Méthodes de décomposition - Accueilferland/ift6504/contenu_cours/Restriction_DW/... · Overview...
117
Méthodes de décomposition
Transcript of Méthodes de décomposition - Accueilferland/ift6504/contenu_cours/Restriction_DW/... · Overview...

Méthodes de décomposition

Overview of the main decompositionmethods used
– To solve large scale problem
– To take advantage of structures
embedded in the problem

Problem types
Min f (x)
Subject to
x ε X1
x ε X2
X1: nice constraints
X2: annoying constraints
Column generation(Dantzig – Wolfe Decomposition)
Lagrangean relaxation
Min f (x, y)
Subject to
F (x, y) ≤ 0
x ε X, y ε Y
x : nice variables
y : annoying variables
Constraint generation
(Benders Decomposition)

( )&
Décomposition de Dantzig-Wolfegénération de colonnes
Stratégie de restriction

Problèmes linéaires

Problème
( )1
2
2
1 : contraintes faciles
MinSujet à
: contraintes contrarian
tes
x X
x X
x X
x
f x
X∈
∈
∈
∈
T MinSujet à
0
Ax b
x
x
Ex
c
b=≥
=
contraintes facilescontraintes contrariantes

Problème équivalent
TProblème ( ) MinSujet à
0Ex
Pc
x
Ax bx
b=≥
= { }
{ }1
Notation:
.
L'ensemble des points extrêmes de
= : , 0
:, , .k
x x
x Ex b xΓ = ≥
Γ…
1
1
Sous l'hypothèse que est borné (i.e., est un polyhèdre)
où
1
0, 1, ,
ki
ii
k
ii
i
x x
x
i k
λ
λ
λ
=
=
ΓΓ
= ∑
∈Γ ⇔ =∑ ≥ =
…
( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
•
•
•
•
•
•1x
2x
3x
4x
5x
6x
x

Approche de résolution
Résoudre une suite de du problème ( ) en fixantà 0 la valeur des variables associées aux points extrêmes qui n'ont pas en
re
core été génér
strictions
és.
i
i
EPxλ
{ }{ }Notation:
: 1, , tel que est déjà généré .
Dans le problème restreint, =0 .
i
i
G i i k x
i G λ
= ∈
∉ ⇒
…

{ }{ }Notation:
: 1, , tel que est déjà généré .
Dans le problème restreint, =0 .
i
i
G i i k x
i G λ
= ∈
∉ ⇒
…
( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
1
1
1
Problème restreint
Min
Sujet à
1
0,0,
Gk
i
iik
i
ii
k
ii
i
i
REP
c x
Ax b
i Gi G
λ
λ
λ
λλ
=
=
=
∑
=∑
=∑
≥ ∈= ∉

( )T
1
1
1
Problème restreint
Min
Sujet à
1
0,0,
Gk
i
iik
i
ii
k
ii
i
i
REP
c x
Ax b
i Gi G
λ
λ
λ
λλ
=
=
=
∑
=∑
=∑
≥ ∈= ∉
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈

( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
iik
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
Pour illustrer le déroulement d'une itération typique de la procédure,supposons qu'il y a suffisemment de points extrêmes qui ont déjà été générés pour pouvoir identifier des solutions de base duprobl ( )ème restreint avec ceux-ci.(C'est-à-dire que s'il y a contraintes contrariantes, alors 1.)
GREP
m G m≥ +

( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
solution réalisable de ( ) solution réalisable de (R )G
EP EPλ λ⇐
solution réalisable de ( ) solution optimale de (R )G
EP EPλ λ⇐

( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
Après avoir obtenu une solution de base optimale de ( ),utilisons le mécanism suivane t pour
GREPλ�
( )dériver des conditions assurant que serait aussi une solution de base optimale pour EP
λ�
( )et lorsqu'elles ne sont pas vérifiées, utiliser la solution de baseoptimale pour générer une nouvelle restriction .
GREPλ�

( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
Soient , les multiplicateurs du simplexe associés à la solutionoptimale de ( ).
GREP
π αλ���
π�
α�

( )T
1
1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,
ki
iik
i
ii
k
ii
i
EP
c x
Ax b
i k
λ
λ
λ
λ
=
=
=
∑
=∑
=∑
≥ = …
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
T T
Sous l'hypothèse de non dégénérescence, puisque est une solutionde base optimale, alors les coûts relatifs des variables , , sont non-négatifs:
0 .
i
i i
i G
c x Ax i G
λλ
π α
∈
− − ≥ ∈
�
��
T T
Si les coûts relatifs des autres variables , , sont aussi non-négatifs:
0 ,alors est optimale pour ( ).
i
i i
i G
c x Ax i G
EP
λ
π αλ
∉
− − ≥ ∉���
π�
α�
Mais rappelons queles vecteurs , ne sont pas connus
ix i G∉

{ }T TMais tout de même, vérifier que
0 1, ,i ic x Ax i kπ α− − ≥ ∈�� …
{ }T T
1, ,
est équivalent de vérifier queMin 0.i i
i kc x Axπ α
=− − ≥
�
��
{ }T T
De plus, puisque le minimum d'un problème de programmationlinéaire est toujours atteint en un point extrême, alors le problème devient equivalent de vérifier que
Min 0x
c x Axπ α∈Γ
− − ≥��
( )T T
ou encore que la valeur optimale du problème de programmationlinéaire défini avec les contraintes faciles
( ) MinSujet à
0est non négative.
SP c A x
Ex bx
λπ α− −
=≥
���

( )T T
ou encore que la valeur optimale du problème de programmationlinéaire défini avec les contraintes faciles
( ) MinSujet à
0est non négative.
SP c A x
Ex bx
λπ α− −
=≥
���
( )Si c'est le cas valeur optimale de ( ) est non négative ,SPλ�
alors est une solution optimale de ( ) et
est une solution du problème original ( ).ii
i G
EP
x x P
λ
λ∈
=∑�
��

( )T T
ou encore que la valeur optimale du problème de programmationlinéaire défini avec les contraintes faciles
( ) MinSujet à
0est non négative.
SP c A x
Ex bx
λπ α− −
=≥
���
( )T T
Sinon, dénotons par un point extrême de solution optimale de ( ) où
0.
x
SP
c A x
λ
λλπ α
Γ
− − <
�
�
���
Alors un nouveau problème restreint est généré en introduisant
une nouvelle colonne associée à et la variable correspondante dans le problème restreint actuel.
xλ
λλ
�
�

( )T T *
Si par contre est tel que
0
alors un nouveau problème restreint est généré en introduisant
une nouvelle colonne associée à et la variable correspondante
dans le problème restrei
x
c A x
x
λ
λ
λ
π α
λ
− − <
�
�
�
��
nt actuel.
TT
Problème restreint
Min
Sujet à
1
0,0
i
ii G
i
ii G
ii G
i
c x
Ax b
i G
c x
Ax
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ λ
λ
∈
∈
∈
+∑
+ =∑
+ =∑
≥≥
∈
�
�
�
�
�
�

La solution optimale pour la restriction précédente combinéeavec = 0 constitue une solution de base réalisable pour le
nouveau problème res
Note.
treint. λ
λλ �
�
( )T TAlors puisque le coût relatif de la variable
est négatif, celle-ci est candidate comme variable d'entrée
pour réduire la valeur de la fonction économique du nouveau problème restreint.
c A xλ
λ
π α
λ
− −�
�
��
TT
Problème restreint
Min
Sujet à
1
0,0
i
ii G
i
ii G
ii G
i
c x
Ax b
i G
c x
Ax
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ λ
λ
∈
∈
∈
+∑
+ =∑
+ =∑
≥≥
∈
�
�
�
�
�
�

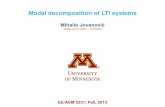
Illustration graphique

X







La procédure s'adapte facilement au cas où les contraintes faciles sont séparables en plusieurs blNote:
ocs:
1 1
1
1
1
1T 1 T
1
MinSujet à
, , 0
q
q
q q
q
q
q
q
E x b
E x b
x x
c x c xA x A x b+
≥
+
=
+ =
=
+
�
…
……
{ }1 1 1 11 1: , 0x E x b xΓ = = ≥
{ }1: , 0q q q qq x E x b xΓ = = ≥
�
{ }1
Utilisons les points extrêmes de
, ,
pour déterminer leproblème équivalent
r
rkr rx x
Γ
…1
1
Sous l'hypothèse que est borné
(i.e., est un polyhèdre)
où
1
0, 1, ,
r
rkr
r r ri
ii
krr r
r ii
r
i r
x x
x
i k
λ
λ
λ
=
=
ΓΓ
= ∑
∈Γ ⇔ =∑ ≥ =
…
Problème séparable

La procédure s'adapte facilement au cas où les contraintes faciles sont séparables en plusieurs blNote:
ocs:
1 1
1
1
1
1T 1 T
1
MinSujet à
, , 0
q
q
q q
q
q
q
q
E x b
E x b
x x
c x c xA x A x b+
≥
+
=
+ =
=
+
�
…
……
( )T
1 1
1 1
1
Problème équivalent
Min
Sujet à
1, 1, ,
0, 1, , ; 1 ,
kq rr ri
ir i
kq rr ri
rir i
krr
ii
r
i r
EP
c x
A x b
r q
i k r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ = =
…
… …
{ }1 1 1 11 1: , 0x E x b xΓ = = ≥
{ }1: , 0q q q qq x E x b xΓ = = ≥
�
1
1
Sous l'hypothèse que est borné
(i.e., est un polyhèdre)
où
1
0, 1, ,
r
rkr
r r ri
ii
krr r
r ii
r
i r
x x
x
i k
λ
λ
λ
=
=
ΓΓ
= ∑
∈Γ ⇔ =∑ ≥ =
…

Le principe de la méthode de résolution reste le même.
À chaque itération, un problème restreint est solutionné.

