
Scienza Delle Costruzioni - Prof Elio Sacco

of 112
-
Upload
mario-sabatino -
Category
Documents
-
view
615 -
download
8
Transcript of Scienza Delle Costruzioni - Prof Elio Sacco
Capitolo 1 TORSIONE PER LA SEZIONE GENERICA (prof. Elio Sacco)1.11.1.1
Torsione per la sezione genericaCinematica
Nel caso di sezione generica, la cinematica della trave consiste nella rotazione relativa tra le sezioni della trave secondo unangolo specico di rotazione costante lungo lasse della trave, come accade per la sezione circolare, ed un ingobbamento della sezione anchesso costante rispetto ad x3 . Si assume quindi che il vettore di spostamento abbia la forma: u = x3 x + e3 ovvero in forma esplicita: u1 = x2 x3 u2 = x1 x3 u3 = (1.2) (1.1)
essendo = (x1 , x2 ) la funzione di ingobbamento che dipende solo dalla geometria della sezione e x2 x = (1.3) x1 Denito che sia il campo di spostamenti dalla (1.1) possibile calcolare le deformazioni ad esso associato: 11 = 22 = 33 = 12 = 0 213 = ( ,1 x2 ) 223 = ( ,2 + x1 ) 5 (1.4)
6
CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
ovvero, introducendo il vettore di deformazione: 1 213 = = = ( + x ) 2 223
(1.5)
1.1.2
Legame costitutivo
Le tensioni si ricavano tramite legame costitutivo: 11 = 22 = 33 = 12 = 0 13 = G ( ,1 x2 ) 23 = G ( ,2 + x1 ) (1.6)
ovvero, introducendo il vettore le cui due componenti sono le tensioni tangenziali non nulle: 13 = = G ( + x ) (1.7) 23
1.1.3
Equilibrio
Le equazioni indenite di equilibrio forniscono: 0 = 13,3 = G ,3 ( ,1 x2 ) 0 = 23,3 = G ,3 ( ,2 + x1 ) 0 = 13,1 + 23,2 = G ( ,11 + ,22 ) (1.8)
La prima e la seconda delle (1.8) sono vericate poich, per ipotesi, costante lungo lasse della trave. Al contrario, la terza delle (1.8) non automaticamente vericata e conduce allequazione di campo: ,11 + ,22 = = 0 (1.9) Lequazione ai limiti sul mantello della trave, come illustrato in gura 1.1, fornisce: 0 = n = G ( + x ) n La (1.10) equivale a: 0 = n + x n Essendo x = e3 x, lequazione 1.11 diventa: 0 = n e3 n x = n t x (1.11) (1.10)
1.1. TORSIONE PER LA SEZIONE GENERICA
7
G x1 x t n x2
Figura 1.1: Torsione per la sezione generica. con t = e3 n la tangente al contorno della sezione retta. Posto 2 = x x, il vettore posizione del generico punto della sezione si calcola come: 1 x = 2 = 2 per cui la (1.11) si riscrive nella forma: 0 = n t Allora, lequazione di equilibrio al contorno si pu scrivere come: n = t (1.14) (1.13) (1.12)
1.1.4
Problema di Neumann
In denitiva lequazione indenita di equilibrio (1.9) e la condizione ai limiti (1.14) conducono al seguente problema alle derivate parziali per la determinazione di : = 0 n = t in A su A (1.15)
noto come problema di Neumann per lequazione di Laplace. E chiaro laspetto puramente geometrico del problema (1.15). In analisi matematica si mostra che la soluzione del problema di Neumann esiste ed unica, a meno di una costante arbitraria, purch sia soddisfatta la condizione: Z n ds = 0 (1.16)A
8
CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
Nel caso in esame la condizione di esistenza (1.16) soddisfatta. Infatti, tenendo conto delle (1.14) e (1.12), si ha: Z n ds = Z t ds = Z 1 2 t ds = 0 2 (1.17)
A
A
A
essendo (2 ) t ds un dierenziale esatto. La costante a meno della quale si individua la soluzione del problema rappresenta uno spostamento rigido lungo lasse x3 della trave. Indicando con w = la componente dello spostamento del generico punto in direzione dellasse della trave, lindeterminazione della soluzione del problema (1.15) eliminata ponendo nullo lo spostamento medio: 1 w= A Z 1 w dA = A A Z dA = 0 = Z dA = 0 (1.18)
A
A
in tal modo la funzione (x1 , x2 ) resta univocamente determinata.
1.1.5
Risultanti
E necessario ora vericare la validit della soluzione, controllando che la risultante sia nulla ed il momento risultante dia il momento torcente applicato. A tale scopo si osserva inizialmente che le caratteristiche della sollecitazione N ed Mf sono nulle essendo 33 = 0. Inoltre, ricordando che n = 0 su A, si consideri lintegrale: Z Z 0= x ( n) ds = x i3 ni ds (1.19)A A
che, per il teorema della divergenza fornisce: Z 0 = (x i3 ),i dA A Z Z = x i3,i dA + x,i i3 dA ZA ZA = x i3,i dA + i3 dA A A Z Z = x div dA + i dAA A
(1.20)
= Vi
essendo per la (1.8)2 div = 0. In denitiva, si ricava che le risultanti di taglio sono nulle.
1.1. TORSIONE PER LA SEZIONE GENERICA
9
Per quanto riguarda il momento torcente, tendendo in conto le espressioni delle tensioni tangenziali (1.6)2 e (1.6)3 , si ha: Mt
= e
3
Z
= G = G
2 x1 + x2 + x1 ,2 x2 ,1 dA 2 A Z = G Ip + (x1 ,2 x2 ,1 ) dAA
ZA
ZA
x dA =
Z
A
(x1 23 x2 13 ) dA
(1.21)
[x1 (,2 + x1 ) x2 (,1 x2 )] dA
Introducendo il fattore di rigidezza torsionale. Jt : Jt = Ip + si ottiene: = Mt G Jt Z (x1 ,2 x2 ,1 ) dA (1.22)
A
La soluzione in termini di spostamenti, deformazioni e tensioni, del problema dellequilibrio elastico della trave di sezione generica soggetta a torsione, quindi: Mt u1 = x2 x3 G J t Mt u2 = x1 x3 G J t Mt u3 = G J t Mt (,1 x2 ) G Jt Mt = (,2 + x1 ) G Jt Mt (,1 x2 ) Jt Mt = (,2 + x1 ) Jt
(1.23)
213 = 223
(1.24)
13 = 23
(1.25)
10 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
1.2
Funzione di Prandtl
Il problema della torsione pu essere risolto in maniera alternativa attraverso luso della funzione di Prandtl detta anche la funzione delle tensioni. Si suppone che le tensioni derivino dalla funzione delle tensioni (o di Prandtl) F = F (x1 , x2 ) tramite la relazione: F,2 = e3 F (1.26) = F,1 ovvero: 13 = F,2 23 = F,1 (1.27) In tal modo la terza equazione indenita di equilibrio diventa: 0 = 13,1 + 23,2 = F,21 F,12 = 0 ovvero automaticamente soddisfatta. Dalle tensioni denite tramite le relazioni (1.27) si ricavano le deformazioni: 11 = 22 = 33 = 12 = 0 F,2 213 = G F,1 223 = G (1.29) (1.28)
1.2.1
Problema di Dirichlet
La particolare scelta per la rappresentazione delle tensioni tangenziali assicura la condizione di equilibrio. Per vericare la congruenza associata alle deformazioni (1.29), necessario imporre il soddisfacimento delle equazioni indenite di congruenza interna, che nel caso generale risultano: 12,32 12,33 22,33 11,32 11,33 11,22 13,22 13,23 23,23 13,12 13,13 12,12 = = = = = = 22,31 32,31 32,32 21,31 31,31 21,21 23,21 33,21 33,22 23,11 33,11 22,11
(1.30)
e per il problema in esame si riducono alle: 0 = 13,22 23,21 = (13,2 23,1 ),2 0 = 13,12 23,11 = (13,2 23,1 ),1 (1.31)
1.2. FUNZIONE DI PRANDTL in altri termini si ha: Lequazione (1.32) pu essere riscritta in termini di tensioni tangenziali: 2G (13,2 23,1 ) = 13,2 23,1 = k0 essendo k0 una costante. Tenendo conto delle relazioni (1.27), la (1.33) diventa: 13,2 23,1 = (F,11 + F,22 ) = k0 13,2 23,1 = costante
11
(1.32)
(1.33)
(1.34)
Daltra parte, ricordando le espressioni (1.6)1 e (1.6)2 delle tensioni tangenziali ottenute a partire dalla formulazione cinematica del problema, si ha: 13,2 23,1 = G ( ,21 ,12 + 1 + 1) = 2 G e quindi, per la (1.34), k0 = 2 G , ovvero: (F,11 + F,22 ) = F = 2 G (1.36) (1.35)
cio F costante su A. Nel caso di sezione monoconnessa la costante pu essere posta uguale a zero perch lo stato tensionale non dipende da questa costante, essendo ottenuto come gradiente di F . Lequazione di campo (1.36) con la condizione al limite (1.37) conducono al problema di Dirichlet: F = 2 G in A (1.38) F =0 su A b Naturalmente, una qualsiasi funzione F denita come: con k costante risolve il problema (1.38). b F =F +k
che rappresenta la condizione necessaria e suciente di congruenza per il problema della torione di una sezione monoconnessa. Per quanto riguarda la condizione di equilibrio sul mantello della trave, la (1.10) si trasforma in: 0 = n = e3 F n = F e3 n = F t (1.37)
1.2.2
Risultanti
Nasce ora lesigenza di vericare che la risultante delle tensioni sia nulla e che il momento risultante fornisca una sollecitazione di pura torsione. La risultante delle tensioni tangenziali denite dalla relazione (1.26) vale: Z Z Z 3 V= dA = F e dA = F n e3 ds = 0 (1.39)A A A
12 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO) b essendo F = 0 sul contorno della sezione. Anche qualora si consideri la funzione F , che assume valore k sul contorno, si dimostra agevolmente che V = 0. Infatti: V = b F e3 dA A A Z Z 3 = F n e ds + k n e3 ds A A Z = 0k t ds = 0 dA =A
Z
Z
(1.40)
Il momento torcente vale invece: Z Z t 3 3 x (F e3 ) dA M = e x dA = e A Z A Z 3 3 = x e (F e ) dA = x F dA A ZA Z = div (F x) dA + F div (x) dA ZA Z A = F x n ds + 2 F dAA A
(1.41)
ma il primo integrale dellultimo termine nullo, essendo per la seconda delle (1.38) F = 0 su A, per cui si ha: Z t 2 F dA (1.42) M =A
b Nel caso si consideri F si perviene allo stesso risultato. Infatti, si ha: = ZA Z b F x n ds + Z F x n ds kA Z
b 2 F dA
= 0k
div (x) dA + 2 F dA + 2 k A A Z = 0 k 2 dA + 2 F dA + 2 k A A A Z = 0 2 k A + 2 F dA + 2 k A A Z = 2 F dA ZAA
AZ
A Z
x n ds +
Z
2 F dA + 2 k
A
Z
dA
A
1.3. SEZIONE RETTANGOLARE ALLUNGATA
13
b x1 a
x2
Figura 1.2: Sezione rettangolare allungata.
1.2.3
Ingobbamento
Inne, invertendo la relazione (1.7) e tenendo conto della (1.26) si ricava lespressione del gradiente della funzione di ingobbamento in funzione della funzione delle tensioni F : = 1 3 1 e3 x = e (F x) G G 1 x2 F,2 = + x1 G F,1 (1.43)
Noti che siano la funzione F e langolo unitario di torsione tramite le equazione (1.38) e (1.42), dalla (1.43) si ricava in funzione del momento torcente e quindi si deniscono gli spostamenti della trave.
1.3
Sezione rettangolare allungata
Si considera ora il caso in cui la sezione della trave di forma rettangolare di dimensione a b con un lato di dimensione molto maggiore dellaltro: a >> b. In questo caso non appare applicabile a rigore il principio di Saint-Venant, in quanto, come risulta evidente, la sezione non compatta. Si suppone allora che la sollecitazione di torsione sia applicata in modo opportuno sulle basi della trave, ed in seguito si vedr cosa si intende per modo opportuno. Si sceglie il sistema di riferimento in modo tale che lorigine sia baricentrica e lasse x1 sia parallelo al lato maggiore a, come mostrato in gura 1.2. Se la sezione rattengolare sucientemente allungata, ed al limite il rapporto a/b tra il lato maggiore e quello minore tende ad innito, appare giusticato supporre che la tensione tangenziale non dipenda dallascissa x1 , ovvero ,1 = 0. La terza equazione indenita di equilibrio (1.8), riscritta nella forma: 13,1 + 23,2 = 0 (1.44)
assicura che 23,2 = 0, ovvero la componente tangenziale 23 non dipende da x2 . Daltra parte, la condizione al contorno sul mantello della trave (1.10) impone che sul bordo A
14 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO) della sezione la tensione tangenziale sia tangente al bordo stesso. Se ne deduce che sui due lati maggiori della sezione rettangolare la tensione tangenziale ha componente solo lungo la direzione x1 , ovvero 23 (b/2) = 0. Allora lungo ogni corda la componente tangenziale 23 nulla.
