A resposta livre não amortecida: m , kx = 0 para …... · = m 2 ⋅ kg/s 2 in.-lb f J = m ⋅ N =...
11
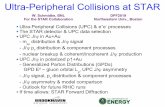
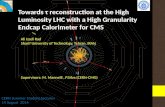
Resposta Livre de um Sistema de 1 Grau de Liberdade A resposta livre não amortecida: m ܬ+ kx = 0 para condições iniciais x(0) = x 0 , ܪ(0) = υ 0 Deslocamento, x(t) Fase 2 n Período Amplitude, A Máxima velocidade x 0 Desloca- mento inicial Tempo, t A resposta livre subamortecida: m ܬ+ c ܪ+ kx = 0 para condições iniciais x(0) = x 0 , ܪ(0) = υ 0 Tempo (s) Deslocamento (mm) 1,0 0,0 –1,0
Transcript of A resposta livre não amortecida: m , kx = 0 para …... · = m 2 ⋅ kg/s 2 in.-lb f J = m ⋅ N =...

Resposta Livre de um Sistema de 1 Grau de Liberdade
A resposta livre não amortecida: m + kx = 0 para condições iniciais x(0) = x0, (0) = υ0
Deslocamento, x(t)
Fase
2
n
Período
Amplitude, A
Máxima velocidade
x 0Desloca-
mento
inicialTempo, t
A resposta livre subamortecida: m + c + kx = 0 para condições iniciais x(0) = x0, (0) = υ0
Tempo (s)
Deslocamento (mm)
1,0
0,0
–1,0

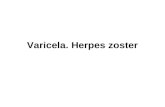
Resposta à Excitação Harmônica de um Sistema de 1 Grau de Liberdade
A resposta forçada de m + c + kx = 0 = F0 sen t é x(t) = X sen ( t + ) onde a amplitude
normalizada Xk/F0 é dada por ilustrada abaixo
3,0r
2,52,01,5
Razão de frequência
1,00,50,00,1
2
4
6
1
2
4
Am
pli
tude
norm
aliz
ada
6
10
2
4
0,01
0,02
0,1
0,2
1,0
0,75
XkF
0
e onde a fase é dada por tg ilustrada abaixo
1,0
0,5 0,1
2
Fase
Razão de Frequência
2,52,01,51,00,50,0
3,0
2,0
1,0
0,0

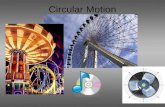
SISTEMA RETILÍNEO SISTEMA ROTACIONAL
UNIDADE UNIDADE
Grandeza Símbolo Padrão U.S. Unidades do S.I. Símbolo Inglês Unidades do S.I.
Tempo t sec s t sec sDeslocamento x in. m θ rad radVelocidade in./sec m/s rad/sec rad/s
Aceleração in./sec2 m/s2 rad/sec2 rad/s2
Massa, momento de inércia m lbf -sec2/in. kg J in.-lbf -sec2m2 ⋅ kg
Fator de amortecimento c lbf -sec/in. s ⋅ N/m c in.-lbf -sec/rad m ⋅ s ⋅ N/radConstante de mola k lbf /in. N/m k in.-lbf /rad m ⋅ N/radForça, torque F = m lbf N = m ⋅ kg/s2 in.-lbf m ⋅ N = m2 ⋅ kg/s2
Momento m lbf -sec s ⋅ N = m ⋅ kg/s in.-lbf -sec m2 ⋅ kg ⋅ rad/sImpulso Ft lbf -sec s ⋅ N Tt in.lbf -sec m2 ⋅ kg ⋅ rad/sEnergia cinética in.ibf J in.-lbf J
Energia potencial in.ibf J in.-lbf J
Trabalho in.ibf J = m ⋅ N= m2 ⋅ kg/s2
in.-lbf J = m ⋅ N= m2 ⋅ kg/s2
Frequência natural rad/secHz
rad/sHz
rad/secHz
rad/sHz
UNIDADES
GRANDEZA SISTEMA INGLÊS SISTEMA S.I.
força 1 lb 4,448 quilogramas (N)massa 1 lb ⋅ sec2/ft (slug) 14,59 quilograma
comprimento 1 ft 0,3048 metros (m)densidade slug/ft3 515,38 kg/m3
torque ou momento 1 lb ⋅ in 0,113 N ⋅ maceleração 1 ft/sec2 0,3048 m/s2
aceleração da gravidade 32,2 ft/sec2 = 386 in./sec2 9,81 m/s2
constante da mola k 1 lb/in 175,1 N/mconstante da mola torcional k 1 lb ⋅ in./rad 0,113 N ⋅ m/radconstante de amortecimento c 1 lb ⋅ sec/in. 175,1 N ⋅ s/mmomento de inércia de massa 1 lb.in.sec2 0,1129 kg/m2
módulo de elasticidade 106 lb.in.2 6,895 × 109 N/m2
módulo de elasticidade de aço 29 × 106 lb/in.2 200 × 109 N/m2
ângulo 1 degree 157,3 radiano
PREFIXOS NO S.I.
FATOR DE MULTIPLICAÇÃO PREFIXO SÍMBOLO
1 000 000 000 000 = 1012 tera T1 000 000 000 = 109 giga G
1 000 000 = 106 mega M1 000 = 103 kilo k100 = 102 hecto h10 = 10 deca da
0,1 = 10–1 deci d0,01 = 10–2 centi c
0,001 = 10–3 milli m0,000 001 = 10–6 micro µ
0,000 000 001 = 10–9 nano n0,000 000 000 001 = 10–12 pico p
Grandezas Físicas, Unidades e Símbolos