( )T
1 1
1 1
1
Problème équivalent
Min
Sujet à
1, 1, ,
0, 1, , ; 1 ,
kq rr ri
ir i
kq rr ri
rir i
krr
ii
r
i r
EP
c x
A x b
r q
i k r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ = =
…
… …
( )T
1 1
1 1
1
Problème restreint
Min
Sujet à
1, 1, ,
0, 1 ,0, 1 ,
Gkq r
r ri
ir i
kq rr ri
rir i
krr
ii
r
i rr
i r
REP
c x
A x b
r q
i G r qi G r q
λ
λ
λ
λλ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ ∈ == ∉ =
…
…
…

( )T
1 1
1 1
1
Problème équivalent
Min
Sujet à
1, 1, ,
0, 1, , ; 1 ,
kq rr ri
ir i
kq rr ri
rir i
krr
ii
r
i r
EP
c x
A x b
r q
i k r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ = =
…
… …
( )T
1 1
1 1
1
Problème restreint
Min
Sujet à
1, 1, ,
0, 1 ,
Gkq r
r ri
ir i
kq rr ri
rir i
krr
ii
r
i r
REP
c x
A x b
r q
i G r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ ∈ =
…
…

( )T
1 1
1 1
1
Problème restreint
Min
Sujet à
1, 1, ,
0, 1 ,
Gkq r
r ri
ir i
kq rr ri
rir i
krr
ii
r
i r
REP
c x
A x b
r q
i G r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ ∈ =
…
…
Soient , les multiplicateurs du simplexe associés à la solution optimale
, 1, , de ( ).
,
G
rr
R
q
EPλπ α =�
�� …
π�
rα�

( )T T
Pour vérifier si cette solution est optimale pour le problème équivalent, sous-problèmes ( ), 1, ,sont résolus.
( ) MinSujet à
0
r
r r
r
r r
rr
q SP r q
SP c A x
E x bx
λ
λπ α
=
− −
=≥
�
�
…
��
Si la valeur optimale de tous les sous-problèmes est supérieureou égale à 0, alors la solution est optimale pour le problèmeéquivalent.
Sinon, pour les blocs où la valeur optimale est négative, unenouvelle variable associée au point extrême (solutionoptimale) est introduite pour définir un nouveau problèmerestreint.
r r
r
xλ
λλ
�
�

1 1
1
1
1
1T 1 T
1
MinSujet à
, , 0
q
q
q q
q
q
q
q
E x b
E x b
x x
c x c xA x A x b+
≥
+
=
+ =
=
+
�
…
……
{ }1 1 1 11 1: , 0x E x b xΓ = = ≥
{ }1: , 0q q q qq x E x b xΓ = = ≥
�
Interprétation économique
11
Les contraintes contrariantes
correspondent aux contraintes relatives aux ressources et auxproduits de l'ensemble de la firme.
qqA x A x b+ + =…
Supposons que le problème est utilisé pour modeliser les opérations d'une firme ayant succursales où la production est complétée.
q
correspond aux contraintes d'opérations de la succursale r rΓ

11
Les contraintes contrariantes
correspondent aux contraintes relatives aux ressources et auxproduits de l'ensemble de l'entreprise.
qqA x A x b+ + =…
correspond aux contraintes d'opérations de la succursale r rΓ
{ }1Les points extrêmes de , , , représentent des modes
d'opérations de la succursale .
rkr rr x x
r
Γ …
Étant donnés des sous-ensembles de modes d'opérations des succursales,la firme optimise la planification de sa production glo
Interprétation de problème res
bale. De plus,à la lumière de
tr
sa
eint:
plan
r
ification, elle spécifie des prix pour les ressources et les produits.
π�
( )T
1 1
1 1
1
Problème restreint
Min
Sujet à
1, 1, ,
0, 1 ,
Gkq r
r ri
ir i
kq rr ri
rir i
krr
ii
r
i r
REP
c x
A x b
r q
i G r q
λ
λ
λ
λ
= =
= =
=
∑ ∑
=∑ ∑
= =∑
≥ ∈ =
…
…
π
rα

correspond aux contraintes d'opérations de la succursale r rΓ
{ }1Les points extrêmes de , , , représentent des modes
d'opérations de la succursale .
rkr rr x x
r
Γ …
( )La firme transmet les prix aux succursales. Elle leur demandede réoptimiser leurs opérations à la lumière de ces der
Interprétation des sous-probl
niers afinde fournir de nouve
èmes
aux modes d'
:rSP
λ
π
�
�
opérations.
Étant donnés des sous-ensembles de modes d'opérations des succursales,la firme optimise la planification de sa production glo
Interprétation de problème res
bale. De plus,à la lumière de
tr
sa
eint:
plan
r
ification, elle spécifie des prix pour les ressources et les produits.
π�
( )T T( ) MinSujet à
0
r r
r
r r
rr
SP c A x
E x bx
λπ α− −
=≥
���

Initialisation de la procédure
( )Pour générer les 1 points extrêmes de nécessaires pourdéfinir le premier problème restreint, nour utilisons une phasepréliminaire très similaire à la phase I du simplexe.
m + Γ
1
T
Déterminons un premier point extrême de en appliquant une phase I du simplexe au problème défini avec les contraintes faciles
MinSujet à
0.
x
c x
Ex b
x
Γ
=≥

1
T
Déterminons un premier point extrême de en appliquant une phase I du simplexe au problème défini avec les contraintes faciles
MinSujet à
0.
x
c x
Ex b
x
Γ
=≥
11
11
1
1
Considérons le ( ) suivant
Min 0
Sujet à
1
0, 1, ,0, 1, ,
où est le vecteur unitaire 0
problème équivalent auxiliai
, ,1,
rek
i j m
ik
i j mi j m
ik
i
i
i
j
j m
EPA
Ax e e e b
i k
j m
e R
λ τ τ τ
λ τ τ τ
λ
λτ
=
=
=
+ + + + +
± ± ± ± ± =
=
≥ =
≥ =
∈
∑
∑
∑
… …
… …
…
…
… …[ ]T
,0 avec le 1
en position.ièmej

11
11
1
1
1
Min 0
Sujet à
1
00, 2, ,
0, 1, , .
k
i j m
ik
i j mi j m
ik
i
i
i
j
Ax e e e b
i k
j m
λ τ τ τ
λ τ τ τ
λ
λλ
τ
=
=
=
+ + + + +
± ± ± ± ± =
=
≥= =
≥ =
∑
∑
∑
… …
… …
…
…
Le signe devant chaque variable est choisi de telle sorte que0 et qu'il y ait une solution trivial au problème restreint
suivant associé à ( )
j
j
EPA
τ
τ ≥

11
11
1
1
1
Min 0
Sujet à
10
0,
k
i j m
ik
i j mi j m
i
i
Ax e e e b
λ τ τ τ
λ τ τ τ
λλ
λ
=
=
+ + + + +
± ± ± ± ± =
=≥
=
∑
∑
… …
… …
2, ,
0, 1, , .j
i k
j mτ
=
≥ =
…
…
Le signe devant chaque variable est choisi de telle sorte que0 et qu'il y ait une solution trivial au problème restreint
suivant associé à ( )
j
j
EPA
τ
τ ≥

11
11
1
1
1
Min 0
Sujet à
10
0,
k
i j m
ik
i j mi j m
i
i
Ax e e e b
λ τ τ τ
λ τ τ τ
λλ
λ
=
=
+ + + + +
± ± ± ± ± =
=≥
=
∑
∑
… …
… …
2, ,
0, 1, , .j
i k
j mτ
=
≥ =
…
…
1
1 11
Puisque 1, alors les premières contraintes se reduisent à
.j mj m
m
Ax e e e b
λ
τ τ τ
=
± ± ± ± =… …( )
( )
1
1
Ainsi pour chaque 1, , ,
ou encore
.
j jj
j jj
j m
Ax b
b Ax
τ
τ
=
± =
± = −
…

