
Rangkaian Sensor Komparator
16
Petunjuk Rangkaian Sensor Bahan: 4 Buah Resistor ¼ watt 10KΩ 4 Buah Resistor ¼ watt 330Ω 4 Buah photodiode 3mm 4 Buah LED 3mm warna putih Sensor dapat dianalogikan sebagai „mata‟ dari sebuah robot. Mata di sini digunakan untuk „membaca‟ garis hitam dari track robot. Kapan dia akan berbelok ke kanan, kapan dia berbelok ke kiri. Semua berawal dari mata bukan? Kita sebagai manusia tahu arah kita berjalan karena kita memiliki mata, sama seperti robot.
-
Upload
black-twiard -
Category
Documents
-
view
182 -
download
26
description
Penjelasan pembuatan sensor dan komparator
Transcript of Rangkaian Sensor Komparator
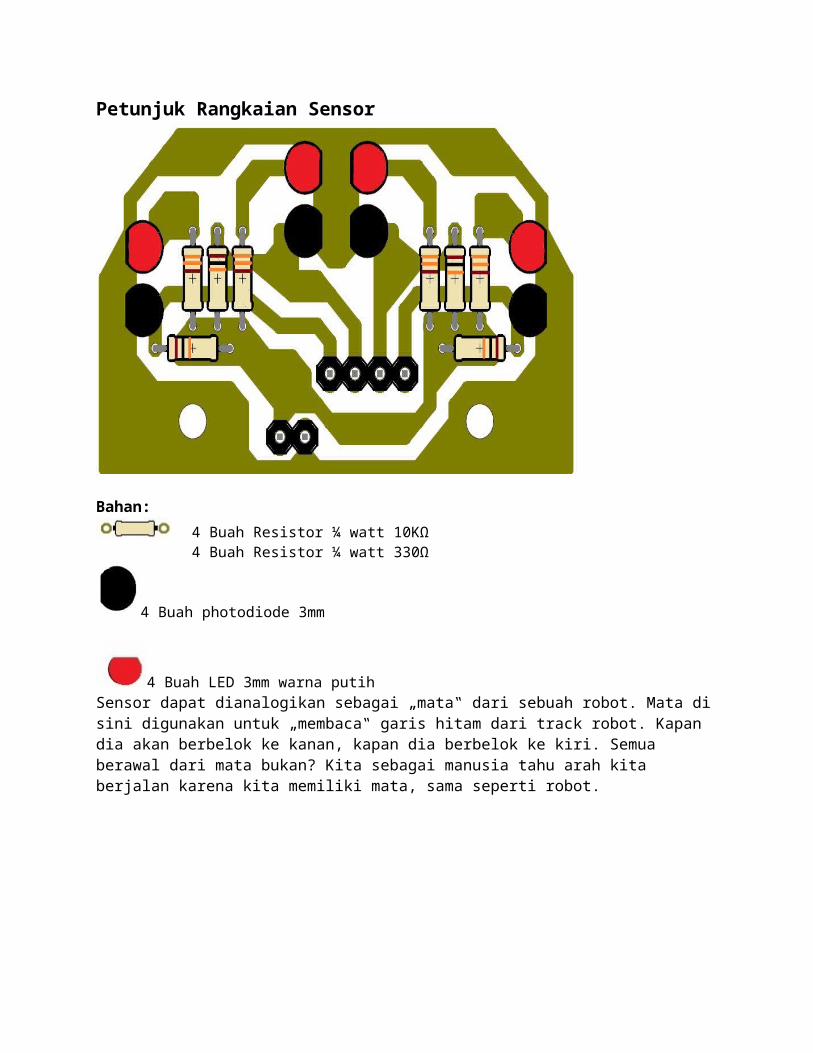
Petunjuk Rangkaian Sensor
Bahan:
4 Buah Resistor ¼ watt 10KΩ 4 Buah Resistor ¼ watt 330Ω
4 Buah photodiode 3mm
4 Buah LED 3mm warna putih Sensor dapat dianalogikan sebagai „mata‟ dari sebuah robot. Mata di sini digunakan untuk „membaca‟ garis hitam dari track robot. Kapan dia akan berbelok ke kanan, kapan dia berbelok ke kiri. Semua berawal dari mata bukan? Kita sebagai manusia tahu arah kita berjalan karena kita memiliki mata, sama seperti robot.
Disamping adalah gambar transmitter (pemancar) dan receiver (penerima). Yang berwarna putih bening adalah LED sebagai transmitter (pemancar cahaya) dan yang berwarna hitam adalah photodiode sebagai receiver (sensor penangkap cahaya).
