Signaux aléatoiressylvain.tisserant.perso.luminy.univ-amu.fr/signal/chapitre 10.pdf · Un signal...
32
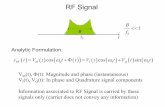
S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 1 Signaux aléatoires A. Définitions A.1. Description probabiliste La notion de signal aléatoire est plus ou moins intuitive. Mais pour être capable de les traiter nous devons en donner une définition formelle. Un signal aléatoire peut être défini comme une fonction x(t,α) à deux paramètres. Le premier représente le temps (continu ou discret) et l’autre une variable aléatoire. Pour une valeur donnée de α, x α (t) = x(t,α) est une réalisation du signal temporel. On parle aussi d’échantillon ou de trajectoire (fig. 10-1). Fig. 10-1 : Quatre réalisations ou échantillons d’un même processus stochastique Citons à titre d’exemple quelques signaux aléatoires : - ) t sin( A ) t ( X ϕ + ϖ = avec ϕ aléatoire uniformément distribué entre 0 et 2 π ; - ) t sin( A ) t ( X ϕ + ϖ = avec A et ϕ indépendants et aléatoires ; - X(t) = A avec A suivant une loi de Gauss. Il est cependant souvent difficile de définir un signal aléatoire d’une manière aussi compacte.
Transcript of Signaux aléatoiressylvain.tisserant.perso.luminy.univ-amu.fr/signal/chapitre 10.pdf · Un signal...

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 1
Signaux aléatoires A. Définitions
A.1. Description probabiliste La notion de signal aléatoire est plus ou moins intuitive. Mais pour être capable de les traiter nous devons en donner une définition formelle. Un signal aléatoire peut être défini comme une fonction x(t,α) à deux paramètres. Le premier représente le temps (continu ou discret) et l’autre une variable aléatoire. Pour une valeur donnée de α, xα(t) = x(t,α) est une réalisation du signal temporel. On parle aussi d’échantillon ou de trajectoire (fig. 10-1).
Fig. 10-1 : Quatre réalisations ou échantillons d’un même processus stochastique Citons à titre d’exemple quelques signaux aléatoires :
- )tsin(A)t(X ϕ+ω= avec ϕ aléatoire uniformément distribué entre 0 et 2 π ;
- )tsin(A)t(X ϕ+ω= avec A et ϕ indépendants et aléatoires ; - X(t) = A avec A suivant une loi de Gauss.
Il est cependant souvent difficile de définir un signal aléatoire d’une manière aussi compacte.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 2
A chaque instant t, X(t) = x(t,α) est une variable aléatoire. Le signal aléatoire peut donc être décrit par une densité de probabilité que nous noterons p(x,t) ou une fonction de répartition F(x,t). Nous avons :
[ ]x)t(XP)t,x(F ≤=
[ ]x
)t,x(F)t,x(pdxx)t(XxPdx)t,x(p
∂∂=⇒+<≤=
La densité p(x,t) est dite densité de probabilité du premier ordre. Il est également important de pouvoir décrire les relations pouvant exister entre tout couple de variables aléatoires prises à deux instants t1 et t2. Pour cela nous définissons la fonction de répartition et la densité de probabilité de deuxième ordre, avec :
[ ]22112211 x)t(X;x)t(XP)t,x;t,x(F ≤≤=
21
22112
2211 xx
)t,x;t,x(F)t,x;t,x(p
∂∂∂
=
De manière similaire nous pouvons également définir des probabilités d’ordres supérieurs.
A.2. Stationnarité Un signal aléatoire est dit stationnaire (au sens strict) si toutes ses propriétés statistiques, à tous les ordres, sont invariantes dans le temps. C’est-à-dire que les deux signaux X(t) et Y(t) = X(t + τ) ont les mêmes propriétés statistiques. Dans la pratique on se limite très souvent aux signaux aléatoires stationnaires du deuxième ordre, pour lesquels les propriétés statistiques d’ordre 1 et 2 sont indépendantes des instants d’observation. Nous avons alors :
)x(p)t,x(pet)x(F)t,x(F ==
2x
2x
22x µ)x(E)t,x(Eetµ)x(E)t,x(E σ+====
12212211212211 ttavec),x,x(p)t,x;t,x(pet),x,x(F)t,x;t,x(F −=ττ=τ= La probabilité du premier ordre est indépendante du temps et celle du deuxième ordre ne dépend que de l’intervalle séparant les deux instants d’observation. Les deux figures suivantes illustrent cette notion. Le premier signal aléatoire (fig. 10-2.a) est stationnaire au deuxième ordre au moins, alors que les trois autres exemples ne sont pas stationnaires.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 3
Fig. 10-2 : Exemples d’un processus stochastique stationnaire au 2ème ordre (a) et d’un processus stochastique non stationnaire (b).
Fig. 10-3 : Exemples de deux processus stochastiques non stationnaires.
A.3. Ergodisme Considérons un échantillon (ou trajectoire) d’un signal aléatoire, que nous notons x(t) pour alléger l’écriture. C’est un signal temporel dont nous pouvons calculer la valeur moyenne :
∫∞→=
T
0Tdt)t(x
T
1limx
Un signal aléatoire est dit ergodique si ses valeurs moyennes statistiques sont identiques à ses valeurs moyennes temporelles. C’est-à-dire pour un signal stationnaire :
∫∫ ∞→
∞+
∞−=⇔=
T
0
n
T
nnn dt)t(xT
1limdx)x(pxx)x(E
Il est alors possible d’estimer les propriétés statistiques d’un signal aléatoire par l’analyse temporelle d’un de ses échantillons.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 4
B. Autocorrélation statistique et densité spectrale de puissance
B.1. Fonction d’autocorrélation statistique La fonction d’autocorrélation statistique d’un signal aléatoire X(t) est définie par :
[ ] )xx(E)t(X)t(XE)t,t(R 212121X == Soit :
∫ ∫∞+
∞−
∞+
∞−= 2122112121X dxdx)t,x;t,x(pxx)t,t(R
en se souvenant que x1 = X(t1) et x2 = X(t2). La fonction d’autocovariance est définie comme la variance du couple x1 et x2 :
)x(E)x(E)xx(E)t,t(C 212121X −= Pour un signal stationnaire, la densité de probabilité du deuxième ordre ne dépend que de l’intervalle τ = t2 – t1. Il en est donc de même pour les fonctions d’autocorrélation et d’autocovariance :
2XX212121X )x(E)(R)(Cetdxdx),x,x(pxx)(R −τ=ττ=τ ∫ ∫
∞+
∞−
∞+
∞−
Nous avons les propriétés suivantes :
)(C)(Cet)(R)(R XXXX τ=τ−τ=τ−
2xX
2x
2x
2X )0(Cetµ)x(E)0(R σ=σ+==
RX(0) représente l’espérance mathématique de la puissance du signal. L’inégalité de Cauchy-Schwartz permet de montrer que :
2x
2xX
2x
2xXXXX µ)(Rµet)0(C)(C;)0(R)(R σ+≤τ≤σ−≤τ≤τ
Cela permet d’introduire la fonction d’autocovariance normalisée :
)0(C
)(C)(
X
XX
τ=τρ
B.2. Densité spectrale de puissance Considérons un signal aléatoire stationnaire X(t). Comme son comportement est indépendant du temps, donc jusqu’à l’infini, il est comparable aux signaux déterministes à énergie infinie.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 5
Pour ce type de signaux nous avons défini (cf. chap. 8) la densité spectrale de puissance à partir du signal mutilé sur un intervalle de largeur T, en cherchant la limite lorsque T tend vers l’infini :
T
)(X)(Xlim)(S
*TT
Tx
νν=ν
∞→
Attention aux notations ! Dans l’expression précédente XT(ν) représente la transformée de Fourier du signal tronqué. Procédons de même pour un signal aléatoire stationnaire. Considérons le signal aléatoire mutilé XT(t) qui se confond avec X(t) sur l’intervalle [0, T] et est nul à l’extérieur. Pour tout échantillon xT(t) de ce signal aléatoire tronqué nous pouvons calculer sa transformée de Fourier :
[ ] ∫ ω−=T
0
tjT dte)t(x)t(xTF
Ce qui définit une grandeur aléatoire, la transformée de Fourier du signal aléatoire TF[XT(t)], qui correspond à l’ensemble des transformées des échantillons de XT(t). Par analogie avec les signaux déterministes à énergie infinie définissons la quantité suivante :
[ ] 2Tx )t(xTF
T
1)T,( =νΦ
Elle nous donne la densité spectrale de puissance de l’échantillon lorsque T tend vers l’infini. Pour chaque échantillon donné xT(t) cette quantité est appelée périodogramme de la réalisation. Il s’agit d’une variable aléatoire dont nous pouvons calculer l’espérance mathématique. Nous pouvons écrire :
∫ ∫∫∫ −ω−ωω− ==νΦT
0
T
0
)ut(jT
0
ujT
0
tjx dudte)u(x)t(x
T
1due)u(xdte)t(x
T
1)T,(
Calculons l’espérance mathématique de ce périodogramme :
[ ] [ ]∫ ∫ −ω−=νΦT
0
T
0
)ut(jx dudte)u(x)t(xE
T
1)T,(E
[ ] ∫ ∫ −ω−=νΦT
0
T
0
)ut(jXx dudte)u,t(R
T
1)T,(E
Si le signal est stationnaire nous avons :
[ ] ∫ ∫ −ω−−=νΦT
0
T
0
)ut(jXx dudte)ut(R
T
1)T,(E

