Static load and dynamic forced performance of rigid rotor ...rotorlab.tamu.edu/me626/MATHCAD/Short...
13
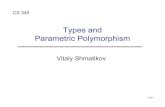
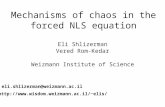
Static load and dynamic forced performance of rigid rotor supported on short length journal bearings (includes thermal effects) MEEN 626. Luis San Andres (c) Dr. Luis San Andres, UT/2000 Disk 2M Journal bearing X Y 2F o disk Clearanc e circle Ωt e Static load u Rigid shaft Figure 5.1. Rigid rotor supported on journal bearings. (u) imbalance, (e) journal eccentricity Updated 09/04/09 ORIGIN 1 := rotor properties bearing 2M K rot DATA for rotor W T 500 lbf ⋅ := Rotor weight Load per bearing W W T 2 := W 1.112 10 3 × newton = 1/2 rotor mass M W g := M 250 lb = Rotor stiffness on each side of disk (at midspan) k shaft 40 10 6 ⋅ N m ⋅ := Rotor_sag W k shaft := Rotor sag at midspan: k shaft 2.284 10 5 × lbf in = Rotor_sag 1.095 10 3 − × in = rotor properties bearing geometry BEARING GEOMETRY D 6 in ⋅ := journal diameter R D 2 := journal radius Static shaft deflection due to rotor weight = % of clearance bearing length L 2 in ⋅ := c 0.003 in ⋅ := radial clearance Rotor_sag c 0.365 = L D 0.333 = bearing geometry
Transcript of Static load and dynamic forced performance of rigid rotor ...rotorlab.tamu.edu/me626/MATHCAD/Short...

Static load and dynamic forced performance of rigid rotorsupported on short length journal bearings (includesthermal effects) MEEN 626. Luis San Andres (c)
Dr. Luis San Andres, UT/2000
Disk 2M
Journal bearing
X
Y
2Fo
disk
Clearance circle
Ωt
e
Static load
u Rigid shaft
Figure 5.1. Rigid rotor supported on journal bearings.(u) imbalance, (e) journal eccentricity
Updated 09/04/09
ORIGIN 1:=
rotor properties
bearing
2MKrot
bearing
2MKrot 2MKrot
DATA for rotorWT 500 lbf⋅:= Rotor weight
Load per bearingWWT
2:=
W 1.112 103× newton=
1/2 rotor massMWg
:= M 250 lb=
Rotor stiffness on each side of disk (at midspan)kshaft 40 106⋅Nm
⋅:=
Rotor_sagW
kshaft:= Rotor sag at midspan:
kshaft 2.284 105×lbfin
=Rotor_sag 1.095 10 3−× in=
rotor properties
bearing geometry
BEARING GEOMETRY
D 6 in⋅:= journal diameter RD2
:= journal radius
Static shaft deflection due to rotorweight = % of clearance
bearing lengthL 2 in⋅:=
c 0.003 in⋅:= radial clearance Rotor_sagc
0.365=LD
0.333=
bearing geometry

