Logisticki modelˇ Definicija modela 1.3. LOGISTICKI MODELˇ … · 2014-11-07 · Logisticki...
85
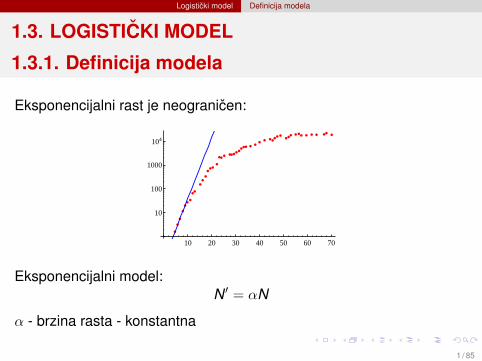
Logistiˇ cki model Definicija modela 1.3. LOGISTI ˇ CKI MODEL 1.3.1. Definicija modela Eksponencijalni rast je neograniˇ cen: 10 20 30 40 50 60 70 10 100 1000 10 4 Eksponencijalni model: N 0 = αN α - brzina rasta - konstantna 1 / 85
Transcript of Logisticki modelˇ Definicija modela 1.3. LOGISTICKI MODELˇ … · 2014-11-07 · Logisticki...
Logisticki model Definicija modela
1.3. LOGISTICKI MODEL
1.3.1. Definicija modela
Eksponencijalni rast je neogranicen:
10 20 30 40 50 60 70
10
100
1000
104
Eksponencijalni model:N ′ = αN
α - brzina rasta - konstantna
1 / 85
Logisticki model Definicija modela
Ideja - brzina rasta promjenjljiva:
N ′ = g(N)N
Za N = 0, g(0) = α
Za N = C nema rasta→ g(C) = 0.
C - razina zasicenosti (engl. carrying capacity)
Najjednostavnija funkcija g koja zadovoljava
g(0) = α i g(C) = 0
je
g(N) = α
(1− N
C
)
2 / 85
Logisticki model Definicija modela
Logisticki model:
N ′ = α
(1− N
C
)N
Parametri modela: α, C
Alternativni zapis modela:
N ′ = aN − bN2
3 / 85
Logisticki model Definicija modela
Pierre Francois Verhulst
1804, Bruxelles, Belgija (tada Francusko carstvo) - 1849, Bruxelles,Belgija
Belgijski statisticar i demograf. Radio na rastu populacije.
P.F. Verhulst (1845) Recherches mathématiques sur la loid´accroissement de la population. Nouv. mém. de l´Académie Royaledes Sci. et Belles-Lettres de Bruxelles 18:1–41.
Verhulstov model.4 / 85
Logisticki model Definicija modela
Logisticki model - naziv dao Verhulst (1845) bez objašnjenja (courbelogistique) nacrtavši je zajedno s courbe logarithmique(eksponencijalnom krivuljom)
Sljedecih godina model nije znacajnije korišten.
Ponovno otkriven 1920. godine
Raymond Pearl (1879–1940)
Lowell J. Reed (1886–1966)
Pearl, R. and L. J. Reed (1920). On the rate of growth of the populationof the United States since 1870 and its mathematical representation.Proceedings of the National Academy of Sciences 6, 275–288.
Kemijske lancane reakcije: Wilhelm Ostwald, Njemacka, 1883.
Statistika - logit model/transformacija, Joseph Berkson, SAD,(1899–1982)
5 / 85
Logisticki model Definicija modela
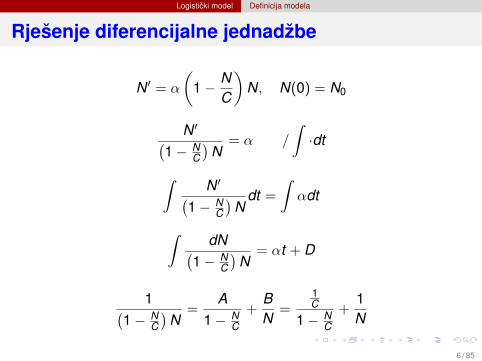
Rješenje diferencijalne jednadžbe
N ′ = α
(1− N
C
)N, N(0) = N0
N ′(1− N
C
)N
= α /
∫·dt
∫N ′(
1− NC
)N
dt =
∫αdt
∫dN(
1− NC
)N
= αt + D
1(1− N
C
)N
=A
1− NC
+BN
=1C
1− NC
+1N
6 / 85

Logisticki model Definicija modela
∫ 1C dN
1− NC
+
∫dNN
= αt + D
ln N − ln(
1− NC
)= αt + D
lnN
1− NC
= αt + D
N1− N
C
= eαt+D = D eαt
N =D eαt
1 + DC eαt
7 / 85
Logisticki model Definicija modela
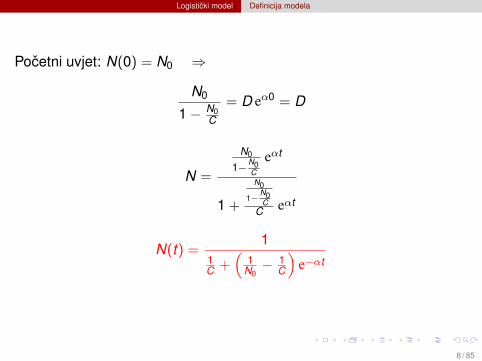
Pocetni uvjet: N(0) = N0 ⇒
N0
1− N0C
= D eα0 = D
N =
N0
1−N0C
eαt
1 +
N0
1−N0C
C eαt
N(t) =1
1C +
(1
N0− 1
C
)e−αt
8 / 85
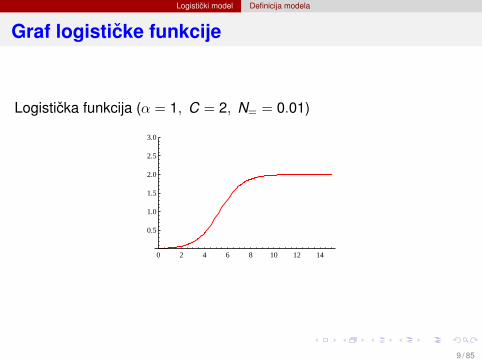
Logisticki model Definicija modela
Graf logisticke funkcije
Logisticka funkcija (α = 1, C = 2, N= = 0.01)
0 2 4 6 8 10 12 14
0.5
1.0
1.5
2.0
2.5
3.0
9 / 85
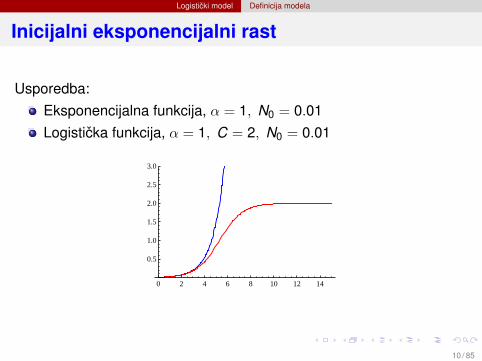
Logisticki model Definicija modela
Inicijalni eksponencijalni rast
Usporedba:Eksponencijalna funkcija, α = 1, N0 = 0.01Logisticka funkcija, α = 1, C = 2, N0 = 0.01
0 2 4 6 8 10 12 14
0.5
1.0
1.5
2.0
2.5
3.0
10 / 85
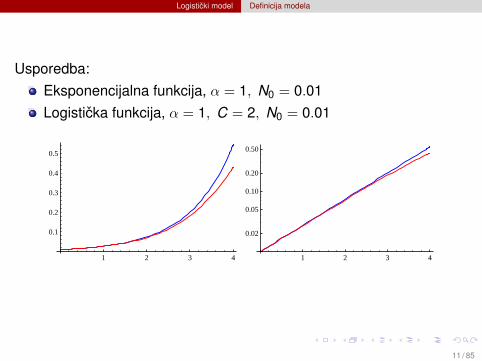
Logisticki model Definicija modela
Usporedba:Eksponencijalna funkcija, α = 1, N0 = 0.01Logisticka funkcija, α = 1, C = 2, N0 = 0.01
1 2 3 4
0.1
0.2
0.3
0.4
0.5
1 2 3 4
0.02
0.05
0.10
0.20
0.50
11 / 85
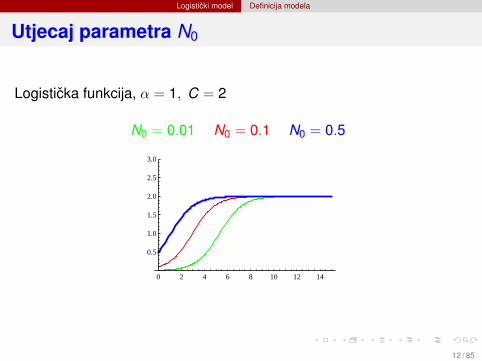
Logisticki model Definicija modela
Utjecaj parametra N0
Logisticka funkcija, α = 1, C = 2
N0 = 0.01 N0 = 0.1 N0 = 0.5
0 2 4 6 8 10 12 14
0.5
1.0
1.5
2.0
2.5
3.0
12 / 85
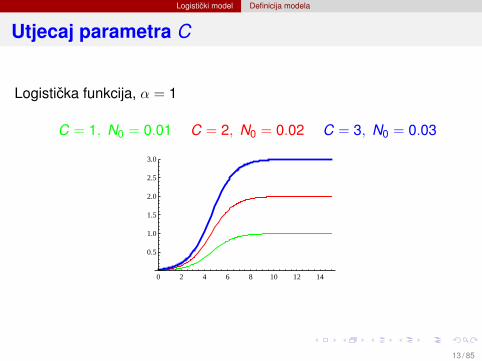
Logisticki model Definicija modela
Utjecaj parametra C
Logisticka funkcija, α = 1
C = 1, N0 = 0.01 C = 2, N0 = 0.02 C = 3, N0 = 0.03
0 2 4 6 8 10 12 14
0.5
1.0
1.5
2.0
2.5
3.0
13 / 85
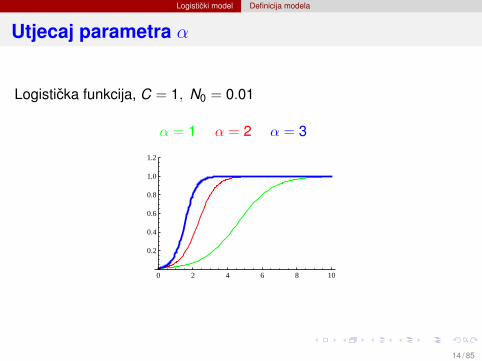
Logisticki model Definicija modela
Utjecaj parametra α
Logisticka funkcija, C = 1, N0 = 0.01
α = 1 α = 2 α = 3
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1.0
1.2
14 / 85
Logisticki model Definicija modela
3. Domaca zadaca.Izvedite logisticki model iz Taylorovog razvoja funkcije prirasta koristeciaproksimaciju polinomom treceg stupnja.