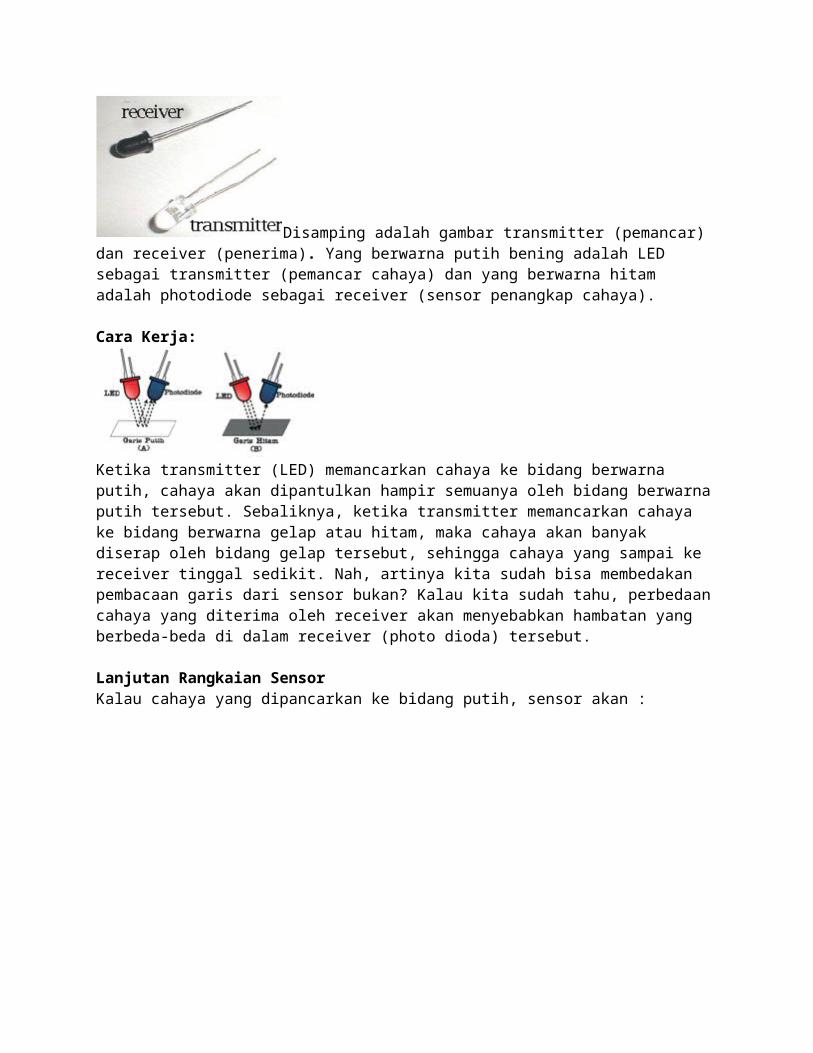
Cara Kerja:
Ketika transmitter (LED) memancarkan cahaya ke bidang berwarna putih, cahaya akan dipantulkan hampir semuanya oleh bidang berwarna putih tersebut. Sebaliknya, ketika transmitter memancarkan cahaya ke bidang berwarna gelap atau hitam, maka cahaya akan banyak diserap oleh bidang gelap tersebut, sehingga cahaya yang sampai ke receiver tinggal sedikit. Nah, artinya kita sudah bisa membedakan pembacaan garis dari sensor bukan? Kalau kita sudah tahu, perbedaan cahaya yang diterima oleh receiver akan menyebabkan hambatan yang berbeda-beda di dalam receiver (photo dioda) tersebut.
Lanjutan Rangkaian Sensor Kalau cahaya yang dipancarkan ke bidang putih, sensor akan :
Sebaliknya, kalau cahaya yang dipantulkan oleh bidang hitam, maka sensor akan :
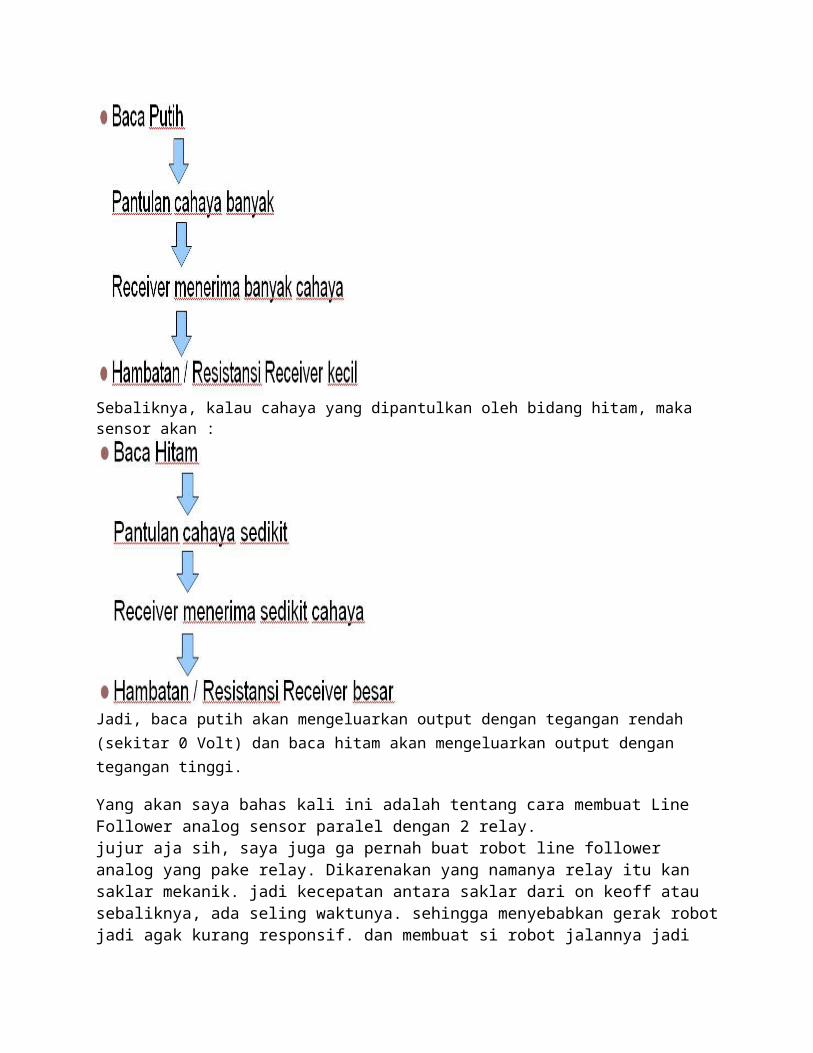
Jadi, baca putih akan mengeluarkan output dengan tegangan rendah (sekitar 0 Volt) dan baca hitam akan mengeluarkan output dengan tegangan tinggi.
