Note di Topologia Di erenziale · 2019. 5. 10. · Il caso di interesse per noi e quello in cui X =...
92
Note di Topologia Differenziale Roberto Paoletti 1 Richiami di topologia. 1.1 Aperti e chiusi. Definizione 1.1. Sia X un insieme. Una topologia su X ` e una collezione τ X di sottoinsiemi di X , sodddisfacence le seguenti condizioni: •∅∈ τ X ; • X ∈ τ X ; • se U i ∈ τ X , i ∈ I , allora S i∈I U i ∈ τ X (cio` e τ X ` e chiuso rispetto a unioni arbitrarie); • se U 1 ,...,U r ∈ τ X per qualche intero r ≥ 1, allora T r i=1 U i ∈ τ X (cio` e τ X ` e chiuso rispetto a intersezioni finite). Uno spazio topologico ` e una coppia (X, τ X ), ove X ` e un insieme e τ X ` e una topologia su X . Se (X, τ X )` e uno spazio topologico, gli elementi di τ X si dicono gli aperti di (X, τ X ). Esercizio 1.1. Se (X, τ X )` e uno spazio topologico, un sottoinsieme S ⊆ X si dice chiuso in X se il suo complementare S c in X ` e aperto, cio` e se S c ∈ τ X . Usando le relazioni S i S i c = T i S c i e T i S i c = S i S c i , si formulino e dimostrino le propriet` a della collezione dei chiusi di (X, τ X ) partendo dalle propriet` a di τ X . Definizione 1.2. Sia (X, τ X ) uno spazio topologico, A ⊆ X un sottoinsieme. La topologia indotta su A dalla topologia di X , denotata τ X (A), ` e l’insieme delle intersezioni di A con gli aperti di τ X . Esplicitamente: τ X (A) =: A ∩ U : U ∈ τ X . Esercizio 1.2. Si dimostri che τ X (A)` e effettivamente una topologia, cio` e che (A, τ X (A)) ` e uno spazio topologico. 1
Transcript of Note di Topologia Di erenziale · 2019. 5. 10. · Il caso di interesse per noi e quello in cui X =...

Note di Topologia Differenziale
Roberto Paoletti
1 Richiami di topologia.
1.1 Aperti e chiusi.
Definizione 1.1. Sia X un insieme. Una topologia su X e una collezione τXdi sottoinsiemi di X, sodddisfacence le seguenti condizioni:
• ∅ ∈ τX ;
• X ∈ τX ;
• se Ui ∈ τX , i ∈ I, allora⋃i∈I Ui ∈ τX (cioe τX e chiuso rispetto a unioni
arbitrarie);
• se U1, . . . , Ur ∈ τX per qualche intero r ≥ 1, allora⋂ri=1 Ui ∈ τX (cioe
τX e chiuso rispetto a intersezioni finite).
Uno spazio topologico e una coppia (X, τX), ove X e un insieme e τX euna topologia su X. Se (X, τX) e uno spazio topologico, gli elementi di τX sidicono gli aperti di (X, τX).
Esercizio 1.1. Se (X, τX) e uno spazio topologico, un sottoinsieme S ⊆ X sidice chiuso in X se il suo complementare Sc in X e aperto, cioe se Sc ∈ τX .
Usando le relazioni(⋃
i Si
)c=⋂i S
ci e
(⋂i Si
)c=⋃i S
ci , si formulino e
dimostrino le proprieta della collezione dei chiusi di (X, τX) partendo dalleproprieta di τX .
Definizione 1.2. Sia (X, τX) uno spazio topologico, A ⊆ X un sottoinsieme.La topologia indotta su A dalla topologia di X, denotata τX(A), e l’insiemedelle intersezioni di A con gli aperti di τX . Esplicitamente:
τX(A) =:{A ∩ U : U ∈ τX
}.
Esercizio 1.2. Si dimostri che τX(A) e effettivamente una topologia, cioeche (A, τX(A)) e uno spazio topologico.
1

Il caso di interesse per noi e quello in cui X = Rn per qualche n ≥0, dotato della topologia Euclidea, e A ⊆ Rn un sottoinsieme arbitrario.Converremo che R0 = {0}.
Definizione 1.3. La topologia Euclidea di Rn, denotata τn, e la collezionedei sottoinsiemi U ⊆ Rn che godono della seguente proprieta: per ogni u ∈ Uesiste ε > 0 tale che se u′ ∈ Rn, ‖u− u′‖ < ε allora u′ ∈ U .
In altre parole, U ∈ τn se e solo se U e unione di palle aperte.
Esercizio 1.3. Dimostrare che τn e effettivamente una topologia su Rn.
Dato un sottoinsieme A ⊆ Rn, denoteremo la topologia indotta su A daquella Euclidea su Rn con τn(A). Piu esplicitamente, un sottoinsieme S ⊆ Ae aperto in A per τn(A) se ha la forma S = A ∩ U , essendo U ⊆ Rn unsottoinsieme aperto di Rn. Quindi
τn(A) =: {A ∩ U : U ∈ τn}.
Ovviamente un sottoinsieme aperto di A non e, in generale, un sottoin-sieme aperto di Rm; cio accade in generale solo se A e a sua volta un apertodi Rm. In altri termini,
τm(A) * τm,
a meno che A sia un aperto di Rm, nel qual caso
τm(A) = {U ∈ τm : U ⊆ A}.
Esempio 1.1. Supponiamo m < n e identifichiamo Rm con il sottospaziolineare
{(x1, . . . , xm, 0 . . . , 0)t : xi ∈ R} ⊆ Rn.
Allora A ⊆ Rm e aperto per la topologia indotta se e solo se e aperto per latopologia Euclidea intrinseca di Rm:
τn(Rm) = τm.
Esempio 1.2. [0, 1) = [0, 2] ∩ (−1, 1) e un aperto in [0, 2] pur non essendoaperto in R.
Definizione 1.4. Se (A, τA) e (B, τB) sono spazi topologici (a noi interessanoqui essenzialmente solo le topologie indotte da quella Euclidea su sottoinsiemidi Rk), una mappa f : A→ B si dice continua se l’immagine inversa di unaperto in B e sempre un aperto in A, ovvero se S ∈ τB ⇒ f−1(S) ∈ τA.
2

E noto che un’applicazione C∞
f : U → V
essendo U ⊆ Rm e V ⊆ Rn aperti e continua. In questa situazione, abbiamoil seguente:
Lemma 1.1. Sia f : U → V una mappa continua. Siano A ⊆ U e B ⊆ Vcon f(A) ⊆ B. Allora la mappa indotta f |A : A→ B e continua.
Abbiamo la seguente ovvia osservazione:
Lemma 1.2. Sia f : U → Rn una mappa C∞ definita su un aperto U ⊆ Rm.Sia R ⊆ Rn un sottoinsieme tale che f(U) ⊆ R. Allora f−1(S) e un aperto(di Rn) per ogni aperto S di R.
1.2 Connessione.
Dalla definizione di topologia segue immediatamente che se (X, τX) e unospazio topologico, allora X e ∅ sono sottoinsiemi di X aperti e chiusi. Ingenerale, non saranno gli unici sottoinsiemi di A con questa proprieta: adesempio, se X = {0, 1} ⊆ R con la topologia indotta, {0}, {1} ⊆ X sonosottoinsiemi sia aperti che chiusi. Si noti che 0, 1 ∈ X non possono esserecollegati da un cammino continuo γ : [0, 1]→ X.
Definizione 1.5. Sia (A, τA) uno spazio topologico; diremo che:
• A e connesso se A non ha sottoinsiemi non banali (cioe diversi da Astesso e dal vuoto) che sono simultaneamente aperti e chiusi;
• A e connesso per archi se per ogni a, b ∈ A esiste una funzione continuaγ : [0, 1]→ A tale che γ(0) = a, γ(1) = b.
Esercizio 1.4. Dimostrare il seguente asserto: dato che [0, 1] e connesso, seA e connesso per archi, allora A e connesso. Il viceversa e vero?
Esempio 1.3. Per ogni intero n ≥ 1, sia
Sn =:
x1
...xn+1
∈ Rn+1 :∑j
x2j = 1
la sfera unitaria di centro l’origine. Allora Sn (con la topologia indottada quella Euclidea) e uno spazio topologico connesso per archi, e quindiconnesso, per ogni n ≥ 1.
3

Innanzitutto, per n = 1 abbiamo che S1 ⊆ R2 e l’immagine di R mediantela funzione continua f : R→ R2 data da
f(ϑ) =
(cos(ϑ)sin(ϑ)
).
Se p, q ∈ S1, possiamo trovare ϑ0, ϑ1 ∈ R tali che p = f(ϑ0), q = f(ϑ1).Quindi la mappa γ : [0, 1]→ S1 data da
γ(t) =: f(ϑ0 + t(ϑ1 − ϑ0)
)e un cammino contnuo in S1 da p a q. Ne segue che S1 e connesso per archi,quindi connesso.
Possiamo ora dimostrare che Sn e connesso per archi per ogni n ≥1. Siano p, q ∈ Sn, p 6= q. Sia V ⊆ Rn+1 il sottospazio vettoriale bi-dimensionale generato p e q. Scegliendo una base ortonormale di V , otte-niamo un’isomorfismo unitario di V con R2. Ora Sn ∩ V consiste dei vettoriin V ∼= R2 di norma 1, quindi Sn ∩ V e (omeomorfo a) S1. Ma S1 e con-nesso per archi, e dato che p, q ∈ Sn ∩ V , esiste un cammino continuo inSn ∩ V ⊆ Sn da p a q.
Esercizio 1.5. Siano A,B spazi topologici. Dimostrare quanto segue:
• A non e connesso se e solo se esistono aperti B,C ⊆ A, entrambi nonvuoti, disgiunti e tali che A = B ∪ C;
• supponiamo che f : A → B sia una funzione continua suriettiva; se Ae connesso, tale e anche B;
• supponiamo che f : A → B sia una funzione continua suriettiva; se Ae connesso per archi, tale e anche B.
Vorremmo invertire la conclusione dell’ultimo esercizio: se f : A → B econtinua, la connessione di B implica quella di A? Ovviamente no, anchese f e suriettiva: basta prendere ad esempio f : {0, 1} → {0} (visti comesottoinsiemi di R, e con l’unica funzione possibile - quella costante). Cipotremmo chiedere se la connessione di B e di ogni fibra f−1(b) = {a ∈A : f(a) = b} sono sufficienti a garantire che A e connesso, almeno se f esuriettiva. Anche questo e falso:
Esercizio 1.6. Sia A = {(t, 0) : t 6= 0} ∪ {(0, 1)} ⊆ R2, B = R, e siaf : A→ B la proiezione sull’asse x. Dimostrare che f e suriettiva, ogni fibradi f e connessa, B e connesso, ma A non e connesso.
4

La vita appare grama, ma non tutto e perduto.
Definizione 1.6. Siano (X, τX) e (Y, τY ) spazi topologici, f : X → Y unafunzione continua. Diremo che f e aperta se f(U) e un aperto di Y ogni voltache U e un aperto di X, cioe se vale l’implicazione: U ∈ τX ⇒ f(U) ∈ τY .
Proposizione 1.1. Siano (X, τX), (Y, τY ) spazi topologici. Sia f : X → Yuna funzione continua. Supponiamo che valgano le seguenti condizioni:
• Y e connesso;
• f e aperta;
• f e suriettiva;
• per ogni y ∈ Y , il sottoinsieme immagine inversa
f−1(y) =: {x ∈ X : f(x) = y} ⊆ X
e un sottoinsieme connesso di X per la topologia indotta.
Allora anche X e connesso.
Dim. Supponiamo, per assurdo, che X non sia connesso. Allora esistonoaperti A,B ⊆ X disgiunti ed entrambi non vuoti tali che X = A ∪ B. Dalmomento che f e suriettiva, abbiamo
Y = f(X)
= f(A ∪B)
= f(A) ∪ f(B).
Dal momento che A e B sono aperti in X e che f e una funzione aperta,f(A) e f(B) sono aperti in Y . E dal momento che A e B non sono vuoti,tali non sono nemmeno f(A) e f(B).
Ora sappiamo che Y e connesso; deve pertanto essere f(A) ∩ f(B) 6= ∅.Fissiamo y ∈ f(A) ∩ f(B). Per costruzione, dato che y ∈ f(A), esiste a ∈ Atale che f(a) = y; analogamente, dato che y ∈ f(B), esiste b ∈ B tale chef(b) = y. Quindi, a ∈ A ∩ f−1(y) 6= ∅, b ∈ B ∩ f−1(y) 6= ∅.
Ora A ∩ f−1(y) e B ∩ f−1(y) sono sottoinsiemi aperti di f−1(y) per latopologia indotta e non vuoti. Inoltre, abbiamo
f−1(y) = f−1(y) ∩X (1)
= f−1(y) ∩(A ∪B)
=(f−1(y) ∩ A
)∪(f−1(y) ∩B
),
5

e anche (f−1(y) ∩ A
)∩(f−1(y) ∩B
)= f−1(y) ∩
(A ∩B
)(2)
= f−1(y) ∩ ∅= ∅.
La relazioni (??) e (??) esprimono f−1(y) come unione disgiunta di duesottoinsiemi aperti non vuoti. Questo e assurdo, dato che per ipotesi f−1(y)e uno spazio connesso.
Esercizio 1.7. Si ridimostri la connessione di Sn, per ogni n ≥ 1, comesegue:
1. si assuma data la connessione di S1 dimostrata sopra usando la mappasuriettiva R→ S1, ϑ 7→ eiϑ;
2. per n ≥ 2, si faccia l’ipotesi di induzione che Sn−1 sia connesso;
3. si consideri la mappa f : Sn → [−1, 1] data dalla restrizione a Sn dellaproiezione sulla prima coordinata, Rn+1 → R; si dimostri che f e apertae suriettiva;
4. si dimostri poi che f−1(y) e omeomorfo a Sn−1 se −1 < y < 1, mentref−1(y) e un punto se y = ±1;
5. si applichi la proposizione.
Esercizio 1.8. Si determini per quali valori del parametro a ∈ R e connessoil luogo
Ta =
x
yz
∈ R3 : z2 = x2 + y2 + a
.
(Suggerimento: si consideri la restrizione a Ta della proiezione dulla terzacomponente).
Definizione 1.7. Sia (X, τX) uno spazio topologico non vuoto. Un sottoin-sieme Y ⊆ X si dice una componente connessa di X se:
• Y 6= ∅;
• Y e aperto e chiuso in X;
• Y e connesso per la topologia indotta.
6

Lemma 1.3. Siano A,B ⊆ X sottoinsiemi aperti connessi tali che A∩B 6=∅. Allora l’unione A∪B e un aperto connesso di X. Lo stesso vale sostituendoconnesso con connesso per archi.
Dim. Supponiamo che A ∪ B non sia connesso. Allora esistono sottoin-siemi aperti disgiunti ed entrambi non vuoti R, S ⊆ A ∪B (aperti in A ∪B,e quindi anche in X) tali che A ∪ B = R ∪ S. In particolare, otteniamoA ⊆ R ∪ S e pertanto
A =(A ∩R
)∪(A ∩ S
).
Dal momento che A e connesso e che(A ∩ R
)∩(A ∩ S
)= ∅, deve essere
A ∩R = ∅ oppure A ∩ S = ∅. Nel primo caso, A ⊆ S.
Proposizione 1.2. Ogni spazio topologico localmente connesso e unione dis-giunta delle proprie componenti connesse.
Dim. Dimostriamo innanzitutto che X e unione disgiunta delle propriecomponenti connesse. Per x ∈ X sia Cx ⊆ τX la collezione di tutti i sottoin-siemi aperti di X connessi e contenenti x. Siccome X e localmente connesso,Cx e non vuoto. Per ogni x ∈ X poniamo
Sx =⋃U∈Cx
U.
In quanto unione di aperti, Sx e un sottoinsieme aperto di X.
Lemma 1.4.
2 Mappe C∞ e diffeomorfismi
E noto cosa significa che un’applicazione f : U → V con U ⊆ Rm e V ⊆ Rne C∞.
Definizione 2.1. Siano U ⊆ Rm, V ⊆ Rn sottoinsiemi aperti. Diremo cheuna funzione f : U → V e un diffeomorfismo (tra U e V ) se:
• f e C∞;
• f e biunivoca;
• l’inversa f−1 : V → U e anch’essa C∞.
Osservazione 2.1. Vedremo tra poco che se U e V sono diffeomorfi alloram = n.
7

Nella discussione delle varieta differenziabili, sara utile avere anche unanozione molto piu generale di mappa C∞ e di diffeomorfismo.
Definizione 2.2. Siano m,n ≥ 1 interi. Sia S ⊆ Rm un sottoinsieme arbi-trario. Una mappa f : S → Rn si dice C∞ se esistono:
• un aperto U ⊆ Rm con S ⊆ U ;
• una funzione C∞ (nel senso ordinario) f : U → Rn tale che
f∣∣∣S
= f,
cioe f(s) = f(s), per ogni s ∈ S.
In altre parole,
f : S → Rn e C∞ se e solo se si puo estendere a una mappa C∞ nel sensousuale su un intorno aperto di S in Rm.
Si puo vedere che la condizione espressa nella Definizione ?? e locale; inaltri termini, f : S → Rn e C∞ se e solo se e tale nell’intorno di ogni s ∈ So, piu precisamente, se e solo se per ogni s ∈ S esistono un aperto U ⊆ Rmcon s ∈ U e f : U → Rn C∞ tale che
f |S∩U = f∣∣∣S∩U
.
Possiamo ora definire mappe C∞ tra sottoinsiemi arbitrari di spazi Euclidei:
Definizione 2.3. Siano S ⊆ Rm e T ⊆ Rn sottoinsiemi arbitrari. Unamappa f : S → T si dice C∞ se e tale come applicazione S → Rn.
Lemma 2.1. Siano S ⊆ Rm, T ⊆ Rn, W ⊆ Rp e siano f : S → T ,g : T → W mappe C∞. Allora la composizione g ◦ f : S → W e anch’essaC∞.
Dim. Per ipotesi, esistono:
• un aperto S ⊆ Rm con S ⊆ S,
• un aperto T ⊆ Rn con T ⊆ T ,
• una funzione f : S → Rn che e C∞ nel senso ordinario ed estende f ,cioe f(s) = f(s), ∀ s ∈ S,
8

• una funzione g : T → Rp che e C∞ nel senso ordinario ed estende g,cioe g(t) = g(t), ∀ t ∈ T .
Inoltre, siccome f(S) ⊆ T ⊆ T si ha S ⊆ f−1(T ). Pertanto possiamo
sostituire se necessario S con S∩f−1(T ), cosı da poter supporre senza perdita
di generalita che S ⊆ f−1(T ). Quindi e ben definita e C∞ la composizione
g ◦ f : S → Rp. Chiaramente, per ogni s ∈ S abbiamo
g ◦ f(s) = g(f(s)
)= g
(f(s)
)(s ∈ S)
= g(f(s)
)(f(s) ∈ T )
= g ◦ f(s).
A questo punto, possiamo anche definire i diffeomorfismi tra sottoinsiemiarbitrari di spazi Euclidei.
Definizione 2.4. Siano m,n ≥ 1 interi. Siano S ⊆ Rm e T ⊆ Rn sottoin-siemi arbitrari. Una funzione f : S → T si dice un diffeomorfismo se f e C∞,biiettiva e con inversa C∞.
In altre parole, f e C∞ come applicazione S → Rn e l’inversa f−1 : T → S eanch’essa C∞ come applicazione T → Rn.
Esempio 2.1. La funzione f : R → R data da f(x) = x3 e C∞ e biiettiva,ma non e un diffeomorfismo. Infatti la funzione inversa, che e unica ed e datada f−1(x) = 3
√x, non e differenziabile in x = 0.
Esempio 2.2. La funzione f : [0,+∞) → [0,+∞) data da f(x) = x2 eC∞ e biiettiva, ma non e un diffeomorfismo. Infatti la funzione inversa, chee unica ed e data da f−1(x) = 2
√x, non puo essere estesa a una funzione
differenziabile su (−ε,+∞), per alcun ε > 0.
Esempio 2.3. Siano
S = (0, 2π)× {0} ⊆ R2,
T = S1 \ {1} ⊆ R2.
Sia f : S → T l’applicazione f(ϑ, 0) =(
cos(ϑ), sin(ϑ))t
. Allora f e undiffeomorfismo, con inversa g(eiθ) = (ϑ, 0) (ϑ ∈ (0, 2π)). Infatti f e chiara-mente C∞, essendo - per esempio - la restrizione a S di f : R2 → R2 data daf(x, y) =
(cos(x), sin(x)
). Inoltre e chiaro che f e biettiva, con inversa data
da g. D’altra parte, g e a sua volta la restrizione a T della funzione C∞
g : R2 \ {(x, 0) : x > 0} → (0, 2π)
ottenuta prendendo l’angolo ϑ nelle ordinarie coordinate polari (r, ϑ) di unpunto di R2 \ {(x, 0) : x > 0} (esplicitamente, g(x, y) = tan−1(y/x)).
9

Esempio 2.4. Siano
S = {(x, y) : x2 + y2 < 1} ⊆ R2,
T = {(x, y, z) ∈ R3 : x2 + y2 + z2 = 1, z > 0} ⊆ R3
e sia f : S → T data
f(x, y) = (x, y,√
1− x2 − y2)t.
Allora f e ovviamente C∞ (nel senso ordinario!), biettiva e l’inversa e larestrizione a T della proiezione (x, y, z) 7→ (x, y). Pertanto f e un diffeomor-fismo.
Esempio 2.5. Siano S ′ ⊆ S ⊆ Rm, T ′ ⊆ T ⊆ Rn e f : S → T un diffeomor-fismo. Se f(S ′) = T ′ e facile verificare che l’applicazione indotta S ′ → T ′
e anch’essa un diffeomorfismo. Per esempio, se nel caso precedente S ′ e unotto contenuto nel disco unitario S e vertice nell’origine (0, 0), T ′ sara unotto contenuto nell’emisfero superiore e vertice nel polo nord (0, 0, 1).
Le seguenti affermazioni sono ovvie:
Lemma 2.2. i):Un diffeomorfismo e un’applicazione continua, ed e quindi unomeomorfismo. ii): La composizione di diffeomorfismi e un diffeomorfismo:se S, T,W sono sottoinsiemi arbitrari di spazi Euclidei, e se f : S → T eg : T → W sono diffeomorfismi, tale e g ◦ f : S → W .
3 Il differenziale e il Teorema della Funzione
Inversa.
Definizione 3.1. Siano U ⊆ Rm e V ⊆ Rn aperti. Una funzione C∞ f : U →V e una n-upla (f1, . . . , fn)t di funzioni reali C∞ tali che (f1(x), . . . , fn(x))t ∈V per ogni x ∈ U . Il differenziale di f in a ∈ U e l’operatore lineare
daf : Rm → Rn
definito da
daf(v) = limt→0
f(a+ tv)− f(a)
t.
In termini delle basi canoniche, daf e rappresentato dalla matrice Jaco-biana:
Ja(f) =
∂f1∂x1
(a) · · · ∂f1∂xm
(a)...
. . ....
∂fn∂x1
(a) · · · ∂fn∂xm
(a)
.10

Osservazione 3.1. Ovviamente, se f : Rm → Rn e lineare, allora
(f(a+ tv)− f(a)) /t = f(v)
per ogni a, v ∈ Rm e t ∈ R \ {0}. Pertanto daf = f per ogni a ∈ Rm.
Esempio 3.1. Il differenziale di una funzione C∞
γ = (γ1, . . . , γk)t : (a, b) ⊆ R −→ Rk
in x ∈ (a, b) e l’applicazione lineare dxγ : R→ Rk rappresentata dalla matriceJacobiana
Jx(γ) =
γ′1(x)...
γ′k(x)
.Quindi
dxγ(t) = t ·
γ′1(x)...
γ′k(x)
= t · γ′(x) (t ∈ R).
Pertanto, il differenziale dxγ ∈ Hom(R,Rk) e la derivata γ′(x) ∈ Rk sonolegati dalla
γ′(x) = dxγ(1).
Esempio 3.2. Sia U ⊆ Rk aperto. Il differenziale di una mappa C∞
f : U −→ R
in a ∈ U e l’applicazione lineare daf : Rk → R rappresentata dalla matriceJacobiana
Ja(f) =[
∂f∂x1
(a) · · · ∂f∂xk
(a)].
Quindi, si ha
daf
x1
...xk
=
k∑i=1
xk∂f
∂xk(a)
x1
...xk
∈ Rk .
In particolare, le derivate parziali si ottengono da daf mediante la relazione
∂f
∂xi(a) = daf(ei),
ove e1, . . . , ek e la base standard di Rk.
11

