ≤ |||u− Πhu|||∗ ≤ Chp̃h ∈W 00 (Th): discrete Friedrichs inequality
‖p − p̃h‖ ≤ C12DF
{∑K∈Th
‖∇(p − p̃h)‖2K
} 12
optimal value of CDF (only depends on the shape regularityparameter and infb∈Rd{thickb(Ω)}): Vohralík, NFAO 2005
consequently:{∑
K∈Th ‖p − p̃h‖21,K} 1
2 ≤ Ch
superconvergence: ‖p − p̃h‖ ≤ Ch2
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Lowest-order Raviart–Thomas case
Lowest-order Raviart–Thomas case
|||p − p̃h||| = |||u− uh|||∗ ≤ |||u− Πhu|||∗ ≤ Chp̃h ∈W 00 (Th): discrete Friedrichs inequality
‖p − p̃h‖ ≤ C12DF
{∑K∈Th
‖∇(p − p̃h)‖2K
} 12
optimal value of CDF (only depends on the shape regularityparameter and infb∈Rd{thickb(Ω)}): Vohralík, NFAO 2005
consequently:{∑
K∈Th ‖p − p̃h‖21,K} 1
2 ≤ Ch
superconvergence: ‖p − p̃h‖ ≤ Ch2
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Lowest-order Raviart–Thomas case
Lowest-order Raviart–Thomas case
|||p − p̃h||| = |||u− uh|||∗ ≤ |||u− Πhu|||∗ ≤ Chp̃h ∈W 00 (Th): discrete Friedrichs inequality
‖p − p̃h‖ ≤ C12DF
{∑K∈Th
‖∇(p − p̃h)‖2K
} 12
optimal value of CDF (only depends on the shape regularityparameter and infb∈Rd{thickb(Ω)}): Vohralík, NFAO 2005
consequently:{∑
K∈Th ‖p − p̃h‖21,K} 1
2 ≤ Ch
superconvergence: ‖p − p̃h‖ ≤ Ch2
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Lowest-order Raviart–Thomas case General case
General case
General case
a little bit more complicated since we only haveuh = −PVh,S−1(S∇p̃h) instead of uh = −S∇p̃hone still easily recovers all the known a priori errorestimates for mixed finite elements
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Problems:What is C?What does it depend on?How does it depend on data?
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
What is/should be an a posteriori error estimate
Usual form‖p − ph‖2 .
∑K∈Th ηK (ph)
2.Can be used to determine mesh elements with large error.We can then refine these elements: mesh adaptivity.
Reliability‖p − ph‖2 ≤ C
∑K∈Th ηK (ph)
2
Guaranteed upper bound‖p − ph‖2 ≤
∑K∈Th ηK (ph)
2
Local efficiencyηK (ph)2 ≤ C2eff,K
∑L close to K ‖p − ph‖2L
Asymptotic exactness∑K∈Th ηK (ph)
2/‖p − ph‖2 → 1Robustness
independence of the data variation or mesh propertiesNegligible evaluation cost
estimators which can be evaluated locallyM. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Previous works on a posteriori analysis for MFEMs
Previous works . . .Alonso ’96Braess and Verfürth ’96Carstensen ’97Hoppe and Wohlmuth ’97, ’99Kirby ’03El Alaoui and Ern ’04Wheeler and Yotov ’05Lovadina and Stenberg ’06
. . . do not cover
evaluation of the constants (guaranteed upper bound )robustnessasymptotic exactnessan analysis of the convection–diffusion case
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Previous works on a posteriori analysis for MFEMs
Previous works . . .Alonso ’96Braess and Verfürth ’96Carstensen ’97Hoppe and Wohlmuth ’97, ’99Kirby ’03El Alaoui and Ern ’04Wheeler and Yotov ’05Lovadina and Stenberg ’06
. . . do not cover
evaluation of the constants (guaranteed upper bound )robustnessasymptotic exactnessan analysis of the convection–diffusion case
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A first abstract estimate for the flux
Theorem (A first abstract estimate for the flux and its efficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) be arbitrary. Then
|||u− uh|||2∗ ≤ infs∈H10 (Ω)
|||uh + S∇s|||2∗ +CF,Ωh2Ω
cS,Ω‖f −∇ · uh‖2
≤ |||u− uh|||2∗ +CF,Ωh2Ω
cS,Ω‖f −∇ · uh‖2.
