Sharp thresholds for high-dimensional and noisy recovery of …jordan/sail/readings/... ·...
35
Sharp thresholds for high-dimensional and noisy recovery of sparsity using ℓ 1 -constrained quadratic programming Martin J. Wainwright Department of Statistics, and Department of Electrical Engineering and Computer Sciences, UC Berkeley, Berkeley, CA 94720 Abstract The problem of consistently estimating the sparsity pattern of a vector β * ∈ R p based on ob- servations contaminated by noise arises in various contexts, including signal denoising, sparse ap- proximation, compressed sensing, and model selection. We analyze the behavior of ℓ 1 -constrained quadratic programming (QP), also referred to as the Lasso, for recovering the sparsity pattern. Our main result is to establish precise conditions on the problem dimension p, the number k of non-zero elements in β * , and the number of observations n that are necessary and sufficient for subset selection using the Lasso. For a broad class of Gaussian ensembles satisfying mu- tual incoherence conditions, we establish existence and compute explicit values of thresholds 0 <θ ℓ ≤ 1 ≤ θ u < +∞ with the following properties: for any δ> 0, if n> 2(θ u + δ) k log(p − k), then the Lasso succeeds in recovering the sparsity pattern with probability converging to one for large problems, whereas for n< 2(θ ℓ − δ) k log(p − k), then the probability of successful recovery converges to zero. For the special case of the uniform Gaussian ensemble, we show that θ ℓ = θ u = 1, so that the precise threshold n =2 k log(p − k) is exactly determined. Keywords: Convex relaxation; ℓ 1 -constraints; sparse approximation; signal denoising; subset selection; compressed sensing; model selection; high-dimensional inference; thresholds. 1 1 Introduction The problem of recovering the sparsity pattern of an unknown vector β ∗ —that is, the positions of the non-zero entries of β ∗ — based on noisy observations arises in a broad variety of contexts, includ- ing subset selection in regression [27], compressed sensing [9, 4], structure estimation in graphical models [26], sparse approximation [8], and signal denoising [7]. A natural optimization-theoretic formulation of this problem is via ℓ 0 -minimization, where the ℓ 0 “norm” of a vector corresponds to the number of non-zero elements. Unfortunately, however, ℓ 0 -minimization problems are known to be NP-hard in general [28], so that the existence of polynomial-time algorithms is highly unlikely. This challenge motivates the use of computationally tractable approximations or relaxations to ℓ 0 minimization. In particular, a great deal of research over the past decade has studied the use of the ℓ 1 -norm as a computationally tractable surrogate to the ℓ 0 -norm. In more concrete terms, suppose that we wish to estimate an unknown but fixed vector β ∗ ∈ R p on the basis of a set of n observations of the form Y k = x T k β ∗ + W k , k =1,...n, (1) 1 This work was posted in June 2006 as Technical Report 709, Department of Statistics, UC Berkeley, and on arxiv.org as CS.IT/0605740. It was presented in part at the Allerton Conference on Control, Communication and Computing in September 2006. 1
Transcript of Sharp thresholds for high-dimensional and noisy recovery of …jordan/sail/readings/... ·...

Sharp thresholds for high-dimensional and noisy recovery ofsparsity using ℓ1-constrained quadratic programming
Martin J. WainwrightDepartment of Statistics, and
Department of Electrical Engineering and Computer Sciences,UC Berkeley, Berkeley, CA 94720
Abstract
The problem of consistently estimating the sparsity pattern of a vector β∗ ∈ Rp based on ob-
servations contaminated by noise arises in various contexts, including signal denoising, sparse ap-proximation, compressed sensing, and model selection. We analyze the behavior of ℓ1-constrainedquadratic programming (QP), also referred to as the Lasso, for recovering the sparsity pattern.Our main result is to establish precise conditions on the problem dimension p, the number kof non-zero elements in β∗, and the number of observations n that are necessary and sufficientfor subset selection using the Lasso. For a broad class of Gaussian ensembles satisfying mu-tual incoherence conditions, we establish existence and compute explicit values of thresholds0 < θℓ ≤ 1 ≤ θu < +∞ with the following properties: for any δ > 0, if n > 2 (θu + δ) k log(p− k),then the Lasso succeeds in recovering the sparsity pattern with probability converging to onefor large problems, whereas for n < 2 (θℓ − δ) k log(p − k), then the probability of successfulrecovery converges to zero. For the special case of the uniform Gaussian ensemble, we show thatθℓ = θu = 1, so that the precise threshold n = 2 k log(p − k) is exactly determined.
Keywords: Convex relaxation; ℓ1-constraints; sparse approximation; signal denoising; subsetselection; compressed sensing; model selection; high-dimensional inference; thresholds.1
1 Introduction
The problem of recovering the sparsity pattern of an unknown vector β∗—that is, the positions of
the non-zero entries of β∗— based on noisy observations arises in a broad variety of contexts, includ-
ing subset selection in regression [27], compressed sensing [9, 4], structure estimation in graphical
models [26], sparse approximation [8], and signal denoising [7]. A natural optimization-theoretic
formulation of this problem is via ℓ0-minimization, where the ℓ0 “norm” of a vector corresponds to
the number of non-zero elements. Unfortunately, however, ℓ0-minimization problems are known to
be NP-hard in general [28], so that the existence of polynomial-time algorithms is highly unlikely.
This challenge motivates the use of computationally tractable approximations or relaxations to ℓ0
minimization. In particular, a great deal of research over the past decade has studied the use of the
ℓ1-norm as a computationally tractable surrogate to the ℓ0-norm.
In more concrete terms, suppose that we wish to estimate an unknown but fixed vector β∗ ∈ Rp
on the basis of a set of n observations of the form
Yk = xTk β∗ + Wk, k = 1, . . . n, (1)
1This work was posted in June 2006 as Technical Report 709, Department of Statistics, UC Berkeley, and onarxiv.org as CS.IT/0605740. It was presented in part at the Allerton Conference on Control, Communication andComputing in September 2006.
1

where xk ∈ Rp, and Wk ∼ N(0, σ2) is additive Gaussian noise. In many settings, it is natural to
assume that the vector β∗ is sparse, in that its support
S := i ∈ 1, . . . p | β∗i 6= 0 (2)
has relatively small cardinality k = |S|. Given the observation model (1) and sparsity assumption (2),
a reasonable approach to estimating β∗ is by solving the ℓ1-constrained quadratic program (QP),
known as the Lasso in the statistics literature [30], given by
minβ∈Rp
1
2n
n∑
k=1
‖Yk − xTk β‖2
2 + ρn‖β‖1
, (3)
where ρn > 0 is a regularization parameter. Equivalently, the convex program (3) can be reformulated
as the ℓ1-constrained quadratic program
minβ∈Rp
n∑
k=1
‖Yk − xTk β‖2
2, such that ‖β‖1 ≤ Cn (4)
where the regularization parameter ρn and constraint level Cn are in one-to-one correspondence via
Lagrangian duality. Of interest are conditions on the ambient dimension p, the sparsity index k,
and the number of observations n for which it is possible (or impossible) to recover the support set
S of β∗ using this type of ℓ1-constrained quadratic programming.
1.1 Overview of previous work
Recent years have witnessed a great deal of work on the use of ℓ1 constraints for subset selection
and/or estimation in the presence of sparsity constraints. Given this substantial literature, we
provide only a brief (and hence necessarily incomplete) overview here, with emphasis on previous
work most closely related to our results. In the noiseless version (σ2 = 0) of the linear observation
model (1), one can imagine estimating β∗ by solving the problem
minβ∈Rp
‖β‖1 subject to xTk β = Yk, k = 1, . . . , n. (5)
This problem is in fact a linear program (LP) in disguise, and corresponds to a method in signal
processing known as basis pursuit, pioneered by Chen et al. [7]. For the noiseless setting, the
interesting regime is the underdetermined setting (i.e., n < p). With contributions from a broad
range of researchers [3, 7, 15, 16, 25, 31], there is now a fairly complete understanding of the
conditions on deterministic vectors xk and sparsity indices k that ensure that the true solution β∗
can be recovered exactly using the LP relaxation (5).
Most closely related to the current paper—as we discuss in more detail in the sequel—are recent
2

results by Donoho [11], as well as Candes and Tao [4] that provide high probability results for random
ensembles. More specifically, as independently established by both sets of authors using different
methods, for uniform Gaussian ensembles (i.e., xk ∼ N(0, Ip)) with the ambient dimension p scaling
linearly in terms of the number of observations (i.e., p = γn, for some γ > 1), there exists a constant
α > 0 such that all sparsity patterns with k ≤ αp can be recovered with high probability. These
initial results have been sharpened in subsequent work by Donoho and Tanner [13], who show that
the basis pursuit LP (5) exhibits phase transition behavior, and provide precise information on the
location of the threshold. The results in this paper are similar in spirit but applicable to the case
of noisy observations: for a class of Gaussian measurement ensembles including the standard one
xk ∼ N(0, Ip) as a special case, we show that the Lasso quadratic program (3) also exhibits a phase
transition in its failure/success, and provide precise information on the location of the threshold.
There is also a substantial body of work focusing on the noisy setting (σ2 > 0), and the use of
quadratic programming techniques for sparsity recovery. The ℓ1-constrained quadratic program (3),
known as the Lasso in the statistics literature [30, 14], has been the focus of considerable research in
recent years. Knight and Fu [22] analyze the asymptotic behavior of the optimal solution, not only
for ℓ1 regularization but for ℓq-regularization with q ∈ (0, 2]. Other work focuses more specifically on
the recovery of sparse vectors in the high-dimensional setting. In contrast to the noiseless setting,
there are various error metrics that can be considered in the noisy case, including:
• various ℓp norms E‖β − β∗‖p, especially ℓ2 and ℓ1;
• some measurement of predictive power, such as the mean-squared error E[‖Yi − Yi‖22], where
Yi is the estimate based on β; and
• a model selection criterion, meaning the correct recovery of the subset S of non-zero indices.
One line of work has focused on the analysis of the Lasso and related convex programs for deter-
ministic measurement ensembles. Fuchs [17] investigates optimality conditions for the constrained
QP (3), and provides deterministic conditions, of the mutual incoherence form, under which a sparse
solution, which is known to be within ǫ of the observed values, can be recovered exactly. Among
a variety of other results, both Tropp [32] and Donoho et al. [12] also provide sufficient conditions
for the support of the optimal solution to the constrained QP (3) to be contained within the true
support of β∗. Also related to the current paper is recent work on the use of the Lasso for model
selection, both for random designs by Meinshausen and Buhlmann [26] and deterministic designs by
Zhao and Yu [35]. Both papers established that when suitable mutual incoherence conditions are
imposed on either random [26] or deterministic design matrices [35], then the Lasso can recover the
sparsity pattern with high probability for a specific regime of n, p and k. In this paper, we present
more general sufficient conditions for both deterministic and random designs, thus recovering these
previous scalings as special cases. In addition, we derive a set of necessary conditions for random
designs, which allow us to establish a threshold result for the Lasso. Another line of work has ana-
3