RPM_max 10000:= MAXIMUM & design speeds Nmax 50:=# of cases for analysis
RPMdesign 7200:=
a 0.2 c⋅:= Amplitude of imbalance on rotor diskMechanical energy convected by lubricant.κ 0.8:=Thermal model conditionsHeat carry over - thermal mixing coefficient.λ 0.70:=
Tsupply 50K:= Supply Oil Temperature Take deg-K as deg-C
Lubricant properties
PROPERTIES OF LUBRICANT MOBIL velocite No 10 (ISO VG 22)
μsupply 0.0143N s⋅
m2⋅:= Lubricant viscosity at Tsupply in Pa-sec.
α 0.0281K
⋅:= Alpha coefficient for viscosity equation.
ρ 862kg
m3⋅:= Density in kg/m3.
Cp 1880J
kg K⋅⋅:= Specific Heat in kJ/(kg C).
Lubricant properties
Calculations
CALCULATIONS =======FIND journal eccentricity as rotor speed increases for given load
DrRPM_max
Nmax( ):= step in rpm n 1 Nmax..:= Tsupply 50 K=
rpmn Dr n( )⋅:= rotor running speed(rpm)
Ωn rpmnπ
30⋅
radsec
⋅:= rotor speed(rad/sec) krpmrpm1000
:=
itmax 10:= Max iterations for thermal loop VISCOSITY formula
μ T( ) μsupply eα− T Tsupply−( )⋅
⋅:=
Journal eccentricity ratio and attitude angle for STATIC equilibrium
Find journal eccentricity and operating temperatures
εguess 0.8:= Ttrial Tsupply 20K+:=ITERATIVE LOOP -Given load, find operatingeccentricity & find temperature rise

SteadyJB ε rpm, Tguess, ( ) it 0←
x ε←
N rpm1
60 sec⋅⋅←
Ω rpmπ
30 sec⋅⋅←
Teff Tguess←
Tguess Teff 1.1⋅←
it it 1+←
μ μsupply eα− Teff Tsupply−( )⋅
⋅←
σ πμ N⋅ L⋅ D⋅
WRc
⎛⎜⎝⎞⎟⎠
2⋅
⎡⎢⎣
⎤⎥⎦
⋅LD
⎛⎜⎝⎞⎟⎠
2⋅←
ε root1 x2−( )2
x π2 1 x2−( )⋅ 16 x2⋅+⋅
σ− x, ⎡⎢⎢⎣
⎤⎥⎥⎦
←
Power Ω( )2μ R3⋅ L⋅
π
c⋅⎛⎜⎝
⎞⎟⎠⋅
1
1 ε2−( ) .5
⋅←
Q0 c R⋅ L⋅ 1 ε+( )( )⋅Ω
2⋅←
Qπ c R⋅ L⋅ 1 ε−( )( )⋅Ω
2⋅←
Qe c R⋅ L⋅ ε⋅ Ω⋅←
δTπ
κ Power⋅( )
ρ Cp⋅ Q0Qe
2−
⎛⎜⎝
⎞⎟⎠
⋅
⎡⎢⎢⎣
⎤⎥⎥⎦
1 λQπ
Q0⋅+
←
δTin λQπ
Q0
⎛⎜⎝
⎞⎟⎠
⋅ δTπ⋅←
Tπ Tsupply δTπ+←
Tin Tsupply δTin+←
Tguess Teff←
Teff 0.5 Tin Tπ+( )⋅←
x ε←
it itmax<( ) Teff Tguess− 0.1K>( )∧while
:=
Speed in rev/sec
Speed in rad/sec
Guess (set) Effective temperature
effective viscosity
σ = short length bearingSommerfeld #
Root solver: find eccentricity ε forspecified Sommerfeld #
Power loss
Qo = inlet flow rate, θ=0
Qπ = flow rate at min film θ=π(start of cavitation zone
Exit flow (side flow)
Temperature rise at θ=π
Thermal energy equations areprobably incorrect. Please checkthem with those in handout
Temperature rise at inlet plane
Max temperature at θ=π
δT T TS−=
Effective temperature
Supply flow rate

