E XPECTATION M AXIMIZATION M EETS S AMPLING IN M OTIF F INDING Zhizhuo Zhang.
Moving Frames,Variational Problems, &Geometric Curve Flows
Peter J. Olver
University of Minnesota
http://www.math.umn.edu/∼ olver
Case Western, October, 2009
Basic Notation
x = (x1, . . . , xp) — independent variables
u = (u1, . . . , uq) — dependent variables
uαJ = ∂Juα — partial derivatives
F (x, u(n)) = F ( . . . xk . . . uαJ . . . ) — differential function
G — transformation group acting on the space of independent
and dependent variables
Variational Problems
I[u ] =∫
L(x, u(n)) dx — variational problem
L(x, u(n)) — Lagrangian
Variational derivative — Euler-Lagrange equations: E(L) = 0
components: Eα(L) =∑
J
(−D)J∂L
∂uαJ
DkF =∂F
∂xk+
∑
α,J
uαJ,k∂F
∂uαJ— total derivative of F with respect to xk
Invariant Variational Problems
According to Lie, any G–invariant variational problem can be
written in terms of the differential invariants:
I[u ] =∫
L(x, u(n)) dx =∫
P ( . . . DKIα . . . ) ω
I1, . . . , I" — fundamental differential invariants
D1, . . . ,Dp — invariant differential operators
DKIα — differentiated invariants
ω = ω1 ∧ · · · ∧ ωp — invariant volume form
If the variational problem is G-invariant, so
I[u ] =∫
L(x, u(n)) dx =∫
P ( . . . DKIα . . . ) ω
then its Euler–Lagrange equations admit G as a symmetrygroup, and hence can also be expressed in terms of the differ-ential invariants:
E(L) $ F ( . . . DKIα . . . ) = 0
Main Problem:
Construct F directly from P .
(P. Griffiths, I. Anderson )
Planar Euclidean group G = SE(2)
κ =uxx
(1 + u2x)3/2
— curvature (differential invariant)
ds =√
1 + u2x dx — arc length
D =d
ds=
1√
1 + u2x
d
dx— arc length derivative
Euclidean–invariant variational problem
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Euler-Lagrange equations
E(L) $ F (κ,κs,κss, . . . ) = 0
Euclidean Curve Examples
Minimal curves (geodesics):
I[u ] =∫
ds =∫ √
1 + u2x dx
E(L) = −κ = 0=⇒ straight lines
The Elastica (Euler):
I[u ] =∫
12 κ
2 ds =∫ u2xx dx
(1 + u2x)5/2
E(L) = κss +12 κ
3 = 0=⇒ elliptic functions
General Euclidean–invariant variational problem
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Invariantized Euler–Lagrange expression
E(P ) =∞∑
n=0
(−D)n∂P
∂κnD =
d
ds
Invariantized Hamiltonian
H(P ) =∑
i>j
κi−j (−D)j ∂P
∂κi− P
General Euclidean–invariant variational problem
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Invariantized Euler–Lagrange expression
E(P ) =∞∑
n=0
(−D)n∂P
∂κnD =
d
ds
Invariantized Hamiltonian
H(P ) =∑
i>j
κi−j (−D)j ∂P
∂κi− P
General Euclidean–invariant variational problem
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Invariantized Euler–Lagrange expression
E(P ) =∞∑
n=0
(−D)n∂P
∂κnD =
d
ds
Invariantized Hamiltonian
H(P ) =∑
i>j
κi−j (−D)j ∂P
∂κi− P
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Euclidean–invariant Euler-Lagrange formula
E(L) = (D2 + κ2) E(P ) + κH(P ) = 0
The Elastica: I[u ] =∫
12 κ
2 ds P = 12 κ2
E(P ) = κ H(P ) = −P = − 12 κ2
E(L) = (D2 + κ2) κ + κ (− 12 κ2 )
= κss +12 κ
3 = 0
I[u ] =∫
L(x, u(n)) dx =∫
P (κ,κs,κss, . . . ) ds
Euclidean–invariant Euler-Lagrange formula
E(L) = (D2 + κ2) E(P ) + κH(P ) = 0
The Elastica: I[u ] =∫
12 κ
2 ds P = 12 κ2
E(P ) = κ H(P ) = −P = − 12 κ2
E(L) = (D2 + κ2) κ + κ (− 12 κ2 )
= κss +12 κ
3 = 0
Moving Frames
G — r-dimensional Lie group acting on M
Jn = Jn(M,p) — nth order jet bundle for
p-dimensional submanifolds N = {u = f(x)} ⊂M
z(n) = (x, u(n)) = ( . . . xi . . . uαJ . . . ) — coordinates on Jn
G acts on Jn by prolongation (chain rule)
Definition.
An nth order moving frame is a G-equivariant map
ρ = ρ(n) : V ⊂ Jn −→ G
Equivariance:
ρ(g(n) · z(n)) =
g · ρ(z(n)) left moving frame
ρ(z(n)) · g−1 right moving frame
Note: ρleft(z(n)) = ρright(z
(n))−1
Theorem. A moving frame exists in a neighborhoodof a point z(n) ∈ Jn if and only if G acts freelyand regularly near z(n).