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 6
Effectuons un changement de variable avec v = t – u. Il vient :
[ ] ∫ ∫∫ ∫ −ω−− ω− =−=νΦ
T
0
t
Tt
vjX
T
0
Tt
t
vjXx dtdve)v(R
T
1dtdve)v(R
T
1)T,(E
Le domaine d’intégration est défini par :
tvTtetTt0 ≤≤−≤≤ Dans le plan (t, v) c’est un losange (fig. 10-4). Celui-ci se décompose en deux triangles que nous pouvons mettre sous la forme :
≤≤≤≤
+≤≤≤≤−
TtvTv0pour
Tvt00vTpour
Fig. 10-4 : Domaine d’intégration pour calcul de l’espérance mathématique d’un périodogramme, avant (à gauche) et après (à droite) le changement de variable.
Cette observation nous permet de décomposer le calcul de l’espérance du périodogramme en une somme de deux termes et d’inverser l’ordre des intégrations pour écrire :
[ ] ∫ ∫∫ ∫ ω−−
+ ω− +=νΦT
0
T
v
vjX
0
T
Tv
0
vjXx dvdte)v(R
T
1dvdte)v(R
T
1)T,(E
[ ] ∫∫ ω−−
ω− −++=νΦT
0
vjX
0
T
vjXx dve)v(R)vT(
T
1dve)v(R)Tv(
T
1)T,(E
Ce qui nous donne :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 7
[ ] ∫−ω−
−=νΦ
T
T
vjXx dve)v(R
T
v1)T,(E
Nous reconnaissons une fonction triangle de base [-T, T]. Nous pouvons donc écrire :
[ ] ∫∫∞+
∞−
ω−
−
ω−
Λ=
Λ=νΦ dve)v(RT
vdve)v(R
T
v)T,(E vj
X
T
T
vjXx
Soit encore :
[ ]
τΛτ=νΦT
)(RTF)T,(E Xx
A la limite lorsque T tend vers l’infini :
[ ] ∫∞+
∞−ω−
∞→=νΦ dte)t(R)T,(Elim tj
XxT
L’espérance mathématique du périodogramme tend vers la transformée de Fourier de la fonction d’autocorrélation statistique du signal aléatoire. De par sa construction, nous pouvons définir cette limite comme la densité spectrale de puissance du processus stochastique. Nous obtenons un résultat similaire à ce que nous avions obtenu, dans le chapitre 8, que pour un signal déterministe. La densité spectrale d’énergie, ou de puissance, d’un signal déterministe est égale à la transformée de Fourier de son autocorrélation. Pour les signaux aléatoires stationnaires nous avons le théorème de Wiener-Khintchine : La densité spectrale de puissance d’un signal aléatoire stationnaire est égale à la transformée de Fourier de sa fonction d’autocorrélation statistique :
[ ])(RTF)(S XX τ=ν Nous pouvons donc écrire :
[ ])(STF)(R X1
X ν=τ − C’est-à-dire :
νν=τ τνπ∞+
∞−∫ de)(S)(R 2jXX
Pour τ = 0 nous avons :
νν== ∫∞+
∞−d)(S)0(R)x(E XX
2
L’espérance mathématique de la puissance du signal aléatoire est égale à l’intégrale sur tout le spectre en fréquence de la densité spectrale de puissance. La définition est donc cohérente. En pratique la densité spectrale de puissance d’un processus stochastique peut être obtenue en calculant la valeur moyenne d’un grand nombre de périodogrammes.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 8
C. Illustrations
C.1. Premier exemple Considérons le signal aléatoire défini par :
)t(sinA)t(X ϕ+ω= pour lequel A et ω sont des constantes alors que la phase à l’origine ϕ est aléatoire, uniformément distribuée sur l’intervalle [0, 2π[. Dans un premier temps déterminons ses fonctions de répartition F(x, t) et densité de probabilité p(x, t). Partons de la définition :
[ ]x)t(XP)t,x(F ≤= Notons φ(t) la phase instantanée modulo 2π :
)2(t)t( πϕ+ω≡φ Cherchons tout d’abord le domaine de définition de la phase instantanée φ(t) pour que :
x)]t([sinA)t(X ≤φ= Pour cela nous pouvons nous aider de la figure 10-5. Elle montre que nous devons distinguer quatre cas :
[ ]
π≤
π
−π∪
≤≤
+π
−π≤≤−
∅−<
2,0xA
2,A
xsinarc
A
xsinarc,0Ax0
A
xsinarc2,
A
xsinarc0xA
Ax
A un instant t donné, la phase instantanée est une variable aléatoire uniformément distribuée sur [0, 2π[. Dans chacun des cas la probabilité est donc proportionnelle à la largeur du domaine de définition. Le calcul est facile et se résume à :
[ ]
>∀=
−∈∀
π+=
−<∀=
Ax1)x(F
A,AxA
xarcsin
1
2
1)x(F
Ax0)x(F