lyzed the use of the Lasso [3, 10], as well as other closely related convex relaxations (e.g., the Dantzig
selector [5]) when applied to random ensembles with measurement vectors drawn from the standard
Gaussian ensemble (xk ∼ N(0, Ip×p). These papers either provide conditions under which estimation
of a noise-contaminated signal via the Lasso is stable in the ℓ2 sense [3, 10], or bounds on the MSE
prediction error [5]. However, stability results of this nature do not guarantee exact recovery of the
underlying sparsity pattern, according to the model selection criterion that we consider in this paper.
1.2 Our contributions
Recall the linear observation model (1). For compactness in notation, let us use X to denote
the n × p matrix formed with the vectors xk = (xk1, xk2, . . . , xkp) ∈ Rp as rows, and the vectors
Xj = (x1j , x2j , . . . , xnj)T ∈ R
n as columns, as follows:
X :=
xT1
xT2...
xTn
=[X1 X2 · · · Xp
]. (6)
Consider the (random) set S(X, β∗, W, ρn) of optimal solutions to this constrained quadratic pro-
gram (3). By convexity and boundedness of the cost function, the solution set is always non-empty.
For any vector β ∈ Rp, we define the sign function
sgn(βi) :=
+1 if βi > 0
−1 if βi < 0
0 if βi = 0.
(7)
Of interest is the event that the Lasso solution set contains a vector that recovers the sparsity pattern
of the fixed underlying β∗.
Property R(X, β∗, W, ρn): There exists a solution β ∈ S(X, β∗, W, ρn) such that sgn(β) = sgn(β∗).
This analysis in this paper applies to high-dimensional setting, based on sequences of models
indexed by (p, k) whose dimension p = p(n) and sparsity level k = k(n) are allowed to grow with
the number of observations. In this paper, we allow for completely general scaling of the triplet
(n, p, k), so that the analysis applies to different sparsity regimes, including linear sparsity (k = αp
for some α > 0), as well as sublinear sparsity (meaning that k/p → 0). We begin by providing
sufficient conditions for Lasso-based recovery to succeed with high probability (over the observation
noise) when applied to deterministic designs. Moving to the case of random designs, we then sharpen
this analysis by proving thresholds in the success/failure probability of the Lasso for various classes
of Gaussian random measurement ensembles. In particular, for suitable measurement ensembles,
4
we prove that there exist fixed constants 0 < θℓ ≤ 1 and 1 ≤ θu < +∞ such that for all δ > 0,
the following properties hold. In terms of sufficiency, we show that it is always possible to choose
the regularization parameter ρn such that the Lasso recovers the sparsity pattern with probability
converging to one (over the choice of noise vector W and random matrix X) whenever
n > 2(θu + δ) k log(p − k). (8)
Conversely, for whatever regularization parameter ρn > 0 is chosen, the Lasso fails to recover with
probability converging to one whenever the number of observations n satisfies
n < 2(θℓ − δ) k log(p − k). (9)
Although negative results of this type have been established for the basis pursuit LP in the noiseless
setting [13], to the best of our knowledge, the condition (9) is the first result on necessary conditions
for exact sparsity recovery in the noisy setting.
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
Identity; Linear
n = 128n = 256n = 512
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
Identity; Sublinear
n = 128n = 256n = 512
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
Identity; Fractional power
n = 128n = 256n = 512
(a) (b) (c)
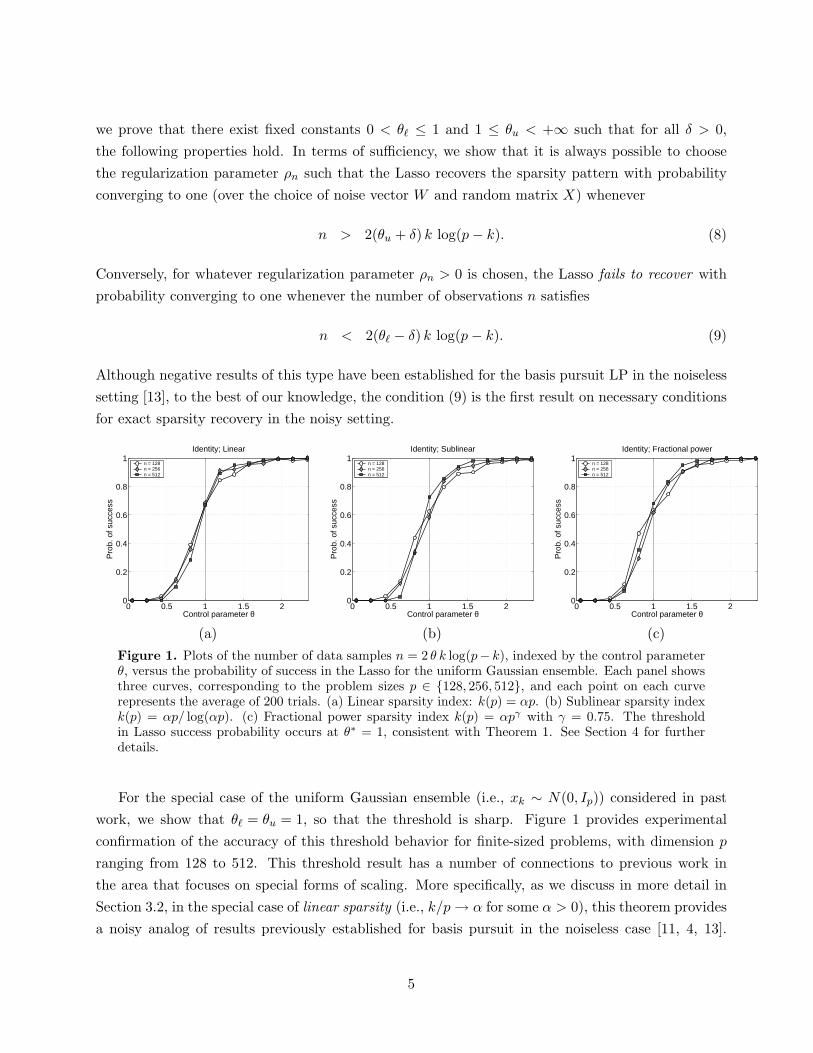
Figure 1. Plots of the number of data samples n = 2 θ k log(p− k), indexed by the control parameterθ, versus the probability of success in the Lasso for the uniform Gaussian ensemble. Each panel showsthree curves, corresponding to the problem sizes p ∈ 128, 256, 512, and each point on each curverepresents the average of 200 trials. (a) Linear sparsity index: k(p) = αp. (b) Sublinear sparsity indexk(p) = αp/ log(αp). (c) Fractional power sparsity index k(p) = αpγ with γ = 0.75. The thresholdin Lasso success probability occurs at θ∗ = 1, consistent with Theorem 1. See Section 4 for furtherdetails.
For the special case of the uniform Gaussian ensemble (i.e., xk ∼ N(0, Ip)) considered in past
work, we show that θℓ = θu = 1, so that the threshold is sharp. Figure 1 provides experimental
confirmation of the accuracy of this threshold behavior for finite-sized problems, with dimension p
ranging from 128 to 512. This threshold result has a number of connections to previous work in
the area that focuses on special forms of scaling. More specifically, as we discuss in more detail in
Section 3.2, in the special case of linear sparsity (i.e., k/p → α for some α > 0), this theorem provides
a noisy analog of results previously established for basis pursuit in the noiseless case [11, 4, 13].
5

Moreover, our result can also be adapted to an entirely different scaling regime, in which the sparsity
index is sublinear (k/p → 0), as considered by a separate body of recent work [26, 35] on the high-
dimensional Lasso.
The remainder of this paper is organized as follows. We begin in Section 2 with some necessary
and sufficient conditions, based on standard optimality conditions for convex programs, for property
R(X, β∗, W, ρn) to hold. We then prove a consistency result for the case of deterministic design
matrices X. Section 3 is devoted to the statement and proof of our main result on the asymptotic
behavior of the Lasso for random Gaussian ensembles. We illustrate this result via simulation in
Section 4, and conclude with a discussion in Section 5.
2 Preliminary analysis and deterministic designs
In this section, we provide necessary and sufficient conditions for Lasso to successfully recover the
sparsity pattern—or in shorthand, for property R(X, β∗, W, ρn) to hold. Based on these conditions,
we then define collections of random variables that play a central role in our analysis. In particular,
characterizing the event R(X, β∗, W, ρn) is reduced to studying the extreme order statistics of these
random variables. We then state and prove a result about the behavior of the Lasso for the case of
a deterministic design matrix X.
2.1 Convex optimality conditions
We begin with a simple set of necessary and sufficient conditions for property R(X, β∗, W, ρn) to
hold, which follow in a straightforward manner from optimality conditions for convex programs [20].
We define S := i ∈ 1, . . . , p | β∗i 6= 0 to be the support of β∗, and let Sc be its complement. For
any subset T ⊆ 1, 2, . . . , p, let XT be the n × |T | matrix with the vectors Xi, i ∈ T as columns.
Lemma 1. Assume that the matrix XTS XS is invertible. Then, for any given regularization parameter
ρ > 0 and noise vector w ∈ Rn, property R(X, β∗, w, ρ) holds if and only if
∣∣∣∣XTScXS
(XT
S XS
)−1[
1
nXT
S w − ρ sgn(β∗S)
]− 1
nXT
Scw
∣∣∣∣ ≤ ρ, and (10a)
sgn
β∗
S +
(1
nXT
S XS
)−1 [ 1
nXT
S w − ρ sgn(β∗S)
]= sgn(β∗
S), (10b)
where both of these vector relations should be taken elementwise. Moreover, if inequality (10a) holds
strictly, then any solution β of the Lasso (3) satisfies sgn(β) = sgn(β∗).
See Appendix A for the proof of this claim. For shorthand, define ~b := sgn(β∗S), and denote by
ei ∈ Rs the vector with 1 in the ith position, and zeroes elsewhere. Motivated by Lemma 1, much of
our analysis is based on the collections of random variables, defined each index i ∈ S and j ∈ Sc as
6

follows:
Ui := eTi
(1
nXT
S XS
)−1 [ 1
nXT
S W − ρn~b
](11a)
Vj := XTj
XS
(XT
S XS
)−1ρn
~b −[XS
(XT
S XS
)−1XT
S − In×n
]W
n
. (11b)
From Lemma 1, the behavior of R(X, β∗, W, ρn) is determined by the behavior of maxj∈Sc |Vj | and
maxi∈S |Ui|. In particular, condition (10a) holds if and only if the event
E(V ) :=
maxj∈Sc
|Vj | ≤ ρn
(12)
holds. On the other hand, if we define M(β∗) := mini∈S |β∗i |, then the event
E(U) :=
maxi∈S
|Ui| ≤ M(β∗)
(13)
is sufficient to guarantee that condition (10b) holds. Consequently, our proofs are based on analyzing
the asymptotic probability of these two events.
2.2 Recovery of sparsity: deterministic design
We now show how Lemma 1 can be used to analyze the behavior of the Lasso for the special
case of a deterministic (non-random) design matrix X. To gain intuition for the conditions in the
theorem statement, it is helpful to consider the zero-noise condition w = 0, in which each observation
Yk = xTk β∗ is uncorrupted. In this case, the conditions of Lemma 1 reduce to
∣∣∣XTScXS
(XT
S XS
)−1sgn(β∗
S)∣∣∣ ≤ 1 (14a)
sgn
(β∗
S − ρ
(1
nXT
S XS
)−1
sgn(β∗S)
)= sgn(β∗
S). (14b)
If the conditions of Lemma 1 fail to hold in the zero-noise setting, then there is little hope of
succeeding in the presence of noise. These zero-noise conditions motivate imposing the following set
of conditions on the design matrix:
∥∥∥XTScXS
(XT
S XS
)−1∥∥∥∞
≤ (1 − ǫ) for some ǫ ∈ (0, 1], and (15a)
λmin(1
nXT
S XS) ≥ Cmin > 0, (15b)
where λmin denotes the minimal eigenvalue. Mutual incoherence conditions of the form (15a) have
been considered in previous work on the Lasso, initially by Fuchs [17] and Tropp [32]. Other au-
7

thors [26, 35] provide examples and results on matrix families that satisfy this type of condition.
With this set-up, we have the following set of sufficient conditions for sparsity recovery for
deterministic designs:
Proposition 1. For a fixed design matrix X, suppose that we observe Y = Xβ∗ + W , where the
W ∼ N(0, σ2I) is additive Gaussian noise, and the columns of X satisfy maxj ‖Xj‖2/n = Θ(1).
Assume that β∗ and X satisfy conditions (15), and define M(β∗) := mini∈S |β∗i |. If ρn → 0 is
chosen such that
(a) nρ2n → +∞, and (b) ρn ≥ 2
ǫ
√σ2 log(p − k)
nand (c)
ρn
√k
M(β∗)= O(1). (16)
There exists a fixed constant C > 0 such that the probability P[R(X, β∗, W, ρn)] of Lasso success in
model selection converges to one at rate exp(−Cnρ2n).
Remarks: (1) First, it is worthwhile to consider Proposition 1 in the classical setting, in which in
which the number of samples n tends to infinity, but the model dimension p, sparsity index k, and
minimum value M(β∗) = mini∈S |β∗i | do not depend on n. Hence, in addition to the condition (15),
the requirements reduce to ρn → 0 and nρ2n → +∞. This classical case is covered by previous work
on Lasso asymptotics [22]. (As a side-comment, our regularization parameter ρn is related to their
choice of λn via the relation ρn = λn/n.)
(2) Turning to the non-classical setting, Proposition 1 allows all three parameters (n, p, k) to
increase simultaneously. As discussed earlier, past work [26, 35] has considered particular types of
high-dimensional scaling. If we specialize Theorem 1 to a particular type of scaling considered in
past work [35], then we recover the following corollary:
Corollary 1. Suppose that p = O(exp(nc3)) and k = O(nc1), and moreover that M(β∗)2 > 1/n(1−c2)
with 0 < c1 + c3 < c2 < 1. If we set ρ2n = 1/n1−c4 for some c4 ∈ (c3, c2 − c1), then under the
conditions (15), the Lasso recovers the sparsity pattern with probability 1 − exp(−Cnc4).
Proof. We simply need to verify that the conditions of Proposition 1 are satisfied with these particular
choices. By construction, we have nρ2n = nc4 → +∞, so that condition (16)(a) holds. Similarly, we
have log(p−k)nρ2
n= O
(nc3/(nc4−1n)
)= O(nc3−c4) → 0 so that condition (16)(b) holds. Lastly, we have
ρ2nk
M(β∗)2= O
(nc4−1nc1n(1−c2)
)= O(nc4+c1−c2) → 0, so that condition (16)(c) holds.
The given scaling is interesting since it allows the model dimension p to be exponentially larger
than the number of observations (p ≫ n). On the other hand, it imposes a very strong sparsity
constraint. If we consider general scaling of (n, p, k), Proposition 1 suggests that having n on the
order of k log(p− k) is appropriate. In Section 3, we show that this type of scaling is both necessary
and sufficient for almost all matrices drawn from suitable Gaussian designs.
8

