Prednaska MP 2
16
Mongeova projekcia Zobrazenie dvoch rovín Priesečnica dvoch rovín Priesečník priamky s rovinou Pomocná priemetňa - priemet bodu - priemet roviny Zobrazenie jednoduchých telies Prednáška 4 Obsah
Transcript of Prednaska MP 2

� Mongeova projekcia
� Zobrazenie dvoch rovín
� Priesečnica dvoch rovín
� Priesečník priamky s rovinou
� Pomocná priemetňa
- priemet bodu
- priemet roviny
� Zobrazenie jednoduchých telies
Prednáška 4Obsah

Zobrazenie dvoch rovín
ρ1p
x1,2
ρ1p
ρ1p σ
1p
σ1p σ
1p
σ2n
σ2n ρn ρ
2n
ρ
2n σ2n
ρ ll σ ρ σ ρ σ

Postup
1. ,
2. ,
3. ,
Priesečnica rôznobežných rovín
x1,2
ρ1p
σ1p
σ2n
ρ
2n
l1P
P
l2N
x1,2
ρ1p
σ1p
σ2n
ρ
2n
l1N
l2P x1,2
ρ1p
σ1p
σ2n
ρ
2n
l1P
P
l2N
x1,2
ρ1p
σ1p
σ2n
ρ
2n
l1P
P
l2P l
1N
l2N
l1
l2
π
ν
x l2P
l1P
l2N
l1N
ρ
ρp
ρn σn
σp
l2
l1
l
l2Nl
1Pl1Nl
2Pl1
l11 NPl = l
2l22 NPl =

Postup
1. ,
2. , ,
3. ,
4. ,
5. ,
Priesečnica rôznobežných rovín (keď je stopník mimo nákresne)
x1,2
ρ1p σ
1p
ρ
2n σ2n
l1N x1,2
ρ1p σ
1p
ρ
2n σ2n l
2N
x1,2
ρ1p σ
1p
ρ
2n σ2n
ρ2N
ρ1N
σ2N
σ1N
l2N
l1N
σ
21ρ
21 hh =
σ
21ρ
21 hh =
ρ1
1h
x1,2
ρ1p σ
1p
ρ
2n σ2n
σ1
1h
ρ2N
ρ1N
σ2N
σ1N
l2N
l1N
σ
21ρ
21 hh =
σ
21ρ
21 hh =
U1
ρ1
1h
x1,2
ρ1p σ
1p
ρ
2n σ2n
σ1
1h
U2
ρ2N
ρ1N
σ2N
σ1N
l2N
l1N
σ
21ρ
21 hh =
σ
21ρ
21 hh =
ρ1
1h
x1,2
ρ1p σ
1p
ρ
2n σ2n
σ1
1h
U1
U2
ρ2N
ρ1N
σ2N
σ1N
l1
l2 l2N
l1N
σ
21ρ
21 hh =
σ
21ρ
21 hh =
l2N l
1Nσ2
1ρ2
1 hh = ρ1N σ
1Nρ1
1h σ1
1hσ1
1ρ1
11 hhU ∩= 2U
l111 NUl = l
222 NUl =

Priesečník priamky s rovinou
Postup
1. ,
2. ,
3. ,
4. ,
5. ,
6.
x1,2
ρ1p a1
a2
ρ2n
π
ν
x
ρ
l1N
ρp
ρn a2
R1
R2
l2
l2N
l2P
κ
l a
R
κ1= a1=l1
κn
l1P
111 laκ == κ2n
l1P l
2Nl2P l
1Nl1
l11 NPl = l
2l22 NPl =
222 alR ∩= 11 aR ∈
x1,2
ρ1p
κ1=a1
a2
ρ2n
κ2n
x1,2 l1N
ρ1p
κ1=a1=l1
a2
l1P
ρ2n
l2P
l2N
κ2n
x1,2 l1N
ρ1p
κ1=a1=l1
a2
l2
l1P
ρ2n
l2P
l2N
κ2n
x1,2 l1N
ρ1p
κ1=a1=l1
a2
R1
R2
l2
l1P
ρ2n
l2P
l2N
κ2n
viditeľnosť
x1,2 l1N
ρ1p
κ1=a1=l1
a2
R1
R2
l2
l1P
ρ2n
l2P
l2N
κ2n