• free — the only group element g ∈ G which fixes one point
z ∈M is the identity: g · z = z if and only if g = e.
• locally free — the orbits have the same dimension as G.
• regular — all orbits have the same dimension and intersect
sufficiently small coordinate charts only once
( )≈ irrational flow on the torus)
Geometric Construction
z
Oz
Normalization = choice of cross-section to the group orbits
Geometric Construction
z
Oz
K
k
Normalization = choice of cross-section to the group orbits
Geometric Construction
z
Oz
K
k
g = ρleft(z)
Normalization = choice of cross-section to the group orbits
Geometric Construction
z
Oz
K
k
g = ρright(z)
Normalization = choice of cross-section to the group orbits
The Normalization Construction
1. Write out the explicit formulas for theprolonged group action:
w(n)(g, z(n)) = g(n) · z(n)
=⇒ Implicit differentiation
2. From the components of w(n), choose r = dim Gnormalization equations :
w1(g, z(n)) = c1 . . . wr(g, z
(n)) = cr
3. Solve the normalization equations for the group parametersg = (g1, . . . , gr):
g = ρ(z(n)) = ρ(x, u(n))
The solution is the right moving frame.
4. Invariantization: substitute the moving frame formulas
g = ρ(z(n)) = ρ(x, u(n))
for the group parameters into the un-normalized components ofw(n) to produce a complete system of functionally independentdifferential invariants:
I(n)(x, u(n)) = ι(z(n)) = w(n)(ρ(z(n)), z(n)))
Euclidean plane curves G = SE(2)
Assume the curve is (locally) a graph:
C = {u = f(x)}
Write out the group transformations
y = x cosφ− u sinφ + a
v = x cosφ + u sinφ + b
w = R z + c
Prolong to Jn via implicit differentiationy = x cosφ− u sinφ + a v = x cosφ + u sinφ + b
vy =sinφ + ux cosφ
cosφ− ux sinφvyy =
uxx(cosφ− ux sinφ)
3
vyyy =(cosφ − ux sinφ )uxxx − 3u
2xx sinφ
(cosφ − ux sinφ )5
...
Choose a cross-section, or, equivalently a set of r = dimG = 3normalization equations:
y = 0 v = 0 vy = 0
Solve the normalization equations for the group parameters:
φ = − tan−1 ux a = −x + uux√
1 + u2xb =
xux − u√1 + u2x
The result is the right moving frame ρ : J1 −→ SE(2)
Substitute into the moving frame formulas for the group pa-rameters into the remaining prolonged transformation formulaeto produce the basic differential invariants:
vyy +−→ κ =uxx
(1 + u2x)3/2
vyyy +−→dκ
ds=
(1 + u2x)uxxx − 3uxu2xx
(1 + u2x)3
vyyyy +−→d2κ
ds2+ 3κ3 = · · ·
Theorem. All differential invariants are functions of thederivatives of curvature with respect to arc length:
κdκ
ds
d2κ
ds2· · ·
The invariant differential operators and invariant differentialforms are also substituting the moving frame formulas forthe group parameters:
Invariant one-form — arc length
dy = (cosφ− ux sinφ) dx +−→ ds =√
1 + u2x dx
Invariant differential operator — arc length derivative
d
dy=
1
cosφ− ux sinφ
d
dx+−→
d
ds=
1√
1 + u2x
d
dx
Euclidean Curves
x
e1
e 2
Left moving frame ρ̃(x, u(1)) = ρ(x, u(1))−1
ã = x b̃ = u φ̃ = tan−1 ux
R =1
√1 + u2x
(1 −uxux 1
)
= ( t n ) ã =
(xu
)
InvariantizationThe process of replacing group parameters in transformation
rules by their moving frame formulae is known asinvariantization.
The invariantization I = ι(F ) is the unique invariant functionthat agrees with F on the cross-section: I | K = F | K.
Invariantization respects algebraic operations, and providesa canonical projection that maps objects to their invari-antized counterparts.
ι :
Functions −→ Invariants
Forms −→ Invariant Forms
Differential
Operators−→
Invariant Differential
Operators
Fundamental differential invariants = invariantized jet coordinates
Hi(x, u(n)) = ι(xi) IαK(x, u(l)) = ι(uαK)
The constant differential invariants, coming from the movingframe normalizations, are known as the phantom invariants .The remaining non-constant differential invariants are thebasic invariants and form a complete system of functionallyindependent differential invariants.
Invariantization of differential functions:
ι [ F ( . . . xi . . . uαJ . . . ) ] = F ( . . . Hi . . . IαJ . . . )
Replacement Theorem:
If J is a differential invariant, then ι(J) = J .
J( . . . xi . . . uαJ . . . ) = J( . . . Hi . . . IαJ . . . )
The Infinite Jet Bundle
Jet bundles
M = J0 ←− J1 ←− J2 ←− · · ·
Inverse limitJ∞ = lim
n→∞Jn
Local coordinates
z(∞) = (x, u(∞)) = ( . . . xi . . . uαJ . . . )
=⇒ Taylor series
Differential Forms
Coframe — basis for the cotangent space T∗J∞:
• Horizontal one-forms
dx1, . . . , dxp
• Contact (vertical) one-forms
θαJ = duαJ −
p∑
i=1
uαJ,i dxi
Intrinsic definition of contact form
θ | j∞N = 0 ⇐⇒ θ =∑
AαJ θαJ
The Variational Bicomplex=⇒ Dedecker, Vinogradov, Tsujishita, I. Anderson, . . .
