[IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014...
6
Design of a Fractional-Order Integrator for High-Precision Stages Joost van der Weijde 1 and Marcel Heertjes 2 Abstract— To provide more tuning freedom in the trade-off between overshoot and settling times of PID controlled stages, a PID controller with a fractional order integrator is studied. The fractional order integrator has two parameters dependent on the order λ . Namely, the corner frequency ω i (λ ) and the gain k p (λ ). Both parameters are designed such that robust stability is maintained independent on the choice of λ . It will be shown that the fractional order integrator can be approximated by a low-order loop shaping filter. As such, insights from fractional order control can be used by the control engineer to aid his tuning tasks. The controller is tested on a wafer stage system. I. INTRODUCTION In the wafer scanning industry feature sizes as small as 20-30 nm are common practice. To obtain such feature sizes the positioning of the wafer- and reticle stages requires nanometer accuracy [3]. By default the complex dynamics of these stages are controlled with PID-type controllers. These controllers are tuned in the frequency domain based on loop shaping arguments. Subject to design limitations, however, time-domain performance measures like overshoot and settling times cannot be tuned independently due to inherent trade-offs. In dealing with these trade-offs, we study a fractional order integrator (FOI). The FOI enables choosing a different balance between overshoot and settling times without compromising robust stability properties. This is because only low-frequency char- acteristics (magnitude and phase) sufficiently below the con- troller bandwidth are influenced. The idea is that decreasing the integrator order λ induces less phase lag. Depending on the choice of λ this can be used to balance between less overshoot but with increased settling times, or reversely between more overshoot but with decreased settling times. According to [14], the first application of Fractional order control (FOC) for dynamic systems dates back to Oustaloup, who developed several generations of the so called CRONE controller; CRONE is an abbreviation for Commande Ro- buste d’Ordre Non Entier, see also [11], [12] and [13]. For the well-known PID-controller, which is more relevant to the motion control context considered in this paper, an alternative design is given by the PI λ D μ controller as proposed in [14]. In [8], [9] a tuning method is proposed for this type of controller, which is experimentally verified. More recent developments in FOC (see in this regard also the special issue in Mechatronics [5]) focus on designing robust controllers [18]. For example, in [1], [6] and [20] robustness properties to system variation are improved by requiring the controller to have a flat phase behaviour around the crossover frequency. Also extensions to non-linear (con- trol) systems are part of extensive research. In [7] cogging effects in servo systems are compensated using a FOC and in 1 Joost van der Weijde is with Delft University of Technology, 2628 CD Delft, The Netherlands. [email protected] 2 Marcel Heertjes is with Faculty of Mechanical Engineering, Eindhoven University of Technology, 5600 MB Eindhoven, The Netherlands. Marcel Heertjes is also with Mechatronic Systems Development, ASML, 5500 AH Veldhoven, The Netherlands. [email protected] [20] FOC is used in combination with sliding mode control. Regarding FOC design, [19] for example presents an H ∞ approach and in [15] FOC is formulated as being part of a general-form optimal control problem. Also in the wafer scanning industry the potential of FOC is recognized, see for example [2] where FOC is used to induce active damping. In terms of stage control, however, limited results on FOC have been reported even though FOC may provide a direct tuning option for the trade-off encountered between overshoot and settling times during scanning. To fill this gap, this paper presents a simple design method (and verification) that allows for modifying the integrator part of a nominal PID-type of controller. The advantage is that time-domain performance specifications like overshoot and settling-times can be balanced in a physically more understandable manner. Subsequently this may aid the loop shaping process such as practised by the motion control engi- neer. The design is based on finding the controller parameters ω i (λ ), i.e. the integrator corner frequency, and k p (λ ) a gain, dependent on the fractional order λ of the integrator. The novelty of the design is in preserving the robustness margins related to the underlying integral PID controller with λ = 1. Implementation is realized by a second-order loop shaping filter within a limited frequency interval of interest. The remainder of this paper is organised as follows. In section II the concept of a fractional order PID controller is discussed. Section III considers fractional order transfer function approximations. In section IV a model will be de- scribed that demonstrates the use of the FOI to be designed. In Section V the design of a FOI will be given. Section VI will discuss how to implement the FOI. In Section VII experimental results obtained from a wafer stage system will be discussed. Finally, Section VIII summarizes the main conclusions of this work. II. FRACTIONAL ORDER PID CONTROL Before discussing the proposed FOI, this section will quickly review the concept of fractional order transfer func- tions. For a more detailed discussion the reader is referred to [14], [18]. Consider a nominal PID controller given by: C(s)= k p 1 + ω i s + s ω d , (1) with s the Laplace variable, k p the controller gain, ω i the corner frequency of the integrator, and ω d the corner frequency of the differentiator. In contrast to (1), a fractional order PID controller is generally given by: C f oc (s)= k p 1 + ω i s λ + s μ ω d , (2) with parameters λ and μ respectively representing the frac- tion of the integral action and the fraction of the derivative action. A graphical representation illustrating the extra design freedom gained by introducing the parameters λ and μ is 2014 American Control Conference (ACC) June 4-6, 2014. Portland, Oregon, USA 978-1-4799-3274-0/$31.00 ©2014 AACC 978
Transcript of [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014...