Priesečník priamky s rovinou – pomocou krycej priamky
x1,2
ρ
1p 1a
a2
ρ
2n
x1,2
ρ
1p
l1P
P
l1N
11 la =
a2
ρ
2n
x1,2
ρ
1p
l1P
P
l2P
l1N
l2N
11 la =
l2
a2
ρ
2n
R1
x1,2
ρ
1p
l1P
P
l2P
l1N
l2N
11 la =
l2
a2
R2
ρ
2n
R1
x1,2
ρ
1p
l1P
P
l2P
l1N
l2N
11 la =
l2
a2
R2
ρ
2n
Postup
1. ,
2.
3.
4. ,
5.
11 la = l ... krycia priamka
l1
l11 NPl =
l2
l22 NPl =
222 alR ∩= 11 aR ∈
viditeľnosť

Pomocná priemetňa( tretia priemetňa )
ν
x
κ
A
A2
A1
A3
A3 y1,3
zA
zA
zA
zA
π
a) kolmá na pôdorysňu
b) kolmá na nárysňu
c) kolmá na π aj ν
vedľajšia
- hlavná

Priemet bodu do pomocnej priemetne
ν
x
κ
A
A2
A1
A3
A3 y1,3
zA
zA
zA
zA
π
x1,2
A2
A1
smer pohľadu
Postup
1.
2.
dusmer_pohlay1,3 ⊥
x1,2
A2
A1
y1,3
smer pohľadu
3A
x1,2
A2
A1
A3 y1,3
zA
zA
smer pohľadu
πκ ⊥a)

Priemet bodu do pomocnej priemetne
νκ ⊥
x1,2
A2
A1
A3
z2,3
yA
yA
smer pohľadu
b) c) νκπκ ⊥∧⊥
x1,2
A2
A1
A3
yA
yA smer pohľadu
z2,3
x1,2
A2
A1
A3
yA
yA smer pohľadu
y1,3= z2,3

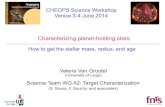
Priemet roviny kolmej na pomocnú priemetňu
Dané: rovina
Zostrojte: tretí priemet roviny ρ do pomocnej priemetne kolmej na π
x1,2
ρ
1p
ρ
2n
x1,2
y1,3
ρ
1p
ρ
2n Postup
1.
2.
3.
4.
5.
ρ11,3 py ⊥
x1,2
y1,3
P1=P3
ρ
1p
ρ
2n
bod_rovinyPP 31 −=
x1,2
N2
y1,3
P1=P3
ρ
1p
ρ
2n
N1 zostrojiťN-zvoliťN 12 −−
met_rovinytretí_priePNρ 333 −=
x1,2
N2
y1,3
zN
zN
N3
P1=P3
ρ
1p
ρ
2n
N1
3N
x1,2
N2
ρρρρ3
y1,3
zN
zN
N3
P1=P3
ρ
1p
ρ
2n
( )ρ2ρ1 n,pρ

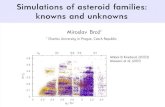
Zobrazenie jednoduchých telies
Jednoduché plochy
ihlanová hranolová kužeľová valcová
V
k
V
k
m
k
m
k

V
k
ρρρρ
m
ρρρρ
k
V
k
ρρρρ
ρρρρ
k
Jednoduché telesá
ihlan
kužeľ
časť priestoru ohraničenáuzavretou plochou a rovinou
hranol
valec
časť priestoru ohraničenáuzavretou plochou a dvomi rovnobežnými rovinami