Bigrading of the differential forms on J∞:
Ω∗ =M
r,sΩr,s
r = # horizontal forms
s = # contact forms
Vertical and Horizontal Differentials
d = dH + dV
dH : Ωr,s −→ Ωr+1,s
dV : Ωr,s −→ Ωr,s+1
Vertical and Horizontal Differentials
F (x, u(n)) — differential function
dH F =p∑
i=1
(DiF ) dxi — total differential (gradient)
dV F =∑
α,J
∂F
∂uαJθαJ — first variation
dH (dxi) = dV (dx
i) = 0,
dH (θαJ ) =
p∑
i=1
dxi ∧ θαJ,i dV (θαJ ) = 0
Vertical and Horizontal Differentials
F (x, u(n)) — differential function
dH F =p∑
i=1
(DiF ) dxi — total differential (gradient)
dV F =∑
α,J
∂F
∂uαJθαJ — first variation
dH (dxi) = dV (dx
i) = 0,
dH (θαJ ) =
p∑
i=1
dxi ∧ θαJ,i dV (θαJ ) = 0
Vertical and Horizontal Differentials
F (x, u(n)) — differential function
dH F =p∑
i=1
(DiF ) dxi — total differential (gradient)
dV F =∑
α,J
∂F
∂uαJθαJ — first variation
dH (dxi) = dV (dx
i) = 0,
dH (θαJ ) =
p∑
i=1
dxi ∧ θαJ,i dV (θαJ ) = 0
Vertical and Horizontal Differentials
F (x, u(n)) — differential function
dH F =p∑
i=1
(DiF ) dxi — total differential (gradient)
dV F =∑
α,J
∂F
∂uαJθαJ — first variation
dH (dxi) = dV (dx
i) = 0,
dH (θαJ ) =
p∑
i=1
dxi ∧ θαJ,i dV (θαJ ) = 0
The Simplest Example
(x, u) ∈M = R2x — independent variable
u — dependent variable
Horizontal formdx
Contact (vertical) forms
θ = du− ux dx
θx = dux − uxx dx
θxx = duxx − uxxx dx
...
θ = du− ux dx, θx = dux − uxx dx, θxx = duxx − uxxx dx
Differential:
dF =∂F
∂xdx +
∂F
∂udu +
∂F
∂uxdux +
∂F
∂uxxduxx + · · ·
= (DxF ) dx +∂F
∂uθ +
∂F
∂uxθx +
∂F
∂uxxθxx + · · ·
= dH F + dV F
Total derivative:
DxF =∂F
∂x+
∂F
∂uux +
∂F
∂uxuxx +
∂F
∂uxxuxxx + · · ·
The Variational Bicomplex... ... ... ... ...
dV!
dV!
dV!
dV!
δ!
Ω0,3dH" Ω1,3
dH" · · ·dH" Ωp−1,3
dH" Ωp,3π
" F3
dV!
dV!
dV!
dV!
δ!
Ω0,2dH" Ω1,2
dH" · · ·dH" Ωp−1,2
dH" Ωp,2π
" F2
dV!
dV!
dV!
dV!
δ!
Ω0,1dH" Ω1,1
dH" · · ·dH" Ωp−1,1
dH" Ωp,1π
" F1
dV!
dV!
dV!
dV!
##
##$E
R→ Ω0,0dH" Ω1,0
dH" · · ·dH" Ωp−1,0
dH" Ωp,0
conservation laws Lagrangians PDEs (Euler–Lagrange) Helmholtz conditions
The Variational Bicomplex... ... ... ... ...
dV!
dV!
dV!
dV!
δ!
Ω0,3dH" Ω1,3
dH" · · ·dH" Ωp−1,3
dH" Ωp,3π
" F3
dV!
dV!
dV!
dV!
δ!
Ω0,2dH" Ω1,2
dH" · · ·dH" Ωp−1,2
dH" Ωp,2π
" F2
dV!
dV!
dV!
dV!
δ!
Ω0,1dH" Ω1,1
dH" · · ·dH" Ωp−1,1
dH" Ωp,1π
" F1
dV!
dV!
dV!
dV!
##
##$E
R→ Ω0,0dH" Ω1,0
dH" · · ·dH" Ωp−1,0
dH" Ωp,0
conservation laws Lagrangians PDEs (Euler–Lagrange) Helmholtz conditions
The Variational Bicomplex... ... ... ... ...
dV!
dV!
dV!
dV!
δ!
Ω0,3dH" Ω1,3
dH" · · ·dH" Ωp−1,3
dH" Ωp,3π
" F3
dV!
dV!
dV!
dV!
δ!
Ω0,2dH" Ω1,2
dH" · · ·dH" Ωp−1,2
dH" Ωp,2π
" F2
dV!
dV!
dV!
dV!
δ!
Ω0,1dH" Ω1,1
dH" · · ·dH" Ωp−1,1
dH" Ωp,1π
" F1
dV!
dV!
dV!
dV!