Predaja domace zadace: SUTRA.
15 / 85
Logisticki model Ekvilibrij
1.3.2. Ekvilibrij.
ZadatakFunkcija g(y) = g1− y/C nije jedina funkcija koja zadovoljava uvjetef (C) = 0.Odredite tri razlicite funkcije g koje zadovoljavaju g(1) = 0.
16 / 85
Logisticki model Ekvilibrij
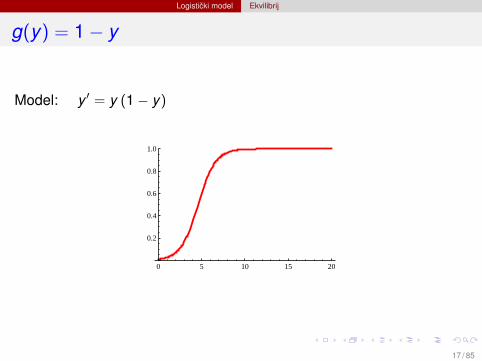
g(y) = 1− y
Model: y ′ = y (1− y)
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
17 / 85
Logisticki model Ekvilibrij
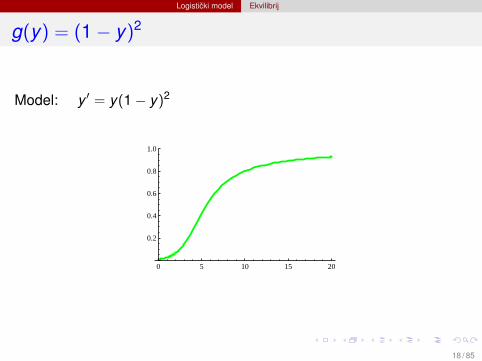
g(y) = (1− y)2
Model: y ′ = y(1− y)2
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
18 / 85
Logisticki model Ekvilibrij
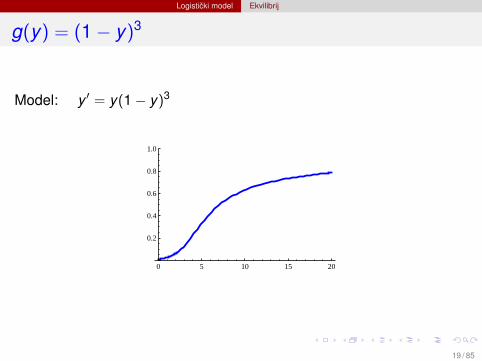
g(y) = (1− y)3
Model: y ′ = y(1− y)3
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
19 / 85
Logisticki model Ekvilibrij
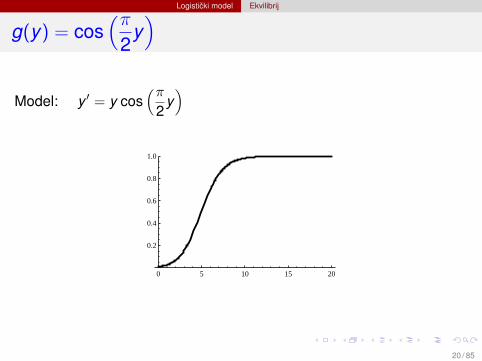
g(y) = cos(π
2y)
Model: y ′ = y cos(π
2y)
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
20 / 85
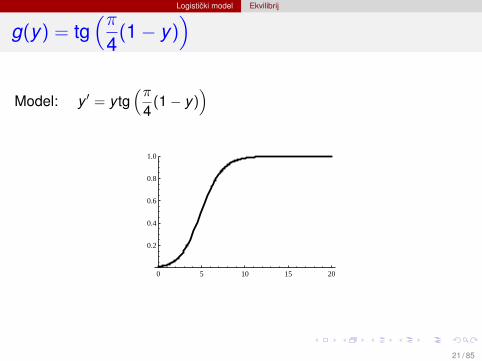
Logisticki model Ekvilibrij
g(y) = tg(π
4(1− y)
)
Model: y ′ = y tg(π
4(1− y)
)
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
21 / 85

Logisticki model Ekvilibrij
g(y) =sh(1− y)
sh1
Model: y ′ = ysh(1− y)
sh1
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
22 / 85
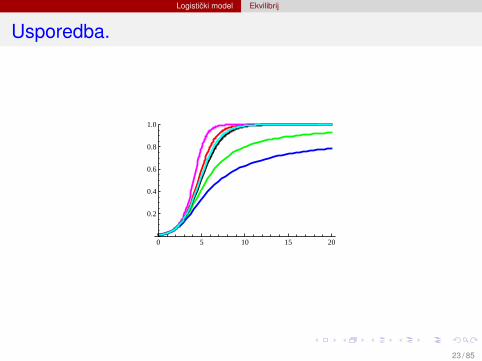
Logisticki model Ekvilibrij
Usporedba.
0 5 10 15 20
0.2
0.4
0.6
0.8
1.0
23 / 85
Logisticki model Ekvilibrij
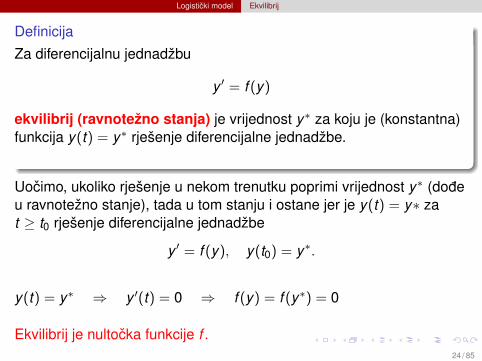
DefinicijaZa diferencijalnu jednadžbu
y ′ = f (y)
ekvilibrij (ravnotežno stanja) je vrijednost y∗ za koju je (konstantna)funkcija y(t) = y∗ rješenje diferencijalne jednadžbe.