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 9
La fonction de répartition ne dépend pas de t. Pour la densité de probabilité nous avons :
x
)t,x(F)t,x(p
∂∂=
Ce qui nous donne :
] [A,AxxA
1)x(p
22−∈∀
−π=
La figure 10-6 présente l’allure de ces deux fonctions.
Fig. 10-5 : Recherche de φ tel que A sin(φ) ≤ x.
Fig. 10-6 : Fonction de répartition et densité de probabilité du signal aléatoire décrit en C.1.
La fonction de répartition et la densité de probabilité ne dépendant pas du temps le signal est stationnaire. Calculons les deux premiers moments. L’espérance mathématique est nulle :
0dx)x(px)x(E == ∫∞+
∞−
Le calcul direct du moment d’ordre deux est possible :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 10
2
Adx
xA
1xdx)x(px)x(E
2A
A 22
222 =−π
== ∫∫+
−
∞+
∞−
Mais il est plus facile de calculer la variance en écrivant :
2
A
2
d)t(sinAd)(px)x(E
22
0
222
0
22 =πϕϕ+ω=ϕϕ= ∫∫
ππ
Calculons les moyennes temporelles (valeurs moyenne et efficace) correspondantes pour un échantillon quelconque et comparons. La moyenne est nulle :
0dt)tsin(AT
1limx
2/T
2/TT=ϕ+ω= ∫
+
−∞→
Calculons la puissance moyenne :
∫+
−∞→ϕ+ω=
2/T
2/T
22
T
2 dt)t(sinAT
1limx
Calculons d’abord l’intégrale :
∫∫+
−
+
−
ω−=ϕ+ω=2/T
2/T
22/T
2/T
22 dt2
)t2cos(1
T
Adt)t(sinA
T
1I
ωω−=
ωω−=
+
−
)Tsin(T
T2
A
2
)t2sin(t
T2
AI
22/T
2/T
2
Puis prenons la limite il vient :
2
Ax
22 =
Le signal est ergodique. Calculons la fonction d’autocorrélation statistique :
∫ ∫∞+
∞−
∞+
∞−= 2122112121X dxdx)t,x;t,x(pxx)t,t(R
Comme nous avons :
)t(sinA)t(Xxet)t(sinA)t(Xx 222111 ϕ+ω==ϕ+ω==