11
11
1
1
1
Min 0
Sujet à
10
0,
k
i j m
ik
i j mi j m
i
i
Ax e e e b
λ τ τ τ
λ τ τ τ
λλ
λ
=
=
+ + + + +
± ± ± ± ± =
=≥
=
∑
∑
… …
… …
2, ,
0, 1, , .j
i k
j mτ
=
≥ =
…
…
( )
( )
1
1
Ainsi pour chaque 1, , ,
ou encore
.
j jj
j jj
j m
Ax b
b Ax
τ
τ
=
± =
± = −
…
( )1
Donc pour chaque 1, , ,tel que
0
alors le signe devant est + pour avoir 0.
jj
j
j
j m
b Ax
τ
τ
=
− ≥
≥
…

11
11
1
1
1
Min 0
Sujet à
10
0,
k
i j m
ik
i j mi j m
i
i
Ax e e e b
λ τ τ τ
λ τ τ τ
λλ
λ
=
=
+ + + + +
± ± ± ± ± =
=≥
=
∑
∑
… …
… …
2, ,
0, 1, , .j
i k
j mτ
=
≥ =
…
…
( )
( )
1
1
Ainsi pour chaque 1, , ,
ou encore
.
j jj
j jj
j m
Ax b
b Ax
τ
τ
=
± =
± = −
…
( )1
Donc pour chaque 1, , ,tel que
0
alors le signe devant est pour avoir 0.
jj
j
j
j m
b Ax
τ
τ
=
− <
−
≥
…

1
Nous appliquons la décomposition de Dantzig-Wolfe auproblème auxiliaire équivalent ( ) pour reduire la valeur
de la somme des variables artificielles .m
j
j
EPA
τ=
∑
Au cours de cette résolution, nous générons des points extrêmesde .Γ
( )1
Si la valeur de est réduite à 0, alors sous l'hypothèse de
non dégénérescence, au moins 1 points extrêmes de sontgénérés.
m
j
j
m
τ=
+ Γ
∑
( )Avec ces 1 points extrêmes de , nous retournons à la résolution de ( ).
m
EP
+ Γ
( )1
Si 0 à l'optimum, alors le problème n'est pas
réalisable.
m
j
j
EPτ=
>
∑

( )
11
11
1
1
0
Puisque les coefficients des variables dans la fonction économique de sont 0
Mi
Note.
n
Sujet à
1
0, 1, ,0, 1, ,
alors le
i
k
i j m
ik
i j mi j m
ik
i
i
i
j
EPA
Ax e e e b
i k
j m
λ
λ τ τ τ
λ τ τ τ
λ
τ
α
λ
π
=
=
=
+ + + + +
± ± ± ± ± =
=
≥ =≥ =
∑
∑
∑ �
… …
… …
…
…
�
( )T T
s sous problèmes pour vérifier si la solution optimale du problème restreint est optimal pour le problème equivalent auxiliaire sont de la fo
0
rme suivante
Min
Sujet à 0.
A x
Ex b
x
π α− −
=≥
��

( )
1
11
étant donné la solution optimale , pour le probleme restreint de
Min
Sujet à
1
0,0, 1, ,
alors le sous problème pour v
0
ér
i j m
i G
i j mi j m
i G
i
i G
i
j
EPA
Ax e e e b
i G
j m
π
λ τ
λ τ τ τ
λ τ τ τ
λ
λτ
α
∈
∈
∈
+ + + + +
± ± ± ± ± =
=
≥ ∈≥ =
∑
∑
∑
� �
… …
… … �
…
�
( )T
ifier si la solution optimale , du problème restreint est optimal pour le problème equivalent auxiliaire est de la forme suivante
MinSujet à
0.
0
EPA
Ax
Ex b
x
λ τ
π α− −
=≥
� �
��
T
Coût relatif de
0
:ii
Ax
λ
π α− − ��

Existence de bornes inférieure et supérieure
sur la valeur optimal
T
À chaque résolution d'un problème restreint, la solution optimale est réalisable pour le problème équivalent ( ). Donc sa valeur
est une borne supérieur sur la valeur optimale de (ii
i G
EP
z c x z E
λ
λ∈
=∑�
��
T
) :
.ii
i G
P
z z c xλ∈
≤ =∑ ��
T T
De plus, par le théorème de dualité forte
.ii
i G
z c x bλ π α∈
= = +∑ � ���
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
π�
α�

( )
Pour dériver une borne inférieure sur , considérons une combinaison linéaire des contraintes de ( ) en utilisant les multiplicateurs optimaux du simplexe et de :
M
G
z
EP
REPπ α��
( )
T
1
1
1
T T
1
in
Sujet à
1
0, 1, ,pour obtenir
ki
i
ik
ii
ik
i
i
i
k
ii
i
z c x
Ax b
i k
Ax b
π
λ
λ
λ
λ
λ π α π α
α
=
=
=
=
=
=
=
≥ =
+ = +
∑
∑
∑
∑
…
� �� �
�
�
( ) ( )T T T
1
Soustrayons cette équation de la fonction économique:
.k
i ii
i
c x Ax z bλ π α π α=
− − = − +∑ � �� �
−

( ) ( )T T T
1
Soustrayons cette équation de la fonction économique:
.k
i ii
i
c x Ax z bλ π α π α=
− − = − +∑ � �� �
T T
De plus, par le théorème de dualité forte
.ii
i G
z c x bλ π α∈
= = +∑ � ���
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
α�
π�

( ) ( )T T T
1
Soustrayons cette équation de la fonction économique:
.k
i ii
i
c x Ax z bλ π α π α=
− − = − +∑ � �� �
T T
par le théorème de dualité forte
.ii
i G
z c x bλ π α∈
= = +∑ � ���
( )T T
1
Ainsi
.k
i ii
i
c x Ax z zλ π α=
− − = −∑ �� �
( ) ( )T T T T
Puisque est une solution optimale du sous problème ( )
1, , .i i
x SP
c x Ax c x Ax i k
λλ
λ λπ α π α− − ≤ − − =
�
�
� �� �� � …
( ) ( )T T T T
1 1
Par conséquent, puisque 0, =1, ,
.
ik k
i ii i
i i
i k
c x Ax c x Ax z zλ λ
λ
λ π α λ π α= =
≥
− − ≤ − − = −∑ ∑� �
…
� �� � �
( )T T( ) MinSujet à
0
SP c A x
Ex bx
λπ α− −
=≥
���

( ) ( )T T T T
1 1
Par conséquent, puisque 0, =1, ,
.
ik k
i ii i
i i
i k
c x Ax c x Ax z zλ λ
λ
λ π α λ π α= =
≥
− − ≤ − − = −∑ ∑� �
…
� �� � �
1
Mais également 1k
i
i
λ=
=∑
( )
( )
T T
T T
et alors
ou encore
c x Ax z z
c x Ax z z
λ λ
λ λ
π α
π α
− − ≤ −
− − + ≤
� �
� �
�� �
�� �
borne inférieure

( )T T
En somme
c x Ax z zzλ λπ α− − + ≤ ≤� �
� � ��
valeur optimale de ( )SP
λ�
valeur optimale duproblème équivalent restreint
non croissante d'une itération à l'autre
pas nécessairement non décroissante d'une itération à l'autre
Néanmoins, dénotons par la plus grande borne inférieure générée jusqu'ici au cours de la résolution. Cette valeur est mise à jour à chaque résolution d'un nouveau problème restreint.
LB
Si ,alors puisque ,il s'ensuit que et la solution actuelle est -optimale.
z LB
LB z z
z z z LB
ε
ε
λ ε
− ≤≤ ≤
− ≤ − ≤
�
�
� �
�

Convergence de la procédure de Dantzig-Wolfe
( )Considérons le problème équivalent et démontrons la convergence de la procédure de Dantzig-Wolfe une fois quela phase préliminaire a été complétée pour générer ( 1) points extrême de . Notons que
EP
m +Γ la même preuve s'applique
pour démontrer la convergence de la phase préliminaire.
Formulons la procédure de Dantzig-Wolfe dans le cadre de lastratégie de restriction.