Qsupply Q0 λ Qπ⋅−←
εTπ
KTin
KTeff
KPowerwatt
Qsupplys
m3⋅ σ
⎛⎜⎝
⎞⎟⎠
return
εn TπnTinn
Teff nPowern Qsupplyn
σn( ) SteadyJB .1 rpmn, Ttrial, ( ):=
convert to physical units
Teff Teff 1⋅ K:= Tin Tin 1⋅ K:=Power Power watt⋅:= Tπ Tπ 1⋅ K:=
Qsupply Qsupply 60000⋅:= LPMQsidesnc R⋅ L⋅ εn⋅ Ωn⋅ 60000⋅:=
effective viscosity: deg-C (actual)μ_n μsupply e
α− Teff nTsupply−( )⋅
⋅:=
Journal Attitude angleϕn atan
π 1 εn( )2−⋅
4 εn⋅
⎡⎢⎣
⎤⎥⎦
180π
⋅:=
Calculations
STATIC LOAD PERFORMANCE: journal cccentricity and attitude angle
0 2 4 6 8 100
0.10.20.30.40.50.60.70.80.9
1
rotor speed (krpm)
jour
nal e
ccen
trici
ty e
/c
0 2 4 6 8 100
102030405060708090
rotor speed (kRPM)
Atti
tude
ang
le (d
eg)
ε W 250 lbf=φc 3 10 3−× in=
POWER LOSS (kW) on each bearing
0 2 4 6 8 100
2.385
4.769
7.154
9.539
rotor speed (kRPM)
Pow
er (k
W) p
er b
earin
g
WL D⋅
20.833 psi=
L 2 in=D 6 in=

0 2 4 6 8 100
1
2
3
4
5
QsupplyQsides
rotor speed (krpm)
Bea
ring
inle
t flo
w ra
te (L
PM)
LUBRICANT FLOW RATE (LPM)
FILM temperatures: effective, inlet to film, exit at 180deg Tsupply 50 K=
0 2 4 6 8 1050
55
60
65
70
T (pi)T inlet filmT effec
Exit Temperature vs. Rotor Speed
Rotor Speed (krpm)
Exit
Tem
pera
ture
(C)
Tπ
Tin
Teff
krpm
*

OTHER BEARING OPERATING PARAMETERS
Minimum Film Thickness h2nc 1 εn−( )⋅⎡⎣ ⎤⎦ 106⋅:=
0 2 4 6 8 100
16
32
48
64
80Minimum Film Thickness vs. Speed
Rotor Speed (krpm)
Film
Thi
ckne
ss (u
m)
h2
krpm
c 0.076 mm=
Effective viscosity (C-Poise)
0 2 4 6 8 100
5
10
Viscosity vs. Rotor Speed
Rotor Speed (krpm)
Effe
ctiv
e vi
scos
ity (c
-Poi
se)
μ_ 1000⋅
krpm
μ Tsupply( ) 0.014 Ns
m2⋅=
7Friction Coefficientμfn
PowernΩn R⋅ W⋅
:=
0 2 4 6 8 100
0.05
0.1
0.15Coefficient of Friction vs. Rotor Speed
Rotor Speed (krpm)
Coe
ffic
ient
of F
rictio
n
μf
krpm

Reynolds NumberRen ρ Ωn⋅ R⋅
cμ_n
⋅:=
0 2 4 6 8 100
200
400
600
800
Rotor Speed (krpm)
Rey
nold
s Num
ber
Ren
Ren 1 εn+( )⋅
Ren 1 ε−( )n⎡⎣ ⎤⎦⋅
krpmn
Force coefficients evaluation
Short length journal bearing: rotordynamic force coefficients at equilibrium position
fron
4 σn⋅ εn( )2⋅
1 εn( )2−⎡⎣ ⎤⎦2
:= fton
π σn⋅ εn⋅
1 εn( )2−⎡⎣ ⎤⎦1.5
:=
Dimensional Stiffness (Fo=W)Dimensionless Stiffness
kxxn
fron
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fron( )2 1+ 2 εn( )2⋅+⎡
⎣⎤⎦
⋅:=Fon
μ_n Ωn⋅Lc
⎛⎜⎝⎞⎟⎠
2⋅ L⋅ R⋅
4 σn⋅:=
kyyn
fron
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fton( )2 1+ εn( )2−⎡
⎣⎤⎦
⋅:=Kxxn
kxxn
Fon
c⋅:=
kyxn
fton
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fron( )2 1− εn( )2+⎡
⎣⎤⎦
⋅:= Kyynkyyn
Fon
c⋅:=
Kyxnkyxn
Fon
c⋅:=
kxyn
fton
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fron( )2 1+ 2 εn( )2⋅+⎡
⎣⎤⎦
⋅:=
Kxynkxyn
Fon
c⋅:=
MATRIX of STIFFNESSES Kbn
Kxxn
Kyxn
Kxyn
Kyyn
⎛⎜⎜⎝
⎞⎟⎟⎠
:=