Uocimo, ukoliko rješenje u nekom trenutku poprimi vrijednost y∗ (dodeu ravnotežno stanje), tada u tom stanju i ostane jer je y(t) = y∗ zat ≥ t0 rješenje diferencijalne jednadžbe
y ′ = f (y), y(t0) = y∗.
y(t) = y∗ ⇒ y ′(t) = 0 ⇒ f (y) = f (y∗) = 0
Ekvilibrij je nultocka funkcije f .24 / 85
Logisticki model Ekvilibrij
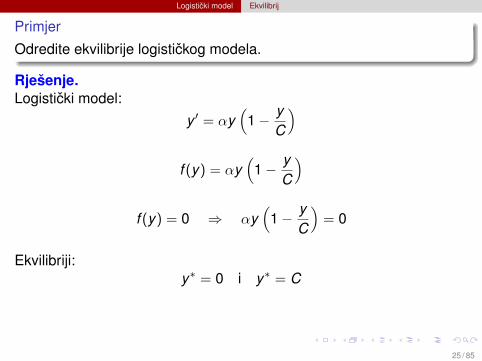
Primjer
Odredite ekvilibrije logistickog modela.
Rješenje.Logisticki model:
y ′ = αy(
1− yC
)f (y) = αy
(1− y
C
)f (y) = 0 ⇒ αy
(1− y
C
)= 0
Ekvilibriji:y∗ = 0 i y∗ = C
25 / 85
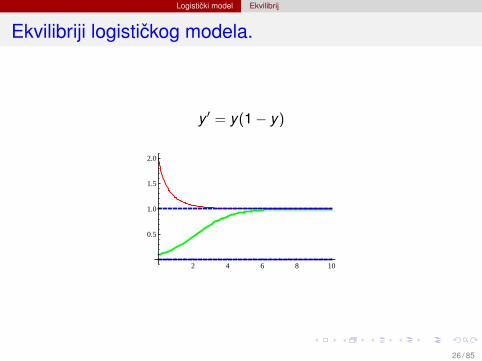
Logisticki model Ekvilibrij
Ekvilibriji logistickog modela.
y ′ = y(1− y)
2 4 6 8 10
0.5
1.0
1.5
2.0
26 / 85
Logisticki model Ekvilibrij
Stabilnost ekvilibrija.
Stabilnost ekvilibrija - nakon pomaka, sustav se vrac u ekvilibrij
Globalno stabilan ekvilibrij - nakon svakog pomaka, sustav se vraca uekvilibrij
Lokalno stabilan ekvilibrij - nakon malog pomaka, sustav se vraca uekvilibrij
27 / 85
Logisticki model Ekvilibrij
DefinicijaEkvilibrij y∗ je globalno stabilan ako za svaki y0 rješenjediferencijalne jednadžbe
y ′ = f (y), y(t0) = y0
zadovoljavalim
t→∞y(t) = y ∗ .
DefinicijaEkvilibrij y∗ je lokalno stabilan ako postoji okolina od y∗ tako da zasvaki y0 iz te okoline rješenje diferencijalne jednadžbe
y ′ = f (y), y(t0) = y0
zadovoljavalim
t→∞y(t) = y ∗ .
28 / 85
Logisticki model Ekvilibrij
PrimjerIspitajte stabilnost ekvilibrija eksponencijalnog modela
y ′ = −αy ,
gdje je α > 0.
Rješenje.
f (y) = −αyf (y) = 0 ⇒ −αy = 0 ⇒ y = 0
Ekvilibrij. y∗ = 0Rješenje: y(t) = y0 e−αt
Stabilnost:lim
t→∞y(t) = lim
t→∞y0 e−αt = 0
za sve y0.
Ekvilibrij je stabilan29 / 85
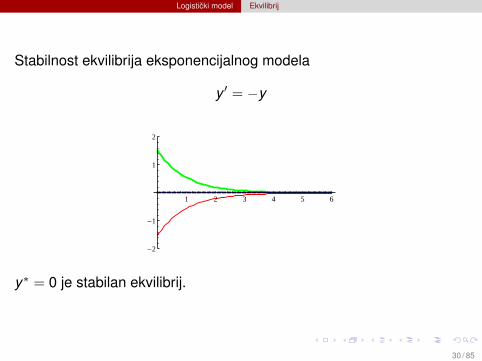
Logisticki model Ekvilibrij
Stabilnost ekvilibrija eksponencijalnog modela
y ′ = −y
1 2 3 4 5 6
-2
-1
1
2
y∗ = 0 je stabilan ekvilibrij.
30 / 85
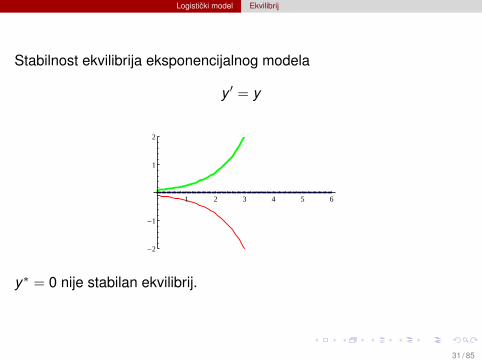
Logisticki model Ekvilibrij
Stabilnost ekvilibrija eksponencijalnog modela
y ′ = y
1 2 3 4 5 6
-2
-1
1
2
y∗ = 0 nije stabilan ekvilibrij.
31 / 85
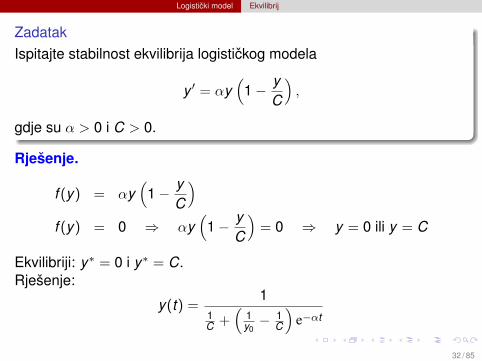
Logisticki model Ekvilibrij
ZadatakIspitajte stabilnost ekvilibrija logistickog modela
y ′ = αy(
1− yC
),
gdje su α > 0 i C > 0.
Rješenje.
f (y) = αy(
1− yC
)f (y) = 0 ⇒ αy
(1− y
C
)= 0 ⇒ y = 0 ili y = C
Ekvilibriji: y∗ = 0 i y∗ = C.Rješenje:
y(t) =1
1C +
(1y0− 1
C
)e−αt
32 / 85
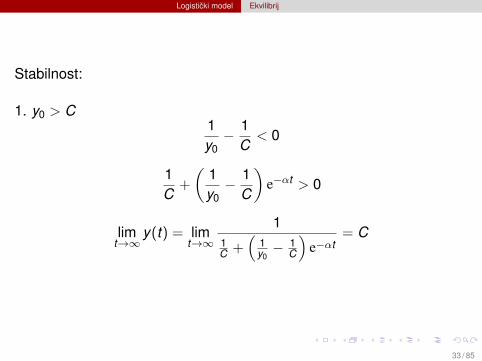
Logisticki model Ekvilibrij
Stabilnost:
1. y0 > C1y0− 1
C< 0
1C
+
(1y0− 1
C
)e−αt > 0
limt→∞
y(t) = limt→∞
11C +
(1y0− 1
C
)e−αt
= C
33 / 85
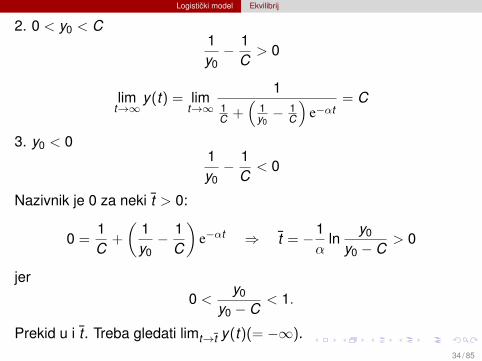
Logisticki model Ekvilibrij
2. 0 < y0 < C1y0− 1
C> 0
limt→∞
y(t) = limt→∞
11C +
(1y0− 1
C
)e−αt
= C
3. y0 < 01y0− 1
C< 0
Nazivnik je 0 za neki t > 0:
0 =1C
+
(1y0− 1
C
)e−αt ⇒ t = −1
αln
y0
y0 − C> 0
jer0 <
y0
y0 − C< 1.