1.3.1
Funzione di Prandtl
con c costante che viene deteminata utilizzando lequazione di congruenza nel campo A (1.381 ): F = 2 c = 2 G (1.46)
Si vuole ora arontare il problema della torsione per la sezione rettangolare allungata tramite la teoria di Prandtl, utilizzando cio la funzione delle tensioni F . Sulla base delle considerazioni appena sviluppate, si tratta di costruire una funzione F che soddisfa le condizioni (1.38), ovvero che sia a laplaciano costante e che assuma valore nullo per x2 = b/2. A tale scopo si assume: b b b2 2 x2 = c x2 (1.45) F = c x2 + 2 2 4
In denitiva, ricavando la costante c dallequazione (1.46) e sostituendola nella forma di rappresentazione di F (1.45), si ottiene: b2 2 (1.47) F = G x2 4 Langolo specico di torsione si calcola imponendo che il momento risultante delle tensioni tangenziali sia il valore assegnato M t . Infatti, utilizzando la formula (1.42) si ha: Z Z b2 t 2 dA = G Jt x2 2 F dA = 2 G (1.48) M = 4 A A dove il fattore di rigidezza torsionale Jt vale: Jt = a b3 3 (1.49)
Invertendo la (1.48), tenuto conto della relazione (1.49), si ottiene nalmente: = 3 Mt G a b3 (1.50)
Una volta trovato il valore di si sostituisce nellespressione (1.47) della funzione di Prandtl F e si ottiene: b2 3 Mt 2 (1.51) x2 F = a b3 4
1.3. SEZIONE RETTANGOLARE ALLUNGATA
15
Inne, utilizzando le espressioni (1.27) che forniscono le componenti della tensione tangenziale in funzione di F , si ha: 13 = F,2 = 6 Mt x2 a b3 23 = F,1 = 0 (1.52)
Il modo opportuno, di cui si parlava in precedenza, con il quale viene applicata la sollecitazione di torsione sulle basi della trave, denito dalla forma delle tensioni tangenziali (1.52). Nella generica sezione della trave, la tensione tangenziale massima in valore assoluto si ha per x2 = b/2: 3 Mt max = (1.53) a b2
1.3.2
Eetto di bordo
Tenendo conto dellequazione (1.47) lespressione della tensione tangenziale (1.52) pu essere riscritta nella forma equivalente: 13 = 2 G x2 23 = 0 (1.54)
Volendo allora calcolare il valore del momento torcente M t in funzione di , come momento risultante della distribuzione delle tensioni tangenziali espresse dalla (1.54), si ha: Z Z t 3 M = e x dA = (x1 23 x2 13 ) dA (1.55) A A Z a b3 x2 dA = G = 2G 2 6 A Si evidenzia che il risultato appena ottenuto tramite lespressione (1.55) in contrasto con quello ottenuto tramite la formula (1.48). Infatti la (1.55) fornisce un momento torcente pari alla met di quello calcolato con la (1.48). Tale risultato dovuto allapprossimazione ipotizzata sullandamento del vettore nella sezione. Le espressioni (1.54) delle tensioni tangenziali soddisfano la condizione (1.37) per x1 = a/2. Ci induce un errore che ovviamente sensibile nella prossimit degli estremi della sezione e trascurabile nel resto della sezione, purch il rettangolo sia sucientemente allungato. Le formule (1.54) forniscono una buona approssimazione dellandamento delle tensioni tangenziali nella parte centrale della sezione, mentre presentano un andamento inaccettabile per x1 = a/2. In realt, volendo soddisfare la condizione di mantello scarico su tutta la frontiera della sezione, si dovr ammettere un dierente andamento delle tensioni tangenziali, rispetto a quello denito dalla (1.54), in particolare in prossimit delle due zone di estremit della sezione.
16 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
Px1
Figura 1.3: Zona di estremit della sezione rettangolare allungata. Si consideri allora una di queste due zone, e si imponga la condizione di equilibrio su una qualsiasi parte P della sezione che risieda in questa zona, come mostrato in gura 1.3. Lequazione di equilibrio scritta in forma integrale su P fornisce: 0= Z div( ) dA =P
Z
P
n ds
(1.56)
ovvero, come noto per i cosidetti campi solenoidali, a divergenza nulla, il usso del vettore entrante deve eguagliare quello uscente nella parte P della sezione. Con riferimento alla gura 1.3, volendo allora rispettare la condizione di mantello laterale della trave scarico, si dovr supporre che, per bilanciare il usso entrante in P, la tensione tangenziale in prossimit degli estremi della sezione deve cambiare direzione ed assumere quindi componente non nulla in direzione di x2 . In denitiva, nelle zone in prossimit di x1 = a/2 si hanno tensioni tangenziali con componente non nulla in direzione x2 . Tali tensioni, per quanto relative ad una zona di piccola estenzione, hanno un braccio dapplicazione pari circa a/2, e quindi contribuiscono notevolmente nel calcolo del momento torcente. Per correggere allora la formula (1.55) si dovr tener conto anche del momento torcente derivante dalle tensioni tangenziali 23 agenti nelle vicinanze delle estremit della sezione rettangolare. A tale scopo si suppone per semplicit che la dimensione d di ognuna delle due zone di estremit della sezione ove si hanno tensioni tangenziali 23 sia molto piccola, come schematicamente riportato in gura 1.4. Tenendo conto della formula (1.541 ), il usso q1 delle tensioni tangenziali 1 vale: b2 q1 = 1 d = 2 G d = G x2 2 4 b/2 b/2 Zx2
Z
x2
(1.57)
Si consideri ora come parte P la zona della sezione delimitata dalla linea tratteggiata in gura 1.4. Lequazione (1.56) impone che il usso totale q1 delle tensioni tangenziali 13 entranti
1.4. SEZIONE SOTTILE APERTA
17
1 P 2 x1 q2 q1
d
Figura 1.4: Distribuzione delle tensioni tangenziali nella zona di estremit della sezione rettangolare. in P eguagli il usso totale q2 delle tensioni tangenziali 23 uscenti da P . Ci implica che: 2 b 2 q2 = q1 = G (1.58) x2 4 Se la dimensione di d tende a zero, il valore di q2 non cambia. In tal modo, su ognuna delle due corde di estremit della sezione rettangolare agir una distribuzione parabolica di q2 . La risultante del usso q2 vale: Z b/2 2 Z b/2 b b3 2 q2 dx2 = G R= x2 dx2 = G (1.59) 4 6 b/2 b/2 In denitiva, si pu calcolare il momento torcente risultante dalla distribuzione delle tensioni tangenziali come la somma del momento torcente ricavato dalla formula (1.55) aumentato dellapporto provocato dalla presenza delle forze R agenti sulle estremit della sezione: b3 a b3 a b3 +G a=G (1.60) Mt = G 6 6 3 che coincide perfettamente con la formula (1.48).
1.4
Sezione sottile aperta
Si considera il caso in cui la sezione retta della trave sia costituita da una striscia sottile di materiale di spessore variabile o non, avente come linea media la curva piana, di lunghezza a, di equazione: x1 = x1 () x2 = x2 () (1.61)
18 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
m t
Figura 1.5: Generico tratto della sezione sottile. con ascissa curvilinea del generico punto della linea media misurata a partire da unorigine O, generalmente scelta in corrispondenza di unestremit della linea. Si assume per ipotesi che la linea media non formi circuiti chiusi. In questo caso per corda relativa allascissa curvilinea si intende sempre quella ortogonale alla linea media della sezione, cui corrisponde uno spessore b(). La sezione sottile deve soddisfare alcuni requisiti geometrici: a >> b() d b() > b() ove () rappresenta il raggio di curvatura della linea media della sezione valutato in corrispondenza dellascissa curvilinea . Si esamina inizialmente un tratto di lunghezza innitesima d della sezione sottile. Si sceglie un riferimento locale destrogiro denito dal versore t della tangente alla linea media della sezione e dal versore m denito come m = e3 t. Il generico punto giacente sulla corda b() individuato dalla distanza dalla linea media, come mostrato in gura 1.5. Se il raggio di curvatura () della linea media della striscia di materiale grande rispetto alla corda generica b(), lelemento di sezione di lunghezza d pu con buona approssimazione essere considerato come un tratto di una sezione di forma rettangolare allungata.
1.4. SEZIONE SOTTILE APERTA
19
Analogamente al caso della sezione rettangolare allungata, in corrispondenza della generica ascissa curvilinea, la funzione di Prandtl F pu essere scelta con buona approssimazione come quella denita dalla formula (1.47): b()2 2 F = G (1.62) 4 Laliquota innitesima di momento torcente assorbita dal tratto di lunghezza d per la relazione (1.42) vale: Z b/2 b()3 b()2 t 2 dM = 2 G d d = G d (1.63) 4 3 b/2 Integrando la (1.63) su tutta la linea media della sezione sottile allungata, si deve ottenere il valore del momento torcente totale agente sulla sezione aperta: Z a b()3 t M =G d = G Jt (1.64) 3 0 Le tensioni tangenziali si calcolano tenendo conto delle espressioni (1.27), cio derivando la funzione delle tensioni F denta dalla (1.62) rispetto alla coordinata nello spessore e rispetto allascissa curvilinea . In denitiva di ha: = F, = 2 G d b() 1 b() 0 = F, = G 2 d (1.65)
ove lultimo termine della (1.652 ) tanto pi piccolo, e quindi trascurabile, quanto pi lo spessore della sezione varia lentamente lungo lascissa curvilinea. In termini di momento torcente applicato, la componente non trascurabile della tensione tangenziale si determina dalle relazioni (1.651 ) e (1.64): 2 Mt (1.66a) = Jt che risulta analoga alla formula (1.52) ottenuta per la sezione rettangolare allungata. Inne la tensione tangenziale massima in valore assoluto, relativa allascissa curvilinea , vale: max = Mt b() Jt (1.67a)
Nel caso che la sezione sottile ha spessore costante, cio la dimensione b della corda non dipende dallascissa curvilinea , il fattore di rigidezza torsionale Jt vale: Z a a b3 b()3 Jt = d = (1.68) 3 3 0 Si nota che lespressione della rigidezza torsionale (1.68) perfettamente analoga a quella deteminata per la sezione rettangolare allungata.
20 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
c11 1 2
c1
c22
c2
Figura 1.6: Tensioni tangenziali per la sezione chiusa.