Dimensionless DampingDimensional DampingCoefficients
cxxn
2 fton⋅
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fron( )2 2 εn( )2+⎡⎣ ⎤⎦⋅ 1+ εn( )2−⎡
⎣⎤⎦
⋅:=
Cxxncxxn
Fon
c Ωn⋅⋅:=
cyyn
2 fton⋅
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fton( )2 2 εn( )2+⎡⎣ ⎤⎦⋅ 1− εn( )2+⎡
⎣⎤⎦
⋅:=Cyyn
cyyn
Fon
c Ωn⋅⋅:=
cxyn
2 fron⋅
εn 1 εn( )2−⎡⎣ ⎤⎦⋅fton( )2 2 εn( )2+⎡⎣ ⎤⎦⋅ 1− εn( )2+⎡
⎣⎤⎦
⋅:=Cxyn
cxyn
Fon
c Ωn⋅⋅:=
cyxncxyn
:= CyxnCxyn
:=
MATRIX OF DAMPING COEFFS Cbn
Cxxn
Cyxn
Cxyn
Cyyn
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Force coefficients evaluation
STIFFNESS AND DAMPING COEFFICIENTS
0 2 4 6 8 105− 107×
0
5 107×
1 108×
1.5 108×
2 108×
KxxKyyKxy-Kyx
Rotor Speed (krpm)
Stiff
ness
(N/m
)
0 2 4 6 8 100
10
20
30
CxxCyyCxyCyx
Rotor Speed (krpm)
Dam
ping
(N.s/
m)

Equivalent bearing stiffness for rigid rotorkeqn
kxxncyyn
⋅ kyyncxxn
⋅+ cyxnkxyn
⋅− cxynkyxn
⋅−
cxxncyyn
+:=
0 2 4 6 8 102.2 107×
2.3 107×
2.4 107×
2.5 107×
2.6 107×
2.7 107×
2.8 107×
rotor speed (krpm)
Equi
v. S
tiffn
ess (
N/m
)
Whirl frequency ratioWFRn
keqnkxxn
−( ) keqnkyyn
−( )⋅ kxynkyxn
⋅−
cxxncyyn
⋅ cxyncyxn
⋅−:=
0 2.5 5 7.5 100.35
0.4
0.45
0.5
0.55
Rotor Speed (krpm)
whi
rl fr
eque
ncy
ratio

Threshold speed of instability(krpm)
Ωtn
keqnFon
⋅
M c⋅
30π
⎛⎜⎝⎞⎟⎠
WFRn⋅:=
0 1.25 2.5 3.75 5 6.25 7.5 8.75 100
2.882
5.765
8.647
11.53Rigid Rotor
rotor speed (krpm)
Thre
shol
d sp
eed
(krp
m)
Ωt1000
krpm
krpm
Critical Rotor Mass for rigid rotor
Recall the rotor mass: 2 M⋅ 226.796 kg=Mcn
keqnFon
⋅
c Ωn( )2⋅ WFRn( )2⋅:=
McRn2 Mcn
⋅:=
0 1.25 2.5 3.75 5 6.25 7.5 8.75 100.1
1
10
100
rotor speed (krpm)
Mcr
titic
al/R
otor
Mas
s
McR2 M⋅
krpm