Teorema 3.1. Siano Ui ⊆ Rni, i = 1, 2, 3 aperti. Siano f : U1 → U2 eg : U2 → U3 funzioni C∞. Allora g ◦ f : U1 → U3 e C∞ e per ogni x ∈ U1
abbiamodx(g ◦ f) = df(x)g ◦ dxf : Rn1 → Rn3 .
Corollario 3.1. Siano U ⊆ Rm e V ⊆ Rn aperti. Supponiamo che f : U →V sia C∞ e invertibile con inversa f−1 : V → U anch’essa C∞. Allora m = ne
df(x)(f−1) = (dxf)−1.
Osservazione 3.2. Il differenziale ha la seguente intepretazione geometrica:se a ∈ U e
γ : (−ε, ε) −→ U
e una qualsiasi curva C∞ tale che γ(0) = a, sia v = dγdt
∣∣0
il vettore velocita altempo t = 0. La composizione
γ =: f ◦ γ : (−ε, ε) −→ V
e una curva C∞ tale che γ(0) = f(a). Otteniamo
γ′(0) = d0(f ◦ γ)(1) = daf ◦ d0γ(1) = daf (γ′(0)) = daf(v).
In particolare, in virtu del Corollario ??, un diffeomorfismo ha differen-ziale invertibile in ogni punto del proprio dominio. Il viceversa e falso: con-sideriamo ad esempio l’applicazione f : R2 \ {0} −→ R2 \ {0} data da
f
((xy
))=
(x2 − y2
2xy
).
La matrice Jacobiana in a = (x, y)t e
Ja(f) =
[2x −2y2y 2x
],
con determinante 4(x2+y2), ovunque 6= 0 su R2\{0}; quindi daf e invertibilein ogni a ∈ R2\{0}. Tuttavia, f(−x,−y) = f(x, y) per ogni (x, y)t: pertantof non e iniettiva. Tuttavia almeno localmente nel dominio una mappa condifferenziale invertibile puo essere effettivamente invertita.
Teorema 3.2. (DELLA FUNZIONE INVERSA.)Sia U ⊆ Rn aperto. Siaf : U → Rn una funzione C∞. Sia x ∈ U . Supponiamo che dxf : Rn → Rnsia un isomorfismo. Allora esistono aperti U1 ⊆ U, V ⊆ Rn con x ∈ U1,f(x) ∈ V tali che f(U1) = V , f1 =: f |U1 : U1 → V e una biiezione ef−11 : V → U1 e C∞.
12

Definizione 3.2. Nelle ipotesi del Teorema ??, l’applicazione liscia f : U →V si dice un diffeomorfismo locale in x ∈ U .
Definizione 3.3. Un’applicazione liscia f : U → V (con U, V ⊆ Rk apertisi dice un diffeomorfismo locale se e un diffeomorfismo locale in ogni x ∈ U ,cioe se il differenziale dxf : Rn → Rn e un isomorfismo per ogni x ∈ U .
I diffeomorfismi locali godono di un’importante proprieta topologica.
Definizione 3.4. Siano (A, τA) e (B, τB) spazi topologici. Un’applicazionecontinua f : A → B si dice aperta se per ogni sottoinsieme aperto A′ ⊆ Al’immagine f(A′) ⊆ B e un sottoinsieme aperto di B.
Esempio 3.3. La funzione f : R → R data da f(x) = x2 non e aperta:f((−1, 1)) = [0, 1). Si noti che f non e un diffeomorfismo locale in 0.
Tuttavia dal teorema della Funzione Inversa deduciamo il seguente:
Corollario 3.2. Un diffeomorfismo locale e una funzione aperta.
Dim. Sia f : U → V un diffeomorfismo locale tra aperti U, V ⊆ Rn. Di-mostriamo innanzitutto che f(U) ⊆ V e aperto (in V , quindi in Rn). Siaq ∈ f(U). Esiste per definizione p ∈ U tale che f(p) = q. Poiche f e undiffeomorfismo locale, e tale in particolare in p. Quindi per il Teorema dellaFunzione Inversa esistono aperti U ′ ⊆ U e V ′ ⊆ V tali che p ∈ U ′, q ∈ V ′ ef induce un diffeomorfismo U ′ → V ′. Percio V ′ = f(U ′) ⊆ f(U) e un apertocontenente q e contenuto in f(U). Quindi f(U) contiene un intorno apertodi ogni suo punto ed e, pertanto, aperto.
Se ora U ′ ⊆ U e un aperto arbitrario, la restrizione di f a U ′ e ancoraun diffeomorfismo locale; applicando le considerazioni precedenti con U ′ inluogo di U , deduciamo che f(U ′) e aperto.
Esempio 3.4. La funzione f : R → R data da f(x) = x3 e aperta, ma fnon e un diffeomorfismo locale in 0.
Corollario 3.3. Un diffeomorfismo locale biiettivo e necessariamente un dif-feomorfismo.
Dim. f ammette un’inversa globale, che deve essere uguale (per l’unicitadell’inversa) alle funzioni inverse locali la cui esistenza e stabilita dal teoremadella funzione inversa. Siccome queste sono C∞, f e essa stessa C∞.
Esempio 3.5. Sia f : R2 → R2 l’applicazione
f((r, ϑ)t
)=(r cos(ϑ), r sin(ϑ)
)t.
13

La matrice Jacobiana di f in (r, ϑ)t e data da
J(r,ϑ)t(f) =
[cos(ϑ) −r sin(ϑ)sin(ϑ) r cos(ϑ)
].
Il determinante e r, e quindi f e un diffeomorfismo locale in ogni (r, ϑ)t
con r 6= 0. Se ad esempio ci restringiamo al semipiano r > 0, essendo unabiiezione con la sua immagine f induce per ogni ϑ0 fissato un diffeomorfismotra (0,+∞)×(ϑ0−π, ϑ0+π) e il complementare Sϑ0 ⊆ R2\{0} della semirettaper l’origine con coordinata angolare ϑ0 + π. Denoteremo arg(z) la secondacomponente del diffeomorfismo inverso:
f−1(z) =
(|z|
arg(z)
)(z ∈ Sϑ0).
Esempio 3.6. (Punti critici non degeneri) Sia U ⊆ Rn un aperto esia f : U → R una funzione C∞. In ogni a ∈ U , il differenziale di f eun’applicazione lineare daf : Rn → R, ossia un elemento dello spazio duale(Rn)∗. Poniamo Rn = (Rn)∗. Il differenziale di f induce un applicazione
Df : U → Rn, a ∈ U 7→ Df (a) =: daf.
Se C = {e1, . . . , en} e la base standard di Rn e C∗ = {e∗1, . . . , e∗n} la base dualedi Rn, abbiamo
Df (a) = daf =n∑i=1
∂f
∂xi(a) e∗i .
Pertanto, identificando Rn con Rn mediante la base C∗, scriveremo
Df (a) =
∂f∂x1
(a)...
∂f∂xn
(a)
(a ∈ U).
La matrice Jacobiana di Df in a ∈ U e allora Ja(Df ) = Ha(f), ove denotiamoHa(f) la matrice simmetrica n× n
Ha(f) =
∂2f∂x21
(a) · · · ∂2f∂x1∂xn
(a)...
. . ....
∂2f∂xn∂x1
(a) · · · ∂2f∂x2n
(a)
. (3)
Scriveremo Ha(f) per tale matrice e la chiameremo la matrice Hessiana dif in a. Quindi se Ha(f) e non singolare allora Df e un diffeomorfismo locale.
14

Supponiamo in particolare che a ∈ U sia un punto critico di f , cioeDf (a) = daf = 0. Diremo che a e un punto critico non degenere di f seHa(f) e non singolare. Altrimenti, diremo che a e un punto critico degeneredi f .
Se a e un punto critico non degenere, per il teorema della funzione inversaesistono aperti U ′ ⊆ U e V ⊆ Rn con a ∈ U ′ e 0 ∈ V tali che Df induce undiffeomorfismo U ′ → V . Quindi a e l’unico punto di U ′ nell’immagine inversadi 0 per Df . In altri termini, ogni punto critico non degenere ha un intornoaperto non contenente altri punti critici di f : i punti critici non degeneri sonopunti critici isolati. I punti critici degeneri possono essere isolati o meno.
Per esempio,i): 0 ∈ R2 e un punto critico non degenere di f(x, y) = x2 + y2;ii) 0 ∈ R2 e un punto critico non degenere di h(x, y) = x2 − y2;iii): 0 ∈ R2 e un punto critico degenere di g(x, y) = x2, e non e un puntocritico isolato di g ;iv): 0 ∈ R2 e un punto critico degenere di κ(x, y) = x2 + y3, ma e un puntocritico isolato di κ.
Consideriamo ora la matrice Hessiana di una composizione f ◦ϕ, essendoϕ : V → U una mappa C∞ con V ⊆ Rm aperto.
Sia quindi p ∈ U un punto critico di f e sia a ∈ V tale che ϕ(a) = p.Siano y1, . . . , ym coordinate lineari su V ⊆ Rm e x1, . . . , xn coordinate linearisu U ⊆ Rn. Abbiamo, per la regola della catena,
∂(f ◦ ϕ)
∂yi(a) =
n∑k=1
∂f
∂xk(p)
∂ϕk∂yi
(a) (1 ≤ i ≤ m).
Naturalmente, questa relazione si puo scrivere in forma matriciale Ja(f ◦ϕ) =Jp(f) · Ja(ϕ), ovvero da(f ◦ ϕ) = dp(f) ◦ daϕ. In particolare, a e un puntocritico di f ◦ ϕ se p e un punto critico di f .
Supponiamo allora che p sia un punto critico di f e confrontiamo le matriciHessiane di f in p e di f ◦ ϕ in a. Passando alle derivate seconde abbiamoper 1 ≤ i, j ≤ m:
∂2(f ◦ ϕ)
∂yi∂yj(a) =
∂
∂yi
(∂(f ◦ ϕ)
∂yj
)(a)
=∂
∂yi
[n∑k=1
(∂f
∂xk◦ ϕ)· ∂ϕk∂yj
](a)
=n∑k=1
∂
∂yi
(((∂kf) ◦ ϕ
)· ∂ϕk∂yj
(a)
)(a),
15

ove si e posto ∂kf = ∂f∂xk
. Iterando e usando la regola di Leibnitz,
∂2(f ◦ ϕ)
∂yi∂yj(a) =
n∑k=1
[(∂kf) ◦ ϕ(a) · ∂
2ϕk∂yj∂yi
(a)
]+
n∑k,l=1
∂2f
∂xk∂xl(ϕ(a)) · ∂ϕl
∂yi(a) · ∂ϕk
∂yj(a).
Ricordando che p = ϕ(a), abbiamo quindi
∂2(f ◦ ϕ)
∂yi∂yj(a) =
n∑k=1
[(∂kf)(p) · ∂
2ϕk∂yj∂yi
(a)
]+
n∑k,l=1
∂2f
∂xk∂xl(p) · ∂ϕl
∂yi(a) · ∂ϕk
∂yj(a)
Supponiamo ora che p = ϕ(a) sia un punto critico di f , cioe dpf = 0. Allora∂kf(p) = 0 per ogni k = 1, . . . , n e quindi rimane solo il secondo termine.
In forma matriciale, scriviamo Ha(f ◦ ϕ)ij = ∂2(f◦ϕ)∂yi∂yj
(a), Hp(f)kl = ∂2f∂xk∂xl
(p),
Jp(ϕ)ki = ∂ϕk∂yj
(a). Otteniamo
Ha(f ◦ ϕ)ji =n∑
k,l=1
Hp(f)kl · Ja(ϕ)li · Ja(ϕ)kj
=n∑
k,l=1
Ja(ϕ)tjk ·Hp(f)kl · Ja(ϕ)li,
ovvero
Ha(f ◦ ϕ) = Ja(ϕ)t ·Hp(f) · Ja(ϕ). (4)
In particolare, se m = n e ϕ e un diffeomorfismo locale, la matrice Ja(ϕ)e invertibile e quindi Ha(f ◦ ϕ) e invertibile se e solo se tale e Hp(f). Inaltri termini, se ϕ e un diffeomorfismo locale allora a e un punto critico nondegenere di f ◦ϕ se e solo se p e un punto critico non degenere di f . Inoltre,le due matrici Hessiane Ha(f ◦ ϕ) e Hp(f) sono cogradienti e quindi hannogli stessi indici di positivita (ossia lo stesso numero di autovalori positivi,contati con le appropriate molteplicita).
Il differenziale in un dato punto, in un certo senso (piu precisamente: ameno di diffeomorfismi locali) determina completamente il comportamentodi una funzione C∞ nell’intorno del punto stesso. Illustreremo ora questoprincipio nel caso di punti di sommersivita (differenziale suriettivo) e puntidi immersivita (differenziale iniettivo).
16

3.1 La formula di Taylor
Proposizione 3.1. Sia U ⊆ Rn aperto. Sia ϕ : U → R una funzione C∞.Supponiamo a, a+ x ∈ U e che l’intero segmento [a, a+ x] =: {a+ tx : 0 ≤t ≤ 1} sia contenuto in U . Allora
ϕ(a+ x) = ϕ(a) + daϕ(x) +
∫ 1
0
(1− t) ∂2
∂t2ϕ(a+ tx) dt.
Dim. Integriamo per parti. Otteniamo∫ 1
0
(1− t) ∂2
∂t2ϕ(a+ tx) dt = (1− t) ∂
∂tϕ(a+ tx)
∣∣∣∣10
+
∫ 1
0
∂
∂tϕ(tx) dt
= −daϕ(x) +
∫ 1
0
∂
∂tϕ(a+ tx) dt
= ϕ(a+ x)− ϕ(a)− daϕ(x),
usando nel penultimo passaggio la definizione di differenziale e nell’ultimo ilTeorema Fondamentale del Calcolo Integrale.
4 Sommersioni locali; valori regolari.
Ritorniamo ora al caso piu familiare di funzioni definite su aperti di unospazio euclideo.
Definizione 4.1. (Punti di Sommersivita.) Sia f : U → Rn un’applicazioneC∞ su un aperto U ⊆ Rm. Un punto u ∈ U si dice un punto di sommersivitadi f se duf : Rm → Rn e suriettivo. Diremo che f e una sommersione seduf e suriettivo per ogni u ∈ U .
Lemma 4.1. Nelle ipotesi della Definizione ??, l’insieme
Somm(f) = {u ∈ U : f e sommersiva in u}
e aperto (in U , quindi in Rm).
Dim. Se m < n, Somm(f) e vuoto e non c’e nulla da dimostrare. Altri-menti,
Somm(f) = {u ∈ U : Ju(f) ha rango n}
17

e l’insieme degli u ∈ U tali che la matrice Jacobiana Ju(f) (che e n × m)contiene un minore n × n invertibile. Quindi se u ∈ Somm(f), esistono1 ≤ i1 < . . . < im ≤ m tali che
det
∂i1f1(u) · · · ∂inf1(u)∂i1f2(u) · · · ∂inf2(u)
.... . .
...∂i1fn(u) · · · ∂infn(u)
6= 0, (5)
essendo ∂k = ∂xk
. La funzione (??) e C∞ (esercizio!). Pertanto, se essa e nonnulla in u, e non nulla in ogni u′ ∈ U ′ per un opportuno aperto U ′ ⊆ U conu ∈ U . Quindi Somm(f) contiene un intorno aperto di ogni suo punto, ed epertanto un aperto.
Esempio 4.1. La piu ovvia delle sommersioni e la proiezione
π : Rm ∼= Rn × Rm−n → Rn,(xy
)7→ x
sul primo fattore (si ricordi l’Osservazione ??).
Definizione 4.2. Sia U ⊆ Rm un aperto e sia f : U → Rn un’applicazioneC∞. Diremo che y ∈ Rn e un valore regolare di f se
dxf : Rm → Rn
e suriettivo per ogni x ∈ f−1(y). Diremo che y ∈ Rn e un valore singolarese non e un valore regolare.
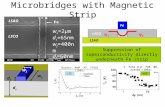
Esempio 4.2. Sia f : R2 → R la mappa data da
f
((xy
))= x2 − y2.
La matrice Jacobiana di f in p = (x, y, z)t e data da
Jp(f) =[
2x −2y].
Quindi dpf : R2 → R e suriettivo, ossia f e sommersiva in p, se e solo sep = (x, y) 6= (0, 0). Abbiamo
f
((00
))= 0,
18

Figure 1: z = x2 − y2
Figure 2: f−1(−0.5)
e quindi 0 ∈ R e l’unico valore singolare di f . La figura ?? mostra il grafo dif . L’immagine inversa f−1(−0.5) e la proiezione in R2 dell’intersezione delgrafo di f con il piano orizzontale z = −0.5, ossia l’iperbole non degenerex2 − y2 = −0.5 (Fig. ??). L’immagine inversa f−1(0) e la proiezione in R2
dell’intersezione del grafo di f con il piano orizzontale z = 0, ossia l’iperboledegenere x2 − y2 = 0, data dall’unione delle due rette x = y e x = −y (Fig.??). L’immagine inversa f−1(0.5) e la proiezione in R2 dell’intersezione del ilgrafo di f con il piano orizzontale z = 0.5, ossia l’iperbole non degenere x2−y2 = 0.5 (Fig. ??). Notiamo che le immagini inverse dei valori regolari sonocurve non degeneri (liscie) nel piano, mentre l’immagine inversa dell’unicovalore singolare e una curva singolare.
Esempio 4.3. Sia f : R3 → R3 data da
f
xyz
=
x2
xyy2 + z2
.
La matrice Jacobiana di f in p = (x, y, z)t e data da
Jp(f) =
2x 0 0y x 00 2y 2z
.Quindi dpf : R3 → R3 e suriettivo se e solo se xz 6= 0. Abbiamo
f
0yz
=
00
y2 + z2
,
Figure 3: f−1(0)
19

Figure 4: f−1(0.5)
e quindi l’immagine del piano yz e il semiasse
A =:
0
0z
: z ≥ 0
.
Abbiamo inoltre
f
xy0
=
x2
xyy2
,
e quindi l’immagine del piano xy e l’insieme dei punti sulla superficie
B =:
x
yz
: y2 = xz, x ≥ 0, y ≥ 0, z ≥ 0
.
I valori singolari di f sono quelli in A ∪B.
Esempio 4.4. Sia f : R4 → R2 data da
f
xyzt
=
(xyzt
).
Se p = (x, y, z, t)t si ha
Jp(f) =
[y x 0 00 0 t z
].
Quindi il rango e < 2 se e solo se (x, y) = (0, 0) (sul piano zt) ovvero se(z, t) = (0, 0) (sul piano xy). Si ha
f
00zt
=
(0zt
),
f
xy00
=
(xy0
).
Quindi il luogo dei valori singolari di f e l’unione degli assi coordinati.
20

Esercizio 4.1. Si classifichino i punti di sommersivita e i valori regolari delleseguenti funzioni:
i): f(x1, . . . , xn) =∑
i x2i ;
ii): f(x, y, z) = x2 − y2 − z2;iii): f(x, y, z) = (exp(x+ y2 − z3), y + z6).Quali di queste sono sommersioni?
Teorema 4.1. (Sard) L’insieme dei valori singolari di f ha misura nulla inRn.
Chiaramente, se n > m i valori regolari sono quelli per i quali f−1(y) = ∅,e quindi abbiamo il seguente
Corollario 4.1. Se m < n, l’immagine di f ha misura nulla in Rn.
Corollario 4.2. Se f(U) non ha misura nulla in Rn, esiste un aperto nonvuoto U ′ ⊆ U tale che f e sommersiva in ogni m ∈ U ′.
Dim. Supponiamo Somm(f) = ∅. Allora y ∈ Rn e un valore regolare dif se e solo se y 6∈ f(U), cioe f−1(y) = ∅. Quindi f(U), essendo l’insieme deivalori singolari, ha misura nulla per il teorema di Sard, contro le ipotesi.
Pertanto, Somm(f) 6= ∅. Dato che Somm(f) e aperto, l’asserto e di-mostrato.
Mostreremo ora che, dopo un opportuno cambiamento di coordinate (lo-calmente definito), ogni sommersione locale prende la forma di una proiezione.Piu precisamente, vale la seguente affermazione, nota anche come teoremadella sommersione locale:
Teorema 4.2. Sia U ⊆ Rm un aperto, f : U → Rn un’applicazione C∞.Supponiamo che f sia sommersiva in un dato u ∈ U . Allora esistono
• un aperto U ′ ⊆ U di Rm con u ∈ U ′,
• un aperto V ⊆ Rm,
• un diffeomorfismo g : V → U ′,
tali che la composizione f ◦ g : V → Rn e la proiezione sulle prime n compo-nenti, ristretta a V .
Prima di vedere la dimostrazione, consideriamo il seguente esempio algebro-lineare:
21

Esempio 4.5. Sia F : Rm → Rn lineare e suriettiva (quindi m ≥ n). PoichedxF = F per ogni x ∈ Rm, F e una sommersione. Sia C = {e1, . . . , en} labase canonica di Rn. Esplicitamente,
e1 =
10...0
, . . . , en =
0...01
.
Sia {v1, . . . , vm−n} una base per ker(F ) e siano w1, . . . , wn ∈ Rm tali cheF (wi) = ei per ogni i = 1, . . . , n (tali wi esistono perche F e suriettiva,e ogni wi e determinato a meno di un elemento nel nucleo). Allora B =:{w1, . . . , wn, v1, . . . , vm−n} e una base di Rn. Pertanto l’applicazione lineareG : Rm → Rm definita da
G
x1
...xm
=:
n∑i=1
xiwi +m−n∑i=1
xi+nvi
e un automorfismo lineare. La composizione F ◦G : Rm → Rn e data da
F ◦G
x1
...xm
= F
(n∑i=1
xiwi +m−n∑i=1
xi+nvi
)
=n∑i=1
xiF (wi) +m−n∑i=1
xi+nF (vi)
=n∑i=1
xiF (wi)
=n∑i=1
xiei =
x1...xn
.
Quindi, componendo a destra una sommersione lineare (applicazione linearesuriettiva) per un opportuno diffeomorfismo lineare (applicazione lineare in-vertibile) si ottiene la proiezione dell’esempio ??.
Dimostrazione del Teorema ??. Per ipotesi, la matrice Jacobiana Ju(f)
22

ha rango massimo:
rango
∂1f1(u) · · · ∂mf1(u)∂1f2(u) · · · ∂mf2(u)
.... . .
...∂1fn(u) · · · ∂mfn(u)
= n,
essendo ∂jfi =: ∂fi∂xj
. Possiamo pertanto estrarre un minore n× n invertibile
dalla matrice Jacobiana; in altre parole, esistono indici i1 < . . . < in ∈{1, . . . ,m} tali che la matrice n× n
∂i1f1(u) · · · ∂inf1(u)∂i1f2(u) · · · ∂inf2(u)
.... . .
...∂i1fn(u) · · · ∂infn(u)
(6)
ha rango massimo, ovvero e invertibile. Senza perdita di generalita, even-tualmente dopo avere riordinato gli indici delle variabili, possiamo supporreij = j per ogni j = 1, . . . , n. Quindi, la matrice
∂1f1(u) · · · ∂nf1(u)∂1f2(u) · · · ∂nf2(u)
.... . .
...∂1fn(u) · · · ∂nfn(u)
(7)
e invertibile. Scriviamo il generico punto x ∈ Rm come
x =
(x′
x′′
)con x′ ∈ Rn, x′′ ∈ Rm−n.
Lemma 4.2. Consideriamo l’applicazione h : U → Rm definita da
h(x) =
(f(x)x′′
)(x ∈ U).
Allora h e un diffeomorfismo locale in u.
Dim. La matrice Jacobiana di f in u e
Ju(f) =
∂1f1(u) · · · ∂nf1(u) ∂n+1f1(u) · · · ∂mf1(u)...
. . ....
.... . .
...∂1fn(u) · · · ∂nfn(u) ∂n+1fn(u) . . . ∂mfn(u)
0 · · · 0 1 · · · 0...
. . ....
.... . .
...0 · · · 0 0 · · · 1
, (8)
23

chiaramente invertibile. Quindi h e un diffeomorfismo locale in u.
Pertanto, applicando il teorema dell’immagine inversa, otteniamo:
Corollario 4.3. Esistono aperti U ′ ⊆ U e V ⊆ Rm con u ∈ U ′ e h(u) ∈ V ,tali che h induce un diffeomorfismo (che denotiamo ancora con h)
h : U ′ → V.
Sia g : V → U ′ il diffeomorfismo inverso. Per ogni
y =
(y′
y′′
)∈ V,
x = g(y) e l’unico elemento di U tale che h(x) = y. Quindi,
y′ = f(x), y′′ = x′′.
Pertanto la composizionef ◦ g : V → Rn
soddisfa
f ◦ g(y) = f(x)
= y′.
Il teorema ?? e dimostrato.
Corollario 4.4. Una sommersione e una mappa aperta.
Dim. Innanzitutto, per n ≤ m sia π : Rm → Rn la proiezione sulle primen componenti. Allora π e una mappa aperta. Scriviamo infatti il genericox ∈ Rm come x = (x′, x′′) con x′ ∈ Rn e x′′ ∈ Rm−n. Allora dato U ⊆ Rmaperto e p ∈ U , abbiamo π(p) = p′. D’altra parte, essendo U aperto esisteε > 0 tale che ‖p− q‖ < ε implica q ∈ U . In particolare, se p = (p′, p′′) alloraU contiene tutti i punti della forma (q′, p′′) con ‖q′− p′‖ < ε (in quest’ultimastima, si usa la norma in Rn). Quindi π(U) contiene tutti i punti q′ ∈ Rn con‖q′− p′‖ < ε. Questo dimostra che per ogni p ∈ U l’immagine π(U) contieneun intorno aperto di π(p) = p′ ed e pertanto un aperto di Rn.
Sia ora f : U → V una sommersione, con U ⊆ Rm e V ⊆ Rn aperti.Dimostriamo che f(U) ⊆ V e aperto (in V , quindi in Rn). Sia q ∈ f(U).Esiste allora p ∈ U con q = f(p). Esistono per il teorema aperti U ′, U ′′ ⊆ Rmcon p ∈ U ′ ⊆ U e un diffeomorfismo g : U ′′ → U ′ tali che la composizione f ◦g : U ′′ → V e la restrizione a U ′′ della proiezione π sulle prime n componenti.
24