1.5
Sezione sottile chiusa
Si esamina ora il caso in cui la linea media della sezione sottile formi un circuito chiuso. In tal caso la sezione detta chiusa o biconnessa. Lascissa curvilinea che percorre la sezione chiusa scelta in modo da girare in senso antiorario lungo la striscia di materiale che denisce la sezione. Il problema della torsione per la sezione sottile chiusa si aronta in termini di tensioni. In particolare, assumendo che lo spessore sia piccolo rispetto alla lunghezza della linea media della sezione, si pu ragionevolmente supporre che la tensione tangenziale abbia direzione della tangente t e, assegnata lascissa , sia costante lungo la corda con valore c . Tale stato tensionale rispetta ovunque la condizione di equilibrio sul mantello della trave. Per le prime due equazioni di indenite di equilibrio le tensioni tangenziali sono costanti lungo lasse della trave. La terza equazione indenita di equilibrio viene soddisfatta in modo integrale per il tratto generico tratto della sezione sottile chiusa. Infatti, scelte due corde indicate in gura 1.6 con 1 e 2, di dimensioni b1 e b2 , alle quali corrispondono valori delle tensioni 1 e 2 , si impone lequilibrio della parte di trave di lunghezza unitaria, denta dalle due parti di sezioni denite dalle corde 1 e 2: c1 b1 = c2 b2 (1.69) Vista la casuale scelta delle corde 1 e 2, lequazione (1.69) conduce al risultato che il prodotto c () b() costante su tutta la sezione sottile chiusa. E necessario vericare che la distribuzione delle tensioni tangenziali fornisca una sollecitazione di pura torsione. A tale scopo si deve inizialmente controllare che la risultante V delle tensioni tangenziali sia nulla. Si ha infatti: Z Z a Z a V= c t dA = c t b d = c b t d = 0 (1.70)A 0 0
1.5. SEZIONE SOTTILE CHIUSA
21
P h() h()d/2 d
Figura 1.7: Equilibrio alla rotazione della sezione chiusa. Il momento risultante delle tensioni tangenziali vale: Z I t 3 M = e x c t dA = c b h() dA
(1.71)
= c b
I
a
h() d = 2 c b
a
dove h() d il doppio dellarea del triangolo di base d ed altezza h() rappresentato in gura 1.7 e rappresenta larea della gura geometrica che ha per contorno la linea media della sezione sottile. Invertendo lequazione (1.71) si ottiene la cosidetta prima formula di Bredt: c = Mt 2b (1.72)
La formula (1.71), ovvero la sua forma inversa (1.72), fornisce la relazione tra il valore del momento torcente M t la distribuzione di tensioni tangenziali c . Volendo ricavare la relazione tra langolo unitario di torsione ed il momento torcente applicato, si applica il principio dei lavori virtuali per un tratto di trave di lunghezza unitaria. Il sistema delle forze fornito dalla distribuzione delle tensioni tangenziali che hanno c momento torcente risultante unitario: = c 1 2b (1.73)
Gli scorrimenti angolari, valutati nel sistema degli spostamenti, sono ricavati utilizzando la relazione (1.72): 1 1 Mt = c = (1.74) G G2 b
22 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO) Eguagliando il lavoro virtuale esterno con quello virtuale interno si ottiene: Z Z 1 Mt 1 dd c dA = 1 = 2b A A 2 b G Z a Z b/2 1 Mt 1 = dd 2 G 0 b/2 b 2 b Z a Mt 1 = d 4 G 2 0 b
(1.75)
La relazione (1.75) nota come seconda formula di Bredt. Il fattore di rigidezza torsionale Jt proprio della sezione chiusa vale: Jt = Z = 4 2 a 1 d 0 b Mt G Jt (1.76)
per cui la seconda formula di Bredt si riscrive nella forma: (1.77)
Nel caso che la sezione sottile sia triconnessa, e cio costituita da due maglie chiuse, le tensioni tangenziali che insorgono nella sezione e la rigidezza torsionale sono determinati come di seguito specicato. Si denotino con q1 e con q2 i valori dei ussi nelle due maglie come illustrato in gura 1.8, tali che: t t M1 = 21 q1 M2 = 22 q2 (1.78) con 1 ed 2 rispettivamente le aree delle maglie 1 e 2, ed inoltre cont t M t = M1 + M2 = 21 q1 + 22 q2
(1.79)
Per determinare langolo unitario di rotazione si applica il principio dei lavori virtuali. Poich si intende determinare la rotazione della sezione, si sceglie un sistema di forze denito dalla sezione oggetto di studio sollecitata da una coppia torcente unitaria. Si ricorda che per applicare il PLV si deve considerare un sistema di tensioni in equilibrio, e non necessariamente congruente, con le forze assegnate. Si scelgono allora due sistemi di tensioni in equilibrio con la coppia torcente unitaria, come illustrato in gura 1.8. Considerando i due sistemi di forze SF1 ed SF2, il PLV fornisce le equazioni: Z Z = 1 1 b dA 2 b dA (1.80) 1 1 12 Z Z 1 q1 1 q2 b dA b dA = 1 21 b Gb 12 21 b Gb Z Z 1 1 q2 q1 dA dA = 2G1 1 b 2G1 12 b
1.5. SEZIONE SOTTILE CHIUSA
23
Mt
q1
q2
SS
1
1
q1*
q2*
SF1
SF2
Figura 1.8: Sezione triconnessa soggetta a torsione. = 1 b dA 2 12 Z Z2 1 q2 1 q1 b dA b dA = 2 22 b Gb 12 22 b Gb Z Z 1 1 q1 q2 dA dA = 2G2 1 b 2G2 12 b dA Z 2b 2 Z (1.81)
avendo indicato con 1 la maglia 1, con 2 la maglia 2 e con 1-2 il tratto comune della maglia 1 e 2. In denitiva si ottiene il sistema di 3 equazioni nelle 3 incognite , q1 , q2 : M t = 21 q1 + 22 q2 Z Z 1 1 q2 q1 dA dA = 2G1 1 b 2G1 12 b Z Z q2 q1 1 1 dA + dA = 2G2 12 b 2G2 1 b (1.82)
24 CAPITOLO 1. TORSIONE PER LA SEZIONE GENERICA (PROF. ELIO SACCO)
Capitolo 2 TAGLIO (prof. Elio Sacco)2.1 Formula di Jourawsky
Si considera inizialmente il caso di una sezione soggetta ad una sollectazione di taglio V. Si denisce tensione tangenziale media sulla corda AB di lunghezza b, la quantit: Z 1 B n = n ds (2.1) b A essendo n la normale uscente da A , con A la parte della sezione delimitata dalla corda AB. Scegliendo un sistema di riferimento principale dinerzia, la tensione tangenziale media si valuta attraverso la formula di Jourawsky: 1 V2 V1 (2.2) n = s + s b I11 1 I22 2 dove s e s sono rispettivamente i momenti statici di A rispetto allasse x1 ed x2 , 1 2 I11 e I22 sono rispettivamente i momenti dinerzia della sezione rispetto allasse x1 ed x2 . La formula di
2.2
Deformazione di una trave in parete sottile
Per la determinazione della deformazione indotta nella trave a causa solo della sua deformabilit a taglio, si pu applicare il principio dei lavori virtuali. Il sistema delle forze costituito da una forza F applicata, di modulo unitario, ove necessario calcolare lo spostamento, per esempio allestremit della trave, comunque diretta 25
26
CAPITOLO 2. TAGLIO (PROF. ELIO SACCO)
Per il principio dei lavori virtuali, lavoro virtuale esterno uguale lavoro virtuale interno, si ha: Z Z h/2 (x2 ) 1 u2 = b dx2 (x2 ) (x2 ) dV = L (x2 ) (2.4) G h/2 V Z h/2 V2 h2 h2 2 2 = x x2 b dx2 2 4GI11 h/2 2 4 4 6 V2 V2 = = 5 G A G As essendo As larea ecace a taglio. Il fattore di riduzione dellarea, che nel caso esaminato della sezione rettangolare vale 5/6, detto fattore di correzione a taglio. La formula di Jourawsky risulta particolarmente soddisfacente per la valutazione delle tensioni tangenziali nel caso di sezioni in parete sottili. Si consideri allora il caso di una trave soggetta ad una forza di taglio V, con sezione in parete sottile, per la quale si intende determinare lo spostamente lungo la direzione F, con kFk = 1, dovuto esclusivamente alla deformazione a taglio. Si introduca unascissa curivilinea lungo la linea media delle parete sottile e si scelga un sistema di riferimento principale dinerzia. La tensione tangenziale media sulla generica corda individuata dallascissa curvilinea , valutata nel sistema delle forze, (), e quella valutata nel sistema degli spostamenti, (), valgono rispettivamente: 1 V2 V1 1 () = KV (2.5) s1 () + s2 () = b () I11 I22 b () F2 1 F1 1 () = KF s1 () + s2 () = b () I11 I22 b () con ( s () )2
nel piano della sezione retta della trave. Il sistema degli spostamenti consiste nella trave soggetta ad una forza tagliante V. Si considera inizialmente il caso di una trave di lunghezza L con sezione rettangolare di dimensioni b h. Gli assi del sistema di riferimento coincidono con gli assi di simmetria della sezione. Si assume che la forza tagliante abbia componente non nulla solo lungo la direzione x2 , e che si intende determinare lo spostamento lungo la direzione x2 . La tensione tangenziale media valutata sulla generica corda parallela allasse x1 , valutata nel sistema delle forze, (x2 ), e quella valutata nel sistema degli spostamenti, (x2 ), valgono rispettivamente: Z 1 V2 1 V2 x2 V2 h2 2 (2.3) (x2 ) = x2 s = b y dy = b I11 1 b I11 h/2 2 I11 4 1 h2 2 (x2 ) = x2 2 I11 4
K=
I22 s () 1 I11
2.2. DEFORMAZIONE DI UNA TRAVE IN PARETE SOTTILE Si ricava allora: Fu= Z () () dV = L
27
V
Z
()
a
() b d G
(2.6)
essendo a la linea media della sezione. Tenendo conto delle (2.5), la (2.6) fornisce: Z L 1 Fu= (K V) K d F G a b () da cui si deduce: Z 1 L (K V) K d u = G a b () 2 Z 1 L K1 V1 + K1 K2 V2 d = 2 G a b () K1 K2 V1 + K2 V2 Z 1 b L = K d V G a b () b K= 2 K1 K1 K2 2 K1 K2 K2
(2.7)
con
la (2.7) si riscrive:
Introducendo il tensore simmetrico dei fattori di correzione a taglio come: Z 1 1 b 1 = K d A a b () u=
(2.8)
L 1 (2.9) V GA E necessario notare che le direzioni principali di in generale non coincidono con le direzioni principali del tensore dinerzia. Ci signica che anche se la essione associata al taglio retta, si possono avere spostamenti da taglio con componente anche lungo la direzione ortogonale allazione tagliante. Ci non si verica evidentemente nelle sezioni che ammettono un asse di simmetria, sollecitate lungo tale asse.
28
CAPITOLO 2. TAGLIO (PROF. ELIO SACCO)
Capitolo 3 DEFORMAZIONE A TAGLIO (prof. Elio Sacco)3.1 Formula di Jourawsky
Si considera inizialmente il caso di una sezione soggetta ad una sollectazione di taglio V. Si denisce tensione tangenziale media sulla corda AB di lunghezza b, la quantit: Z 1 B n = n ds (3.1) b A essendo n la normale uscente da A , con A la parte della sezione delimitata dalla corda AB. Scegliendo un sistema di riferimento principale dinerzia, la tensione tangenziale media si valuta attraverso la formula di Jourawsky: 1 V2 V1 (3.2) n = s + s b I11 1 I22 2 dove s e s sono rispettivamente i momenti statici di A rispetto allasse x1 ed x2 , 1 2 I11 e I22 sono rispettivamente i momenti dinerzia della sezione rispetto allasse x1 ed x2 . La formula di
3.2
Deformazione a taglio di una trave
Per la determinazione della deformazione indotta nella trave a causa solo della sua deformabilit a taglio, si pu applicare il principio dei lavori virtuali. 33
34
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
Il sistema delle forze costituito da una forza F applicata, di modulo unitario, ove necessario calcolare lo spostamento, per esempio allestremit della trave, comunque diretta nel piano della sezione retta della trave. Il sistema degli spostamenti consiste nella trave soggetta alla forza tagliante V. Si considera inizialmente il caso di una trave di lunghezza L con sezione rettangolare di dimensioni b h. Gli assi del sistema di riferimento coincidono con gli assi di simmetria della sezione. Si assume che la forza tagliante abbia componente non nulla solo lungo la direzione x2 , e che si intende determinare lo spostamento lungo la direzione x2 . La tensione tangenziale media sulla generica corda parallela allasse x1 , valutata nel sistema delle forze, (x2 ), e quella valutata nel sistema degli spostamenti, (x2 ), valgono rispettivamente: 1 (x2 ) = x2 2 2 I11 V2 x2 (x2 ) = 2 2 I11
h2 4 h2 4
(3.3)
Per il principio dei lavori virtuali, lavoro virtuale esterno uguale lavoro virtuale interno, si ha: Z
1 u2 =
(x2 ) (x2 ) dV = L
Z h/2 V2 h2 h2 2 2 = x x2 b dx2 2 4GI11 h/2 2 4 4 V2 6 V2 = = 5GA G As
V
Z
h/2
(x2 )
h/2
(x2 ) b dx2 G
(3.4)
essendo As = 5/6 A larea ecace a taglio. Il fattore di riduzione dellarea, che nel caso esaminato della sezione rettangolare vale 5/6, detto fattore di correzione a taglio. La formula di Jourawsky risulta particolarmente soddisfacente per la valutazione delle tensioni tangenziali, nel caso di sezioni in parete sottili. Si consideri allora il caso di una trave soggetto ad una forza di taglio V, con sezione in parete sottile, per la quale si intende determinare lo spostamente lungo la direzione F, con kFk = 1, dovuto esclusivamente alla deformazione a taglio. Si introduca unascissa curivilinea lungo la linea media delle parete sottile e si scelga un sistema di riferimento principale dinerzia. La tensione tangenziale media valutata sulla generica corda individuata dallascissa curvilinea , valutata nel sistema delle forze, (), e quella valutata nel
3.2. DEFORMAZIONE A TAGLIO DI UNA TRAVE sistema degli spostamenti, (), valgono rispettivamente: F2 1 F1 1 () = KF s1 () + s2 () = b () I11 I22 b () 1 V1 1 V2 () = s1 () + s2 () = KV b () I11 I22 b () con s2 () I K= 22 s1 () I11 Si ricava allora: Z Z () () () dV = L () b d Fu= G V a
35
(3.5)
(3.6)
essendo a la linea media della sezione. Tenendo conto delle (3.5), la (3.6) fornisce: Z 1 L Fu= (K V) K d F G a b () da cui si deduce: Z 1 L (K V) K d u = G a b () 2 Z L 1 K1 V1 + K1 K2 V2 d = 2 G a b () K1 K2 V1 + K2 V2 Z 1 b L = K d V G a b () b K= 2 K1 K1 K2 2 K1 K2 K2
(3.7)
con
Introducendo il tensore simmetrico dei fattori di correzione a taglio come: Z 1 1 b 1 K d = A a b () la (3.7) si riscrive: u=
(3.8)
L 1 (3.9) V GA E necessario notare che le direzioni principali di in generale non coincidono con le direzioni principali del tensore dinerzia. Ci signica che anche se la essione associata al taglio retta, si possono avere spostamenti da taglio con componente anche lungo la direzione ortogonale allazione tagliante. Ci non si verica evidentemente nelle sezioni che ammettono un asse di simmetria, sollecitate lungo tale asse.
36
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
3.3
Modello di trave di Timoshenko
Timoshenko1 ha proposto una teoria tecnica della trave capace di tener in conto in modo semplice, ma generalmente molto soddisfacente, la deformazione a taglio che avviene nelle travi.
