Long wave modeling. - Boussinesq equations; motivation and...
34
Long wave modeling. Boussinesq equations; motivation and derivation MEK4320 Geir Pedersen Department of Mathematics, UiO December 5, 2014 Geir Pedersen Boussinesq
Transcript of Long wave modeling. - Boussinesq equations; motivation and...

Long wave modeling.
Boussinesq equations; motivation and derivationMEK4320
Geir Pedersen
Department of Mathematics, UiO
December 5, 2014
Geir Pedersen Boussinesq
Primitive and general hydrodynamicequations
Geir Pedersen Boussinesq
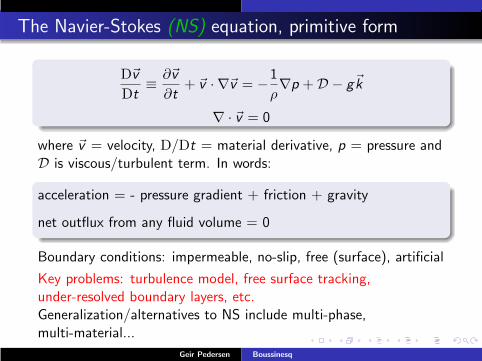
The Navier-Stokes (NS) equation, primitive form
D~v
Dt≡
∂~v
∂t+ ~v · ∇~v = −
1
ρ∇p +D − g~k
∇ · ~v = 0
where ~v = velocity, D/Dt = material derivative, p = pressure andD is viscous/turbulent term. In words:
acceleration = - pressure gradient + friction + gravity
net outflux from any fluid volume = 0
Boundary conditions: impermeable, no-slip, free (surface), artificial
Key problems: turbulence model, free surface tracking,under-resolved boundary layers, etc.Generalization/alternatives to NS include multi-phase,multi-material...
Geir Pedersen Boussinesq
Applicability of primitive models
General, but inaccurate, free surface techniques (VOF, SPH...)
Industrial (CFX, Fluent...) and open-source (OpenFoam)solvers
Computations readily become very heavy ⇒ numericalsolutions are under-resolved or unattainable
Thin wall boundary layers; cannot be resolved
Feasible only in local and idealized studies
The burden of the computations often lead to wavering of thephysics ?
Analytic solutions are sparse, circumstantial and cumbersome
Surprisingly (?) little insight in hydrodynamic wave theory yetstem from “full computational models”.
Simplified theories are still crucial, but general models
become increasingly important
Geir Pedersen Boussinesq
Full potential theory
Non-rotational motion ⇒ potential φ: ∇φ ≡ ~v
∇2φ = 0 for − h < z < η
Free surface (z = η) (DDt
= ∂/∂t + ~v · ∇)
∂φ
∂t+
1
2(∇φ)2 + gη = 0,
Dη
Dt=
∂φ
∂z
Bottom (z = −h)Dh
Dt= 0 ⇒
∂φ
∂n= 0
Surface waves often well described.
Geir Pedersen Boussinesq
Potential flow models
1 Integral equation discretized by panels. Boundary locationupdated in time as part of the method.
2 FFT techniques; approximations at free surface
Not incorporable: viscous effects, turbulence, overturning waves,Coriolis force...Computation still heavy. Useful for local simulations and forassessing validity of simpler models.More efficient and robust models must be employed for large scalemodeling
Geir Pedersen Boussinesq
Approximative theories
Geir Pedersen Boussinesq
Basis of approximations; Scales for surface gravity waves
Acceleration scaleg acceleration of gravityRemark: scale for particle acceleration in gravity waves is alwaysthe same, regardless of size of problem
Length scalesλ wavelength h depth A amplitude (η)Lh depth variations Lλ variation of λ, A...
Often Lh ∼ Lλ
Velocity and time scalesMay be built from length and acceleration scales
Geir Pedersen Boussinesq
Approximations; Regimes
Ah, Aλ≪ 1 ⇒ linear and weakly non-linear theories
λh≪ 1 ⇒ deep water
hλ≪ 1 ⇒ shallow water; long wave theory
hLh, λLλ
≪ 1 ⇒ multiple scale methods: ray theory; narrowband (nearly uniform waves)
Different requirements may be combined; long wave theory is oftencombined with weak non-linearity.