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 11
Nous pouvons écrire :
[ ])tt(cos2
A
2
d)t(sinA)t(sinA)t,t(R 12
22
02121X −ω=
πϕϕ+ωϕ+ω= ∫
π
Ce qui nous donne :
12
2
21X ttavec)(cos2
A)t,t(R −=τωτ=
Le signal étant stationnaire la fonction d’autocorrélation statistique ne dépend que de l’intervalle séparant les deux instants t1 et t2. Si nous comparons à un résultat obtenu dans le chapitre 8 (§ B.2.) nous constatons que les fonctions d’autocorrélation statistique et temporelle sont identiques.
C.2. Deuxième exemple Considèrons le signal aléatoire défini par :
tsinA)t(X ω= où A est une variable aléatoire gaussienne centrée, de variance σ2 et où ω est une constante. Ce signal, assez proche du précédent, est-il stationnaire ? Est-il ergodique ? Commençons par calculer espérance mathématique et variance. Nous avons :
0dA)A(pA)tsin(dA)A(p)tsin(A)x(E =ω=ω= ∫∫∞+
∞−
∞+
∞−
)t(sindA)A(pA)t(sindA)A(p)t(sinA)x(E 2222222 ωσ=ω=ω= ∫∫∞+
∞−
∞+
∞−
Le moment d’ordre 2 n’est pas indépendant du temps. Le signal n’est donc pas stationnaire. Comparons ces moyennes statistiques aux moyennes temporelles évaluées sur un échantillon :
)x(E0dt)tsin(Ax ==ω= ∫∞+
∞−
)x(E2
Adt)t(sinAx 2
2222 ≠=ω= ∫
∞+
∞−
Le signal n’est pas ergodique.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 12
Calculons la fonction d’autocorrélation statistique :
∫ ∫∞+
∞−
∞+
∞−= 2122112121X dxdx)t,x;t,x(pxx)t,t(R
Comme nous avons :
)t(sinA)t(Xxet)t(sinA)t(Xx 222111 ω==ω== Nous pouvons écrire :
)t(sin)t(sindA)A(p)t(sinA)t(sinA)t,t(R 212
2121X ωωσ=ωω= ∫∞+
∞−
Ne dépend pas que de la différence t2 – t1.
C.3. Troisième exemple Considérons un signal aléatoire (courbe verte de la figure 10-7) défini de la manière suivante :
- constant sur chaque intervalle [tn, tn+1[ avec tn = θ + n ∆t ; - θ est aléatoire avec une densité de probabilité uniforme sur [0, ∆t[ ; - sur chaque intervalle l’amplitude aléatoire suit une distribution uniforme entre –1 et +1 ; - les amplitudes sont indépendantes d’un intervalle à un autre.
Calculons les moments statistiques d’ordre 1 et 2 :
02
dxxdx)x(px)]t(x[E
1
1=== ∫∫
+
−
∞+
∞−
3
1
2
dxxdx)x(px)]t(x[E
1
1
222 === ∫∫+
−
∞+
∞−
Nous vérifions ainsi que le signal est stationnaire d’ordre 2. Il est évident que les moments d’ordres supérieurs sont également indépendants du temps, il est donc stationnaire au sens strict. Calculons la valeur moyenne et la valeur efficace d’un échantillon.
∫∞→=
T
0Tdt)t(x
T
1limx
Comme le signal est constant sur chaque intervalle nous pouvons transformer l’intégrale en une somme discrète :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 13
tNTavectxdt)t(xN
0kk
T
0∆=∆=∑∫
= Nous avons donc pour la valeur moyenne :
∑=
∞→ +=
N
0kk
Nx
1N
1limx
Par définition cette limite correspond à la valeur moyenne de la variable aléatoire dont chaque xk est une réalisation. Donc :
)x(E0x1N
1limx
N
0kk
N==
+= ∑
=∞→
De même pour la variance nous avons :
)x(E3
1x
1N
1limdt)t(x
T
1limx 2
N
0k
2k
N
T
0
2
T
2 ==+
== ∑∫=
∞→∞→
Le signal est ergodique.
Fig. 10-7 : Visualisation d’un échantillon du signal aléatoire décrit en C.3. (unité de graduation de l’axe horizontal : ∆t).
Calculons la fonction d’autocorrélation statistique de ce signal stationnaire :
[ ])t(x)t(xE)(RX τ+=τ
Clairement si les instants sont séparés de plus de ∆t les variables aléatoires x(t) et x(t+τ) sont indépendantes, donc :
0)x(E)x(E)x(E)(Rt 221X ===τ⇒∆>τ

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 14
De manière générale nous avons :
nonsi)x(E)(R
tempsdetranchemêmeunedanstettsi)x(E)(R
2X
2X
=τ
τ+=τ
Pour τ positif le premier cas correspond à tn < t < tn+1-τ et pour τ négatif cela correspond à tn+τ < t < tn+1. Nous sommes donc dans le premier cas si t se trouve dans un intervalle de temps de largeur de ∆t-|τ|. Nous pouvons donc écrire :
t)x(E
t
t)x(E)t,t(R 22
21X ∆τ
+∆
τ−∆=
C’est-à-dire :
t
t)x(E)(R 2
X ∆τ−∆
=τ
Nous reconnaissons une fonction triangle :
∆τΛ=τt3
1)(RX
Fig. 10-8 : Fonction d’autocorrélation statistique du signal aléatoire décrit en C.3. Nous pouvons donc déterminer la densité spectrale du signal aléatoire :
( )
ννπ∆=ν∆π∆=
∆τΛ=ν
0
22X Sinc
3
ttSinc
3
t
tTF
3
1)(S
Dans le terme de droite nous avons fait apparaître la fréquence du signal :
t
10 ∆
=ν

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 15
Cette densité spectrale (Fig. 10-9) s’annule pour ν = k ν0 (k ≠ 0).
Fig. 10-9 : Densité spectrale du signal aléatoire décrit en C.3.
D. Couple de signaux aléatoires
D.1. Fonctions d’intercorrélation et d’intercovariance Une fonction d’intercorrélation de deux processus aléatoires X(t) et Y(t) est définie par :
[ ])t(Y)t(XE)t,t(R 2121XY = Soit :
∫ ∫∞+
∞−
∞+
∞−= 2122112121XY dydx)t,y;t,x(pyx)t,t(R
avec x1 = X(t1) et y2 = Y(t2). Pour des signaux stationnaires, la densité de probabilité du deuxième ordre ne dépend que de l’intervalle τ = t2 – t1. Il en est donc de même pour la fonction d’intercorrélation :
[ ] ∫ ∫∞+
∞−
∞+
∞−τ=τ+=τ 212121XY dydx),y,x(pyx)t(Y)t(XE)(R
Inversons les indices X et Y, il vient :
[ ])t(X)t(YE)(RYX τ+=τ Les signaux étant stationnaires, cette espérance mathématique est invariante sous une translation temporelle, par exemple t → t-τ :
[ ] [ ] [ ])t(Y)t(XE)t(X)t(YE)t(X)t(YE τ−=τ−=τ+ Donc :
)(R)(R XYYX τ−=τ