{ } Soit . Soit 1, , . Rappelons que nousdénotons le problème restreint du problème équivalent ( ) associé au sous
Initialisat
-ensemble par ( ).
ion.
G
z G k
EP
G REP
= ∞ ⊂ …
Résoudre le problème Étape ) 1 ( .. GREP
Si ( ) n'est pas borné inférieurement, alors la procédure s'arrête car le problème équivalent est également non bornéinférieurement. (Ceci ne s'applique que lorsque n'est pas borné.)
GREP
Γ
Autrement, soient la valeur optimale et une solution optimale de ( ), et soient , les multiplicateurs optimaux correspondants.G
z
REP
λπ α
��
��
Vérifier si est aussi une solution optimale de ( )en vérifiant si les coûts relatifs des variables associés aux pointsextrêmes , , sont au
Éta
ssi
pe 2
non nég f :
.
ati si
i
EP
x i G
λλ
∉
�
( )T
Problème restreint
Min
Sujet à
1
0,
G
i
ii G
i
ii G
ii G
i
REP
c x
Ax b
i G
λ
λ
λ
λ
∈
∈
∈
∑
=∑
=∑
≥ ∈
π�
α�
T T 0 ,i ic x Ax i Gπ α− − ≥ ∉��

Résoudre le problème Étape ) 1 ( .. GREP
Si ( ) n'est pas borné inférieurement, alors la procédure s'arrête car le problème équivalent est également non bornéinférieurement. (Ceci ne s'applique que lorsque n'est pas borné.)
GREP
Γ
Autrement, soient la valeur optimale et une solution optimale de ( ), et soient , les multiplicateurs optimaux correspondants.G
z
REP
λπ α
��
��
Vérifier si est aussi une solution optimale de ( )en vérifiant si les coûts relatifs des variables associés aux pointsextrêmes , , sont au
Éta
ssi
pe 2
non nég f :
.
ati si
i
EP
x i G
λλ
∉
�
Pour y arriver, résoudre le sous-problème ( ). Si la valeur
optimale est non négative, alors est aussi solution optimale de ( ), et la procédure s'arrête.
SP
EP
λ
λ
�
�
T T 0 ,i ic x Ax i Gπ α− − ≥ ∉��
( )T T( ) MinSujet à
0
SP c A x
Ex bx
λπ α− −
=≥
���

Vérifier si est aussi une solution optimale de ( )en vérifiant si les coûts relatifs des variables associés aux pointsextrêmes , , sont au
Éta
ssi
pe 2
non nég f .
.
ati si
i
EP
x i G
λλ
∉
�
Pour y arriver, résoudre le sous problème ( ). Si la valeur
optimale est non négative, alors est aussi solution optimale de ( ), et la procédure s'arrête.
SP
EP
λ
λ
�
�
. Sinon, dénotons par la solution optimale de ( ).
est un point extrême de dont l'indice n'appartient pas à .Incluons son indice d
Étap
ans
e
un ensemble .
3 x SP
x G
V
λλ
λ Γ
�
�
�
{ }Définissons l'ensemble : 0 .iD i G λ⊂ ∈ =�
. Si , alors , remplacer par etreprendre l'éÉ
tapet
.4
1ape z z z z G G G V D′< = = −� � ∪
Si , alors remplacer par et reprendre l'étape 1.z z G G G V′= =� ∪
( )T T( ) MinSujet à
0
SP c A x
Ex bx
λπ α− −
=≥
���
Dans la présentation précédente,
nous supposions que D = Φ

-
-Preuve
. La solution optimale de ( ) est aussi optimale pour le problème restreint ( ).
. Puisque les contraintes du problème ( ) sontplus restrictive
Le
s que celles de ( ) (en e f
m e 1
f
m G
G D
G D
G
REP
REP
REP
REP
λ�
{ }
-
-
et il y a plus devariables forcées de prendre la valeur 0 dans ( )), alors
val. opt ( ) val. opt ( ) .
Mais par définition de : 0 , il s'ensuit que est
une solution réalisable d
G D
G D G
i
REP
REP REP z
D i G λ λ
≥ =
⊂ ∈ =
�
� �
-
-
-
-
e ( ), et ainsi val. opt ( ).
Par conséquent val. opt ( ) et est aussi optimale pour le problème restreint ( ).
G D
G D
G D
G D
REP
z REP
z REP
REP
λ
≥
=
�
��
�
{ }: 0 .iD i G λ⊂ ∈ =�

. val. opt ( ) val. opt ( ).
. Si , alors le domaine réalisable de ( ) est plus grand que celui de ( ) et
val. opt ( ) val. opt ( ).
Si , alo
Pre
Lemm
rs par le
u
l
e
e
em
v
2 G G
G
G
G G
REP REP
G G V REP
REP
REP REP
G G V D
′
′
′
≤
′ =
≤
′ = −
∪
∪ me 1, val. opt ( ) val. opt ( ).
Ainsi le résultat est vérifié avec l'argument plus haut.G D GREP REP− =
�

{ }
. La procédure de Dantzig-Wolfe se termine en un nombre fini d'itérations.
. Puisque l'ensemble des indices des points extrêmes1, , est fini, alors il comporte un nomb
Théorème
re fini d
3
ePre
so -euve
usk…
{ }
nsemblesdifférents.
Aussi longtemps que les valeurs optimales des problèmes restreintsdiminuent strictement d'une itération à l'autre, alors le même sous-ensemble de 1, , ne peut se répéter pour défink… ir un problème restreint.
De plus, lorsque la valeur optimale n'est pas améliorée, un nouvel indice est ajouté au sous-ensemble utilisé pour définir le prochainproblème restreint. Ainsi, la valeur opti
{ }
male ne peut rester constante que pour un nombre fini de fois avant que le sous-ensemble utilisé pour définir le prochain problème restreint ne soit égal à 1, , .
k…
�

.Le même argument s'applique pour démontrer la convergenceau cours de la phase pélimina
Notes
ire.
Globalement, la procédure de Dantzig-Wolfe converge en un nombre fini d'itérations car les problèmes restreints et lessous problèmes peuvent être résolus avec le simplexe quiconverge en un nombre fini d'itérations.

Exemple numérique
1 2 1 2
1 2 1 2
1 2
1 2
1
2
1 2
1 2
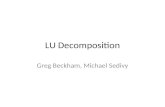
Considérons l'exemple suivant tiré du livre de Lasdon (p. 155)
Min 2 Sujet à 2 2 40
3 302 20
101015
,
z x x y y
x x y y
x x
x x
y
y
y y
x x
= − − − −+ + + ≤+ ≤+ ≤
≤≤
+ ≤
1 2, , 0y y ≥
Γ
1Γ
2Γ1 2= Γ Γ∪

10 20 30
10
20
5 10 15
5
10
15
( )6,8
( )5,10
( )10,5
1x
2x
1y
2y1 2
1 2
1 2
3 302 20
, 0
x x
x x
x x
+ ≤+ ≤
≥
1
2
1 2
1 2
101015
, 0
y
y
y y
y y
≤≤
+ ≤≥
[ ]T1 1
Le premier problème équivalent restreint est obtenu en utilisant
0,0x y= =
1 1
1 1
1
1
1 1
Min 0 0Sujet à 0 0 + 40
1 1
, , 0
z
s
s
λ µλ µλ
µλ µ
= ++ =
==
≥
1 2 1 2
1 2 1 2
1 2
1 2
1
2
1 2
1 2 1 2
Min 2Sujet à 2 2 40
3 302 20
101015
, , , 0
z x x y y
x x y y
x x
x x
y
y
y y
x x y y
= − − − −+ + + ≤+ ≤+ ≤
≤≤
+ ≤≥

1 1
1 1
1
1
1 1
Min 0 0Sujet à 0 0 + 40
1 1
, , 0
z
s
s
λ µλ µλ
µλ µ
= ++ =
==
≥
1 1La solution optimale de ce problème est 1, 40,les multiplicateurs sont = = =0, et la valeur optimale est 0.
s
z
λ µπ α γ
= = ==
� � �
� �� �
παγ

10 20 30
10
20
5 10 15
5
10
15
( )6,8
( )5,10
( )10,5
1x
2x
1y
2y1 2
1 2
1 2
3 302 20
, 0
x x
x x
x x
+ ≤+ ≤
≥
1
2
1 2
1 2
101015
, 0
y
y
y y
y y
≤≤
+ ≤≥
( )T T
Sous-problèmes à résoudreMin
Sujet à 0
c A x
Ex bx
π α− −
=≥
��
1 2
1 2
1 2
1 2
Min Sujet à 3 30 2 20
, 0
x xx xx xx x
− −+ ≤+ ≤
≥
1 2
1
2
1 2
1 2
Min 2Sujet à 10
1015
, 0
y yy
yy yy y
− −≤≤
+ ≤≥
[ ][ ]
T 1, 11, 2
0, 0
c
A
π α
= − −== =��
[ ][ ]
T 2, 12,1
0, 0
c
A
π γ
= − −== =��
[ ]T* 6,8
v. opt 14x =
= − [ ]T* 10,5
v. opt 25y =
= −
0 14 25 39LB = − − = −