Definition of characteristic scales may be vague or ambiguous
Geir Pedersen Boussinesq
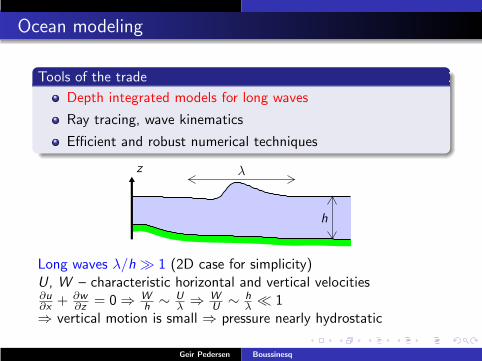
Ocean modeling
Tools of the trade
Depth integrated models for long waves
Ray tracing, wave kinematics
Efficient and robust numerical techniques
z λ
h
Long waves λ/h ≫ 1 (2D case for simplicity)U, W – characteristic horizontal and vertical velocities∂u∂x
+ ∂w∂z
= 0 ⇒ Wh
∼ Uλ⇒ W
U∼ h
λ≪ 1
⇒ vertical motion is small ⇒ pressure nearly hydrostatic
Geir Pedersen Boussinesq
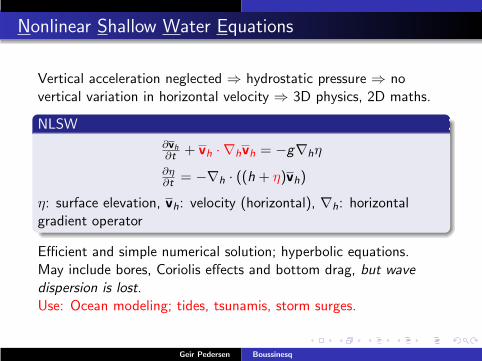
Nonlinear Shallow Water Equations
Vertical acceleration neglected ⇒ hydrostatic pressure ⇒ novertical variation in horizontal velocity ⇒ 3D physics, 2D maths.
NLSW
∂vh∂t
+ vh · ∇hvh = −g∇hη
∂η∂t
= −∇h · ((h + η)vh)
η: surface elevation, vh: velocity (horizontal), ∇h: horizontalgradient operator
Efficient and simple numerical solution; hyperbolic equations.May include bores, Coriolis effects and bottom drag, but wavedispersion is lost.Use: Ocean modeling; tides, tsunamis, storm surges.
Geir Pedersen Boussinesq

Dispersive long wave models
Models developed by perturbation/iteration/series expansion,assuming smallǫ ≡ (H/λ)2 and α ≡ A/H, where H is typical depth.Leading pressure modifications by vertical accelerations included.Huge diversity in in formulations and accuracy
Boussinesq type models
1880→ Theoretical applications (KdV...)
1966 first numerical Boussinesq models put to use
1990→ new formulations, increased validity range
Increase of computer power ⇒ large scale models feasible
Important for some tsunami features
Important model for coastal engineering
A step toward more general models from (N)LSW;assessment of dispersion effects
Geir Pedersen Boussinesq

Derivation of Boussinesq equations
Geir Pedersen Boussinesq
Antagelser/krav.
Lange bølger pa grunt vann.
Ikke-lineære bølger.
2-D forplantning.
Langsom variasjon av dyp.
Skalering
1 Et typisk dyp, H, brukes for skalering av “vertikale“ størrelser(z , h, w , η).
2 En typisk bølgelengde, ℓ, brukes for skalering av horisontalestørrelser (u, x , t).
3 Feltstørrelser skaleres i tillegg med en faktor, α, som er et malfor amplituden.
Langbølgeutvikling forutsetter
ǫ ≡H2
ℓ2≪ 1 (1)
Geir Pedersen Boussinesq
Dimensjonering
z⋆ = Hz , x⋆ = ℓx , t⋆ = ℓ(gH)−12 t,
h⋆ = Hh(x), η⋆ = αHη, u⋆ = α(gH)12 u,
w⋆ = ǫ12α(gH)
12w , p⋆ = ρgHp,
Skalerte likninger.Randbetingelser
p = 0, ηt + αuηx = w , ved z = αηw = −hxu ved z = −h
(2)
Eulers bevegelseslikninger:
ut + αuux + αwuz = −α−1px (3)
ǫ(wt + αuwx + αwwz) = −α−1(pz − 1) (4)
og kontinuitetslikningen:
ux + wz = 0 (5)
Geir Pedersen Boussinesq
Strategi
1 Gruntvannslikninger utledes ⇒ trykk tlnærmet hydrostatisk,u ≈ u = dybdemiddel (u nesten uniform i vertikalen).
2 Gitt punkt 1: Kontlikning + randbet. ⇒ w uttrykt ved z , ηog u.
3 Uttrykk for w innsatt likning for z-momentum ⇒ p uttryktved z , η og u. Korreksjon til hydrostatikk.
4 Insetting i horisontal momentumlikning og integrasjon overvæskedyp ⇒ Dybde-integrert momentumlikning.
Andre teknikker: Direkte rekke-utviklinger i z ...