Yang akan saya bahas kali ini adalah tentang cara membuat Line Follower analog sensor paralel dengan 2 relay.jujur aja sih, saya juga ga pernah buat robot line follower analog yang pake relay. Dikarenakan yang namanya relay itu kan saklar mekanik. jadi kecepatan antara saklar dari on keoff atau sebaliknya, ada seling waktunya. sehingga menyebabkan gerak robot jadi agak kurang responsif. dan membuat si robot jalannya jadi agak goyang. makanya, robot analog ini gearboxnya harus yang benar benar responsif. Dan itu juga harganya ga murah loh.
Oke. kita mulai dari sensor ya. Skematik sensornya seperti ini gan :
R1 = 1kΩR2 = 33kΩ
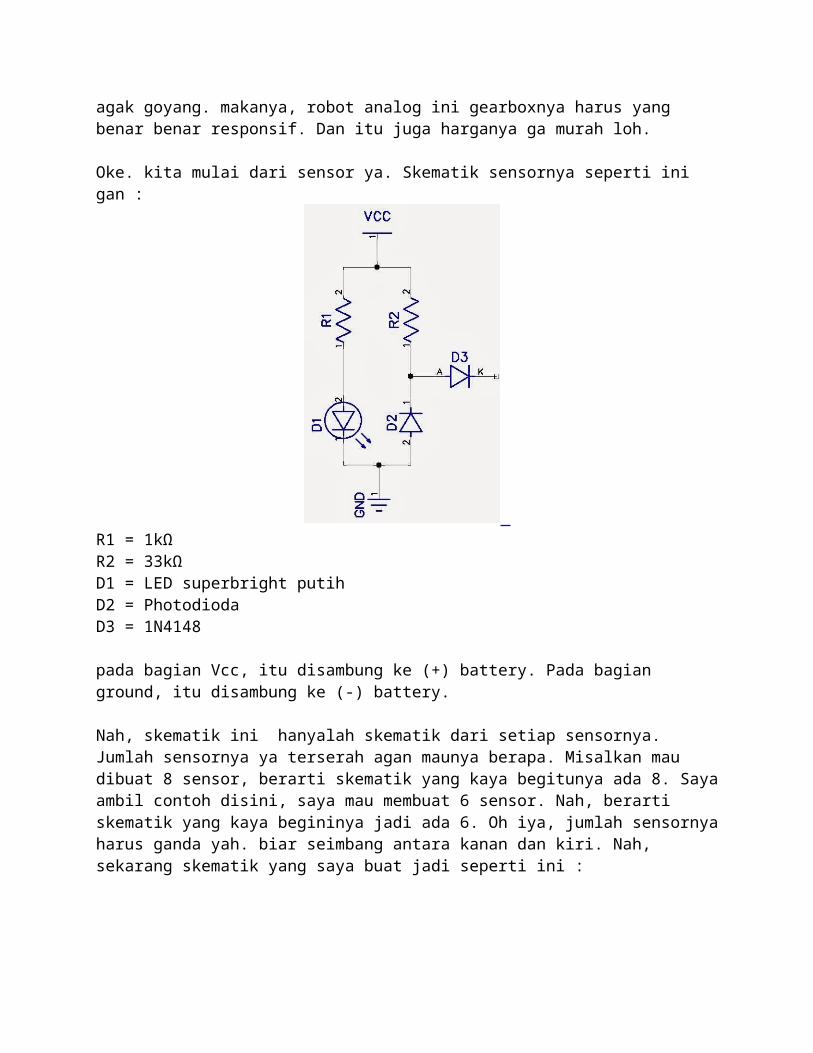
D1 = LED superbright putih D2 = PhotodiodaD3 = 1N4148
pada bagian Vcc, itu disambung ke (+) battery. Pada bagian ground, itu disambung ke (-) battery.