Ma allora, per quanto detto sopra, f(U ′) = f(g(U ′′)) = f ◦ g(U ′′) = π(U ′′) eun aperto di V contenente q e contenuto in f(U). Quindi f(U) contiene unintorno aperto di ogni suo punto ed e, pertanto, aperto.
Infine, per dimostrare che f(S) e aperto in Rn per ogni aperto S ⊆ Ubasta osservare che la restrizione di f a S e una sommersione f |S : S → V eapplicare le osservazioni precedenti.
C.V.D.
Consideriamo ora l’informazione che il teorema della sommersione localefornisce riguardo alla struttura locale degli spazi immagine inversa (o fibre)f−1(b), b ∈ Rn, nell’intorno di un dato punto di sommersivita.
Corollario 4.5. Sia U ⊆ Rm un aperto, e sia f : U → Rn una funzione C∞.Sia u ∈ U un punto di sommersivita di f . Sia b = f(u). Allora esistono:
• un aperto U ′ ⊆ U con u ∈ U ,
• un aperto A ⊆ Rn−m e
• un diffeomorfismo φ : A −→ f−1(b) ∩ U ′.
Dim. Siano U ′, V e g : V → U ′ come nell’asserto del Teorema dellasommersione locale. Sia h = g−1 : U ′ → V il diffeomorfismo inverso. Alloraper ogni x ∈ U ′ il punto v = h(x) e l’unico punto di V che soddisfa g(v) = x,e si ha v′ = f(x). Quindi, x ∈ f−1(b)⇔ v′ = b e pertanto
f−1(b) ∩ U ′ = g
({(v′
v′′
)∈ V : v′ = b
})= g(V ∩ Rn−mb ),
essendo Rn−mb = {b} × Rn−m uno spazio affine (n − m)-dimensionale. Seidentifichiamo nel modo ovvio Rn−mb con Rn−m, l’intersezione A =: V ∩Rn−mb
e un aperto di V ∩Rn−mb , e le restrizioni di g e h a A e f−1(b)∩U ′ fornisconoapplicazioni C∞ A → f−1(b) ∩ U ′ e f−1(b) ∩ U ′ → A che sono una l’inversadell’altra, e pertanto sono diffeomorfismi.
C.V.D.
Ovviamente, S =: f−1(b) ∩ U ′ e un aperto di f−1(b) contenente u. Per-tanto, il Corollario ?? si puo riformulare come segue:
Corollario 4.6. Sia U ⊆ Rm un aperto, e sia f : U → Rn una funzione C∞.Sia u ∈ U un punto di sommersivita di f . Sia b = f(u). Allora esistono:
• un aperto S ⊆ f−1(b) con u ∈ U ,
25

• un aperto A ⊆ Rn−m e
• un diffeomorfismo φ : A −→ S.
In particolare, supponiamo che b ∈ V sia un valore regolare di f . Appli-cando quanto precede a ogni a ∈ U con f(a) = b, otteniamo
Corollario 4.7. Sia b ∈ V un valore regolare di f . Allora f−1(b) ⊆ U haun ricoprimento aperto {Si}i∈I con la seguente proprieta: Per ogni i ∈ Iesistono aperti Ai ⊆ Rm−n e diffeomorfismi φi : Ai → Si.
Chiameremo ogni diffeomorfismo φi : Ai → Si una parametrizzazionelocale, o una carta locale.
Supponiamo Si ∩Sj 6= ∅. Allora Si ∩Sj e un aperto non vuoto di f−1(b),sul quale sono definite due parametrizzazioni:
φ′i : φ−1i (Si ∩ Sj) ⊆ Ai → Si ∩ Sj
eφ′j : φ−1j (Si ∩ Sj) ⊆ Aj → Si ∩ Sj.
φ′i e φ′j si ottengono ovviamente per restrizione di φi e φj, rispettivamente, e
sono anch’essi dei diffeomorfismi tra gli aperti φ−1i (Si ∩ Sj), φ−1j (Si ∩ Sj) ⊆Rm−n e Si ∩ Sj. La relazione tra le due parametrizzazioni e espressa dallacomposizione
(φ′j)−1 ◦ φ′i : φ−1i (Si ∩ Sj)→ φ−1j (Si ∩ Sj),
che essendo una composizione di diffeomorfismi e essa stessa un diffeomor-fismo.
Esempio 4.6. Consideriamo l’applicazione g : R2 → R data da f((x, y)t
)=
x2 + y2. I valori regolari sono tutti i reali 6= 0, 0 e il solo valore singolare. Sia(x0, y0)
t 6= 0 e poniamo ϑ0 = tan−1(y0/x0). Allora l’applicazione f((r, ϑ)
)=
(√r cos(ϑ),
√r sin(ϑ)) definisce un diffeomorfismo tra (0,+∞)×(ϑ0−π, ϑ0+
π) e il complementare della semiretta (chiusa) di coordinata angolare ϑ0 +π.La composizione g ◦ f e la mappa (r, ϑ)t 7→ r.
Esercizio 4.2. Si ripeta l’analisi precedente per le applicazioni g : R3 →R data da g
((x, y, z)t
)= x2 + y2 e κ : R3 → R2 data da κ
((x, y, z)t
)=(
x2 + y2
z
), facendo uso delle coordinate cilindriche, e per l’applicazione
h : R3 → R data da h((x, y, z)t
)= x2 + y2 + z2, facendo uso delle coordinate
sferiche.
26

Esempio 4.7. Consideriamo l’applicazione f : R2 → R data da f((x, y)t
)=
x− y2. La matrice Jacobiana in p = (a, b)t e
Jp(f) =[
1 −2b],
che ha sempre rango 1. Quindi f e una sommersione. Sia g : R2 → R2 datada
g
((xy
))=
(x+ y2
y
) ((xy
)∈ R2
).
La matrice Jacobiana di g in p = (a, b)t e
Jp(g) =
[1 2b0 1
],
che e invertibile in ogni (a, b)t. Quindi g e un diffeomorfismo locale ed essendochiaramente biunivoca (dimostrare) e un diffeomorfismo (trovare la funzioneinversa e verificare che e C∞). Si ha
f ◦ g((
xy
))= x
((xy
)∈ R2
),
la proiezione sulla prima componente.
Definizione 4.3. Sia f : A→ B una mappa tra due insiemi. Una sezionedi f e una mappa σ : B → A tale che f ◦σ = idB. Supponiamo ore che B siauno spazio topologico (per esempio, B ⊆ Rk con la topologia indotta). Unasezione locale di f nell’intorno di un dato b ∈ B e una sezione della mappaindotta f−1(B′)→ B′, ove B′ ⊆ B e un intorno aperto di b. In altre parole,una sezione locale di f nell’intorno di b ∈ B e una mappa σ : B′ → A taleche f ◦ σ = idB′ , essendo B′ ⊆ B un aperto di B contenente b.
Una sommersione locale ammette sempre una sezione locale:
Corollario 4.8. Sia U ⊆ Rm un aperto. Sia f : U → Rn una mappa C∞.Sia u ∈ U un punto di sommersivita per f . Sia b = f(u). Allora esistono:
• un aperto B ⊆ Rn con b ∈ B e
• una mappa C∞ σ : B → U
tali che σ(b) = u e f ◦ σ = idB.
27

Dim. Sia g : V → U ′ come nel teorema della sommersione locale. SiaB′ =: f ◦ g(V ) = f(U ′). Siccome una sommersione locale e aperta, B′ eun aperto di Rn. Per il Teorema della sommersione locale, esistono apertiU ′′ ⊆ Rn e U ′ ⊆ U con a ∈ U ′ e un diffeomorfismo g : U ′′ → U ′ tale che lacomposizione f ◦g : U ′′ → Rn e la restrizione a U ′′ della proiezione sulle primen componenti. Sia v ∈ U ′′ l’unico punto di U ′′ tale che g(v) = a. Quindiv = (b, c), con c ∈ Rm−n. Possiamo allora scegliere V ⊆ f(U ′) intorno apertoabbastanza piccolo di b e porre σ(b′) = g(b′, c).
Diamo ora un’applicazione del Teorema della Sommersione Locale allostudio del comportamento locale di una funzione reale C∞ nell’intorno di unpunto critico non degenere. Porremo per δ > 0 e v ∈ Rn
Bn(v, δ) = {x ∈ Rn : ‖x− v‖ < δ} .
Proposizione 4.1. (Lemma di Morse) Sia U ⊆ Rn un aperto e sia f :U → R una funzione C∞. Sia a ∈ U un punto critico non degenere di f .Allora esistono un intero 0 ≤ k ≤ n, dipendente solo da f e x, un apertoU ′ ⊆ U con a ∈ U ′ e un diffeomorfismo ψ : Bn(0, δ)→ U ′ per qualche δ > 0,tali che ψ(0) = a e
f ◦ ψ(x) = f(a) + x21 + · · ·+ x2k − x2k+1 − . . .− x2n (x ∈ Bn(0, δ)).
Dim. Supponiamo innanzitutto che esista qualche diffeomorfismo ψ comenell’asserto e dimostriamo che k dipende solo da f e a, e non da una partico-lare scelta di ψ. Sia ψ : Bn(0, δ)→ U ′, per qualche δ > 0, un diffeomorfismotale che ψ(0) = a e
f ◦ ψ(x) = f(a) + x21 + · · ·+ x2k − x2k+1 − . . .− x2n (x ∈ Bn(0, δ)).
Allora 0 ∈ Rn e un punto critico di f ◦ ψ e la matrice Hessiana H0(f ◦ ψ) dif ◦ψ in 0 e la matrice diagonale n×n con le prime k entrate diagonali ugualia 2 e le ultime n − k entrate uguali a −2. Quindi l’indice di positivita diH0(f ◦ψ) e k. D’altra parte, data (??) le matrici Hessiane Ha(f) e H0(f ◦ψ)sono cogradienti e hanno pertanto lo stesso indice di positivita. Quindi k el’indice di positivita di Ha(f) e dipende solo da f e a (e non dalla particolarescleta di ψ).
Dimostriamo ora che esistono effettivamente diffeomorfismi ψ come as-serito. Sia δ > 0 tale che Bn(a, δ) ⊆ U . Applicando la formula di Taylor
28

descritta nella Proposizione ?? e considerando che daf = 0 , otteniamo perogni h ∈ Bn(0, δ):
f(a+ h) = f(a) +
∫ 1
0
(1− t) ∂2
∂t2f(a+ th) dt.
D’altra parte, usando la regola della catena per la derivazione di funzionicomposte si ricava
∂2
∂t2f(a+ th) =
∑ij
∂2f
∂xi∂xj(a+ th)hihj.
Otteniamo cosı
f(a+ h) = f(a) +∑i,j
qij(h)hihj = f(a) + htQ(h)h,
essendo h = (h1, . . . , hn)t ∈ Bn(0, δ) e Q(h) = [qij(h)], con
qij(h) =
∫ 1
0
(1− t) ∂2f
∂xi∂xj(a+ th) dt.
Chiaramente, Q(0) = 12Ha(f).
Dato che Ha(f) e simmetrica, per il teorema spettrale esiste una matriceortogonale R ∈Mn(R) tale che RtHa(f)R e diagonale, con le prime k entratediagonali positive e le ultime n− k entrate negative. Esiste poi una matricediagonale S con entrate diagonali tutte positive tale che St(RtHa(f)Rt)St =(RS)tHa(F )(RS) e diagonale con le prime k entrate uguali a 1 e le ul-time n − k uguali a −1: basta prendere la j-ma entrata diagonale di Suguale a 1/
√|kj|, ove kj e la j-ma entrata diagonale di RtHa(f)R. Dici-
amo diag(1, . . . , 1,−1, . . . ,−1) la matrice diagonale con le prime k entratediagonali uguali a uno e le restanti uguali a −1.
Per ε1 abbastanza piccolo, consideriamo allora la mappa
ψ1 : Bn(0, ε1)→ Bn(a, δ)
data da ψ1(x) = a + RSx (basta scegliere ε1 tale che ‖x‖ < ε1 implica‖RSx‖ < δ). La mappa f ◦ ψ1 : Bn(0, ε1)→ R soddisfa allora
f ◦ ψ1(x) = f(a) + xtQ1(x)x (x ∈ Bn(0, ε1),
e Q1(0) = diag(1, . . . , 1,−1, . . . ,−1).
29

Lemma 4.3. Per 0 < ε2 < ε1 opportunamente piccolo esiste una mappa C∞
A : Bn(0, ε1)→Mn(R)
soddifacente A(0) = In (la matrice identica), det (A(y)) 6= 0 e
Q1(y) = A(y)tdiag(1, . . . , 1,−1, . . . ,−1)A(y) (9)
per ogni y ∈ Bn(0, ε1).
Si noti che per continuita le matrici Q1(y) per y abbastanza piccolohanno tutte lo stesso indice di positivita, e pertanto sono cogradienti adiag(1, . . . , 1,−1, . . . ,−1). Quindi che per ogni y abbastanza piccolo esistauna matrice invertibile A(y) soddisfacente (??) segue semplicemente da con-siderazioni di algebra lineare. Il vero contenuto del Lemma e che A(y) si puosupporre una funzione C∞ di y.Dim. Sia Sn lo spazio vettoriale delle matrici simmetriche n×n e si consideril’applicazione C∞
γ : Mn(R)→ Sn, A 7→ Atdiag(1, . . . , 1,−1, . . . ,−1)A.
Ragionando come negli esempi ?? e ?? qui sotto si vede facilmente che γ esommersiva in I e quindi per il Corollario ?? esiste un’applicazione C∞
G : V → W
da un intorno aperto V di diag(1, . . . , 1,−1, . . . ,−1) in Sn in un intornoaperto W di In in Mn(R) tale che γ ◦ G = idV . Basta allora prendere
A(y) =: G(Q1(y)
).
Infine, per completare la dimostrazione del lemma di Morse basta com-porre ψ1 con ψ2(y) =: A(y)y.
Esempio 4.8. Consideriamo il luogo Tε ⊆ R4 definito dall’equazione
xy + zt+ z3 − t14 cos(xey) = ε, (10)
per ε 6= 0. La funzione f(x, y, z, t) = xy+zt+z3− t14 cos(xey) ha nell’origineun punto critico non degenere, con matrice Hessiana
H0(f) =
0 1 0 01 0 0 00 0 0 10 0 1 0
.30

La matrice H0(f) ha due autovalori negativi e due positivi. Pertanto esisteun diffeomorfismo ψ : B4(0, δ)→ U con 0 ∈ U ⊆ R4 aperto, tale che ψ(0) = 0e
f ◦ ψ(x, y, z, t) = x2 + y2 − z2 − t2.
Nell’intorno dell’origine, pertanto, il luogo (??) e dato nelle nuove coordinatedalla conica di equazione x2 + y2 − z2 − t2 = ε.
5 Punti di immersivita; immersioni
Definizione 5.1. Siano U ⊆ Rm e V ⊆ Rn aperti, f : U → V una mappaC∞. Diremo che f e immersiva in a ∈ U , o un’immersione locale in a, oanche che a e un punto di immersivita per f se daf : Rm → Rn e iniettivo.Diremo che f e un’immersione se e immersiva in ogni a ∈ U .
Osservazione 5.1. La piu ovvia delle immersioni e l’inclusione
ι : Rm → Rn ∼= Rm × Rn−m, x 7→ (x, 0)
come primo fattore.
Esempio 5.1. Sia f : R→ R2 data da
f(t) =
(tt2
).
Si ha
Jp(t) =
[12t
].
Quindi f e immersiva in ogni t ∈ R, ossia un’immersione (iniettiva).
Esempio 5.2. Sia f : R→ R2 data da
f(t) =
(t2
t3
).
Si ha
Jp(t) =
[2t3t2
].
Quindi f e immersiva in ogni t 6= 0 ∈ R, ma non e immersiva in 0. Quindi fnon e un’immersione, pur essendo iniettiva.
31

Esempio 5.3. Sia f : R2 → R3 data da
f
((xy
))=
x2
xyy2
.
Se p = (x, y)t si ha
Jp(f) =
2x 0y x0 2y
.Quindi f e immersiva in ogni p 6= 0 ∈ R2.
Esempio 5.4. Sia f : R3 → R4 data da
f
xyz
=
x3
x2yyz2
z3
.
Se p = (x, y, z)t si ha
Jp(f) =
3x2 0 02xy x2 00 z2 2yz0 0 3z2
.Quindi f e immersiva in ogni p ∈ R3 con x 6= 0 e z 6= 0, non lo e altrimenti.
Teorema 5.1. Sia U ⊆ Rm un aperto e sia f : U → Rn una mappa C∞. Siau ∈ U un punto di immersivita per f . Allora esistono:
• un aperto U ′ ⊆ U , con u ∈ U ′;
• un aperto V ′ ⊆ Rn con f(U ′) ⊆ V ′;
• un aperto V ′′ ⊆ Rn,
• un diffeomorfismo g : V ′ → V ′′
tali cheg ◦ f |U ′ : U ′ → V ′′ ⊆ Rn
e la mappa
x 7→(x0
)dell’osservazione ??, ristretta a U ′.
32

Prima di passare alla dimostrazione, consideriamo il seguente esempioalgebro-lineare:
Esempio 5.5. Sia F : Rm → Rn lineare e iniettiva (quindi m ≤ n). PoichedxF = F per ogni x ∈ Rm, F e un’immersione. Sia C = {e1, . . . , em} la basecanonica di Rm. Esplicitamente,
e1 =
10...0
, . . . , em =
0...01
.
Poniamo vi =: F (ei), 1 ≤ i ≤ m; essendo F iniettiva, questi m vettori sonolinearmente indipendenti. Pertanto, per il teorema della base incompleta,esistono vm+1, . . . , vn tali che B =: {v1, . . . , vm, . . . , vn} e una base di Rn. SiaG : Rn → Rn l’isomorfismo lineare che a ogni v ∈ Rn associa la colonna dellesue coordinate nella base B:
G(v) =:
a1...an
se v =
∑ni=1 aivi. La composizione G ◦ F : Rm → Rn e data da
G ◦ F
x1
...xm
= G ◦ F
(m∑i=1
xiei
)
= G( m∑i=1
xivi)
=
x1...xm0...0
.
Quindi, componendo a sinistra un’immersione lineare (applicazione lineareiniettiva) per un opportuno diffeomorfismo lineare (applicazione lineare in-vertibile) si ottiene l’immersione dell’osservazione ??.
33

Dimostrazione del Teorema ??. Poniamo b = f(a). Per ipotesi, la matriceJacobiana Ja(f) ha rango massimo m; pertanto possiamo estrarre m righelinearmente indipendenti. Senza perdita di generalita, dopo avere eventual-mente riordinato le coordinate lineari yi su Rn, possiamo supporre che leprime m righe di Ja(f) siano linearmente indipendenti. Quindi, la matricequadrata m×m
A =:
∂1f1(a) · · · ∂mf1(a)∂1f2(a) · · · ∂mf2(a)
.... . .
...∂1fm(a) · · · ∂mfm(a)
(11)
e invertibile. Identifichiamo Rn con Rm×Rn−m e scriviamo il generico y ∈ Rncome
y =
(y′
y′′
),
con y′ ∈ Rm, y′′ ∈ Rn−m. Scriveremo anche
f =
(f ′
f ′′
),
ovef ′ : U → Rm, f ′′ : U → Rn−m.
Esplicitamente, f ′ : U → Rm e data da
f ′(x) =
f1(x)...
fm(x)
(x ∈ U).
Abbiamo f ′(a) = b′ e Ja(f′) = A, e quindi f ′ e un diffeomorfismo locale in a.
Esistono percio aperti U1 ⊆ U , U2 ⊆ Rm tali che a ∈ U1, b′ ∈ U2 e f ′ induce
un diffeomorfismo U1 → U2. Sia g : U2 → U1 il diffeomorfismo inverso. Si ha
g(f ′(x)) = x
per ogni x ∈ U1.Consideriamo ora l’applicazione α : U2 × Rn−m → Rn data da
α(y′, y′′) =
(g(y′)
y′′ − f ′′ ◦ g(y′)
).
Lemma 5.1. α e un diffeomorfismo locale in b.
34

Dim. Segue dall’uguaglianza
Jb(α) =
A−1 | ∗− − − − −−−
0 | In−m
. (12)
Torniamo alla dimostrazione del Teorema ??. Dato il Lemma, sia V ′ unintorno aperto di b sul quale α si restringe a un diffeomorfismo α : V ′ →V ′′ =: α(V ′), e sia U ′ = f−1(V ′). E chiaro dalla definizione di α che lacomposizione α ◦ f : U ′ → V ′′ e la mappa x 7→ (x, 0). Infatti, per x ∈ U ′
abbiamo
α ◦ f(x) = α(f(x))
= α
((f ′(x)f ′′(x)
))=
(g ◦ f ′(x)
f ′′(x)− f ′′(g ◦ f ′(x)
) )=
(x0
)Il Teorema ?? e dimostrato.
Esempio 5.6. Sia f : R → R2 la mappa ϑ 7→ (cos(ϑ), sin(ϑ))t. La ma-trice Jacobiana in ϑ e la derivata prima, cioe (− sin(ϑ), cos(ϑ))t 6= 0, epertanto f e un’immersione (non iniettiva). Fissiamo ϑ0 ∈ R e sia S0 ={(r cos(ϑ0 + π), r sin(ϑ0 + π)) : r ≥ 0}. Consideriamo il diffeomorfismo ψ :(−1,+∞)× (ϑ0− π, ϑ0 + π)→ R2 \ S0 dato da (r, ϑ) 7→ ((r+ 1) cos(ϑ), (r+1) sin(ϑ)). Allora ψ−1 ◦ f(ϑ) = (0, ϑ).
Esempio 5.7. Consideriamo la mappa f : R→ R3 data da f(x) = (x, x2, x3)t.f e un’immersione iniettiva e l’immagine di f e il luogo definito dalla equazioniy − x2 = z − x3 = 0. Consideriamo la mappa ψ : R3 → R3 data da
ψ
xyz
=
xy − x2z − x3
.
E facile verificare che ψ e un diffeomorfismo. Si ha ψ ◦ f(x) = (x, 0, 0)t perogni x ∈ R.
Esempio 5.8. Sia D = {(x, y)t ∈ R2 : x2 +y2 < 1} e consideriamo la mappa
f : D → R3 data da f(x, y) =(x, y,
√1− x2 − y2
)t. Allora f e chiaramente
35

iniettiva ed e un’immersione, in quanto per ogni p = (x, y)t ∈ D la matriceJacobiana
Jp(f) =
1 00 1−x√
1−x2−y2−y√
1−x2−y2
ha rango 2. L’immagine di f e la calotta sferica
S2+ =
x
yz
∈ R3 : x2 + y2 + z2 = 1, z > 0
.
Sia V =
x
yz
∈ R3 : z > 0
e consideriamo la mappa g : V → R3 data
da
g
xyz
=
xy
x2 + y2 + z2 − 1
.
Allora g e chiaramente iniettiva e per ogni p ∈ V la matrice Jacobiana
Jp(g) =
1 0 00 1 0
2x 2y 2z
ha rango 3. Quindi g e un diffeomorfismo locale iniettivo e pertanto undiffeomorfismo g : V → g(V ) (si noti che V ′ =: g(V ) e aperto perche g,essendo un diffeomorfismo locale, e una mappa aperta). In effetti si vede
facilmente che V ′ =
x
yz
∈ R3 : z > x2 + y2 − 1
. Si ha g ◦ f(x, y) =
(x, y, 0)t per ogni (x, y)t ∈ D.
6 Varieta differenziabili.
Definizione 6.1. Una varieta differenziale d-dimensionale (con d ≥ 0intero) e un sottoinsieme ∅ 6= M ⊆ Rk, per qualche intero k ≥ 0, che soddisfala seguente condizione: per ogni m ∈M , esistono:
• un sottoinsieme aperto B di M con m ∈ B;
• un sottoinsieme aperto A ⊆ Rd;
36