Prekid u i t . Treba gledati limt→t y(t)(= −∞).34 / 85
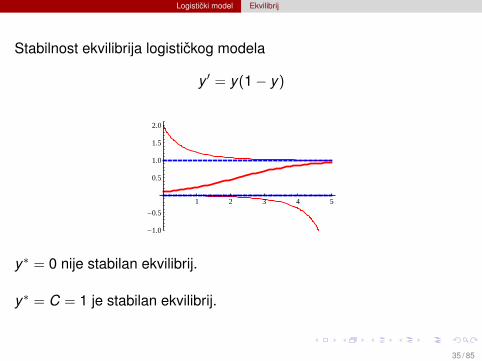
Logisticki model Ekvilibrij
Stabilnost ekvilibrija logistickog modela
y ′ = y(1− y)
1 2 3 4 5
-1.0
-0.5
0.5
1.0
1.5
2.0
y∗ = 0 nije stabilan ekvilibrij.
y∗ = C = 1 je stabilan ekvilibrij.
35 / 85
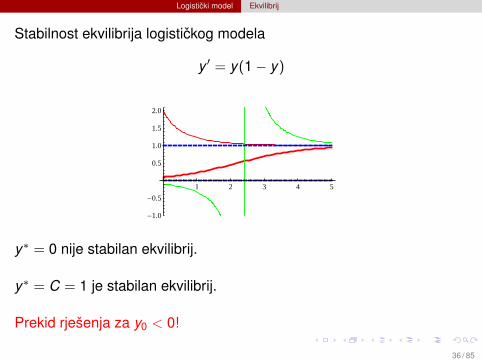
Logisticki model Ekvilibrij
Stabilnost ekvilibrija logistickog modela
y ′ = y(1− y)
1 2 3 4 5
-1.0
-0.5
0.5
1.0
1.5
2.0
y∗ = 0 nije stabilan ekvilibrij.
y∗ = C = 1 je stabilan ekvilibrij.
Prekid rješenja za y0 < 0!
36 / 85
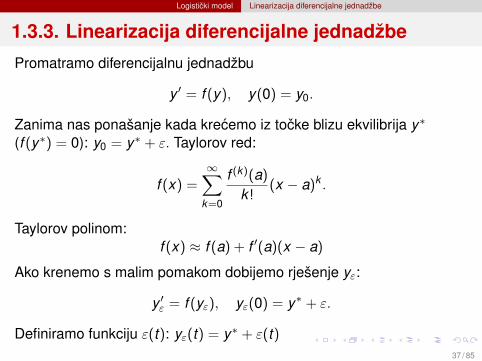
Logisticki model Linearizacija diferencijalne jednadžbe
1.3.3. Linearizacija diferencijalne jednadžbe
Promatramo diferencijalnu jednadžbu
y ′ = f (y), y(0) = y0.
Zanima nas ponašanje kada krecemo iz tocke blizu ekvilibrija y∗
(f (y∗) = 0): y0 = y∗ + ε. Taylorov red:
f (x) =∞∑
k=0
f (k)(a)
k !(x − a)k .
Taylorov polinom:f (x) ≈ f (a) + f ′(a)(x − a)
Ako krenemo s malim pomakom dobijemo rješenje yε:
y ′ε = f (yε), yε(0) = y∗ + ε.
Definiramo funkciju ε(t): yε(t) = y∗ + ε(t)37 / 85

Logisticki model Linearizacija diferencijalne jednadžbe
Koliko je yε(t) daleko od y∗?
ddt
yε(t) = f (yε(t)),⇒
ddt
yε(t) =ddt
(y∗ + ε(t)) =ddt
y∗ +ddtε(t) = fracddtε(t)
S druge strane
ddt
yε(t) = f (yε(t)) = f (y∗ + ε(t)) ≈ f (y∗) + f ′(y∗)ε(t) = f ′(y∗)ε(t)
⇒ ddtε(t) = f ′(y∗)ε(t)
Rješenje je eksponencijalna funkcija.Ako je f ′(y∗) > 0 ekvilibrij y∗ nije lokalno stabilanAko je f ′(y∗) < 0 ekvilibrij y∗ je lokalno stabilan
38 / 85
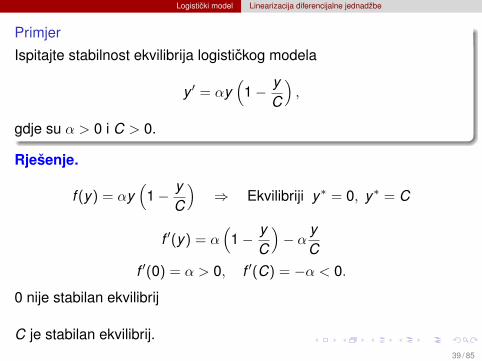
Logisticki model Linearizacija diferencijalne jednadžbe
Primjer
Ispitajte stabilnost ekvilibrija logistickog modela
y ′ = αy(
1− yC
),
gdje su α > 0 i C > 0.
Rješenje.
f (y) = αy(
1− yC
)⇒ Ekvilibriji y∗ = 0, y∗ = C
f ′(y) = α(
1− yC
)− α y
Cf ′(0) = α > 0, f ′(C) = −α < 0.
0 nije stabilan ekvilibrij
C je stabilan ekvilibrij.39 / 85
Logisticki model MATHEMATICA
1.3.4. MATHEMATICA
PrimjerUpotreba programskog paketa Mathematica.
Datoteka: math1.nb
Primjer
Rješenje kolokvija iz Matematicke analize 2 pomocu programskogpaketa Mathematica.
Datoteka: MA2.pdfMA2.nb
PrimjerMalo više primjera upotrebe programskog paketa Mathematica. .
Datoteka: math3.nb40 / 85
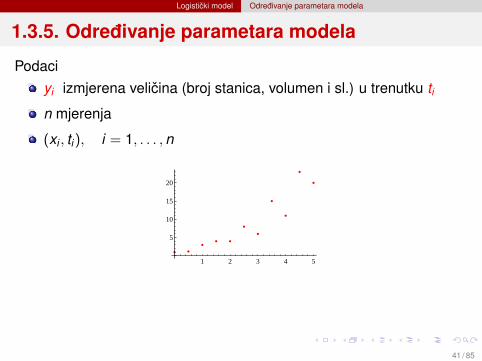
Logisticki model Odredivanje parametara modela
1.3.5. Odredivanje parametara modela
Podaciyi izmjerena velicina (broj stanica, volumen i sl.) u trenutku ti
n mjerenja
(xi , ti), i = 1, . . . ,n
1 2 3 4 5
5
10
15
20
41 / 85
Logisticki model Odredivanje parametara modela
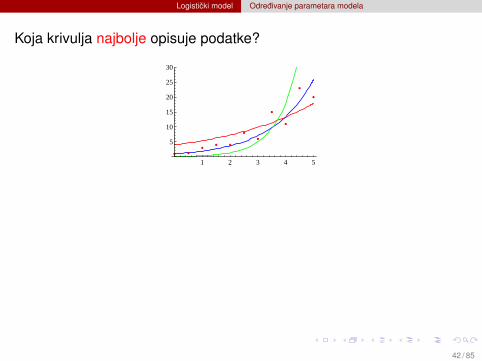
Koja krivulja najbolje opisuje podatke?
1 2 3 4 5
5
10
15
20
25
30
42 / 85
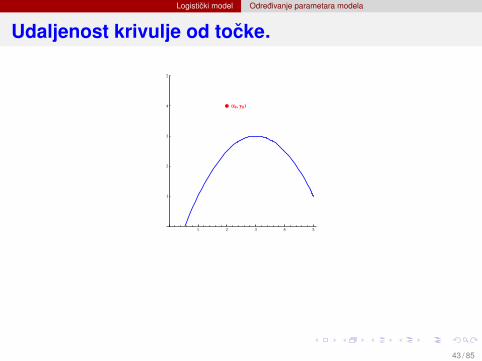
Logisticki model Odredivanje parametara modela
Udaljenost krivulje od tocke.
Ht0, y0L
1 2 3 4 5
1
2
3
4
5
43 / 85
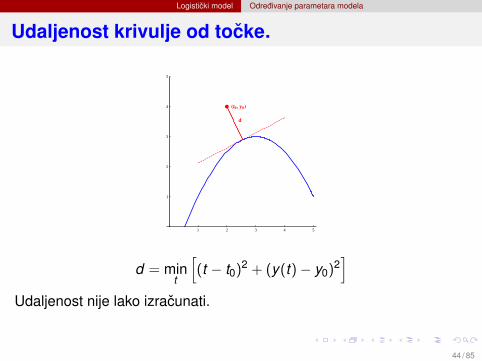
Logisticki model Odredivanje parametara modela
Udaljenost krivulje od tocke.
d
Ht0, y0L
1 2 3 4 5
1
2
3
4
5
d = mint
[(t − t0)2 + (y(t)− y0)2
]Udaljenost nije lako izracunati.