##
##$E
R→ Ω0,0dH" Ω1,0
dH" · · ·dH" Ωp−1,0
dH" Ωp,0
conservation laws Lagrangians PDEs (Euler–Lagrange) Helmholtz conditions
The Variational Bicomplex... ... ... ... ...
dV!
dV!
dV!
dV!
δ!
Ω0,3dH" Ω1,3
dH" · · ·dH" Ωp−1,3
dH" Ωp,3π
" F3
dV!
dV!
dV!
dV!
δ!
Ω0,2dH" Ω1,2
dH" · · ·dH" Ωp−1,2
dH" Ωp,2π
" F2
dV!
dV!
dV!
dV!
δ!
Ω0,1dH" Ω1,1
dH" · · ·dH" Ωp−1,1
dH" Ωp,1π
" F1
dV!
dV!
dV!
dV!
##
##$E
R→ Ω0,0dH" Ω1,0
dH" · · ·dH" Ωp−1,0
dH" Ωp,0
conservation laws Lagrangians PDEs (Euler–Lagrange) Helmholtz conditions
The Variational Bicomplex... ... ... ... ...
dV!
dV!
dV!
dV!
δ!
Ω0,3dH" Ω1,3
dH" · · ·dH" Ωp−1,3
dH" Ωp,3π
" F3
dV!
dV!
dV!
dV!
δ!
Ω0,2dH" Ω1,2
dH" · · ·dH" Ωp−1,2
dH" Ωp,2π
" F2
dV!
dV!
dV!
dV!
δ!
Ω0,1dH" Ω1,1
dH" · · ·dH" Ωp−1,1
dH" Ωp,1π
" F1
dV!
dV!
dV!
dV!
##
##$E
R→ Ω0,0dH" Ω1,0
dH" · · ·dH" Ωp−1,0
dH" Ωp,0
conservation laws Lagrangians PDEs (Euler–Lagrange) Helmholtz conditions
The Variational Derivative
E = π ◦ dV
dV — first variationπ — integration by parts = mod out by image of dH
Ωp,0 −→dV
Ωp,1 −→π
F1 = Ωp,1/ dH Ωp−1,1
λ = Ldx −→∑
α,J
∂L
∂uαJθαJ ∧ dx −→
q∑
α=1
Eα(L) θα ∧ dx
Variational
problem−→
First
variation−→
Euler–Lagrange
source form
The Simplest Example: (x, u) ∈M = R2
Lagrangian form: λ = L(x, u(n)) dx ∈ Ω1,0
First variation — vertical derivative:
dλ = dV λ = dV L ∧ dx
=
(∂L
∂uθ +
∂L
∂uxθx +
∂L
∂uxxθxx + · · ·
)
∧ dx ∈ Ω1,1
Integration by parts — compute modulo im dH :
dλ ∼ δλ =
(∂L
∂u−Dx
∂L
∂ux+ D2x
∂L
∂uxx− · · ·
)
θ ∧ dx ∈ F1
= E(L) θ ∧ dx
=⇒ Euler-Lagrange source form.
The Simplest Example: (x, u) ∈M = R2
Lagrangian form: λ = L(x, u(n)) dx ∈ Ω1,0
First variation — vertical derivative:
dλ = dV λ = dV L ∧ dx
=
(∂L
∂uθ +
∂L
∂uxθx +
∂L
∂uxxθxx + · · ·
)
∧ dx ∈ Ω1,1
Integration by parts — compute modulo im dH :
dλ ∼ δλ =
(∂L
∂u−Dx
∂L
∂ux+ D2x
∂L
∂uxx− · · ·
)
θ ∧ dx ∈ F1
= E(L) θ ∧ dx
=⇒ Euler-Lagrange source form.
The Simplest Example: (x, u) ∈M = R2
Lagrangian form: λ = L(x, u(n)) dx ∈ Ω1,0
First variation — vertical derivative:
dλ = dV λ = dV L ∧ dx
=
(∂L
∂uθ +
∂L
∂uxθx +
∂L
∂uxxθxx + · · ·
)
∧ dx ∈ Ω1,1
Integration by parts — compute modulo im dH :
dλ ∼ δλ =
(∂L
∂u−Dx
∂L
∂ux+ D2x
∂L
∂uxx− · · ·
)
θ ∧ dx ∈ F1
= E(L) θ ∧ dx
=⇒ Euler-Lagrange source form.
To analyze invariant variational problems,
invariant conservation laws, etc., we
apply the moving frame invariantization
process to the variational bicomplex:
The Invariant Variational Complex
=⇒ Joint work with Irina Kogan.
ι — invariantization associated with moving frame ρ.
• Fundamental differential invariants
Hi(x, u(n)) = ι(xi) IαK(x, u(n)) = ι(uαK)
• Invariant horizontal forms
+i = ι(dxi)
• Invariant contact forms
ϑαJ = ι(θαJ )
The Invariant Variational Complex
=⇒ Joint work with Irina Kogan.
ι — invariantization associated with moving frame ρ.
• Fundamental differential invariants
Hi(x, u(n)) = ι(xi) IαK(x, u(n)) = ι(uαK)
• Invariant horizontal forms
+i = ι(dxi)
• Invariant contact forms
ϑαJ = ι(θαJ )
The Invariant Variational Complex
=⇒ Joint work with Irina Kogan.