• un diffeomorfismo φ : A→ B.
Osservazione 6.1. Equivalentemente, M ⊆ Rk e una varieta differenziale d-dimensionale se esiste un ricoprimento aperto {Bi}i∈I di M (cioe ogni Bi eaperto in M e M =
⋃iBi), tale che per ogni i ∈ I esiste un diffeomorfismo
φi : Ai → Bi, essendo Ai ⊆ Rd un aperto.
Esempio 6.1. Un sottoinsieme aperto M ⊆ Rk e una varieta differenzialedi dimensione k. Basta prendere, per ogni m ∈M , A = M = B, φ = idM .
Esempio 6.2. Se V ⊆ Rk e un sottospazio vettoriale d-dimensionale, unabase di V induce un diffeomorfismo φ : Rd → V (dimostrare!) e quindi V euna varieta differenziabile d-dimensionale in .
Proposizione 6.1. Sia M ⊆ Rk una varieta differenziale d-dimensionale.Allora d ≤ k, e d = k se e solo se M e un sottoinsieme aperto di Rk.
Dim. Sia m ∈ M , e siano A,B, φ come nella definizione ?? (quindim ∈ B). Sia ψ = φ−1 : B → A il diffeomorfismo inverso. Essendo unamappa C∞, ψ si estende a un aperto di Rk. Piu precisamente, esistono unaperto B ⊆ Rk con B ⊆ B e una mappa C∞ nel senso ordinario, ψ : B → Rk,tale che ψ(b) = ψ(b) per ogni b ∈ B (per fissare le idee, possiamo supporre
anche che B = B ∩M). Pertanto, per ogni a ∈ A abbiamo
ψ ◦ φ(a) = ψ(φ(a)
)= ψ
(φ(a)
)= ψ ◦ φ(a)
= a.
Quindi, ψ ◦ φ = idA, e pertanto
da
(ψ ◦ φ
)= idRd : Rd → Rd.
Usando la regola della catena per applicazioni C∞ tra aperti in spazi Euclidei,ricaviamo
idRd = dφ(a)ψ ◦ daφ,
e quindi in particolare deve essere
ker(daφ) = {0}. (13)
37

Siccome daφ ∈ Hom(Rd,Rk), discende che d ≤ k.Supponiamo ora che d = k. Consideriamo un ricoprimento aperto {Bi}i∈I
di M come in Osservazione ??. Vediamo le mappe φi : Ai → Bi ⊆ Rd comeapplicazioni a valori in Rd. Poiche daφi e un’applicazione lineare iniettivaRd → Rd, daφi e un isomorfismo lineare. Pertanto, viste come mappe avalori in Rd, i ϕi sono diffeomorfismi locali, quindi mappe aperte. Ne segueche Bi = ϕi(Ai) e un aperto di Rd, e pertanto M =
⋃iBi e un aperto di Rd.
C.V.D.
Definizione 6.2. Sia M ⊆ Rk una varieta differenziale d-dimensionale.Siano B ⊆ M un aperto di M , A ⊆ Rd un aperto di Rd e φ : A → Bun diffeomorfismo. Diremo allora che:
• φ e una parametrizzazione locale di M ,
• il diffeomorfismo inverso φ−1 : B → A e una carta locale di M
• le funzioni (x1 ◦ φ−1, . . . , xd ◦ φ−1) sono funzioni coordinate per Msu B, essendo qui x1, . . . , xd le coordinate lineari standard su Rd.
Se m ∈ B, 0 ∈ A e φ(0) = a, diremo inoltre che la carta locale φ ecentrata in a, e che le coordinate locali xi ◦ φ−1 sono centrate in a.
Definizione 6.3. Un atlante per la varieta differenziale d-dimensionale Mconsiste di una collezione {(Ai, Bi, φi)}i∈I di carte locali, tale che {Bi}i∈I eun ricoprimento aperto di M (cioe, ogni Bi e un sottoinsieme di M apertoin M , e M =
⋃i∈I Bi:
Esempio 6.3. Consideriamo il cerchio unitario
S1 =
{(xy
)∈ R2 : x2 + y2 = 1
}.
AbbiamoS1 = B1 ∪B2 ∪B3 ∪B4,
ove
B1 =
{(xy
)∈ S1 : y > 0
}, B2 =
{(xy
)∈ S1 : y < 0
},
B3 =
{(xy
)∈ S1 : x > 0
}, B4 =
{(xy
)∈ S1 : x < 0
}.
38

Poniamo A1 = A2 = A3 = A4 = (−1, 1) e definiamo φj : Aj → Bj ponendo
φ1(x) =
(x√
1− x2
), φ1(x) =
(x
−√
1− x2
),
φ3(x) =
( √1− x2
1
), φ1(x) =
(−√
1− x2x
).
Allora i φj sono tutti diffeomorfismi (dimostrare); quindi S1 e una varietadifferenziale 1-dimensionale e {(Aj, Bj, φj)} e un atlante per S1.
Piu in generale, il Corollario ?? puo essere riespresso nel modo seguente:
Corollario 6.1. Se U ⊆ Rm e aperto, f : U → Rn e C∞, b ∈ Rn un valoreregolare con f−1(b) 6= ∅, allora f−1(b) ⊂ Rm e una varieta differenziabile(m− n)-dimensionale.
Esempio 6.4. Sia F : Rn+1 → R data da
F
x1
...xn+1
=
n∑i=1
x2i .
La matrice Jacobiana e
Jp = 2 · [x1 · · · xn] (p =
x1...xn
).
Pertanto 0 ∈ R e il solo valore singolare di F . In particolare, 1 ∈ R e unvalore regolare di F e quindi la sfera unitaria Sn = F−1(1) e una varietadifferenziale n-dimensionale.
Esempio 6.5. Sia G : R3 → R2 l’applicazione
G
xyz
=
(x2 + y2 + z2
z2 − x2 − y2).
La matrice Jacobiana di Gin p = (x y z)t e
Jp(G) = 2
[x y z−x −y z
].
39

Tale matrice ha rango < 2 se e solo se
xz = yz = 0.
Quindi Jp(G) ha rango < 2 se e solo se z = 0 o x = y = 0 (cioe sull’asse z, Az,e sul piano xy, Pxy. Quindi il luogo dei valori singolari di G e G(Az)∪G(Pxy).Si ha
G(Az) =
{r ·(
11
): r ≥ 0
},
G(Pxy) =
{r ·(
1−1
): r ≥ 0
}.
In particolare,(
1 0)t ∈ R2 e un valore regolare di G, e G−1
( (1 0
)t )e una varieta differenziale di dimensione 2 − 1 = 1. Esplicitamente, si vedefacilmente che
G−1((
10
))=
x
y± 1√
2
: x2 + y2 =1√2
=
1√2
cos(t)1√2
sin(t)
± 1√2
: t ∈ [0, 2π)
e diffeomorfo a due copie disgiunte di S1.
Esempio 6.6. Siano M ⊆ Rk e N ⊆ Rl sottovarieta di dimensione m e n,rispettivamente. Il prodotto M × N ⊆ Rk × Rl ∼= Rk+l e allora una varietadifferenziabile di dimensione m + n. Infatti, sia (p, q) ∈ M × N e sianoU ⊆ M e V ⊆ N intorni aperti di p e q rispettivamente, tali che esistonodiffeomorfismi φ : A → U e ψ : V → V , essendo A ⊆ Rm e B ⊆ Rn aperti.Allora l’applicazione prodotto φ× ψ : A× B → U × V e un diffeomorfismotra l’aperto A×B ⊆ Rm+n e l’intorno aperto U × V ⊆M ×N di (p, q).
Esempio 6.7. Siano M ⊆ Rk una varieta differenziabile m-dimensionale, eS ⊆ Rl un sottoinsieme. Supponiamo che esista un diffeomorfismo f : M →S. Allora anche S e una varieta differenziabile m-dimensionale. Infatti, sias ∈ S arbitrario. Sia U ⊆ M un intorno aperto di f(s) tale che esiste unacarta φ : A → U , con A ⊆ Rm aperto. Allora U ′ = f(U) ⊆ S e un intornoaperto di s, e f ◦ φ : A→ U ′ e un diffeomorfismo.
Esempio 6.8. Siano M ⊆ Rk e N ⊆ Rl varieta differenziabili di dimensionim e n, rispettivamente. Sia f : M → N una mappa C∞ (nel senso dellaDefinizione ??). Consideriamo il grafo
grafo(f) = {(x, f(x)) : x ∈M} ⊆ Rk+l.
40

Allora grafo(f) e una varieta differenziabile m-dimensionale, diffeomorfa aM . Infatti, in virtu dell’Esempio ??, basta notare che le applicazioni π :grafo(f) → M , (p, f(p)) 7→ p e ψ : M → grafo(f), p 7→ (p, f(p)) sono C∞ el’una l’inversa dell’altra.
Osservazione 6.2. Sia M ⊆ Rk una varieta differenziabile m-dimensionale, esia U ⊆M un aperto (quindi U = U∩M , per un certo aperto U di Rk). AlloraU e anch’esso una varieta differenziabile m-dimensionale. Infatti, sia x ∈ U .Esistono per ipotesi un aperto V di M con x ∈ V e un diffeomorfismo (cartalocale) φ : A→ V , essendo A ⊆ Rm un aperto. Poiche l’intersezione di apertie un aperto, V ′ = V ∩U e un sottoinsieme aperto di U ; poiche un’applicazioneC∞ e continua, l’immagine inversa A′ = φ−1(V ′) e un sottoinsieme aperto diA (e quindi di Rk). Inoltre e immediato rendersi conto che l’applicazioneindotta per restrizione, φ′ : A′ → V ′, e anch’essa un diffeomorfismo.
Proposizione 6.2. Sia M ⊆ Rk e supponiamo che esista un ricoprimentoaperto M =
⋃i∈IMi (quindi, ogni Mi e aperto in M), tale che ogni Mi e una
varieta differenziale d-dimensionale. Allora M e una varieta differenzialed-dimensionale.
Dim. Sia m ∈ M . Esiste i ∈ I tale che m ∈ Mi. Poiche Mi e unavarieta differenziale d-dimensionale, esiste una carta locale (A,B, φ) per Mi
nell’intorno di m, cioe esistono:
• B ⊆Mi aperto in Mi con m ∈ B,
• A ⊆ Rd aperto,
• un diffeomorfismo φ : A→ B.
Ma, essendo Mi aperto in M , un aperto in Mi e anche aperto in M . Pertanto,(A,B, φ) e anche una carta locale per M nell’intorno di m. Poiche esiste unacarta locale per M nell’intorno di ogni m ∈M , M e una varieta differenzialed-dimensionale.
C.V.D.
Proposizione 6.3. Sia M ⊆ Rk una varieta differenziale d-dimensionale.Sia m ∈M . Allora esistono:
• un aperto U ⊆ Rk con m ∈ U ,
• un aperto V ⊆ Rk con 0 ∈ V ,
• un diffeomorfismo α : V → U
41

tali che α(0) = m e α−1(M) = V ∩(Rd × {0}
), ove Rd × {0} ⊆ Rk denota
il sottospazio vettoriale definito dall’annullarsi delle ultime k− d coordinate.
Passando al diffeomorfismo inverso ψ = α−1, possiamo riesprimere laProposizione ?? come segue:
Proposizione 6.4. Sia M ⊆ Rk una varieta differenziale d-dimensionale.Sia m ∈M . Allora esistono:
• un aperto U ⊆ Rk con m ∈ U ,
• un aperto V ⊆ Rk con 0 ∈ V ,
• un diffeomorfismo ψ : U → V
tali che ψ(m) = 0 e M ∩ U = ψ−1(Rd × {0})
, ove Rd × {0} ⊆ Rk denota il
sottospazio vettoriale definito dall’annullarsi delle ultime k − d coordinate.
Dim. Sia ϕ : A → B una carta locale per M con m ∈ M . In virtu di(??), in quanto mappa a valori in Rk ϕ e un’immersione. Per il Teoremadell’immersione locale, possiamo trovare aperti U, V ⊆ Rk con m ∈ U e un
diffeomorfismo ψ : U → V tale che ψ◦ϕ(
(x1, . . . , xd)t)
= (x1, . . . , xd, 0 . . . , 0)t.
Dopo aver preso opportune restrizioni, possiamo anche supporre senza perditadi generalita che M∩U = ϕ(A) (lasciamo i dettagli al lettore). La condizioneche ψ(m) = 0 si ottiene componendo con una traslazione (ovviamente un dif-feomorfismo Rk → Rk).
Esempio 6.9. Sia M = S1 ⊆ R2, e si consideri eiϑ0 ∈ S1. Consideriamo lamappa ψ : V =: (−1,+∞)× (−π, π) ⊆ R× R ∼= R2 → R2 data da
ψ(r, ϑ) =
((r + 1) cos(ϑ+ ϑ0)(r + 1) sin(ϑ+ ϑ0)
).
E immediato vedere che ψ e iniettiva, e che la matrice Jacobiana di ψ in(r, ϑ) e [
cos(ϑ+ ϑ0) −(r + 1) sin(ϑ+ ϑ0)sin(ϑ+ ϑ0) (r + 1) cos(ϑ+ ϑ0)
],
ovunque invertibile su V (il determinante e (r + 1)2 > 0). Pertanto, ψ eun diffeorfismo locale iniettivo, e quindi un diffeomorfismo tra V e U =:ψ(V ) 3 eiϑ0 . Chiaramente, essendo ψ una mappa aperta, U e aperto. Infine,
ψ−1(S1) = V ∩({0} × R
).
42

Non ogni varieta differenziale M ⊆ Rk e descrivibile come l’immagineinversa di un valore regolare di una mappa C∞ a valori in uno spazio Eu-clideo - cio implica in effetti delle conseguenze piuttosto forti sulla strutturaglobale di M . Tuttavia, i risultati precedenti mostrano che cio e sempre verolocalmente. Piu precisamente,
Proposizione 6.5. Sia M ⊆ Rk una varieta differenziale d-dimensionale.Allora per ogni m ∈M esistono:
• un aperto U ⊆ Rk con m ∈ U ,
• una funzione C∞, f : U → Rk−d,
• un valore regolare b ∈ Rk−d di f ,
tali che M ∩ U = f−1(b).
Dim. Sia ψ : U → V come nell’asserto della Proposizione ??. Siaπ : Rk → Rk−d la proiezione sulle ultime k − d coordinate. Essendo lacomposizione di una sommersione e di un diffeomorfismo, π ◦ ψ : U → Rk−de una sommersione, e quindi ogni x ∈ Rk−d e un valore regolare di π ◦ ψ. In
particolare, tale e 0, ed e chiaro che per costruzione M ∩ U =(π ◦ ψ
)−1(0).
C.V.D.
Corollario 6.2. Sia M ⊆ Rk una varieta differenziale d-dimensionale. Al-lora esistono
• aperti Ui ⊆ Rk, i ∈ I, con M ⊆⋃i∈I Ui,
• sommersioni C∞, fi : Ui → Rk−d,
tali che per ogni i ∈ I si ha
M ∩ Ui = f−1i (0).
7 Connessione di varieta differenziali.
Come e noto dal I anno, la nozione di connessione per archi e piu forte diquella di connessione, nel senso che ogni spazio connesso per archi e connesso,mentre non ogni spazio connesso e connesso per archi. Ad esempio,
Z =: {(0, 0)} ∪{(
t, sin
(1
t
)): t > 0
},
43

con la topologia indotta da quella Euclidea di R2, e connesso ma non connessoper archi.
Ricordiamo brevemente l’implicazione connesso per archi ⇒ connesso.Supponiamo per assurdo che lo spazio topologico X sia connesso per archima non connesso. Siano allora A,B ⊆ X aperti non vuoti e disgiunti tali cheX = A ∪ B; scegliamo a ∈ A, b ∈ B e un cammino continuo γ : [0, 1] → Xtale che γ(0) = a, γ(1) = b. Allora γ−1(A) 3 0, γ−1(B) 3 1 sono aperti nonvuoti e disgiunti di [0, 1] tali che [0, 1] = γ−1(A)∪ γ−1(B), contro il fatto che[0, 1] e connesso.
La situazione e molto piu semplice nel contesto delle varieta differen-ziali, dove le due nozioni sono equivalenti. Prima di vederlo, premettiamo ilseguente:
Lemma 7.1. Sia M una varieta differenziale d-dimensionale e sia m ∈M .Allora esiste una carta locale della forma
ϕ : Bd(0; 1)→M
tale che ϕ(0) = m.
Ricordiamo che per ogni d ≥ 1, x ∈ Rd, λ > 0 si pone
Bd(x;λ) =:{y ∈ Rd : ‖y − x‖ < λ
}.
Dim. Cominciamo con lo scegliere una qualsiasi carta locale φ1 : A1 → U1
per M con m ∈ U1.Dato che φ1 e un diffeomorfismo, a = φ−1(m) ∈ A1 e univocamente
determinato.Dato che A1 ⊆ Rd e aperto, esiste ε > 0 tale che Bd(a, ε) ⊆ A1. Poniamo
A2 =: Bd(a, ε).
Quindi, dal momento che φ1 e un diffeomorfismo,
φ1(A2) = φ1
(Bd(a, ε)
)⊆ U1
e aperto; poniamoU2 =: φ1(A2).
Inoltre, sempre perche ϕ e un diffeomorfismo, la restrizione
φ2 =: φ1|Bd(a,ε): A2 → U2
44

e ancora un diffeomorfismo, quindi una carta locale per M che soddisfaφ(a) = m.
Fin qui abbiamo semplicemente ristretto il dominio della carta cosı dasupporre che sia definita su una palla aperta. Comporremo ora la carta conuna traslazione, cosı da supporre che il centro della palla sia l’origine 0 ∈ Rd.
Sia Ta : Rd → Rd la traslazione per a, ovvero Ta(x) = x+a (x ∈ Rd). Dalmomento che Ta e chiaramente un diffeomorfismo, con inversa T−a = −Ta,la composizione
φ3 = φ2 ◦ Ta : Bd(0, ε)→ U2
e ancora un diffeomorfismo, ovvero una carta locale per M , soddisfacenteφ3(0) = m.
Usiamo ora il fatto che la dilatazione Dε : Rd → Rd, data da Dε(x) =: εx,e anch’essa un diffeomorfismo, quindi definisce per restrizione un diffeomor-fismo Bd(0, 1)→ Bd(0, ε). La composizione
ϕ4 = ϕ3 ◦Dε : Bd(0, 1)→ A2
soddisfa ϕ4(0) = m ed e una carta locale che soddisfa le conclusioni delLemma.
C.V.D.
Possiamo ora dimostrare il seguente:
Teorema 7.1. Sia M una varieta differenziale. Allora M e connessa se esolo se e connessa per archi.
Dim. Dobbiamo soltanto dimostrare l’implicazione solo se. Premettiamola seguente definizione:
Definizione 7.1. Sia M una varieta differenziale e per ogni m ∈ M defini-amo Mm ⊆ M come il luogo di tutti gli m′ ∈ M tali che esiste un camminocontinuo γ : [0, 1]→M tale che γ(0) = m e γ(1) = m′.
Chiaramente, dimostrare cheM e connessa per archi equivale a dimostrareche Mm = M , per un elemento (e quindi per ogni elemento) di M .
Lemma 7.2. Sia M una varieta differenziale e sia m0 ∈ M . Allora Mm0 eaperto e non vuoto.
Dim. Chiaramente, m0 ∈Mm0 (si consideri il cammino costante), quindiMm0 6= ∅. Per dimostrare che Mm0 e aperto, si supponga m ∈Mm0 e usandoil Lemma ?? si scelga una carta locale ϕ : Bd(0, 1)→ U per M con ϕ(0) = m.
45

Per definizione di Mm0 , esiste un cammino continuo γ : [0, 1] → M taleche γ(0) = m0 e γ(1) = m.
Se poi m′ ∈ U , possiamo scrivere m′ = ϕ(x) per un unico x ∈ Bd(0, 1).Quindi l’applicazione η : [0, 1]→M data da
η(t) =: ϕ(tx)
e continua e soddisfa η(0) = m, η(1) = m′.Possiamo quindi considerare la funzione γ ∗ η : [0, 1]→M data da
γ ∗ η(t) =:
{γ(2t) 0 ≤ t ≤ 1
2
η(2t− 1) 12≤ t ≤ 1.
Allora γ ∗ η e continua, per il lemma di incollamento di funzioni continue, einoltre soddisfa per costruzione γ ∗ η(0) = m0, γ ∗ η(1) = m′.
Quindi concludiamo che m′ ∈Mm0 per ogni m′ ∈ U , ovvero che U ⊆Mm0 .Pertanto, Mm0 contiene un intorno aperto di ogni suo punto, ovvero e aperto.
C.V.D.
Lemma 7.3. Sia M una varieta differenziale e sia m0 ∈ M . Allora Mm0 echiuso in M .
Dim. Dobbiamo dimostrare che se mi ∈Mm0 , i = 1, 2, . . ., e mi → m∞ ∈M per i→ +∞, allora m∞ ∈Mm0 .
Per definizione di Mm0 , per ogni i ∈ N esiste un cammino continuo γi :[0, 1]→M tale che γi(0) = m0 e γi(1) = mi.
Dato il Lemma ??, esiste una carta locale ϕ : Bd(0, 1) → U per M conϕ(0) = m∞. Dato che mi → m∞, abbiamo mi ∈ U per i � 0; quindi, perogni i� 0 possiamo scrivere mi = ϕ(xi) con xi ∈ Bd(0, 1).
Consideriamo allora il cammino ηi : [0, 1]→M dato da
ηi(t) =: ϕ(
(1− t)xi)
;
allora ηi e continua e soddisfa
ηi(0) = ϕ(xi) = mi, ηi(1) = ϕ(0) = m∞.
Quindi se i � 0 il cammino γi ∗ ηi : [0, 1] → M e ben definito, continuo esoddisfa
γi ∗ ηi(0) = m0, γi ∗ ηi(1) = m∞.
Ne segue che m∞ ∈Mm0 .C.V.D.
46

La dimostrazione del Teorema ?? e ora immediata: per ogni m0 ∈ M ilsottoinsieme Mm0 ⊆M e non vuoto, aperto e chiuso in M . Se M e connessa(e non vuota), dato m0 ∈ M deve essere Mm0 = M , ovvero M e connessaper archi.
C.V.D.
8 Vettori e spazi tangenti
8.1 Lo spazio tangente a una varieta differenziale
Sia M ⊆ Rk una varieta differenziabile d-dimensionale. Vogliamo definire lospazio dei vettori tangenti ad M in un punto dato m ∈M .
Lemma 8.1. Sia v ∈ Rk. Le seguenti condizioni sono equivalenti:
1. esiste un’applicazione C∞, γ : (−ε, ε)→M , per qualche ε > 0, tale cheγ(0) = m e γ′(0) = v;
2. per ogni carta locale ϕ : A→ B per M con m ∈ B, se a ∈ A e l’unicopunto di A con φ(a) = m allora v ∈ daϕ(Rd).
3. esiste una carta locale ϕ : A→ B per M con m ∈ B, tale che se a ∈ Ae l’unico punto di A con φ(a) = m allora v ∈ daϕ(Rd);
Dim. 1. implica 2.: Dato 1., sia ϕ : A → B una carta locale per Mcon m ∈ B, e sia a ∈ A l’unico punto di A con φ(a) = m. Possiamosupporre, eventualmente dopo avere sostituito ε con 0 < ε′ < ε opportuno,
che γ(
(−ε, ε))⊆ B. E cosı definita la composizione γ =: ϕ−1 ◦ γ : (−ε, ε)→
A. Allora γ(0) = ϕ−1(m) = a. Inoltre,
daϕ(v) = daϕ(γ′(0)
)= daϕ ◦ d0γ(1)
= d0(ϕ ◦ γ
)(1)
= d0γ(1)
= γ′(0)
= v.
Quindi, v ∈ daϕ(Rd).
2. implica 3.: ovvio.
47