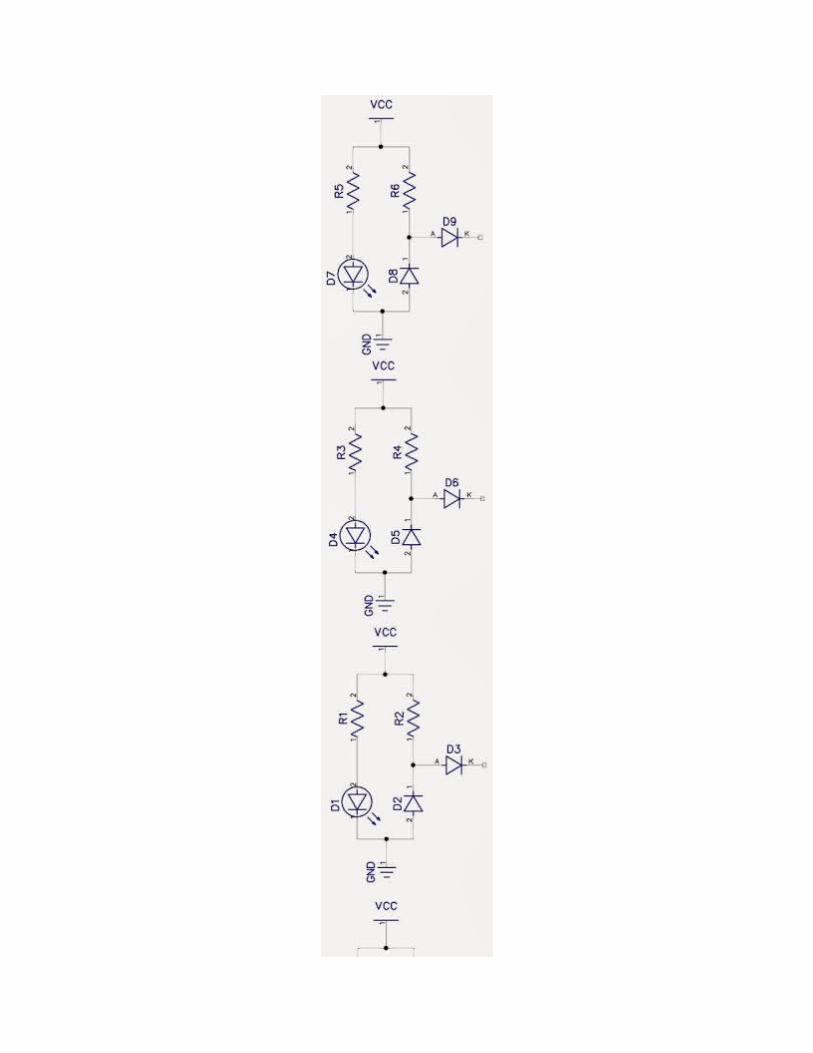
Nah, skematik ini hanyalah skematik dari setiap sensornya. Jumlah sensornya ya terserah agan maunya berapa. Misalkan mau dibuat 8 sensor, berarti skematik yang kaya begitunya ada 8. Saya ambil contoh disini, saya mau membuat 6 sensor. Nah, berarti skematik yang kaya begininya jadi ada 6. Oh iya, jumlah sensornya harus ganda yah. biar seimbang antara kanan dan kiri. Nah, sekarang skematik yang saya buat jadi seperti ini :
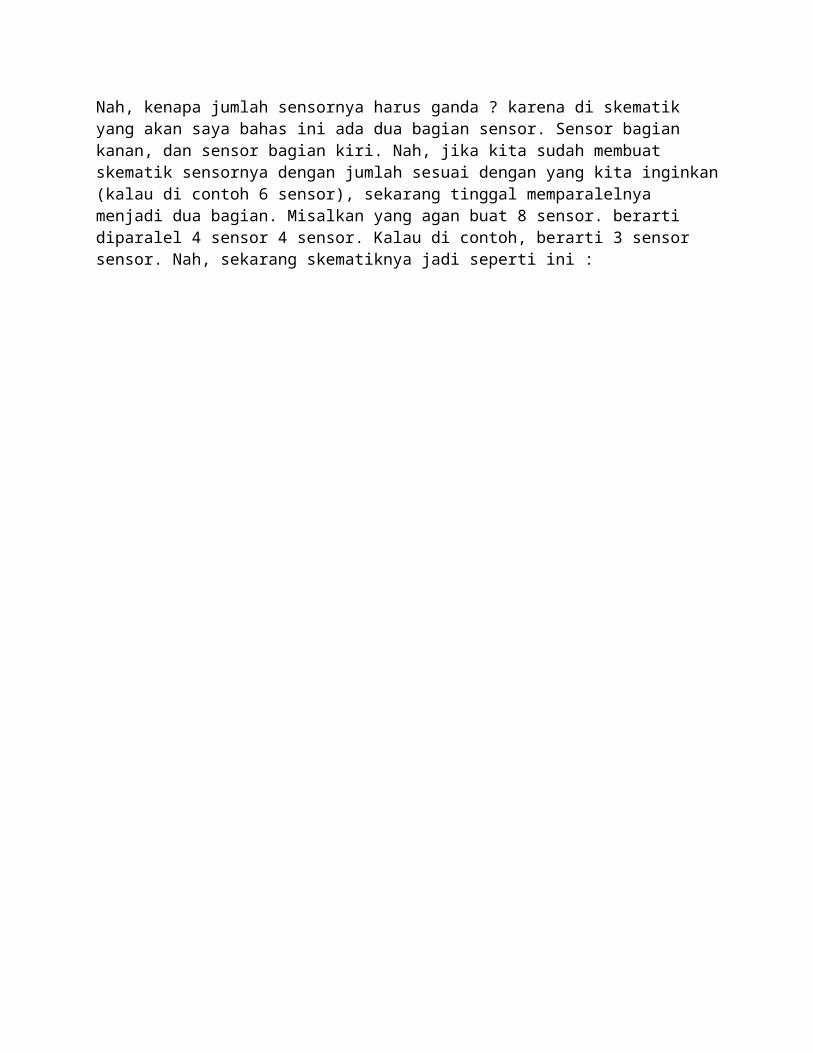
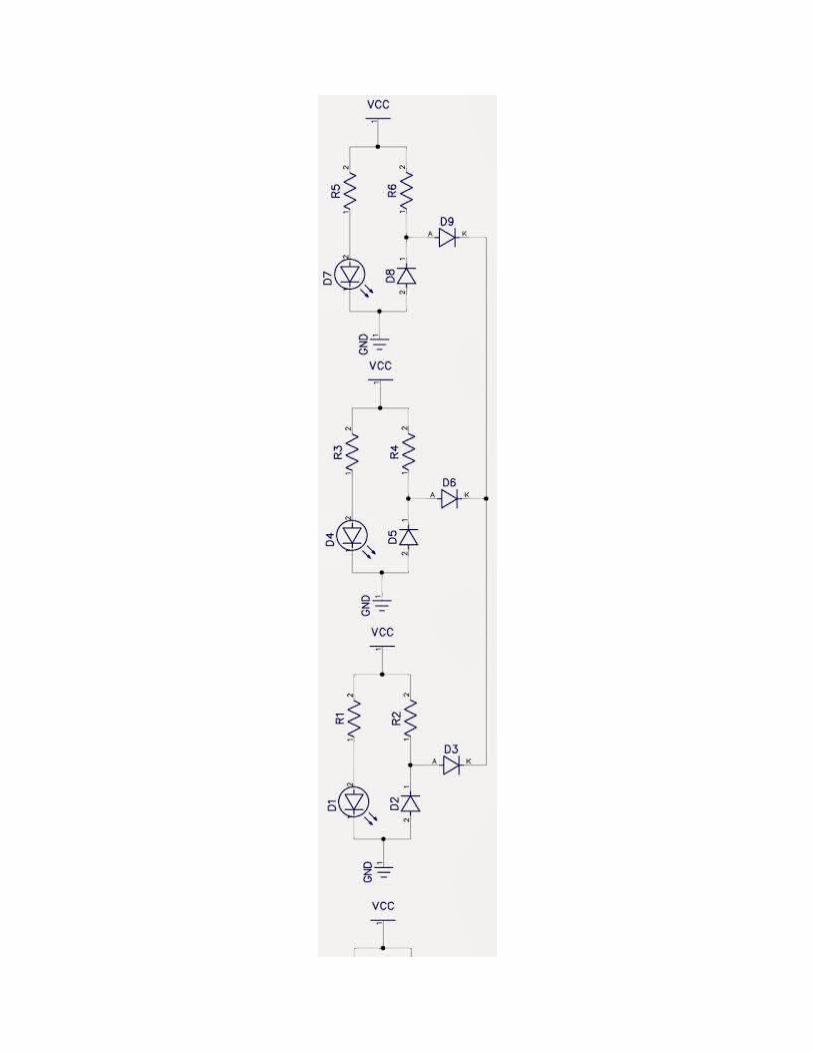
Nah, kenapa jumlah sensornya harus ganda ? karena di skematik yang akan saya bahas ini ada dua bagian sensor. Sensor bagian kanan, dan sensor bagian kiri. Nah, jika kita sudah membuat skematik sensornya