PropertiesGuaranteed upper bound (no undetermined constant).|||uh + S∇s|||∗ penalizes uh 6= −S∇s for some s ∈ H10 (Ω).Advantage: scheme-independent (promoted by Repin).Disadvantage: scheme-independent (no information fromthe computation used).Disadvantage: C1/2F,Ω hΩ/c
1/2S,Ω‖f −∇ · uh‖ too big.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A first abstract estimate for the flux
Theorem (A first abstract estimate for the flux and its efficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) be arbitrary. Then
|||u− uh|||2∗ ≤ infs∈H10 (Ω)
|||uh + S∇s|||2∗ +CF,Ωh2Ω
cS,Ω‖f −∇ · uh‖2
≤ |||u− uh|||2∗ +CF,Ωh2Ω
cS,Ω‖f −∇ · uh‖2.
PropertiesGuaranteed upper bound (no undetermined constant).|||uh + S∇s|||∗ penalizes uh 6= −S∇s for some s ∈ H10 (Ω).Advantage: scheme-independent (promoted by Repin).Disadvantage: scheme-independent (no information fromthe computation used).Disadvantage: C1/2F,Ω hΩ/c
1/2S,Ω‖f −∇ · uh‖ too big.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An improved abstract estimate for the flux
Theorem (An improved abstract estimate for the flux and itsefficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤ infs∈H10 (Ω)
|||uh + S∇s|||2∗ + η2R ≤ |||u− uh|||2∗ + η2R,
whereηR :=
{∑K∈Th
CPh2KcS,K
‖f − πl(f )‖2K
} 12
.
PropertiesNo global Galerkin orthogonality needed, just localconservativity.ηR is in general a higher-order term for RT methods.ηR is not in general a higher-order term for BDM methods.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An improved abstract estimate for the flux
Theorem (An improved abstract estimate for the flux and itsefficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤ infs∈H10 (Ω)
|||uh + S∇s|||2∗ + η2R ≤ |||u− uh|||2∗ + η2R,
whereηR :=
{∑K∈Th
CPh2KcS,K
‖f − πl(f )‖2K
} 12
.
PropertiesNo global Galerkin orthogonality needed, just localconservativity.ηR is in general a higher-order term for RT methods.ηR is not in general a higher-order term for BDM methods.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An energy–div norm abstract estimate for the flux
Theorem (An energy–div norm abstract estimate for the fluxand its efficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then|||u− uh|||2∗,div ≤ inf
s∈H10 (Ω)|||uh + S∇s|||2∗ + ‖f − πl(f )‖2 + η2R
≤ |||u− uh|||2∗,div + η2R.
PropertiesηR gets always a higher-order term.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An energy–div norm abstract estimate for the flux
Theorem (An energy–div norm abstract estimate for the fluxand its efficiency)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then|||u− uh|||2∗,div ≤ inf
s∈H10 (Ω)|||uh + S∇s|||2∗ + ‖f − πl(f )‖2 + η2R
≤ |||u− uh|||2∗,div + η2R.
PropertiesηR gets always a higher-order term.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the flux
Theorem (A fully computable estimate for the flux)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤∑
K∈Th
(η2P,K + η
2R,K
),
|||u− uh|||2∗,div ≤∑
K∈Th
(η2P,K + η
2R,K + η
2D,K
).
potential estimatorηP,K := |||uh + S∇(IOs(p̃h))|||∗,KIOs(p̃h): Oswald interpolate Pn(Th)→ Pn(Th) ∩ H10 (Ω)
residual estimatorηR,K :=
C1/2P hKc1/2S,K‖f − πl (f )‖K
divergence estimatorηD,K := ‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the flux
Theorem (A fully computable estimate for the flux)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤∑
K∈Th
(η2P,K + η
2R,K
),
|||u− uh|||2∗,div ≤∑
K∈Th
(η2P,K + η
2R,K + η
2D,K
).
potential estimatorηP,K := |||uh + S∇(IOs(p̃h))|||∗,KIOs(p̃h): Oswald interpolate Pn(Th)→ Pn(Th) ∩ H10 (Ω)
residual estimatorηR,K :=
C1/2P hKc1/2S,K‖f − πl (f )‖K
divergence estimatorηD,K := ‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the flux
Theorem (A fully computable estimate for the flux)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤∑
K∈Th
(η2P,K + η
2R,K
),
|||u− uh|||2∗,div ≤∑
K∈Th
(η2P,K + η
2R,K + η
2D,K
).