3.3.1
Cinematica
La cinematica della trave denita dalla deformazione dellasse e dalle rotazioni delle sezioni. Nel seguito viene trattato esclusivamente il problema piano della trave; infatti, posto il cartesiano sistema di riferimento illustrato in gura 3.1, si considera il caso in cui la trave si inetta nel piano yz. Si assume che la sezione retta allascissa z, inizialmente piana ed ortogonale alla linea dasse della trave, a deformazione avvenuta, sia ancora piana ma non necessariamente ortogonale alla deformata dellasse della trave. In gura 3.1 riportata schematicamente la cinematica della trave, sovrapponendo gli eetti della sola essione e del taglio. Per la essione la sezione retta a deformazione avvenuta resta ortogonale alla deformata della linea dasse. Per eetto del taglio si ha uno spostamento verticale della sezione senza ulteriore rotazione della sezione stessa. Ne ceonsegue che la rotazione non risulta pi uguale alla derivata dellinessione totale della trave, ottenuta tenendo conto anche della deformazione a taglio. In denitiva, in gura 3.1 evidenziata la deformazione della tipica sezione della trave: la sezione allascissa generica z ha uno spostamento w0 lungo lasse z, non riportato in gura, uno spostamento v lungo lasse y ed inoltre presenta una rotazione intorno allasse x, ortogonale al piano yz. I parametri cinematici sono quindi lo spostamento assiale w, linessione v e la rotazione ; tali quantit sono funzioni eslcusivamente dellascissa z, i.e. w0 = w0 (z), v = v(z), = (z). Rigurdando la trave come un solido tridimensionale, possibile calcolare lo spostamento di un generico punto della sezione retta della trave. La sezione retta subisce uno spostamento u1 nullo lungo lasse x, uno spostamento u2 pari a v lungo lasse y ed uno spostamento u3 lungo lasse z che si ottiene come somma delleetto di w0 , spostamento lungo z in corrispondenza dellasse della trave, e di rotazione della sezione: u1 = 0 u2 = v u3 = w0 + y1
(3.10)
Timoshenko, Stephen (potovka 1878-Wuppertal 1972), ingegnere russo naturalizzato statunitense. Professore al Politecnico di Kijev (1907-11), alla Scuola di ponti e strade di Pietroburgo (1912-18), si rec successivamente negli USA dove insegn meccanica teorica e applicata nelle universit
3.3. MODELLO DI TRAVE DI TIMOSHENKO
37
Deformazione dovuta alleffetto flessionale z vF F= -vF -vF
+y Deformazione dovuta alleffetto di taglio z vT y Deformazione totale della trave z v =0
==F= -vF ? -v
-v y
Figura 3.1: Cinematica della trave.
38
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
Le funzioni che deniscono la cinematica della trave dipendono dallascissa z, i.e. w0 = w0 (z), v = v(z), = (z). Sulla base della cinematica introdotta tramite le espressioni (3.10), possibile determinare lo stato deformativo della trave. Infatti, le componenti non nulle del tensore di deformazione valgono: u3 0 = w0 + y0 = 0 + y c z u2 u3 + = v0 + = 2 yz = z y = z = (3.11)
dove lapice 0 indica la derivazione rispetto a z, 0 la dilatazione lineare dellasse della trave e c la curvatura essionale della trave.
3.3.2
Equazioni di equilibrio
Si assume che la trave T sia soggetta ad un sistema piano di sollecitazioni: forze agenti nel piano yz, coppie lungo lasse x. Le equazioni di equilibrio della trave sono: traslazione lungo lasse z N 0 = f traslazione lungo lasse y T 0 = q rotazione intorno allasse x M0 = T (3.14) (3.13) (3.12)
Le equazioni (3.12), (3.13) e (3.14) sono le equazioni di equilibrio locale della trave, dette anche equazioni indenite di equilibrio della trave.
3.3.3
Legame costitutivo
Note che siano le deformazioni del solido trave, possibile determinare le tensioni presenti in esso utilizzando le equazioni del legame costitutivo. Infatti, si ottiene: = E = G (3.15)
dove E il modulo elastico lonitudinale, modulo di Young, e G il modulo a taglio.
3.3. MODELLO DI TRAVE DI TIMOSHENKO
39
Una volta denite le tensioni nel generico punto della sezione retta della trave tramite le relazioni (3.15), possibile determinare le equazioni costitutive della trave. Infatti, lo sforzo normale ed il momento ettente si calcolano come la risultante ed il momento risultante delle tensioni normali sulla sezione, mentre il taglio si calcola come la risultamte delle tensioni tangenziali. Z Z Z N= dA M= y dA T = dA (3.16)A A A
Sostituendo nelle due equazioni (3.16) la relazione costitutiva (3.15), si ottiene: N= Z E dA M= Z y E dA T = Z G dA (3.17)
A
A
A
Ricordando poi la relazione (??), si ha: N= Z E (0 + y c) dA = Z (E 0 + Ey c) dA = EA 0 + ES c = EA 0 (3.18)
A
A
M=
Z
yE (0 + y c) dA =
A
Z
A
Ey 0 + Ey 2 c dA = ES 0e + EI c = EI c (3.19) Z G dA = GAs dA (3.20)A
T =
essendo S il momemnto statico rispetto allasse x, che risulta nullo poich x baricentrico, I il momento dinerzia rispetto allasse x ed inoltre 0 e c la deformazione assiale e la curvatura della trave. Si evidennzia che nellequazione (3.20) sia G che sono costanti nella sezione retta della trave, per cui integrando dovrebbe comparire larea A della sezione al posto della quantit As . In realt, come si chiarir successivamente, il modello proposto da Timoshenko non fornisce un prolo delle tensioni tangenziali accurato tramite la seconda delle formule (3.15), per cui necessario introdurre un coeciente di correzione a taglio nellespressione della risultante. Ci equivale a considerare unarea a taglio As = A. Le equazioni (3.18), (3.19) e (3.20) rappresentano le relazioni costitutive globali della trave che legano gli enti cinematici deformazione elastica assiale 0 , curvatura c e scorrimento angolare agli enti statici sforzo normale N, momento ettente M e taglio T.
3.3.4
Equazione della linea elastica
In denitiva, le equazioni che governano il problema della trave sono le seguenti:
40
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO) congruenza0 0 = w0 c = 0 = v0 +
(3.21) (3.22) (3.23)
equilibrio N 0 = f M 00 = q M0 = T legame costitutivo N = EA 0 M = EI c T = GAs Tenendo conto delle eqauzioni (3.21) e (3.27), la (3.24) fornisce:0 [EA w0 ] = f 0
(3.24) (3.25) (3.26)
(3.27) (3.28) (3.29)
(3.30)
Analogamente, tenendo conto delle equazioni (3.22), (3.23) e (3.28), (??), le equazioni di equilibrio (3.25) e (3.26) forniscono: [EI 0 ] = q 0 [EI 0 ] = GAs (v 0 + )00
(3.31) (3.32)
Le equazioni dierenziali (3.30), (3.31) e (3.32) rappresentano le equazioni del problema dellequilibrio elastico della trave soggetta a sforzo normale ed a momento ettente, dette anche equazioni della linea elastica. Si evidenzia che tali equazioni sono completamente disaccoppiate; infatti il problema assiale si pu risolvere tramite la (3.30) ignorando completamente il problema essionale; analogamente, il problema essionale si pu risolvere tramite la (3.31) ignorando completamente il problema assiale. Problema assiale Assumendo EA costante, il comportamento assiale della trave governato dallequazione: 00 EA w0 = f (3.33)
3.3. MODELLO DI TRAVE DI TIMOSHENKO la cui soluzione, nel caso di carico assiale uniformemente distribuito f costante, : w0 = f 2 z + a1 z + a2 2EA f 0 z + a1 0 = w0 = EA N = EA 0 = f z + EA a1
41
(3.34)
dove a1 ed a2 sono costanti di integrazione che si determinano tramite opportune condizioni al contorno. Problema essionale Assumendo EA ed EAs costanti, il comportamento essionale della trave governato dalle equazioni: EI 000 = q EI 00 = GAs (v 0 + ) (3.35) (3.36)
Nel caso di carico uniformemente distribuito q costante, integrando la (3.35) si ottiene: = q 3 z + b1 z 2 + b2 z + b3 6EI (3.37)
che sostituita nella (3.36) fornisce: v0 = EI 00 GAs q 3 EI q 2 z + b1 z + b1 z + b2 z + b3 = GAs EI 6EI (3.38)
Integrando lequazione dierenziale (3.38) si ottiene: q 2 EI q 1 3 1 2 4 v= z + b1 z z + b1 z + b2 z + b3 z + b4 GAs 2EI 24EI 3 2 Ne consegue che: q 2 z + b1 z + b2 3EI 1 M = EI c = q z 2 + EI (b1 z + b2 ) 3 EI 00 EI q = (v 0 + ) = z + b1 = GAs GAs EI T = GAs = q z + EI b1 c = 0 =
(3.39)
(3.40)
Le quantit b1 , b2 , b3 , e b4 sono costanti di integrazione che si determinano tramite opportune condizioni al contorno.
42
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
3.3.5
Fattore di correzione a taglio
Sulla base della seconda delle (3.15), tenendo conto dellequazione (3.11), le tensioni tangenziali presentano un andamento costante nella sezione retta della trave. Ne consegue che, per la simmetria delle tensioni tangenziali, si hanno irrealisticamente tensioni diverse da zero sullestradosso e sullintradosso della trave. Al contrario le tensioni tangenziali derivate tramite la formula di Jourawsky, ovvero tramite una condizione di equilibrio, sono nulle allintradosso ed allestradosso della trave, presentando un prolo certamente pi accurato. In denitiva, le tensioni tangenziali possono essere valutate in due modi dierenti: dalla cinematica applicando il legame costitutivo: =G dalla formula di Jourawsky T s (3.42) Ib con la (3.42) che fornisce un prolo delle tensioni tangenziali molto pi soddisfacente di quanto ottenuto tramite la (3.41). Valutando il lavoro virtuale interno di sezione tramite la formula (3.41) e la formula (3.42), si ha: Z Z 1 Lvi = dA = (3.43) dA = A A A Z Z 2 s T s s T J dA = dA Lvi = 2 GI A b A I b G I b J = (3.44) (3.41)
Eguagliando i lavori virtuali ottenuti si ha: Z 2 s T dA = 2 GI A b ovvero Z 2 s T dA G= 2 I A b e quindi, per la (3.29), si ha: Z 2 T s T = 2 dA As I A b Ricordando che As = A, si ottiene: = I2 R s 2A b
(3.45)
(3.46)
A
dA
3.3. MODELLO DI TRAVE DI TIMOSHENKO
43
F A B
Figura 3.2: Mensola caricata con una forza F sullestremo libero
3.3.6
Esercizio 1
Si consideri la trave isostatica riportata in gura 3.2. In particolare, si aronta esclusivamente il problema essionale, trascurando laspetto assiale. La soluzione generale fornita dalle espressioni: = b1 z 2 + b2 z + b3 EI 1 3 1 2 v = b1 z b1 z + b2 z + b3 z + b4 GAs 3 2 M = EI (b1 z + b2 ) T = EI b1 Le costanti di integrazione si determinano imponendo condizioni al contorno di tipo sia statico che cinamatico. In particolare si ha: Nodo A: sono nulli i valori dello spostamento trasversale e della rotazione, v(0) = 0 (0) = 0 b4 = 0 b3 = 0
ed inoltre:
Nodo B: sono noti entrambi gli enti statici M(l) = 0 T (l) = F F EI
EI (b1 l + b2 ) = 0 EI b1 = F
Risolvendo si ottiene: b1 = e quindi F 2 z lz EI F 1 3 1 2 F z lz z v = GAs EI 3 2 M = F (z l) T = F = C2 = Fl EI C3 = 0 C4 = 0
44
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
Figura 3.3: Schema della struttura dellesercizio 2.
