Sarah Clifford and Erin An 01 -...
2
Click here to load reader
Transcript of Sarah Clifford and Erin An 01 -...

Δx
Bottom Knot
Sarah Clifford and Erin An
Physics 113 – 01
14 Nov 2017
Bungee Challenge Preliminary Research: A Dynamic Spring Constant
Experimental Summary:
In previous experiments, we sought to model the upward force caused by the bungee’s resistance to
stretching that would decelerate the falling egg. This was accomplished by experimentally determining the
spring constant, K, of the cord under static conditions through the adaptation of Hooke’s Law: mg = -kΔx,
where m is the mass of an object and Δx is the displacement from equilibrium. However, it was
hypothesized that experimentation under dynamic conditions would produce a spring constant more
representative of the string’s behavior during the final egg drop. This hypothesis was investigated by
dropping a .15kg mass attached to a cord of length .5m from a height of 2.31m from the ground (Fig 2).
For each of the 11 trials performed, the displacement from the equilibrium position was measured by
using a tape measure attached to the holder while using a high speed camera (Fig 1). A variable was not
changed with each trial because we first experimented with changes in height before encountering a
maximum height given the maximum height of the stand. The spring constant and its standard deviation,
7.55 ±0.4 Nm, was determined using the law of conservation of energy. While this k value is limited in
practical use, as it is restricted by conditions of length, mass, and drop height, it provides insight on how
our initial model may deviate from a dynamic one.
Diagrams:
Top knot
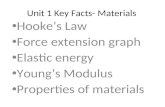
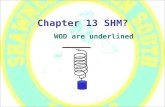
Fig 1. Experimental set up for quantifying the spring constant. The spring constant was found by hanging a mass of .15kg from a cord of
length .5m and dropping the mass at a height of 2.31m. Figure 1a depicts the cord and mass at rest, establishing the equilibrium position. Fig1b
depicts how the mass was dropped, where it was consistently dropped at the top of the holder. Fig1c depicts the cord in the middle of its first
oscillation where it would achieve maximum displacement.
m (g) ±0.001
h (cm) ± 0.1
Δx (m) ± .02
k (N/m) ±0.4
150 231 0.95 7.55
Fig 2. Parameters of experiment. The uncertainty in our mass (m) and height (h) are given by the sensitivity of our scale and tape
measure while our standard deviations represent our uncertainty for the average displacement (Δx ) and average spring constant (k)
value. Our parameters were held constant due to a restriction on time, maximum drop height and maximum cord length given our mass
of 150g. Propagation of uncertainty analysis determined a 40% uncertainty.
Holder
Cord
mass
1.a 1.b 1.c
Tape measure
camera

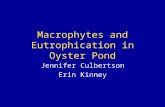
Fig 3. Dispersion of the spring constant. Following 11 trials of measuring maximum displacement of our cord, we used the law of conservation
of energy to determine the spring constant. By assuming all of the gravitational potential energy initially available converted into potential
energy of the spring we determined mgh=½ kΔx2. The spring constant was found to be 7.55 N/m with a standard deviation of .36. Our data
could not be graphed as a y vs change in x as we did not vary x and therefore do not have any trendlines.
Experimental Summary
Equating the gravitational potential energy to the spring potential energy yields the equation mgh=½ kΔx2,
allowing us to find the spring constant, k = 7.55 ± .36 N/m. There is a 50.2% difference between this
experimentally determined k to 4.52 N/m, our predicted value given by our previously determined best-fit
trend line for k vs cord length, k = -11.646m + 10.344. Uncertainty is likely to have arisen from a difficulty
in reading the tape measure as a result of a blurred picture, producing our standard deviation. Along with
the uncertainty provided by precision in our measuring tools, the propagation of error was determined to
be 40%. Future experiments could mitigate these sources of error by using a lighter weight. The steady
increase in K value is counter intuitive – considering a separate experiment suggested use of the cord over
time caused a decrease in the k constant. Similarly, error in reading the tape measure would produce a
more randomly distributed k value at each trial. A steady decrease in displacement (Fig 3) would produce
these results, possibly by inconsistencies in the masses used. As we observed previously, the spring
constant varies with the length of the cord. Future experiments could therefore be performed to evaluate
the relationship between cord length and spring constant in dynamic conditions. The model of the
relationship could then be evaluated by using it to predict a spring constant for a particular cord length
that could be compared to an experimentally determined k.
On my honor, I have neither given nor received any unacknowledged aid on this assignment.
7
7.2
7.4
7.6
7.8
8
8.2
8.4
8.6
1 2 3 4 5 6 7 8 9 10 11
K v
alu
e (N
/m)
Trial
K value dispersion by trial




![Finite Element Clifford Algebra: A New Toolkit for ...math.arizona.edu/~agillette/research/pd11talk.pdf · [0;T] k+2 [0;T] k+1 d 6 (r k d 6 (r k k 1 d 6 (r k 2 Finite Element Clifford](https://static.fdocument.org/doc/165x107/5f58c22634ae8b00ca3fa708/finite-element-clifford-algebra-a-new-toolkit-for-math-agilletteresearchpd11talkpdf.jpg)

![Finite Element Clifford Algebra: A New Toolkit for ...ccom.ucsd.edu/~agillette/research/pd11talk.pdf · [0;T] k+2 [0;T] k+1 d 6 (r k d 6 (r k k 1 d 6 (r k 2 Finite Element Clifford](https://static.fdocument.org/doc/165x107/5f58bc148149db2e4503093f/finite-element-clifford-algebra-a-new-toolkit-for-ccomucsdeduagilletteresearch.jpg)