potential estimatorηP,K := |||uh + S∇(IOs(p̃h))|||∗,KIOs(p̃h): Oswald interpolate Pn(Th)→ Pn(Th) ∩ H10 (Ω)
residual estimatorηR,K :=
C1/2P hKc1/2S,K‖f − πl (f )‖K
divergence estimatorηD,K := ‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the flux
Theorem (A fully computable estimate for the flux)
Let u be the weak flux and let uh ∈ H(div,Ω) such that∇ · uh = πl(f ) be arbitrary. Then
|||u− uh|||2∗ ≤∑
K∈Th
(η2P,K + η
2R,K
),
|||u− uh|||2∗,div ≤∑
K∈Th
(η2P,K + η
2R,K + η
2D,K
).
potential estimatorηP,K := |||uh + S∇(IOs(p̃h))|||∗,KIOs(p̃h): Oswald interpolate Pn(Th)→ Pn(Th) ∩ H10 (Ω)
residual estimatorηR,K :=
C1/2P hKc1/2S,K‖f − πl (f )‖K
divergence estimatorηD,K := ‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An abstract estimate for the potential
Theorem (Abstract a posteriori estimate for the potential and itsefficiency)
Let p be the weak potential and let p̃h ∈ H1(Th) be arbitrary.Then
|||p − p̃h|||2 ≤ infs∈H10 (Ω)
|||p̃h − s|||2
+ inft∈H(div,Ω)
supϕ∈H10 (Ω), |||ϕ|||=1
((f−∇·t, ϕ)−(S∇p̃h +t,∇ϕ))2
≤2|||p − p̃h|||2.
PropertiesGuaranteed upper bound, quasi-exact, and robust.Holds uniformly for any mesh (anisotropic) and polynomialdegree of ph.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
An abstract estimate for the potential
Theorem (Abstract a posteriori estimate for the potential and itsefficiency)
Let p be the weak potential and let p̃h ∈ H1(Th) be arbitrary.Then
|||p − p̃h|||2 ≤ infs∈H10 (Ω)
|||p̃h − s|||2
+ inft∈H(div,Ω)
supϕ∈H10 (Ω), |||ϕ|||=1
((f−∇·t, ϕ)−(S∇p̃h +t,∇ϕ))2
≤2|||p − p̃h|||2.
PropertiesGuaranteed upper bound, quasi-exact, and robust.Holds uniformly for any mesh (anisotropic) and polynomialdegree of ph.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A first computable estimate for the potential
Theorem (A first computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) be arbitrary.Take any th ∈ H(div,Ω) and any sh ∈ H10 (Ω). Then
|||p − p̃h|||2 ≤|||p̃h − sh|||2+
(C1/2F,Ω hΩ
c1/2S,Ω‖f −∇·th‖+|||S∇p̃h + th|||∗
)2.
Properties|||S∇p̃h + th|||∗ penalizes −S∇p̃h 6∈ H(div,Ω).|||p̃h − sh||| penalizes p̃h 6∈ H10 (Ω).Advantage: scheme-independent.
Disadvantage: C1/2F,Ω hΩ/c1/2S,Ω‖f −∇ · th‖ too big.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A first computable estimate for the potential
Theorem (A first computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) be arbitrary.Take any th ∈ H(div,Ω) and any sh ∈ H10 (Ω). Then
|||p − p̃h|||2 ≤|||p̃h − sh|||2+
(C1/2F,Ω hΩ
c1/2S,Ω‖f −∇·th‖+|||S∇p̃h + th|||∗
)2.
Properties|||S∇p̃h + th|||∗ penalizes −S∇p̃h 6∈ H(div,Ω).|||p̃h − sh||| penalizes p̃h 6∈ H10 (Ω).Advantage: scheme-independent.