3.3.7
Esercizio 2
Si determini la soluzione della struttura in gura 3.3 utilizzando lequazione della linea elastica. La struttura si compone di 3 tratti, per ognuno di questi tratti si scrivono le equazioni dierenziali della linea elastica. Si noti che nel secondo tratto presente una distorsione termica a farfalla, per cui la curvatura essionale totale si ottiene come somma della curvatura elastica e di quella termina: c = 0 = ce + ct dove ce = M EI ct = 2 T h
con coeciente di variazione termica ed h altezza della sezione della trave. La soluzione per ogni tratto assume la forma: primo tratto da A a B, sistema di riferimento z1 con origine in A2 1 = b1 z1 + b2 z1 + b3 EI 1 3 1 2 b1 z + b2 z + b3 z1 + b4 v1 = b1 z1 GAs 3 1 2 1 M1 = EI (b1 z1 + b2 ) T1 = EI b1
3.3. MODELLO DI TRAVE DI TIMOSHENKO secondo tratto da B a C, sistema di riferimento z2 con origine in B2 2 = c1 z2 + c2 z2 + c3 EI 1 3 1 2 c1 z + c2 z + c3 z2 + c4 v2 = c1 z2 GAs 3 2 2 2 2 T M2 = EI (c1 z2 + c2 ) EI h T2 = EI c1
45
terzo tratto da C a D, sistema di riferimento z3 con origine in C q 3 2 z + d1 z3 + d2 z3 + d3 3 = 6EI 3 q 2 q EI 1 3 1 2 4 z + d1 z3 z + d1 z + d2 z + d3 z3 + d4 v3 = GAs 2EI 3 24EI 3 3 3 2 3 1 2 M3 = q z3 + EI (d1 z3 + d2 ) 3 T3 = q z3 + EI d1 Le costanti di integrazione b1 , b2 , b3 , b4 , c1 , c2 , c3 , c4 , d1 , d2 , d3 , d4 si determinano imponendo le opportune condizioni al contorno. Nodo A- nellincastro si devono scrivere 2 condizioni di tipo cinematico, la prima sugli spostamenti verticali, la seconda condizione sulle rotazioni: v1 (0) = 0 1 (0) = 0 Nodo B- in corrispondenza del carrello elastico in B si devono scrivere 4 condizioni al contorno, una sugli abbassamenti, una sulle rotazioni, una sul momento ettente ed una sul taglio: v1 (l) 1 (l) M1 (l) T1 (l) + kv1 (l) = = = = v2 (0) 2 (0) M2 (0) T2 (0)
dove k la rigidezza del vincolo elastico in B. Nodo C- per il vincolo in C devono essere scritte 4 equazioni: v2 (l) v3 (0) 2 (l) M2 (l) = = = = 0 0 3 (0) M3 (0)
46
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
Figura 3.4: Schema della struttura dellesercizio 3. Nodo D- in corrispondenza dellestremo libero si scrivono 2 equazioni: M3 (l) = 0 T3 (l) = 0 In denitiva si ottiene il seguente un sistema di 12 equazioni in 12 incognite. Lesercizio pu essere svolto anche per via numerica considerando i seguenti dati: E = 3000 MPa G = 12500 MPa k = 1500 N/mm ct = 0.00001 1/mm b = 100 mm h = 200 mm l = 3000 mm As = 5/6 A Nelle ultime pagine del capitolo riportato un programma in MAPLE per la risoluzione dellesercizio proposto.
3.3.8
Esercizio 3
Si determini la soluzione della struttura in gura 3.4 utlizzando lequazione della linea elastica. La struttura si compone di 4 tratti, per ognuno di questi tratti. primo tratto da A a B, sistema di riferimento z1 con origine in A2 1 = b1 z1 + b2 z1 + b3 EI 1 3 1 2 b1 z + b2 z + b3 z1 + b4 v1 = b1 z1 GAs 3 1 2 1 M1 = EI (b1 z1 + b2 ) T1 = EI b1
3.3. MODELLO DI TRAVE DI TIMOSHENKO secondo tratto da B a C, sistema di riferimento z2 con origine in B2 2 = c1 z2 + c2 z2 + c3 EI 1 3 1 2 v2 = c1 z2 c1 z + c2 z + c3 z2 + c4 GAs 3 2 2 2 2 T M2 = EI (c1 z2 + c2 ) EI h T2 = EI c1
47
terzo tratto da C a D, sistema di riferimento z3 con origine in C2 3 = d1 z3 + d2 z3 + d3 EI 1 3 1 2 v3 = d1 z3 d1 z + d2 z + d3 z3 + d4 GAs 3 3 2 3 M3 = EI (d1 z3 + d2 ) T3 = EI d1
quarto tratto da D a E, sistema di riferimento z4 con origine in D2 4 = e1 z4 + e2 z4 + e3 EI 1 3 1 2 v4 = e1 z4 e1 z + e2 z + e3 z4 + e4 GAs 3 4 2 4 M4 = EI (e1 z4 + e2 ) T4 = EI e1
Le costanti di integrazione b1 , b2 , b3 , b4 , c1 , c2 , c3 , c4 , d1 , d2 , d3 , d4 , e1 , e2 , e3 , e4 si determinano imponendo le opportune condizioni al contorno. Nodo A: v1 (0) = 0 1 (0) = 0 Nodo B: v1 (l) v2 (0) 1 (l) M1 (l) = = = = 0 0 2 (0) M2 (0)
48
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO) Nodo C: v2 (l) 2 (l) M2 (l) T2 (l) + kv2 (l) = = = = v3 (0) 3 (0) M3 (0) T3 (0)
dove k la rigidezza del vincolo elastico in C. Nodo D: v3 (l) 3 (l) M3 (l) T3 (l) Nodo E: M4 (l) = 0 T4 (l) = 0 In denitiva, esprimendo le rotazioni, i momenti ettenti ed i tagli in funzione delle derivate dellinessione dei singoli tratti, si ottiene un sistema di 16 equazioni che permette di determinare le 16 costanti di integrazione. = = = = v4 (0) 4 (0) M4 (0) T4 (0) + F
3.3. MODELLO DI TRAVE DI TIMOSHENKO
49
> restart: > with (linalg):Warning, the protected names norm and trace have been redefined and unprotected
> GAs:=eta*EI: > eqd1a:=EI*(diff(phi1(z),z$3))=0; eqd1b:=EI*(diff(phi1(z),z$2))=GAs*(diff(v1(z),z)+phi1(z)); disol1:=dsolve({eqd1a,eqd1b},{phi1(z),v1(z)}); 3 eqd1a := EI 3 1( z ) = 0 z 2 eqd1b := EI 2 1( z ) = EI v1( z ) + 1( z ) z z disol1 := { 1 _C2 z 1 1 1( z ) = _C2 z 2 + _C3 z + _C4, v1( z ) = _C2 z 3 _C3 z 2 _C4 z + _C1 2 6 2 }
> eqd2a:=EI*(diff(phi2(z),z$3))=0; eqd2b:=EI*(diff(phi2(z),z$2))=GAs*(diff(v2(z),z)+phi2(z)); disol2:=dsolve({eqd2a,eqd2b},{phi2(z),v2(z)}); 3 eqd2a := EI 3 2( z ) = 0 z 2 eqd2b := EI 2 2( z ) = EI v2( z ) + 2( z ) z z disol2 := { 1 _C2 z 1 1 2( z ) = _C2 z 2 + _C3 z + _C4, v2( z ) = _C2 z 3 _C3 z 2 _C4 z + _C1 2 6 2 }
> eqd3a:=EI*(diff(phi3(z),z$3))=-q; eqd3b:=EI*(diff(phi3(z),z$2))=GAs*(diff(v3(z),z)+phi3(z)); disol3:=dsolve({eqd3a,eqd3b},{phi3(z),v3(z)}); 3 eqd3a := EI 3 3( z ) = q z 2 eqd3b := EI 2 3( z ) = EI v3( z ) + 3( z ) z z 1 q z3 1 disol3 := 3( z ) = + _C2 z 2 + _C3 z + _C4, 6 EI 2
50
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)1 q z4 1 qz _C2 z 24 1 1 3 2 v3( z ) = + + _C2 z _C3 z _C4 z + _C1 EI 2 EI 6 2 2
> disol:=dsolve({eqd1a,eqd1b,eqd2a,eqd2b,eqd3a,eqd3b},{phi1(z),v1(z) ,phi2(z),v2(z),phi3(z),v3(z)}); _C4 z 1 1 disol := v1( z ) = _C4 z 3 _C5 z 2 _C6 z + _C1, 6 2 _C10 z 1 1 v2( z ) = _C10 z 3 _C11 z 2 _C12 z + _C2, 6 2 1 2( z ) = _C10 z 2 + _C11 z + _C12, 2 1 q z4 1 q z 2 _C7 z 24 1 1 v3( z ) = + + _C7 z 3 _C8 z 2 _C9 z + _C3, 2 EI 6 2 EI 1 q z3 1 1 2 2 3( z ) = + _C7 z + _C8 z + _C9, 1( z ) = _C4 z + _C5 z + _C6 6 EI 2 2 > vv1:=subs({_C1=c[1],_C2=c[2],_C3=c[3],_C4=c[4]},(subs(disol1, v1(z)))); ff1:=subs({_C1=c[1],_C2=c[2],_C3=c[3],_C4=c[4]},(subs(disol1,phi1( z)))); MM1:=EI*(diff(ff1,z)); TT1:=diff(MM1,z); c2 z 1 1 vv1 := c2 z 3 c3 z 2 c4 z + c1 6 2 ff1 := 1 c z2 + c3 z + c4 2 2
MM1 := EI ( c2 z + c3 ) TT1 := EI c2
> vv2:=subs({_C1=c[5],_C2=c[6],_C3=c[7],_C4=c[8]},(subs(disol2, v2(z)))); ff2:=subs({_C1=c[5],_C2=c[6],_C3=c[7],_C4=c[8]},(subs(disol2,phi2( z)))); MM2:=EI*(diff(ff2,z))-EI*ct; TT2:=diff(MM2,z); c6 z 1 1 vv2 := c6 z 3 c7 z 2 c8 z + c5 6 2 ff2 := 1 c z 2 + c7 z + c8 2 6
3.3. MODELLO DI TRAVE DI TIMOSHENKOMM2 := EI ( c6 z + c7 ) EI ct TT2 := EI c6
51
> vv3:=subs({_C1=c[9],_C2=c[10],_C3=c[11],_C4=c[12]},(subs(disol3, v3(z)))); ff3:=subs({_C1=c[9],_C2=c[10],_C3=c[11],_C4=c[12]},(subs(disol3,ph i3(z)))); MM3:=EI*(diff(ff3,z)); TT3:=diff(MM3,z); 1 4 2 c10 z 24 q z 1 qz 1 1 vv3 := + + c10 z 3 c11 z 2 c12 z + c9 2 EI 6 2 EIff3 := 1 q z3 1 + c z 2 + c11 z + c12 6 EI 2 10
1 q z2 MM3 := EI 2 EI + c10 z + c11 qz TT3 := EI EI + c10
> # sezione A cc[1]:=subs(z=0,vv1)=0; cc[2]:=subs(z=0,ff1)=0;cc1 := c1 = 0 cc2 := c4 = 0
> # sezione B cc[3]:=subs(z=l,vv1)-subs(z=l,vv2)=0; cc[4]:=subs(z=l,ff1)-subs(z=l,ff2)=0; cc[5]:=subs(z=l,MM1)-subs(z=l,MM2)=0; cc[6]:=subs(z=l,TT1)+k*subs(z=l,vv1)-subs(z=l,TT2)=0; c2 l 1 c6 l 1 1 1 cc3 := c2 l 3 c3 l 2 c4 l + c1 + c6 l 3 + c7 l 2 + c8 l c5 = 0 6 2 6 2 cc4 := 1 1 c2 l 2 + c3 l + c4 c6 l 2 c7 l c8 = 0 2 2
cc5 := EI ( c2 l + c3 ) EI ( c6 l + c7 ) + EI ct = 0
c2 l 1 1 3 2 cc6 := EI c2 + k 6 c2 l 2 c3 l c4 l + c1 EI c6 = 0 > # sezione C cc[7]:=subs(z=2*l,vv2)=0; cc[8]:=subs(z=2*l,vv3)=0;
52
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
cc[9]:=subs(z=2*l,ff2)-subs(z=2*l,ff3)=0; cc[10]:=subs(z=2*l,MM2)-subs(z=2*l,MM3)=0; c6 l 4 c l 3 2 c7 l 2 2 c8 l + c5 = 0 cc7 := 2 3 6cc8 := 2 ql + EI2
2 c10 l
2 4 ql 4 3 + c10 l 3 2 c11 l 2 2 c12 l + c9 = 0 EI 3
4 3 ql 3 cc9 := 2 c6 l 2 + 2 c7 l + c8 + 2 c10 l 2 2 c11 l c12 = 0 EI q l2 cc10 := EI ( 2 c6 l + c7 ) EI ct EI 2 + 2 c10 l + c11 = 0 EI
> # sezione D cc[11]:=subs(z=3*l,MM3)=0; cc[12]:=subs(z=3*l,TT3)=0; 9 q l2 cc11 := EI 2 EI + 3 c10 l + c11 = 0 ql cc12 := EI 3 + c10 = 0 EI
> ris:=solve({cc[1],cc[2],cc[3],cc[4],cc[5],cc[6],cc[7],cc[8],cc[9], cc[10],cc[11],cc[12]}, {c[1],c[2],c[3],c[4],c[5],c[6],c[7],c[8],c[9],c[10],c[11],c[12]}): > simplify(ris[1]); simplify(ris[2]); simplify(ris[3]); simplify(ris[4]); simplify(ris[5]); simplify(ris[6]); simplify(ris[7]); simplify(ris[8]); simplify(ris[9]); simplify(ris[10]); simplify(ris[11]); simplify(ris[12]); c9 = l 2 ( 144 q k l 204 q k l 3 + 122 q k l 5 2 288 q EI 312 q 2 EI l 2+ 19 l 7 3 q k + 240 l 4 3 q EI + 5 l 5 3 EI k ct + 120 l 2 3 EI 2 ct + 66 l 3 EI k 2 ct + 144 2 EI2 ct + 72 l EI k ct ) ( EI ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 ) )
3.3. MODELLO DI TRAVE DI TIMOSHENKO1 c7 = ( 11 l 7 2 k q + 48 l 4 2 EI q 10 l 5 2 EI k ct + 48 k q l 5 + 120 l 2 2 EI 2 ct 2 + 48 l 3 EI k ct + 72 l EI k ct + 144 EI 2 ct 36 l 3 k q 72 l 2 EI q ) ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 ) ) 1 c3 = l 2 ( q k l 5 2 48 q 2 EI l 2 6 l 3 EI k 2 ct 12 q k l 3 + 72 2 EI 2 ct 2 + 36 l EI k ct + 36 q k l + 72 q EI ) ( EI ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 ) ) c2 = 3 l ( 6 l 3 k q 6 l 3 EI k ct + k q l 5 24 l 2 EI q + 12 EI 2 ct ) 2 EI ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 ) c11 = 9 q l2 2 EI ql EI ( EI