2.3 Proof of Proposition 1
Recall the events E(V ) and E(U) defined in equations (12) and (13) respectively. To establish
the claim, we must show that that P[E(V )c or E(U)c] → 0, where E(V )c and E(U)c denote the
complements of these events. By union bound, it suffices to show both P[E(V )c] and P[E(U)c]
converge to zero, or equivalently that P[E(V )] and P[E(U)] both converge to one.
Analysis of E(V ): We begin by establishing that P[E(V )] → 1. Recalling our shorthand~b := sgn(β∗)
and the definition (11b) of the random variables Vj , note that E(V ) holds holds if and onlyminj∈Sc Vj
ρn≥
−1 andmaxj∈Sc Vj
ρn≤ 1. Moreover, we note that each Vj is Gaussian with mean µj = E[Vj ] =
ρnXTj XS
(XT
S XS
)−1~b . Using condition (15a), we have |µj | ≤ (1−ǫ) ρn for all indices j = 1, . . . , (p − k),
from which we obtain that
maxj∈Sc Vj
ρn≤ (1 − ǫ) +
1
ρnmax
jVj , and
minj∈Sc Vj
ρn≥ −(1 − ǫ) +
1
ρnmin
jVj ,
where Vj := XTj
[In×n − XS
(XT
S XS
)−1XT
S
]Wn
are zero-mean (correlated) Gaussian variables. Hence,
in order to establish condition (10a) of Lemma 1, we need to show that
P
[1
ρnminj∈Sc
Vj < −ǫ, or1
ρnmaxj∈Sc
Vj > ǫ
]→ 0. (17)
By symmetry (see Lemma 11 from Appendix C), it suffices to show that P[maxj∈Sc |eVj |
ρn> ǫ] → 0.
Using Gaussian comparison results [24] (see Lemma 9 in Appendix B), we haveE[maxj∈Sc |eVj |]
ρn≤
3√
log(p−k)
ρnmaxj
√E[V 2
j ]. Straightforward computation yields that
maxj
E[V 2j ] = max
j
σ2
n2XT
j
[In×n − XS
(XT
S XS
)−1XT
S
]Xj
≤ σ2
n2max
j‖Xj‖2 ≤ σ2
n,
since the projection matrix ΠS := In×n −XS
(XT
S XS
)−1XT
S has maximum eigenvalue equal to one,
and maxj ‖Xj‖22 ≤ n by assumption. Consequently, we have established that
E[maxj∈Sc
|Vj |] ≤√
σ2 log(p − k)
n
(i)
≤ ǫ ρn
2, (18)
where inequality (i) follows from condition (16)(b). We conclude the proof by claiming that for all
δ > 0, we have
P
[maxj∈Sc
|Vj | > E[maxj∈Sc
|Vj |] + δ
]≤ exp(−nδ2 σ2
2). (19)
9

To establish this claim, define a function f : Rn → R by f(w) = maxj∈Sc
∣∣∣∣σ2 XTj
nΠSw
∣∣∣∣. Note that by
construction, for a standard normal vector W ∼ N(0, In×n), we have f(W )d= maxj∈Sc |Vj |. Conse-
quently, the claim (19) will follow from measure concentration for Lipschitz functions of Gaussian
variates [23], as long as we can suitably upper bound the ℓ2-Lipschitz constant ‖f‖Lip. By the
triangle and Cauchy-Schwarz inequalities, we have
f(w) − f(v) ≤ maxj∈Sc
∣∣∣∣∣σ2XT
j
nΠS(w − v)
∣∣∣∣∣ = σ2 maxj∈Sc
‖Xj‖2
n‖ΠS‖2 ‖w − v‖2 =
σ2
√n‖w − v‖2,
since ‖ΠS‖2 = 1 and maxj ‖Xj‖2 ≤ √n by assumption. Hence, we have established that ‖f‖Lip ≤ σ2√
n
so that the concentration (19) follows.
Finally, if we set δ = ǫρn
2 , then we are guaranteed that δ + E[maxj∈Sc |Vj |] ≤ ρnǫ, so that
P
[maxj∈Sc |Vj | > ǫρn
]≤ exp(−nρ2
n ǫ2σ2
4 ) follows form the bound (19). Consequently, condition 16(a)
in the theorem statement—namely, that nρ2n → +∞—suffices to ensure that P(E(V )) → 1 at rate
exp(−Cnρ2n) as claimed.
Analysis of E(U): We now show that P(E(U)) → 1. Beginning with the triangle inequality, we
upper bound maxi∈S |Ui| := ‖( 1nXT
S XS)−1[ 1nXT
S W − ρn sgn(β∗S)]‖∞ as
maxi∈S
|Ui| ≤∥∥∥∥(
1
nXT
S XS)−1 1
nXT
S W
∥∥∥∥∞
+
∥∥∥∥(1
nXT
S XS)−1
∥∥∥∥∞
ρn (20)
The second term in this expansion is a deterministic quantity, which we bound as follows
ρn
∥∥∥∥(1
nXT
S XS)−1
∥∥∥∥∞
≤ ρn
√k λmax
((1
nXT
S XS)−1
)=
ρn
√k
λmin
(1nXT
S XS
) ≤ ρn
√k
Cmin, (21)
where we have use condition (15b) in the final step.
Turning to the first term in the expansion (20), let ei denote the unit vector with one in po-
sition i and zeroes elsewhere. Now define, for each index i ∈ S, the Gaussian random variable
Zi := eTi ( 1
nXT
S XS)−1 1nXT
S W . Each such Zi is a zero-mean Gaussian; computing its variance yields
var(Zi) = σ2
neTi ( 1
nXT
S XS)−1ei ≤ σ2
Cminn. Hence, by a standard Gaussian comparison theorem [24]
(in particular, see Lemma 9 in Appendix B), we have
E[maxi∈S
|Zi|] = E
[∥∥∥∥(1
nXT
S XS)−1 1
nXT
S W
∥∥∥∥∞
]≤ 3
√σ2 log k
nCmin. (22)
Now putting together the pieces, recall the definition M(β∗) := mini∈S |β∗i |. From the decom-
position (20) and the bound (21), order to have maxi∈S |Ui| ≤ M(β∗), it suffices to have ρn
√k
CminM(β∗)
be bounded above by constant (condition (16)(c)), which we may take equal to 12 by rescaling ρn as
10

necessary. With this deterministic term bounded, it suffices to have P[maxi∈S |Zi| > M(β∗)2 ] converge
to zero. To bound this probability, we first claim that for any δ > 0
P
[maxi∈S
|Zi| > E[maxi∈S
|Zi|] + δ
]≤ exp(−nδ2 σ2Cmin
2). (23)
As in the previous argument, this follows from concentration of measure for Lipschitz functions for
Gaussian random vectors, since ‖eTi ( 1
nXT
S XS)−1 1nXT
S ‖2 ≤ 1Cmin
√n.
Using the bound (22) and condition (16)(c), we have
E[maxi∈S |Zi|]M(β∗)
≤ 3
√σ2 log k
Cminn[M(β∗)]2= O
(√log k
Cminnρ2nk
)= O
(√1
nρ2n
),
which converges to zero using condition (16)(a) from the theorem statement. Hence, we may assume
that E[maxi∈S |Zi|] ≤ M(β∗)4 for sufficiently large n, and then take δ = M(β∗)
4 in the bound (23) to
conclude that
P[E(U)c] ≤ P
[maxi∈S
|Zi| >M(β∗)
2
]≤ exp(−nM(β∗)2 σ2Cmin
8) = O
(exp(−D
nρ2n σ2Cmin
8)
),
for some finite constant D, where the final inequality follows since ρ2n = O(M(β∗)2) from condi-
tion (16)(c). Thus, we have shown that P[E(U)] → 1 at rate exp(−Dnρ2n) for a suitable constant
D > 0 as claimed.
3 Recovery of sparsity: random Gaussian ensembles
The previous section treated the case of a deterministic design X, which allowed for a relatively
straightforward analysis. We now turn to the more complex case of random design matrices X,
in which each row xk is chosen as an i.i.d. Gaussian random vector with covariance matrix Σ. In
this setting, we provide precise conditions that govern the success and failure of the Lasso over this
ensemble; more specifically, we provide explicit thresholds that provide a sharp description of the
failure/success of the Lasso as a function of (n, p, k). We begin by setting up and providing a precise
statement of the main result, and then discussing its connections to previous work. In the later part
of this section, we provide the proof.
11

3.1 Statement of main result
Consider a covariance matrix Σ with unit diagonal, and with its minimum and maximum eigenvalues
(denoted λmin and λmax respectively) bounded as
λmin(ΣSS) ≥ Cmin, and λmax(Σ) ≤ Cmax (24)
for constants Cmin > 0 and Cmax < +∞. Given a vector β∗ ∈ Rp, define its support S = i ∈
1, . . . , p | β∗i 6= 0, as well as the complement Sc of its support. Suppose that Σ and S satisfy the
conditions ‖(ΣSS)−1‖∞ ≤ Dmax for some Dmax < +∞, and
‖ΣScS(ΣSS)−1‖∞ ≤ (1 − ǫ) (25)
for some ǫ ∈ (0, 1]. The simplest example of a covariance matrix satisfying these conditions is the
identity Σ = Ip×p, for which we have Cmin = Cmax = Dmax = 1, and ǫ = 1. Another well-known
matrix family satisfying these conditions are Toeplitz matrices (see Appendix D for details).
Under these conditions, we consider the observation model
Yk = xTk β∗ + Wk, k = 1, . . . , n, (26)
where xk ∼ N(0, Σ) and Wk ∼ N(0, σ2) are independent Gaussian variables for k = 1, . . . , n.
Furthermore, we define M(β∗) := mini∈S |β∗i |, and the sparsity index k = |S|.
Theorem 1. Consider a sequence of covariance matrices Σ[p] and solution vectors β∗[p] satisfy-
ing conditions (24) and (25). Under the observation model (26), consider a sequence (n, p(n), k(n))
such that k, (n − k) and (p − k) tend to infinity. Define the constants
θℓ :=(√
Cmax −√
Cmax − 1Cmax
)2
Cmax (2 − ǫ)2≤ 1, and θu :=
Cmax
ǫ2Cmin≥ 1. (27)
Then for any fixed δ > 0, we have the following
(a) If n < 2(θℓ − δ) k log(p− k), then P[R(X, β∗, W, ρn)] → 0 for any monotonic sequence ρn > 0.
(b) Conversely, if n > 2(θu + δ) k log(p − k), and ρn → 0 is chosen such that
(i)nρ2
n
log(p − k)→ +∞, and (ii)
ρn
M(β∗)= O(1) (28)
then P[R(X, β∗, W, ρn)] → 1.
Remark: Suppose for simplicity that M(β∗) remains bounded away from 0. In this case, the require-
ments on ρn reduce to ρn → 0, and ρ2nn/ log(p−k) → +∞. One suitable choice is ρ2
n = log(k) log(p−k)n
,
12