Geir Pedersen Boussinesq
Hydrostatisk teori.
Alle ledd av orden ǫ sløyfes.Fra z-komponent av bev.likn:
p = αη − z + O(αǫ) (6)
x-komponent av bevegelseslikningen:
Du
Dt= −ηx + O(ǫ) = funksjon(x) + O(ǫ)
Akselerasjon uniform i z til O(ǫ) ⇒
uz = O(ǫ) (7)
Likninger i kompendium gjenskapes
ut + αuux = −ηx + O(ǫ)
ηt = −{(h + αη)u}x
Geir Pedersen Boussinesq
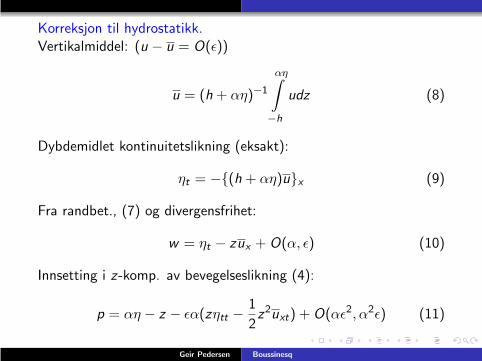
Korreksjon til hydrostatikk.Vertikalmiddel: (u − u = O(ǫ))
u = (h + αη)−1
αη∫
−h
udz (8)
Dybdemidlet kontinuitetslikning (eksakt):
ηt = −{(h + αη)u}x (9)
Fra randbet., (7) og divergensfrihet:
w = ηt − zux + O(α, ǫ) (10)
Innsetting i z-komp. av bevegelseslikning (4):
p = αη − z − ǫα(zηtt −1
2z2uxt) + O(αǫ2, α2ǫ) (11)
Geir Pedersen Boussinesq
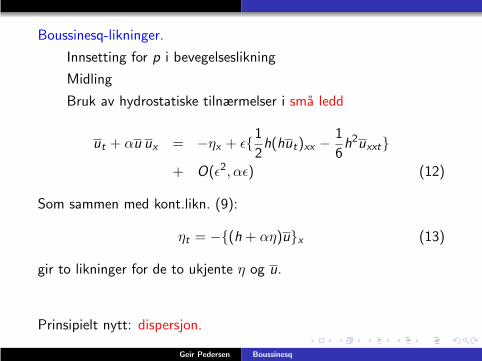
Boussinesq-likninger.
Innsetting for p i bevegelseslikning
Midling
Bruk av hydrostatiske tilnærmelser i sma ledd
ut + αu ux = −ηx + ǫ{1
2h(hut)xx −
1
6h2uxxt}
+ O(ǫ2, αǫ) (12)
Som sammen med kont.likn. (9):
ηt = −{(h + αη)u}x (13)
gir to likninger for de to ukjente η og u.
Prinsipielt nytt: dispersjon.
Geir Pedersen Boussinesq
More on Boussinesq type equations
Geir Pedersen Boussinesq

Depth integrated theory; Boussinesq
Boussinesq equations with 2 horizontal dimensions
∂vh∂t
+ αvh · ∇hvh = −∇hη + ǫ(
12h∇h∇h · (h
∂vh∂t
)− 16h2∇h∇h ·
∂vh∂t
)
−ǫκh2(∇3hη +∇h∇h ·
∂vh∂t
)+O(ǫ2, αǫ)
∂η∂t
= −∇h · ((h + αη)vh)
Derivation as with 1 horizontal dimension.Blue term =O(ǫ2, ǫα): optimization of dispersion propertiesNumerical solution much heavier than for shallow water eq. –implicit solution strategy needed. Still, much faster to solv thanprimitive equations. Wave dispersion included.