Effect of shaft flexibility on threshold speed of instability:Threshold speed of instability calculated including rotor sag at midspan.
Natural Frequency (rpm) of Flexible ShaftΩtf n
Ωtn
1 keqn
Rotor_sagc
⋅+⎛⎜⎝⎞⎟⎠
12
:=
ωnnWFRn Ωtf n
⋅:=
0 2 4 6 8 100
2.5
5
7.5
10
12.5
15
flex rotorrigid rotornat. freq rotsync line
Flexible Rotor
rotor speed (krpm)
Thre
shol
d sp
eed
(krp
m)
Ωtf1000
Ωt1000
ωn1000
krpm
krpm
kshaft 4 107×Nm
=
Rotor_sagc
0.365=
The thresholdspeed ofinstability is lowerfor the flexiblerotor than for therigid rotor model.

Synchronous response of flexible rotor due to imbalance
The equations of motion for both rotor and journal bearings are given below. Thecoordinates of rotor and disk motion have origin at the static equilibrium position.
k kshaft:=Let:ROTOR MASSLESS BEARINGS
md2 X⋅
dt2
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅ k X x−( )⋅+ m a⋅ ω2⋅ cos ω t⋅( )⋅=
CI J, ( )
dxdt
dydt
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
⋅ KI J, ( )x
y⎛⎜⎝
⎞⎟⎠
⋅+ k−x X−
y Y−⎛⎜⎝
⎞⎟⎠
⋅=
md2 Y⋅
dt2
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅ k Y y−( )⋅+ m a⋅ ω2⋅ sin ω t⋅( )⋅=
a 1.524 10 5−× m= imbalance displacement ac
0.2=
The rotor disk (X,Y) and journal center displacements (x,y) are synchronous withthe imbalance excitation, i.e.
X Xc cos ω t⋅( )⋅ Xs sin ω t⋅( )⋅+= Y Yc cos ω t⋅( )⋅ Ys sin ω t⋅( )⋅+=
x xc cos ω t⋅( )⋅ xs sin ω t⋅( )⋅+= y yc cos ω t⋅( )⋅ ys sin ω t⋅( )⋅+=
Find the solution. Define UNIT matrix I21
0
0
1⎛⎜⎝
⎞⎟⎠
:=
Rotor (complex) displacements
Xn
Yn
⎛⎜⎝
⎞⎟⎠
Ωn( )2− M⋅ I2⋅ Cbni⋅ Ωn⋅( ) Kbn
+⎡⎣ ⎤⎦1− 1
kshaftI2⋅+⎡
⎢⎣
⎤⎥⎦
1−+
⎡⎢⎣
⎤⎥⎦
1−M a⋅ Ωn( )2⋅
i− M a⋅ Ωn( )2⋅⎡⎣ ⎤⎦⋅
⎡⎢⎢⎣
⎤⎥⎥⎦
⋅:=
Journal (complex) displacements
xn
yn
⎛⎜⎝
⎞⎟⎠
kshaft I2⋅ Cbni⋅ Ωn⋅( ) Kbn
+⎡⎣ ⎤⎦+⎡⎣ ⎤⎦
1− kshaft⋅Xn
Yn
⎛⎜⎝
⎞⎟⎠
⋅:=
Amplitudes of rotor and journal motion
XmnXn:= Ymn
Yn:=

xmnxn:= ymn
yn:=
show responses in dimensionless form (amplitude/clearance)
0 2 4 6 8 100
0.2
0.4
0.6
0.8
X/cY/c
Imbalance response Rotor center
rotor speed (krpm)
Rot
or c
ente
r (X
& Y
)
ROTORCENTER
ac
0.2=
0 2 4 6 8 100
0.1
0.2
0.3
X/cY/c
Imbalance response - journals
rotor speed (krpm)
Jour
nal d
isps
(X
& Y
)
JOURNALSCENTER
Exercise: Calculate the major and minor axes of the ellipses describing the (X,Y)motions. See Appendix A of Childs' Rotordynamics Book:.