3. implica 1.: Sia v = daϕ(v). Consideriamo γ : (−ε, ε) → M data daγ(t) = ϕ(a+ tv); γ e definita se ε > 0 e sufficientemente piccolo. Allora
γ′(0) = d0γ(1)
= d0ϕ(v)
= v.
C.V.D.
Definizione 8.1. Sia M ⊆ Rk una varieta differenziale d-dimensionale. Siam ∈ M . Lo spazio tangente a M in m, TmM , e la collezione di tuttii vettori velocita γ′(0), al variare di γ tra le curve C∞, γ : (−ε, ε) → Rksoddisfacenti:
• γ(t) ∈M per ogni t ∈ (−ε, ε);
• γ(0) = m.
Come immediata conseguenza del Lemma ?? e della Definizione ?? otte-niamo:
Corollario 8.1. Sia M ⊆ Rk una varieta differenziale d-dimensionale. Siam ∈ M . Sia φ : A → B una carta locale per M con m ∈ B (quindi A eun aperto di Rd, B e un aperto di M e φ e un diffeomorfismo). Sia a ∈ Al’unico punto tale che m = φ(a). Allora
TmM = daφ(Rd).
Di qui ricaviamo subito:
Corollario 8.2. Sia M ⊆ Rk una varieta differenziale d-dimensionale. Perogni m ∈ M , lo spazio tangente TmM e un sottospazio vettoriale di Rk,avente dimensione d.
Dim. Sia m ∈ M e sia φ : A → B una carta locale per M con m ∈M . Sia a ∈ A l’unico punto tale che φ(a) = m. Quindi TmM = daφ
(Rd)
per il Corollario ??. D’altra parte, abbiamo visto che ogni carta locale φ,quando vista come applicazione a valori in Rk, e un’immersione. Quindidaφ : Rd → Rk e un’applicazione lineare iniettiva. Pertanto, la sua immaginee un sottospazio vettoriale d-dimensionale di Rk.
Esempio 8.1. Sia U ⊆ Rk un aperto. Allora U e una varieta differenziale k-dimensionale. Usando la carta idU : U → U e l’identita duidU = idRk (u ∈ U)il Corollario ?? fornisce un isomorfismo naturale Rk ∼= TuU . Esplicitamente,possiamo vedere v ∈ Rk come il vettore velocita γ′(0), essendo γ(t) = u+ tv(t ∈ (−ε, ε) opportuno).
48

Esempio 8.2. Sia S1 ⊂ R2 il cerchio unitario. Consideriamo la carta
φ : (−1, 1)→ U, x 7→ (x,√
1− x2)t,
essendo U = S1 ∩ {y > 0}. Se a = (x, y) = (x,√
1− x2) ∈ U , abbiamoTa(S
1) = dxφ(R). D’altra parte, la matrice Jacobiana di φ e
Jx(φ) =
[1
− x√1−x2
].
Quindi
Ta(S1) = span
{(1
− x√1−x2
)}= span
{( √1− x2−x
)}= span{a}⊥.
Usando invece la parametrizzazione ψ : (0, π)→ U data da
ψ(ϑ) = (cos(ϑ), sin(ϑ))t,
otterremmo, posto a = (cos(ϑ), sin(ϑ)),
Ta(S1) = dϑψ(R)
= span
{(− sin(ϑ)cos(ϑ)
)}= span{a}⊥.
Esercizio 8.1. Verificare che Ta(S1) = span{a}⊥ per ogni a ∈ S1.
Esempio 8.3. Sia S2 ⊆ R3 la sfera unitaria centrata nell’origine. Sia U =S2 ∩ {z > 0} e consideriamo la parametrizzazione gia vista
φ : D → U, (x, y)t 7→ (x, y,√
1− x2 − y2)t,
essendo D = {(x, y)t : x2 + y2 < 1}. Allora se
a ∈ U , a = (x, y,√
1− x2 − y2)t = φ(x, y),
otteniamo
J(x,y)(φ) =
1 00 1
− x√1−x2−y2
− y√1−x2−y2
49

da cui
Ta(S2) = d(x,y)φ(R2)
= span
√
1− x2 − y20−x
,
0√1− x2 − y2−y
= span{a}⊥.
Esercizio 8.2. Verificare che Ta(S2) = span{a}⊥ per ogni a ∈ S2.
Esempio 8.4. Siano M ⊆ Rk e N ⊆ Rl varieta differenziabili. Siano p ∈Me q ∈ N . Allora c’e un isomorfismo intrinseco
T(p,q)(M ×N) ∼= Tp(M)× Tq(N).
Per esempio, sia v ∈ T(p,q)(M × N) ⊆ Rk × Rl. Scriviamo v = (v1, v2), conv1 ∈ Rk e v2 ∈ Rl. Sia γ : (−ε, ε) → M × N una curva con γ(0) = (p, q)e γ′(0) = v. Allora γ = (γ1, γ2), ove γ1 : (−ε, ε) → M e γ2 : (−ε, ε) → Nsoddisfano γ1(0) = p, γ(0) = q, γ′1(0) = v1, γ
′2(0) = v2. Abbiamo quindi una
mappa ben definita e intrinseca T(p,q)(M ×N)→ Tp(M)× Tq(N) ed e facilevedere che tale mappa e un isomorfismo.
8.2 Lo spazio tangente di un’immagine inversa
Proposizione 8.1. Siano U ⊆ Rm, V ⊆ Rn aperti, e sia f : U → Vuna mappa C∞. Sia b ∈ V un valore regolare di f tale che f−1(b) 6= ∅ (inparticolare, quindi, m ≥ n e Mb = f−1(b) ⊆ U e una varieta differenziabiledi dimensione m− n). Allora per ogni a ∈Mb si ha
Ta(Mb) = ker(daf).
Dim. Ta(Mb) e ker(daf) sono sottospazi vettoriali m− n dimensionali di Rm(daf e suriettivo per l’ipotesi che b sia un valore regolare di f). Pertanto bastadimostrare che Ta(Mb) ⊆ ker(daf). Sia v ∈ Ta(Mb) e sia γ : (−ε, ε)→Mb unacurva C∞ tale che γ(0) = a e γ′(0) = v. Allora, posto γ = f ◦ γ : (ε, ε)→ V ,si ha daf(v) = γ′(0) (osservazione ??). D’altra parte γ(t) = f (γ(t)) = b perogni t ∈ (−ε, ε), dato che γ(t) ∈Mb = f−1(b) per ogni t. Quindi γ e costantee pertanto γ′(t) = 0 per ogni t. Quindi daf(v) = 0, ovvero v ∈ ker(daf).
50

Esempio 8.5. Rivisitiamo gli esempi del cerchio e della sfera unitari allaluce della Proposizione. In generale, per ogni intero n ≥ 0 e reale r > 0 sia
Snr =
{(x1, . . . , xn+1)
t ∈ Rn+1 :n+1∑i=1
x2i = r2
}.
Se f : Rn+1 → R e la funzione
f
x1
...xn+1
=
∑i
x2i ,
e chiaro che la matrice Jacobiana di f in a = (a1, . . . , an+1)t e
Ja(f) =[
2a1 · · · 2an+1
].
Quindi 0 ∈ R e l’unico valore singolare di f e percio Snr = f−1(r2) ⊆ Rn+1 euna varieta differenziabile di dimensione n. Se a ∈ Snr , otteniamo
Ta(Snr ) = ker(daf)
=
{(x1, . . . , xn+1)
t : 2∑i
aixi = 0
}= span{a}⊥.
8.3 Un esempio importante: il gruppo ortogonale
Sia Mn(R) lo spazio vettoriale delle matrici quadrate di ordine n, Sn(R) ⊆Mn(R) il sottospazio delle matrici simmetriche. Mn(R) e Sn(R) hanno di-mensione, rispettivamente, n2 e n(n+ 1)/2. Consideriamo l’applicazione
F : Mn(R) −→ Sn(R), A 7→ AAt.
F e chiaramente C∞ (ogni entrata di AAt e un polinomio quadratico nelleentrate di A) e per A ∈ Mn(R) il differenziale dAF ∈ Hom(Mn(R), Sn(R)) edato da
dAF (B) = limx→0
F (A+ xB)− F (A)
x= BAt +
(BAt
)t.
Se A e invertibile e C ∈ Sn(R), abbiamo dAF (B) = C per B = 12C(At)−1.
Quindi F e sommersiva in ogni A ∈ Mn(R) invertibile. D’altra parte, seB ∈ Sn(R) e invertibile, tale e ogni A ∈ F−1(B), poiche F (A) = B implica
51

det(B) = det(A)2. Quindi se B e invertibile F e sommersiva in ogni A ∈F−1(B) e pertanto B e un valore regolare. In particolare, In e un valoreregolare di F e di conseguenza
F−1(In) = {A : AAt = In}
e una varieta differenziabile di dimensione n2 − n(n + 1)/2 = n(n − 1)/2.Chiaramente, F−1(In) non e altro che il gruppo ortogonale O(n). Il suospazio tangente in A ∈ O(n) e
TA (O(n)) = ker dAF = {B ∈Mn(R) : ABt +BAt = 0}.
Se A = In otteniamo
TIn (O(n)) = {B : B +Bt = 0},
ovvero lo spazio delle matrici antisimmetriche.
Esercizio 8.3. Dimostrare che per ogni A ∈ O(n) si ha
TA (O(n)) = A · TI (O(n)) = TI (O(n)) · A.
Qui A · TI (O(n)) = {A ·B : B ∈ TI (O(n))}, etc.
8.4 Un esempio importante: il gruppo unitario.
Siano Mn(C) lo spazio delle matrici complesse n × n e Hn ⊂ Mn(C) il sot-tospazio vettoriale reale delle matrici Hermitiane:
Hn ={A ∈Mn(C) : A = A
t}.
Come spazi vettoriali reali, Mn(C) e Hn hanno dimensioni, rispettivamente,2n2 e n2. Consideriamo l’applicazione F : Mn(C) → Hn data da F (A) =
AAt. Allora F−1(I) e il gruppo delle matrici unitarie:
F−1(I) = U(n) ={A ∈Mn(C) : AA
t= I}.
Ragionando come sopra, si vede facilmente che
dAF (B) = BAt
+ ABt
(A,B ∈Mn(C)),
e quindi che F e sommersiva in ogniA invertibile. Pertanto, poiche det(AAt) =
|det(A)|2, ogni B ∈ Hn invertibile e un valore regolare di F . Cio e vero in
52

particolare per I, e quindi U(n) ⊆ Mn(C) e una varieta differenziabile didimensione 2n2−n2 = n2. Lo spazio tangente a U(n) in A ∈ U(n) e dato da
TA (U(n)) = ker dAF ={B ∈Mn(C) : BA
t+ AB
t= 0}.
In particolare,
TI (U(n)) = ker dIF ={B ∈Mn(C) : B +B
t= 0},
lo spazio i ·Hn delle matrici antihermitiane.
Osservazione 8.1. E chiaro dalla discussione precedente che se M ⊆ Rk euna varieta differenziabile e U ⊆M e un aperto, allora TxU = TxM per ognix ∈ U (si ricordi l’Osservazione ??).
8.5 Appendice: La compattezza di O(n) e U(n)
Consideriamo i seguenti spazi:
• GLn(R), il gruppo lineare generale di tutte le matrici reali n × n in-vertibili;
• O(n) ⊆ GLn(R);
• GLn(C), il gruppo lineare generale di tutte le matrici reali n × n in-vertibili;
• U(n) ⊆ GLn(C).
Ci chiediamo quali di questi sono spazi compatti.Innanzitutto osserviamo cheO(n) ⊆ GLn(R) ⊆Mn(R), e che quest’ultimo
e uno spazio vettoriale reale di dimensione n2, e quindi astrattamente iso-morfo a Rn2
. Dato che λ · In ∈ GLn(R) per ogni λ ∈ R, λ 6= 0, chiaramenteGLn(R) ⊆Mn(R) non e chiuso ne limitato; pertanto non e compatto (bastaanche osservare che GLn(R) ⊆ Mn(R) e un sottoinsieme aperto). Lo stessovale per GLn(C) ⊆Mn(C).
Veiamo a O(n). Chiaramente, O(n) - in quanto come visto immagineinversa di In per un’applicazione C∞ - e un sottoinsieme chiuso di Mn(R).Quindi il punto e stabilire se e compatto. Questo si puo fare in una qualsiasinorma su Mn(R); ne sceglieremo ora una conveniente. Scegliamo come basedi Mn(R) la base canonica
C = {E11, E12, . . . , En(n−1), Enn},
53

essendo Eij ∈ Mn(R) la matrice avente entrate tutte nulle eccetto la (i, j)-ima, che e uguale a uno: (
Eij)lk
= δil · δjk.
Quindi, se A = [Aij] allora
A =n∑
i,j=1
AijEij.
Sia ϕ : Mn(R)→ Rn2l’isomorfismo di spazi vettoriali indotto dalla base C.
Consideriamo ora il prodotto scalare
〈A,B〉 =: Tr(AtB
)(A,B ∈Mn(R)).
Abbiamo
〈A,B〉 = Tr(AtB
)=
∑k
(AtB
)kk
=∑k
∑j
(At)kiBik
=∑k
∑j
AikBik
= (ϕ(A), ϕ(B))stand ,
ove ( , )stand denota il prodotto scalare standard su Rn2. Quindi, ϕ e un
isomorfismo unitario(Mn(R), 〈 , 〉
)→(Rn2
, ( , )stand
); detto equivalente-
mente, la base C e ortonormale per(Mn(R), 〈 , 〉
).
Possiamo quindi identificare isometricamente O(n) ⊆ Mn(R) con la suaimmagine in Rn2
. Ma se A ∈ O(n), abbiamo
〈A,A〉 = Tr(AtA
)= Tr
(In)
= n,
e quindi ϕ(A) giace sulla sfera di centro l’origine e centro√n. Quindi O(n)
e limitato, e pertanto compatto.
Esercizio 8.4. Ripetere l’analisi precedente per U(n), con le opportune mod-ifiche.
54

9 Fibrato tangente
Definizione 9.1. Sia M ⊆ Rk una varieta differenziabile. Il fibrato tangenteTM (o T (M)) di M e l’unione disgiunta di tutti i suoi spazi tangenti, vistacome sottoinsieme di Rk × Rk ∼= R2k:
TM = {(p, v) : p ∈M, v ∈ Tp(M)} ⊆ Rk × Rk.
Esempio 9.1. Lo spazio tangente alla sfera unitaria Sn ⊆ Rn+1 in x ∈ Sn eil complemento ortogonale di x. Pertanto,
T (Sn) =
{(xy
): x ∈ Sn, (x, y) = 0
}∼=
{(xy
)∈ Rn+1 × Rn+1 :
∑i
x2i = 1,∑i
xiyi = 0
}.
Se identifichiamo Rn+1 × Rn+1 con R2n+2 nel modo ovvio e definiamo F :R2n+2 → R2 mediante
F (x, y) =
( ∑i x
2i∑
i xiyi
),
abbiamo T (Sn) = F−1((
10
)). La matrice Jacobiana in a = (x, y)t e la
Ja(F ) =
[2x1 · · · 2xn+1 0 · · · 0y1 · · · yn+1 x1 · · · xn+1
].
E chiaro allora che(
1 0)t
e un valore regolare per F , e quindi che T (Sn)e una varieta differenziabile di dimensione 2n+ 2− 2 = 2n.
Esempio 9.2. Piu in generale, siano U ⊆ Rk, V ⊆ Rl aperti e sia f : U → Vuna mappa C∞. Sia b ∈ U un valore regolare con f−1(b) 6= ∅. QuindiMb = f−1(b) e una varieta differenziabile di dimensione k − l. Si ha
T (Mb) ={
(x, y) ∈ U × Rk : f(x) = b, dxf(b) = 0}.
Consideriamo l’applicazione
F : U × Rk ⊆ Rk × Rk ∼= R2k → Rl × Rl ∼= R2l
data da
F (x, y) =
(f(x)dxf(y)
)=
(f(x)∑i yifi(x)
)(x ∈ U, y ∈ Rk),
55

ove fi = ∂f∂xi
e la i-ma derivata parziale di f . Chiaramente,
T (Mb) = F−1((
b0
)).
La matrice Jacobiana di F in (x, y) e chiaramente:
J(x,y)(F ) =
Jx(f) | 0−− −−∗ | Jx(f)
,ovviamente di rango massimo 2l se x ∈ Mb. Ne segue che
(b0
)e un
valore regolare di F , e quindi T (Mb) ⊆ R2k e una varieta differenziabile didimensione 2k − 2l = 2(k − l) = 2 dim(Mb).
Esempio 9.3. Come casi particolari dell’esempio precedente, abbiamo anchei fibrati tangenti del gruppo ortogonale
T(O(n)
)={
(A,B) : AAt = In, ABt +BAt = 0
}e del gruppo unitario
T(U(n)
)={
(A,B) : AAt
= In, ABt+BA
t= 0}.
In realta abbiamo visto che TA (O(n)) = A · TI (O(n)), e quindi
T(O(n)
)={
(A,A ·B) : B +Bt = 0},
e questo spazio e chiaramente diffeomorfo a O(n) × An, ove An ⊂ Mn(R) elo spazio delle matrici antisimmetriche.
Esercizio 9.1. Ripetere tali considerazioni per U(n).
Osservazione 9.1. Sia π : TM → M la mappa (x, v) 7→ x. Siccome π eindotta per restrizione dalla proiezione sul primo fattore R2k ∼= Rk×Rk → Rk,e ovviamente una mappa C∞. Essendo C∞ essa e continua, e quindi, datal’Osservazione ??,
π−1(U) = {(x, v) : x ∈ U, v ∈ Tx(U)} ∼= T (U)
e aperto in TM per ogni aperto U ⊆M .
Teorema 9.1. Sia M ⊆ Rk una varieta differenziabile m-dimensionale. Al-lora TM ⊆ R2k e una varieta differenziabile 2m-dimensionale.
56

Dim. Sia (x, v) ∈ TM , ovvero x ∈ M e v ∈ TxM . Vogliamo dimostrare cheesiste un intorno aperto U ′ di (x, v) in TM diffeomorfo a un aperto di R2m.Per ipotesi, dato che M e una varieta differenziabile m-dimensionale, esisteun intorno aperto U di x in M con un diffeomorfismo φ : A → U (cartalocale), essendo A ⊆ Rm aperto. Sia ψ = φ−1 : U → A il diffeomorfismoinverso. Siccome ψ e C∞, per definizione si estende a un’applicazione C∞
ψ : U → Rm,
essendo U ⊆ Rk un aperto contenente U (possiamo anche supporre U =U ∩ M). Consideriamo gli aperti A′ = A × Rm ⊆ R2m e U ′ = T (U) =π−1(U) ⊆ TM (Osservazione ??) e l’applicazione φ′ : A′ → U ′ data da
(r, s) 7→ (φ(x), drφ(s)) .
Affermo che φ′ e un diffeomorfismo. In effetti, per vederlo basta osservareche l’applicazione (ovviamente C∞) ψ′ : U ′ → A′ data da
(x′, v′) 7→(ψ(x′), dx′ψ(v′)
)=(ψ(x′), dx′ψ(v′)
)(x′ ∈ U, v′ ∈ Tx′M)
ne e l’inversa. Abbiamo per ogni (r, s) ∈ A′ e (x′, v′) ∈ U ′:
ψ′ ◦ φ′ ((r, s)) =(ψ ◦ φ(r), dφ(r)ψ ◦ drφ(s)
)=(ψ ◦ φ(r), dr(ψ ◦ φ)(s)
),
φ′ ◦ ψ′ ((x′, v′)) =(φ ◦ ψ(x′), dψ(x′)φ ◦ dx′ψ(v′)
)=(φ ◦ ψ(x′), dx′(φ ◦ ψ)(v′)
).
Si ha ψ ◦ φ(r) = r, φ ◦ ψ(x′) = x′ per ogni r ∈ A e x′ ∈ U per costruzione.Inoltre, per costruzione, ψ ◦ φ = ψ ◦ φ = idA, e quindi dr(ψ ◦ φ) = idRm perogni r ∈ A. Cio dimostra che ψ′ ◦ φ′ = idA′ .
Sia poi (x′, v′) ∈ A′. Sia γ : (−ε, ε) → U ⊆ M una curva C∞ conγ(0) = x′, γ′(0) = v′. Abbiamo dx′(φ ◦ ψ)(v′) = γ′(0), essendo
γ = (φ ◦ ψ) ◦ γ : (−ε, ε)→ U.
Maγ(t) = φ ◦ ψ (γ(t)) = φ (ψ(γ(t))) ,
perche ψ = ψ su U e γ(t) ∈ U . Quindi, essendo ψ = φ−1, γ = γ e dx′(φ ◦ψ)(v′) = v′ per ogni (x′, v′) ∈ U ′. Cio dimostra che φ′ ◦ψ′ = idU ′ . Il teoremae dimostrato.
57

10 Il differenziale
SianoM ⊆ Rk eN ⊆ Rl varieta differenziabili. Sia f : M → N un’applicazioneC∞. Per definizione, esistono quindi un aperto Z ⊆ Rk con Z ⊇ M e unamappa C∞ (nel senso usuale) f : Z → Rl tale che f = f |M .
Proposizione 10.1. Sia p ∈M . Se v ∈ Tp(M), allora dpf(v) ∈ Tf(p)N .
Dim. Possiamo vederlo in due modi. Usando l’interpetazione dei vettoritangenti come vettori velocita, sia
γ : (−ε, ε) −→M
una curva C∞ tale che γ(0) = p e γ′(0) = v. Abbiamo allora
dpf(v) = γ′(0),
essendo γ = f ◦ γ : (−ε, ε) → N la curva composta. Poiche d’altra partef = f su M e γ(t) ∈ M per ogni t, γ e una curva C∞ su N , e pertantoγ′(0) ∈ Tf(p)N .
Alternativamente, possiamo usare direttamente la definizione di spaziotangente in termini di carte locali. Scegliamo carte locali φ : A → U perM nell’intorno di p e ψ : B → V per N nell’intorno di f(p). Quindi A ⊆Rk, B ⊆ Rl, U ⊆ M e V ⊆ N sono aperti, p ∈ U , q ∈ V e φ, ψ sonodiffeomorfismi. Per ogni a ∈ A e b ∈ B abbiamo, per definizione,
Tφ(a)(M) = daφ(Rm), Tψ(b)(N) = dbψ
(Rn).
Possiamo supporre senza perdita di generalita che f(U) ⊆ V , eventualmentesostituendo U con U ∩ f−1(V ). Abbiamo cosı un diagramma commutativo:
Uf|U−→ V
↑ ↑A
fψ,φ−→ B,
(14)
dove le frecce verticali sono i diffeomorfismi φ e ψ, e fψ,φ e definita dallacommutativita del diagramma, cioe
fψ,φ = ψ−1 ◦ f ◦ φ : A −→ B. (15)
Chiameremo fψ,φ la rappresentazione locale di f nelle carte locali φ e ψ.Essendo composizione di funzioni C∞, fψ,φ e C∞.
58

