Second-Order Systems - Utah ECEece.utah.edu/~ece3510/lab2.pdf · · 2005-01-11The transfer...
7
Click here to load reader
Transcript of Second-Order Systems - Utah ECEece.utah.edu/~ece3510/lab2.pdf · · 2005-01-11The transfer...

Second-Order Systems
Objectives
The objective of this lab is to study the characteristics of step re-sponses and of sinusoidal responses for second-order systems. Crit-ically damped and underdamped systems are considered. Conceptsof rise time, settling time, percent overshoot, and frequency of os-cillations are introduced for step responses. For sinusoidal inputs,the steady-state responses are studied first, and peaking in the fre-quency domain is observed for underdamped systems. Transientresponses are also investigated.
Introduction
In the lab on first-order systems, the response of a brush DC motor with the voltage v (V
or volts) considered as an input, and the angular velocity ω (rad/s or s−1) considered as anoutput, was found to be approximately described by a first-order model
P (s) =ω(s)
v(s)=
k
s+ a. (8.8)
If θ, the angular position, is considered to be the output, a slightly different model results.
Since the angular position is the integral of the velocity, a second-order transfer function is
obtained
P (s) =θ(s)
v(s)=
k
s(s+ a). (8.9)
Note that the second-order system has a pole at s = −a and a pole at s = 0.We consider the motor under a feedback control law of the form
v(t) = kP (r(t)− θ(t)), (8.10)
where kP is a parameter to be selected, called the proportional gain. The objective is for θ(t)
to track r(t), the reference input, which is now considered to be the input to the system. The
control law is called a proportional control law because the control input is proportional to
the error between the reference input and the output. In the Laplace domain, equation (8.10)
becomes
v(s) = kP (r(s)− θ(s)). (8.11)
229

The transfer function from the input r to the output θ can be verified to be
PCL(s) ,θ(s)
r(s)=
kkPs2 + as+ kkP
. (8.12)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Real Axis
Imag
Axi
s
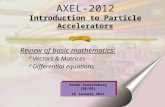
Figure 8.23: Root-locus for second-order system
For different values of the parameter kP , various second-order systems are obtained. Fig.
8.23 shows the locus of the poles of the transfer function (8.12) as kP varies from 0 to ∞,assuming k = 1 and a = 1. For small kP , the two poles are close to the original values at s = 0
and s = −1. As the gain increases, the two poles move closer together, eventually mergingand splitting from the real axis as a complex pair. For larger values of kP , the real parts of
the poles remain constant, and the imaginary parts continue to grow. A system for which the
two poles are real is called overdamped. If the two poles are complex, it is called underdamped.
The limit case where the poles are real and equal is called critically damped. This situation
occurs for a2 = 4kkP .
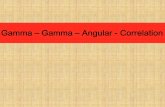
The step response of a system is the response to an input r(t) = r0. Fig. 8.24 shows
the step responses for two values of kP . The magnitude of the input is r0 = 1. The dashed
line is the response that corresponds to kP = 0.25, the value such that the two poles are real
and equal (critical damping). The solid line corresponds to kP = 1.25, the value such that
230

0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
Out
put
Figure 8.24: Step responses of second-order systems
the poles are complex and with imaginary parts equal to twice the real parts (underdamped).
When the poles are complex, with imaginary parts greater than or equal to the real parts, the
response exhibits overshoot and oscillations. The angular frequency of the oscillations is equal
to the imaginary part of the poles (in rad/s). In Fig. 8.24, the period of the oscillations is
approximately 6 seconds, and the imaginary part of the poles is 1 rad/s.
One defines the rise time as the time it takes for the output to reach the steady-state value.
Because the value is only reached asymptotically, it is common to define the 10-90% rise time,
as the time it takes for the output to move from 10% to 90% of the steady-state value. The
settling time is the time it takes for the output to reach and stay within a certain percentage
of the final value. Several values of the percentage are used, with 2% being common. We will
refer to this settling time as the 98% settling time. One also defines the percent overshoot as
the percentage of overshoot over the steady-state value.
In this lab, we also consider the responses to sinusoidal inputs
r(t) = r0 sin(ω0t+ φ0) (8.13)
In the steady-state, the response of the system is given by
θss(t) =M(ω0) r0 sin(ω0t+ φ0 + α(ω0)), (8.14)
231

where the magnitude M(ω0) and the phase α(ω0) satisfy
M(ω0) = |PCL(jω0)| , α(ω0) = arg(PCL(jω0)). (8.15)
and PCL is the transfer function from r to θ given in (8.12).
0 0.1 0.2 0.3 0.4 0.5-180-160-140120-120
-100-80-60-40-2020
00
Frequency (Hz)Frequency (Hz)
s)gr
ees
ase
(deg
Pha
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Frequency (Hz)
tude
Mag
ni
0 0.1 0.2 0.3 0.4 0.5
Figure 8.25: Frequency responses of second-order systems
Fig. 8.25 shows the frequency responses of the two second-order systems for kP = 0.25 and
kP = 1.25, assuming a = k = 1. The dashed lines are for kP = 0.25 (critical damping) and the
solid lines are for kP = 1.25 (underdamped). On the left are the magnitudes of the frequency
responses (that is, M in equation (8.15)), and on the right are the phases in degrees (that is, α
in equation (8.15)). The x-axis has been labelled in Hz, rather than rad/s, with 0.16 Hz being
approximately 1 rad/s. Note that, for the underdamped case, the magnitude of the frequency
response peaks to a value about 25% higher than the DC value. The steady-state response
for that frequency will, therefore, be higher than for any other frequency. This phenomenon
is usually called resonance. For a lightly damped system, the frequency of peaking is close to
the value of the imaginary part of the pole, which is 1 rad/s in this example.
Pre-lab
Verify analytically equation (8.12). Then, for the values of k and a corresponding to the DC
motor (for simplicity, you may let k = 1000 and a = 100), calculate the values of kP such that
232