Jednoduché telesáV
ρρρρ
S
o v
S′
ρρρρ
o v
S
V
ρρρρ
o v
S r
S′
ρρρρ
o v
S r
pravidelný
4-boký ihlan
pravidelný
6-boký hranol
rotačný kužeľ
rotačný valec
podstava: pravidelný n-uholník
os: kolmá na rovinu podstavy
podstava: kružnica
os: kolmá na rovinu podstavy

x1,2
1A
2A
1S
2S
x1,2
1A
2A
1S
2S
1B
x1,2
1A
2A
1C
1D
11 oS =
2B 2C 2D
2S
1B
x1,2
1A
2A
1C
1D
11 oS =
2B 2C 2D
2S
2o
1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
y1,3
smer pohľadu
1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
y1,3 A3
B3 S3
D3
C3
smer pohľadu
Postup
1.
2.
3.
4.
5.
6.
7.
22221111 DCBA,DCBA
21 V,V
,...Vhrany_A 11
dusmer_pohlay1,3 ⊥
3333 DCBA
3V
3,...3Vhrany_A
D3
S3 1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
y1,3 A3
B3
C3
smer pohľadu
v
V3
o3
D3
S3 1B
x1,2
1A
2A
1C
1D
111 VoS ==
2B 2C 2D
2S
2o
v
V2
y1,3 A3
B3
C3
smer pohľadu
v
V3
o3
Úloha 1: Zobrazte pravidelný 4-boký ihlan s podstavou v π.
Zostrojte pomocný priemet do roviny kolmej na π.
Dané: S - stred podstavy, A – vrchol podstavy, v – výška telesa

Úloha 2: Zobrazte rotačný valec s podstavou v π. Zostrojte
nadhľad telesa (priemet do roviny kolmej na νννν).
Dané: S - stred podstavy, – polomer podstavy, v – výška telesakr
x1,2
1S
2S x1,2
1S
rk
2S 2A
1A
Postup
1.
2.
3.
4.
5.
6.
7.
8.
9.
t.,2.priemepodstava_1
21 S,S ′′
tavahorná_pods
obrys
2,3z
33SS ′
avylnej_podstpriemet_do
avyrnej_podstpriemet_ho
obrys
x1,2
11 SS ′=
2S′
rk
2S 2A
1A
v
x1,2
11 SS ′=
2S′
rk
2S 2A
1A
v
x1,2
11 SS ′=
2S′
rk
2S 2A
1A
v
x1,2
11 SS ′=
2S′
rk
2,3z smer pohľadu
2S 2A
1A
v
x1,2
11 SS ′=
2S′
rk
Sy
2,3z smer pohľadu
2S
3S
3S′
Sy
Sy ′ 2A
1A
v
x1,2
11 SS ′=
2S′
rk
Sy
2,3z smer pohľadu
2S
3S
3S′
Sy
Sy ′
rk
2A
1A
3A
v
x1,2
11 SS ′=
2S′
rk
Sy
2,3z smer pohľadu
2S
3S
3S′
Sy
Sy ′
rk
2A
1A
3A
v
x1,2
11 SS ′=
2S′
rk
Sy
2,3z smer pohľadu
2S
3S
3S′
Sy
Sy ′
rk
2A
1A
3A
v
ťviditelnos

2S
x1,2
1A
2A
111 oVS ==
2V
2o
2S
x1,2
1A
2A
1S
2V
2o
1V
1o
2S
x1,2
111 oVS ==
2V
2o
r
v
2S
x1,2
1S
2V
2o
r
1V
2S
x1,2
111 oSS =′=
2S′
2o
r
v
2S x1,2
1S
2S′
2o
r 1S′
1o
Združené priemety jednoduchých telies
pravidelný 5-boký ihlan
šikmý 5-boký ihlan
rotačný kužeľ rotačný valec
šikmý kruhový kužeľ šikmý kruhový valec