MOTOR ECCENTRIC SPRING BEAM DASHPOT SPEEDehrgott/EXP7.pdf · Vibration results when there is an...
13
Click here to load reader
-
Upload
hoanghuong -
Category
Documents
-
view
212 -
download
0
Transcript of MOTOR ECCENTRIC SPRING BEAM DASHPOT SPEEDehrgott/EXP7.pdf · Vibration results when there is an...


R. Ehrgott 2/13 03/01/01
I. OBJECTIVES
1.1 To determine the undamped and damped natural frequency of asingle degree of freedom system.
1.2 To obtain a plot of the magnification factor versus the frequency ratio.
1.3 To determine the damping ratio ζζζζ and the damping coefficient C ofthe system.
II. BACKGROUND
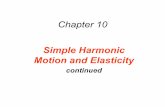
Any mechanical system that has mass and stiffness can vibrate. Vibrationresults when there is an energy exchange between the mass, which storeskinetic energy and the spring, which stores potential energy. In such asystem, the mass will oscillate with periodic motion. The energy loss in avibrating system is modeled as a dashpot or viscous damper. The dashpotis comprised of a cylinder filled with a viscous fluid, such as oil and apiston. The force produced by a dashpot Fd is proportional to the velocityof the mass. The constant of proportionality is the viscous dampingconstant C which has units of N-s/m or Lb-s/in.
For a damped system, the ratio of thedamping constant C to the critical dampingvalue is a dimensionless parameter whichrepresents a meaningful measure of theamount of damping present. This damping
ratio is called ζζζζ (zeta). For oscillations to
occur, ζζζζ must be less than one.
Differential equation:
Circular natural frequency:
Critical damping value:
Damping ratio:
Figure 1Single Degree of Freedom System
)t(FKxxCxM ====++++++++ &&&
nc M2C ωωωω====
M
Kn ====ωωωω
nc M2/CC/C ωωωω========ζζζζ
M
KxFs ==== xCFd &====
)t(x
F(t)

R. Ehrgott 3/13 03/01/01
More complicated mechanical systems can be modeled using the samedifferential equation theory. The system considered for study here is aviscously damped single degree of freedom system which is excited byand external harmonic force.
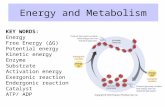
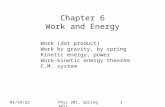
Figure 2EXPERIMENTAL SET-UP
The rigid bar OA shown in Figure 3 pivots about point O when subjected tothe harmonic force. This harmonic force is produced by a rotating mass Medriven by a motor.
DASHPOT
BEAMPIVOT
SPEEDCONTROL
SPRINGMOTOR ECCENTRICROTATING
MASS

R. Ehrgott 4/13 03/01/01
List of Symbols
Lm = Length from the pinned support to the center of the motor (inches)
Ls = Length to the spring (inches)
Ld = Length to the dashpot (inches)
LB = Total length of the beam (inches)
Mm = Total mass of the motor unit, disks and added weights (lb-s2/in)
Me = Eccentric rotating mass (lb-s2/in)
Md = Mass of the dashpot (part attached to the beam) (lb-s2/in)
MB = Mass of the beam (lb-s2/in)
K = Spring constant (lb/in)
C = Viscous damping constant (lb-s/in)
Cc = Critical damping value 2Mωωωωn = 2Ioωωωωn/Ld2
ζ = Damping ratio = C/Cc
r = Radius of the eccentric mass (inches)
θθθθ = Angle of the beam rotation (radians)
ωωωωn = Circular natural frequency (rad/s)
ωωωωf = Circular forcing frequency (rad/s)
fn = Natural frequency (cps or Hz)
Io = Total mass moment of inertia about point O (lb-s2-in)
IB = Mass moment of inertia of the beam about point O (lb-s2-in)
Id = Mass moment of inertia of the damper about O (lb-s2-in)
Im = Mass moment of inertia of the motor unit about O (lb-s2-in)
X = Displacement amplitude as a function of time
Xd = Displacement amplitude at the end of the rigid bar (inches)
Xn = Displacement amplitude at the end of the rigid bar at ωωωωn (inches)
Xst = Equivalent static deflection at the end of the rigid bar (inches)
ββββ = Frequency ratio ωωωωf/ωωωωn