ι — invariantization associated with moving frame ρ.
• Fundamental differential invariants
Hi(x, u(n)) = ι(xi) IαK(x, u(n)) = ι(uαK)
• Invariant horizontal forms
+i = ι(dxi)
• Invariant contact forms
ϑαJ = ι(θαJ )
The Invariant Variational Complex
=⇒ Joint work with Irina Kogan.
ι — invariantization associated with moving frame ρ.
• Fundamental differential invariants
Hi(x, u(n)) = ι(xi) IαK(x, u(n)) = ι(uαK)
• Invariant horizontal forms
+i = ι(dxi)
• Invariant contact forms
ϑαJ = ι(θαJ )
The Invariant “Quasi–Tricomplex”
Differential formsΩ∗ =
M
r,sΩ̂r,s
Differentiald = dH + dV + dW
dH : Ω̂r,s −→ Ω̂r+1,s
dV : Ω̂r,s −→ Ω̂r,s+1
dW : Ω̂r,s −→ Ω̂r−1,s+2
Key fact: Invariantization and differentiation do not commute:
d ι(Ω) )= ι(dΩ)
The Universal Recurrence Formula
d ι(Ω) = ι(dΩ) +r∑
k=1
νk ∧ ι [vk(Ω)]
v1, . . . ,vr — basis for g — infinitesimal generators
ν1, . . . , νr — invariantized dual Maurer–Cartan forms
ν = κ+ + C(ϑ)
κ — Maurer–Cartan invariantsC — Maurer–Cartan operator
=⇒ uniquely determined by the recurrence formulae for thephantom differential invariants
d ι(Ω) = ι(dΩ) +r∑
k=1
νk ∧ ι [vk(Ω)]
. . . All identities, commutation formulae, syzygies, etc.,among differential invariants and, more generally,the invariant variational bicomplex follow from thisuniversal formula by letting Ω range over the basicfunctions and differential forms!
. . . Moreover, determining the structure of the differentialinvariant algebra and invariant variational bicomplexrequires only linear differential algebra, and not anyexplicit formulas for the moving frame, the differentialinvariants, the invariant differential forms, or the grouptransformations!
d ι(Ω) = ι(dΩ) +r∑
k=1
νk ∧ ι [vk(Ω)]
. . . All identities, commutation formulae, syzygies, etc.,among differential invariants and, more generally,the invariant variational bicomplex follow from thisuniversal formula by letting Ω range over the basicfunctions and differential forms!
. . . Moreover, determining the structure of the differentialinvariant algebra and invariant variational bicomplexrequires only linear differential algebra, and not anyexplicit formulas for the moving frame, the differentialinvariants, the invariant differential forms, or the grouptransformations!
Euclidean plane curves
Fundamental normalized differential invariants
ι(x) = H = 0
ι(u) = I0 = 0
ι(ux) = I1 = 0
phantom diff. invs.
ι(uxx) = I2 = κ ι(uxxx) = I3 = κs ι(uxxxx) = I4 = κss + 3κ3
In general:
ι( F (x, u, ux, uxx, uxxx, uxxxx, . . . )) = F (0, 0, 0,κ,κs,κss + 3κ3, . . . )
Invariant arc length form
dy = (cosφ− ux sinφ) dx − (sinφ) θ
+ = ι(dx) = ω + η
=√
1 + u2x dx +ux√
1 + u2xθ
=⇒ θ = du− ux dx
Invariant contact forms
ϑ = ι(θ) =θ
√1 + u2x
ϑ1 = ι(θx) =(1 + u2x) θx − uxuxxθ
(1 + u2x)2
Prolonged infinitesimal generators
v1 = ∂x, v2 = ∂u, v3 = −u ∂x + x ∂u + (1 + u2x) ∂ux + 3uxuxx ∂uxx + · · ·
Basic recurrence formula
dι(F ) = ι(dF ) + ι(v1(F )) ν1 + ι(v2(F )) ν
2 + ι(v3(F )) ν3
Use phantom invariants
0 = dH = ι(dx) + ι(v1(x)) ν1 + ι(v2(x)) ν
2 + ι(v3(x)) ν3 = + + ν1,
0 = dI0 = ι(du) + ι(v1(u)) ν1 + ι(v2(u)) ν
2 + ι(v3(u)) ν3 = ϑ + ν2,
0 = dI1 = ι(dux) + ι(v1(ux)) ν1 + ι(v2(ux)) ν
2 + ι(v3(ux)) ν3 = κ+ + ϑ1 + ν
3,
to solve for the Maurer–Cartan forms:
ν1 = −+, ν2 = −ϑ, ν3 = −κ+ − ϑ1.
ν1 = −+, ν2 = −ϑ, ν3 = −κ+ − ϑ1.
Maurer–Cartan invariants: κ = (−1, 0,−κ)
Recurrence formulae:
dκ = dι(uxx) = ι(duxx) + ι(v1(uxx)) ν1 + ι(v2(uxx)) ν
2 + ι(v3(uxx)) ν3
= ι(uxxx dx + θxx)− ι(3uxuxx) (κ+ + ϑ1) = I3+ + ϑ2.