![Page 1: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/1.jpg)
Design of a Fractional-Order Integrator for High-Precision Stages
Joost van der Weijde1 and Marcel Heertjes2
Abstract— To provide more tuning freedom in the trade-offbetween overshoot and settling times of PID controlled stages, aPID controller with a fractional order integrator is studied. Thefractional order integrator has two parameters dependent onthe order λ . Namely, the corner frequency ωi(λ ) and the gainkp(λ ). Both parameters are designed such that robust stabilityis maintained independent on the choice of λ . It will be shownthat the fractional order integrator can be approximated by alow-order loop shaping filter. As such, insights from fractionalorder control can be used by the control engineer to aid histuning tasks. The controller is tested on a wafer stage system.
I. INTRODUCTION
In the wafer scanning industry feature sizes as small as20-30 nm are common practice. To obtain such feature sizesthe positioning of the wafer- and reticle stages requiresnanometer accuracy [3]. By default the complex dynamicsof these stages are controlled with PID-type controllers.These controllers are tuned in the frequency domain basedon loop shaping arguments. Subject to design limitations,however, time-domain performance measures like overshootand settling times cannot be tuned independently due toinherent trade-offs. In dealing with these trade-offs, we studya fractional order integrator (FOI).
The FOI enables choosing a different balance betweenovershoot and settling times without compromising robuststability properties. This is because only low-frequency char-acteristics (magnitude and phase) sufficiently below the con-troller bandwidth are influenced. The idea is that decreasingthe integrator order λ induces less phase lag. Dependingon the choice of λ this can be used to balance betweenless overshoot but with increased settling times, or reverselybetween more overshoot but with decreased settling times.
According to [14], the first application of Fractional ordercontrol (FOC) for dynamic systems dates back to Oustaloup,who developed several generations of the so called CRONEcontroller; CRONE is an abbreviation for Commande Ro-buste d’Ordre Non Entier, see also [11], [12] and [13]. Forthe well-known PID-controller, which is more relevant to themotion control context considered in this paper, an alternativedesign is given by the PIλ Dµ controller as proposed in [14].In [8], [9] a tuning method is proposed for this type ofcontroller, which is experimentally verified.
More recent developments in FOC (see in this regard alsothe special issue in Mechatronics [5]) focus on designingrobust controllers [18]. For example, in [1], [6] and [20]robustness properties to system variation are improved byrequiring the controller to have a flat phase behaviour aroundthe crossover frequency. Also extensions to non-linear (con-trol) systems are part of extensive research. In [7] coggingeffects in servo systems are compensated using a FOC and in
1Joost van der Weijde is with Delft University of Technology, 2628 CDDelft, The Netherlands. [email protected]
2Marcel Heertjes is with Faculty of Mechanical Engineering, EindhovenUniversity of Technology, 5600 MB Eindhoven, The Netherlands. MarcelHeertjes is also with Mechatronic Systems Development, ASML, 5500 AHVeldhoven, The Netherlands. [email protected]
[20] FOC is used in combination with sliding mode control.Regarding FOC design, [19] for example presents an H∞approach and in [15] FOC is formulated as being part of ageneral-form optimal control problem.
Also in the wafer scanning industry the potential of FOC isrecognized, see for example [2] where FOC is used to induceactive damping. In terms of stage control, however, limitedresults on FOC have been reported even though FOC mayprovide a direct tuning option for the trade-off encounteredbetween overshoot and settling times during scanning. Tofill this gap, this paper presents a simple design method(and verification) that allows for modifying the integratorpart of a nominal PID-type of controller. The advantage isthat time-domain performance specifications like overshootand settling-times can be balanced in a physically moreunderstandable manner. Subsequently this may aid the loopshaping process such as practised by the motion control engi-neer. The design is based on finding the controller parametersωi(λ ), i.e. the integrator corner frequency, and kp(λ ) a gain,dependent on the fractional order λ of the integrator. Thenovelty of the design is in preserving the robustness marginsrelated to the underlying integral PID controller with λ = 1.Implementation is realized by a second-order loop shapingfilter within a limited frequency interval of interest.