1
1 Introdução à Vibração e a Resposta Livre
A vibraçã o é o ramo da dinâmica que lida com
movimentos repetitivos. A maioria dos exemplos neste
livro envolve vibração em mecanismos ou estruturas.
No entanto, a vibração é preponderante em sistemas
biológicos e é, na verdade, a fonte de comunicação
(o ouvido vibra para ouvirmos, enquanto a língua e
as cordas vocais vibram para falarmos). No caso da
música, as vibrações, por exemplo, de um instrumento
de cordas como uma guitarra, são desejadas. Por outro
lado, na maioria dos sistemas e estruturas mecânicas,
a vibração é indesejada e, até mesmo, destrutiva.
Por exemplo, a vibração na estrutura de um avião
causa fadiga e pode, eventualmente, levar à falha.
Um exemplo de trinca por fadiga é ilustrado no círculo
desenhado na foto de baixo ao lado. Atividades
cotidianas são cheias de exemplos de vibração e,
normalmente, formas de atenuá-la. Automóveis, trens
e, até mesmo, algumas bicicletas possuem dispositivos
para reduzir a vibração provocada pelo movimento e
transmitida ao condutor.
O objetivo deste livro é ensinar o leitor a analisar
a vibração usando os princípios da dinâmica, o que
requer o uso da matemática. Na verdade, a função
seno fornece os meios fundamentais de análise dos
fenômenos de vibração.
Os conceitos básicos de compreensão, análise e
previsão do comporta mento de sistemas vibratórios
formam os tópicos deste livro. Os conceitos e
formulações apresentados nos próximos capítulos
destinam-se a oferecer as competências necessárias
para projetar sistemas vibratórios com propriedades
que aumentam as vibrações quando desejado e as
reduzem quando não.
Este primeiro capítulo estuda a vibração em sua
forma mais simples, na qual nenhuma força externa
está presente (vibração livre). Este capítulo introduz o
importante conceito de frequência natural e como
modelar de forma matemática a vibração.
A internet é uma grande fonte de exemplos de
vibração e o leitor é encorajado a procurar por fil mes
de sistemas vibratórios e outros exemplos disponíveis
nessa fonte.

117
2 Resposta à Excitação Harmônica
Este ca pítulo dedica-se ao conceito
mais importante em análise de vibrações:
o conceito de ressonância.
A ressonância ocorre quando uma força
externa periódica é aplicada a um
sistema com uma frequência natural
igual à frequência da força de excitação.
Em geral, isso ocorre quando a força
de excitação é proveniente de alguma
máquina ou mecanismo rotativo, como
o helicóptero mostrado na foto. A lâmina
rotativa faz com que uma força harmônica
seja aplicada ao corpo do helicóptero.
Se a frequência de rotação da lâmina
corresponde à frequência natural do
corpo, a ressonância ocorrerá conforme
descrito na Seção 2.1. A ressonância
causa grandes deflexões, que podem
exceder os limites elásticos e fazer com
que a estrutura falhe. Um exemplo familiar
para a maioria é a ressonância causada
por uma roda desbalanceada em um
carro (segunda foto). A velocidade angular
da roda corresponde à frequência de
excitação. A uma certa velocidade, a roda
desbalanceada causa ressonância, que é
sentida pela trepidação do volante. Se o
carro se move mais lentamente, ou mais
rapidamente, a frequência afasta-se da
condição de ressonância e a trepidação
é interrompida.