Disadvantage: C1/2F,Ω hΩ/c1/2S,Ω‖f −∇ · th‖ too big.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the potential
Theorem (A fully computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
|||p − p̃h|||2 ≤∑
K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
nonconformity estimatorηNC,K := |||p̃h − IOs(p̃h)|||K
diffusive flux estimatorηDF,K := |||uh + S∇p̃h|||∗,K
residual estimator
ηR,K :=C1/2P hK
c1/2S,K‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the potential
Theorem (A fully computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
|||p − p̃h|||2 ≤∑
K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
nonconformity estimatorηNC,K := |||p̃h − IOs(p̃h)|||K
diffusive flux estimatorηDF,K := |||uh + S∇p̃h|||∗,K
residual estimator
ηR,K :=C1/2P hK
c1/2S,K‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the potential
Theorem (A fully computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
|||p − p̃h|||2 ≤∑
K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
nonconformity estimatorηNC,K := |||p̃h − IOs(p̃h)|||K
diffusive flux estimatorηDF,K := |||uh + S∇p̃h|||∗,K
residual estimator
ηR,K :=C1/2P hK
c1/2S,K‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
A fully computable estimate for the potential
Theorem (A fully computable estimate for the potential)
Let p be the weak potential and let p̃h ∈ H1(Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
|||p − p̃h|||2 ≤∑
K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
nonconformity estimatorηNC,K := |||p̃h − IOs(p̃h)|||K
diffusive flux estimatorηDF,K := |||uh + S∇p̃h|||∗,K
residual estimator
ηR,K :=C1/2P hK
c1/2S,K‖f − πl (f )‖K
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Local efficiency of the estimates
Theorem (Local efficiency of the estimates)Let p,u be the weak potential and flux, respectively, and let uhbe the MFE flux and p̃h the postprocessed potential. Then
ηDF,K ≤ |||u− uh|||∗,K + |||p − p̃h|||K ,ηP,K ≤ ηDF,K + ηNC,K ,
ηNC,K ≤ C
√CS,KcS,TK
|||p − p̃h|||TK ,
ηR,K ≤ C
√CS,KcS,K
|||u− uh|||∗,K ,
where C depends only on the space dimension d, the maximalpolynomial degree n of p̃h, the shape regularity parameter κT ,and the polynomial degree m of f .
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Local efficiency of the estimates
Proof for ηNC,K .
Oswald interpolate (Karakashian and Pascal ’03, Burmanand Ern ’07):
‖∇(ϕh − IOs(ϕh))‖2K ≤ C∑σ∈ẼK
h−1σ ‖[[ϕh]]‖2σ
Achdou, Bernardi, Coquel ’03:
h− 12σ ‖[[p̃h]]‖σ ≤ C
∑L;σ∈EL
‖∇(p̃h − ϕ)‖L
η2NC,K = |||p̃h − IOs(p̃h)|||2K ≤ CCS,K∑σ∈ẼK
h−1σ ‖[[p̃h]]‖2σ
≤ CCS,K∑L∈TK
‖∇(p − p̃h)‖2L ≤ CCS,KcS,TK
∑L∈TK
|||p − p̃h|||2L
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Estimates for the flux Estimates for the potential Efficiency
Local efficiency of the estimates
Proof for ηR,K .
‖f − πl(f )‖K = ‖f −∇ · uh‖K ≤ CC1/2S,K h
−1K |||u− uh|||∗,K
element bubble functionsequivalence of norms on finite-dimensional spacesweak solution definitionGreen theoremCauchy–Schwarz inequalityenergy norm definitioninverse inequality
residual estimator is always efficient (also for BDM)
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Comments on the estimates
General comments
p ∈ H1(Ω), no additional regularityno convexity of Ω neededno saturation assumptionno Helmholtz decompositionno shape-regularity needed for the upper bounds (only forthe efficiency proofs)polynomial degree-independent upper boundno “monotonicity” hypothesis on inhomogeneitiesdistributionthe only important tool: optimal Poincaré–Friedrichs andtrace inequalitiesholds from diffusion to convection–diffusion–reaction cases
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
L2(Ω) estimates
Theorem (Estimate for p̃h in the L2(Ω)-norm)
Let p be the weak potential and let p̃h ∈W 00 (Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
‖p − p̃h‖2 ≤CDFcS,Ω
∑K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
Theorem (Estimate for ph in the L2(Ω)-norm)
Let p be the weak potential and let ph ∈ Φh, p̃h ∈W 00 (Th), anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
‖p−ph‖ ≤
CDFcS,Ω ∑K∈Th{η2NC,K + (ηR,K + ηDF,K )
2}
12
+‖p̃h−ph‖.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
L2(Ω) estimates
Theorem (Estimate for p̃h in the L2(Ω)-norm)
Let p be the weak potential and let p̃h ∈W 00 (Th) anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
‖p − p̃h‖2 ≤CDFcS,Ω
∑K∈Th
{η2NC,K + (ηR,K + ηDF,K )
2}.