dengan jumlah sesuai dengan yang kita inginkan (kalau di contoh 6 sensor), sekarang tinggal memparalelnya menjadi dua bagian. Misalkan yang agan buat 8 sensor. berarti diparalel 4 sensor 4 sensor. Kalau di contoh, berarti 3 sensor sensor. Nah, sekarang skematiknya jadi seperti ini :

Nah, sampai sini udah paham kan ?
Oke .. Sekarang tinggal masukin deh ke komparatornya. Nah, 2 bagian sensor itu, masing masing di masukkan ke op-amp. Jadi, kita butuh 2 Op-Amp. Kita pakai aja Op-Amp dari IC LM358. Nah, sekarang skematiknya jadi seperti ini :
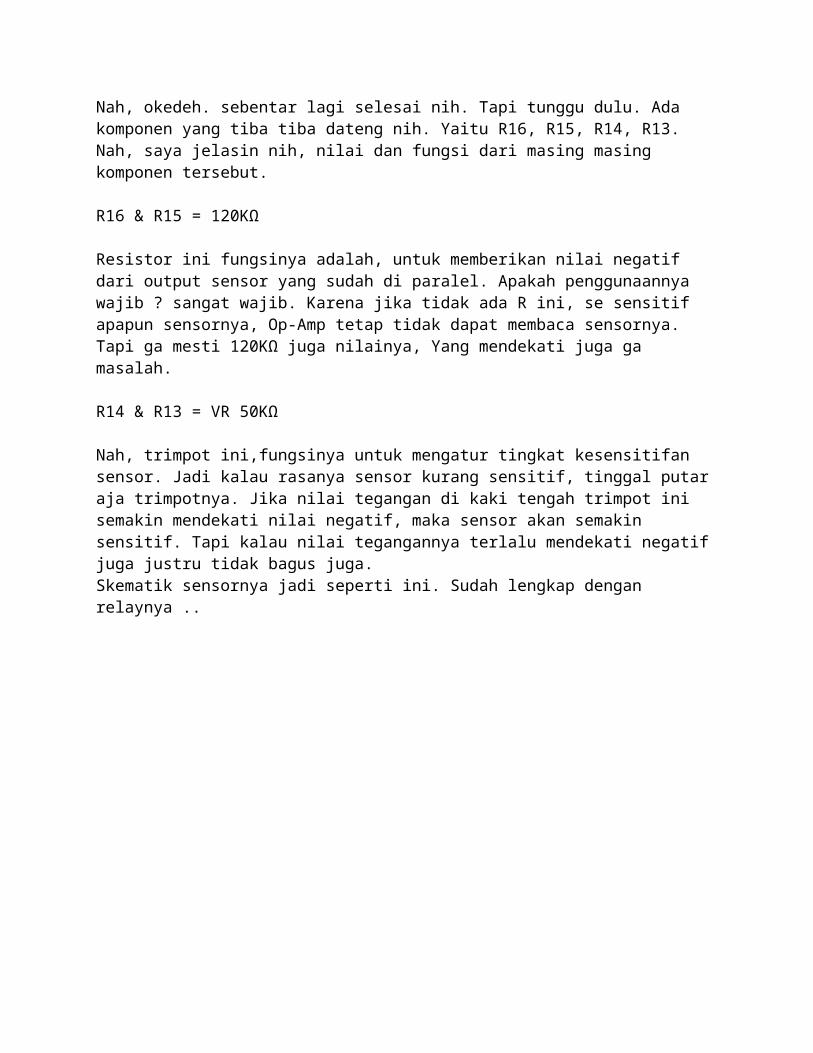
Nah, okedeh. sebentar lagi selesai nih. Tapi tunggu dulu. Ada komponen yang tiba tiba dateng nih. Yaitu R16, R15, R14, R13. Nah, saya jelasin nih, nilai dan fungsi dari masing masing komponen tersebut.