The remainder of this paper is organised as follows. Insection II the concept of a fractional order PID controlleris discussed. Section III considers fractional order transferfunction approximations. In section IV a model will be de-scribed that demonstrates the use of the FOI to be designed.In Section V the design of a FOI will be given. SectionVI will discuss how to implement the FOI. In Section VIIexperimental results obtained from a wafer stage system willbe discussed. Finally, Section VIII summarizes the mainconclusions of this work.
II. FRACTIONAL ORDER PID CONTROL
Before discussing the proposed FOI, this section willquickly review the concept of fractional order transfer func-tions. For a more detailed discussion the reader is referredto [14], [18]. Consider a nominal PID controller given by:
C(s) = kp
(
1+ωi
s+
sωd
)
, (1)
with s the Laplace variable, kp the controller gain, ωithe corner frequency of the integrator, and ωd the cornerfrequency of the differentiator. In contrast to (1), a fractionalorder PID controller is generally given by:
C f oc(s) = kp
(
1+ωi
sλ +sµ
ωd
)
, (2)
with parameters λ and µ respectively representing the frac-tion of the integral action and the fraction of the derivativeaction. A graphical representation illustrating the extra designfreedom gained by introducing the parameters λ and µ is
2014 American Control Conference (ACC)June 4-6, 2014. Portland, Oregon, USA
978-1-4799-3274-0/$31.00 ©2014 AACC 978
![Page 2: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/2.jpg)
shown in Fig. 1. Both a first-order derivative and a first-order integrator corresponds to a discrete (integer) step inthis coordinate frame. In addition to the three non-trivialpoints associated with the nominal PID controller in (1), thefractional order PID in (2) provides the freedom to choosean arbitrary point in the plane spanned by µ and λ .
P
PI
PD
PID
PIλ Dµ
1
10
λ
µ
Fig. 1. Graphical representation of the design freedom induced by thefractional order PID controller in (2) in comparison with the nominal PIDcontroller in (1).
III. FRACTIONAL ORDER APPROXIMATIONS
To implement a FOC, a sufficiently accurate approxima-tion is required. In the frequency domain such an approx-imation can be realized by introducing consecutive pairsof poles and zeros. The fraction to be approximated andthe quality of the approximation is in principle determinedby the distance between the resulting poles and zeros andby the number of the considered pairs, see [17, p.59-73]for an overview of available methods. We will use the so-called Matsuda approximation. This method identifies thesystem under study by its gain characteristics, which areapproximated over a certain frequency interval.
Let the Matsuda approximation of frequency responsefunction F(s), denoted by F(s), have N zeros and N poles.Then 2N+1 frequencies should be chosen; note that an evennumber of frequencies results in an approximation that willbe non-proper! Let’s assume a logarithmic distribution of2N + 1 frequencies on the desired interval [ω0,ωM] whereM = 2N. Define the set of functions d0...dM as:
d0(ω) = |F( jω)|
dm(ω) =ω −ωm−1
dm−1(ω)− dm−1(ωm−1),
(3)
with m ∈ 1...M. Derive from these functions a set of coeffi-cients defined by:
α0 = d0(ω0)
αm = dm(ωm),(4)
with m ∈ 1...M. An approximation F(s) using, for example,two pole-zero pairs, i.e. N = 2, is now given by the continuedfraction:
F(s) = α0 +s−ω0
α1 +s−ω1
α2 +s−ω2
α3 +s−ω3
α4
. (5)
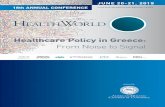
A reason to keep the order of the approximation F(s)small is to limit controller complexity, hence the cost ofcontrol. Besides, the approximation is only required to holdwithin a certain frequency interval. Fig. 2 shows the effect of
a second-order approximation within the desired frequencyinterval of [10−1,101] [rad/s]. The dashed lines show a trueFOI with fraction 1/2 and ωi = 1, i.e. F(s) := s−1/2. Thelocations of the poles are indicated with a square, the zerosare indicated with a circle. From the figure, it is clear thatadding pole-zero pairs generally improves the accuracy ofthe approximation.
10−2
100
102
10−1
100
101
10−2
100
102
−60
−40
−20
0
Mag
.[ab
s]∠
[deg
]
Frequency [Hz]
Bode plot of Matsuda approximation
F(s)F(s)
Fig. 2. Bode plot of a second-order Matsuda approximation of a fractionalorder integrator with fraction λ = 1
2 .
Absolute measures for the accuracy of an approximationare the maximum absolute errors ε in gain and phase ofthe approximation with respect to the characteristics of thetrue fractional order function within the frequency intervalof interest: [ω0,ωM]. In Table I examples are given forapproximations of the function
F(s) = s1−λ , (6)
for different orders λ and in terms of the number N of pole-zero pairs per decade [1/dec]. This leads to the conclusion
TABLE IACCURACY OF THE APPROXIMATION AT DIFFERENT FRACTIONS
N = 1/dec N = 2/dec N = 3/decεmag ε∠ εmag ε∠ εmag ε∠
1−λ =±0.1 10−1 2 10−2 0.3 10−3 0.07
1−λ =±0.5 0.63 7 10−1 1 5 ·10−3 0.3
that a sufficiently accurate approximation is obtained forrelatively small-order approximations.