Poniamo per semplicita g = fψ,φ. Sia σ : A → Rl la composizioneσ = f ◦ φ = ψ ◦ fψ,φ. Per ogni a ∈ A, il differenziale daσ : Rm → Rl e datoda
daσ = dg(a)ψ ◦ dag = dφ(a)f ◦ daφ.
Quindi, se p ∈ U , p = φ(a) e f(p) = ψ(b) si ha b = g(a) ed otteniamo
dpf(TpM) = dφ(a)f ◦ daφ(Rm) = dg(a)ψ ◦ dag(Rm)
⊆ dg(a)ψ(Rn) = dbψ (Rn) = Tf(a)N. (16)
Proposizione 10.2. Nelle stesse ipotesi, siano f1, f2 : Z → Rl due diverseestensioni C∞ di f (qui Z ⊆ Rk e come sopra un aperto contenente M).Allora dpf1(v) = dpf2(v) per ogni p ∈M e ogni v ∈ Tp(M).
Dim. Cio segue dalla dimostrazione precedente. Sia (p, v) ∈ TM e sia comesopra γ : (−ε, ε) → M una curva C∞ tale che γ(0) = p e γ′(0) = v. AlloraAllora dpfj(v) = γ′j(0), essendo γ′j(0) = fj ◦ γ per j = 1, 2. Ma poiche
γ(t) ∈M e fj = f su M , abbiamo γ1 = γ2 e quindi l’asserto.
Definizione 10.1. Siano M ⊆ Rk e N ⊆ Rl varieta differenziabili. Siaf : M → N un’applicazione C∞. In virtu delle Proposizioni ?? e ??, perogni p ∈M risulta ben definita un’applicazione lineare dpf : TpM → Tf(p)N .Chiameremo dpf il differenziale di f in p.
Osservazione 10.1. Tornando alla costruzione locale vista nella dimostrazionedella Proposizione ??, i differenziali di f in p ∈ U e il differenziale dellarappresentazione locale di f nelle carte locali ψ e φ, g = ψ−1 ◦ f ◦ φ sonolegati dalla relazione dg(a)ψ◦dag = dφ(a)f ◦daφ per ogni a ∈ A, che possiamoriscrivere nella forma
dφ(a)f = dg(a)ψ ◦ dag ◦ (daφ)−1 .
In altri termini, ponendo p = φ(a), b = g(a), q = f(p) = ψ(b), abbiamo ildiagamma commutativo
dpfTpM −→ TqN
daφ ↑ ↑ dbψRm −→ Rn.
dag
(17)
Poiche φ e ψ sono diffeomorfismi, dg(a)ψ e daφ sono isomorfismi. Quindirango(dφ(a)f) = rango(dag), per ogni a ∈ A.
59

Esempio 10.1. Sia f : U → V una mappa C∞, essendo U ⊆ Rm e V ⊆ Rnaperti. Per ogni p ∈ U e q ∈ V , abbiamo isomorfismi naturali TpU ∼= Rm eTqV ∼= Rn. Il differenziale dpf : TpU → Tf(p)V descritto sopra e ovviamenteuguale al differenziale usuale dpf : Rm → Rn, come segue immediatamentedalla costruzione.
Esempio 10.2. Identifichiamo il piano R2 con il piano complesso C nel modousuale, associando al punto (x, y)t ∈ R2 il numero complesso z = x+ iy ∈ C.Sia f : S1 → S1 la mappa f(eiθ) = ei2θ (θ ∈ R). Chiaramente, f e bendefinita ed e in effetti indotta per restrizione dalla mappa f : C→ C, z 7→ z2.Abbiamo (x+ iy)2 = (x2 − y2) + i2xy. Pertanto, in coordinate reali,
f
((xy
))=
(x2 − y2
2xy
).
La matrice Jacobiana di f in p = (x, y)t e data da
Jp(f) =
[2x −2y2y 2x
]= 2
[x −yy x
].
Se p = (cos(θ), sin(θ))t ∈ S1, f(p) = p2 = (cos(2θ), sin(2θ))t ∈ S1, abbiamo
Tp(S1) =
(cos(θ)sin(θ)
)⊥= span
{(− sin(θ)cos(θ)
)},
Tp2(S1) =
(cos(2θ)sin(2θ)
)⊥= span
{(− sin(2θ)cos(2θ)
)},
dpf
((− sin(θ)cos(θ)
))= dpf
((− sin(θ)cos(θ)
))= 2
[cos(θ) − sin(θ)sin(θ) cos(θ)
](− sin(θ)cos(θ)
)= 2
(− sin(2θ)cos(2θ)
).
Esempio 10.3. Rivisitiamo l’esempio precedente usando la rappresentazionedi f in carte locali. Consideriamo, ad esempio, le carte locali
φ :(−π
2,π
2
)→ U = {g ∈ S1 : <(g) > 0}, ψ : (−π, π)→ V = S1 \ {−1}
date da ϑ 7→ (cos(ϑ), sin(ϑ))t. Per ogni θ ∈(−π
2, π2
),
dθφ(1) =
(− sin(θ)cos(θ))t
)60

e analogamente per ψ. Si vede facilmente che g = fφ,ψ :(−π
2, π2
)→ (−π, π)
e la moltiplicazione per 2, e quindi riotteniamo il risultato precedente perθ ∈
(−π
2, π2
).
Esempio 10.4. Consideriamo la mappa f : S2 → R data da
f
xyz
= z
xyz
∈ S2
.
f e la restrizione a S2 ⊆ R dell’applicazione lineare π : R3 → R data dallaproiezione sulla terza coordinata. Pertanto f e C∞ e inoltre per ogni p ∈ S2
si hadpf = dpπ|TpS2 = π|p⊥ : p⊥ → R.
Abbiamo
ker(π) = span
1
00
,
010
,
onde
ker(dpf) = p⊥ ∩ span
1
00
,
010
.
Quindi il differenziale dpf e 6= 0 (e pertanto suriettivo) se e solo se
p⊥ 6⊆ span
1
00
,
010
.
Ora, date le dimensioni, la condizione
p⊥ ⊆ span
1
00
,
010
equivale alla
p⊥ = span
1
00
,
010
,
ossia alla p = ±(0, 0, 1)t. Quindi dpf non e suriettivo (ossia si annulla) se esolo se vale quest’ultima relazione, ovvero se e solo se p = ±(0, 0, 1)t = ±e3.
61

Esempio 10.5. Possiamo ottenere lo stesso risultato usando la rappresen-tazione locale di f rispetto alle carte locali in un atlante. Ad esempio, siaD ⊆ R2 il disco aperto di centro l’origine e raggio 1 e sia U ⊆ S2 la calottaz > 0. Consideriamo la carta locale
φ : D −→ U
data da
φ
((xy
))=
xy√
1− x2 − y2
.
Usiamo su R la carta ψ = idR : R → R. La rappresentazione locale di frispetto alle carte φ e ψ e la mappa g : D → R data da
g
((xy
))=√
1− x2 − y2.
La matrice Jacobiana di g in a = (x, y)t ∈ D e data da
Ja(g) =[− x√
1−x2−y2− y√
1−x2−y2
],
che ha rango 1 se (x, y) 6= (0, 0), rango 0 se (x, y) = (0, 0). Siccome
φ
((00
))=
001
,
otteniamo che dpf si annulla per p = (0, 0, 1)t e in nessun altro punto dellacalotta superiore. Analogamente si ragione per le altre calotte.
Esempio 10.6. Sia f : (R2 \ {0})× R2 → R3 l’applicazione C∞ data
f(x1, x2, x3, x4) =1√
1 + x23(x21 − x22, 2x1x2, x3)t.
Allora f(S1 × S1) ⊆ S2; sia f : S1 × S1 → S2 l’applicazione C∞ indotta perrestrizione da f . Se (p, q) ∈ S1× S1, possiamo calcolare il rango di d(p,q)f indiversi modi. Innanzitutto,
d(p,q)f : T(p,q)(S1 × S1)→ Tf(p,q)(S
2) ⊆ R3
e indotto dalla restrizione a T(p,q)(S1 × S1) ⊆ R2 ×R2 di d(p,q)f : R2 ×R2 →
R3; quindi coincide con la mappa indotta per restrizione del codominio daldifferenziale
d(p,q)f : T(p,q)(S1 × S1)→ R3,
62

dove f : S1×S1 → R3 e la restrizione di f a S1×S1. Ora S1×S1 e copertoda carte locali della forma
φ× ψ : (a, b)× (c, d)→ U × V ⊆ S1 × S1
dove (a, b), (c, d) ⊂ R sono intervalli aperti con b− a, d− c < 2π, U, V ⊆ S1
sono aperti, e φ : (a, b)→ U , ψ : (a, b)→ V sono diffeomorfismi della forma
φ(θ) = (cos(θ), sin(θ))t, ψ(ϑ) = (cos(ϑ), sin(ϑ))t.
Usando le formule di Prostaferesi, la rappresentazione di f nella carta localeφ× ψ e l’applicazione
g(θ, ϑ) =1√
1 + cos(ϑ)2(cos(2θ), sin(2θ), cos(ϑ))t.
La matrice Jacobiana di g e
J(θ,ϑ)(g) =
−2 sin(2θ)r(ϑ) cos(2θ)s(ϑ)2 cos(2θ)r(ϑ) sin(2θ)s(ϑ)
0 t(ϑ)
,ove
r(ϑ) =1√
1 + cos(ϑ)2, s(ϑ) = − cos(ϑ) sin(ϑ)
(1 + cos(ϑ)2)3/2
e
t(ϑ) = − sin(ϑ)
(1 + cos(ϑ)2)3/2[(1 + cos(ϑ)2)2 + cos(ϑ)2
].
Pertanto J(θ,ϑ)(g) ha rango ≥ 1 ovunque, e rango = 2 se e solo se sin(ϑ) 6= 0,ovvero ϑ 6= kπ con k ∈ Z. Quindi d(p,q)f e un isomorfismo in tutti i (p, q)con q 6= (±1, 0) ∈ S1, ed ha rango 1 se q = (±1, 0).
Alternativamente, possiamo anche scegliere una carta locale τ per S2 erappresentare direttamente f nelle carte φ×ψ e τ . Consideriamo ad esempiol’aperto T ⊆ S2 dato da T = {(x, y, z) ∈ S2 : z > 0}, e la carta
τ : (x, y) ∈ D 7→(x, y,
√1− x2 − y2
)t∈ V ⊆ S2,
ove D = {(x, y)t : x2 + y2 < 1}, e su S1×S1 una carta φ×ψ come sopra macon (c, d) = (0, π). Allora f(U × V ) ⊆ T , e la rappresentazione locale di fnelle carte date e la funzione
g(θ, ϑ) =1√
1 + cos(ϑ)2
(cos(2θ), sin(2θ)
)t.
63

La matrice Jacobiana di g e
J(θ,ϑ)(g) =
[− sin(θ)r(ϑ) cos(θ)s(ϑ)cos(θ)r(ϑ) sin(θ)s(ϑ)
].
Ne ricaviamo come sopra che il rango e ovunque ≥ 1, = 2 se e solo sesin(ϑ) 6= 0 (cos(ϑ) > 0 sulla carta τ).
Esempio 10.7. Si ricordi che una matrice A ∈Mn(R) e ortogonale se e solose le sue colonne A1, . . . , An sono una base ortonormale di Rn per il prodottoscalare standard. In particolare, se A e ortogonale tutte le colonne di Ahanno norma 1, cioe appartengono a Sn−1. Consideriamo l’applicazione f :O(n)→ Sn−1 data da f(A) = A1. f e la restrizione a O(n) dell’applicazionelineare f : Mn(R)→ Rn data da f(A) = A1, e quindi e C∞. Essendo lineare,f coincide col proprio differenziale in ogni punto. Quindi, se A ∈ O(n) eB ∈ TA
(O(n)
),
dAf(B) = dAf(B) = f(B) = B1.
Verifichiamo che effettivamente
dAf(B) = B1 ∈ Tf(A)(Sn−1
).
Si haTf(A)
(Sn−1
)= TA1
(Sn−1
)= span
{A1}⊥
.
Quindi dobbiamo verificare che se B ∈ TA (O(n)) allora 〈B1, A1〉 = 0, ove< , > denota il prodotto scalare standard su Rn. La condizione che B ∈TA (O(n)) si traduce nella ABt + BAt = 0. Moltiplicando a sinistra perA−1 = At e a destra per A otteniamo la relazione equivalente BtA+AtB = 0.Sia Cij l’entrata (i, j)-ma di una matrice C. Abbiamo le condizioni
0 =(BtA+ AtB
)ij
=∑k
(BkiAkj + AkiBkj)
=⟨Bi, Aj
⟩+⟨Ai, Bj
⟩per ogni i, j = 1, . . . , n. Per i = j otteniamo in particolare⟨
Ai, Bi⟩
= 0 (i = 1, . . . , n)
che per i = 1 e quanto volevamo verificare.
64

Esempio 10.8. Consideriamo l’applicazione f : O(n) → O(n) data daf(A) = A−1. Si ha A−1 = At per A ∈ O(n) e quindi f ammette due ovvie es-tensioni C∞ su un aperto di Mn(R) contente O(n). Sia infatti GL(n,R)l’aperto delle matrici invertibili, e consideriamo le due applicazioni fj :GL(n,R)→ GL(n,R) (j = 1, 2) definite ponendo f1(A) = At e f2(A) = A−1.
Chiaramente, fj
∣∣∣O(n)
= f per j = 1, 2. E ovvio che f1, essendo lineare, e
C∞ e coincide con il proprio differenziale in ogni punto. Che f2 sia C∞ seguedall’espressione della matrice inversa in termini della matrice aggiunta notadall’Algebra Lineare. Per quanto dimostrato, deve essere
dAf(B) = dAf1(B) = dAf2(B) ∈ TA−1 (O(n))
se A ∈ O(n) e B ∈ TA (O(n)). Verifichiamo esplicitamente che dAf1(B) =dAf2(B) ∈ TA−1 (O(n)). Poiche GL(n,R) e aperto nello spazio vettorialeMn(R), si ha TA (GL(n,R)) ∼= Mn(R) per ogni A ∈ GL(n,R). Quindi dAfj ∈End (Mn(R)) per ogni A invertibile e j = 1, 2. Chiaramente,
dAf1(B) = Bt.
D’altra parte la condizione ABt +BAt = 0, moltiplicata a sinistra per At e adestra per A diviene BtA+AtB = 0, ovvero Bt (At)
t+At (Bt)
t= 0. Quindi
dAf1(B) = Bt ∈ TAt (O(n)).Calcoliamo ora dAf2 per A ∈ GL(n,R). Si ha (Appendice)
(I + xB)−1 = I − xB + x2B2 − · · ·
e quindi
(A+ xB)−1 =[A(I + xA−1B)
]−1=
(I − xA−1B + x2
(A−1B
)2 − · · ·)A−1= A−1 − xA−1BA−1 +O(x2).
Ne segue chiaramente
dAf2(B) = −A−1BA−1 (A ∈ GL(n,R), B ∈Mn(R)).
Supponiamo ora A ∈ O(n) e dimostriamo che dAf2(B) = dAf1(B) se B ∈TA (O(n)). Si ha in tal caso A−1 = At e BAt + ABt = 0, quindi dAf1(B) =Bt = −A−1BAt = −A−1BA−1 = dAf2(B).
Esercizio 10.1. Consideriamo l’applicazione g : O(n)× O(n)→ O(n) datada g(A,B) = AB. Calcolare d(A,B)g al variare di (A,B) ∈ O(n) × O(n) edimostrare esplicitamente che l’immagine e contenuta in TAB
(O(n)
).
65

Esempio 10.9. Sia A ∈ U(n), cioe AAt
= I. Per il teorema di Binet,1 = det(I) = det(A)det(A) = |det(A)|2. Quindi det(A) ∈ S1. Consideriamol’applicazione f = det : U(n) → S1. Essendo la restrizione dell’applicazionef = det : Mn(C) → C, ovviamente C∞ (il determinante e un polinomioomogeneo di grado n nelle entrate della matrice argomento), f : U(n)→ S1
e C∞. Dimostriamo esplicitamente che dAf(B) ∈ Tdet(A) (S1) se A ∈ U(n) eB ∈ TA (U(n)). Si ha, per C ∈Mn(R) e ε→ 0:
det(I + ε C) = 1 + ε tr(C) +O(ε2).
Quindi, per A,B ∈Mn(R) otteniamo
dAf(B) = limε→0
1
ε[det(A+ εB)− det(A)]
= limε→0
1
εdet(A)
[det(I + εA−1B)− I
]= det(A) tr(A−1B).
Poiche Tdet(A)(S1) = det(A)⊥, cioe il complemento ortogonale di det(A) per il
prodotto Euclideo standard, e poiche det(A)⊥ = iR det(A), basta dimostrareche se A ∈ U(n) e B ∈ TA(U(n)) allora tr(A−1B) ∈ iR. Ma B ∈ TA(U(n))
significa ABt+ BA
t= 0, da cui, moltiplicando a sinistra per A
te a destra
per A,
AtB +BA = 0.
Prendendo le tracce, tr(A−1B) = tr(AtB) = −tr(B
tA) = −tr(A−1B).
Esempio 10.10. Sia f : M → N un’applicazione C∞, ove M ⊆ Rk e N ⊆ Rlsono varieta differenziabili di dimensione m e n rispettivamente. Sia
grafo(f) = {(x, f(x)) : x ∈M} ⊆ Rk × Rl.
Allora grafo(f) e una varieta differenziabile diffeomorfa a M . Se x ∈ M ,siano U ⊆ M un intorno aperto di x in M e φ : A → U un diffeomorfismocon un sottoinsieme aperto A ⊆ Rm. Allora U ′ = {(x′, f(x′)) : x′ ∈ U} e unintorno aperto di (x, f(x)) in grafo(f) e φ′ : A→ U ′ e un diffeomorfismo, oveφ′(r′) =
(φ(r′), f(φ(r′))
). Sia x = φ(r) e quindi (x, f(x)) = φ′(r). Lo spazio
tangente a grafo(f) in (x, f(x)) e allora
T(x,f(x))(grafo(f)) = drφ′ (Rm) = {(drφ(s), dr(f ◦ φ)(s)) : s ∈ Rm}
= {(drφ(s), dxf ◦ drφ(s)) : s ∈ Rm} = {(v, dxf(v)) : v ∈ TxM}= grafo(dxf) ⊆ TxM × Tf(x)N ⊆ Rk+l.
66

Definizione 10.2. Siano M ⊆ Rm e N ⊆ Rl varieta differenziabili. Siaf : M → N un’applicazione C∞. Il differenziale di f e l’applicazione
df : TM −→ TN
definita da df(p, v) = (f(p), dpf(v)).
Proposizione 10.3. Nelle ipotesi della Definizione ??, df e un’applicazioneC∞.
Dim. Sia f : Z → Rl un’estensione di f come sopra. Abbiamo TM ⊆Rk ×Rk ∼= R2k e TN ⊆ Rl ×Rl ∼= R2l. Vogliamo dimostrare che esistono unaperto Z ′ ⊆ R2k con TM ⊆ Z ′ e una funzione C∞
F : Z ′ −→ R2k
che estende df . Poniamo Z ′ = Z × Rk ⊆ R2k e consideriamo l’applicazioneF : Z ′ → Rl × Rl data da
F (x, v) =(f(x), dxf(v)
).
E chiaro che F e C∞ e che F estende df .
Teorema 10.1. (La regola della catena) Siano M, N, Z varieta differenzia-bili. Siano f : M → N e g : N → Z mappe C∞. Sia p ∈M . Allora
dp(g ◦ f) = df(p)g ◦ dpf : TpM −→ Tg(f(p))Z.
Dim. Supponiamo M ⊆ Rk, N ⊆ Rl, Z ⊆ Rs. Per definizione, essendof una funzione C∞ esiste un aperto U ⊆ Rk con M ⊆ U e una funzioneC∞ f : U → Rl che estende f , ovvero f(p) = f(p) se p ∈ M . Allo stessomodo, essendo g una funzione C∞ esiste un aperto V ⊆ Rl con N ⊆ V e unafunzione C∞ g : V → Rs che estende g, ovvero g(q) = g(q) se q ∈ N . Si haallora
dpf = dpf∣∣∣TpM
: TpM −→ Tf(p)N ⊆ Rl,
df(p)g = df(p)g∣∣Tg(p)N
: Tf(p)N −→ Tg(f(p))Z ⊆ Rl.
Senza perdita di generalita, possiamo supporre che f(U) ⊆ V . Infatti,in caso contrario basta sostituire U con U ′ = f−1(V ) ⊆ U e considerare larestrizione di f a U ′. In effetti, essendo f continua, f−1(V ) e un sottoinsiemeaperto di U , e quindi di Rk. Inoltre, essendo N ⊆ V e f(M) = f(M) ⊆ N ,si ha M ⊆ f−1(N) ⊆ f−1(V ) = U ′.
67

Possiamo allora considerare la restrizione g ◦ f : U → Rs. Chiaramente,se p′ ∈M allora f(p′) = f(p′) ∈ N e quindi
g ◦ f(p′) = g(f(p′)) = g(f(p′)) = g(f(p′)) = g ◦ f(p′).
Quindi g ◦ f e un’estensione C∞ di g ◦ f a U . Pertanto,
dp(g ◦ f) = dp(g ◦ f)∣∣∣TpM
: TpM −→ Tg(f(p))Z ⊆ Rs.
Usando la regola della catena per mappe C∞ tra aperti Euclidei, abbiamo
dp(g ◦ f) = df(p)g ◦ dpf : Rk −→ Rs.
Se ora v ∈ TpM concludiamo che
dp(g ◦ f)(v) = dp(g ◦ f)(v) = df(p)g ◦ dpf(v) = df(p)g(dpf(v)
)= df(p)g
(dpf(v)
)= df(p)g ◦ dpf(v).
Esercizio 10.2. Sia M una varieta differenziabile. Dimostrare che per ognip ∈M si ha dp(idM) = idTpM .
Sia ora f : M → N un diffeomorfismo tra varieta differenziabili M eN , con diffeomorfismo inverso f−1 : N → M . Allora f−1 ◦ f = idM ef ◦ f−1 = idN . Quindi per ogni p ∈M si ha
idTpM = dp(f−1 ◦ f) = df(p)
(f−1)◦ dpf,
idTf(p)N = df(p)(f−1 ◦ f
)= dpf ◦ df(p)(f−1).
Quindi
Corollario 10.1. Se f : M → N e un diffeomorfismo tra varieta differenzi-abili M e N , allora per ogni p ∈M si ha
df(p)(f−1) =
(dpf)−1
: Tf(p)N −→ TpM.
Corollario 10.2. Siano f : M → N e g : N → P mappe C∞ tra varietadifferenziabili. Siano df : TM → TN e dg : TN → TP le rispettive mappedifferenziali. Allora la mappa differenziale d(g ◦ f) : TM → TP della com-posizione g ◦ f : M → P e la composizione di dg e df :
d(g ◦ f) = dg ◦ df : TM −→ TP.
68

Dim. Sia (p, v) ∈ TM . Sia ha
d(g ◦ f)(p, v) = (g ◦ f(p), dp(g ◦ f)(v)) =(g(f(p)
), df(p)g
(dpf(v)
))= dg
(f(p), dpf(v)
)= dg
(df(v)
)= dg ◦ df(p, v).
Corollario 10.3. Sia f : M → N un diffeomorfismo tra varieta differenzia-bili, con diffeomorfismo inverso f−1 : N → M . Allora df : TM → TN e undiffeomorfismo, con diffeomorfismo inverso (df)−1 = d(f−1) : TN → TM .
Dim. Le applicazioni df : TM → TN e d(f−1) : TN → TM sono C∞ esoddisfano:
df ◦ d(f−1) = d(f ◦ f−1) = didN = idTN ,
df−1 ◦ df = d(f−1 ◦ f) = didM = idTM .
11 Diffeomorfismi locali.
Definizione 11.1. Siano M e N varieta differenziabili e sia f : M → Nuna mappa C∞. Diremo che f e un diffeomorfismo locale in p ∈ M seil differenziale dpf : TpM → Tf(p)N e un isomorfismo. Diremo che f e undiffeomorfismo locale se e un diffeomorfismo locale in ogni p ∈M .
Osservazione 11.1. Se f : M → N e un diffeomorfismo locale in p ∈ M ,allora dim(TpM) = dim(Tf(p)N), e quindi dim(M) = dim(N).
Esempio 11.1. Sia f : R → S1 la mappa data da f(ϑ) = (cos(ϑ), sin(ϑ))t.Allora
Jp(f) =
[− sin(ϑ)cos(ϑ)
](ϑ ∈ R).
Quindi dpf 6= 0, e quindi dpf e un isomorfismo, per ogni ϑ ∈ R. Pertanto,f un diffeomorfismo locale, non iniettivo poiche f(ϑ) = f(ϑ+ 2kπ) per ognik ∈ Z.
Esercizio 11.1. Dimostrare che l’applicazione f : S1 → S1 data da f(eiθ) =eikθ e un diffemorfismo locale, per ogni intero k 6= 0. Chiaramente, perk 6= ±1 il diffeomorfismo locale f non e iniettivo, ma e suriettivo (l’immagineinversa di ogni p ∈ S1 consiste di |k| punti distinti).
Esempio 11.2. Sia k ≥ 1 un intero e consideriamo il luogo
R ={
(x, y, z)t ∈ R3 : xk + yk + zk = 1}.
69