R16 & R15 = 120KΩ
Resistor ini fungsinya adalah, untuk memberikan nilai negatif dari output sensor yang sudah di paralel. Apakah penggunaannya wajib ? sangat wajib. Karena jika tidak ada R ini, se sensitif apapun sensornya, Op-Amp tetap tidak dapat membaca sensornya. Tapi ga mesti 120KΩ juga nilainya, Yang mendekati juga ga masalah.
R14 & R13 = VR 50KΩ
Nah, trimpot ini,fungsinya untuk mengatur tingkat kesensitifan sensor. Jadi kalau rasanya sensor kurang sensitif, tinggal putar aja trimpotnya. Jika nilai tegangan di kaki tengah trimpot ini semakin mendekati nilai negatif, maka sensor akan semakin sensitif. Tapi kalau nilai tegangannya terlalu mendekati negatif juga justru tidak bagus juga. Skematik sensornya jadi seperti ini. Sudah lengkap dengan relaynya ..
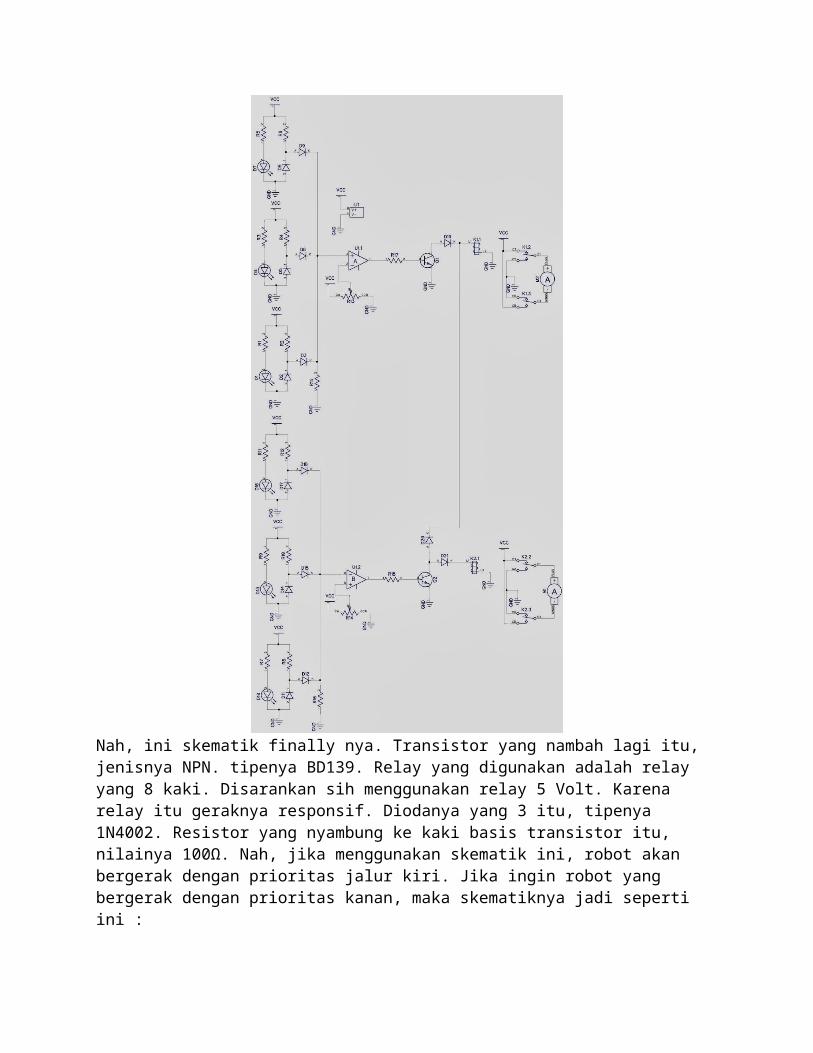
Nah, ini skematik finally nya. Transistor yang nambah lagi itu, jenisnya NPN. tipenya BD139. Relay yang digunakan adalah relay yang 8 kaki. Disarankan sih menggunakan relay 5 Volt. Karena