216
3 Resposta à Forçada Geral
Este c apítulo começa com a resposta de sistemas
submetidos a carga de impacto ou impulso. Um
exemplo de tal carga ocorre durante o pouso de um
avião. O trem de pouso da aeronave, ilustrado na
foto de cima ao lado, possui rigidez e amortecimento
projetados (ver Capítulo 5) para atenuar o efeito do
impacto na aeronave. A entrada para a estrutura
não é completamente periódica, como analisado
no Capítulo 2, mas tem impacto aleatório e outros
componentes, como discutido neste capítulo.
Outra fonte de vibração que não está em uma
única frequência (como no Capítulo 2) é o coração
humano. O coração vibra em uma variedade de
frequências diferentes, dependendo do nível de
atividade e estado emocional da pessoa. Alguns
corações precisam de regulação usando um
dispositivo como o marca-passo, retratado na foto.
Esses dispositivos funcionam com baterias, que
precisam ser substituídas a cada sete a dez anos,
envolvendo grande cirurgia. Pesquisadores de
vibração desenvolveram recentemente dispositivos
de captura de energia que convertem as vibrações
induzidas pelo coração, na cavidade torácica, em
energia elétrica. Essa energia é então utilizada para
recarregar a bateria do marca-passo. A colocação de
tal dispositivo no interior do marca-passo requer uma
compreensão básica da vibração e, em particular dos
modelos, da resposta de vibração de uma estrutura
(colhedora, nesse caso) à entradas que têm energia
em muitas frequências diferentes, como discutido
neste capítulo.

303
4 Sistemas com Múltiplos Graus de Liberdade
Este capítulo introduz a análise necessária
para entender a vibração de sistemas com
mais de um grau de liberdade. O número
de graus de liberdade de um sistema é
determinado pelo número de partes móveis
e pelo número de direções nas quais cada
parte pode se mover. Mais de um grau de
liberdade significa mais de uma frequência
natural, aumentando consideravelmente a
possibilidade de ocorrer ressonância. Este
capítulo também introduz o importante
conceito de forma modal e o método
largamente utilizado de análise modal para
estudar a resposta de sistemas de múltiplo
graus de liberdade (MGDL). A maioria das
estruturas são modeladas como sistemas
MGDL. A suspensão do veículo off-road
mostrada na foto é um exemplo de um
sistema que pode ser modelado como
dois ou mais graus de liberdade. Projetistas
precisam ser capazes de prever a resposta
de vibração, a fim de melhorar o conforto
e garantir a durabilidade. As lâminas de
um motor a jato representadas na segunda
foto também requerem análise MGDL, mas
com um número muito maior de graus de
liberdade. Aviões, satélites, automóveis etc.,
fornecem exemplos de sistemas vibratórios
bem modelados pela análise MGDL
introduzida neste capítulo.

435
5 Projeto para Redução de Vibração
Este capítulo apresenta as técnicas úteis em projeto
de estruturas e máquinas para que vibrem o menos
possível. Frequentemente, isso acontece depois que
um produto é projetado e o protótipo é fabricado e
testado. Em muitos casos, problemas de vibração
são encontrados no final do processo então, muitas
vezes, é necessário refazer o projeto. Neste capítulo
são introduzidos os conceitos de isolamento de
vibração e absorção de vibração, fundamentais
no projeto de vibração. Também são introduzidas a
otimização como ferramenta de projeto, a adição de
amortecimento e o conceito de velocidades críticas
em máquinas rotativas.
O amortecedor de cabos utilizados nas linhas
elétricas, ilustrado na foto de cima ao lado, é utilizado
para reduzir o assobio do cabo causado pela
vibração provocada por ventos moderados e impedir
que os fios se toquem quando os cabos vibram em
ventos fortes (ou ressonância). As ideias introduzidas
no capítulo são fundamentais para o projeto de tais
dispositivos. Os cabos são modelados no Capítulo 6.
O sistema de suspensão de qualquer veículo
terrestre é um exemplo de um problema de projeto
comum. Um sistema mola-amortecedor de um
veículo off-road é mostrado na foto de baixo ao lado.
O tamanho, a massa de um veículo e as condições
da estrada afetam a capacidade do sistema de
suspensão em desempenhar a sua função de isolar
os passageiros das vibrações provocadas pelas
condições da estrada e velocidade.