AbbiamoR = f−1(1), essendo f : R3 → R la funzione f(x, y, z) = xk+yk+zk.Dato che la matrice Jacobiana di f in p = (x, y, z)t ∈ R3 e data da
Jp(f) =[kxk−1 kyk−1 kzk−1
],
concludiamo che dpf : R3 → R e sempre suriettivo per k = 1, mentre perk ≥ 2 e suriettivo per ogni p 6= 0 ed e nullo in p = 0. Quindi per k = 1 lafunzione f non ha valori singolari, mentre per k ≥ 2 il solo valore singolare dif e 0 = f(0) ∈ R. Ne segue cheR e una varieta differenziabile 2-dimensionale,e che per ogni p = (x, y, z)t ∈ R lo spazio tangente a R in p e dato da
TpR = ker(dpf) =
a
bc
: xk−1a+ yk−1b+ zk−1c = 0
.
Consideriamo ora la mappa
h : R −→ S2
data dalla restrizione a R ⊆ R3 \ {0} della mappa C∞
H : R3 \ {0} −→ S2
data da H(v) = v/‖v‖. Abbiamo quindi, per ogni p ∈ R (si veda l’esempio?? qui di seguito)
ker(dph) = TpR ∩ dpH = TpR ∩ span{p}.
Si ha TpR ∩ span{p} 6= 0 se e solo se span{p} ⊆ TpR se e solo se p ∈ TpR.Se p = (x, y, z)t ∈ R, abbiamo p ∈ TpR se e solo se 0 = xk−1x + yk−1y +zk−1z = xk + yk + zk, ma questo contraddice xk + yk + zk = 1. Quindi si haTpR∩ span{p} = 0, e pertanto ker(dpf) = 0, per ogni p ∈ R. Ne segue che fe un diffeomorfismo locale in ogni p ∈ R, ovvero che f e un diffeomorfismolocale.
Siano ora p = (x, y, z)t, p′ = (x′, y′, z′)t ∈ R tali che f(p) = f(p′), ovvero1‖p‖p = 1
‖p′‖p′. Esiste pertanto λ ∈ C tale che p′ = λp, ovvero x′ = λx,
y′ = λy, z′ = λz (in effetti, λ = ‖p′‖‖p‖ ). Si ha 1 = f(p) = f(p′) e quindi λk = 1,
onde (essendo λ > 0), λ = 1 e quindi p = p′. Pertanto f e iniettiva, qualeche sia l’intero k ≥ 1.
Se k e pari, possiamo scrivere k = 2n per qualche intero n ≥ 1 e per-tanto dalla x2n + y2n + z2n = 1 segue |x| ≤ 1, |y| ≤ 1, |z| ≤ 1 e quindi‖p‖ =
√x2 + y2 + z2 ≤
√3. Quindi R e chiusa e limitata, ed e pertanto
compatta (si veda la Figura ?? per il caso k = 4). Ne segue che f(R) ⊆ S2
70

Figure 5: x4 + y4 + z4 = 1
e un sottoinsieme compatto, quindi chiuso di S2; essendo aperto, poiche undiffeomorfismo locale e una mappa aperta, e tutto S2. Quindi f e anchesuriettiva ed essendo un diffeomorfismo locale biiettivo e un diffeomorfismo.
Alternativamente, possiamo vedere che f e suriettiva per k = 2n parianche osservando che dato un qualsiasi p0 = (x0, y0, z0)
t ∈ S2 si ha η0 =:
x2n0 + y2n0 + z2n0 > 0 e il punto p1 = 2n
√1η0p0 soddisfa chiaramente p0 ∈ R e
f(p1) = p0.Se k e dispari, R contiene il luogo non limitato dei punti della forma
(x,−x, 1) al variare di x ∈ R. Pertanto R non e compatta. Ne segue chef non puo essere un diffeomorfismo tra il luogo compatto S2 e il luogo noncompatto R; essendo un diffeomorfismo locale iniettivo, non puo essere anchesuriettiva.
Esercizio 11.2. Per k dispari, dimostrare che il complementare dell’immaginedi f in S2 contiene l’intersezione S2 ∩ D, essendo D ⊆ R3 il luogo (conicoe non vuoto per k dispari) di equazione xk + yk + zk = 0. Ad esempio,(1/ k√
2,−1/ k√
2, 0) non sta nell’immagine di f .
Esercizio 11.3. Ripetere l’analisi precedente per il luogo
R =
{(x1, . . . , xm)t ∈ Rm :
m∑i=1
xki = 1
}
per ogni m ≥ 2.
12 Punti di sommersivita e sommersioni.
Definizione 12.1. Siano M e N varieta differenziabili e sia f : M → N unamappa C∞. Un punto p ∈ M si dice di sommersivita per f , o equivalente-mente f si dice sommersiva in p, se il differenziale dpf : TpM → Tf(p)N esuriettivo.
Osservazione 12.1. Se f : M → N e sommersiva in un punto p ∈M , chiara-mente dim(M) ≥ dim(N).
Osservazione 12.2. Sia f : M → N una mappa C∞ e sia p ∈ M . Siam = dim(M), n = dim(N) e siano φ : A → U e τ : B → V carte locali
71

per M nell’intorno di p e per N nell’intorno di f(p), rispettivamente. QuindiA ⊆ Rm, B ⊆ Rn, U ⊆M e V ⊆ N sono aperti, p ∈ U e f(p) ∈ V , e inoltre φe τ sono diffeomorfismi. Supponiamo ancora senza perdita di generalita chef(U) ⊆ V . Se g : A→ B e la rappresentazione locale di f nelle carte date, ese p = φ(x), abbiamo visto che dpf : TpM → Tf(p)N e dxg : Rm → Rn hannolo stesso rango. Quindi, f e sommersiva in p se e solo se g e sommersiva inx.
Teorema 12.1. Supponiamo che f : M → N sia sommersiva in p ∈ M .Allora esistono carte locali φ : A→ U per M nell’intorno di p e ψ : B → Vper N nell’intorno di f(p), tali che f(U) ⊆ V e la rappresentazione localeg : A→ B di f nelle carte φ e ψ sia la mappa (x1, . . . , xm) 7→ (x1, . . . , xn).
Dim. Si scelgano carte locali φ e ψ come nell’Osservazione ?? e si consideriancora il diagramma commutativo (??). Dato che g e sommersiva in x, per ilteorema della sommersione locale possiamo trovare un intorno aperto A′ ⊆ Adi x, un altro aperto A ⊆ Rm ∼= Rn×Rn e un diffeomorfismo α : A→ A′ taliche la composizione g◦α : A→ B sia la proiezione sulle prime n componenti.Poiche φ e un diffeomorfismo, l’immagine U =: φ
(A)⊆ U e un aperto di
U (e quindi di M) contenente p . In quanto composizione di diffeomorfismi,φ =: φ ◦ α : A → U e un diffeomorfismo, e quindi una carta locale per Mnell’intorno di p. Per costruzione, la rapresentazione locale di f nella coppiadi carte locali φ, ψ e la proiezione sulle prime n componenti.
Definizione 12.2. Sia f : M → N un’applicazione C∞ di varieta differen-ziabili. Diremo che q ∈ N e un valore regolare di f se f e sommersiva inogni p ∈ f−1(q). In caso contrario, diremo che q e un valore singolare dif .
Definizione 12.3. SiaN una varieta differenziabile. Un sottoinsieme Z ⊆ Nsi dice avere misura nulla in N se per ogni carta locale ψ : B → V ⊆ N diN l’immagine inversa ψ−1(Z) ha misura di Lebesgue nulla in B ⊆ Rdim(N).
Teorema 12.2. (Sard) L’insieme S(f) ⊆ N dei valori singolari di f hamisura nulla in N .
Esempio 12.1. Sia f un polinomio (non nullo) in una variabile di grador ≥ 1 e si consideri il luogo
C ={
(x, y)t ∈ R2 : y + f(x) = 0}
= grafo(−f).
Chiaramente C e una varieta differenziabile 1-dimensionale, con spazio tan-gente nel punto p = (x,−f(x))t ∈ C dato da
Tp(C) =
{(ab
): f ′(x)a+ b = 0
}= span
{(1
−f ′(x)
)}.
72

La proiezione sul primo fattore, (x, y) 7→ x induce un diffeomorfismo di Ccon R. Sia πC = π|C : C → R l’applicazione C∞ indotta per restrizione dallaproiezione sul secondo fattore, π : (x, y) 7→ y. Si ha
ker(π) = span
{(10
)},
e quindi, dato p ∈ C, essendo dpπ = π|TpC abbiamo
ker(dpπC) = ker(π) ∩ TpC = span
{(10
)}∩ TpC.
Pertanto ker(dpπC) = {0}, ovvero πC e un diffeomorfismo locale in p, se esolo se f ′(x) 6= 0. Pertanto y ∈ R e un valore singolare di f se e solo se esistex ∈ R tale che y = −f(x) e f ′(x) = 0. Se f ′(x) 6= 0 per ogni x ∈ R tale chey = −f(x), y e invece un valore regolare di f .
Se ad esempio f(x) = xr (r ≥ 2) , y = 0 e il solo valore singolare di f .In generale, se x0 e un punto di massimo o minimo relativo, oppure un
punto di flesso per f , allora −f(x0) e un valore singolare di f .Ovviamente, le stesse considerazioni valgono per funzioni piu generali dei
polinomi. Quindi l’immagine dei punti critici di f ha misura nulla.
Esempio 12.2. Vediamo S1 nel modo standard come il cerchio unitariocentrato nell’origine in R2 e quindi M =: S1 × S1 come un sottoinsieme diR4. Consideriamo la mappa F : M → S2 definita da
F :
xyzt
7→ 1√1 + z2
xyz
.
Chiaramente, F e ben definita e di classe C∞, dal momento che la stessaformula definisce un’estensione F : R4 → R3 di classe C∞.
Dato che S1 × S1 e compatto, F (S1 × S1) e compatto e un sottoinsiemecompatto di uno spazio topologico e chiuso. Quindi, F (M) ⊆ S2 e chiuso.
Se F fosse un diffeomorfismo locale, sarebbe una mappa aperta, quindiF (S1 × S1) ⊆ S2 sarebbe sia aperto che chiuso di S2. Essendo S2 connessocio implicherebbe F (S1 × S1) = S2.
D’altra parte, se p = (x y z t)t ∈ M allora −1 ≤ z ≤ 1; dal momento chela funzione z/
√1 + z2 ha derivata prima 1/(1 + z2)3/2, essa e strettamente
crescente su R e quindi
− 1√2≤ z√
1 + z2≤ 1√
2
73

-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
-0.5
0
0.5
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
Figure 6: f(S1 × S1) per l’esempio ??.
se −1 ≤ z ≤ 1. In definitiva, F (S1 × S1) e contenuto nel luogo di S2 ove− 1√
2≤ z ≤ 1√
2, pertanto F non e suriettiva. In effetti e facile vedere che
F (S1 × S1) =
a
bc
∈ S2 : − 1√2≤ c ≤ 1√
2
.
Quindi F non puo essere un diffeomorfismo locale, ovvero esistono dei punticritici e dei valori singolari di f .
Inoltre, se p ∈ M il differenziale dpM : TpM → TF (p)S2 e dato dalla
restrizione di dpF a TpM ⊆ R4. Ne discende che
ker(dpF ) = ker(dpF ) ∩ TpM.
Ora se scriviamo p ∈M come
p =
(p1p2
)
74

con
p1 =
(xy
), p2 =
(zt
)∈ S1,
allora
TpM ∼= Tp1S1 × Tp2S1
= p⊥1 × p⊥2
= span
{(−yx
)}× span
{(−tz
)}
∼= span
−yx00
,
00−tz
. (18)
D’altra parte, la matrice Jacobiana di F in p e data da
JpF =
1√1+z2
0 − xz(1+z2)3/2
0
0 1√1+z2
− yz(1+z2)3/2
0
0 0 1(1+z2)3/2
0
=
1√1 + z2
1 0 − xz(1+z2)
0
0 1 − yz(1+z2)
0
0 0 1(1+z2)
0
. (19)
Sia v ∈ ker(dpF ) ⊆ TpM ; esistono λ, η ∈ R tali che
v =
−λ yλ x−η tη z
.
75

Ne discende che
0 = dpF (v) = dpF (v)
= JpF v
=
1√1+z2
0 − xz(1+z2)3/2
0
0 1√1+z2
− yz(1+z2)3/2
0
0 0 1(1+z2)3/2
0
v
=1√
1 + z2
1 0 − xz(1+z2)
0
0 1 − yz(1+z2)
0
0 0 1(1+z2)
0
−λ yλ x−η tη z
=
1√1 + z2
−λ y + η xzt(1+z2)
λx+ η yzt(1+z2)
−η t(1+z2)
Supponiamo t 6= 0; l’annullarsi dell’ultima componente impone η = 0, da cuideduciamo facilmente (essendo (x, y) 6= (0, 0)) che λ = 0. Quindi ker(dpF ) =(0) se t 6= 0, ovvero F e un diffeomorfismo locale in ogni p ∈ M con t 6= 0.Se t = 0, d’altra parte, vediamo che v ∈ ker(dpF ) se λ = 0 (e η e arbitrario).Pertanto,
ker(dpF ) = span
0001
.
Quindi, il luogo dei punti critici di F e
Crit(f) =(S1 ×
{(10
)})∪(S1 ×
{(−10
)}).
Il luogo dei valori singolari di f e pertanto
Sing(f) = f
(S1 ×
{(10
)})∪ f
(S1 ×
{(−10
)})
=
x
yz
∈ S2 : z = ± 1√2
,
unione disgiunta di due copie di S1.
Esempio 12.3. Si consideri la mappa, ovviamente C∞,
f : S2 × S2 × R→ R3
76

data daf(p, q, t) = p+ t(q − p) (p, q ∈ S2, t ∈ R).
Se ζ = (p, q, t) ∈ S2 × S2 × R e (v, w, s) ∈ Tζ(S2 × S2 × R) = p⊥ × q⊥ × R,otteniamo
dζf(v, w, s) = (1− t)v + tw + s(p− q).
Supponiamo p = q. Allora chiaramente
dζf(Tζ(S
2 × S2 × R))
= p⊥ R3,
e percio, essendo f(p, p, t) = p per ogni t ∈ R, ogni p ∈ S2 e un valoresingolare di f .
Se invece p 6= q, si ha p − q 6∈ Tp(S2) ∪ Tq(S2) = p⊥ ∪ q⊥ (dimostrare).Ora dζf (Tζ(S
2 × S2 × R)) contiene almeno uno tra p⊥ e q⊥ e inoltre contienep − q. Pertanto se p 6= q allora dζf (Tζ(S
2 × S2 × R)) e tutto R3. Quindi ipunti di S2 sono i soli valori singolari di f .
Esercizio 12.1. Descrivere le immagini inverse f−1(u) al variare di u ∈ R3.
Definizione 12.4. Siano M e N varieta differenziabili, di dimensione m en, rispettivamente. Sia f : M → N un’applicazione C∞. Diremo che f e unasommersione se ogni q ∈ N e un valore regolare, o equivalentemente se f esommersiva in ogni p ∈M .
Esempio 12.4. SianoM ⊆ Rm eN ⊆ Rn varieta differenziabili. SiaM×N ilprodotto. Sia π : M×N →M la proiezione sulla prima componente, (p, q) 7→p. Essendo indotta per restrizione dalla proiezione lineare Π : Rm×Rn → Rm,π e ovviamente C∞. Inoltre,
d(p,q)π : T(p,q)(M ×N) = TpM × TqN −→ TpM
e indotto per restrizione da d(p,q)Π = Π, e quindi d(p,q)π e la proiezione sullaprima componente, (v, w) 7→ v. Quindi π e chiaramente una sommersione.
Teorema 12.3. (Teorema dell’immagine inversa, versione globale.) SianoM , N e f : M → N come sopra. Sia q ∈ N un valore regolare di f . Alloraf−1(q) ⊆ M e una varieta differenziabile di dimensione m − n. Inoltre, perogni p ∈ f−1(q) si ha
Tp(f−1(q)
)= ker (dpf) .
77

Dim. Sia p ∈ f−1(q). Vogliamo dimostrare che esistono un intorno aperto U ′
di p in f−1(q) e un diffeomorfismo φ′ : A′ → U ′, ove A′ ⊆ Rm−n e un aperto.Siano φ : A → U e τ : B → V carte locali per M e N rispettivamente,
con p ∈ U e f(U) ⊆ V . Sia g : U → V la rappresentazione di f nelle carte φe τ .
Se p = φ(a), b = τ(q), si ha b = g(a) e g e sommersiva in a (Osservazione??). Pertanto, per il Teorema della sommersione locale, esistono un intornoaperto C ⊆ g−1(b) di a in g−1(b) e un diffeomorfismo ψ : A′ → C, essendoC ⊆ Rm−n un aperto.
Poiche φ e un diffeomorfismo, U ′ = φ(C) e un intorno aperto di p = φ(a)in φ (g−1(b)) = f−1(q) ∩ U e la composizione φ′ = φ ◦ ψ : A′ → U ′ e undiffeomorfismo.
Sia a′ ∈ A′ con a = ψ(a′) e quindi p = φ′(a′). Si ha
Tp(f−1(q)
)= da′φ
′ (Rm−n) = daφ(da′ψ
(Rm−n
))= daφ (ker(dag)) .
Usando il diagramma commutativo (??), vediamo che questo e proprio ker(dpf).
Esempio 12.5. Consideriamo la mappa f : S2 → R data dalla restrizione aS2 della proiezione π : R3 → R sulla terza componente, come negli esempi?? e ??. Gli unici punti p ∈ S2 in cui dpf : TpS
2 → R si annulla sono ilpolo nord e il polo sud, p± = (0, 0,±1)t. Quindi f induce per restrizione unasommersione g : S2 \ {p+, p−} → R. Se λ ∈ R, |λ| ≥ 1, allora g−1(λ) = ∅. Se−1 < λ < 1, g−1(λ) e il luogo
g−1(λ) =
x
yz
: x2 + y2 = 1− λ2, z = λ
=
√1− λ2 cos(θ)√
1− λ2 sin(θ)λ
: 0 ≤ θ < 2π
Quindi, dim (g−1(λ)) = 1 = 2 − 1. Inoltre, lo spazio tangente a g−1(λ)nel punto pθ,λ = (
√1− λ2 cos(θ),
√1− λ2 sin(θ), λ)t e generato dal vettore
velocita in τ = θ della curva τ 7→ (√
1− λ2 cos(τ),√
1− λ2 sin(τ), λ)t. Per-tanto,
Tpθ,λ(g−1(λ)
)= span
−√1− λ2 sin(θ)√
1− λ2 cos(θ)0
.
E immediato verificare che questo e ker(dpf) = TpS2 ∩ ker(π).
78

Esempio 12.6. Nella situazione dell’esempio ??, per ogni p ∈M abbiamo
π−1(p) = {(p, q) : q ∈ N}.
Quindi, π−1(p) e una varieta differenziabile diffeomorfa a N (q 7→ (p, q),(p, q) 7→ q), e pertanto di dimensione n = (m + n) − m. Inoltre, per ogni(p, q) ∈ π−1(p) si ha
T(p,q)(π−1(p)
)= {(0, w) : w ∈ TqN} = ker
(d(p,q)π
).
Esempio 12.7. Per n ≥ 1 consideriamo la mappa f : Rn \ {0} → Sn−1 datada f(p) = 1
‖p‖p. Sia p ∈ Rn \ {0}, q = f(p) ∈ Sn−1. Sia 0 6= v ∈ Tq(Sn−1
)=
q⊥. Dopo avere diviso v per la sua norma possiamo supporre che ‖v‖ = 1.Sia γ : (−ε, ε) → Sn−1 una curva C∞ soddisfacente γ(0) = q, γ′(0) = v. Adesempio, possiamo prendere
γ(t) = cos(t) q + sin(t) v (t ∈ R).
Consideriamo la curva γ : (−ε, ε)→ Rn \ {0}, data da γ(t) = ‖p‖ · γ(t). Perla scelta precedente, avremmo ad esempio
γ(t) = cos(t) p+ sin(t) ‖p‖v.
Chiaramente, γ = f ◦ γ e quindi v = dpf(γ′(0)
)= dpf
(‖p‖v
). Pertanto, f e
una sommersione. Se q ∈ Sn−1, f−1(q) = R+q, il semiasse positivo generatoda q. Quindi dim f−1(q) = 1 = dimRn − dimSn−1. Inoltre segue facilmentedalle considerazioni precedenti che se p ∈ Rn \ {0}, w ∈ Rn allora
dpf(w) =1
‖p‖
[w −
⟨p
‖p‖, w
⟩p
‖p‖
].
In altri termini, dpf(w) e la componente di w perpendicolare a p, riscalatadi un fattore 1
‖p‖ . In particolare,
ker(dpf) = span{p} (p ∈ Rn \ {0}).
Questo e ovviamente anche
Tp
(f−1
(1
‖p‖p
))= Tp (R+p) .
Possiamo esprimere f globalmente come una proiezione componendola con ildiffeomorfismo
h : R+ × Sn−1 −→ Rn \ {0}, (x, q) 7→ x · q.
Infattif ◦ h((x, q)) = q
((x, q) ∈ R+ × Sn−1
).
79

Esempio 12.8. Sia f : U(n) → S1 l’applicazione determinante. Se A ∈U(n), abbiamo visto che
dAf : TA(U(n)) −→ Tdet(A)S1 = det(A)⊥ = det(A) · iR
e data dadAf(B) = det(A) · tr(A−1B).
Poiche S1 ha dimensione 1, A ∈ U(n) e un punto di sommersivita per f se esolo se dAf 6= 0, ovvero se e solo se esiste B ∈ TA(U(n)) con tr(A−1B) 6= 0.
Abbiamo TIn(U(n)) ={B ∈Mn(C) : B +B
t= 0}
e quindi
B =
i 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
∈ TIn(U(n))
soddisfa dInf(B) = i 6= 0. Se A ∈ U(n) abbiamo visto anche che TA(U(n)) =A · TIn(U(n)). Quindi,
B′ =: AB = A
i 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
∈ TA(U(n))
soddisfa tr(A−1B′) = tr(B) = i 6= 0. Pertanto f e una sommersione e quindif−1(g) ⊆ U(n) e una varieta differenziabile di dimensione n2 − 1 per ognig ∈ S1. In particolare, SU(n) =: f−1(1) si dice il gruppo unitario specialedi ordine n; e ovviamente un sottogruppo di U(n). Il suo spazio tangente inogni A ∈ SU(n) e
TA(SU(n)
)={B ∈Mn(C) : AB
t+BA
t= 0, tr
(AtB)
= 0}.
In particolare, TIn(SU(n)) consiste delle matrici antihermitiane di traccianulla. Ad esempio, SU(2) consiste delle matrici complesse della forma[
x1 + ix2 −(x3 − ix4)x3 + ix4 x1 − ix2
]con xi ∈ R per ogni i e
∑x2i = 1, ed e quindi diffeomorfo a S3.
Avendo stabilito che SU(n) e una varieta differenziabile di dimensionen2 − 1, possiamo esprimere globalmente (e non soltanto localmente, come
80

garantito dal Teorema ??) f come una proiezione (il che e ovviamente moltopiu forte che dire semplicemente che e una sommersione). Siano infatti h :S1 × SU(n) → U(n) e κ : U(n) → S1 × SU(n) le mappe, ben definite eovviamente C∞,
h(λ,[B1, . . . , Bn
])=[λB1, B2, . . . , Bn
],
κ([A1, . . . , An
])=
(det(A),
[1
det(A)A1, A2, . . . , An
]).
E chiaro che h = k−1 e che pertanto h e un diffeomorfismo. La composizionef ′ = f ◦ h : S1 × SU(n)→ S1 e la proiezione sulla prima componente.
Esempio 12.9. Sia f : O(n) → Sn−1 l’applicazione A 7→ A1. AbbiamodAf(B) = B1 per ogni (A,B) ∈ T (O(n)). Quindi A ∈ O(n) e un puntodi sommersivita se e solo se dato qualsiasi C ∈ TA1(Sn−1) = (A1)⊥ esisteB ∈ TA(O(n)) con B1 = C. Ora
TA(O(n)) ={B ∈Mn(R) :
(Bi, Aj
)+(Aj, Bi
)= 0∀ i, j = 1, . . . , n
}.
Dato C ∈ Rn con (C,A1) = 0, poniamo B1 = C e vediamo le n(n−1) entratedi B2, . . . , Bn come incognite, determinando B2, . . . , Bn induttivamente. Im-poniamo su B2 le condizioni{
(B2, A2) = 0(B2, A1) = − (A2, B1) .
Poiche A1 e A2 sono linearmente indipendenti, la matrice dei coefficientidel sistema ha rango 2. Pertanto, l’insieme delle soluzioni B2 ∈ Rn e unsottospazio affine (non vuoto) (n − 2)-dimensionale. Supponiamo che B1 =C,B2 . . . , Br ∈ Rn (1 ≤ r ≤ n − 1) siano state determinate in modo che(Ai, Bj) + (Aj, Bi) = 0 se 1 ≤ i, j ≤ r. Per determinare Br+1 imponiamosull’incognita Br+1 le condizioni{
(Br+1, Ar+1) = 0(Br+1, Ai) = − (Ar+1, Bi) i = 1, . . . , r.
Poiche A1, . . . , Ar+1 sono linearmente indipendenti, la matrice dei coefficientidel sistema ha rango massimo r + 1. Pertanto, lo spazio delle soluzioni e unsottospazio affine non vuoto di dimensione n− (r+1) di Rn. All’n-imo passorisulta determinata B = [C,B2, . . . , Bn] ∈ TA(O(n)). Quindi, poiche dAf esuriettivo per ogni A ∈ O(n), f e una sommersione.
81