Theorem (Estimate for ph in the L2(Ω)-norm)
Let p be the weak potential and let ph ∈ Φh, p̃h ∈W 00 (Th), anduh ∈ H(div,Ω) such that ∇ · uh = πl(f ) be arbitrary. Then
‖p−ph‖ ≤
CDFcS,Ω ∑K∈Th{η2NC,K + (ηR,K + ηDF,K )
2}
12
+‖p̃h−ph‖.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Some additional comments
Some additional comments
We believe that L2(Ω) norm is not optimal for a posteriorierror estimates in mixed finite elements.We believe that trying to directly and only derive estimatesfor ph in the L2(Ω)-norm was the bottleneck of a lot ofprevious works.|||uh + S∇p̃h|||∗,K or |||uh + S∇(IOs(p̃h))|||∗,K (ourestimates): clear physical meaninghK |||uh + S∇ph|||∗,K = hK |||uh|||∗,K in RT0 (some previousworks): no good sense
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Pure diffusion problem −∇ · (S∇p) = f , p = 0 on ∂ΩTheorem (Mixed FEM for the diffusion problem)There holds|||p − p̃h||| ≤ inf
s∈H10 (Ω)|||p̃h − s|||+
{∑K∈Th
CPh2K
cS,K‖f − fK‖2K
} 12
.
Theorem (Galerkin FEM for the diffusion problem)There holds |||p − ph||| ≤ inf
sh∈Vh|||p − sh|||.
Mixed FEM 1D:no nonconformity, p̃h ∈ H10 (Ω)|||p − p̃h||| ≤ Ch2 when f ∈ H1(Th)p̃h = p, the exact solution, for pw constant S (arbitraryinhomogeneities) and pw constant f
Galerkin FEM 1D:|||p − p̃h||| ≤ Ch
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Pure diffusion problem −∇ · (S∇p) = f , p = 0 on ∂ΩTheorem (Mixed FEM for the diffusion problem)There holds|||p − p̃h||| ≤ inf
s∈H10 (Ω)|||p̃h − s|||+
{∑K∈Th
CPh2K
cS,K‖f − fK‖2K
} 12
.
Theorem (Galerkin FEM for the diffusion problem)There holds |||p − ph||| ≤ inf
sh∈Vh|||p − sh|||.
Mixed FEM 1D:no nonconformity, p̃h ∈ H10 (Ω)|||p − p̃h||| ≤ Ch2 when f ∈ H1(Th)p̃h = p, the exact solution, for pw constant S (arbitraryinhomogeneities) and pw constant f
Galerkin FEM 1D:|||p − p̃h||| ≤ Ch
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Pure diffusion problem −∇ · (S∇p) = f , p = 0 on ∂ΩTheorem (Mixed FEM for the diffusion problem)There holds|||p − p̃h||| ≤ inf
s∈H10 (Ω)|||p̃h − s|||+
{∑K∈Th
CPh2K
cS,K‖f − fK‖2K
} 12
.
Theorem (Galerkin FEM for the diffusion problem)There holds |||p − ph||| ≤ inf
sh∈Vh|||p − sh|||.
Mixed FEM 1D:no nonconformity, p̃h ∈ H10 (Ω)|||p − p̃h||| ≤ Ch2 when f ∈ H1(Th)p̃h = p, the exact solution, for pw constant S (arbitraryinhomogeneities) and pw constant f
Galerkin FEM 1D:|||p − p̃h||| ≤ Ch
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Comments L2(Ω) estimates RT0 and pure diffusion problems
Pure diffusion problem −∇ · (S∇p) = f , p = 0 on ∂ΩTheorem (Mixed FEM for the diffusion problem)There holds|||p − p̃h||| ≤ inf
s∈H10 (Ω)|||p̃h − s|||+
{∑K∈Th
CPh2K
cS,K‖f − fK‖2K
} 12
.