relay itu geraknya responsif. Diodanya yang 3 itu, tipenya 1N4002. Resistor yang nyambung ke kaki basis transistor itu, nilainya 100Ω. Nah, jika menggunakan skematik ini, robot akan bergerak dengan prioritas jalur kiri. Jika ingin robot yang bergerak dengan prioritas kanan, maka skematiknya jadi seperti ini :
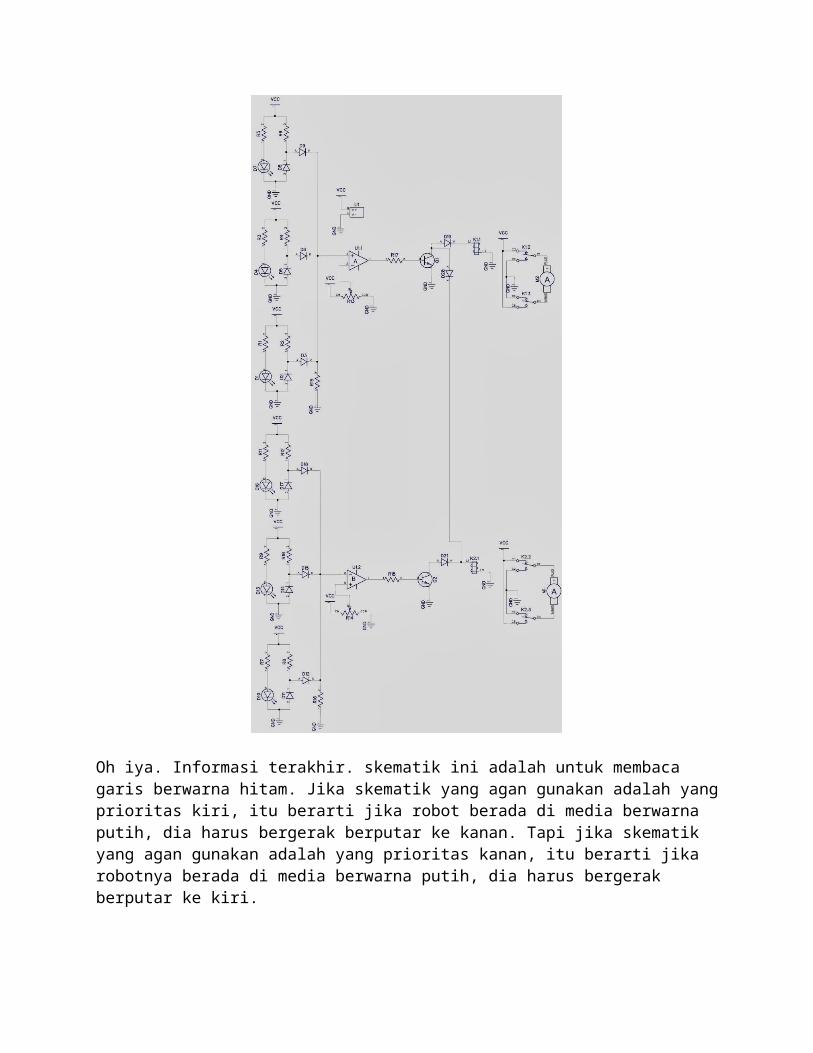
Oh iya. Informasi terakhir. skematik ini adalah untuk membaca garis berwarna hitam. Jika skematik yang agan gunakan adalah yang prioritas kiri, itu berarti jika robot berada di media berwarna putih, dia harus bergerak berputar ke kanan. Tapi jika skematik yang agan gunakan adalah yang prioritas kanan, itu berarti jika robotnya berada di media berwarna putih, dia harus bergerak berputar ke kiri.
Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED
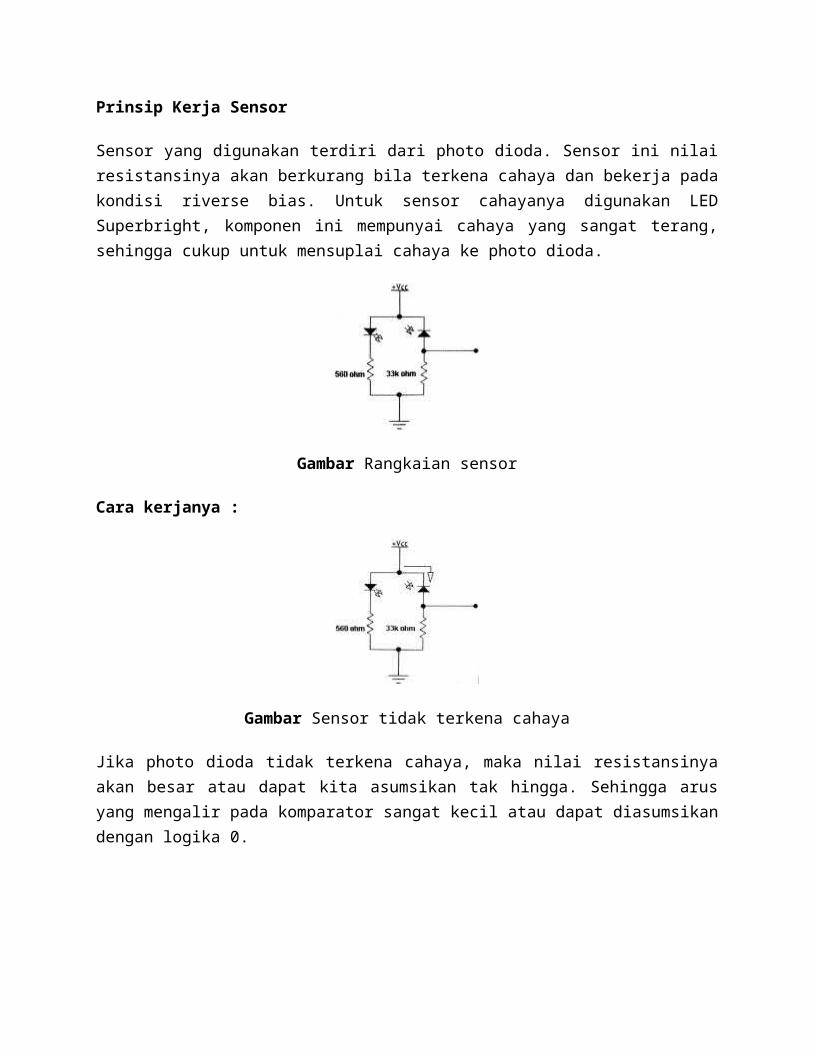
Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.
Gambar Rangkaian sensor
Cara kerjanya :
Gambar Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.