53
c10 = 3
c1 = 0 c4 = 0 c6 = 3 l ( 3 k q l 5 24 l 2 EI q + 4 l 3 EI k ct 18 l 3 k q + 12 EI2 ct + 12 l EI k ct ) 2 EI ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 )
1 c8 = ( 6 l 7 2 k q l 5 2 EI k ct + 192 l 2 2 EI2 ct + 18 k q l 5 + 102 l 3 EI k ct 2 + 144 EI2 ct + 72 l EI k ct ) l3 5 2
( EI
( 36 k l + 60 k l + 7 k l + 72 EI + 96 2 EI l 2 ) ) 1 c12 = l ( 176 l 7 2 k q + 2352 l 4 2 EI q + 15 l 5 2 EI k ct + 1470 k q l 5 + 360 l 2 2 EI2 ct 6 + 198 l 3 EI k ct + 432 EI 2 ct + 216 l EI k ct + 720 l 3 k q + 1440 l 2 EI q ) ( 36 k l + 60 k l 3 + 7 k l 5 2 + 72 EI + 96 2 EI l 2 ) ) c5 = l 2 ( 3 k q l 5 + 42 l 3 EI k ct + 36 EI 2 ct 18 l 3 k q + 36 l EI k ct + l 7 2 k q + l 5 2 EI k ct + 48 l 2 2 EI 2 ct )3 5 2
( EI
( EI
( 36 k l + 60 k l + 7 k l + 72 EI + 96 2 EI l 2 ) )
54
CAPITOLO 3. DEFORMAZIONE A TAGLIO (PROF. ELIO SACCO)
Capitolo 5 TEOREMA DI BETTI E LINEE DI INFLUENZA (prof. Elio Sacco)5.1 Teorema di Betti
Siano S1 = {b1 , p1 , u1 } ed S2 = {b2 , p2 , u2 } due dierenti sistemi di sollecitazioni 1 agenti sul medesimo corpo e siano s = {u1 , 1 , 1 } ed s2 = {u2 , 2 , 2 } i due stati elastici soluzioni dei corrispondenti problemi dellequilibrio elastico. Betti1 dimostr che: Il lavoro L12 compiuto dal sistema di sollecitazione S1 per gli spostamenti u2 provocati da un secondo sistema di sollecitazione S2 uguale al lavoro L12 compiuto dal sistema S2 per gli spostamenti u1 provocati dal sistema S1 . In formula: R 1 2 R R b u dv+ f p1 u2 dA+ u 1 n u2 dA R 2 1 R R (5.1) = b u dv+ f p2 u1 dA+ u 2 n u1 dA
Il teorema di Betti si dimostra ricorrendo al principio dei lavori virtuali. Infatti, si ha: R R R L12 = b1 u2 dv+ f p1 u2 dA+ u 1 n u2 dA R 1 2 R R R 2 1 = R dv = C1 2 dv = C2 1 dv= dv (5.2) R R = b2 u1 dv+ f p2 u1 dA+ u 2 n u1 dA Si evidenzia che nella dimostrazione del teorema di Betti si utilizzata la propriet di simmetria maggiore del tensore elastico C, ovvero il materiale deve essere iperelastico.1
Enrico Betti (Pistoia 1823-Pisa 1892), matematico italiano. Professore dal 1867 allUniversit di Pisa, deputato (1862) e senatore (1884). Fondatore della scuola italiana di matematica, fu maestro di U. Dini, L. Bianchi, V. Volterra. Studi inizialmente problemi di algebra e la teoria delle funzioni ellittiche, svilupp e chiar la teoria delle equazioni di E. Galois dando dimostrazioni per risultati che vi erano solo enunciati. In seguito diede notevoli contributi anche alla sica matematica, in particolare alla teoria dellelasticit.
67
68CAPITOLO 5. TEOREMA DI BETTI E LINEE DI INFLUENZA (PROF. ELIO SACCO) Il teorema di Betti si pu dimostrare anche calcolando lenergia immagazzinata nel corpo . Infatti, si supponga che sia soggetto a due storie di carico: 1. agisce solo la sollecitazione S1 e successivamente agisce anche S2 , 2. agisce solo la sollecitazione S2 e successivamente agisce anche S1 . Facendo ricorso al teorema di Clapeyron, lenergia elastica calcolata nei due casi vale: i hR R R E 0 = 1 b1 u1 dv+ f p1 u1 dA+ u 1 n u1 dA 2 R R R 1 2 + b u dv + f p1 u2 dA + u 1 n u2 dA (5.3) hR i R R + 1 b2 u2 dv+ f p2 u2 dA+ u 2 n u2 dA 2 hR i R R E 00 = 1 b2 u2 dv+ f p2 u2 dA+ u 2 n u2 dA R R R2 2 1 + b u dv + f p2 u1 dA + u 2 n u1 dA (5.4) hR i R R + 1 b1 u1 dv+ f p1 u1 dA + u 1 n u1 dA 2
Poich il materiale che compone il corpo iperelastico, le due energie devono assumere lo stesso valore, da cui si deduce lequazione (5.1). Allo scopo di rendere pi evidente le espressioni (5.3) e (5.4), si considera una trave soggetta a due forze F1 ed F2 , come illustrato in gura 5.1.
F1
F2
F1 v1S1 agisce solo F1
F1 v1S1 v2S1
F2 agisce F1 ed F2 V2S2
Figura 5.1: Teorema di Betti.
5.2. TEOREMA DI BETTI GENERALIZZATO
69
Per eetto della forza F1 la sezione S1 subisce uno spostamento v1S1 . Lenergia elastica immagazzinata dal sistema, per il teorema di Clapeyron, vale: 1 0 E1 = F1 v1S1 2 (5.5)
Quindi, successivamente agisce la forza F2 . La sezione S1 subisce un ulteriore spostamento v2s1 , mentre la sezione S2 subisce lo spostamento v2s2 . Lenergia elastica immagazzinata dal sistema, per il teorema di Clapeyron, vale: 1 0 E2 = F1 v2S1 + F2 v2S2 2 (5.6)
Lenergia totale si determina sommando le quantit calcolate tramite le (5.5) e (5.6): 1 1 0 0 E 0 = E1 + E2 = F1 v1S1 + F1 v2S1 + F2 v2S2 2 2 Analogamente applicando prima la forza F2 e poi la forza F1 , lenergia vale: 1 1 E 00 = F2 v2S2 + F2 v1S2 + F1 v1S1 2 2 Da cui il teorema di Betti: E 0 = E 00 F1 v2S1 = F2 v1S2 (5.9) (5.8) (5.7)
5.2
Teorema di Betti generalizzato
Il teorema di Betti viene generalizzato considerando nei due sistemi di sollecitazioni S1 ed S2 agenti sul corpo anche delle possibili distorsioni 1 e 2 , cos che S1 = {b1 , p1 , u1 , 1 } ed S 2 = {b2 , p2 , u2 , 2 }. Come nel caso precedente siano s 1 = {u1 , 1 , 1 } 2 2 2 2 ed s = {u , , } i due stati elastici soluzioni dei corrispondenti problemi dellequilibrio elastico. Il lavoro virtuale che le forze del sistema S1 compiono per gli spostamenti dello stato elastico s2 , vale: R R R L12 = b1 u2 dv + f p1 u2 dA + u 1 n u2 dA 2 1 R R 1 2 (5.10) 1 = dv = C dv essendo 1 1 la deformazione elastica presente nello stato s1 . Analogamente, il lavoro virtuale che le forze del sistema S2 compiono per gli spostamenti dello stato elastico s1 , vale: R R R L21 = b2 u1 dv + f p2 u1 dA + u 2 n u1 dA 2 1 R R 2 1 (5.11) 2 = dv = C dv
70CAPITOLO 5. TEOREMA DI BETTI E LINEE DI INFLUENZA (PROF. ELIO SACCO) Sottraendo membro a membro le (5.10) e (5.11) si ottiene: R 1 2 R R b u dv + f p1 u2 dA + u 1 n u2 dA R 2 1 R R 2 1 2 b u dv f p u dA u n u1 dA 1 2 2 1 R R 1 2 = C dv C dv
(5.12)
Confrontando la (5.12) con la (5.13) si ottiene: R R R R 1 2 b u dv + f p1 u2 dA + u 1 n u2 dA C 1 1 2 dv R R R R = b2 u1 dv + f p2 u1 dA + u 2 n u1 dA C 2 2 1 dv che equivale a: R R R R 1 2 b u dv + f p1 u2 dA + u 1 n u2 dA 1 2 dv R R R R = b2 u1 dv + f p2 u1 dA + u 2 n u1 dA 2 1 dv
Sommando e sottraendo al secondo membro la stessa quantit si ha: R R C 1 1 2 dv C 2 2 1 dv R R R = R C1 2 dv R C2 1 dv + R C 2 1 dv 1 2 R C 1 dv + C1 R 2 dv C 2 dv 2 = C 1 1 dv C 2 2 1 dv
(5.13)
(5.14)
(5.15)
5.3
Linee di inuenza
Le linee di inuenza sono una particolare applicazione del teorema di Betti generalizzato al problema delle travature. Si consideri il caso in cui le il sistema di sollecitazione S1 consista in una forza applica F 1 ed una distorsione 1 , mentre il sistema S2 consista in una forza applica F 2 ed una distorsione 2 ; si consideri inoltre per la trave solo il problema essionale, per cui per spostamento si intende linessione v e per tensione il momento ettente M. Il teorema di Betti generalizzato (5.15) prende la forma: F 1 v 2 M 1 2 = F 2 v1 M 2 1 (5.16)
Per evidenziare lutilit del teorema di Betti generalizzato, nella forma espressa dalla (5.16), si consideri il problema di voler determinare lo spostamento v1 di una sezione A della trave, per eetto della forza F 1 = 1 applicata nella sezione B. A tale scopo si pone 1 =0. Inoltre, si pone F 2 = 1 applicata nella sezione A con 2 =0. La formula (5.16) si semplica in: v2 = v1 (5.17) In altri termini, spostamento v 1 della sezione A della trave per eetto della forza unitaria F 1 = 1 in B uguale allo spostamento v 2 provocato dalla forza unitaria F 2 =1
5.4. ESERCIZI SULLE LINEE DI INFLUENZA
71
applicata nella sezione A. Al variare della sezione B di applicazione della forza unitaria F 1 , il valore dello spostamento in A varia ed assume il valore dello spostamento che avviene nella sezione B dove applicata la forza F 1 . In denitiva, il diagramma dello spostamento in A provocato da una forza unitaria comunque posizionata lungo la linea dasse della trave uguale al diagramma dello spostamento provocato da una forza unitaria applicata nella sezione B. Tale diagramma viene comunemente indicato come la linea di inuenza dello spostamento in A dovuto ad una forza unitaria viaggiante. Applicando tale procedura a dierenti situazioni si possono determinare le linee di inuenza di varie grandezze, di notevole interesse applicativo. In generale, si assume il sistema S 1 come sistema eettivo in cui lente sollecitante sia mobile (ente viaggiante), ed il sistema S 2 come sistema ausiliario nel quale determinare il diagramma equivalente. 1. Determinare la linea dinuenza dello spostamento v 1 di una sezione A della trave, per eetto della forza viaggiante F 1 = 1. A tale scopo si pone 1 =0. Inoltre, si pone F 2 = 0 applicata nella sezione A con 2 =0. La formula (5.16) si semplica in: v2 = v1
(5.18)
La linea dinuenza dello spostamento v1 della sezione A della trave per eetto della forza unitaria viaggiante uguale allinessione v 2 provocato dalla forza unitaria F 2 applicata nella sezione A. 1. Determinare la linea dinuenza del momento ettente M 1 di una sezione A della trave, per eetto della forza viaggiante F 1 = 1. A tale scopo si pone 1 =0. Inoltre, si pone F 2 = 0 e 2 = 2 = 1 in A. La formula (5.16) si semplica in: v2 = M 1
(5.19)
La linea dinuenza del momento ettente M 1 della sezione A della trave per eetto della forza unitaria viaggiante uguale allinessione v 2 provocato dalla distorsione 2 = 2 = 1 applicata nella sezione A.
5.45.4.1
Esercizi sulle linee di inuenzaEsercizio 1
Si intende determinare la linea dinuenza dello spostamento della sezione A della trave riportata in gura 5.2, per eetto di una forza viaggiante.