Puisque 39 0, nous poursuivons. LB z− = < =�
1 2 1 2
1 2 1 2
1 2
1 2
1 2 1 2
Min 0 14 0 25Sujet à 0 22 0 +25 + 40
+ 1 1
, , , , 0
z
s
s
λ λ µ µλ λ µ µλ λ
µ µλ λ µ µ
= − + −+ + =
=+ =
≥
1 2 1 2
1 2 1 2
1 2
1 2
1
2
1 2
1 2 1 2
Min 2Sujet à 2 2 40
3 302 20
101015
, , , 0
z x x y y
x x y y
x x
x x
y
y
y y
x x y y
= − − − −+ + + ≤+ ≤+ ≤
≤≤
+ ≤≥
[ ] [ ]
2
2T T2 2
Le prochain problème équivalent restreint est obtenu en ajoutant et associés respectivement à
6,8 et 10,5x y
λµ
= =
1 2
1 2
7 15,
22 220, 1
6 34
1114 200
= , 0,22 22
z
λ λ
µ µ
π α γ
= =
= =
= −
− = = −
� �
� �
�
� ��
TT
Problème restreint
Min
Sujet à
1
0,0
i
ii G
i
ii G
ii G
i
c x
Ax b
i G
c x
Ax
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ λ
λ
∈
∈
∈
+∑
+ =∑
+ =∑
≥≥
∈
�
�
�
�
�
�

10 20 30
10
20
5 10 15
5
10
15
( )6,8
( )5,10
( )10,5
1x
2x
1y
2y1 2
1 2
1 2
3 302 20
, 0
x x
x x
x x
+ ≤+ ≤
≥
1
2
1 2
1 2
101015
, 0
y
y
y y
y y
≤≤
+ ≤≥
( )T T
Sous-problèmes à résoudreMin
Sujet à 0
c A x
Ex bx
π α− −
=≥
��
1 2
1 2
1 2
1 2
8 6Min
22 22Sujet à 3 30 2 20
, 0
x x
x xx xx x
− +
+ ≤+ ≤
≥
1 2
1
2
1 2
1 2
16 8 200Min
22 22 22Sujet à 10
1015
, 0
y y
yy
y yy y
− − +
≤≤
+ ≤≥
[ ][ ]
T 1, 11, 214
, 022
c
A
π α
= − −=
= − =��
[ ][ ]
T 2, 12,114 200
,22 22
c
A
π γ
= − −=
= − = −��
[ ]T* 10,0
80v. opt
22
x =
= − [ ]T* 10,5
v. opt 0y =
=
6 80 234 0 38
11 22 11LB = − − − = −

2 6Puisque 38 34 , nous poursuivons.
11 11LB z− = < = −�
1 2 3 1 2
1 2 3 1 2
1 2 3
1 2
1 2 3 1 2
Min 0 14 10 0 25Sujet à 0 22 10 0 +25 + 40
+ + 1 1
, , , , , 0
z
s
s
λ λ λ µ µλ λ λ µ µλ λ λ
µ µλ λ λ µ µ
= − − + −+ + + =
=+ =
≥
1 2 1 2
1 2 1 2
1 2
1 2
1
2
1 2
1 2 1 2
Min 2Sujet à 2 2 40
3 302 20
101015
, , , 0
z x x y y
x x y y
x x
x x
y
y
y y
x x y y
= − − − −+ + + ≤+ ≤+ ≤
≤≤
+ ≤≥
[ ]3
T3
Le prochain problème équivalent restreint est obtenu en ajoutant
associé à 10,0 x
λ
=
1 2 3 1 2
5 7 20, , , 0, 1, 36
12 12 34 80 200
= , ,12 12 12
zλ λ λ µ µ
π α γ
= = = = = = −
− = − = −
� � � � � �
� ��
TT
Problème restreint
Min
Sujet à
1
0,0
i
ii G
i
ii G
ii G
i
c x
Ax b
i G
c x
Ax
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ λ
λ
∈
∈
∈
+∑
+ =∑
+ =∑
≥≥
∈
�
�
�
�
�
�

10 20 30
10
20
5 10 15
5
10
15
( )6,8
( )5,10
( )10,5
1x
2x
1y
2y1 2
1 2
1 2
3 302 20
, 0
x x
x x
x x
+ ≤+ ≤
≥
1
2
1 2
1 2
101015
, 0
y
y
y y
y y
≤≤
+ ≤≥
( )T T
Sous-problèmes à résoudreMin
Sujet à 0
c A x
Ex bx
π α− −
=≥
��
1 2
1 2
1 2
1 2
2 1 80Min
3 3 12Sujet à 3 30 2 20
, 0
x x
x xx xx x
− − +
+ ≤+ ≤
≥
1 2
1
2
1 2
1 2
4 2 200Min
3 3 12Sujet à 10
1015
, 0
y y
yy
y yy y
− − +
≤≤
+ ≤≥
[ ][ ]
T 1, 11, 2
4 80,
12 12
c
A
π α
= − −=
= − = −��
[ ][ ]
T 2, 12,1
4 200,
12 12
c
A
π γ
= − −=
= − = −��
[ ] [ ]T* 10,0 ou 6,8
v. opt 0x =
= [ ]T* 10,5
v. opt 0y =
=
2 236 0 0 36
3 3LB = − − − = −

Critère d'optimalité satisfait puisque les deux sous-problèmesont une valeur optimale égale à 0.
Donc une solution optimale du problème original est25
5 76 10 38 0 1012 12
3105
2valeur optimale= 36 .
3
x
y
= + =
=
−
1 2 3 1 2
5 7 20, , , 0, 1, 36
12 12 3zλ λ λ µ µ= = = = = = −� � � � � � [ ] [ ]
[ ] [ ][ ]
T T1 1
T T2 2
T3
0,0 0,0
6,8 10,5
10,0
x y
x y
x
= =
= =
=

Cas où Г n’est pas borné
TProblème ( ) MinSujet à
0Ex
Pc
x
Ax bx
b=≥
= { }
{ }1
Notation:
.
L'ensemble des points extrêmes de
= : , 0
:, , .k
x x
x Ex b xΓ = ≥
Γ…
1
1
Si l'hypothèse que est borné n'est pas vérifiée (i.e., est un polytope), alors il n'est plus vrai que
où
1
0, 1, ,
ki
ii
k
ii
i
x x
x
i k
λ
λ
λ
=
=
ΓΓ
= ∑
∈Γ ⇔ =∑ ≥ =
…

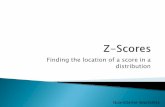
( ){ }, : 1; 2 3; 0; 0X x y x y x y x y= − + ≤ − + ≤ − ≤ − ≤
( )1,2
( )0,1
( )0,0
( ) ( ) ( )Points extrêmes de :0,0 , 0,1 , 1,2
X
enveloppe convexe des points extrêmesK
•
•
•
•
1x y− + =
2 3x y− + =

théorème de résolution de GoldmNous devons avoir recours au pour dériver un problème équiva
anlent.
{ }
Pour tout polytope : , il existe unpolyèdre et un cône tels que
.De plus, si la matrice est de plein rang, il existe une résolutionoù e
Théorème de résolution de Goldman
st l
:
'env
nX x R Ax b
K CX K CA
K
= ∈ ≤ ≠ Φ
= +
{ }eloppe convexe des points extrêmes de et où
: 0 .n
X
C x R Ax= ∈ ≤

{ }{ }
{ }
1
1
1 1
si , , dénote l'ensemble des points extrêmes de si , , dénote l'ensemble des générateurs du cône ,alors
:
Conséq
; 1; 0, 1, ,
: ; 0, 1, ,
uence:g
h
g gn
i i i ii i
n
i i ii
u u X
v v C
K x R x u i g
C x R x v i h
θ θ θ
ϕ ϕ
= =
= ∈ = = ≥ =∑ ∑
= ∈ = ≥ =
…
…
…
…{ }1
1 1
1
Si , alors est de la forme
où 1; 0, 1, , ; 0, 1, ,
h
g h
i i i ii i
g
i i ii
x X K C x
x u v
i g i h
θ ϕ
θ θ ϕ
=
= =
=
∑
∈ = +
= +∑ ∑
= ≥ = ≥ =∑ … …

( ){ }, : 1; 2 3; 0; 0X x y x y x y x y= − + ≤ − + ≤ − ≤ − ≤
( )1,2
( )0,1
( )0,0 ( ) ( )Points générateurs du cône :1,0 et 2,1
satisfaisant le système suivant:0
2 000
C
x yx yxy
− + ≤− + ≤− ≤− ≤
( )1,0
( )2,1
( ) ( ) ( )Points extrêmes de :0,0 , 0,1 , 1,2
X
enveloppe convexe des points extrêmesK
•
•
• •
•

( ){ }, : 1; 2 3; 0; 0X x y x y x y x y= − + ≤ − + ≤ − ≤ − ≤
( )1,2
( )0,1
( )0,0 ( ) ( )Points générateurs du cône :0,1 et 2,1
satisfaisant le système suivant:0
2 000
C
x yx yxy
− + ≤− + ≤− ≤− ≤
( )0,1
( )2,1
( ) ( ) ( )Points extrêmes de :0,0 , 0,1 , 1,2
X
enveloppe convexe des points extrêmesK
•
•
• •
•