with which we have
ρ2n =
(k log(p − k)
n
)log(k)
k= O
(log k
k
)→ 0,
and nρ2n
log(p−k) = log(k) → +∞. More generally, under the threshold scaling of (n, p, k) given, the
theorem allows the minimum value M(β∗) := mini∈S |β∗i | to decay towards zero at rate Ω(1/
√k)
but not faster.
3.2 Some consequences
To develop intuition for this result, we begin by stating certain special cases as corollaries, and
discussing connections to previous work.
3.2.1 Uniform Gaussian ensembles
First, we consider the special case of the uniform Gaussian ensemble, in which Σ = Ip×p. Previous
work [4, 11] has focused on the uniform Gaussian ensemble in the the noiseless (σ2 = 0) and
underdetermined setting (n = γp for some γ ∈ (0, 1)). Analyzing the asymptotic behavior of the
linear program (5) for recovering β∗, the basic result is that there exists some α > 0 such that all
sparsity patterns with k ≤ αp can be recovered with high probability.
Applying Theorem 1 to the noisy version of this problem, the uniform Gaussian ensemble means
that we can choose ǫ = 1, and Cmin = Cmax = 1, so that the threshold constants reduce
θℓ =(√
Cmax −√
Cmax − 1Cmax
)2
Cmax (2 − ǫ)2= 1 and θu =
Cmax
ǫ2Cmin= 1.
Consequently, Theorem 1 provides a sharp threshold for the behavior of the Lasso, in that fail-
ure/success is entirely determined by whether or not n > 2k log(p − k). Thus, if we consider the
linear scaling n = Θ(p) analyzed in previous work on the noiseless case [11, 4], we have:
Corollary 2 (Linearly underdetermined setting). Suppose that n = γp for some γ ∈ (0, 1). Then
(a) If k = αp for any α ∈ (0, 1), then P [R(X, β∗, W, ρn)] → 0 for any positive sequence ρn > 0.
(b) On the other hand, if k = O( plog p
), then P [R(X, β∗, W, ρn)] → 1 for any sequence ρn satis-
fying the conditions of Theorem 1(a).
Conversely, suppose that the size k of the support of β∗ scales linearly with the number of parameters
p. The following result describes the amount of data required for the ℓ1-constrained QP to recover
the sparsity pattern in the noisy setting (σ2 > 0):
13

Corollary 3 (Linear fraction support). Suppose that k = αp for some α ∈ (0, 1). Then we require
n > 2αp log[(1 − α) p] in order to obtain exact recovery with probability converging to one for large
problems.
These two corollaries establish that there is a significant difference between recovery using basis
pursuit (5) in the noiseless setting versus recovery using the Lasso (3) in the noisy setting. When the
amount of data n scales only linearly with ambient dimension p, then the presence of noise means
that the recoverable support size drops from a linear fraction (i.e., k = αp as in the work [11, 4]) to
a sublinear fraction (i.e., k = O( log pp
), as in Corollary 2).
Interestingly, an information-theoretic analysis of this sparsity recovery problem [33] shows that
the optimal decoder—namely, an oracle that can search exhaustively over all(pk
)subsets—can re-
cover linear sparsity (k = αp) with the number of observations scaling linearly in the problem size
(n = Θ(p)). This behavior, which contrasts dramatically with the Lasso threshold given in Theo-
rem 1, raises an interesting question as to whether there exist computationally tractable methods
for achieving this scaling.
3.2.2 Non-uniform Gaussian ensembles
We now consider more general (non-uniform) Gaussian ensembles that satisfy conditions (24) and (25).
As mentioned earlier, previous papers treat model selection with the high-dimensional Lasso, both
for deterministic designs [35] and random designs [26]. These authors assume eigenvalue and in-
coherence conditions analogous to (24) and (25); however, in contrast to the results given here,
they impose rather specific scaling conditions on the triplet (n, p, k). For instance, Meinshausen
and Buhlmann [26] assumed2 p(n) = O(nγ) for some γ > 0, k = O(nκ) for some κ ∈ (0, 1), and
M(β∗)2 ≥ Ω(1/n(1−ξ)) for some ξ ∈ (0, 1), whereas (for deterministic designs) Zhao and Yu [35]
allowed faster growth p = O(exp(nc3)). Here we show that a corollary of Theorem 1 yields the
success of Lasso under these particular scalings:
Corollary 4. Suppose that p = O(exp(nc3)) and k = O(nc1), and M(β∗)2 > Ω(1/n(1−c2)) with
0 < c1 + c3 < c2 < 1. Then the Lasso recovers the sparsity pattern with probability converging to
one, where the probability is taken over both the choice of random design X and noise vector W .
Proof. We need to verify that the conditions (28) hold under this particular choice of scaling. First,
note that under the given scaling, we have nk log(p−k) > Ω( n
nc1 nc3) → +∞, since c1 + c3 < 1. Thus,
if we set ρ2n = log(k) log(p−k)
n→ 0, we have nρ2
n
log(p−k) = log(k) → +∞, so that condition (28)(i) holds.
Secondly, we have
ρ2n
M(β∗)2< n1−c2
k log(p − k)
n
log(k)
k= O
(nc1nc3
nc2
)log(k)
k→ 0,
2Under these assumptions, the authors in fact established fast rates for Lasso success.
14

since c1 + c3 − c2 < 0, which shows that condition (28)(ii) holds strongly.
3.3 Proof of Theorem 1(b)
We now turn to the proof of part (b) of our main result. As with the proof of Proposition 1, the
proof is based on analyzing the collections of random variables Vj | j ∈ Sc and Ui | i ∈ S,as defined in equations (11a) and (11b) respectively. We begin with some preliminary results that
serve to set up the argument.
3.3.1 Some preliminary results
We first note that for k < n, the random Gaussian matrix XS will have rank k with probability
one, whence the matrix XTS XS is invertible with probability one. Accordingly, the necessary and
sufficient conditions of Lemma 1 are applicable. Our first lemma, proved in Appendix E.1, concerns
the behavior of the random vector V = (V1, . . . , V(p−k)), when conditioned on XS and W . Recalling
the shorthand notation ~b := sgn(β∗), we summarize in the following
Lemma 2. Conditioned on XS and W , the random vector (V | W, XS) is Gaussian. Its mean
vector is upper bounded as
|E[V | W, XS ]| ≤ ρn(1 − ǫ)1. (29)
Moreover, its conditional covariance takes the form
cov[V | W, XS ] = MnΣ(Sc |S) = Mn
[ΣScSc − ΣScS(ΣSS)−1ΣSSc
], (30)
where
Mn := ρ2n~b T (XT
S XS)−1~b +1
n2W T
[In×n − XS
(XT
S XS
)−1XT
S
]W (31)
is a random scaling factor.
The following lemma, proved in Appendix E.2, captures the behavior of the random scaling factor
Mn defined in equation (31):
Lemma 3. The random variable Mn has mean
E[Mn] =ρ2
n
n − k − 1~b T (ΣSS)−1~b +
σ2 (n − k)
n2. (32)
Moreover, it is concentrated: for any δ > 0, we have P[∣∣Mn − E[Mn]
∣∣ ≥ δE[Mn]]→ 0 as n → +∞.
15

3.3.2 Main argument
With these preliminary results in hand, we now turn to analysis of the collections of random variables
Ui, i ∈ S and Vj , j ∈ Sc.
Analysis of E(V ): We begin by analyzing the behavior of maxj∈Sc |Vj |. First, for a fixed but
arbitrary δ > 0, define the event T (δ) := |Mn − E[Mn]| ≥ δE[Mn]. By conditioning on T (δ) and
its complement [T (δ)]c, we have the upper bound
P[maxj∈Sc
|Vj | > ρn] ≤ P
[maxj∈Sc
|Vj | > ρn | [T (δ)]c]
+ P[T (δ)].
By the concentration statement in Lemma 3, we have P[T (δ)] → 0, so that it suffices to analyze
the first term. Set µj = E[Vj |XS ], and let Z be a zero-mean Gaussian vector with cov(Z) =
cov(V |XS , W ). We then have
maxj∈Sc
|Vj | = maxj∈Sc
|µj + Zj |
≤ (1 − ǫ)ρn + maxj∈Sc
|Zj |,
where we have used the triangle inequality, and the upper bound (29) on the mean. This inequality
establishes the inclusion of events maxj∈Sc |Zj | ≤ ǫρn ⊆ maxj∈Sc |Vj | ≤ ρn, thereby showing
that it suffices to prove that P[maxj∈Sc |Zj | > ǫρn | [T (δ)]c] → 0.
Note that conditioned on [T (δ)]c, the maximum value of Mn is M∗n := (1 + δ)E[Mn]. Since
Gaussian maxima increase with increasing variance, we have
P
[maxj∈Sc
|Zj | > ǫρn | [T (δ)]c]
≤ P
[maxj∈Sc
|Zj | > ǫρn
],
where Z is zero-mean Gaussian with covariance M∗n Σ(Sc|S).
Using Lemma 11, it suffices to show that P[maxj∈Sc Zj > ǫρn] converges to zero. Accordingly, we
complete this part of the proof via the following two lemmas, both of which are proved in Appendix E:
Lemma 4. Under the stated assumptions of the theorem, we have M∗n
ρ2n
→ 0 and
limn→+∞
1
ρnE[max
j∈ScZj ] ≤ ǫ.
Lemma 5. For any η > 0, we have
P
[maxj∈Sc
Zj > η + E[maxj∈Sc
Zj ]
]≤ exp
(− η2
2M∗n
). (33)
Lemma 4 implies that for all δ > 0, we have E[maxj∈Sc Zj ] ≤ (1 + δ2)ǫρn for all n sufficiently
16

large. Therefore, setting η = δ2ρnǫ in the bound (33), we have for fixed δ > 0 and n sufficiently large:
P
[maxj∈Sc
Zj > (1 + δ)ρnǫ
]≤ P
[maxj∈Sc
Zj >δ
2ρnǫ + E[max
j∈ScZj ]
]
≤ 2 exp
(−δ2ρ2
nǫ2
8M∗n
).
From Lemma 4, we have ρ2n/M∗
n → +∞, which implies that P[maxj∈Sc Zj > (1 + δ)ρnǫ] → 0 for all
δ > 0. By the arbitrariness of δ > 0, we thus have P[maxj∈Sc Zj ≤ ǫρn] → 1, thereby establishing
that property (10a) of Lemma 1 holds w.p. one asymptotically.
Analysis of E(U): Next we prove that maxi∈S |Ui| < M(β∗) := mini∈S |β∗i | with probability one
as n → +∞. Conditioned on XS , the only random component in Ui is the noise vector W . A
straightforward calculation yields that this conditioned RV is Gaussian, with mean and variance
Yi := E[Ui | XS ] = −ρneTi
(1
nXT
S XS
)−1~b ,
Y ′i := var[Ui | XS ] =
σ2
neTi
[1
nXT
S XS
]−1
ei,
respectively. The following lemma, proved in Appendix E.5, is key to our proof:
Lemma 6. (a) The random variables Yi and Y ′i have means
E[Yi] =−ρn n
n − k − 1eTi (ΣSS)−1~b , and E[Y ′
i ] =σ2
n − k − 1eTi (ΣSS)−1ei, (34)
respectively, which are bounded as
|E[Yi]| ≤ 2Dmaxnρn
n − k − 1, and
σ2
Cmax (n − k − 1)≤ E[Y ′
i ] ≤ σ2Dmax
n − k − 1. (35)
(b) Moreover, each pair (Yi, Y′i ) is concentrated, in that we have
P
[|Yi| ≥
6Dmaxnρn
n − k − 1, or |Y ′
i | ≥ 2E[Y ′i ]
]= O
(1
n − k
). (36)
We exploit this lemma as follows. First define the event
T (δ) :=k⋃
i=1
|Yi| ≥
6Dmaxnρn
n − k − 1, or |Y ′
i | ≥ 2E[Y ′i ]
.
By the union bound and Lemma 6(b), we have P[T (δ)] = O(k 1
n−k
)= O
(1
nk−1
)→ 0, since
17