502
6 Sistemas de Parâmetros Distribuídos
Até agora, este livro se dedicou a vibração
de corpos rígidos. Este capítulo apresenta a
análise necessária para descrever a vibração de
sistemas que possuem componentes flexíveis. A
flexibilidade dos componentes estruturais surge
quando as propriedades de massa e rigidez
são modeladas como sendo distribuídas (ou
contínuas) ao longo do componente em vez de
concentradas (ou discretas), como realizado no
Capítulo 4. Exemplos de tais sistemas são as asas
e painéis de aeronaves como o Reaper mostrado
na foto de cima ao lado. As vibrações da asa
de um avião comercial normalmente podem ser
vistas durante a decolagem e aterrissagem ou
durante uma turbulência. As pás da turbina eólica,
mostrada na foto, formam outro exemplo de um
sistema de parâmetros distribuídos. O aumento
da dependência da energia eólica tem exigido
pás de turbinas eólicas maiores e, portanto, mais
flexíveis. Muitas estruturas, como asas, lâminas
e outros componentes, podem ser modeladas
pelos modelos simples de cordas, vigas e placas
discutidos neste capítulo. Muitos sistemas, tais
como chassis de caminhão, prédios, pistas de
dança e unidades de disco de computador,
podem ser modelados e analisados pelos
métodos apresentados no capítulo. O conceito
principal apresentado aqui é que os sistemas de
parâmetros distribuídos têm um número infinito
de frequências naturais. Os conceitos de formas
modais e análise modal usados no Capítulo 4
são estendidos aqui para tratar a vibração de
sistemas de parâmetros distribuídos.

573
7 Teste de Vibração e Análise Modal Experimental
Este capítulo apresenta métodos de teste
e medição úteis para a obtenção de
modelos experimentais de uma variedade
de dispositivos e estruturas. O analisador
ilustrado recebe sinais analógicos de
transdutores (acelerômetros e martelos de
impacto) montados em uma estrutura,
digitaliza os sinais e os transforma no
domínio da frequência para análise.
Todo o processo é controlado por um
computador pessoal. Um esquema de
tal configuração de teste é apresentado
mais adiante na Figura 7.1. A foto de baixo
ao lado exibe o uso de um vibrômetro
a laser para medir a velocidade sem
ser montado fisicamente no objeto de
teste (componente de satélite). A Seção
7.1 descreve o hardware de medição
e o restante do capítulo é dedicado
aos métodos de análise dos dados. Em
particular, discute-se o método de análise
modal.

V I B R A Ç Õ E S M E C Â N I C A ST R A D U Ç Ã O D A 4 ª E D I Ç Ã O
D A N I E L J . I N M A N
Vibrações Mecânicas é um livro que aborda a teoria e os princípios fundamentais de vibrações, utilizando exclusivamente o Sistema Internacional de Unidades (SI). Além disso, o livro contém:
mais de 100 exemplos ilustrativos para ajudar o leitor a aprender os fundamentos e entender os conceitos por trás de problemas que possuem grande variedade de soluções possíveis;
vários exemplos com os códigos desenvolvidos nos programas MATLAB®, Mathematica® e Mathcad® para
compreensão dos conceitos fundamentais de vibração;
capítulo para testar a capacidade do leitor em aplicar os conhecimentos estudados;
exercícios destinados a serem resolvidos usando programas computacionais, do qual o leitor pode optar por utilizar o MATLAB®, o Mathematica®, o Mathcad®, ou até mesmo outro programa disponível;
mais de 30 problemas para serem resolvidos com o pacote Engineering Vibration Toolbox desenvolvido para o programa MATLAB® pelo próprio autor.
Os exemplos ilustrativos e os problemas propostos enfatizam a análise, bem como projeto e síntese.