{ }
{ }{ }
1
1
Appliquons le théorème de résolution de Goldman au polytope
= : , 0 .
Dénotons
, , , l'ensemble des points extrêmes de
, , , l'ensemble des générateurs du cône ,
alors
: ;
g
h
ni i i
x Ex b x
u u
v v C
K x R x uθ θ
Γ = ≥
Γ
= ∈ = =
…
…
1 1
1
1 1
1
1; 0, 1, ,
: ; 0 , 1, ,
Si , alors est de la forme
où 1; 0, 1, , ; 0, 1, , .
g g
i
i i
hn
i i i
i
g h
i i i i
i ig
i i i
i
i g
C x R x v i h
x K C x
x u v
i g i h
θ
ϕ ϕ
θ ϕ
θ θ ϕ
= =
=
= =
=
≥ =
= ∈ = ≥ =
∈Γ = +
= +
= ≥ = ≥ =
∑ ∑
∑
∑ ∑
∑
…
…
… …

( )T T
1 1
1 1
1
Problème équivalent
Min
Sujet à
1
0, 1, ,0, 1, ,
g hi i
i ii ig h
i i
i ii ig
ii
i
i
EP
c u c v
Au Av b
i gi h
θ ϕ
θ ϕ
θ
θϕ
= =
= =
=
+∑ ∑
+ =∑ ∑
=∑
≥ =≥ =
……
TProblème ( ) MinSujet à
0Ex
Pc
x
Ax bx
b=≥
=
1 1
1
Si , alors
où 1; 0,
0, 1, ,0, 1, , .
g h
i i i i
i ig
i i
i
i
i
x K C
x u v
i g
i h
θ ϕ
θ θ
θϕ
= =
=
∈Γ = +
= +
= ≥
≥ =
≥ =
∑ ∑
∑…
…
Problème équivalent

( )
Le choix du type de variables à introduire pour générer le prochainproblème restreint depend de l'issue de la résolution du sous-problème
défini avec les contraintes faciles. SPθϕ� �
( )T T
Si le minimum est atteint au point extrême et si
0
alors un nouveau problème restreint est généré en introduisant
une nouvelle colonne associée à et la variable correspondan
u
c A u
u
θϕ
θϕ
θϕ
π α− − <
� �
� �
� �
��
te dans le problème restreint actuel.
θϕθ � �
( )T T( ) MinSujet à
0
SP c A x
Ex bx
θϕπ α− −
=≥
� ���

( )
Le choix du type de variables à introduire pour générer le prochainproblème restreint depend de l'issue de la résolution du sous-problème
défini avec les contraintes faciles. SPθϕ� �
( )
( )T T
Si sous-problème n'est pas borné inférieurement, alors
nous déterminons un point du cône tel
0
pour déterminer un nouveau problème restreint généré en
introduisant une nouvel
SP
v C
c A v
θϕ
θϕ
θϕπ α− − <
� �
� �
� � ��
le colonne associée à et la variable correspondante dans le problème restreint actuel.
vθϕ
θϕϕ
� �
� �
( )T T( ) MinSujet à
0
SP c A x
Ex bx
θϕπ α− −
=≥
� ���

–
T Min Sujet à
0
c xAx bx
=≥
Itération où est variable d'entrée : 0
Problème non borné: 0
s s
s
x c
a•
<
≤
T T
00
B
s
R s
B B
x bx x
x
c x c x z
−
= =
= =

–
T Min Sujet à
0
c xAx bx
=≥
Itération où est variable d'entrée : 0
Problème non borné: 0
s s
s
x c
a•
<
≤
T T
00
B
s
R s
B B
x bx x
x
c x c x z
−
= =
= =
T T
Soit obtenu à partir de en augmentant de 1:
1 0 ;00
s
B s s s
s B B s
x x x
x a x b ax x c x c x c
• • − − = = ≥ = +
�
�� � �

T Min Sujet à
0
c xAx bx
=≥
Itération où est variable d'entrée : 0
Problème non borné: 0
s s
s
x c
a•
<
≤
T T
00
B
s
R s
B B
x bx x
x
c x c x z
−
= =
= =
T T
Soit obtenu à partir de en augmentant de 1:
1 0 ;00
s
B s s s
s B B s
x x x
x a x b ax x c x c x c
• • − − = = ≥ = +
�
�� � �
} ( )
( )T T T T
Soit
ˆ 1 0 1 00 0 0
ˆ 0
ˆ 0
s s
B B s B B s
b a abx x x
Ax bAx A x x
Ax b
c x c x x c x c c x c
• • − − = − = − = ≥
= ⇒ = − ==
= − = + − = <
�
��
�

Extension au cas non-linéaire
( )( )
Soit le problème de programmation mathématique ( ) Min
Sujet à 1, ,
où est un ensemble convexe borné et , , 1, , sont desfonctions convexes
i i
n
i
P f x
h x b i m
x R
f h i m
≤ =
∈Γ ⊂Γ =
…
…
sur .Γ
{ }1
Par analogie avec le cas linéaire, considérons un ensemble de
points , , de afin d'approximer avec l'enveloppe
convexe de ces points.
kx x Γ Γ…
T MinSujet à
0
Ax b
x
x
Ex
c
b=≥
=

( )( )
Soit le problème de programmation mathématique Min
Sujet à 1, ,
où est un ensemble convexe borné et , , 1, , sont desfonctions convexes
i i
n
i
f x
h x b i m
x R
f h i m
≤ =
∈Γ ⊂Γ =
…
…
sur .Γ
{ }1
1 1
Par analogie avec le cas linéaire, considérons un ensemble de
points , , de afin d'approximer avec l'enveloppe
convexe de ces points : ; 1; 0, 1, ,
k
k kn j
j j j
j j
x x
x R x x j kα α α= =
Γ Γ
∈ = = ≥ =
∑ ∑
…
…
Γ 1x
2x
3x4
x
5x

( ) ( )( )
Soit le problème de programmation mathématique Min
Sujet à 1, ,
où est un ensemble convexe borné et , , 1, , sont desfonctions convexes sur
i i
n
i
P f x
h x b i m
x R
f h i m
≤ =
∈Γ ⊂Γ =
…
…
.Γ
( )
1 1
Définissons une premiere approximation de en utilisant les
points : ; 1; 0, 1, ,k k
n jj j j
j j
P
x R x x j kα α α= =
∈ = = ≥ =
∑ ∑ …
Γ 1x
2x
3x4
x
5x
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
i j i
j
k
j
j
j
AP f x
h x b i m
j k
α
α
α
α
=
=
=
≤ =
=
≥ =
∑
∑
∑
…
…
↔ Γ

( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
i j i
j
k
j
j
j
AP f x
h x b i m
j k
α
α
α
α
=
=
=
≤ =
=
≥ =
∑
∑
∑
…
…
( )
( )
( )
1 1
1 1
Pour obtenir une approximation linéaire remplaçons
k kj j
j j
j j
k kj j
i j j i
j j
ALP
f x f x
h x h x
α α
α α
= =
= =
→
→
∑ ∑
∑ ∑
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
≤ =
=
≥ =
∑
∑
∑
…
…

( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
≤ =
=
≥ =
∑
∑
∑
…
…
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
ou l'équivalent

{ }
( )
1Tout comme dans le cas linéaire, l'ensemble des points , ,
est généré itérativement à mesure que chacun de ces derniers devient intéressant pour réduire la valeur de la fonction économique de .
kx x
ALP
…
Γ 1x
2x
3x4
x
5x
( )
1La procédure de résolution est amorcée avec un premier point pour définir un premier problème restreint de .
x
ALP
( )
À une itération générale, nous disposons d'un ensemble de pointsdont les indices appartiennent à un ensemble pour définir le problème restreint .G
G
RALP
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…

( )
À une itération générale, nous disposons d'un ensemble de pointsdont les indices appartiennent à un ensemble pour définir le problème restreint .G
G
RALP
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…

{ }
( )
1Tout comme dans le cas linéaire, l'ensemble des points , ,
est généré itérativement à mesure que chacun de ces derniers devient intéressant pour réduire la valeur de la fonction économique de .
kx x
ALP
…
Γ 1x
2x
3x4
x
5x
( )( )
1La procédure de résolution est amorcée avec un premier point pour résoudre un problème auxiliaire et déterminer un ensemble
de points de définissant un premier problème restreint de .
x
ALPA
ALP
∈Γ
Γ
( )
À une itération générale, nous disposons d'un ensemble de pointsdont les indices appartiennent à un ensemble pour définir le problème restreint .G
G
RALP
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
( )Determinons un premier problème rI enitialisa streint dtion . e ALP
Résoudre le problème Étape ( 1. ). GRALP

( )
À une itération générale, nous disposons d'un ensemble de pointsdont les indices appartiennent à un ensemble pour définir le problème restreint .G
G
RALP
( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…
Résoudre le problème (Étape ) 1 .. GRALP

( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…
( )
[ ]T1 0
Résolvons le problème avec l'algorithme du simplexe.Soit
une solution de base optimale
= , , , le vecteur de multiplicateurs optimaux
G
m
RALP
α
π π π π
�
� � � �…
iπ�
0π�
( ) ( ) 01
Dénotons par le coût relatif de la variable , :
0 .
j j
mj j
j i i
i
j G
f x h x j G
ξ α
ξ π π=
∈
= + + ≥ ∈∑ � �
Résoudre le problème ( ).Déterminons une solution optimale de ( )et les multiplicateurs optima
Étape
ux correspondants
1 .
.
G
G
RALP
RALP

( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
iπ�
0π�
{ }( )
, alors la solution , et
0, , est optimale pour le pr
Si
oblème .
0 pour tout 1, , j
j
j j G
j G AL
k
P
j α
α
ξ ∈
= ∉
≥ ∈ �
�
…
( ) ( ) 01
Dénotons par le coût relatif de la variable , :
0 .
j j
mj j
j i i
i
j G
f x h x j G
ξ α
ξ π π=
∈
= + + ≥ ∈∑ � �
Mécanisme de vérification: Vérifier si la solution est optimale pour ( )en vérifiant si les coûts relatifs des autres variables dont les indices sont aussi n
Étape
on négatif
.
s:
2 ALP
j G∉

Mécanisme de vérification: Vérifier si la solution est optimale pour ( )en vérifiant si les coûts relatifs des autres variables dont les indices sont aussi non négatifsPo
Étape 2
ur y arriver.
,
.
ALP
j G∉
résoudre un sous-problème defini à partir des coûts relatifs.

( ) ( )
( )1
1
1
Min
Sujet à ; 1, ,
1
0 ; 1, ,
kj
j
j
kj
j i i
j
k
j
j
j
ALP f x
h x b i m
j k
α
α
α
α
=
=
=
− ≥ − =
− = −
≥ =
∑
∑
∑
…
…
iπ�
0π�
( ) ( ) 01
Puisque les points , , ne sont pas connus à l'avance, nousallons vérifier si le coût relatif
0
en déterminant la solution optimale du sous-problème suivant défini sur
j
mj j
j i i
i
x j G
f x h x j G
xα
ξ π π=
∉
= + + ≥ ∉∑�
� �
( ) ( ) ( ) ( )0 01 1
:
Min .m m
i i i ix
i i
f x h x f x h xα απ π π π∈Γ
= =
Γ
+ + = + +
∑ ∑� �� � � �
Mécanisme de vérification: Vérifier si la solution est optimale pour ( )en vérifiant si les coûts relatifs des autres variables dont les indices sont aussi non négatifsPo
Étape 2
ur y arriver.
,
.
ALP
j G∉
résoudre un sous-problème defini à partir des coûts relatifs.

( ) ( )
( )
01
Puisque les points , , ne sont pas connus à l'avance, pourvérifier si le coût relatif
0
en déterminant la solution optimale du sous-problème suivant défini sur :
j
mj j
j i i
i
x j G
f x h x j G
x
f x
α
α
ξ π π=
∉
= + + ≥ ∉
Γ
∑�
�
� �
( ) ( ) ( )0 01 1
Min .m m
i i i ix
i i
h x f x h xαπ π π π∈Γ
= =
+ + = + +
∑ ∑�� � � �
( ) ( ){ }
( )
01
Si
0
alors 0 pour tout 1, , , et par conséquent la solution
, et 0, , est optimale pour le problème .
m
i i
i
j
j j
f x h x
j k
j G j G ALP
α απ π
ξ
α α
=
+ + ≥
≥ ∈
∈ = ∉
∑� �� �
…
� �
Mécanisme de vérification: Vérifier si la solution est optimale pour ( )en vérifiant si les coûts relatifs des autres variables dont les indices sont aussi non négatifs.Pou
Étape 2
r y arriver
.
,
ALP
j G∉
Si la valeur optimale est non négative, alors nous avorésoudre un sous-problème defini à partir des coûts re
ns une solution optimale de ( ), et la procédure
l
s
atifs.
'arrête.ALP

( ) ( )
( )
01
Puisque les points , , ne sont pas connus à l'avance, pourvérifier si le coût relatif
0
en déterminant la solution optimale du sous-problème suivant défini sur :
j
mj j
j i i
i
x j G
f x h x j G
x
f x
α
α
ξ π π=
∉
= + + ≥ ∉
Γ
∑�
�
� �
( ) ( ) ( )0 01 1
Min .m m
i i i ix
i i
h x f x h xαπ π π π∈Γ
= =
+ + = + +
∑ ∑�� � � �
( ) ( ) 01
Si
0
alors le point devient un nouveau point utilisé pour améliorer l'approximation de et ainsi définir un nouveau problème restreint
en introduisant une nouvelle colonne as
m
i i
i
f x h x
x
α α
α
π π=
+ + <
Γ
∑� �
�
� �
sociée à et la variable correspondante dans le problème restreint actuel.
xα
αα
�
�
( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jj
j G
jj i i
j G
j
j G
j
f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…
( ) ( )
( ) ( )
Min
Sujet à ; 1, ,
1
0 ; , 0
jj
j G
jj i i
j G
j
j G
j
i
f x
h
f x
h x b i m
j G
x
αα
αα
α
α
α
α
α
α
αα
αα
∈
∈
∈
−
+
−
−
≥
≥ − =
− = −
≥ ∈
∑
∑
∑
��
��
�
�
…
Sinon, est un point de dont l'indice n'appartientpas à .Incluons son indice dans un ensemble .Définissons l
Ét
'e
.
n
ap
semble .
e 3 x
G V
D
α Γ
= Φ
�
Remplacer par et reprendre l'étape 1.Étape 4. G G G V D′ = −∪

( ) ( ) ( ) ( )
( )
0 01 1
Si
Min 0,
alors
est solution optimale d
Théorèm
e
e:
.
m m
i i i ix
i i
jj
j G
f x h x f x h x
x x
P
α απ π π π
α
∈Γ= =
∈
+ + = + + ≥
=
∑ ∑
∑
� �� � � �
��
( ) Démontrons d'abord que est une solution réalisable
de à cause des hypothèses de convexité. En effet,
, 1, 0,
impliquent que puisque est conv
Preu
exe.
ve.
jj j j
j G j G
x
P
x x j G
x
α α α∈ ∈
= = ≥ ∈
∈Γ Γ
∑ ∑
�
� � ��
�
( ) ( )
( )
De plus, puisque est convexe pour tout 1, , , il s'ensuit
= 1, , ,
et ainsi est réalisable pour le problème original .
i
j ji i j j i i
j G j G
h i m
h x h x h x b i m
x P
α α∈ ∈
= …
≤ ≤ = …
∑ ∑� ��
�
( )( )
( ) Min
Sujet à 1, ,i i
n
P f x
h x b i m
x R
≤ =
∈Γ ⊂
…
est un ensemble convexe borné et , , 1, , sont desfonctions convexes sur
if h i mΓ =
Γ
…

iπ�
0π�
( )Pour démontrer que est optimale pour , nous nousappuyons sur la dualité forte linéaire et sur la dualité faiblelagrangienne.
x P�
( )
( ) ( )
01
01
Par la dualité forte linéaire, nous avons que
.
Ainsi puique est convexe, alors
mj
j i i
j G i
mj j
j j i i
j G j G i
f x b
f
f x f x f x b
α π π
α α π π
∈ =
∈ ∈ =
= − +
= ≤ = − +
∑ ∑
∑ ∑ ∑
� � �
� �� � �
( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…

iπ�
0π�
( )Pour démontrer que est optimale pour , nous nousappuyons sur la dualité forte linéaire et sur la dualité faiblelagrangienne.
x P�
[ ]( ) [ ]
T1 0
T1
Puisque , , , est une solution optimale du dual
linéaire de , il s'ensuit que , , 0.
m
G mRALP
π π π
π π ≥
� � �…
� �…
( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…

( )Considérant le dual lagrangien de :P
( ) ( )( )
Min
Sujet à 1, ,i i
n
P f x
h x b i m
x R
≤ =
∈Γ ⊂
…( ) ( )( )
0 1
Max Infm
i i ix
i
f x h x bλ
λ∈Γ≥
=
+ −
∑
[ ]( ) [ ]
T1 0
T1
Puisque , , , est une solution optimale du dual
linéaire de , il s'ensuit que , , 0.
m
G mRALP
π π π
π π ≥
� � �…
� �…
[ ]( )
T1il s'ensuit que , , 0 est une solution réalisable du dual
lagrangien de .m
P
π π ≥� �…
( )
( ) ( ) ( )( )
( ) ( )
1
1 1
Se référant au théorème de dualité lagrangienne faible, alors ˆpour toute solution de ,
ˆ Inf
Min
m
i i ix
i
m m
i i i ix
i i
x P
f x f x h x b
b f x h x
π
π π
∈Γ=
∈Γ= =
≥ + −
≥ − + +
∑
∑ ∑
�
� �

( ) ( ) ( )
( ) ( )
( ) ( )
1 1
01
01
01
par définition de
puisque par hypothèse du théorème
0
ou
m m
i i i i
i im
i i
im
i i
im
i i
i
b f x h x x
b
f x h x
f x h x
α α α
α α
α α
π π
π π
π π
π π
= =
=
=
=
≥ − + +
≥ − −
+ + ≥
+ ≥ −
∑ ∑
∑
∑
∑
� � �
� �
� �
� �
� �
� �
� �
( )
( ) ( ) ( )1 1
Se référant au théorème de dualité lagrangienne faible, alors ˆpour toute solution de ,
ˆ Minm m
i i i ix
i i
x P
f x b f x h xπ π∈Γ
= =
≥ − + +
∑ ∑� �
( )
( ) 01
puisque par la dualité linéaire fortem
i i
i
f x
f x bπ π=
≥
≤ − +
∑
�
� � �
( ) ( ) ( )ˆ ˆDonc pour toute solution réalisable de .f x f x x P≥ � �

Bornes sur la valeur optimale de (P)
( )*
À chaque itération du processus, nous engendrons des bornes
inférieure et supérieure sur la valeur optimale de .f P
( ) ( ) ( ) ( )0 01 1
En effet, même si le critère d'optimalité
Min 0,
n'est pas saisfait, la première partie du théorème précédent tientpour démontrer que
est
m m
i i i ix
i i
jj
j G
f x h x f x h x
x x
α απ π π π
α
∈Γ= =
∈
+ + = + + ≥
=
∑ ∑
∑
� �� � � �
��
( )réalisable pour .P

( ) ( ) ( ) ( )
( )
0 01 1
Si
Min 0,
alors
est solution optimale d
Théorèm
e
e:
.
m m
i i i ix
i i
jj
j G
f x h x f x h x
x x
P
α απ π π π
α
∈Γ= =
∈
+ + = + + ≥
=
∑ ∑
∑
� �� � � �
��
( ) Démontrons d'abord que est une solution réalisable
de à cause des hypothèses de convexité. En effet,
, 1, 0,
impliquent que puisque est conv
Preu
exe.
ve.
jj j j
j G j G
x
P
x x j G
x
α α α∈ ∈
= = ≥ ∈
∈Γ Γ
∑ ∑
�
� � ��
�
( ) ( )
( )
De plus, puisque est convexe pour tout 1, , , il s'ensuit
= 1, , ,
et ainsi est réalisable pour le problème original .
i
j ji i j j i i
j G j G
h i m
h x h x h x b i m
x P
α α∈ ∈
= …
≤ ≤ = …
∑ ∑� ��
�

( )*
À chaque itération du processus, nous engendrons des bornes
inférieure et supérieure sur la valeur optimale de .f P
( ) ( ) ( ) ( )0 01 1
En effet, même si le critère d'optimalité
Min 0,
n'est pas saisfait, la première partie du théorème précédent tientpour démontrer que
est
m m
i i i ix
i i
jj
j G
f x h x f x h x
x x
α απ π π π
α
∈Γ= =
∈
+ + = + + ≥
=
∑ ∑
∑
� �� � � �
��
( )réalisable pour .P
( )*Par conséquent .f f x≤ �

( )*
À chaque itération du processus, nous engendrons des bornes
inférieure et supérieure sur la valeur optimale de .f P
( )*Par conséquent .f f x≤ �
[ ]( ) [ ]
T1 0
T1
Également, puisque , , , est une solution optimale du dual
linéaire de , il s'ensuit que , , 0
m
G mRALP
π π π
π π ≥
� � �…
� �…
iπ�
0π�
( ) ( )( )
Min
Sujet à 1, ,i i
n
P f x
h x b i m
x R
≤ =
∈Γ ⊂
…
( ) ( )( )1
Max Infm
i i ixo
i
f x h x bλ
λ∈Γ≥
=
+ −
∑
[ ]( )
T1et ainsi , , 0 est une solution réalisable du dual
lagrangien de .m
P
π π ≥� �…
( ) ( )
( )
Min
Sujet à ; 1, ,
1
0 ;
jG j
j G
jj i i
j G
j
j G
j
RALP f x
h x b i m
j G
α
α
α
α
∈
∈
∈
− ≥ − =
− = −
≥ ∈
∑
∑
∑
…

( )*
À chaque itération du processus, nous engendrons des bornes
inférieure et supérieure sur la valeur optimale de .f P
( )*Par conséquent .f f x≤ �
[ ]( ) [ ]
T1 0
T1 0
Également, puisque , , , est une solution optimale du dual
linéaire de , il s'ensuit que , , , 0
m
G mRALP
π π π
π π π ≥
� � �…
� � �…
[ ]( )
T1et ainsi , , est une solution réalisable du dual
lagrangien de .m
P
π π� �…
( ) ( ) ( )
( ) ( )
1 1
*
1 1
Par conséquent
Min
m m
i i i i
i i
m m
i i i ix
i i
g b f x h x
b f x h x f
α απ π π
π π
= =
∈Γ= =
= − + +
= − + + ≤
∑ ∑
∑ ∑
� �� � �
� �

( )*Par conséquent .f f x≤ �
( ) ( ) ( )
( ) ( )
1 1
*
1 1
Par conséquent
Min
m m
i i i i
i i
m m
i i i ix
i i
g b f x h x
b f x h x f
α απ π π
π π
= =
∈Γ= =
= − + +
= − + + ≤
∑ ∑
∑ ∑
� �� � �
� �
( )
*
ˆ ˆAinsi, si et dénotent respectivement la valeur de la meilleuresolution de et celle de la meilleure solution de son dual rencontrées jusqu'ici lors de la résolution, alors
ˆˆ .
f g
P
g f f≤ ≤
( )De ceci découle le critère d'arrêt suivant pour identifier unesolution -optimale de :
ˆ ˆ .
P
f g
ε
ε− ≤

Convergence
Puisque le nombre de points nécessaires pour approximer par leur enveloppe convexe n'est pas nécessairement fini, ils'ensuit que la preuve basée sur la stratégie de restriction développée pour le cas
Γ
linéaire ne tient plus nécessairement!

Advantages
• Solve a sequence of restricted (smaller) problems
• Mechanism to verify if the optimal solution of restrictedproblem is optimal for the original problem: solving a
problem specified with the nice constraints
• Same mechanism generates additional variables to
modify the restricted problem and to get closer to the
original one

Advantage of the approach
• PRIMAL METHOD:
for any restricted problem
the optimal solution λi*, iεG
x = ∑ iεG λi* xi feasible for the original problem

[ ]
P.L. Jackson, D.F. Lynch, "Revised Dantzig-Wolfe Decomposition"
Mathematical Programming 39 (1987), 157-179
6 G.B. Dantzig, P. Wolfe,"Decomposition Principle for Linear
Programs", Operations Research 8 19( )60 ,101 110−

La méthode de Dantzig-Wolfe illustre bien une app
g
r
é
oc
né
he d
rati
e
résolut on de coio lon par " nnes".
Après avoir résolu une restriction du problème définie avec un
sous ensemble de variables (dont les indices sont dans ), le
mécanisme pour vérifier si la solution optimale de cette restriction
est en f
G
ait une solution optimale du problème défini à partir
des contraintes "faciles" à traiter.
génère du même coup de l'
Dans le cas où la solution n'est pas optimale pour le problème,
le mécanisme permettant
de définir une nouvelle variable dont l'introduction dans une
nouv
info
elle
rm
r
ation
estriction entrainera une meilleure valeur optimale.
Dans cette méthode, nous avons d'abord besoin d'identifier un
problème équivalent où la génération de colonnes s'appliquent.

Situations où l'approche de resolution avec "génération de colonnes"
peut devenir intéressante:
le problème à résoudre comporte un très grand nombre de variables
qu'il est difficile de déterminer à priori, mais qu'il est facile de générer
en solutionnant le sous problème définissant le mécanisme lorsqu'elles
deviennent pertinentes pour réduire la valeur de la fonction économique.
le sous problème utilisé comme mécanisme (pour vérifier si la
solution d'une restriction est effectivement une solution pour le
problème à résoudre) possède une structure permettant de le
résoudre "facilement"

References
• M. S. Bazaraa, J.J. Jarvis, H.D. Sherali, ‘LinearProgramming and Network Flows’, Third Edition, Wiley(2005).
• G.B. Dantzig, P. Wolfe, ‘Decomposition Principle for Linear Programs’, Operations Research 8 (1960), 101-111.
• A.M. Geoffrion, ‘Elements of Large Scale MathematicalProgramming, Part I: Concepts; Part II: Synthesis of Algorithms and Bibliography’,Management Science 16
(1970), 652-691.