Gambar Sensor terkena cahaya
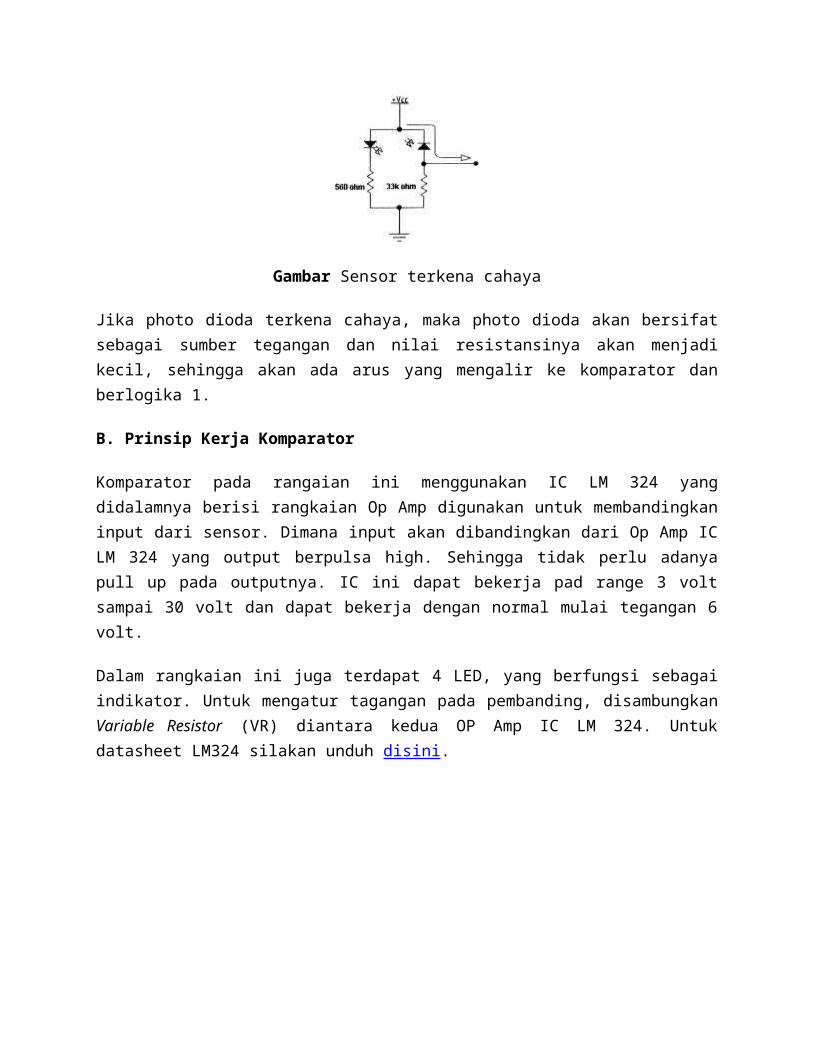
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
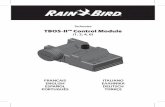
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan unduh disini.
Gambar Rangkaian komparator
Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off.
Kondisi antara titik A dan B akan selalu keterbalikan.
Sebuah komparator dalam robot line tracer untuk menghasilkan tegangan output dengan logika high atau low (1 atau 0) yang digunakan untuk mengaktifkan driver motor (Pada penjelasan
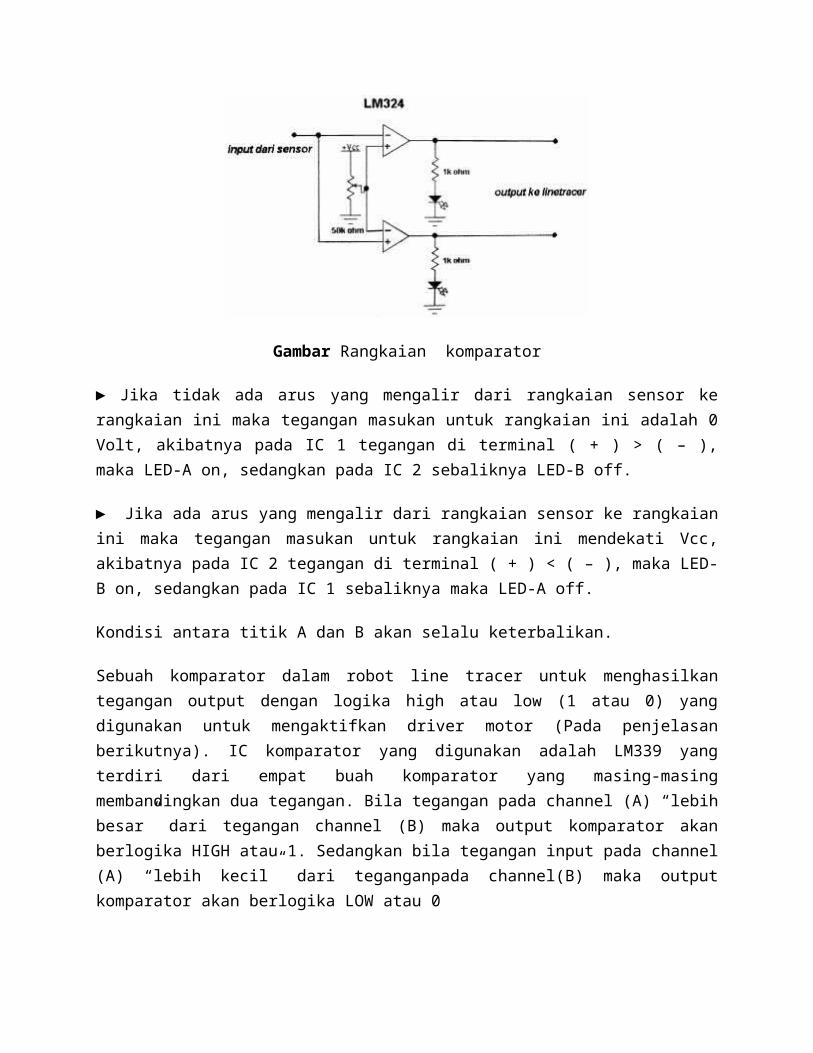
berikutnya). IC komparator yang digunakan adalah LM339 yang terdiri dari empat buah komparator yang masing-masing membandingkan dua tegangan. Bila tegangan pada channel (A) “lebih besar” dari tegangan channel (B) maka output komparator akan berlogika HIGH atau 1. Sedangkan bila tegangan input pada channel (A) “lebih kecil” dari teganganpada channel(B) maka output komparator akan berlogika LOW atau 0