R. Ehrgott 5/13 03/01/01
Derivation of Differential Equation and Natural Frequency
A free body diagram of the rigid bar, pivoting about point o, is shownbelow:
Figure 3Free Body Diagram of System
Where the deflection of the spring x = Ls θθθθ
And the velocity of the dashpot is
By summing moments about point o, the following equation is obtained:
7.1
The total mass moment of inertia of the system about point o can bedetermined from the following mass inertia terms
Io = IB + Im + Id 7.2
Where the beam, motor and dashpot inertia can be defined by:
IB = 1/3 MBLB2
Im = MmLm2
Id = MdLd2
θθθθ==== &dd Lv
)tsin(LrMCLKL
L)tsin(rM(L)CL(L)KL(M
fm2
fe2
d2
s
mf2
feddsso
ωωωωωωωω++++θθθθ−−−−θθθθ−−−−====
ωωωωωωωω++++θθθθ−−−−θθθθ−−−−====∑∑∑∑
&
&
Ld
Ls
Lm
Fd = cvd
Fs = Kx
F(t) = Meωωωωf2 sin(ωωωωf t)
θθθθοοοοA
Xd

R. Ehrgott 6/13 03/01/01
Using Newton’s second law, ΣΣΣΣMo = Ioαααα, the differential equation of motioncan now be written in terms of θθθθ(t):
7.3
Equation (7.3) has the same form as the differential equation in Figure 1and the circular natural frequency can be calculated from:
7.4
Where K is to be determined experimentally using F = Kx and
Mb = 0.0217 lb-s2/inMm = 0.0447 lb-s2/inMd = 4.534 x 10-3 lb-s2/in
The lengths Lb, Lm and Ld are determined from measurement.
Magnification Factor (MF) and the Damping Coefficient (C)
The solution to the differential equation 7.3 is a combination of thecomplementary and particular solution. With time, the transient solutiondies out and we are left with the steady state solution. The amplitude of thesteady state solution has the form:
7.5
The displacement amplitude Xd at end A of the rigid bar (see Figure 2) is:
7.6
Dividing the numerator and denominator by Io
)tsin(LrMKLCL
)tsin(LrMCLKL
fm2
fe2
s2
do
ofm2
fe2
d2
s
ωωωωωωωω====θθθθ++++θθθθ++++θθθθΙΙΙΙ
θθθθΙΙΙΙ====ωωωωωωωω++++θθθθ−−−−θθθθ−−−−
&&&
&&&
o
2s
nKL
ΙΙΙΙ====ωωωω
2f
2d
22fo
2s
2fem
)CL()KL(
rML
ωωωω++++ωωωωΙΙΙΙ−−−−
ωωωω====θθθθ
2f
2d
22fo
2s
2feBm
B)CL()KL(
rMLLLXd
ωωωω++++ωωωωΙΙΙΙ−−−−
ωωωω====θθθθ====

R. Ehrgott 7/13 03/01/01
7.7
Since:
Substitution gives:
Dividing the numerator and denominator by ωωωωn2
This equation can be put in nondimensional form by dividing both sides by
7.8
2f
o
2d22
fo
2s
2f
o
eBm
d
)CL
()KL
(
rMLL
X
ωωωωΙΙΙΙ
++++ωωωω−−−−ΙΙΙΙ
ωωωωΙΙΙΙ====
o
2s
nKL
ΙΙΙΙ====ωωωω
noc 2
CC/C
ωωωωΙΙΙΙ========ζζζζ
no
2d 2
CLζωζωζωζω====
ΙΙΙΙ
2fn
22f
2n
2f
o
eBm
d)2()(
rMLL
Xωωωωςωςωςωςω++++ωωωω−−−−ωωωω
ωωωωΙΙΙΙ====
2
n
f22
n
f
2
n
f
o
eBm
d
)2())(1(
)(rMLL
X
ωωωωωωωωςςςς++++
ωωωωωωωω−−−−
ωωωωωωωω
ΙΙΙΙ====
2
n
f22
n
f
2
n
f
d
eBm
o
)2())(1(
)(
r
X
MLLMF
ωωωωωωωωςςςς++++
ωωωωωωωω−−−−
ωωωωωωωω
====ΙΙΙΙ====
rMLL eBm
oΙΙΙΙ