nk→ +∞ as n → +∞ under the scaling n > Ω(k log(p − k)). For convenience in notation, for any
a ∈ R and b ∈ R+, we use Ui(a, b) to denote a Gaussian random variable with mean a and variance
b. Conditioning on the event T (δ) and its complement, we have
P[maxi∈S
|Ui| > M(β∗)] ≤ P[maxi∈S
|Ui| > M(β∗) | T (δ)c] + P[T (δ)]
≤ P[maxi∈S
|Ui(µ∗i , ν(i))| > M(β∗)] + O
(1
nk− 1
), (37)
where each Ui(µ∗i , M
∗i ) is Gaussian with mean µ∗
i := 6Dmaxρnn
n−k−1 and variance νi := 2E[Y ′i ]
respectively. In asserting the inequality (37), we have used the fact that the probability of the event
Ui > M(β∗) increases as the mean and variance of Ui increase. Continuing the argument assuming
the conditioning on T (δ)c, we have via
P[1
M(β∗)maxi∈S
|Ui(µ∗i , νi)| > 1] ≤ P
[1
M(β∗)maxi∈S
|Ui(0, νi)| > 1 − maxi∈S |µ∗i |
M(β∗)
]
(i)
≤ P
[1
M(β∗)maxi∈S
|Ui(0, νi)| > 1 − 2Dmaxnρn
(n − k − 1)M(β∗)
]
≤ P
[1
M(β∗)maxi∈S
|Ui(0, νi)| > 1 − 2Dmaxρn
M(β∗)
]
(ii)
≤ P
[1
M(β∗)maxi∈S
|Ui(0, νi)| >1
2
],
where inequality (i) uses the conditioning on T (δ)c and Lemma 6(b), and inequality (ii) uses condition
(b) on ρn in the theorem statement.
Next we use Markov’s inequality, the bound (35) on νi := 2E[Y ′i ], and Lemma 9 on Gaussian
maxima (see Appendix B) to obtain the upper bound
P
[1
M(β∗)maxi∈S
|Ui(0, νi)| >1
2
]≤ 2E[maxi∈S |Ui(0, M∗
i )|]M(β∗)
≤ 6
M(β∗)
√2σ2 Dmax log k
n − k − 1.
Finally, using condition (ii) in equation (28), we have log kM(β∗)2 (n−k−1)
≤ log kρ2
n (n−k−1)= O( log(p−k)
ρ2n n
),
which converges to zero from condition (28)(i) in the theorem statement.
3.4 Proof of Theorem 1(a)
We establish the claim by proving that under the stated conditions, maxj∈Sc |Vj | > ρn with prob-
ability one, for any positive sequence ρn > 0. We begin by writing Vj = E[Vj ] + Vj , where Vj is
18

zero-mean. Now
maxj∈Sc
|Vj | ≥ maxj∈Sc
|Vj | − maxj∈Sc
|E[Vj ]|(i)
≥ maxj∈Sc
|Vj | − (1 − ǫ)ρn,
where have used Lemma 2 in obtaining the lower bound (i). Consequently, the event maxj∈Sc |Vj | >
(2 − ǫ)ρn implies the event maxj∈Sc |Vj | > ρn, so that
P[maxj∈Sc
|Vj | > ρn] ≥ P[maxj∈Sc
|Vj | > (2 − ǫ) ρn].
From the preceding proof of Theorem 1(b), we know that conditioned on XS and W , the random
vector (V1, . . . , V(p−k)) is Gaussian with covariance of the form Mn [ΣScSc −ΣScS(ΣSS)−1ΣSSc ]; thus,
the zero-mean version (V1, . . . , V(p−k)) has the same covariance. Moreover, Lemma 3 guarantees
that the random scaling term Mn is concentrated. In particular, defining for any δ > 0 the event
T (δ) := |Mn − E[Mn]| ≥ δE[Mn], we have P[T (δ)] → 0, and the bound
P[maxj∈Sc
|Vj | > (2 − ǫ) ρn] ≥ (1 − P[T (δ)]) P
[maxj∈Sc
|Vj | > (2 − ǫ) ρn | T (δ)c
]
(ii)
≥ (1 − P[T (δ)]) P
[maxj∈Sc
|Zj(M∗n)| > (2 − ǫ) ρn
],
where each Zj ≡ Zj(M∗n) is the conditioned version of Vj with the scaling factor Mn fixed to
M∗n := (1 − δ)E[Mn]. (In inequality (ii) above, we used the fact that Gaussian tail probabilities
decrease as the variance decreases, and the fact that var(Vj) ≥ M∗n when conditioned on T (δ)c.)
Our proof proceeds by first analyzing the expected value, and then exploiting Gaussian concen-
tration of measure for Lipschitz functions. We summarize the key results in the following:
Lemma 7. Under the stated conditions, one of the following two conditions must hold:
(a) either ρ2n
M∗n→ +∞, and there exists some γ > 0 such that 1
ρnE[maxj∈Sc Zj ] ≥ (2− ǫ) [1 + γ] for
all sufficiently large n, or
(b) there exist constants α, γ > 0 such that M∗n
ρ2n
≤ α and 1ρn
E[maxj∈Sc Zj ] ≥ γ√
log (p − k) for all
sufficiently large n.
Lemma 8. For any η > 0, we have
P[maxj∈Sc
Zj(M∗n) < E[max
j∈ScZj(M
∗n)] − η] ≤ exp
(− η2
2M∗n
). (38)
Using these two lemmas, we complete the proof as follows. First, if condition (a) of Lemma 7
19

holds, then we set η = (2−ǫ) γρn
2 in equation (38) to obtain that
P[1
ρnmaxj∈Sc
Zj(M∗n) ≥ (2 − ǫ) (1 +
γ
2) ] ≥ 1 − exp
(−(2 − ǫ)2 γ2ρ2
n
8M∗n
).
This probability converges to 1 since ρ2n
M∗n→ +∞ from Lemma 7(a). On the other hand, if condition
(b) holds, then we use the bound 1ρn
E[maxj∈Sc Zj ] ≥ γ√
log (p − k) and set η =γρn
√log (p−k)
2 in
equation (38) to obtain
P[1
ρnmaxj∈Sc
Zj(M∗n) > 2 (2 − ǫ) ] ≥ P[
1
ρnmaxj∈Sc
Zj(M∗n) ≥ γ
√log (p − k)
2]
≥ 1 − exp
(−γ2ρ2
n log (p − k)
8M∗n
).
This probability also converges to 1 since ρ2n
M∗n≥ 1/α and log (p − k) → +∞. Thus, in either case,
we have shown that limn→+∞ P[ 1ρn
maxj∈Sc Zj(M∗n) > (2 − ǫ)] = 1, thereby completing the proof of
Theorem 1(a).
4 Illustrative simulations
In this section, we provide some simulations to confirm the threshold behavior predicted by Theo-
rem 1. We consider the following three types of sparsity indices:
(a) linear sparsity, meaning that k(p) = αp for some α ∈ (0, 1);
(b) sublinear sparsity, meaning that k(p) = αp/(log(αp)) for some α ∈ (0, 1), and
(c) fractional power sparsity, meaning that k(p) = αpγ for some α, γ ∈ (0, 1).
For all three types of sparsity indices, we investigate the success/failure of the Lasso in recovering
the sparsity pattern, where the number of observations scales as n = 2 θ k log(p − k) + k + 1. The
control parameter θ is varied in the interval (0, 2.4). For all results shown here, we fixed α = 0.40 for
all three ensembles, and set γ = 0.75 for the fractional power ensemble. We specified the parameter
vector β∗ by choosing the subset S randomly, and for each i ∈ S setting β∗i equal to +1 or −1 with
equal probability, and β∗j = 0 for all indices j /∈ S. In addition, we fixed the noise level σ = 0.5, and
the regularization parameter ρn =
√log(p−k) log(k)
nin all cases.
We begin by considering the uniform Gaussian ensemble, in which each row xk is chosen in an
i.i.d. manner from the multivariate N(0, Ip×p) distribution. Recall that for the uniform Gaussian
ensemble, the critical value is θu = θℓ = 1. Figure 1, displayed earlier in Section 1, plots the control
parameter θ versus the probability of success, for linear sparsity (a), sublinear sparsity pattern (b),
and fractional power sparsity (c), for three different problem sizes (p ∈ 128, 256, 512). Each point
20
represents the average of 200 trials. Note how the probability of success rises rapidly from 0 around
the predicted threshold point θ = 1, with the sharpness of the threshold increasing for larger problem
sizes.
We now consider a non-uniform Gaussian ensemble—in particular, one in which the covariance
matrices Σ are Toeplitz with the structure
Σ =
1 µ µ2 · · · µp−2 µp−1
µ 1 µ µ2 · · · µp−2
µ2 µ 1 µ · · · µp−3
......
......
......
µp−1 · · · µ3 µ2 µ 1
, (39)
for some µ ∈ (−1, +1). Moreover, the maximum and minimum eigenvalues (Cmin and Cmax) can
be computed using standard asymptotic results on Toeplitz matrix families [19]. Figure 2 shows
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
ρ = 0.10; Linear
n = 128n = 256n = 512
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
ρ = 0.10; Sublinear
n = 128n = 256n = 512
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Control parameter θ
Pro
b. o
f suc
cess
ρ = 0.10; Fractional power
n = 128n = 256n = 512
(a) (b) (c)
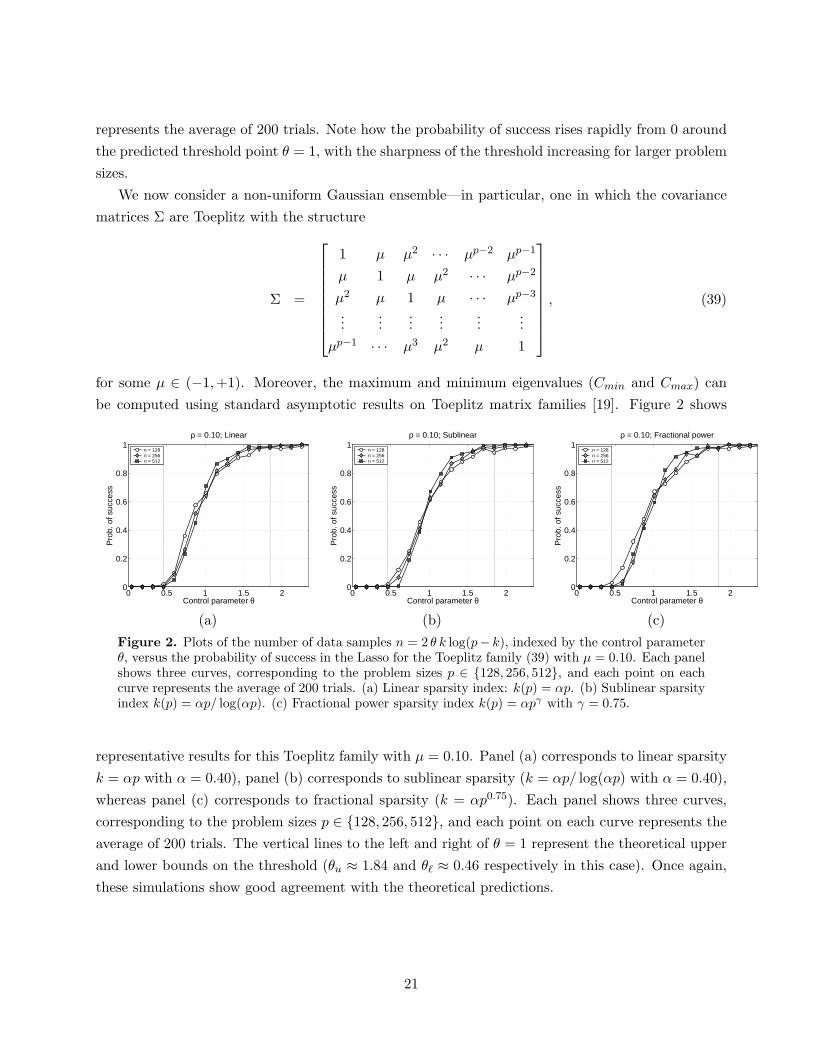
Figure 2. Plots of the number of data samples n = 2 θ k log(p− k), indexed by the control parameterθ, versus the probability of success in the Lasso for the Toeplitz family (39) with µ = 0.10. Each panelshows three curves, corresponding to the problem sizes p ∈ 128, 256, 512, and each point on eachcurve represents the average of 200 trials. (a) Linear sparsity index: k(p) = αp. (b) Sublinear sparsityindex k(p) = αp/ log(αp). (c) Fractional power sparsity index k(p) = αpγ with γ = 0.75.
representative results for this Toeplitz family with µ = 0.10. Panel (a) corresponds to linear sparsity
k = αp with α = 0.40), panel (b) corresponds to sublinear sparsity (k = αp/ log(αp) with α = 0.40),
whereas panel (c) corresponds to fractional sparsity (k = αp0.75). Each panel shows three curves,
corresponding to the problem sizes p ∈ 128, 256, 512, and each point on each curve represents the
average of 200 trials. The vertical lines to the left and right of θ = 1 represent the theoretical upper
and lower bounds on the threshold (θu ≈ 1.84 and θℓ ≈ 0.46 respectively in this case). Once again,
these simulations show good agreement with the theoretical predictions.
21