44 / 85
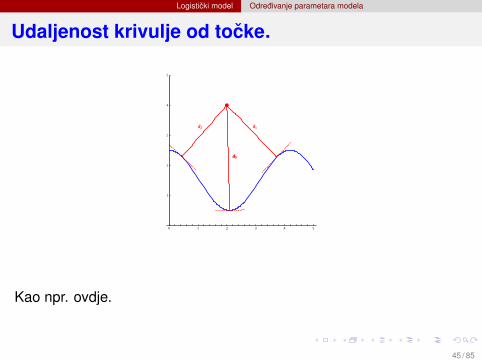
Logisticki model Odredivanje parametara modela
Udaljenost krivulje od tocke.
d1d2
d3d3
0 1 2 3 4 5
1
2
3
4
5
Kao npr. ovdje.
45 / 85
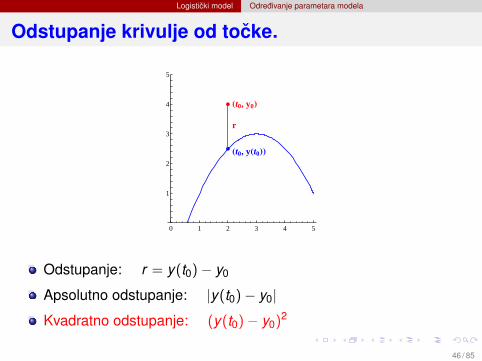
Logisticki model Odredivanje parametara modela
Odstupanje krivulje od tocke.
r
Ht0, y0L
Ht0, yHt0LL
0 1 2 3 4 5
1
2
3
4
5
Odstupanje: r = y(t0)− y0
Apsolutno odstupanje: |y(t0)− y0|
Kvadratno odstupanje: (y(t0)− y0)2
46 / 85
Logisticki model Odredivanje parametara modela
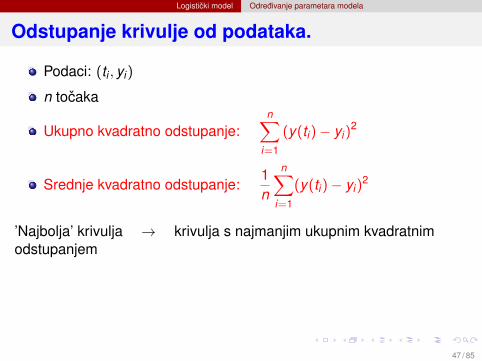
Odstupanje krivulje od podataka.
Podaci: (ti , yi)
n tocaka
Ukupno kvadratno odstupanje:n∑
i=1
(y(ti)− yi)2
Srednje kvadratno odstupanje:1n
n∑i=1
(y(ti)− yi)2
’Najbolja’ krivulja → krivulja s najmanjim ukupnim kvadratnimodstupanjem
47 / 85
Logisticki model Odredivanje parametara modela
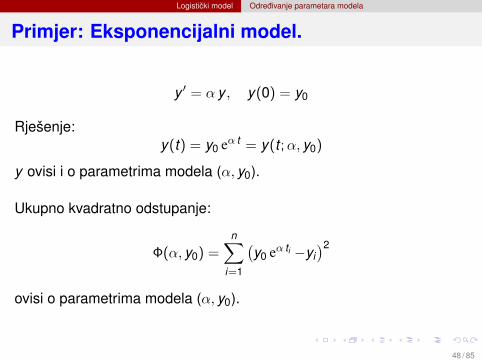
Primjer: Eksponencijalni model.
y ′ = α y , y(0) = y0
Rješenje:y(t) = y0 eα t = y(t ;α, y0)
y ovisi i o parametrima modela (α, y0).
Ukupno kvadratno odstupanje:
Φ(α, y0) =n∑
i=1
(y0 eα ti −yi
)2
ovisi o parametrima modela (α, y0).
48 / 85
Logisticki model Odredivanje parametara modela
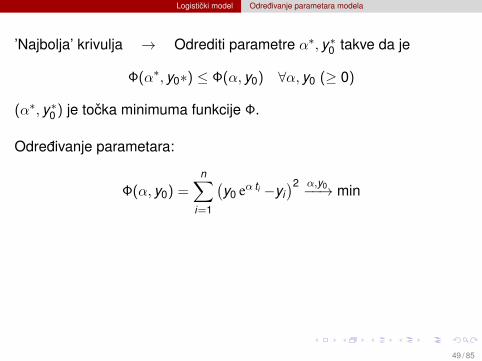
’Najbolja’ krivulja → Odrediti parametre α∗, y∗0 takve da je
Φ(α∗, y0∗) ≤ Φ(α, y0) ∀α, y0 (≥ 0)
(α∗, y∗0 ) je tocka minimuma funkcije Φ.
Odredivanje parametara:
Φ(α, y0) =n∑
i=1
(y0 eα ti −yi
)2 α,y0−−→ min
49 / 85
Logisticki model Odredivanje parametara modela
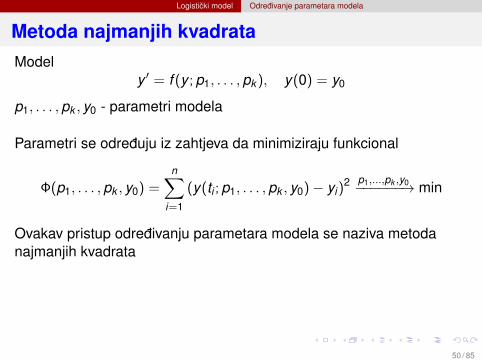
Metoda najmanjih kvadrataModel
y ′ = f (y ; p1, . . . ,pk ), y(0) = y0
p1, . . . ,pk , y0 - parametri modela
Parametri se odreduju iz zahtjeva da minimiziraju funkcional
Φ(p1, . . . ,pk , y0) =n∑
i=1
(y(ti ; p1, . . . ,pk , y0)− yi)2 p1,...,pk ,y0−−−−−−→ min
Ovakav pristup odredivanju parametara modela se naziva metodanajmanjih kvadrata
50 / 85
Logisticki model Odredivanje parametara modela
Za minimizaciju funkcionala Φ koriste se metode za numerickuminimizaciju.
Najpoznatije metode su:Nelder-Meadova simpleks metoda
Newtonova metoda
gradijentna metoda
kvazi-Newtonove metode
51 / 85
Logisticki model Odredivanje parametara modela
Primjer
Odredite konstantu koja najbolje opisuje podatke (xi , yi), i = 1, . . . ,n usmislu najmanjih kvadrata.
Rješenje.Model: y(x) = cKonstantu c odredujemo iz uvjeta
Φ(c) =n∑
i=1
(c − yi)2 c−→ min
Tocku minimuma dobijemo iz uvjeta Φ′(c) = 0:
⇒ 0 =n∑
i=1
2(c − yi) ⇒ 0 =n∑
i=1
c −n∑
i=1
yi = nc −n∑
i=1
yi
⇒ c =1n
n∑i=1
yi
52 / 85
Logisticki model Odredivanje parametara modela
Napomena. Uocite da je Φ ∈ C2:
Φ(c) =n∑
i=1
(c − yi)2
Da smo koristili apsolutno odstupanje, funkcija
Φa(c) =n∑
i=1
|c − yi |
nije derivabilna.Zato se najcešce koristi kvadratno odstupanje, odnosno metodanajmanjih kvadrata.
53 / 85
Logisticki model Odredivanje parametara modela
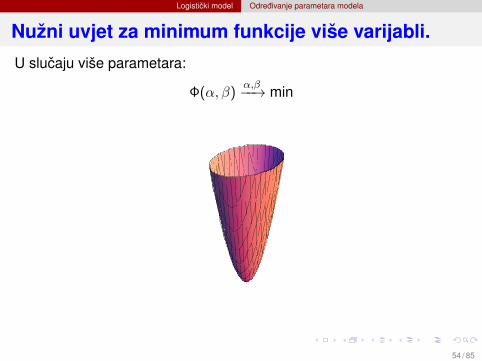
Nužni uvjet za minimum funkcije više varijabli.