72CAPITOLO 5. TEOREMA DI BETTI E LINEE DI INFLUENZA (PROF. ELIO SACCO)
F=1 A
L
L/2
L/2
Figura 5.2: Linea dinuenza dello spostamento per la trave continua.
1 A L L/2 L/2
Figura 5.3: Schema di calcolo della linea dinuenza. Sulla base dellequazione (5.18) il valore dello spostamento nella sezione A provocato dalla forza unitaria F uguale allo spostamento della sezione nella quale agisce la forza F per eetto di una forza unitaria applicata in corrispondenza della sezione A. Ne consegue che la linea dinuenza cercata fornita dalla deformata ottenuta nello schema riportato in gura 5.3. In gura 5.4 riportata la linea dinuenza desiderata ricavata sviluppando un programma in MAPLE, dando i seguenti valori numerici ai dati geometrici della trave oggetto di studio: I = 2004 mm4
E = 30000 MPa
L = 6000 mm
Nota: in gura 5.4 stato cambiato il segno della funzione nel plottaggio dellinflessione. Dalla soluzione derivata si deduce che per ottenere il massimo valore dello spostamento in A, la forza viaggiante deve assumere la posizione z = 2L. Lo spostamento minimo si ottiene ponendo la forza viaggiante allascissa che annulla la rotazione della prima campata.
5.4. ESERCIZI SULLE LINEE DI INFLUENZA
73
Figura 5.4: Linea dinuenza dello spostamento di una trave contnua per forza unitaria viaggiante (esercizio 1).
5.4.2
Esercizio 2
Per la trave considerata nellesercizio precedente si determini la linea dinluenza del momento ettente nella sezione A per eetto della forza unitaria viaggiante F = 1. Per lequazione (5.19), il valore del momento ettente nella sezione A provocato dalla forza unitaria F uguale allo spostamento della sezione nella quale agisce la forza F per eetto di una distorsione angolare = 1 applicata in corrispondenza della sezione A. In gura 5.5 riportata la linea dinuenza desiderata ricavata sviluppando un programma in MAPLE, dando gli valori numerici ai dati geometrici assegnati nellesercizio precedente. Nota: in gura 5.5 stato cambiato il segno della funzione nel plottaggio dellinflessione.
74CAPITOLO 5. TEOREMA DI BETTI E LINEE DI INFLUENZA (PROF. ELIO SACCO)
Figura 5.5: Linea dinuenza del momento ettente di una trave contnua per forza unitaria viaggiante (esercizio 2).
Capitolo 5 PRINCIPIO DEI LAVORI VIRTUALI (prof. Elio Sacco)Nei capitoli precedenti stato arontato lo studio dei continui deformabili prendendo in esame separatamente i due aspetti: quello cinematico e quello statico. Si pervenuti in tal modo alla denizione dei due aspetti fondamentali della congruenza e dellequilibrio per un corpo continuo1 .1 Bernoulli, famiglia di famosi matematici e scienziati originaria di Anversa, ma stabilitasi a Basilea verso la ne del sec. XVI. Tra i suoi membri meritano particolare citazione Jacques I, il fratello Jean I e il glio di questi Daniel I. Jacques (Basilea 1654-1705), professore di matematica allUniversit di Basilea, col fratello Jean svilupp ulteriormente il calcolo innitesimale, introdotto da Leibniz e Newton, indicandone numerose applicazioni alla meccanica e alla geometria in una serie di memorie apparse negli Acta Eruditorum. Tra esse particolarmente nota quella del 1690 in cui per primo sugger il nome di calculus integralis per quello che Leibniz aveva chiamato calculus summatorius, nome poi adottato dallo stesso Leibniz: in tale memoria Jacques applicava il calcolo allo studio della curva isocrona, una delle curve note no ad allora solo per via geometrica. Su altre curve furono estremamente chiaricatrici le memorie di Jacques; tra esse: la catenaria, che tanta importanza avr nella scienza delle costruzioni; la lemniscata, curva a forma di 8 o di nastro annodato (lemniscus) che da Bernoulli prese nome; la spirale logaritmica, di cui scopr la caratteristica propriet di riprodursi identicamente dopo ognuna di molte trasformazioni geometriche. Altri importanti contributi di Jacques allanalisi sono lo studio e la soluzione del problema degli isoperimetri; la soluzione del problema della brachistocrona, proposto dal fratello Jean, che costituisce un esempio di applicazione del calcolo variazionale; lintroduzione delle coordinate polari nella geometria analitica; lo studio della somma delle potenze dei numeri naturali per cui introdusse i numeri di Bernoulli. Jacques altres lautore del primo completo trattato di calcolo delle probabilit (Ars Coniectandi, Arte delle congetture), pubblicato postumo nel 1713 a cura del nipote Nicolas I e nel quale enunciata e dimostrata la legge dei grandi numeri, nota anche come teorema di Bernoulli. Jean (Basilea 1667-1748), fratello minore di Jacques, gli succedette alla cattedra di Basilea dopo aver insegnato a Groninga. Di carattere ambizioso, ebbe clamorose controversie per motivi di priorit con molti colleghi, compresi il fratello Jacques e il glio Daniel. Si interess di medicina, chimica e astronomia, oltre che di analisi matematica, e contribu a diondere il nuovo calcolo anche attraverso la sua corrispondenza con i pi grandi matematici europei. Il suo ricchissimo epistolario ore un quadro straordinario dellattivit scientica allalba del sec. XVIII. Tra i suoi allievi vi furono Eulero
73
74
CAPITOLO 5. PRINCIPIO DEI LAVORI VIRTUALI (PROF. ELIO SACCO)
A questo punto, sulla base delle sole condizioni di congruenza e dequilibrio, possibile formulare una relazione di grande generalit, assai importante nella Meccanica dei continui deformabili, detta Identit Fondamentale della Meccanica, o pi spesso Principio dei Lavori Virtuali (PLV). Il Principio dei Lavori Virtuali costituisce il legame fondamentale tra la condizione dequilibrio e quella di congruenza consentendo di mettere in luce le caratteristiche di dualit tra lequilibrio e la congruenza, dualit che costituisce una circostanza di notevole rilievo dal punto di vista applicativo.
5.1
Identit fondamentale della meccanica
Lenunciato dellIdentit Fondamentale della Meccanica o Principio dei Lavori Virtuali il seguente: in un sistema deformabile in equilibrio, il lavoro virtuale esterno (Lve ) uguale a quello interno (Lvi ) per qualunque insieme di spostamenti virtuali (innitesimi) compatibili con la continuit del corpo. Tale aermazione si dimostra come segue. Si consideri un corpo con frontiera = f u con f u = . Siano assegnate le forze di volume b in , le forze b b di supercie p su f , e gli spostamenti u su u . Si suppone che tutte le forze attive e reattive agenti sul corpo soddisno le equazioni cardinali della statica: 0 = p dA + n dA u Z Z Z 0 = x b dV + x p dA + x n dA f f u
Z
b dV +
Z
Z
e il marchese de LHospital, autore, sulla base di lettere e annotazioni di Jean, del primo completo trattato di calcolo innitesimale (1696). Come il fratello Jacques, si occup di molti problemi celebri del suo tempo, tra i quali lo studio dellequazione dierenziale, nota come equazione di Bernoulli, di cui nel 1697 pubblic un metodo di risoluzione; inoltre il suo studio sulle funzioni esponenziali e sui loro rapporti con i logaritmi, che verr completato da Eulero, lo fanno ritenere il fondatore di tale argomento. Daniel I (Groninga 1700-Basilea 1782), glio di Jean, fu amico di Eulero; insegn matematica a Pietroburgo (1725-33) e successivamente botanica, anatomia e sica a Basilea. La sua opera comprende numerosi studi sul calcolo delle probabilit, che applic a problemi di economia, medicina e astronomia. Si occup inoltre di sica-matematica studiando il problema delle corde vibranti, assai dibattuto in quei tempi (completamente risolto poi da dAlembert), ed espose i primi principi della teoria cinetica dei gas. Il suo nome rimane essenzialmente legato agli studi di idrodinamica, alla cui base il teorema sulla conservazione dellenergia nel moto dei uidi, pubblicato nellopera Hydrodynamica, sive de viribus et motibus uidorum commentarii (1738; Idrodinamica, ovvero commentari intorno alle forze e ai moti dei uidi).
5.1. IDENTIT FONDAMENTALE DELLA MECCANICA ed inoltre che le tensioni soddisno le equazioni di equilibrio (4.26): div + b = 0 n = p in su f
75
(5.1)
avendo implicitamente inteso che un tensore simmetrico. Si assegni inoltre un campo di spostamenti u congruente con un campo di deformazioni , ovvero si suppone che le deformazioni soddisno lequazione di congruenza: 2 = u + uT b u = u in su u (5.2)
Si evidenzia che non stata supposta alcuna relazione tra il sistema di forze ed il campo di spostamenti. In altri termini, il sistema delle forze e quello degli spostamenti non sono legati fra loro da alcun nesso di tipo causa-eetto. Il lavoro virtuale delle forze applicate con gli spostamenti considerati vale: Z Z Z b u dV + p u dA + n u dA (5.3) Lve = f u Z Z Z = bi ui dV + pi ui dA + ij nj ui dA f u
Tenendo presente le equazioni di equilibrio (5.1), si ha: Z Z Z Z ij,j ui dV + ij nj ui dA = ij,j ui dV + ij ui nj dA Lve = Z Z Z h i = ( ij ui ),j ij,j ui dV ij,j ui dV + ( ij ui ),j dV = Z Z = [ ij,j ui + ij ui,j ij,j ui ] dV = ij ui,j dV = Z Z Z = ij (u)ij dV = ij ( + W)ij dV = ij ij dV
= Lvi
In denitiva, si deduce che: Z Z Lve = Lvi b u dV +
f
p u dA +
Z
u
n u dA =
Z
dV (5.4)
Si evidenzia che sia nellenunciato che nella dimostrazione, il PLV indipendente dalle propriet meccaniche del materiale ed dunque valido per qualunque mezzo continuo deformabile indipendentemente dalla sua natura.
76
CAPITOLO 5. PRINCIPIO DEI LAVORI VIRTUALI (PROF. ELIO SACCO)
d
P1
P2
P3
FFigura 5.1: Corpo rigido vincolato tramite 3 molle elastiche verticali. In particolare, per moti rigidi il PLV si riformula nel modo seguente: il lavoro virtuale esterno (Lve ) compiuto da un sistema di forze in equilibrio per un qualunque spostamento rigido innitesimo del corpo sul quale agiscono tali forze identicamente nullo. Infatti, essendo il moto rigido, deve accadere che il tensore di deformazione sia nullo in ogni punto del corpo, i.e. = 0. Ne consegue che il lavoro virtuale interno nullo, i.e. Lvi = 0. Dallidentit fondamentale (5.4) se ne ricava Lve = 0.
5.1.1
Esempio
Si consideri il corpo rigido mostrato in gura 5.1 soggetto ad una forza verticale F , vincolato tramite 3 molle parallele e verticali, e da un carrello orizzontale. Gli spostamenti congruenti del corpo rigido sono quelli di traslazione verticale v e di rotazione intorno al punto medio del corpo. Gli spostamenti dei punti P1 , P2 e P3 rispettivamente valgono: v1 = v a v2 = v v3 = v + a
(5.5)
essendo a la distanza tra le molle. Si evidenzia che le quantit v1 , v2 e v3 rappresentano gli allungamenti delle molle elastiche, ovvero delle deformazioni. Le equazioni di equilibrio alla traslazione verticale ed alla rotazione intorno a P2 in
5.2. PRINCIPIO DEGLI SPOSTAMENTI VIRTUALI esplicito assumono la forma: F = F1 + F2 + F3 M = F1 a + F3 a
77
(5.6)
avendo indicato con Fi i = 1, 2, 3 la forza esercitata sul punto Pi dalla iesima molla, e con M = F d. Si evidenzia che Fi rappresenta una tensione interna ed intesa diretta verso lalto. Per il semplice sistema considerato, il lavoro virtuale delle forze applicate con gli spostamenti considerati vale: Lve = F v + M (5.7) Tenuto conto delle equazioni di equilibrio, lespressione (5.7) assume la forma: Lve = = = = (F1 + F2 + F3 ) v + (F1 a + F3 a) F1 (v a ) + F2 (v) + F3 (v + a ) F1 v1 + F2 v2 + F3 v3 Lvi (5.8)
Per il semplice problema considerato resta allora vericata lIdentit Fondamentale della Meccanica, ovvero il lavoro virtuale esterno eguaglia il lavoro virtuale interno.
5.2
Principio degli spostamenti virtuali
Di denisce variazione di spostamento ammissibile u la dierenza tra due qualsiasi spostamenti ammissibili, e.g. u e v: u: v: e quindi: u = v u : 2 = u + uT 2 = v + vT , , b u = u su u b v = u su u , u = 0 su u
2 = 2( ) = u + uT
comunque presi u e congruenti.
b Condizione necessaria e suciente anch b, p e siano in equilibrio che Z Z Z b b u dV + dV = Lvi (5.9) p u dA = Lve = f
b Necessariet. Se b, p e sono in equilibrio e u, sono congruenti allora vale lequazione (5.9). La dimostrazione segue immediatamente applicando lidentit fondamentale della meccanica (5.4) per il campo di spostamenti congruenti u.