Possiamo ottenere lo stesso risultato anche con il seguente argomentogeometrico. Dato C ∈ Rn con (C,A1) = 0, sia γ : (−ε, ε)→ Sn−1 una curvaC∞ con γ(0) = A1, γ′(0) = C. Consideriamo la matrice
A(t) = [γ(t), A2, . . . , An].
Poiche detA(t) e una funzione continua di t e vale ±1 per t = 0 (essendoA(0) = A ortogonale), possiamo supporre - dopo avere eventualmente sosti-tuito ε con ε′ sufficientemente piccolo - che A(t) sia invertibile, e quindi chele colonne di A(t) siano una base di Rn, per ogni t ∈ (−ε, ε).
Applichiamo ora il procedimento di ortonormalizzazione di Grahm-Schmidtalla base {γ(t), A2, . . . , An}; perveniamo a una base ortonormale della forma{γ(t), A2(t), . . . , An(t)}, con Aj(0) = Aj per ogni j. La matrice
A(t) =[γ(t), A2, . . . , An
]e una matrice ortonormale che dipende in modo C∞ da t. Consideriamo allorail cammino γ : (−ε, ε) → O(n) data da γ(t) = A(t). Abbiamo γ(0) = A ef ◦ γ = γ. Se ora poniamo B = γ′(0) ∈ TA
(O(n)
), abbiamo
dAf(B) = dAf(γ′(0)
)= γ′(0) = C.
Quindi per ogni A ∈ O(n) e ogni C ∈ TA1 (Sn−1) abbiamo prodotto B ∈TA(O(n)
)con dAf(B) = C. Pertanto, f e una sommersione.
Si noti che f e una sommersione suriettiva: in effetti, dato un qualsiasiX ∈ Sn−1 estendiamo X a una base di Rn; applicando Grahm-Schmidt,ricaviamo una base ortonormale di Rn il cui primo elemento e X. La matriceavente per colonne gli elementi di questa base e una matrice ortogonale Atale che f(A) = X.
Siano e1, . . . , en i vettori della base standard di Rn. Si ha chiaramente
f−1(e1) =
1 0 · · · 00 a11 · · · a1,n−1...
.... . .
...0 an−1,1 · · · an−1,n−1
:
a11 · · · a1,n−1...
. . ....
an−1,1 · · · an−1,n−1
∈ O(n− 1)
.
Quindi, f−1(e1) e diffeomorfo a O(n − 1). Allo stesso modo, si vede chedato X ∈ Sn−1 arbitrario e A ∈ O(n) con prima colonna X, ovvero tale cheX = Ae1, si ha
f−1(X) ={AB : B ∈ f−1(e1)
},
82

e pertanto ogni fibra di f e diffeomorfa a O(n− 1). Si osservi che
dimO(n−1) =1
2(n−1)(n−2) =
1
2n(n−1)−(n−1) = dimO(n)−dim(Sn−1),
come predetto dal teorema.Verifichiamo esplicitamente che f e localmente una proiezione; questo
segue dal fatto che f e una sommersione, in virtu del Teorema dell’immagineinversa. Verificandolo esplicitamente, d’altra parte, ridimostriamo geometri-camente che f e una sommersione.
Affermo che per ogni A ∈ O(n) esistono aperti U ⊆ O(n) e V ⊆ Sn−1 conA ∈ U e un diffeomorfismo φ : V ×O(n− 1)→ U tale che f ◦ φ(X,B) = Xper ogni (X,B) ∈ V ×O(n− 1).
Per vederlo, consideriamo l’aperto di Sn−1:
V1 ={
(x1, . . . , xn)t ∈ Sn−1 : x1 > 0}.
Se (x1, . . . , xn)t ∈ V0 e B = [bij] ∈ O(n− 1), la matrice
A(X,B) =
x1 0 · · · 0x2 b11 · · · b1n...
.... . .
...xn bn−1,1 · · · bn−1,n−1
e invertibile (con determinante x1 · det(B) 6= 0). Pertanto applicando ilprocesso di ortonormalizzazione di Grahm-Schmidt alle colonne di A(X,B)perveniamo a una ben definita matrice ortogonale α(X,B) ∈ O(n).
L’applicazione α : V1 × O(n − 1) → O(n) e ovviamente C∞ (poiche talisono tutte le operazioni utilizzate nell’algoritmo di Grahm-Schmidt). Inoltre,la composizione f ◦ α porta (X,B) in X. Vogliamo dimostrare che α, even-tualmente sostituendo V1 con un intorno aperto V ⊆ V1 di e1 = (1, 0, . . . , 0)t,induce un diffeomorfismo di V ×O(n− 1) con un aperto U ⊆ O(n).
Consideriamo a tale scopo l’applicazione parziale
αe1 : O(n− 1) −→ O(n), B 7→ α(e1, B) = A(e1, B),
ove e1 = (1, 0, . . . , 0)t. αe1 e chiaramente C∞ e induce una corrispondenzabiunivoca re1 : O(n − 1) → f−1(e1); l’inversa re1 : f−1(e1) → O(n − 1) eindotta dalla restrizione della mappa A ∈ Mn(R) 7→ A[11] ∈ Mn−1(R), oveA[ij] e la matrice ottenuta da A cancellando la i-ma riga e la j-ma colonna.Pertanto, r−1e1 e C∞, e quindi re1 e un diffeomorfismo. Come vedremo inseguito, questo implica che rX : O(n − 1) → f−1(X), X 7→ α(X,B), eun diffeomorfismo per X ∈ V ′, ove V ′ ⊆ V1 ⊆ Sn−1 e un intorno di e1
83

abbastanza piccolo. In particolare, la restrizione di α a V ′×O(n−1) e quantomeno un’applicazione C∞ e biunivoca. Infatti, se α(X,B) = α(X ′, B′) con(X,B), (X ′, B′) ∈ V ′ ×O(n− 1), abbiamo innanzitutto
X = f ◦ α(X,B) = f ◦ α(X ′, B′) = X ′
e quindi anche
B = r−1X(α(X,B)
)= r−1X′
(α(X ′, B′)
)= B′.
Per dimostrare che α e un diffeomorfismo, basta allora dimostrare che il suodifferenziale e invertibile in ogni (X,B) ∈ V ′×O(n− 1). Abbiamo visto cheα mappa {X} × O(n − 1) diffemorficamente su f−1(X), per ogni X ∈ V ′.Quindi, data la decomposizione in somma diretta
T(X,B)
(V ×O(n− 1)
) ∼= TXSn−1 × TBO(n− 1),
il differenziale d(X,B)α mappa il sottospazio
TB(O(n− 1)
)⊆ T(X,B)
(V ×O(n− 1)
)isomorficamente su
Tα(X,B)
(f−1(X)
)= ker
(dα(X,B)f
).
D’altra parte, poiche f ◦ α e la proiezione sul primo fattore, il sottospazio
TXSn−1 ⊆ T(X,B)
(V ×O(n− 1)
)si mappa isomorficamente su se stesso mediante d(X,B)(f ◦ α) = dα(X,B)f ◦d(X,B)α. Pertanto,
{0} = d(X,B)α(TXS
n−1) ∩ ker(dα(X,B)f
)= d(X,B)α
(TXS
n−1) ∩ d(X,B)α(TB(O(n− 1)
),
e da cio segue facilmente l’asserto.Quindi, abbiamo trovato un intorno aperto V ⊆ Sn−1 di e1 e un diffeo-
morfismoα : V ×O(n− 1)→ f−1(V )
tale che f ◦ α e la proiezione sul primo fattore. Vogliamo ora dimostrareche per ogni X ∈ Sn−1 esistono un intorno aperto VX ⊆ Sn−1 di X e undiffeomorfismo
β : VX ×O(n− 1)→ f−1(VX)
84

tali che f ◦ β e la proiezione sul primo fattore.Scegliamo a tal fine A ∈ O(n) tale che Ae1 = X e poniamo
VX = A · V = {AX ′ : X ′ ∈ V }.
Definiamo poi β : VX ×O(n− 1)→ O(n) ponendo
β(AX ′, B) = Aα(X ′, B).
Lasciamo al lettore la verifica dei dettagli.
12.1 La connessione di alcuni gruppi di matrici
Consideriamo ora il seguente problema: quali dei gruppi di matrici GL(n,R),SL(n,R), O(n), SO(n), GL(n,C), U(n), SU(n) sono connessi?
Innanzitutto, e immediato riconoscere la non-connessione di GL(n,R) eO(n). Difatti l’applicazione determinante e continua e suriettiva
det|GL(n,R) : GL(n,R)→ R \ {0} = (−∞, 0) ∪ (0,+∞).
D’altra parte e ovvio che se f : X → Y e un applicazione continua e suriettivae lo spazio topologico X e connesso allora anche Y e connesso (se Z ⊆ Yfosse non vuoto, aperto e chiuso, per la suriettivita e la continuita di f anchef−1(Z) sarebbe non vuoto, aperto e chiuso). Quindi, dato che R \ {0} non econnesso, tale non puo essere nemmeno GL(n,R).
Il caso di O(n) e simile; basta sostiutire R\{0} nelle considerazioni prece-denti con {±1}.
Affermo invece che SO(n) e connesso per ogni n ≥ 1. Ricordiamo che
SO(n) ={A ∈ O(n) : det(A) = 1
}.
Procederemo per induzione.Innanzitutto, SO(1) = {1} e SO(2) ∼= S1 sono entrambi connessi. Sup-
poniamo di aver dimostrato che SO(k) e connesso per ogni k ≤ n − 1 conn ≥ 2 e dimostriamo che anche SO(n) e connesso.
Come visto, la mappa f : SO(n)→ Sn−1 data da f(A) = A1 = Ae1 (ovegli ej sono i vettori della base standard) e un’applicazione C∞ sommersiva esuriettiva.
Per la precisione, abbiamo esaminato la mappa definita dalla stessa formafunzionale ma con dominio O(n), dimostrando che quest’ultima e una som-mersione suriettiva. D’altra parte, essendo SO(n) aperto in O(n), ne segueche anche la sua restrizione a SO(n) e una sommersione. Inoltre, dato cheper ogni v ∈ Sn−1 possiamo trovare una matrice ortogonale A ∈ O(n) con
85

prima colonna uguale ad v, possiamo anche trovare B ∈ SO(n) con primacolonna uguale ad v. Se infatti A = [vA2 · · · An] non e essa stessa in SO(n),bastera sostituirla con B = [v (−A2)A3 · · · An] (si ricordi che n ≥ 2).
In particolare, f e aperta e suriettiva. Dato che Sn−1 e connesso per ognin ≥ 2, in virtu della Proposizione ?? per concludere che SO(n) e connessobasta dimostrare che ogni fibra f−1(v) di f e connessa, ed e qui che intervienel’ipotesi di induzione.
Innanzitutto, notiamo che se v ∈ Sn−1 e se B ∈ f−1(v) e dato allora
A ∈ f−1(v) ⇔ A1 = v = B1
⇔ Ae1 = B e1
⇔ B−1Ae1 = e1
⇔ B−1A ∈ f−1(e1)⇔ A ∈ B f−1(e1).
Pertanto,f−1(v) = B f−1(e1).
Chiaramente, la moltiplicazione a sinistra per B, LB(X) = BX, induceallora un diffeomorfismo f−1(e1) → f−1(v), con diffeomorfismo inverso lamoltiplicazione a sinistra per B−1. Quindi tutte le fibre f−1(v), al variare div ∈ Sn−1, sono diffeomorfe a f−1(e1). Ci siamo cosı ridotti a dimostrare chef−1(e1) e connesso.
D’altra parte abbiamo (esercizio)
f−1(e1)
=
1 0 · · · 00 a11 · · · a1n−1...
.... . .
...0 an−1 1 · · · an−1n−1
:
a11 · · · a1n−1...
. . ....
an−1 1 · · · an−1n−1
∈ SO(n− 1)
.
Non e difficile capire a questo punto che che f−1(e1) e diffeomorfo a SO(n−1),che per ipotesi di induzione e connesso. Cio completa la dimostrazione dellaconnessione di SO(n) ∀ n ≥ 1.
Esercizio 12.2. Si dimostri che U(n) e SU(n) sono connessi per ogni n ≥ 1.
13 Punti di Immersivita; Immersioni.
Definizione 13.1. Sia f : M → N un’applicazione C∞ tra varieta differen-ziabili. Un punto p ∈ M si dice di immersivita per f , o equivalentemente f
86

Figure 7: La figura Otto
si dice immersiva in p, se il differenziale dpf : TpM → Tf(p)N e iniettivo. fsi dice un’immersione se e immersiva in ogni p ∈M .
Esempio 13.1. Siano M, N ⊆ Rk varieta differenziabili con M ⊆ N .Diremo allora che M e una sottovarieta di N . L’inclusione di M in N ,ι : M → N , e indotta per restrizione dalla mappa identita di Rk ed e per-tanto una mappa C∞. Per ogni p ∈ M , il differenziale dpι : TpM → TpNe indotto dal differenziale dell’identita, che e l’dentita stessa. Quindi dpι esemplicemente l’inclusione di TpM in TpN . Chiaramente, ι e un’immersione(l’esempio piu ovvio).
Esempio 13.2. Diamo un esempio di immersione non iniettiva, con do-minio compatto (Fig.??). Consideriamo la mappa f : S1 → R2 data dallarestrizione a S1 della mappa F : R2 → R2 cosi’ descritta:
F
((xy
))=
(xxy
).
Allora f e un’immersione. Per vederlo, consideriamo la matrice Jacobiana diF nel generico punto di p = (x, y)t ∈ R2:
Jp(F ) =
[1 0y x
].
Tale matrice ha rango 2 se x 6= 0, rango 1 se x = 0. Quindi F non eun’immersione. Tuttavia, per ogni p = (x, y)t ∈ S1 abbiamo
dpF
((−yx
))=
[1 0y x
](
(−yx
)=
(−y
−y2 + x2
).
Quindi, dpF e iniettivo sullo spazio tangente TpS1. Percio f e un’immersione
- anche se F non lo e. Inoltre, f((0, 1)t) = f((0,−1)t) e quindi f non einiettiva. D’altra parte f e iniettiva sul complementare di (0,−1)t.
Proposizione 13.1. Siano M,N,P varieta differenziabili, f : M → N eg : N → P applicazioni C∞. Se f e g sono immersioni, tale e anche lacomposizione g ◦ f : M → P .
87

Figure 8: g(S2) per l’esempio ??.
Dim. Se p ∈M , il differenziale dp(g ◦ f) : TpM → Tg◦f(p)P e la composizionedf(p)g ◦ dpf , in virtu della regola della catena. L’asserto segue dal fattoche la composizione di applicazioni lineari iniettive e un’applicazione lineareiniettiva.
Esempio 13.3. Consideriamo la mappa κ : (−π/2, 3π/2)→ R2 data da
κ(s) =
(cos(s)
cos(s) sin(t)
).
Allora κ = f ◦ φ, essendo φ : (−π/2, 3π/2) → S1 la carta (cos(s), sin(s))t.Quindi κ e un’immersione, poiche tali sono sia f che φ, ed e iniettiva, dalmomento che (0,−1)t non appartiene all’immagine di φ. D’altra parte,l’immagine di κ e tutta la figura otto della Fig. ??. Abbiamo quindiun’esempio di immersione iniettiva la cui immagine non e una sottovarietadel dominio.
Esempio 13.4. Consideriamo la mappa g : S2 → R3 data dalla restrizionea S2 della mappa G : R3 → R3 cosi’ descritta:
G
xyz
=
xxyxz
.
La matrice Jacobiana di F nel generico punto di p = (x, y, z)t ∈ R3 e
Jp(F ) =
1 0 0y x 0z 0 x
.Tale matrice ha rango 3 se x 6= 0, rango 1 se x = 0. Quindi F non eun’immersione, ne tale puo essere f , dal momento che S2 contiene punticon x = 0 nei quali il differenziale dpf non puo essere iniettivo. Inoltre,f((0, cos(s), sin(s))t) = 0 per ogni s ∈ R, ovvero f schiaccia l’equatore x = 0nell’origine (Fig. ??).
Esercizio 13.1. Dimostrare che il rango di dpf e 1 quando x = 0 (non bastaguardare la matrice Jacobiana qui sopra!).
88

Figure 9: f(S2) per l’Esempio ??.
Esempio 13.5. Consideriamo la mappa h : S2 → R3 data dalla restrizionea S2 della mappa G : R3 → R3 cosi’ descritta:
G
xyz
=
xxyz
.
La matrice Jacobiana di G nel generico punto di p = (x, y, z)t ∈ R3 e
Jp(G) =
1 0 0y x 00 0 1
.Tale matrice ha rango 3 se x 6= 0, rango 2 se x = 0. Quindi G non eun’immersione, ma per vedere se g lo e dobbiamo considerare esplicitamentela restrizione di dpG a TpS
2 nei punti p ∈ S2 con x = 0. Se p = (0, y, z)t ∈ S2
abbiamo
Tp(S2) = span
1
00
,
0−zy
.
Otteniamo
dpG
100
=
1 0 0y 0 00 0 1
100
=
1y0
,
dpG
0−zy
=
1 0 0y 0 00 0 1
0−zy
=
00y
.
Dal momento che la matrice 1 0y 00 y
89

Figure 10: El toro - ole!
ha rango due se y 6= 0, uno se y = 0, concludiamo cheG e immersiva ove y 6= 0o x 6= 0, non e immersiva in (0, 0,±1)t. Si ha f((0, y, z)t) = f((0,−y, z)t)per ogni y, z. Quindi f non e iniettiva, e l’equatore x = 0 viene schiacciatonel segmento [(0, 0,−1)t, (0, 0, 1)t] (Fig. ??).
Teorema 13.1. Sia f : M → N un’applicazione C∞ di varieta differenziabili.Supponiamo che f sia immersiva in p ∈ M . Allora esistono carte localiφ : A → U per M nell’intorno di p, e τ : B → V per N nell’intornodi f(p), tali che f(U) ⊆ V e la corrispondente rappresentazione locale dif e la funzione g : A ⊆ Rm → B ⊆ Rm × Rn−m indotta dalla mappa(x1, . . . , xm)t 7→ (x1, . . . , xm, 0, . . . , 0)t.
Esempio 13.6. Vediamo ora un esempio di immersione iniettiva la cui im-magine e una sottovarieta del dominio. Consideriamo il cerchio di centro(0, 3, 0)t e raggio 1 nel piano yz in R3 e ruotiamolo attorno all’asse z finoa fargli fare un giro completo. La superficie T ⊆ R3 spazzata dal cerchioe una ciambella e matematicamente si dice un toro (Fig. ??). Il cerchioe parametrizzato dalla mappa f : S1 → R3 data da f(ϑ) = (0, cos(ϑ) +3, sin(ϑ))t (ϑ ∈ [0, 2π]). Ruotare di un angolo θ attorno all’asse z equivalealla moltiplicazione per la matrice ortogonale cos(θ) − sin(θ) 0
sin(θ) cos(θ) 00 0 1
.
Quindi, il toro T e l’immagine della mappa g : S1 × S1 → R3 data da
g
((cos(θ)sin(θ)
),
(cos(ϑ)sin(ϑ)
))=
cos(θ) − sin(θ) 0sin(θ) cos(θ) 0
0 0 1
0cos(ϑ) + 3
sin(ϑ)
=
− sin(θ)[cos(ϑ) + 3]cos(θ)[cos(ϑ) + 3]
sin(ϑ)
.
Esercizio 13.2. Dimostrare che f e un’immersione iniettiva e propria diS1 × S1 in R3, e quindi che l’immagine e una sottovarieta differenziabilebidimensionale di R3, difeomorfa a S1 × S1.
90

Figure 11: f(S2) per l’esempio ??.
Esempio 13.7. Consideriamo, come ulteriore esempio, la mappa f : S2 →R3 ottenuta per restrizione della mappa F : R3 → R3 data da
F
xyz
=
x2
y2
z2
.
La matrice Jacobiana di F in p = (x, y, z)t e data da
Jp(F ) =
2x 0 00 2y 00 0 2z
.Pertanto F e un diffeomorpfismo locale sul luogo ove xyz 6= 0, non e immer-siva sul luogo ove xyz = 0, cioe sull’uione dei piani coordinati. Poiche dpfe la restrizione di dpF a Tp(S
2) ⊆ R3, f stessa e immersiva in ogni p ∈ S2
che non giace su alcun equatore. Per determinare il comportamento lungogli equatori, supponiamo ad esempio x = 0. Allora se p = (0, y, z)t ∈ S2
calcoliamo:
dpF
100
=
000
, dpF
0−zy
=
0−zyzy
.
Pertanto, f non e immersiva in nessun punto dell’equatore x = 0; lo stessovale chiaramente per gli altri equatori. Inoltre, dpf ha rango 1 in ogni puntodegli equatori con zy 6= 0, o zx 6= 0, o xy 6= 0, ossia nei punti della sfera chegiacciono su qualche equatore ma non su un asse coordinato, mentre ha rango0 in ogni punto della sfera che giace su asse coordinato. La Figura ?? mostral’immagine di f : si tratta di un triangolo equilatero nel piano x+y+z = 1, piuprecisamente del simplesso con vertici nei punti (1, 0, 0)t, (0, 1, 0)t, (0, 0, 1)t.Gli equatori vengono mappati nei lati del triangolo, i sei poli della sferavengono mappati nei vertici.
Esempio 13.8. Un esempio interessante di sottovarieta di R3 e dato dallastriscia di Mobius. Consideriamo il segmento [−1, 1] × {0} nel piano yz.Quando gli applichiamo una rotazione di un angolo θ, con 0 ≤ θ ≤ π, ilsegmento spazza il disco unitario centrato nell’origine. Consideriamo ora lasuccessione di queste operazioni: ruotiamo il segmento di un angolo θ attorno
91

Figure 12: Il nastro di Mobius
all’origine nel piano yz, trasliamolo di 3 unita nella direzione y positiva,ruotiamolo di un angolo 2θ attorno all’asse z, con 0 ≤ θ ≤ π. Il risultato el’immagine della mappa
g : [0, π]× (−1, 1)→ R3
data da
g(θ, t) =
cos(2θ) − sin(2θ) 0sin(2θ) cos(2θ) 0
0 0 1
0t cos(θ) + 3t sin(θ)
=
− sin(2θ)(t cos(θ) + 3)cos(2θ)(t cos(θ) + 3)
t sin(θ)
.
Esercizio 13.3. Si usi la forma analitica di g per produrre un atlante per ilnastro di Mobius e dimostrare che e una varieta differenziabile bidimensionaledi R3.
92




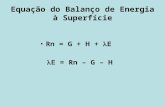

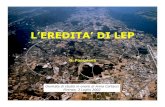


![RandomSamplingversusMetropolisSampling(1) · PDF fileConfigurational-BiasMonteCarlo ... drN exp −βU(rN) F(N,V,T) ... [18] ChainMolecules Configurational-BiasMonteCarlo ThijsJ.H.Vlugt](https://static.fdocument.org/doc/165x107/5a9a9fe37f8b9a9c5b8dcf2a/randomsamplingversusmetropolissampling1-gurational-biasmontecarlo-drn.jpg)