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 16
On définit une fonction d’intercovariance par :
)y(E)x(E)t,t(R)t,t(C 21XY21XY −= soit pour des signaux stationnaires :
)y(E)x(E)(R)(C XYXY −τ=τ L’inégalité de Cauchy-Schwartz permet de montrer que :
)0(C)0(C)(Cet)0(R)0(R)(R YXXYYXXY ≤τ≤τ
Deux signaux sont orthogonaux si :
0)(R)(R YXXY =τ=τ Deux signaux sont non corrélés si :
)y(E)x(E)t,t(R0)t,t(C)t,t( 21XY21XY21 =⇔=∀ La fonction d’intercovariance normalisée est définie par :
)0(C)0(C
)(C)(
YX
XYXY
τ=τρ
Elle est nulle lorsque les signaux sont décorrélés.
D.2. Somme de signaux aléatoires Considérons la somme de deux signaux aléatoires : Z(t) = X(t) + Y(t). Elle a pour fonction d’autocorrélation :
[ ][ ]{ })t(Y)t(X)t(Y)t(XE)(RZ τ++τ++=τ Soit en développant :
[ ] [ ] [ ] [ ])t(Y)t(YE)t(X)t(YE)t(Y)t(XE)t(X)t(XE)(RZ τ++τ++τ++τ+=τ
Ce qui nous donne :
)(R)(R)(R)(R)(R YYXXYXZ τ+τ+τ+τ=τ
L’espérance mathématique d’une somme étant égale à la somme des espérances, nous avons pour la fonction d’intercovariance :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 17
[ ]2Z2
ZZ )y(E)x(E)(R)z(E)(R)(C +−τ=−τ=τ Donc :
)(C)(C)(C)(C)(C YYXXYXZ τ+τ+τ+τ=τ Et si les deux signaux sont non corrélés :
)(C)(C)(C YXZ τ+τ=τ
D.3. Densités spectrales mutuelles Les fonctions de densité spectrale mutuelle sont définies par :
[ ][ ])(RTF)(S
)(RTF)(S
YXYX
XYXY
τ=ν
τ=ν
Elles vérifient :
)(S)(S *XYYX ν=ν
On peut montrer que :
)(S)(S)(S YX2
XY νν≤ν
D.4. Fonction de cohérence Par analogie avec la fonction d’intercovariance normalisée nous pouvons définir une fonction de cohérence par :
)(D)(D
)(D)(
YX
2XY
XY ννν
=νΓ
avec : [ ][ ]
[ ])(CTF)(D
)(CTF)(D
)(CTF)(D
XYXY
YY
XX
τ=ν
τ=ν
τ=ν
Lorsque la corrélation est maximum, X(t) = Y(t), nous avons :
1)(D)(D
)(D)(
XX
2XX
XX =νν
ν=νΓ
Lorsque les signaux sont décorrélés nous avons :
0)(0)(D0)(C XYXYXY =νΓ⇔=ν⇔=τ

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 18
E. Processus stochastiques remarquables
E.1. Processus gaussiens De nombreux processus dans la nature sont gaussiens, ou peuvent y être assimilés en première approximation. C’est en particulier le cas lorsqu’ils résultent de la superposition d’un grand nombre de phénomènes aléatoires indépendants (théorème de la limite centrale). Un processus stochastique X(t) est gaussien si pour toute partition t1, t2, …, tn le vecteur aléatoire [x(t1), x(t2), …, x(tn)] est gaussien. La fonction d’autocorrélation statistique s’écrit alors :
[ ] )t()t()t,t()t(µ)t(µ)t(x)t(xE)t,t(R 2121212121X σσρ+== Un processus gaussien est stationnaire si les valeurs moyennes et les covariances sont indépendantes du temps. On parle de bruit blanc gaussien si les variables aléatoires x(tk) sont mutuellement indépendantes. Le coefficient de corrélation ρ(t1, t2) est alors nul pour t1 ≠ t2 et vaut 1 sinon. Un bruit blanc gaussien a alors pour fonction d’autocorrélation statistique :
[ ] )(µ)t(x)t(xE)(R 22X τδσ+=τ+=τ
Ce qui nous donne pour sa densité spectrale de puissance :
22X )(µ)(S σ+νδ=ν
Un bruit blanc gaussien n’a pas de réalité physique car de puissance infinie. On définit un bruit gaussien à bande limitée. Par exemple :
νΠσ+νδ=ννB
)(µ)(S 22X
Ce qui donne pour les fonctions d’autocorrélation et d’autocovariance statistiques :
)B2(SincB2µ)(R 22X τπσ+=τ νν
)B2(SincB2)(C 2X τπσ=τ νν

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 19
E.2. Bruit blanc Un bruit blanc (par analogie avec la lumière visible) est un processus aléatoire stationnaire dont la fonction de densité spectrale est constante :
ν∀=ν A)(SX La fonction d’autocorrélation s’obtient en prenant la transformée de Fourier inverse :
)(A)(RX τδ=τ Donc x(t1) et x(t2) sont orthogonaux pour t1 ≠ t2. La puissance d’un tel processus étant infinie celui-ci n’est pas réalisable physiquement :
∞=νν∫∞+
∞−d)(SX
C’est pourquoi on définit le bruit blanc à bande limitée :
ν≤νν≤ν
ν≤ν≤ν≤=ν
21
21X
oupour0
0pourA)(S
avec ν1 et ν2 positifs. On note Bν = ν2 - ν1. Considérons deux cas selon que la borne inférieure est nulle ou non. Commençons par le cas illustré par la figure 10-10 correspondant à un spectre de type passe-bas avec : ν1 = 0 et ν2 = Bν. Calculons la fonction d’autocorrélation correspondante. Nous avons :
ν
ν
ν
ν
+
−
τυπ
−
τυπ
τπ=ν=τ ∫
B
B
2jB
B
2jX 2j
eAdeA)(R
τπτπ
=τπ
−=τ ντπ−τπ νν
2
)B2sin(A2
2j
eeA)(R
B2jB2j
X
Ce qui nous donne :
)B2(SincBA2)(RX τπ=τ νν
Cette fonction d’autocorrélation, illustrée sur la figure 10-11, s’annule pour :
0kavecB2
kkB20)(RX ≠=τ⇔π=τπ⇔=τ
νν