Therefore, Dκ = κs = I3, dV κ = ϑ2 = (D2 + κ2)ϑ
where the final formula follows from the contact form recurrence formulae
dϑ = dι(θx) = + ∧ ϑ1, dϑ1 = dι(θ) = + ∧ (ϑ2 − κ2ϑ)− κϑ1 ∧ ϑ
which implyϑ1 = Dϑ, ϑ2 = Dϑ1 + κ
2 ϑ = (D2 + κ2)ϑ
Similarly,
d+ = ι(d2x) + ν1 ∧ ι(v1(dx)) + ν2 ∧ ι(v2(dx)) + ν
3 ∧ ι(v3(dx))
= (κ+ + ϑ1) ∧ ι(ux dx + θ) = κ+ ∧ ϑ + ϑ1 ∧ ϑ.
In particular,dV + = −κϑ ∧+
Key recurrence formulae:
dV κ = (D2 + κ2)ϑ dV + = −κ ϑ ∧+
Plane Curves
Invariant Lagrangian:
λ̃ = L(x, u(n)) dx = P (κ,κs, . . .) +
Euler–Lagrange form:dV λ̃ ∼ E(L)ϑ ∧+
Invariant Integration by Parts Formula
F dV (DH) ∧+ ∼ − (DF ) dV H ∧+ − (F · DH) dV +
dV λ̃ = dV P ∧+ + P dV +
=∑
n
∂P
∂κndV κn ∧+ + P dV +
∼ E(P ) dV κ ∧+ + H(P ) dV +
Vertical differentiation formulae
dV κ = A(ϑ) A — invariant variation operator
dV + = B(ϑ) ∧+ B — “Hamiltonian operator”
dV λ̃ ∼ E(P ) A(ϑ) ∧+ + H(P ) B(ϑ) ∧+
∼[A∗E(P )− B∗H(P )
]ϑ ∧+
Invariant Euler-Lagrange equation
A∗E(P )− B∗H(P ) = 0
Euclidean Plane Curves
dV κ = (D2 + κ2)ϑ
Invariant variation operator:
A = D2 + κ2 = A∗
dV + = −κ ϑ ∧+
Hamiltonian operator:
B = −κ = B∗
Euclidean–invariant Euler-Lagrange formula
E(L) = A∗E(P )− B∗H(P ) = (D2 + κ2) E(P ) + κH(P ).
Invariant Plane Curve Flows
G — Lie group acting on R2
C(t) — parametrized family of plane curves
G–invariant curve flow:
dC
dt= V = I t + J n
• I, J — differential invariants
• t — “unit tangent”
• n — “unit normal”
t, n — basis of the invariant vector fields dual to the invariantone-forms:
〈 t ;+ 〉 = 1, 〈n ;+ 〉 = 0,
〈 t ;ϑ 〉 = 0, 〈n ;ϑ 〉 = 1.
Ct = V = I t + J n
• The tangential component I t only affects the underlyingparametrization of the curve. Thus, we can set I to beanything we like without affecting the curve evolution.
• There are two principal choices of tangential component:
Normal Curve Flows
Ct = J n
Examples — Euclidean–invariant curve flows
• Ct = n — geometric optics or grassfire flow;
• Ct = κn — curve shortening flow;
• Ct = κ1/3 n — equi-affine invariant curve shortening flow:
Ct = nequi−affine ;
• Ct = κs n — modified Korteweg–deVries flow;
• Ct = κss n — thermal grooving of metals.
Intrinsic Curve Flows
Theorem. The curve flow generated by
v = I t + J n
preserves arc length if and only if
B(J) + D I = 0.
D — invariant arc length derivative
dV + = B(ϑ) ∧+
B — invariant Hamiltonian operator
Normal Evolution of Differential Invariants
Theorem. Under a normal flow Ct = J n,
∂κ
∂t= Aκ(J),
∂κs∂t
= Aκs(J).
Invariant variations:
dV κ = Aκ(ϑ), dV κs = Aκs(ϑ).
Aκ = A — invariant linearization operator of curvature;
Aκs = DAκ + κκs — invariant linearization operator of κs.
Euclidean–invariant Curve Evolution
Normal flow: Ct = J n
∂κ
∂t= Aκ(J) = (D
2 + κ2) J,
∂κs∂t
= Aκs(J) = (D3 + κ2D + 3κκs)J.
Warning : For non-intrinsic flows, ∂t and ∂s do not commute!
Grassfire flow: J = 1
∂κ
∂t= κ2,
∂κs∂t
= 3κκs, . . .
=⇒ caustics
Signature Curves
Definition. The signature curve S ⊂ R2 of a curve C ⊂ R2 is
parametrized by the two lowest order differential invariants
S =
{ (
κ ,dκ
ds
) }
⊂ R2
Equivalence and Signature Curves
Theorem. Two curves C and C are equivalent:
C = g · C
if and only if their signature curves are identical:
S = S
=⇒ object recognition
Euclidean Signature Evolution
Evolution of the Euclidean signature curve
κs = Φ(t,κ).
Grassfire flow:∂Φ
∂t= 3κΦ− κ2
∂Φ
∂κ.