the closed-loop poles are real and equal. Also compute kP such that the imaginary parts are
equal to twice the real parts. In Matlab, calculate and plot the step responses of the system
for the two values of kP . The Matlab function step may be used. You should check the help
files for the functions step and tf to get the correct syntax.
Determine from the plots the values of the 10-90% rise time and of the 98% settling time.
For the underdamped case, determine the percent overshoot and the frequency of oscillation.
To obtain the frequency of oscillation, you may estimate the half period as the time between the
first peak (overshoot) and the second peak (undershoot). Compare the frequency of oscillation
to the imaginary part of the pole.
In Matlab, calculate and plot the frequency response of the DC motor under proportional
control, for the critical and for the underdamped cases. In other words, plot the equivalent
of Fig. 8.25 for the specific values of the motor. The Matlab function freqs may be used for
that purpose. With freqs, you will need to enter the frequencies in rad/s, but be sure to label
your plots in Hz, as in Fig. 8.25. From the plots, determine the value of the frequency where
peaking occurs, and give the amount of peaking as a percentage of excess over the value of the
DC gain. Also determine the phase lag of the response at the frequency of peaking.
Experiments
Equipment needed
You will need a brush DC motor, a dual power amplifier, and a cable rack.
Preliminary testing
Carry out the same testing procedure as in the lab on first-order systems. Transfer the files
LAB2.C and LAB3.C to your account. Compile and create executable programs for these files.
Step responses
The program LAB2 lets you first enter a value of the proportional gain. Then, you apply the
value of the reference input r through the keyboard, and may change it in real-time. The
reference input is for the angular position of the rotor, and is given in degrees. Using the
program, obtain the step responses for the critical and underdamped cases and for a reference
input equal to 90◦. From the plots, determine the rise times and settling times, and for the
underdamped case, the percent overshoot and the frequency of the oscillations. Follow the
same procedure as in the pre-lab. You should find that the overshoot and the frequency
233

of oscillation are somewhat higher than expected. The origin of the discrepancy is in the
additional dynamics of the motor related to the inductance of the motor, an effect that was
observed in the step responses of the lab on first-order systems, but was neglected in the model.
Sinusoidal responses
The program LAB3 lets you enter values for the proportional gain, for the magnitude of the
reference input r0, and for the phase φ0. Then, the value of the frequency ω0 is entered and
may be changed in real-time. Note that the magnitude of the reference input is expressed in
degrees (giving the reference angular position of the motor in degrees), and that the frequency
of the reference input is given in Hz. All the experiments concern the underdamped case, so
that the value of kP that should be used is the value calculated for that case.
Test the program by applying a sinusoidal input with r0 = 10 degrees, φ0 = 0, and a
frequency of 1 Hz. Having checked that all works according to expectations, run an experiment
where you step the frequency every second according to the sequence 5, 10, 15, 20, 25, and 30
(Hz). Plot the response and estimate the frequency of peaking, as well as the percentage of
peaking (you may run separate experiments if you want to estimate the frequency of peaking
more precisely). Compare the results to those predicted by the analysis. You should find that
the percentage and the frequency of peaking are somewhat higher than expected. As for the
step responses, this effect is due to the neglected dynamics related to the inductance of the
motor. From the plot of the response with steps in frequency, measure the magnitude of the
response for each frequency, and draw a crude plot of the magnitude of the frequency response
as a function of frequency (in Hz) using the results.
Run a separate experiment at the frequency of peaking, and plot both the input and output
signals on the same graphs. Estimate the phase lag of the frequency response α and compare to
the value of the pre-lab. Next, run an experiment with a frequency of 50 Hz and a phase φ0 = 0
and observe that the transient response reaches values that are considerably higher than the
steady-state value. However, the transient response varies significantly with the phase of the
input signal. To illustrate this point, repeat the experiment with a different phase, adjusted
to minimize or at least significantly reduce the transient response. Calculate the amount of
overshoot, or peaking in the time domain, as a percentage of excess over the steady-state
response (for φ0 = 0 and for the phase that minimizes the transient response).
Report at a glance
Be sure to include:
234

• Pre-lab calculations.
• Plots of the step responses, with the values of the rise time, settling time, percent over-shoot, and frequency of oscillation.
• Plot of the response with steps in frequency. Value of the percentage of peaking in thefrequency domain and of the frequency of peaking. Crude magnitude plot.
• Plot of the response at the frequency of peaking, with the value of α.
• Plot of the transient responses at 50Hz for two values of the phase. Percentage value ofthe peaking in the time domain.
• Comparison of the results of the pre-lab and experiments.
• Comments.
235