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 20
Fig. 10-10 : Densité spectrale d’un bruit blanc à bande passante limitée du type passe-bas
Fig. 10-11 : Fonction d’autocorrélation d’un bruit blanc à bande passante limitée du type passe-bas
Le second cas correspond à un spectre de type passe-bande avec : ν1 ≠ 0 (Fig. 10-12).
Fig. 10-12 : Densité spectrale d’un bruit blanc à bande passante limitée du type passe-bande

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 21
Calculons la fonction d’autorrélation correspondante, le domaine d’intégration couvre deux bandes :
∫∫ν
ν
τυπν−
ν−
τυπ ν+ν=τ2
1
1
2
deAdeA)(R 2j2jX
Soit : 2
1
1
2
2j
eA
2j
eA)(R
2j2j
X
ν
ν
τυπν−
ν−
τυπ
τπ+
τπ=τ
Ce qui nous donne :
τπ−+
τπ−=τ
τυπτυπτυπ−τυπ−
2j
eeA
2j
eeA)(R
1221 2j2j2j2j
X
Soit encore :
[ ])2sin()2sin(A
)(R 12X τνπ−τνπτπ
=τ
Exprimons les deux fréquences ν2 et ν1 en fonction de la fréquence centrale et de la largeur de la bande passante :
2avec
2
B
2
B
210
02
01ν+ν
=ν
+ν=ν
−ν=ν
ν
ν
Avec ces notations nous avons :
[ ]
τπ=β
τνπ=αβ+α−β+α
τπ=τ
νB
2
avec)sin()sin(A
)(R0
X
Ce qui donne :
)Bsin()2cos(A2
)sin()cos(A2
)(R 0X τπτνπτπ
=βατπ
=τ ν
Soit encore : )B(Sinc)2cos(BA2)(R 0X τπτνπ=τ νν
Cette fonction d’autocorrélation est présentée sur la figure suivante. Les courbes en pointillé correspondent aux enveloppes :
)B(SincBA2 τπ± νν
Cette fonction s’annule pour :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 22
000 2
k
4
10)2cos(
ν+
ν=τ⇔=τνπ
et :
0kavecB
k0)B(Sinc ≠=τ⇔=τπ
νν
Fig. 10-13 : Fonction d’autocorrélation d’un bruit blanc à bande passante limitée du type passe-bande
Remarque : Il est facile de vérifier qu’avec ν1 = 0 nous retrouvons le résultat obtenu directement pour un bruit blanc à bande limitée de type passe-bas. En effet :
)B(Sinc)Bcos(BA2)(R2
B0 X01 τπτπ=τ⇒=ν⇔=ν ννν
ν
Ce qui nous donne :
τπτπ
=τπ
τπτπ=τ
ν
νν
ν
ννν B
)B2sin(BA
B
)Bsin()Bcos(2BA)(RX
Donc : )B2(SincBA2)(RX τπ=τ νν
E.3. Processus aléatoire à bande étroite Un processus stochastique qui peut s’écrire :
)tsin()t(A)tcos()t(A)t(X 0201 ω−ω=

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 23
où A1 et A2 sont des processus aléatoires stationnaires non corrélés suivant une même loi de probabilité d’espérance mathématique nulle et d’écart-type faible devant ω0 est un processus stochastique à bande étroite. Etudions la densité spectrale d’un tel processus. Commençons par la fonction d’autocorrélation statistique :
[ ]
[ ] [ ]
[ ] [ ]
[ ] [ ]
[ ] [ ])t(sin)tsin()t(a)t(aE
)t(cos)tsin()t(a)t(aE
)t(sin)tcos()t(a)t(aE
)t(cos)tcos()t(a)t(aE
)t(x)t(xE)(R
0022
0012
0021
0011
X
τ+ωωτ++
τ+ωωτ+−
τ+ωωτ+−
τ+ωωτ+=
τ+=τ
Comme A1 et A2 obéissent à la même loi de probabilité :
[ ] [ ] )(R)t(a)t(aE)t(a)t(aE A2211 τ=τ+=τ+ Comme A1 et A2 sont de moyenne nulle et non corrélés :
[ ] [ ] 0)t(a)t(aE)t(a)t(aE 1221 =τ+=τ+
Avec un peu de trigonométrie nous obtenons :
)cos()(R)(R 0AX τωτ=τ
Nous pouvons maintenant calculer la densité spectrale du processus :
[ ] [ ])cos(TF*)(S)(RTF)(S 0AXX των=τ=ν
Or :
[ ] [ ] 00000 2avec)()(2
1)cos(TF πν=ων+νδ+ν−νδ=τω
Donc :
[ ]∫∞+
∞−ν+−νδ+ν−−νδν=ν du)u()u()(S
2
1)(S 00AX
Soit :
[ ])(S)(S2
1)(S 0A0AX ν+ν+ν−ν=ν
L’allure de cette densité spectrale est présentée sur la figure suivante :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 24
Fig. 10-14 : Densité spectrale d’un processus à bande étroite Un processus aléatoire à bande étroite peut s’écrire sous une autre forme. Effectuons un changement de variables en introduisant deux variables aléatoires R et Φ telles que :
Φ=
Φ=
sinRA
cosRA
2
1
soit encore :
=Φ
+=
1
2
22
21
A
Atana
AAR
Nous avons alors :
[ ])t(tcos)t(R)t(X 0 Φ+ω=
R est appelé enveloppe et Φ phase, alors que A1 est la composante en phase et A2 la composante en quadrature. Supposons que ces composantes en phase et en quadrature suivent une loi normale de variance σ2. Elles décrivent alors un processus gaussien à bande étroite. A tout instant t, que nous oublions dans les expressions suivantes pour en alléger l’écriture, nous avons :
σ−
σπ=
σ−
σπ=
2
22
22
21
12
aexp
2
1)a(pet
2
aexp
2
1)a(p
Comme les deux variables sont indépendantes la densité conjointe est :
σ
+−
σπ=
2
22
21
2212
aaexp
2
1)a,a(p