Curve shortening flow:
∂Φ
∂t= Φ2Φκκ − κ
3Φκ + 4κ2Φ.
Modified Korteweg-deVries flow:
∂Φ
∂t= Φ3Φκκκ + 3Φ
2ΦκΦκκ + 3κΦ2.
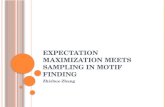
Canine Left Ventricle Signature
Original Canine HeartMRI Image
Boundary of Left Ventricle
Smoothed Ventricle Signature
10 20 30 40 50 60
20
30
40
50
60
10 20 30 40 50 60
20
30
40
50
60
10 20 30 40 50 60
20
30
40
50
60
-0.15 -0.1 -0.05 0.05 0.1 0.15 0.2
-0.06
-0.04
-0.02
0.02
0.04
0.06
-0.15 -0.1 -0.05 0.05 0.1 0.15 0.2
-0.06
-0.04
-0.02
0.02
0.04
0.06
-0.15 -0.1 -0.05 0.05 0.1 0.15 0.2
-0.06
-0.04
-0.02
0.02
0.04
0.06
Intrinsic Evolution of Differential Invariants
Theorem.
Under an arc-length preserving flow,
κt = R(J) where R = A− κsD−1B (∗)
In surprisingly many situations, (*) is a well-known integrable
evolution equation, and R is its recursion operator!
=⇒ Hasimoto
=⇒ Langer, Singer, Perline
=⇒ Maŕı–Beffa, Sanders, Wang
=⇒ Qu, Chou, Anco, and many more ...
Euclidean plane curves
G = SE(2) = SO(2) ! R2
dV κ = (D2 + κ2)ϑ, dV + = −κ ϑ ∧+
=⇒ A = D2 + κ2, B = −κ
R = A− κsD−1B = D2 + κ2 + κsD
−1 · κ
κt = R(κs) = κsss +32 κ
2κs
=⇒ modified Korteweg-deVries equation
Equi-affine plane curves
G = SA(2) = SL(2) ! R2
dV κ = A(ϑ), dV + = B(ϑ) ∧+
A = D4 + 53 κD2 + 53 κsD +
13 κss +
49 κ
2,
B = 13 D2 − 29 κ,
R = A− κsD−1B
= D4 + 53 κD2 + 43 κsD +
13 κss +
49 κ
2 + 29 κsD−1 · κ
κt = R(κs) = κ5s + 2κκss +43 κ
2s + +
59 κ
2 κs=⇒ Sawada–Kotera equation
Euclidean space curves
G = SE(3) = SO(3) ! R3
(dV κdV τ
)
= A
(ϑ1ϑ2
)
dV + = B
(ϑ1ϑ2
)
∧+
A =
D2s + (κ2 − τ2)
2τ
κD2s +
3κτs − 2κsτ
κ2Ds +
κτss − κsτs + 2κ3τ
κ2
−2τDs − τs
1
κD3s −
κsκ2
D2s +κ2 − τ2
κDs +
κsτ2 − 2κττsκ2
B = (κ 0 )
Recursion operator:
R = A−
(κsτs
)
D−1B
(κtτt
)
= R
(κsτs
)
=⇒ vortex filament flow
=⇒ nonlinear Schrödinger equation (Hasimoto)
Poisson Brackets
{ ·, · } : C∞(M, R)× C∞(M, R) −→ C∞(M, R)
Bilinear :
{ aF + bG, H } = a {F, H } + b {G, H }
{F, aG + bH } = a {F, G } + b {F, H }
Skew Symmetric:{F,H } = − {H, F }
Jacobi Identity :
{F, {G, H } } + {H, {F, G } } + {G, {H, F } } = 0
F,G, H ∈ C∞(M, R), a, b ∈ R.
Poisson Brackets
In coordinates z = (z1, . . . , zm),
{F, H } = ∇F TJ(z)∇H
where J(z)T = −J(z) is a skew symmetric matrix.
• The Jacobi identity imposes a system of quadraticallynonlinear partial differential equations on its entries Jij(z).