Theorem (Galerkin FEM for the diffusion problem)There holds |||p − ph||| ≤ inf
sh∈Vh|||p − sh|||.
Mixed FEM 1D:no nonconformity, p̃h ∈ H10 (Ω)|||p − p̃h||| ≤ Ch2 when f ∈ H1(Th)p̃h = p, the exact solution, for pw constant S (arbitraryinhomogeneities) and pw constant f
Galerkin FEM 1D:|||p − p̃h||| ≤ Ch
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
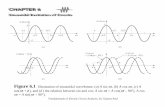
Problem with discontinuous and inhomogeneousdiffusion tensor
consider the pure diffusion equation
−∇ · (S∇p) = 0 in Ω = (−1,1)× (−1,1)discontinuous and inhomogeneous S, two cases:
−1 0 1−1
0
1
s1=5s
2=1
s3=5 s
4=1
−1 0 1−1
0
1
s1=100s
2=1
s3=100 s
4=1
analytical solution: singularity at the origin
p(r , θ)|Ωi = rα(ai sin(αθ) + bi cos(αθ))
(r , θ) polar coordinates in Ωai , bi constants depending on Ωiα regularity of the solution
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Analytical solutions
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
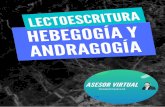
Estimated and actual error distribution on anadaptively refined mesh, case 1
0.005
0.01
0.015
0.02
0.025
0.03
0.035
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
0.005
0.01
0.015
0.02
0.025
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Approximate solution and the correspondingadaptively refined mesh, case 2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
−1−0.5
00.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
xy
p
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
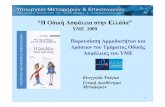
Estimated and actual error against the number ofelements in uniformly/adaptively refined meshes
102
103
104
105
10−2
10−1
100
101
Number of triangles
Ene
rgy
erro
r
error uniformestimate uniformerror adapt.estimate adapt.
102
103
104
105
100
101
102
Number of triangles
Ene
rgy
erro
r
error uniformestimate uniformerror adapt.estimate adapt.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Global efficiency of the estimates
102
103
104
105
1.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
1.55
1.6
Number of triangles
Effi
cien
cy
efficiency uniformefficiency adapt.
102
103
104
105
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Number of triangles
Effi
cien
cy
efficiency uniformefficiency adapt.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Convection-dominated problem
consider the convection–diffusion–reaction equation
−ε4p +∇ · (p(0,1)) + p = f in Ω = (0,1)× (0,1)
analytical solution: layer of width a
p(x , y) = 0.5(
1− tanh(0.5− x
a
))consider
ε = 1, a = 0.5ε = 10−2, a = 0.05ε = 10−4, a = 0.02
unstructured grid of 46 elements given,uniformly/adaptively refined
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Analytical solutions, ε = 1, a = 0.5 and ε = 10−4,a = 0.02
0.2
0.3
0.4
0.5
0.6
0.7
0.8
00.2
0.40.6
0.81
00.2
0.40.6
0.81
0.2
0.3
0.4
0.5
0.6
0.7
0.8
xy
p
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
00.2
0.40.6
0.81
00.2
0.40.6
0.810
0.2
0.4
0.6
0.8
1
xy
p
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Estimated and actual error distribution, ε = 1, a = 0.5
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5x 10
−3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.5
1
1.5
2
2.5
3
x 10−3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Modified Oswald interpolate: estimated and actualerror against the number of elements and globalefficiency of the estimates, ε = 1, a = 0.5
101
102
103
104
105
10−5
10−4
10−3
10−2
10−1
100
Number of triangles
Ene
rgy
erro
r
error uniformest. uniformest. res. uniformest. nonc. uniformest. upw. uniformest. conv. uniform
101
102
103
104
105
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85
Number of triangles
Effi
cien
cy
efficiency uniform
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Oswald interpolate: estimated and actual error againstthe number of elements and global efficiency of theestimates, ε = 1, a = 0.5
101
102
103
104
105
10−5
10−4
10−3
10−2
10−1
100
Number of triangles
Ene
rgy
erro
r
error uniformest. uniformest. res. uniformest. nonc. uniformest. upw. uniformest. conv. uniform
101
102
103
104
105
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
Number of triangles
Effi
cien
cy
efficiency uniform
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Estimated and actual error distribution, ε = 10−2,a = 0.05
2
4
6
8
10
12
x 10−3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2x 10
−3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Approximate solution and the correspondingadaptively refined mesh, ε = 10−4, a = 0.02
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
00.2
0.40.6
0.81
00.2
0.40.6
0.810
0.2
0.4
0.6
0.8
1
xy
p
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
y
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Estimated and actual error against the number ofelements in uniformly/adaptively refined meshes,ε = 10−2, a = 0.05 and ε = 10−4, a = 0.02
101
102
103
104
105
10−3
10−2
10−1
100
101
Number of triangles
Ene
rgy
erro
r
error uniformestimate uniformerror adapt.estimate adapt.