5 Discussion
The problem of recovering the sparsity pattern of a high-dimensional vector β∗ from noisy observa-
tions has important applications in signal denoising, compressed sensing, graphical model selection,
sparse approximation, and subset selection. This paper focuses on the behavior of ℓ1-regularized
quadratic programming, also known as the Lasso, for estimating such sparsity patterns in the noisy
and high-dimensional setting. We first analyzed the case of deterministic designs, and provided
sufficient conditions for exact sparsity recovery using the Lasso that allow for general scaling of
the number of observations n in terms of the model dimension p and sparsity index k. We then
turned to the case of random designs, with measurement vectors drawn randomly from certain
Gaussian ensembles. The main contribution in this setting was to establish a threshold of the or-
der n = Θ(k log(p − k)) governing the behavior of the Lasso: in particular, the Lasso succeeds
with probability (converging to) one above threshold, and conversely, it fails with probability one
below threshold. For the uniform Gaussian ensemble, our threshold result is exactly pinned down
to n = 2 k log(p − k) with matching lower and upper bounds, whereas for more general Gaussian
ensembles, it should be possible to tighten the constants in our analysis.
There are a number of interesting questions and open directions associated with the work de-
scribed here. Although the current work focused exclusively on linear regression, it is clear that
the ideas and analysis techniques apply to other log-linear models. Indeed, some of our follow-up
work [34] has established qualitatively similar results for the case of logistic regression, with applica-
tion to model selection in binary Markov random fields. Another interesting direction concerns the
gap between the performance of the Lasso, and the performance of the optimal (oracle) method for
selecting subsets. In this realm, information-theoretic analysis [33] shows that it is possible to recover
linear-sized sparsity patterns (k = αp) using only a linear fraction of observations (n = Θ(p)). This
type of scaling contrasts sharply with the order of the threshold n = Θ(k log(p− k)) that this paper
has established for the Lasso. It remains to determine if a computationally efficient method can
achieve or approach the information-theoretic limits in this regime of the triplet (n, p, k).
Acknowledgements
We would like to thank Peter Bickel, Alyson Fletcher, Noureddine El Karoui, Vivek Goyal, John
Lafferty, Larry Wasserman and Bin Yu for helpful comments and pointers. This work was partially
supported by an Alfred P. Sloan Foundation Fellowship and and NSF Grant DMS-0605165.
A Proof of Lemma 1
By standard conditions for optimality in a convex program [20], a point β ∈ Rp is optimal for the
regularized form of the Lasso (3) if and only if there exists a subgradient z ∈ ∂ℓ1(β) such that
22

1nXT Xβ − 1
nXT y + ρz = 0. Here the subdifferential of the ℓ1 norm takes the form
∂ℓ1(β) =
z ∈ Rp | zi = sgn(βi) for βi 6= 0, |zj | ≤ 1 otherwise
. (40)
Substituting our observation model y = Xβ∗ + w and re-arranging yields
1
nXT X(β − β∗) − 1
nXT w + ρz = 0. (41)
Now condition R(X, β∗, w, ρ) holds if and only if β satisfies βSc = 0 and βS 6= 0, and the subgradient
satisfies zS = sgn(β∗S) and |zSc | ≤ 1. From these conditions and using equation (41), we conclude
that the condition R(X, β∗, w, ρ) holds if and only if
1
nXT
ScXS
(βS − β∗
S
)− 1
nXT
Scw = −ρzSc .
1
nXT
S XS
(βS − β∗
S
)− 1
nXT
S w = −ρ sgn(β∗S).
Using the invertibility of XTS XS , we may solve for βS and zSc to conclude that
ρ zSc = XTScXS
(XT
S XS
)−1[
1
nXT
S w − ρ sgn(β∗S)
]− 1
nXT
Scw
βS = β∗S +
(1
nXT
S XS
)−1 [ 1
nXT
S w − ρ sgn(β∗S)
].
From these relations, the requirements |zSc | ≤ 1 and sgn(βS) = sgn(β∗S) yield conditions (10a)
and (10b) respectively. Lastly, note that if the vector inequality |zSc | < 1 holds strictly, then βSc = 0
for all solutions to the Lasso as claimed.
B Some Gaussian comparison results
We state here (without proof) some well-known comparison results on Gaussian maxima [24]. We
begin with a crude but useful bound:
Lemma 9. For any Gaussian RV (X1, . . . , Xn), E[ max1≤i≤n
|Xi|] ≤ 3√
log n max1≤i≤n
√EX2
i .
Next we state (a version of) the Sudakov-Fernique inequality [24]:
Lemma 10 (Sudakov-Fernique). Let X = (X1, . . . , Xn) and Y = (Y1, . . . , Yn) be Gaussian random
vectors such that for all i, j E[(Yi − Yj)2] ≤ E[(Xi − Xj)
2]. Then E[ max1≤i≤n
Yi] ≤ E[ max1≤i≤n
Xi].
C Auxiliary lemma
For future use, we state formally the following elementary
23

Lemma 11. Given a collection Z1, Z2, . . . , Z(p−k) of random variables with distribution symmetric
around zero, for any constant a > 0 we have
P[ max1≤j≤(p−k)
|Zj | ≤ a] ≤ P[ max1≤j≤(p−k)
Zj ≤ a], and (44a)
P[ max1≤j≤(p−k)
|Zj | > a] ≤ 2P[ max1≤j≤(p−k)
Zj > a]. (44b)
Proof. The first inequality is trivial. To establish the inequality (44b), we write
P[ max1≤j≤(p−k)
|Zj | > a] = P[( max1≤j≤(p−k)
Zj > a) or ( min1≤j≤(p−k)
Zj < −a)]
≤ P[ max1≤j≤(p−k)
Zj > a] + P[ min1≤j≤(p−k)
Zj < −a]
= 2P[ max1≤j≤(p−k)
Zj > a],
where we have used the union bound, and the symmetry of the events max1≤j≤(p−k) Zj > a and
min1≤j≤(p−k) Zj < −a.
D Toeplitz covariance matrices
In this appendix, we verify that Toeplitz covariance matrices satisfy the conditions of Theorem 1.
Standard results on Toeplitz matrices [19] show that the eigenvalues are suitably bounded. Previous
work [35] has shown that Toeplitz families satisfy the mutual incoherence condition (25). It remains
to verify the bound ‖(ΣSS)−1‖∞ ≤ Dmax. From the block matrix inversion formula [21], we have
(ΣSS)−1 = (Σ−1)SS − (Σ−1)SSc
[(Σ−1)ScSc
]−1(Σ−1)ScS . Applying the triangle inequality yields
‖(ΣSS)−1‖∞ ≤ ‖(Σ−1)SS‖∞ + ‖(Σ−1)SSc‖∞ ‖[(Σ−1)ScSc
]−1 ‖∞ ‖(Σ−1)ScS‖∞ (45)
For a Toeplitz matrix Σ = toep[1 µ . . . µp−1], the inverse is tridiagonal with bounded diagonal
entries ai(µ), immediate off-diagonals bij(µ), and all other entries equal to zero. Hence, it follows
immediately that the matrix norms ‖(Σ−1)SS |∞, ‖(Σ−1)SSc‖∞, and ‖(Σ−1)ScS‖∞ are all bounded
(independently of k and p). Finally, the matrix (Σ−1)ScSc is blockwise tridiagonal, with each block
corresponding to a subset of indices T ⊆ Sc all connected by single hops. Hence, the inverse matrix[(Σ−1)ScSc
]−1is a blockwise Toeplitz matrix. Each block can be interpreted as the covariance matrix
of a stable autoregressive process, so that the ℓ∞ norm of each row is bounded independently of p
and the choice of Sc. Thus, we conclude that ‖[(Σ−1)ScSc
]−1 ‖∞ is upper bounded independently
of p and Sc, and hence via equation (45) that the same holds for ‖(ΣSS)−1‖∞ as claimed.
24

E Lemma for Theorem 1
E.1 Proof of Lemma 2
Conditioned on both XS and W , the only random component in Vj is the column vector Xj . Using
standard LLSE formula [2] (i.e., for estimating XSc on the basis of XS), the random variable (XSc |XS , W ) ∼ (XSc | XS) is Gaussian with mean and covariance
E[XTSc | XS , W ] = ΣScS(ΣSS)−1XT
S , (46a)
var(XSc | XS) = Σ(Sc|S) = ΣScSc − ΣScS(ΣSS)−1ΣSSc . (46b)
Consequently, we have
|E[Vj | XS , W ]| =
∣∣∣∣∣ΣScS(ΣSS)−1XTS
XS
(XT
S XS
)−1ρn
~b −[XS
(XT
S XS
)−1XT
S − In×n
]W
n
∣∣∣∣∣
=∣∣∣ΣScS(ΣSS)−1ρn
~b∣∣∣ ≤ ρn(1 − ǫ)1,
as claimed.
Similarly, we compute the elements of the conditional covariance matrix as follows
cov(Vj , Vk
∣∣XS , W ) =
cov(Xji, Xki | XS , W )
ρ2
n~b T (XT
S XS)−1~b +1
n2W T
[In×n − XS
(XT
S XS
)−1XT
S
]W
.
E.2 Proof of Lemma 3
We begin by computing the expected value. Since XTS XS is Wishart with matrix ΣSS , the random
matrix (XTS XS)−1 is inverse Wishart with mean E[(XT
S XS)−1] = (ΣSS)−1
n−s−1 (see Lemma 7.7.1, [1]).
Hence we have
E
[ρ2
n~b T(XT
S XS
)−1~b]
=ρ2
n
n − s − 1~b T (ΣSS)−1~b . (47)
Now define the random matrix R = In×n − XS(XTS XS)−1XT
S . A straightforward calculation yields
that R2 = R, so that all the eigenvalues of R are either 0 or 1. In particular, for any vector z = XSu
in the range of XS , we have Rz =[In×n − XS(XT
S XS)−1XTS
]XSu = 0. Hence dim(ker R) =
dim(range XS) = s. Since R is symmetric and positive semidefinite, there exists an orthogonal
matrix U such that R = UT DU , where D is diagonal with (n − s) ones, and s zeros. The random
matrices D and U are both independent of W , since XS is independent of W . Hence we have
1
n2E[W T RW | XS
]=
1
n2E[W T UT DUW | XS
]
=1
n2trace
(DUUT
E[WW T | XS
])= σ2 n − k
n2, (48)
25