U slucaju više parametara:
Φ(α, β)α,β−−→ min
54 / 85
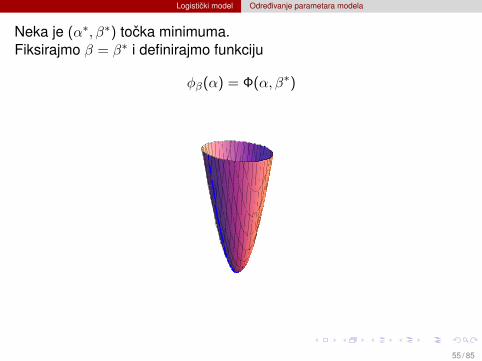
Logisticki model Odredivanje parametara modela
Neka je (α∗, β∗) tocka minimuma.Fiksirajmo β = β∗ i definirajmo funkciju
φβ(α) = Φ(α, β∗)
55 / 85
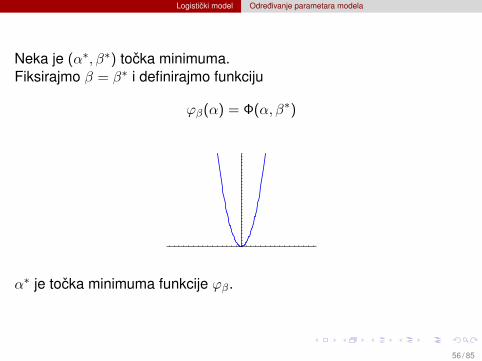
Logisticki model Odredivanje parametara modela
Neka je (α∗, β∗) tocka minimuma.Fiksirajmo β = β∗ i definirajmo funkciju
ϕβ(α) = Φ(α, β∗)
-3 -2 -1 0 1 2 3
0.5
1.0
1.5
2.0
2.5
3.0
α∗ je tocka minimuma funkcije ϕβ.
56 / 85
Logisticki model Odredivanje parametara modela
⇒ ϕ′β(α∗) = 0
Oznaka:∂
∂αΦ(α, β) :=
ddα
ϕβ(α)
Uvjet:∂Φ
∂α(α∗, β∗) = 0
Isto i za β.
Kriticna tocka je rješenje jednadžbe
∂Φ
∂α(α, β) = 0
∂Φ
∂β(α, β) = 0
57 / 85
Logisticki model Odredivanje parametara modela
Gradijent:
∇Φ(α, β) =
[∂Φ∂α (α, β)
∂Φ∂β (α, β)
]Ukoliko imamo više parametara, p = (p1,p2, . . . ,pk ),
∇Φ(α, β) =
∂Φ∂p1
(p)
∂Φ∂p2
(p)
...∂Φ∂pk
(p)
Nužni uvjet minimuma:
∇Φ(p) = 0
58 / 85
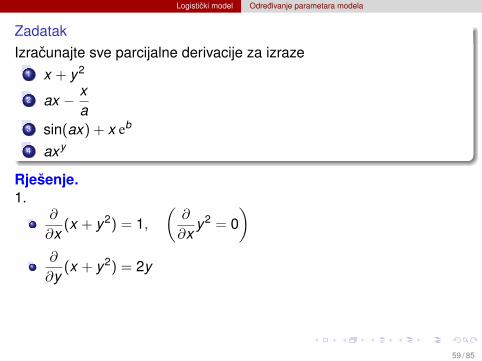
Logisticki model Odredivanje parametara modela
ZadatakIzracunajte sve parcijalne derivacije za izraze
1 x + y2
2 ax − xa
3 sin(ax) + x eb
4 axy
Rješenje.1.
∂
∂x(x + y2) = 1,
(∂
∂xy2 = 0
)∂
∂y(x + y2) = 2y
59 / 85
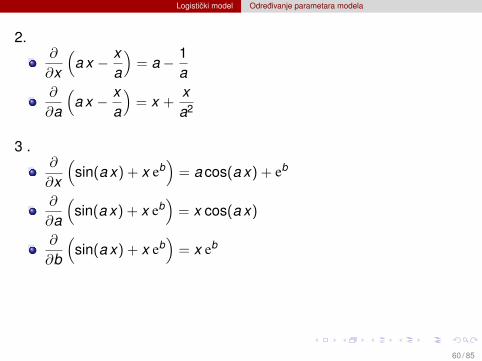
Logisticki model Odredivanje parametara modela
2.∂
∂x
(a x − x
a
)= a− 1
a∂
∂a
(a x − x
a
)= x +
xa2
3 .∂
∂x
(sin(a x) + x eb
)= a cos(a x) + eb
∂
∂a
(sin(a x) + x eb
)= x cos(a x)
∂
∂b
(sin(a x) + x eb
)= x eb
60 / 85
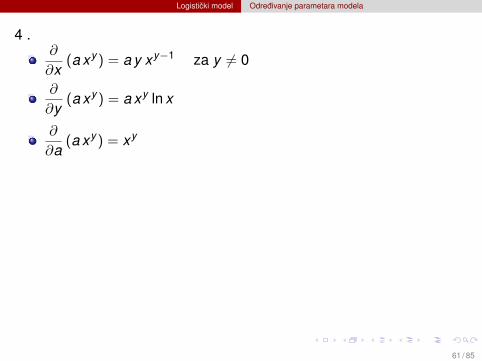
Logisticki model Odredivanje parametara modela
4 .∂
∂x(a xy ) = a y xy−1 za y 6= 0
∂
∂y(a xy ) = a xy ln x
∂
∂a(a xy ) = xy
61 / 85
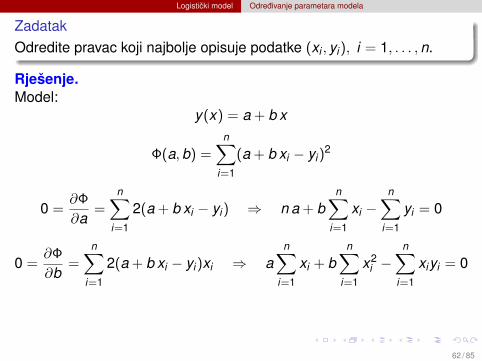
Logisticki model Odredivanje parametara modela
ZadatakOdredite pravac koji najbolje opisuje podatke (xi , yi), i = 1, . . . ,n.
Rješenje.Model:
y(x) = a + b x
Φ(a,b) =n∑
i=1
(a + b xi − yi)2
0 =∂Φ
∂a=
n∑i=1
2(a + b xi − yi) ⇒ n a + bn∑
i=1
xi −n∑
i=1
yi = 0
0 =∂Φ
∂b=
n∑i=1
2(a + b xi − yi)xi ⇒ an∑
i=1
xi + bn∑
i=1
x2i −
n∑i=1
xiyi = 0
62 / 85
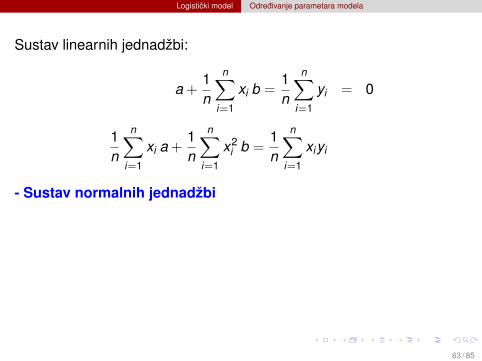
Logisticki model Odredivanje parametara modela
Sustav linearnih jednadžbi:
a +1n
n∑i=1
xi b =1n
n∑i=1
yi = 0
1n
n∑i=1
xi a +1n
n∑i=1
x2i b =
1n
n∑i=1
xiyi
- Sustav normalnih jednadžbi
63 / 85
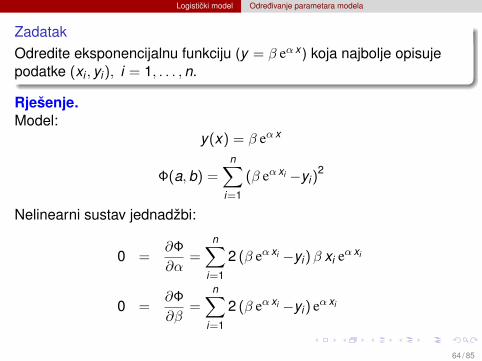
Logisticki model Odredivanje parametara modela
ZadatakOdredite eksponencijalnu funkciju (y = β eα x ) koja najbolje opisujepodatke (xi , yi), i = 1, . . . ,n.