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 25
Ce qui nous donne pour la densité conjointe des deux autres variables aléatoires :
ϕ
σ−
σπ=ϕϕ ddrr
2
rexp
2
1ddr),r(p
2
2
2
Celle-ci peut se factoriser. Les variables instantanées r et ϕ sont donc indépendantes et elles ont pour densités de probabilité :
[2,0[pour2
1)(p
0rpour2
rexp
r)r(p
2
2
2
π∈ϕπ
=ϕ
≥
σ−
σ=
La variable r suit une loi de Rayleigh et ϕ une distribution uniforme.
E.4. Processus Markoviens Un processus stochastique X(t) est markovien si pour toute partition croissante t1, t2, …, tn la densité de probabilité vérifie :
p[x(tn)=xn | x(tn-1)=xn-1, …, x(t1)=x1] = p[x(tn)=xn | x(tn-1)=xn-1] Toute l’information sur le passé est concentrée dans le dernier état observé. La probabilité conditionnelle p[x(tn)=xn | x(tn-1)=xn-1] est appelée densité de probabilité de transition. La formule de Bayes, qui permet d’exprimer la probabilité d’observer un événement A lorsque celui-ci connaît un nombre fini N de causes possibles :
∑=
=N
1i
)i(p)iA(p)A(p
peut se généraliser pour un processus markovien, en écrivant :
∫∞+
∞−== 00000 dx)t,x(p)x)t(xt,x(p)t,x(p
La connaissance de la densité de probabilité à un instant donné et de la densité de probabilité de transition caractérise totalement un processus markovien.

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 26
E.5. Marche aléatoire La marche aléatoire X(t) est un processus markovien à temps discret et à états discrets défini de la manière suivante : A chaque instant t = nT, la variable x(t) est augmentée ou diminuée avec une égale probabilité d’une quantité s, avec la condition initiale x(t = 0) = 0.
Nous avons donc :
∑=
=n
1iix)nT(x
où chaque variable xi peut prendre une des deux valeurs ±s avec une probabilité 1/2. Ces variables sont mutuellement non corrélées. Nous avons :
0)xx(Ej,iets)x(E,0)x(Ei ji22
ii =∀==∀
Nous pouvons donc calculer l’espérance et la moyenne quadratique de x(t). Nous avons :
[ ] [ ] 22 sn)nT(xEet0)nT(xE == Nous pouvons également calculer la densité de probabilité de cette variable aléatoire. Si à l’instant nT la variable a subi k incrémentations, et donc n-k décrémentations, elle a pour valeur :
s)nk2(s)kn(sk)nT(x −=−−=
La probabilité d’avoir x(nT) = ms est donc égale à la probabilité d’avoir k incrémentations avec :
2
mnk
+=
qui admet au plus une solution. Donc :
[ ]
[ ]
==
+===
nonsi0sm)nT(xP
existe2
mnksi
2
Csm)nT(xP
n
kn
E.6. Processus de Wiener Nous pouvons généraliser le processus discret de la marche aléatoire en un processus continu en remplaçant la somme discrète et le tirage entre deux valeurs par une intégration par rapport au temps d’un bruit blanc de moyenne nulle. Soit B(t) un bruit blanc de moyenne nulle, nous nous intéressons au signal X(t) défini comme :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 27
∫=t
0
du)u(B)t(X
avec
)()(R 2B τδσ=τ
Calculons l’espérance et la moyenne quadratique de ce signal.
[ ] [ ] 0du)u(bEdu)u(bE)t(xEt
0
t
0
==
= ∫∫
[ ] [ ]∫ ∫∫∫ =
=
t
0
t
0
t
0
t
0
2 dvdu)v(b)u(bEdv)v(bdu)u(bE)t(xE
En reconnaissant la fonction d’autocorrélation statistique du bruit blanc il vient :
[ ] ∫ ∫∫ ∫ −δσ=−=t
0
t
0
2t
0
t
0B
2 dvdu)vu(dvdu)vu(R)t(xE
Soit :
[ ] tdv)t(xE 2t
0
22 σ=σ= ∫
En résumé :
[ ] [ ] t)t(xEet0)t(xE 22 σ== Lorsque le bruit blanc est gaussien le processus stochastique X(t) ainsi construit par intégration est un processus de Wiener, qui permet de décrire le mouvement brownien. Calculons la fonction d’autocorrélation statistique de ce processus :
[ ] [ ]∫ ∫∫∫ =
==
1 221 t
0
t
0
t
0
t
02121X dvdu)v(b)u(bEdv)v(bdu)u(bE)t(x)t(xE)t,t(R
Donc :
∫ ∫ −δσ=1 2t
0
t
0
221X dvdu)vu()t,t(R
Si t1 ≤ t2, nous pouvons décomposer l’intégrale double sur deux domaines :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 28
∫ ∫∫ ∫∫ ∫ −δ+−δ=−δ1 2
1
1 11 2 t
0
t
t
t
0
t
0
t
0
t
0
dvdu)vu(dvdu)vu(dvdu)vu(
Le second terme est nul puisque nous avons u < v. Nous avons donc :
1
t
0
t
0
tdvdu)vu(1 2
=−δ∫ ∫
De même pour t2 ≤ t1 nous avons :
2
t
0
t
0
tdvdu)vu(1 2
=−δ∫ ∫
C’est-à-dire :
)t,tmin()t,t(R 212
21X σ= F. Filtrage linéaire des signaux aléatoires Considérons un système linéaire invariant soumis en entrée à un signal aléatoire. Le signal de sortie est également un signal aléatoire que nous cherchons à caractériser. Si le signal d’entrée est gaussien il en est de même pour le signal de sortie :
∫∞+
∞−−= du)ut(h)u(e)t(s
Nous savons en effet que la superposition de signaux gaussiens est gaussienne.
F.1. Description statistique du signal de sortie Pour les autres signaux nous cherchons à caractériser les propriétés statistiques des signaux de sortie à l’aide de leurs moments, variance et covariance. Pour un signal en entrée stationnaire nous avons :
∫∫∫∞+
∞−
∞+
∞−
∞+
∞−−=−=
−= du)ut(h)e(Edu)ut(h)u,e(Edu)ut(h)u(eE)t,s(E
Donc le moment d’ordre 1 ne dépend pas du temps :
)0(H)e(Edu)u(h)e(E)s(E == ∫∞+
∞−