Geir Pedersen Boussinesq

The zα formulation
Popular formulation from Nwogu, later extended by others(Kennedy, Kirby, Wu, Liu, Lynett..)Velocity profile
~v = ~vs + ǫ(zα∇h
∂η
∂t−
1
2z2α∇h∇h · ~v∗) + O(ǫ2),
~vs = surface velocity, ~v∗ velocity at any depth.Velocity at zα(x , y)v(x , y , t) ≡ ~v(x , y , zα(x , y), t),used as unknown. Optimization of disperson on flat bottom ⇒zα = −0.531hExtra nonlinearities, O(ǫα), may be kept in derivation.
zα not related to nonlinear parameter α
Geir Pedersen Boussinesq
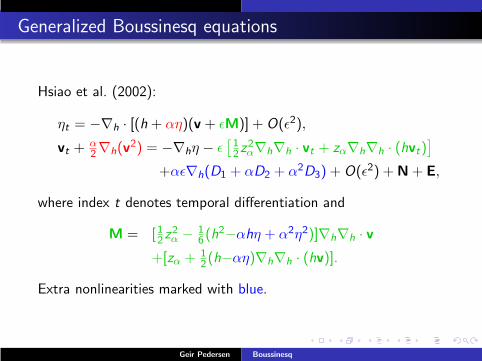
Generalized Boussinesq equations
Hsiao et al. (2002):
ηt = −∇h · [(h + αη)(v + ǫM)] + O(ǫ2),
vt +α2∇h(v
2) = −∇hη − ǫ[
12z2α∇h∇h · vt + zα∇h∇h · (hvt)
]
+αǫ∇h(D1 + αD2 + α2D3) + O(ǫ2) +N+ E,
where index t denotes temporal differentiation and
M = [12z2α − 1
6(h2−αhη + α2η2)]∇h∇h · v
+[zα + 12(h−αη)∇h∇h · (hv)].
Extra nonlinearities marked with blue.
Geir Pedersen Boussinesq

Furthermore...
D1 = η∇ · (hvt)−12z2αv · ∇∇v − zαv · ∇∇ · (hv)− 1
2(∇ · (hv))2,
D2 =12η2∇ · vt + ηv∇∇ · (hv)− η∇ · (hv)∇ · v,
D3 =12η2
[
v · ∇∇ · v − (∇ · v)2]
,
E = H−1∇h(ν(x , y , t)∇h(Hv),
N = −αµKH|v|v.
Unsystematic terms:E is dissipation term for capturing of breaking wavesN is bottom drag.Programs freely available on WEB (Funwave and Coulwave).There are issues with these equations
Geir Pedersen Boussinesq
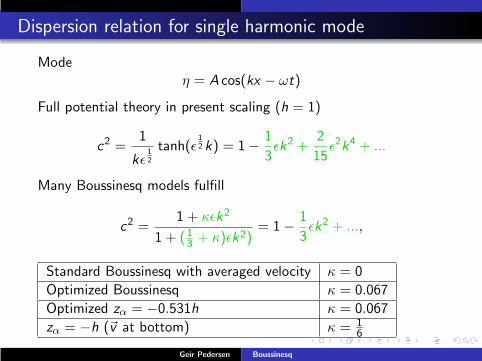
Dispersion relation for single harmonic mode
Modeη = A cos(kx − ωt)
Full potential theory in present scaling (h = 1)
c2 =1
kǫ12
tanh(ǫ12 k) = 1−
1
3ǫk2 +
2
15ǫ2k4 + ...
Many Boussinesq models fulfill
c2 =1 + κǫk2
1 + (13+ κ)ǫk2)
= 1−1
3ǫk2 + ...,
Standard Boussinesq with averaged velocity κ = 0
Optimized Boussinesq κ = 0.067
Optimized zα = −0.531h κ = 0.067
zα = −h (~v at bottom) κ = 16
Geir Pedersen Boussinesq

Dispersion properties
Exact
κ = 0
κ = 0.067
κ = 16
KdV
λ/h
cg
κ = 16→ u at bottom, κ = 0 → averaged u,
κ = 0.067 → optimal choicecg = dω/dk – group velocity
Geir Pedersen Boussinesq

Effect of dispersion
full pot stand B.
opt B.
x
η
Evolution from short initial elevationBlack: half the initial condition, width ∼ 3 depthsFront: Good agreement for all Boussinesq formulationsRear: Improved model superior, standard B. too dispersive
Observe: No corresponding improvement for steep bottomgradients
Geir Pedersen Boussinesq
Utledning av KdV likninger.
