Optimal Control - Automatic Control...
3
Click here to load reader
Transcript of Optimal Control - Automatic Control...

1
Optimal Control
Problem 1 : KKT conditions
Solve the following quadratic optimization problem
minx1,...,xn
n∑i=1
qix2i
st.
n∑i=1
xi = c,
where qi > 0, ∀i ∈ [1, . . . , n] and c a given constant. Hint: use the KKT conditions.
Solution :
The Lagrangian is given by
L(x1, . . . , xN , λ) =n∑
i=1
qix2i + λ
(n∑
i=1
xi − c
).
The (necessary) optimality conditions on the optimizer (x?, λ?) read (KKT)
∂L
∂xi= 0 ⇐⇒ 2qixi + λ? = 0, ∀i = [1, . . . , n], (1)
∂L
∂λ= 0 ⇐⇒
n∑i=1
xi = c. (2)
From the first equation we deduce
x?i = − λ?
2qi, ∀i = [1, . . . , n].
Substituting the last result in the second KKT condition it follows thatn∑
i=1
− λ?
2qi= c =⇒ λ? = − 2c∑n
i=11qi
,
and consequentlyxi =
c
qi∑n
i=11qi
, ∀i = [1, . . . , n].
Problem 2 : Pontryagin’s principle
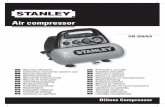
We are given a water tank system according to Figure 1.
The dynamics of the water tank are given according to the differential equation
x1 = −x1 + u,
x2 = x1 − x2.
We assume that initially both tanks are empty. The input 0 ≤ u(t) ≤ 1 is contraint for all times. The cost tobe minimized is
J =1
5
∫ 5
0
u(t)dt− x2(5).

2
Fig. 1. Water tank
1) State the problem as an optimal control problem.
2) Find the optimal input u(t).
Solution :
1) The optimal control problem can be stated as
infu
15
∫ T
0u(t)dt− x2(5)
s.t. x1 = −x1 + u,x2 = x1 − x2,0 ≤ u(t) ≤ 1, ∀t.
where the optimization variable u : [0, 5]→ R is a function.
2) The Hamiltonian for the aforementioned problem is
H(x, u, λ) =u
5+ λ1(−x1 + u) + λ2(x1 − x2).
The optimal state x?(t), control u?(t) and costate λ?(t) must satisfy the following conditions (Pontryaginprinciple): The system equations read
x?1(t) = −x?1(t) + u?(t),
x?2(t) = x?1(t)− x?2(t).
The costate equations reduce to
−λ?1(t) = −λ?1(t) + λ?2(t),
−λ?2(t) = −λ?2(t).

3
The minimum principle states that
u? = arg min0≤u≤1
H(x?, u, λ?)
= arg min0≤u≤1
u
5+ λ?1(t)(−x?1(t) + u) + 5λ?2(t)x
?1(t)
= arg min0≤u≤1
(1
5+ λ?1(t))u(t)
=
0
1
5+ λ?1(t) ≥ 0
11
5+ λ?1(t) < 0
We must have the initial/final conditions
λ?1(5) = 0, x?1(0) = 0
λ?2(5) = −1, x?2(0) = 0
We can now solve for the optimal costate trajectory directly. The optimal costate trajectories are
λ?1(t) = et−5(t− 5),
λ?2(t) = −et−5
The optimal control u?(t) can hence be found as
u?(t) ≈
{1 2.45 ≤ t ≤ 4.74
0 Otherwise



![Product sheet extended€¦ · LTS - Load Transfer Switch [Accessories for ACP Automatic Control Panel] The Load Transfer Switch (LTS) panel operates the power supply changeover between](https://static.fdocument.org/doc/165x107/604baa402bd4a154a6763b39/product-sheet-extended-lts-load-transfer-switch-accessories-for-acp-automatic.jpg)