Rješenje.Model:
y(x) = β eα x
Φ(a,b) =n∑
i=1
(β eα xi −yi)2
Nelinearni sustav jednadžbi:
0 =∂Φ
∂α=
n∑i=1
2 (β eα xi −yi)β xi eα xi
0 =∂Φ
∂β=
n∑i=1
2 (β eα xi −yi) eα xi
64 / 85
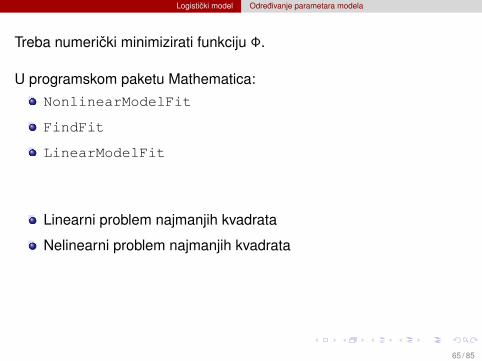
Logisticki model Odredivanje parametara modela
Treba numericki minimizirati funkciju Φ.
U programskom paketu Mathematica:NonlinearModelFit
FindFit
LinearModelFit
Linearni problem najmanjih kvadrata
Nelinearni problem najmanjih kvadrata
65 / 85
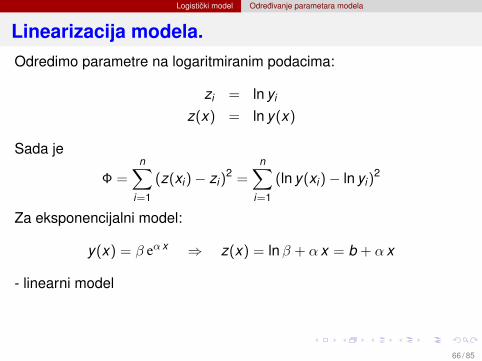
Logisticki model Odredivanje parametara modela
Linearizacija modela.Odredimo parametre na logaritmiranim podacima:
zi = ln yi
z(x) = ln y(x)
Sada je
Φ =n∑
i=1
(z(xi)− zi)2 =
n∑i=1
(ln y(xi)− ln yi)2
Za eksponencijalni model:
y(x) = β eα x ⇒ z(x) = lnβ + α x = b + α x
- linearni model
66 / 85
Logisticki model Odredivanje parametara modela
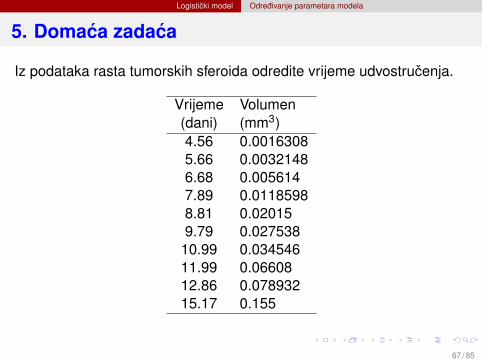
5. Domaca zadaca
Iz podataka rasta tumorskih sferoida odredite vrijeme udvostrucenja.
Vrijeme Volumen(dani) (mm3)4.56 0.00163085.66 0.00321486.68 0.0056147.89 0.01185988.81 0.020159.79 0.027538
10.99 0.03454611.99 0.0660812.86 0.07893215.17 0.155
67 / 85
Logisticki model Modeliranje gubitka populacije
1.3.6. Modeliranje gubitka populacije
Ograniceno trajanje života jedinke (umiranje)
Svaka jedinka živi tocno τ jedinica vremena
U trenutku t umiru jedinke rodene u trenutku t − τ
Brzina umiranja u trenutku t jedinka je brzini radanja u trenutkut − τ
Eksponencijalni model: brzina radanja: αN(t)
brzina rasta = brzina radanja - brzina umiranja
N ′(t) = αN(t)− αN(t − τ)
Uocite, diferencijalna jednadžba nije oblika y ′ = f (t , y)
→ diferencijalna jednadžba s kašnjenjem
68 / 85
Logisticki model Modeliranje gubitka populacije
Rješenje diferencijalne jednadžbe N ′(t) = αN(t)− αN(t − τ)
Rješenje potražimo u obliku
N(t) = c eb t
Odredimo b i c tako da je fiferencijalna jednadžba zadovoljena.
cb eb t = αc eb t −αc eb (t−τ)
⇒ b = α− α e−b τ
⇒ b1− e−b τ = α
Postoji li rješenje ove nelinearne jednadžbe?
Promotrimo funkciju
h(b) =b
1− e−b τ
69 / 85
Logisticki model Modeliranje gubitka populacije
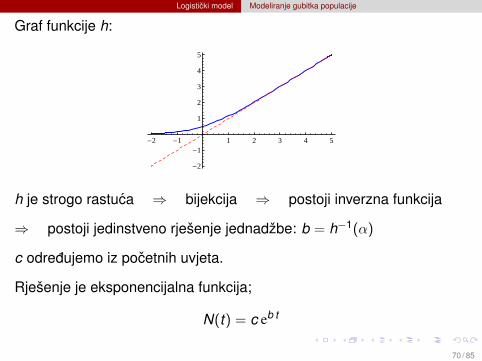
Graf funkcije h:
-2 -1 1 2 3 4 5
-2
-1
1
2
3
4
5
h je strogo rastuca ⇒ bijekcija ⇒ postoji inverzna funkcija
⇒ postoji jedinstveno rješenje jednadžbe: b = h−1(α)
c odredujemo iz pocetnih uvjeta.
Rješenje je eksponencijalna funkcija;
N(t) = c eb t
70 / 85
Logisticki model Modeliranje gubitka populacije
Umiranje se modelira s −βN(t).
Za eksponencijalni model:
N ′ = αN − βN = (α− β)N = αN
Rast bez ogranicenja + ograniceno trajanje života jedinke ⇒eksponencijalni model
71 / 85
Logisticki model Modeliranje gubitka populacije
Izlov populacije.
brzina rasta = brzina prirasta - brzina izlova
Rast bez izlova:N ′ = f (N)
Konstantni izlov.Izlov zadan fiksnom kvotom.Lovi se fiksna kolicina u jedinici vremena.
⇒ Brzina izlova konstantna. ⇒ Brzina izlova = K .
Model:N ′ = f (N)− K
72 / 85
Logisticki model Modeliranje gubitka populacije
Primjer
Pretpostavimo da logisticki rast opisuje rast populacije riba (N) bezizlova. Neka se ribarenjem izlovljava dio riba konstantnom brzinom K .Tada je rast populacije s izlovom opisan s
N ′ = αN(
1− NC
)− K
Napomena. Desna strana se može faktorizirati, pa je jednadžba oblika
N ′ = a(b − N)(c + N)
73 / 85
Logisticki model Modeliranje gubitka populacije
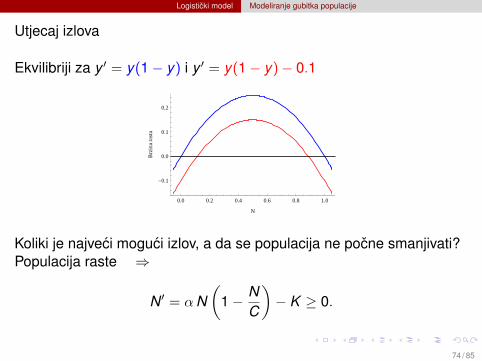
Utjecaj izlova
Ekvilibriji za y ′ = y(1− y) i y ′ = y(1− y)− 0.1
0.0 0.2 0.4 0.6 0.8 1.0
-0.1
0.0
0.1
0.2
N
Brz
ina
rast
a
Koliki je najveci moguci izlov, a da se populacija ne pocne smanjivati?Populacija raste ⇒
N ′ = αN(
1− NC
)− K ≥ 0.
74 / 85
Logisticki model Modeliranje gubitka populacije
Rješavamo jednadžbu
αN(
1− NC
)− K = 0
Za populaciju velicine N0, maksimalni izlov je
Kmax = αN0
(1− N0
C
)
75 / 85
Logisticki model Modeliranje gubitka populacije
Maksimalni održivi prinos
Koliki je najveci moguci izlov, a da se populacija ne izlovi?
(Populacija se može i smanjivati!)
Najveci izlov je moguc kada je rast najbrži.