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 29
où H(0) est le gain statique du filtre (en réponse à un signal d’entrée constant). Déterminons la fonction d’autocorrélation statistique du signal de sortie. En notant :
∫∫∞+
∞−
∞+
∞−−τ+=τ+−= dv)v(h)vt(e)t(setdu)u(h)ut(e)t(s
nous avons pour le produit :
∫ ∫∞+
∞−
∞+
∞−−τ+−=τ+ dvdu)v(h)u(h)vt(e)ut(e)t(s)t(s
Ce qui nous donne :
[ ] [ ]∫ ∫∞+
∞−
∞+
∞−−τ+−=τ+=τ dvdu)v(h)u(h)vt(e)ut(eE)t(s)t(sE)(RS
La fonction d’autocorrélation statistique du signal de sortie RS est donc reliée à la fonction d’autocorrélation statistique du signal d’entrée RE :
∫ ∫∞+
∞−
∞+
∞−−+τ=τ dvdu)v(h)u(h)uv(R)(R ES
Exprimons RE en fonction de la densité spectrale du signal d’entrée SE :
∫ ∫ ∫∞+
∞−
∞+
∞−
∞+
∞−
−+τνπ νν=τ dvdu)v(h)u(hde)(S)(R )uv(2jES
Soit :
∫ ∫ ∫∞+
∞−
∞+
∞−
∞+
∞−
νπνπ−τνπ νν=τ dvdue)v(he)u(hde)(S)(R v2ju2j2jES
L’intégration sur u donne :
)(Hdue)u(h u2j ν=∫∞+
∞−
νπ−
L’intégration sur v donne :
)(Hdve)v(h *v2j ν=∫∞+
∞−
νπ
Nous pouvons donc écrire :

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 30
∫∞+
∞−
τνπ ννν=τ de)(S)(H)(R 2jE
2S
En prenant la transformation de Fourier inverse il vient :
)(S)(H)(S E2
S νν=ν
Nous retrouvons un résultat similaire à celui obtenu pour les signaux déterministes. Pour la valeur quadratique moyenne du signal de sortie nous avons :
[ ] ∫∞+
∞−ννν== d)(S)(H)0(R)t(sE E
2S
2
Celle-ci est donc indépendante de t. Nous avons également :
[ ] ∫ ∫∞+
∞−
∞+
∞−−== dvdu)v(h)u(h)uv(R)0(R)t(sE ES
2
Pour un système causal nous avons aussi :
[ ] ∫ ∫∞+ ∞+
−=0 0
E2 dvdu)v(h)u(h)uv(R)t(sE
Effectuons un changement de variable en posant u = v-w, il vient :
[ ] ∫ ∫∞+
∞−
∞+
∞−−= dvdw)v(h)wv(h)w(RsE E
2
Ce qui écrit sous la forme :
[ ] dwdv)v(h)wv(h)w(RsE E2 ∫ ∫
∞+
∞−
∞+
∞−
−=
fait apparaître l’autocovariance temporelle de la réponse impulsionnelle du filtre Ch(t). Nous avons alors :
[ ] dt)t(C)t(RsE hE2 ∫
∞+
∞−=

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 31
F.2. Intercorrélation entrée-sortie Calculons l’intercorrélation statistique entre les signaux d’entrée et de sortie d’un filtre :
[ ])t(s)t(eE)(RES τ+=τ
Nous pouvons écrire :
[ ] ∫∫∞+
∞−
∞+
∞−−τ=−τ+=τ du)u(h)u(Rdu)u(h)ut(e)t(eE)(R EES
Soit : )(h*)(R)(R EES ττ=τ
Ce qui nous donne en prenant la transformée de Fourier :
)(S)(H)(S EES νν=ν
F.3. Bande équivalente de bruit Un filtre idéal est un système linéaire invariant dont la fonction de transfert harmonique est constante sur une certaine bande passante Bν et nulle ailleurs. Un filtre idéal est donc caractérisé par deux informations : son gain et sa bande passante. Par définition, le filtre idéal équivalent à un filtre réel a pour gain le gain maximum du filtre réel et sa bande passante est telle que si les deux filtres sont soumis à un même bruit blanc en entrée les valeurs moyennes quadratiques des signaux en sortie sont identiques. Considérons par exemple un filtre passe-bas réel caractérisé par sa fonction de transfert harmonique H(ν). Notons Hmax son gain maximum. Le filtre passe-bas idéal équivalent a donc une fonction de transfert harmonique de la forme :
>ν
≤ν=ν
ν
ν
Bpour0
BpourH)(H
max
Supposons les deux filtres soumis en entrée à un même bruit blanc décrit par sa densité spectrale de puissance :
2E )(S σ=ν
Calculons la moyenne quadratique du signal de sortie des deux filtres. Pour le filtre réel nous avons :
[ ] ∫∫∞+
∞−
∞+
∞−ννσ=ννν= d)(Hd)(S)(H)t(sE 22
E2
réel2

S. Tisserant – ESIL – Traitement du signal – 2009-2010 10 - 32
et pour le filtre idéal :
[ ] ν+
−
∞+
∞−σ=νσ=ννν= ∫∫
ν
ν
BH2dHd)(S)(H)t(sE 2max
2B
B
2max
2E
2idéal
2
La bande passante du filtre idéal doit être telle que ces deux valeurs quadratiques soient égales. Cela nous donne pour sa largeur :
∫∞+
∞−ν νν= d)(H
H2
1B 2
2max
Ce que le théorème de Parseval nous permet d’écrire sous la forme :
2max
h22max H2
)0(Cdt)t(h
H2
1B == ∫
∞+
∞−ν