Symplectic Structure
A nondegenerate Poisson bracket
det J(z) )= 0
defines a symplectic structure, with symplectic 2–form
Ω = dzT J(z)−1 dz
Hamiltonian Flows
Given a Poisson structure, the Hamiltonian flow correspondingto H ∈ C∞(M, R) is the system of ordinary differentialequations
dz
dt= { z, H } = J(z)∇H
Canonical example:
z = (p, q) = (p1, . . . , pn, q1, . . . , qn) J(z) =
(O −II O
)
dp
dt= −
∂H
∂q
dq
dt=
∂H
∂p
Lie–Poisson Structure
g — r-dimensional Lie algebra
M = g∗ $ Rr — dual vector space
{F,H } = 〈 z ; [∇F (z),∇H(z) ] 〉
z ∈ g∗ F (z),H(z) ∈ C∞(g∗, R)
∇F (z) ∈ g [∇F (z),∇H(z) ] — Lie bracket in g
In coordinates: Jij(z) =r∑
k=1
ckijzk
ckij — structure constants
z = z1µ1 + · · · zrµ
r ∈ g∗
µ1, . . . , µr — Maurer–Cartan forms
Lie–Poisson Structure
g — r-dimensional Lie algebra
M = g∗ $ Rr — dual vector space
{F,H } = 〈 z ; [∇F (z),∇H(z) ] 〉
z ∈ g∗ F (z),H(z) ∈ C∞(g∗, R)
∇F (z) ∈ g [∇F (z),∇H(z) ] — Lie bracket in g
In coordinates: Jij(z) =r∑
k=1
ckijzk
ckij — structure constants
z = z1µ1 + · · · zrµ
r ∈ g∗
µ1, . . . , µr — Maurer–Cartan forms
Poisson Brackets on Curves
u(x) — parametrized curve in M = G/N
H[u ] =∫
H[u ] dx — Hamiltonian functional
Poisson bracket:
{F ,H} =∫ ( δF
δuPδH
δu
)
dx
P — skew-adjoint differential operator• Jacobi identity
Hamiltonian evolution
∂u
∂t= {u,H} = P
δH
δu
Korteweg–deVries Equation
∂u
∂t= uxxx + uux = P1
δH1δu
= P2δH2δu
P1 = Dx H1[u ] =∫
( 16 u3 − 12 u
2x ) dx
P2 = D3x +
23uDx +
13 ux H2[u ] =
∫( 12 u
2 ) dx
• Bi–Hamiltonian system with recursion operator
R = P2 · P−11 = D
2x +
23u +
13 ux D
−1x
. Magri’s Theorem establishes the integrability (under suitabletechnical hypotheses) of bi-Hamiltonian systems.
Deformed Lie–Poisson Structure
u(x) ∈ C∞(R, g∗) — curve in g∗
Poisson bracket:
{F ,H} =∫ ( δF
δuP
δH
δu
)
dx
Hamiltonian curve flow:
∂u
∂t= P
δH
δu= B Dx
δH
δu+ ad∗δH/δu(u)
B : g −→ g∗ — ad∗–invariant symmetric linear map
• If g is semi-simple, B is a multiple of the Killing form
Geometric Flows on Semi-Simple HomogeneousSpaces
=⇒ Joint work with Gloria Maŕı Beffa
From here on G is semi-simple and M = G/N .
We consider curve flows in M with fixed parametrization.
Let ρ : Jn → G be a left moving frame.
Maurer–Cartan invariants:
κ(u(n)) = ρ(u(n))−1Dxρ(u(n)) : Jn −→ g
Geometric curve flow∂u
∂t= J · n = J1n1 + · · · + Jmnm
Evolution of Maurer–Cartan invariants∂κ
∂t= A(J) = Q · C(J)
Poisson Reduction
Assuming g is semisimple, we use the Killing form to pull backthe Poisson structure on g∗ to g:
Q[v ] = B−1P[B v ], v ∈ C∞(R, g)
whereQ[v ] w = Dxw + [ v, w ]
We then replace v = κ(u(n)) using the Maurer–Cartan map topull back the Poisson flow to curves on M = G/N .
A remarkable fact is that the operator Q[κ ] is exactly theoperator appearing in the factorization of the Maurer–Cartanevolution
∂κ
∂t= A(J) = Q · C(J)
Moreover, the pulled back Maurer–Cartan forms have the form
ν = κ dx + C(ϑ)
Main questions:
• Does the pulled-back Poisson evolution of the Maurer–Cartaninvariants come from a geometric curve flow?
• Is the Maurer–Cartan flow Poisson?
Compatibility
Let κ1, . . . , κm be a generating system of differential invariants and assumethat they occur linearly in the Maurer–Cartan invariants:
κ = ϕ(κ) = A κ + b
Find R such thatδH
δκ[ϕ(κ) ] = B R
δH
δκThe reduced Poisson operator is
PR[κ ] = R∗P [B ϕ(κ) ]R
Compatibility condition M = G/N :
C(J) = RδH
δκ+ n for n ∈ n
Reduced Poisson Geometric Flow:
∂κ
∂t= PR
δH
δκ
Example
G = PSL(2) acting on M = R: u +−→αu + β
γ u + δ
Moving frame normalizations:
u→ 0, ux → 1, uxx → 0,
Generating differential invariant — the Schwarzian
κ = ι(uxxx) =2uxuxxx − 3u
2xx
u2x
Pulled back Maurer–Cartan forms
ν1 = −+ − ϑ, ν2 = −ϑx, ν3 = − 12 κ+ −
12 ϑxx −
12 κϑ.
Maurer–Cartan invariants and operator:
κ =
−10− 12 κ
C =
−1−D
− 12 D2 − 12 κ
Poisson operator on L g∗
P =
0 0 −10 12 0−1 0 0
Dx +
0 −L1 −2L2L1 0 −L12L2 L3 0
Pulled-back Poisson and Lie algebra operators
P =
0 −12 κ −Dx12 κ f2Dx −1−Dx 1 0
Q =
Dx −1 0κ Dx −20 12 κ Dx
Invariant linearization operator
A = Q · C =
00
− 12 (D3x + 2κDx + κx )
, R = −2 C =
2
2DxD2x + κ
Reduced Poisson operator = 2nd KdV structure:
PR = R∗ · P · R = −2 (D3x + 2κDx + κx)
Poisson flow:
κt = PRδh = −2 ( D3x + 2κDx + κx )
δh
δκ