R. Ehrgott 8/13 03/01/01
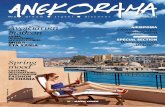
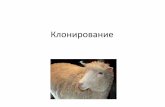
Plotting the right hand side of Equation 7.8 versus the frequency ratioββββ = ωωωωf/ωωωωn, the following plot is obtained for different damping ratios.
Figure 4Magnification factor versus the frequency ratio. Large amplification occurs
when the forcing frequency ωωωωf is near the natural frequency ωωωωn
0
0.5
1
1.5
2
2.5
3
3.5
4
0 1 2 3 4
zeta = 0
zeta = 0.15
zeta = 0.2
zeta = 0.5
zeta = 1r
X
MLLMF d
eBm
oΙΙΙΙ====
)(n
f
ωωωωωωωω====ββββ

R. Ehrgott 9/13 03/01/01
Bandwidth Method for Determining the Damping Present
The damping ratio ζζζζ of the system can be determined from theexperimental Magnification Factor plot using the bandwidth method:
1. Plot the data obtained in Table III to obtain the MF vs ββββ plot as shownabove
2. Determine the maximum MF value. For this example MFmax = 3.333. Draw a horizontal line at 0.707x MFmax = 2.364. Identify the frequency ratios at the intersection of this line (step 3) and
the MF plot. In this example the frequency ratios are ββββ1 = 0.9 and ββββ2 =1.25
5. The damping ratio can be determined from:
7.912
12
ββββ++++ββββββββ−−−−ββββ====ζζζζ
0.90
3.33
1.250
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2
r
X
MLLMF d
eBm
oΙΙΙΙ====
)(n
f
ωωωωωωωω====ββββ
0.707x3.33=2.36
163.09.025.1
9.025.1 ====++++−−−−====ζζζζ

R. Ehrgott 10/13 03/01/01
A second method, called the resonant amplitude method, can be used as acheck. At resonance, when ωωωωf = ωωωωn, the damping ratio can be found from:
7.10
For this example
Finally, the damping coefficient C can be calculated from:
7.11
III. EQUIPMENT
Universal Vibration Apparatus. Scale
IV. PROCEDURE
4.1 Measure the beam length LB and the distances LM, LS, and Ld
4.2 Calculate K using F = Kx4.3 Measure the eccentric distance r and record the eccentric rotating
mass Me (the value of the mass is stamped on the mass disk)4.4 Calculate IB , Im , Id and Io
4.5 Calculate the circular natural frequency ωωωωn using Equation (7.4).4.6 Record the displacement Xd for different motor speeds (RPM) in
Table III4.7 Calculate MF and ωωωωf/ωωωωn and plot them.4.8 Estimate the damping ratio ζζζζ using the bandwidth method and the
maximum resonant amplitude method.4.9 Calculate the damping constant C from Equation 7.9
maxMF2
1====ζζζζ
15.0)33.3(2
1 ========ζζζζ
2d
no
L
2C
ζωζωζωζωΙΙΙΙ====

R. Ehrgott 11/13 03/01/01
REPORT
The Results section should include:
• The calculated and the experimentally determined naturalfrequency.
• The plot of the MF vs ωωωωf/ωωωωn
• The value calculated for ζζζζ for the two methods described.• The value calculated for C (Equation 7.9)• Using ζζζζ, calculate the damped natural frequency using the
equation:
Discuss the results and draw appropriate conclusions.
SELECTED REFERENCES
Vierck, R.K., Vibration Analysis, 2nd ed. Harper and Row, 1979
2nd 1 ζζζζ−−−−ωωωω====ωωωω

R. Ehrgott 12/13 03/01/01
TABLE IMEASUREMENTS AND CALCULATIONS
COMPONENT MASS (lb-s2/in) LENGTH (in) CALCULATIONBEAM Mb = Lb= Ib =
MOTOR Mm = Lm= Im =DASHPOT Md = Ld = Id =
ROTATING MASS Me = r =STIFFNESS (lb/in) Io =
SPRING K = Ls = K Ls2 =
ωωωωn =
TABLE IIZETA AND DAMPING CONSTANTS CALCULATIONS
ζζζζ USING EQ 7.9 ζ = ζζζζ USING EQ 7.10 ζ =% DIFFERENCEDAMPING CONSTANT C =
o
2s
nKL
ΙΙΙΙ====ωωωω

R. Ehrgott 13/13 03/01/01
TABLE IIIEXPERIMENTAL RESULTS AND CALCULATIONS
DATAPOINT
RPM ωωωωf (rad/s) Xd (in) ββββ = ωωωωf/ωωωωn MF =(XdIo)/(rLmLbMe)
123456789101112131415161718192021222324252627282930