since E[WW T ] = σ2I. Consequently, we have established that E[Mn] = ρ2n
n−k−1~b T (ΣSS)−1~b + σ2 (n−k)
n2
as claimed.
We now compute the expected value of the squared variance
M2n = ρ4
n
[~b T(XT
S XS
)−1~b]2
︸ ︷︷ ︸+ 2
ρ2n
n2
[~b T(XT
S XS
)−1~b] (
W T RW)
︸ ︷︷ ︸+
1
n4
(W T RW
)2︸ ︷︷ ︸
T1 T2 T3
First, conditioning on XS and using the eigenvalue decomposition D of R, we have
E[T3|XS ] =1
n4E[(W T DW )2] =
1
n4E
[(n−k∑
i=1
Wi)2
]
=2(n − k)σ4
n4+
(n − k)2σ4
n4. (49)
whence E[T3] = 2(n−k)σ4
n4 + (n−k)2σ4
n4 as well.
Similarly, using conditional expectation and our previous calculation (48) of E[W T RW | XS ],
we have
E[T2] =2ρ2
n
n2E
[E
[~b T (XT
S XS)−1~b (W T RW ) | XS
]]
=2ρ2
n (n − k)σ2
n2E
[~b T (XT
S XS)−1~b]
=2ρ2
n (n − k)σ2
n2 (n − k − 1)~b T (ΣSS)−1~b , (50)
where the final step uses Lemma 7.7.1, [1] on inverse Wishart matrices.
Lastly, since (XTS XS)−1 is inverse Wishart with matrix (ΣSS)−1, we can use formula for second
moments of inverse Wishart matrices (see [29]) to write, for all n > k + 3,
E[T1] =ρ4
n
(n − k) (n − k − 3)
[~b T (ΣSS)−1~b
]21 +
1
n − k − 1
.
Consequently, combining our results, we have
var(Mn) = E[M2n] − (E[Mn])2
=3∑
i=1
E[Ti] −
σ4(n − k)2
n4+ 2
σ2(n − k)
n2
ρ2n
n − k − 1~b T (ΣSS)−1~b +
(ρ2
n
n − k − 1~b T (ΣSS)−1~b
)2
=2(n − k)σ4
n4︸ ︷︷ ︸+
ρ4n [~b T (ΣSS)−1~b ]2
(n − k − 1) (n − k − 3)
1
(n − k)+
n − k − 1
(n − k)− (n − k − 3)
(n − k − 1)
︸ ︷︷ ︸. (51)
H1 H2
26

Finally, we establish the concentration result. Using Chebyshev’s inequality, we have
P [|Mn − E[Mn]| ≥ δE[Mn]] ≤ var(Mn)
δ2(E[Mn])2,
so that it suffices to prove that var(Mn)/(E[Mn])2 → 0 as n → +∞. We deal with each of the two
variance terms H1 and H2 in equation (51) separately. First, we have
H1
(E[Mn])2≤ 2(n − k)σ4
n4
n4
(n − k)2σ4=
2
n − k→ 0.
Secondly, denoting A = (~b T (XTS XS)−1~b ) for short-hand, we have
H2
(E[Mn])2≤ (n − k − 1)2
ρ4nA2
ρ4nA2
(n − k − 1) (n − k − 3)
1
(n − k)+
n − k − 1
(n − k)− (n − k − 3)
(n − k − 1)
=(n − k − 1)
(n − k − 3)
1
(n − k)+
n − k − 1
(n − k)− (n − k − 3)
(n − k − 1)
,
which also converges to 0 as (n − k) → 0.
E.3 Proof of Lemma 4
Recall that the Gaussian random vector (Z1, . . . , Z(p−k)) is zero-mean with covariance M∗nΣ(Sc|S),
where Σ(Sc|S) := ΣScSc −ΣScS(ΣSS)−1ΣSSc . For any index i, let ei ∈ R(p−k) be equal to 1 in position
i, and zero otherwise. For any two indices i 6= j, we have
E[(Zi − Zj)2] = M∗
n(ei − ej)T Σ(Sc|S)(ei − ej)
≤ 2M∗nλmax(Σ(Sc|S)) ≤ 2CmaxM∗
n,
since Σ(Sc|S) ΣScSc by definition, and λmax(ΣScSc) ≤ λmax(Σ) ≤ Cmax.
Letting (X1, . . . , X(p−k)) ∼ N(0, CmaxM∗nI(p−k)×(p−k)), we have E[(Xi − Xj)
2] = 2CmaxM∗n.
Hence, applying the Sudakov-Fernique inequality (see Lemma 10) yields E[maxj Zj ] ≤ E[maxj Xj ].
From standard results on asymptotic behavior of Gaussian maxima [18], we have lim(p−k)→∞
E[maxj Xj ]√2CmaxM∗
n log (p−k)=
27

1. Consequently, for all δ′ > 0, there exists an N(δ′) such that for all (p − k) ≥ N(δ′), we have
1
ρnE[max
jZj(M
∗n)] ≤ 1
ρnE[max
jXj ]
≤ (1 + δ′)
√2CmaxM∗
n log (p − k)
ρ2n
= (1 + δ′)√
1 + δ
√2Cmax log (p − k)
n − k − 1~b T (ΣSS)−1~b +
2Cmaxσ2 (1 − kn) log (p − k)
nρ2n
≤ (1 + δ′)√
1 + δ
√2Cmax k log (p − k)
n − k − 1
1
Cmin+
2Cmaxσ2 log (p − k)
nρ2n
.
Now, using our assumption that n > 2(θu−ν)k log (p − k)−k−1 for some ν > 0, where θu = Cmax
ǫ2 Cmin,
we have
1
ρnE[max
jZj(M
∗n)] < (1 + δ′)
√1 + δ
√ǫ2(
1 − ν log (p − k)
n − k − 1
)+
2Cmaxσ2 log (p − k)
nρ2n
.
Recall that by assumption, as n, (p − k) → +∞, we have that log (p−k)nρ2
nand log (p−k)
n−k−1 converge to
zero. Consequently, the RHS converges to (1 + δ′)√
(1 + δ)ǫ as n, (p − k) → ∞. Hence, we have
limn→+∞ 1ρn
E[maxj Zj(M∗n)] < (1 + δ′)
√1 + δ ǫ. Since δ′ > 0 and δ > 0 were arbitrary, the result
follows.
E.4 Proof of Lemma 5
Consider the function f : R(p−k) → R given by f(w) :=
√M∗
n maxj∈Sc
[√Σ(Sc|S) w
], where Σ(Sc|S) :=
ΣScSc − ΣScS(ΣSS)−1ΣSSc . By construction, for a Gaussian random vector V ∼ N(0, I), we have
f(V )d= maxj∈Sc Zj .
We now bound the Lipschitz constant of f . Let R =√
Σ(Sc|S). For each w, v ∈ R(p−k) and index
j = 1, . . . , (p − k), we have
∣∣∣[√
M∗nRw]j − [
√M∗
nRv]j
∣∣∣ ≤√
M∗n
∣∣∣∣∣∑
k
Rjk[wk − vk]
∣∣∣∣∣
≤√
M∗n
√∑
k
R2jk ‖w − v‖2
≤√
M∗n‖w − v‖2,
where the last inequality follows since∑
k R2jk = [Σ(Sc|S)]jj ≤ 1. Therefore, by Gaussian concentra-
28

tion of measure for Lipschitz functions [23], we conclude that for any η > 0, it holds that
P[f(W ) ≥ E[f(W )] + η] ≤ exp
(− η2
2M∗n
), and P[f(W ) ≤ E[f(W )] − η] ≤ exp
(− η2
2M∗n
).
E.5 Proof of Lemma 6
Since the matrix XTS XS is Wishart with n degrees of freedom, using properties of the inverse Wishart
distribution, we have E[(XTS XS)−1] = (ΣSS)−1
n−k−1 (see Lemma 7.7.1, [1]). Thus, we compute
E[Yi] =−ρn n
n − k − 1eTi (ΣSS)−1~b , and
E[Y ′i ] =
σ2
n
n
n − k − 1eTi (ΣSS)−1ei =
σ2
n − k − 1eTi (ΣSS)−1ei.
Moreover, using formulae for second moments of inverse Wishart matrices (see, e.g., [29]), we compute
for all n > k + 3
E[Y 2i ] =
ρ2n n2
(n − k) (n − k − 3)
[(eTi (ΣSS)−1~b
)2+
1
n − k − 1
(~b T (ΣSS)−1~b
) (eTi (ΣSS)−1ei
)]
E[(Y ′i )2] =
σ4n2
(n − k − 1)2 (n − k) (n − k − 3)
(eTi (ΣSS)−1ei
)2[1 +
1
n − k − 1
].
We now compute and bound the variance of Yi. Setting Ai = eTi (ΣSS)−1~b and Bi = eT
i (ΣSS)−1~b
for shorthand, we have
var(Yi) =ρ2
n n2
(n − k) (n − k − 3)
[A2
i +1
n − k − 1AiBi
]− ρ2
n n2
(n − k − 1)2A2
i
=ρ2
nn2
(n − k) (n − k − 3)
[A2
i
(1 − (n − k) (n − k − 3)
(n − k − 1)2
)+
1
n − k − 1AiBi
]
≤ 2ρ2n
[3A2
i
n − k+
AiBi
n − k − 1
]
for n sufficiently large. Using the bound ‖(ΣSS)−1‖∞ ≤ Dmax, we see that the quantities Ai and
Bi are uniformly bounded for all i. Hence, we conclude that, for n sufficiently large, the variance is
bounded as
var(Yi) ≤ Kρ2n
n − k(54)
for some fixed constant K independent of k and n.
Now since |E[Yi]| ≤ 2Dmaxρnnn−k−1 , we have
|Yi − E[Yi]| ≥ |Yi| − |E[Yi]| ≥ |Yi| −2Dmaxρnn
n − k − 1.
29

Consequently, making use of Chebyshev’s inequality, we have
P[|Yi| ≥6Dmaxρnn
n − k − 1] = P[|Yi| −
2Dmaxρnn
n − k − 1≥ 4Dmaxρnn
n − k − 1]
≤ P[|Yi − E[Yi]| ≥4Dmaxρnn
n − k − 1]
≤ var(Yi)
16D2maxρ
2n
≤ K
16Dmax (n − k),
where the final step uses the bound (54). Next we compute and bound the variance of Y ′i . We have
var(Y ′i ) =
σ4n2
(n − k − 1)2 (n − k) (n − k − 3)
(A2
i
[1 +
1
n − k − 1
])− σ4
(n − k − 1)2A2
i
=σ4n2
(n − k − 1)2 (n − k) (n − k − 3)
(A2
i
[1 +
1
n − k − 1− (n − k) (n − k − 3)
n2
])
≤ Kσ4
(n − k − 1)3
for some constant K independent of k and n. Consequently, applying Chebyshev’s inequality, we
have
P[Y ′i ≥ 2E[Y ′
i ]] = P[Y ′i − E[Y ′
i ] ≥ E[Y ′i ]] ≤ var(Y ′
i )
(E[Y ′i ])2
≤ K
(n − k − 1)31
σ4
n2 eTi (ΣSS)−1ei
≤ Kn2Cmax
σ4(n − k − 1)3
≤ K ′
n − k − 1
for some constant K ′ independent of k and n.
E.6 Proof of Lemma 7
As in the proof of Lemma 4, we define and bound
∆Z(i, j) := E[(Zi − Zj)2] ≤ 2CmaxM∗
n.
Now let (X1, . . . , X(p−k)) be an i.i.d. zero-mean Gaussian vector with var(Xi) = CmaxM∗n, so that
∆X(i, j) := E[(Xi − Xj)2] = 2CmaxM∗
n. If we set
∆∗ := maxi,j∈Sc
|∆X(i, j) − ∆Z(i, j)| ,
30

then, by applying a known error bound for the Sudakov-Fernique inequality [6], we are guaranteed
that
E[maxj∈Sc
Zj ] ≥ E[maxj∈Sc
Xj ] −√
∆∗ log (p − k). (55)
We now show that the quantity ∆∗ is upper bounded as ∆∗ ≤ 2M∗n (Cmax − 1
Cmax). Using the
inversion formula for block-partitioned matrices [21], we have
Σ(Sc|S) := ΣScSc − ΣScS(ΣSS)−1ΣSSc =[Σ−1
]ScSc .
Consequently, we have the lower bound
E[(Zi − Zj)2] = M∗
n(ei − ej)T Σ(Sc|S)(ei − ej)
≥ 2M∗nλmin(Σ(Sc|S))
≥ 2M∗nλmin(Σ−1)
=2M∗
n
Cmax.
In turn, this leads to the upper bound
∆∗ = maxi,j∈Sc
|∆X(i, j) − ∆Z(i, j)| = maxi,j∈Sc
[2M∗nCmax − ∆Z(i, j)]
≤ 2M∗n
(Cmax − 1
Cmax
).
We now analyze the behavior of E[maxj∈Sc Xj ]. Using asymptotic results on the extrema of i.i.d.
Gaussian sequences [18], we have lim(p−k)→+∞E[maxj∈Sc Xj ]√
2CmaxM∗n log (p−k)
= 1. Consequently, for all δ′ > 0,
there exists an (p − k)(δ′) such that for all (p − k) ≥ (p − k)(δ′), we have
E[maxj∈Sc
Xj ] ≥ (1 − δ′)√
2CmaxM∗n log (p − k).
Applying this lower bound to the bound (55), we have
1
ρnE[max
j∈ScZj ] ≥ 1
ρn
[(1 − δ′)
√2CmaxM∗
n log (p − k) −√
∆∗ log (p − k)]
≥ 1
ρn
[(1 − δ′)
√2CmaxM∗
n log (p − k) −√
2 M∗n (Cmax − 1
Cmax) log (p − k)
]
=
[(1 − δ′)
√Cmax −
√Cmax − 1
Cmax
] √2M∗
n
ρ2n
log (p − k). (56)
31