78
CAPITOLO 5. PRINCIPIO DEI LAVORI VIRTUALI (PROF. ELIO SACCO)
b Sucienza. Se vale lequazione (5.9) per ogni possibile u, congruenti allora b, p e sono in equilibrio. Per dimostrarlo, si consideri inizialmente il lavoro virtuale interno: Lvi = Z dV =
=
Z
u dV Z div u dV + n u dA f
Z
che dovendo essere per ipotesi uguale al lavoro virtuale esterno, per la (5.9) conduce allespressione: Z Z (div + b) u dV + (b n) u dA = 0 p f
che, per larbitrariet di u, fornisce le equazioni di equilibrio: div + b = 0 b n = p in su f
5.2.1
Esempio
Si consideri ancora il corpo rigido mostrato in gura 5.1. Le deformazioni congruenti v1 , v2 e v3 con i parametri di spostamento v e sono denite dalle relazioni (5.5). I lavori virtuali esterno ed interno, tenuto conto delle equazioni di congruenza (5.5), valgono rispettivamente: Lve = F v + M Lvi = F1 (v a ) + F2 (v) + F3 (v + a ) Si impone ora valido il principio dei lavori virtuali ovvero: Lve = Lvi da cui ne consegue: F v + M = F1 (v a ) + F2 (v) + F3 (v + a ) che dovendo valere per ogni possibile valore di v e di , fornisce le equazioni di equilibrio alla traslazione verticale ed alla rotazione intorno a P2 : F = F1 + F2 + F3 M = F1 a + F3 a (5.10)
In denitiva, assicurata la congruenza delle deformazioni, il principio degli spostamenti virtuali fornisce le giuste equazioni di equilibrio.
5.3. PRINCIPIO DELLE FORZE VIRTUALI
79
5.3
Principio delle forze virtuali
Si denisce variazione di forze e tensioni ammissibile b, b e , la dierenza tra due p b b qualsiasi sistemi di forze e tensioni in equilibrio, e.g. b, p, e f, q, S: e quindi: b b, p, : b f, q, S : div + b = 0 , divS + f = 0 , b n = p su f b Sn = q su f
Condizione necessaria e suciente anch u ed siano congruenti che: Z Z Z b Lve = b u dV + b u dA + p n u dA f u Z = dV = Lvi
b = f b b = q p : p b b = S
div + b = 0 ,
n = b su f p
(5.11)
comunque presi b, b e in equilibrio. p Necessariet. Se u, sono congruenti e b, b e sono in equilibrio allora vale p lequazione (5.11). La dimostrazione segue immediatamente applicando lidentit fondamentale della meccanica (5.4) per il campo di forze e tensioni in equilibrio b, b e . p Sucienza. Se vale lequazione (5.11) per ogni possibile b, b e in equilibrio p allora u ed sono congruenti. Per dimostrarlo, si consideri inizialmente il lavoro virtuale esterno: Z Z Z
Lve =
b b u dV + b u dA + p n u dA f u Z Z Z b = div u dV + n u dA + n u dA f u Z Z u dV n u dA = Z Z b + n u dA + n u dA f u Z Z u dV + n (b u) dA u = u
80
CAPITOLO 5. PRINCIPIO DEI LAVORI VIRTUALI (PROF. ELIO SACCO) che dovendo essere per ipotesi uguale al lavoro virtuale interno, per la (5.11) conduce allespressione: Z Z 1 n (b u) dA + u (u + uT 2) dV = 0 2 u che, per larbitrariet di equilibrato con b e b, fornisce le equazioni di p congruenza: 2 = u + uT in b u=u su u
5.3.1
Esempio
Si consideri ancora il corpo rigido mostrato in gura 5.1. Le tensioni interne F1 , F2 ed F3 in equilibrio con le forze esterne F ed M soddisfano lequazione (5.6), per si ha: F2 = F 2F3 + M/a F1 = F3 M/a I lavori virtuali esterno ed interno valgono rispettivamente: Lve = F v + M Lvi = F1 v1 + F2 v2 + F3 v3 = (F3 M/a) v1 + (F + M/a 2F3 ) v2 + F3 v3 = F v2 + M (v2 v1 ) /a + F3 (v1 + v3 2v2 ) Eguagliando il lavoro virtuale esterno con quello interno si ottiene: F v + M = F3 (v1 + v3 2v2 ) M (v1 + v2 ) /a + F v2 che dovendo essere valida per ogni possibile valore di F ed M, fornisce: 0 = (v1 + v3 2v2 ) v = v2 = (v1 + v2 ) /a Risolvendo il sistema (5.14) rispetto alle incognite v1 , v2 e v3 si ha: v1 = v a v2 = v v3 = v + a (5.14) (5.13) (5.12)
(5.15)
che rappresentano le equazioni di congruenza del semplice sistema meccanico considerato. In denitiva, assicurato lequilibrio delle tensioni con le forze esterne, il principio delle forze virtuali fornisce le giuste equazioni di congruenza.
Capitolo 6 STABILITA DELLEQUILIBRIO ELASTICO (prof. Elio Sacco)6.1 Sistemi articolati rigidi
Si consideri una mensola rigida vincolata tramite un supporto elastico di rigidezza k, soggetta a carico assiale F , come illustrato in gura 6.1. Lequazione di equilibrio pu essere scritta nella congurazione indeformata ovvero in quella deformata caratterizzata da una rotazione della trave. Nel secondo caso il vincolo elastico reagisce con un momento proporzionale tramite k alla rotazione ; in tal caso lequazione di equilibrio si scrive come: k F L sin = 0 (6.1)
Risolvendo lequazione (6.1) rispetto alla forza adimesionalizzata f = F L/k, si ottiene: f= F L = k sin (6.2)
In gura 6.2 riportato il percorso di equilibrio per la mensola. Si evidenzia che per f l 1 la mensola in equilibrio per la sola congurazione denita da = 0, ovvero per la conguazione indeformata. Per f > 1, nellintervallo /2 < < /2, per la trave sono possibili 3 congurazioni di equilibrio: > 0, < 0, = 0. Per f = 1 si ha un punto di biforcazione dellequilibrio; il valore della forza per la quale si ha biforcazione dellequilibrio generalmente denito carico critico. Lequazione di equilibrio (6.1) si pu anche ottenere come condizione di stazionariet dellenergia potenziale totale, che nel caso in esame vale: 1 () = k 2 F L (1 cos ) 2 75 (6.3)
76CAPITOLO 6. STABILITA DELLEQUILIBRIO ELASTICO (PROF. ELIO SACCO)
k F
F
L
F
F
M
L (1-cos) L sin
F
Figura 6.1: Mensola soggetta a carico assiale.
Figura 6.2: Percorso di equibrio della mensola caricata assialmente
6.1. SISTEMI ARTICOLATI RIGIDI
77
dove il primo termine rappresenta lenergia elastica del vincolo ed il secondo il potenziale dei carichi. Imponendo la condizione di stazionariet si ottiene: 0= = k F L sin (6.4)
Indagando inoltre sulla derivata seconda dellenergia possibile stabilire la qualit dellequilibrio: 2 >0 2 2 0 2 lequilibrio stabile. 2. f = F L/k > 1 con = 0; in tal caso si ha 2 =kF L 1 con / sin = f. 3. f = F L/k > 1 con / sin = f ; in tal caso si ha 2 k L cos = k = k F L cos = k 2 L sin
Landamento della derivata seconda dellenergia potenziale totale illustato in gura 6.3. In realt nella maggior parte delle applicazioni tecniche di fondamentale importanza determinare esclusivamente il valore del carico critico ovvero dela carico di biforcazione dellequilibrio, mentre risulta spesso poco interessante e particolarmente complesso denire tutti i percorsi di equilibrio post-critici. Allo scopo di determinare il carico critico si pu svolgere unanalisi considerando congurazioni molto vicine a quella indeformata. Con tale ne, si sviluppano in serie Taylor le funzioni trigonometriche no al secondo ordine: sin = 2
1
tan
>0
(6.9)
(6.10)
2 Sostituendo le espressioni (6.10) nellenergia potenziale totale (6.3), si ottiene: cos = 1 2 1 2 () = k F L 2 2 (6.11)
6.1. SISTEMI ARTICOLATI RIGIDI
79
1 2 1
3 2
F
Figura 6.4: Imponendo la stazionariet dellenergia potenziale nella sua forma approssimata (6.11) si perviene allequazione: 0= = k F L (6.12) che risolta assumendo 6= 0 fornisce il valore del carico critico: k F = (6.13) L Si consideri ora la trave continua rappresentata in gura 6.4, costituita da tratti rigidi connessi tra loro tramite elementi elastici concentrati. Lenergia potenziale totale apprissimata al secondo ordine vale: 1 1 2 2 2 = k 2 + k 2 F L 1 F L 2 F L 3 1 2 2 2 2 2 2 dove 1 , 2 e 3 si calcolano in funzione di 1 e 2 . In particolare, si ha: 3 = 1 + 2 1 = 1 2 2 = 2 + 3 = 1 + 22 Lenergia (6.14) diventa allora: 2 (1 + 2 )2 1 1 2 2 2 1 2 (1 , 2 ) = k (1 2 ) + k (1 + 22 ) F L F L F L 2 2 2 2 2 (6.16) La condizione di stazionariet dellenergia potenziale totale (6.16) conduce alle equazioni: = k (1 2 ) + k (1 + 22 ) F L1 F L (1 + 2 ) (6.17) 1 = 2 (k F L) 1 + (k F L) 2 0 = = k (1 2 ) + 2k (1 + 22 ) F L2 F L (1 + 2 ) 2 = (k F L) 1 + (5k 2F L) 2 0 = (6.14)
(6.15)
80CAPITOLO 6. STABILITA DELLEQUILIBRIO ELASTICO (PROF. ELIO SACCO) ovvero, in forma matriciale 1 2 (k F L) k F L 0 = k F L 5k 2F L 0 2
(6.18)
Il sistema di equazioni (6.18) risulta omogeneo; per avere una soluzione diversa dalla banale, corrispondente a quella di trave indeformata, si deve imporre che il determinante sia uguale a zero: 2 (k F L) k F L = 9 k2 12 k F L + 3 F 2 L2 = 0 det (6.19) k F L 5k 2F L che risolta rispetto a F fornisce i seguenti due valori: F1 = k L , F2 = 3 k L (6.20)
Sostituendo il valore F = F1 nella seconda delle equazioni (6.17), si ottiene: L) 0 =(k F1 L) 1 + (5k 2F1 2 k k = k L L 1 + 5k 2 L L 2 = 3k2 = 1 6= 0 , 2 = 0 (6.21)
Analogamente, sostituendo il valore F = F2 sempre nella seconda delle equazioni (6.17), si ottiene: 0 =(k F2 L) 1 + (5k 2F2 L) 2 k k = k 3 L L 1 + 5k 6 L L 2 = 2k 1 k L 2 = 1 = 2 /2 (6.22)
Le forme delle deformate corrispondenti ai due valori del carico critico determinati sono riportati schematicamente in gura 6.5. Se ne deduce allora che in corrispondenza del valore del carico critico F1 < F2 la congurazione di equilibrio non banale una qualsiasi proporzionale alla prima di quelle riportate in gura 6.5. Mentre in corrispondenza del valore del carico critico F2 > F1 la congurazione di equilibrio non banale una qualsiasi proporzionale alla seconda di quelle riportate in gura 6.5.
6.2
Travi con elasticit diusa
Si consideri una trave soggetta a carico assiale in equilibrio in una congurazione deformata. Le equazioni di equilibrio del tratto di trave di lunghezza dz nella congurazione deformata, schematicamente illustrato in gura 6.6, forniscono: T0 = 0 M 0 N v0 = T (6.23)
6.2. TRAVI CON ELASTICIT DIFFUSA
81
1 2=0
3
F1
3 1 2=21Figura 6.5: g5_sta essendo F = N. Nellipot




![AIAS 2013 - 247 STUDIO NUMERICO-SPERIMENTALE DI … · rottura σr=60 MPa, è stato realizzato un laminato quasi isotropo [0/±45/90] s mediante laminazione manuale e sacco a vuoto.](https://static.fdocument.org/doc/165x107/5c6d222509d3f21b2e8ba40d/aias-2013-247-studio-numerico-sperimentale-di-rottura-r60-mpa-e-stato.jpg)

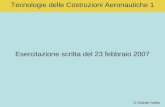

![Tecnica Delle Costruzioni 2 08 09.ppt [modalità compatibilità] pdf/Work/Corsi/TECNICA DELLE... · • Se si assume nulla la rigidezza flessionale della lastra e ... • assunti](https://static.fdocument.org/doc/165x107/5c6af41f09d3f2ff0e8b55c1/tecnica-delle-costruzioni-2-08-09ppt-modalita-compatibilita-pdfworkcorsitecnica.jpg)






![[Ingegneria - ebook - ITA] Costruzioni di ponti](https://static.fdocument.org/doc/165x107/5571fa40497959916991aff9/ingegneria-ebook-ita-costruzioni-di-ponti.jpg)