Geir Pedersen Boussinesq
Antagelser
Lange bølger – som for Boussinesq-likninger
Svakt ikke-lineære bølger. (α ∼ ǫ)
Ensretting: bølgeforplantning bare i positiv x-retning
Strategier
1 Klatter sammen ikke-lineært ledd fra hydrostatisk teori ogledd avledet fra den lineære dispersjonsrelasjonen.
2 Innfører koordinatsystem som beveger seg med lineærgruntvanns-hastighet ⇒ For ensrettede bølger vil alt endre seglangsomt i tiden.
3 Finne korreksjoner pa likningene for Riemann-invarianteneinnenfor rammen av Boussinesq-likningene.
Velger alternativ 2
Geir Pedersen Boussinesq
Boussinesq-likninger for h = 1.
ηt = −{(1 + αη)u}x (14)
ut + αu ux = −ηx + ǫ1
3uxxt (15)
α, ǫ → 0 ⇒
η = F (x − t) + G (x + t),
u = F (x − t)− G (x + t)
Bølger i positiv x-retning ⇒ G ≡ 0 og
ηt + ηx = 0, ut + ux = 0 (16)
Dvs. standard transportlikning.
Finnes det generaliseringer av (16) som inneholder korreksjoner tilO(α, ǫ) ?
Geir Pedersen Boussinesq
UtgangspunktFor sma α, ǫ er ikke-linearitet og dispersjon svake.Form varierer svakt, fasehastighet nær 1.Løsning endrer seg lite nar vi beveger oss med hastighet 1.
Koordinatskifteξ = x − t τ = ǫt (17)
τ er en langsom variabel.
Innsetting i kontinuitetslikning, (14):
ǫητ − ηξ = −(1 + αη)uξ − αuηξ (18)
Eliminasjon av u
Ledende orden: ηξ = uξ + O(α, ǫ). Dvs:
η = u + O(α, ǫ) (19)
hvis feks. η = u = 0 for x = ∞.Geir Pedersen Boussinesq
Vi kvitter oss med mest mulig u i (18) vha. (19):
ǫητ − ηξ = −uξ − 2αηηξ + O(ǫ2, αǫ) (20)
Innsetting i bev.likn. (15) med u = η i sma ledd ⇒
uξ = ηξ + ǫητ + αηηξ +1
3ǫηξξξ + O(ǫ2, αǫ) (21)
Innsetting i kont.likn. (20) ⇒ KdV likningen:
ǫητ +3
2αηηξ +
1
6ǫηξξξ = O(ǫ2, αǫ) (22)
TilbaketransformasjonGjeninnføres x og t :
ηt + (1 +3
2αη)ηx +
1
6ǫηxxx = O(ǫ2, αǫ) (23)
Eller; ηt = ηx + O(α, ǫ)⇒
ηt + (1 +3
2αη)ηx −
1
6ǫηxxt = O(ǫ2, αǫ) (24)
Geir Pedersen Boussinesq
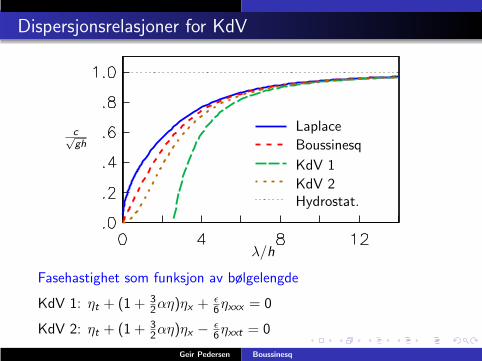
Dispersjonsrelasjoner for KdV
Laplace
Boussinesq
KdV 1
KdV 2Hydrostat.
λ/h
c√gh
Fasehastighet som funksjon av bølgelengde
KdV 1: ηt + (1 + 32αη)ηx +
ǫ6ηxxx = 0
KdV 2: ηt + (1 + 32αη)ηx −
ǫ6ηxxt = 0
Geir Pedersen Boussinesq
What is gained by long wave theory
1 Physical contents more transparent
2 Important closed form solutions of NLSW and the KdVequations
3 NLSW equations are hyperbolic with characteristics andshocks
4 Unknown upper bound of fluid replaced by coefficients in η
5 The number of dimensions reduced by 1 (depth integration)
Last two points crucial for numerical solution
Geir Pedersen Boussinesq