N ′ = αN(
1− NC
)− K
Na desnoj strani je kvadratna funkcija, maksimum za N =C2
N ′ = 0 ⇒ Kodr = αC2
(1−
C2C
)=αC4
76 / 85
Logisticki model Modeliranje gubitka populacije
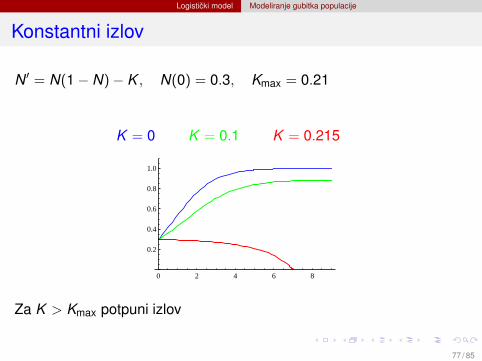
Konstantni izlov
N ′ = N(1− N)− K , N(0) = 0.3, Kmax = 0.21
K = 0 K = 0.1 K = 0.215
0 2 4 6 8
0.2
0.4
0.6
0.8
1.0
Za K > Kmax potpuni izlov
77 / 85
Logisticki model Modeliranje gubitka populacije
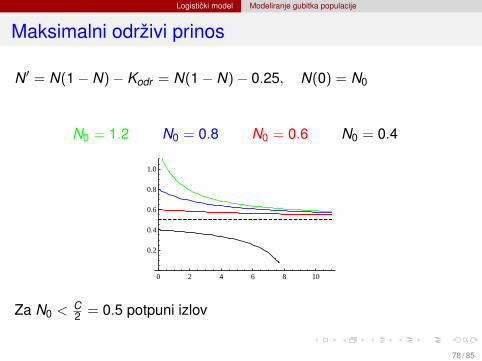
Maksimalni održivi prinos
N ′ = N(1− N)− Kodr = N(1− N)− 0.25, N(0) = N0
N0 = 1.2 N0 = 0.8 N0 = 0.6 N0 = 0.4
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1.0
Za N0 <C2 = 0.5 potpuni izlov
78 / 85
Logisticki model Modeliranje gubitka populacije
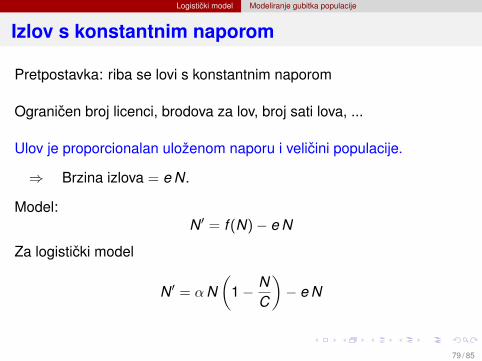
Izlov s konstantnim naporom
Pretpostavka: riba se lovi s konstantnim naporom
Ogranicen broj licenci, brodova za lov, broj sati lova, ...
Ulov je proporcionalan uloženom naporu i velicini populacije.
⇒ Brzina izlova = e N.
Model:N ′ = f (N)− e N
Za logisticki model
N ′ = αN(
1− NC
)− e N
79 / 85
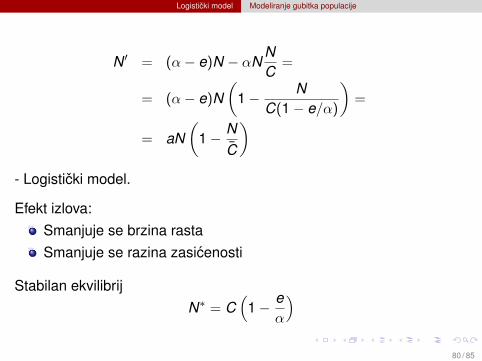
Logisticki model Modeliranje gubitka populacije
N ′ = (α− e)N − αNNC
=
= (α− e)N(
1− NC(1− e/α)
)=
= aN(
1− NC
)- Logisticki model.
Efekt izlova:Smanjuje se brzina rastaSmanjuje se razina zasicenosti
Stabilan ekvilibrijN∗ = C
(1− e
α
)80 / 85
Logisticki model Modeliranje gubitka populacije
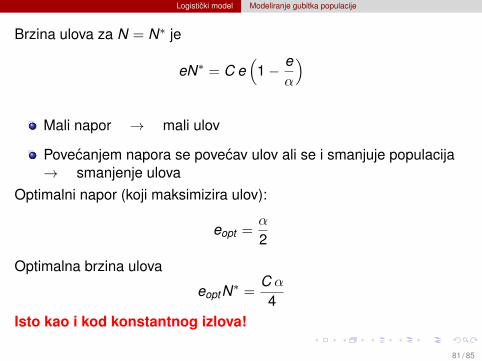
Brzina ulova za N = N∗ je
eN∗ = C e(
1− eα
)
Mali napor → mali ulov
Povecanjem napora se povecav ulov ali se i smanjuje populacija→ smanjenje ulova
Optimalni napor (koji maksimizira ulov):
eopt =α
2
Optimalna brzina ulova
eoptN∗ =C α
4Isto kao i kod konstantnog izlova!
81 / 85
Logisticki model Modeliranje gubitka populacije
Koja je razlika u modelima?
Ako namjerno ili slucajno dode do prekoracenja ulova:Model s konstantnim izlovom - istrebljenje populacije
Model s konstantnim naporom - smanjit ce se ulov ali ce stabilniekvilibrij ostati nepromijenjen, ali s manjom populacijom
Može se pokazati da ukoliko se nešto nepredvideno dogodi populaciji:brži oporavak u modelu s konstantnim naporom
82 / 85
Logisticki model Modeliranje gubitka populacije
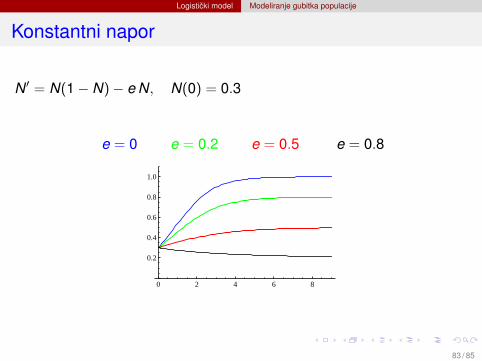
Konstantni napor
N ′ = N(1− N)− e N, N(0) = 0.3
e = 0 e = 0.2 e = 0.5 e = 0.8
0 2 4 6 8
0.2
0.4
0.6
0.8
1.0
83 / 85
Logisticki model Modeliranje gubitka populacije
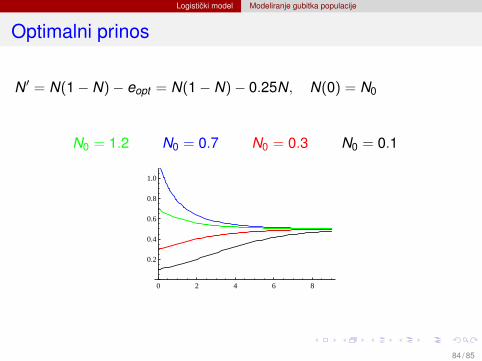
Optimalni prinos
N ′ = N(1− N)− eopt = N(1− N)− 0.25N, N(0) = N0
N0 = 1.2 N0 = 0.7 N0 = 0.3 N0 = 0.1
0 2 4 6 8
0.2
0.4
0.6
0.8
1.0
84 / 85
Logisticki model Modeliranje gubitka populacije
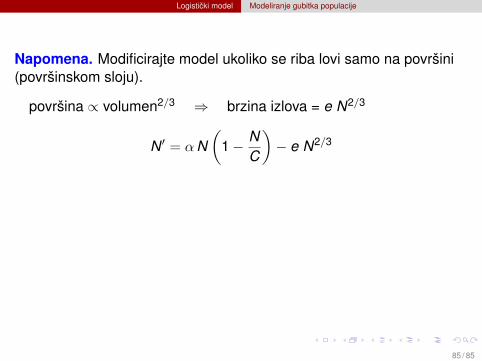
Napomena. Modificirajte model ukoliko se riba lovi samo na površini(površinskom sloju).
površina ∝ volumen2/3 ⇒ brzina izlova = e N2/3
N ′ = αN(
1− NC
)− e N2/3
85 / 85








![TABLICA ZAŠTITNIH PLINOVA ZA ZAVARIVANJE I · PDF fileTABLICA ZAŠTITNIH PLINOVA ZA ZAVARIVANJE I REZANJE Naziv proizvoda Grupa po ISO 14175 Volumni sastav [%] Postupak po HRN EN](https://static.fdocument.org/doc/165x107/5a78773a7f8b9aa2448c5802/tablica-zastitnih-plinova-za-zavarivanje-i-tablica-zastitnih-plinova-za.jpg)