101
102
103
104
105
10−2
10−1
100
101
Number of triangles
Ene
rgy
erro
r
error uniformestimate uniformerror adapt.estimate adapt.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C. Inhomogeneous diffusion Dominating convection
Global efficiency of the estimates, ε = 10−2, a = 0.05and ε = 10−4, a = 0.02
101
102
103
104
105
2
3
4
5
6
7
8
9
10
11
12
Number of triangles
Effi
cien
cy
efficiency uniformefficiency adapt.
101
102
103
104
105
10
20
30
40
50
60
70
80
90
100
Number of triangles
Effi
cien
cy
efficiency uniformefficiency adapt.
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
Outline1 General framework
An abstract result for the flux variablePostprocessing for the scalar variable
2 A priori error estimatesLowest-order Raviart–Thomas caseGeneral case
3 A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
4 RemarksComments on the estimatesL2(Ω) estimatesRT0 and pure diffusion problems
5 Numerical experiments6 Conclusions and future work
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
Conclusions and future work
Conclusionsunified framework for a priori and a posteriori error controlin mixed finite elementsoptimality of the framework for a posteriori error estimation:guaranteed upper bound, local efficiency, asymptoticexactness, robustness, negligible evaluation costdirectly implementable—all constants evaluatedparallel work for finite volumes, discontinuous Galerkinfinite elements, and continuous finite elements
Future workfull asymptotic exactness and robustnessnonlinear (degenerate) casesextensions to other types of problems (Stokes,Navier–Lamé, Maxwell)systems of equations
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
Conclusions and future work
Conclusionsunified framework for a priori and a posteriori error controlin mixed finite elementsoptimality of the framework for a posteriori error estimation:guaranteed upper bound, local efficiency, asymptoticexactness, robustness, negligible evaluation costdirectly implementable—all constants evaluatedparallel work for finite volumes, discontinuous Galerkinfinite elements, and continuous finite elements
Future workfull asymptotic exactness and robustnessnonlinear (degenerate) casesextensions to other types of problems (Stokes,Navier–Lamé, Maxwell)systems of equations
M. Vohralík Unified a priori and a posteriori analysis of MFEs
Framework A priori est. A posteriori est. Remarks Exp. C.
BibliographyPapers
VOHRALÍK M., Unified primal formulation-based a priori and aposteriori error analysis of mixed finite element methods, to besubmitted.VOHRALÍK M., A posteriori error estimates for lowest-order mixedfinite element discretizations of convection–diffusion–reactionequations, SIAM J. Numer. Anal. 45 (2007), 1570–1599.VOHRALÍK M., Residual flux-based a posteriori error estimatesfor finite volume discretizations of inhomogeneous, anisotropic,and convection-dominated problems, submitted to Numer. Math.ERN A., STEPHANSEN, A. F., VOHRALÍK M., Improved energynorm a posteriori error estimation based on flux reconstructionfor discontinuous Galerkin methods, submitted to SIAM J.Numer. Anal.VOHRALÍK M., Guaranteed and fully robust a posteriori errorestimates for conforming discretizations of diffusion problemswith discontinuous coefficients, submitted to Math. Comp.
Thank you for your attention!M. Vohralík Unified a priori and a posteriori analysis of MFEs
General frameworkAn abstract result for the flux variablePostprocessing for the scalar variable
A priori error estimatesLowest-order Raviart--Thomas caseGeneral case
A posteriori error estimatesEstimates for the fluxEstimates for the potentialLocal efficiency
RemarksComments on the estimatesL2() estimatesRT0 and pure diffusion problems
Numerical experiments
Conclusions and future work