First, assume that ρ2n/M∗
n does not diverge to infinity. Then, there exists some α > 0 such thatρ2
n
M∗n≤ α for all sufficiently large n. In this case, we have from the bound (56) that
1
ρnE[max
j∈ScZj ] ≥ γ
√log (p − k)
where γ :=[(1 − δ′)
√Cmax −
√Cmax − 1
Cmax
]1√α
> 0. (Note that by choosing δ′ > 0 sufficiently
small, we can always guarantee that γ > 0, since Cmax ≥ 1.) This completes the proof of condition
(b) in the lemma statement.
Otherwise, we may assume that ρ2n/M∗
n → +∞. We compute
1
ρn
√2M∗
n log (p − k) =√
1 − δ
√2 log (p − k)
n − k − 1~b T (ΣSS)−1~b +
2σ2 (1 − sn) log (p − k)
nρ2n
≥√
1 − δ
√2 log (p − k)
n − k − 1~b T (ΣSS)−1~b
≥√
1 − δ
Cmax
√2k log (p − k)
n − k − 1.
We now apply the condition
2k log (p − k)
n − k − 1>
1
θℓ − ν= Cmax (2 − ǫ)2/
[[√Cmax −
√Cmax − 1
Cmax
]2
− νCmax(2 − ǫ)2
]
to obtain that
1
ρnE[max
j∈ScZj ] ≥
√(1 − δ)
(1 − δ′)√
Cmax −√
Cmax − 1Cmax√[√
Cmax −√
Cmax − 1Cmax
]2− νCmax (2 − ǫ)2
(2 − ǫ) (57)
Recall that νCmax (2− ǫ)2 > 0 is fixed, and moreover that δ, δ′ > 0 are arbitrary. Let F (δ, δ′) be
the lower bound on the RHS (57). Note that F is a continuous function, and moreover that
F (0, 0) =
√Cmax −
√Cmax − 1
Cmax√[√Cmax −
√Cmax − 1
Cmax
]2− νCmax (2 − ǫ)2
(2 − ǫ) > (2 − ǫ).
Therefore, by the continuity of F , we can choose δ, δ′ > 0 sufficiently small to ensure that for some
γ > 0, we have 1ρn
E[maxj∈Sc Zj ] ≥ (2 − ǫ) (1 + γ) for all sufficiently large n.
E.7 Proof of Lemma 8
This claim follows from the proof of Lemma 5.
32

References
[1] T. W. Anderson. An Introduction to Multivariate Statistical Analysis. Wiley Series in Probabilityand Mathematical Statistics. Wiley, New York, 1984.
[2] P. J. Bickel and K. A. Doksum. Mathematical statistics: basic ideas and selected topics. PrenticeHall, Upper Saddle River, N.J., 2001.
[3] E. Candes, J. Romberg, and T. Tao. Robust uncertainty principles: exact signal reconstructionfrom highly incomplete frequency information. Technical report, Caltech, 2004.
[4] E. Candes and T. Tao. Decoding by linear programming. IEEE Trans. Info Theory, 51(12):4203–4215, December 2005.
[5] E. Candes and T. Tao. The Dantzig selector: Statistical estimation when p is much larger thann. Annals of Statistics, 2006.
[6] S. Chatterjee. An error bound in the Sudakov-Fernique inequality. Technical report, UC Berke-ley, October 2005. arXiv:math.PR/0510424.
[7] S. Chen, D. L. Donoho, and M. A. Saunders. Atomic decomposition by basis pursuit. SIAM J.Sci. Computing, 20(1):33–61, 1998.
[8] R. A. DeVore and G. G. Lorentz. Constructive Approximation. Springer-Verlag, New York,NY, 1993.
[9] D. Donoho. Compressed sensing. IEEE Trans. Info. Theory, 52(4):1289–1306, April 2006.
[10] D. Donoho. For most large underdetermined systems of linear equations, the minimal ℓ1-normnear-solution approximates the sparsest near-solution. Communications on Pure and AppliedMathematics, 59(7):907–934, July 2006.
[11] D. Donoho. For most large underdetermined systems of linear equations, the minimal ℓ1-normsolution is also the sparsest solution. Communications on Pure and Applied Mathematics,59(6):797–829, June 2006.
[12] D. Donoho, M. Elad, and V. M. Temlyakov. Stable recovery of sparse overcomplete representa-tions in the presence of noise. IEEE Trans. Info Theory, 52(1):6–18, January 2006.
[13] D. L. Donoho and J. M. Tanner. Counting faces of randomly-projected polytopes when theprojection radically lowers dimension. Technical report, Stanford University, 2006. Submittedto Journal of the AMS.
[14] B. Efron, T. Hastie, I. Johnstone, and R. Tibshirani. Least angle regression. Annals of Statistics,32(2):407–499, 2004.
[15] M. Elad and A. M. Bruckstein. A generalized uncertainty principle and sparse representationin pairs of bases. IEEE Trans. Info Theory, 48(9):2558–2567, September 2002.
[16] A. Feuer and A. Nemirovski. On sparse representation in pairs of bases. IEEE Trans. InfoTheory, 49(6):1579–1581, 2003.
33
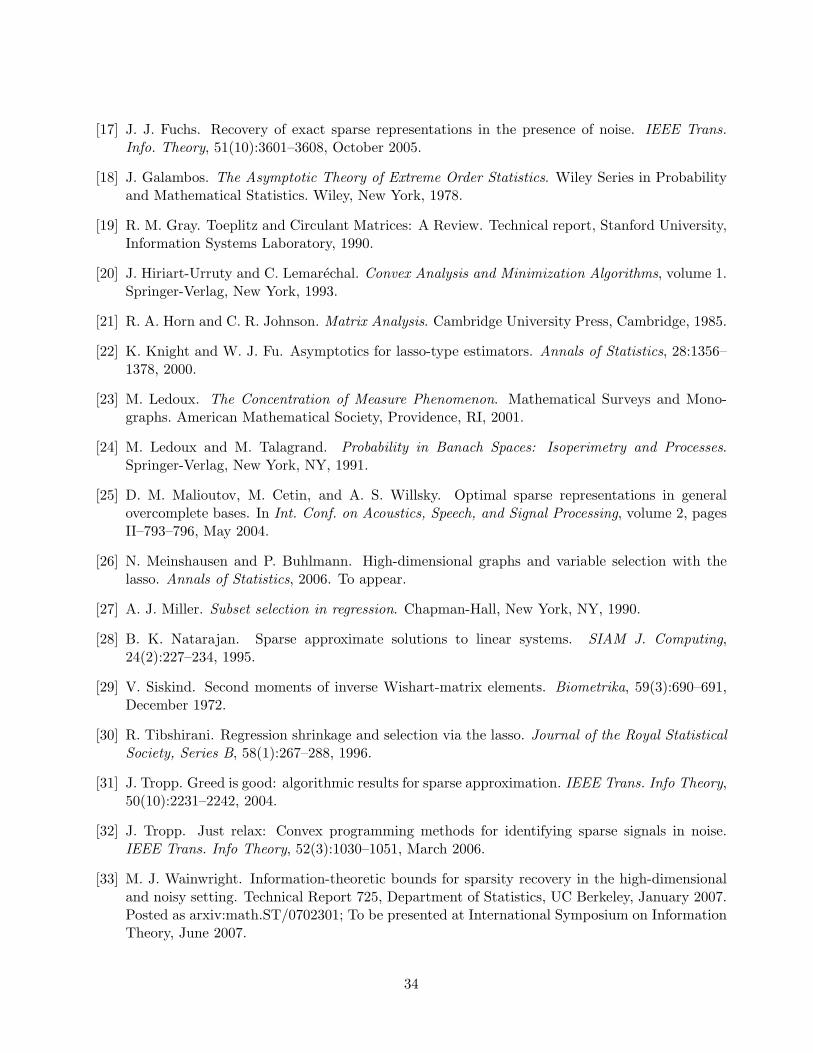
[17] J. J. Fuchs. Recovery of exact sparse representations in the presence of noise. IEEE Trans.Info. Theory, 51(10):3601–3608, October 2005.
[18] J. Galambos. The Asymptotic Theory of Extreme Order Statistics. Wiley Series in Probabilityand Mathematical Statistics. Wiley, New York, 1978.
[19] R. M. Gray. Toeplitz and Circulant Matrices: A Review. Technical report, Stanford University,Information Systems Laboratory, 1990.
[20] J. Hiriart-Urruty and C. Lemarechal. Convex Analysis and Minimization Algorithms, volume 1.Springer-Verlag, New York, 1993.
[21] R. A. Horn and C. R. Johnson. Matrix Analysis. Cambridge University Press, Cambridge, 1985.
[22] K. Knight and W. J. Fu. Asymptotics for lasso-type estimators. Annals of Statistics, 28:1356–1378, 2000.
[23] M. Ledoux. The Concentration of Measure Phenomenon. Mathematical Surveys and Mono-graphs. American Mathematical Society, Providence, RI, 2001.
[24] M. Ledoux and M. Talagrand. Probability in Banach Spaces: Isoperimetry and Processes.Springer-Verlag, New York, NY, 1991.
[25] D. M. Malioutov, M. Cetin, and A. S. Willsky. Optimal sparse representations in generalovercomplete bases. In Int. Conf. on Acoustics, Speech, and Signal Processing, volume 2, pagesII–793–796, May 2004.
[26] N. Meinshausen and P. Buhlmann. High-dimensional graphs and variable selection with thelasso. Annals of Statistics, 2006. To appear.
[27] A. J. Miller. Subset selection in regression. Chapman-Hall, New York, NY, 1990.
[28] B. K. Natarajan. Sparse approximate solutions to linear systems. SIAM J. Computing,24(2):227–234, 1995.
[29] V. Siskind. Second moments of inverse Wishart-matrix elements. Biometrika, 59(3):690–691,December 1972.
[30] R. Tibshirani. Regression shrinkage and selection via the lasso. Journal of the Royal StatisticalSociety, Series B, 58(1):267–288, 1996.
[31] J. Tropp. Greed is good: algorithmic results for sparse approximation. IEEE Trans. Info Theory,50(10):2231–2242, 2004.
[32] J. Tropp. Just relax: Convex programming methods for identifying sparse signals in noise.IEEE Trans. Info Theory, 52(3):1030–1051, March 2006.
[33] M. J. Wainwright. Information-theoretic bounds for sparsity recovery in the high-dimensionaland noisy setting. Technical Report 725, Department of Statistics, UC Berkeley, January 2007.Posted as arxiv:math.ST/0702301; To be presented at International Symposium on InformationTheory, June 2007.
34

[34] M. J. Wainwright, P. Ravikumar, and J. Lafferty. High-dimensional graph selection using ℓ1-regularized logistic regression. In NIPS Conference, December 2006.
[35] P. Zhao and B. Yu. Model selection with the lasso. Technical report, UC Berkeley, Departmentof Statistics, March 2006. Accepted to Journal of Machine Learning Research.
35