IV. MODEL DESCRIPTION
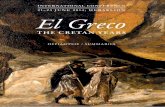
In the context of motion control systems, we adopt thestandard control schematics as shown in Fig. 3. The PID
−
∑
∑∑
d2
dt2K f f
C FLP Pr e
u f f w
y
Fig. 3. Block diagram of the motion control scheme.
979
![Page 3: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/3.jpg)
controller C is given by (1) with ωi = 2π · 3 rad · s−1 andωd = 2π · 12 rad · s−1. The PID controller is used in serieswith a standard fourth-order low-pass filter FLP, or:
FLP(s) =
(
w2l p
s2 + 2ζ wl ps+w2l p
)2
, (7)
with corner frequency wl p = 2π120 rad · s−1 and dimension-less damping factor ζ = 0.5. The low-pass filter assures lim-ited amplification of high-frequency noises and does hardlyinfluence performance in terms of bandwidth. The plant P ismodelled by a 6th order mass-spring-damper system:
P(s) =1
140s2 ·1.3 ·106
(s2 + 69s+ 1.3 ·106)·
1.4 ·107
(s2 + 75s+ 1.4 ·107).
(8)
The third-order reference r has a jerk profile as shown inFig. 4. The feed-forward signal u f f is the output of an inertialfeed-forward controller with K f f = 140 kg. The disturbancew is a constant force disturbance of 375[N]. The plant outputis given by y, whereas the error e follows from e = r− y.
0 0.2 0.4 0.6 0.8 1−1500
−1000
−500
0
500
1000
1500
t in seconds
d3 r/
dt3
inm
s3
Fig. 4. Jerk profile used to define the reference r = r(t).
V. FRACTIONAL ORDER INTEGRATOR DESIGN
To derive a FOI, the PID controller C(s) in (1) is modifiedto include fractional orders according to (2) with µ = 1, ar-bitrary λ , and the corner frequencies ωi and ωd respectively,2π · 3 and 2π · 12 rad · s−1. Furthermore, we take the λ th
order of s together with the λ th order of ωi. As a result,the frequency below which the integrator dominates overthe proportional action (ω = ωi) remains unchanged. Themodified controller is then given by:
C∗(s) = kp
(
1+(ωi
s
)λ+
sωd
)
. (9)
Fig. 5 shows Bode-plots of this controller which includes anextra low-pass filter to limit high-frequency noise amplifica-tion, i.e. C∗( jω)Fl p( jω), for λ ∈ 0.9,1,1.1. The true FOIis approximated by a 30th order Matsuda approximation, onthe interval [10−4,103] rad · s−1; note from Table I that thisgives a fair resemblance of the true fractional-order integratoron the considered frequency interval.
Fig. 6 shows the resulting open-loop Nyquist plots. Thecharacteristics at frequencies where ω ≈ ωc induce different
100
101
102
106
107
100
101
102
−150
−100
−50
0
50
|C∗(
jω)F
lp(
jω)|
∠C∗(
j ω)F
lp(
jω)
inde
gree
s
Frequency in Hz
λ = 0.9λ = 1.0λ = 1.1
Fig. 5. Bode plots of fractional order PID-controllers C∗( jω)Fl p( jω).
−3 −2 −1 0 1−1
−0.5
0
0.5
1
ℑC
∗(
jω)F
lp(
jω)P(
jω)
ℜC∗( jω)Fl p( jω)P( jω)
λ = 0.9λ = 1.0λ = 1.1
Fig. 6. Nyquist plots of C∗( jω)Fl p( jω)P( jω).
phase margins. The gain margins, which are obtained athigher frequencies, are almost identical because the frac-tional order only affects the lag-filter part of the controller;unity gain is indicated by the dotted circle. Keeping the samecorner frequencies ωi and ωd as done in (9) is thereforeconsidered undesirable.
To preserve stability margins, i.e. to maintain robuststability independent on the choice of λ , ωi and kp shouldbe made a function of λ , i.e. ωi = ωi(λ ) and kp = kp(λ ).In this regard, the margin being influenced the most appearsto be the phase margin, which is defined at the crossoverfrequency ωc. Therefore ωi and kp need to be derived suchthat the FOC preserves the phase and magnitude at ωc.
To this end write (2) with µ = 1 as:
Ci(s,λ ) = kp(λ )(
1+ωi(λ )
sλ +s
ωd
)
. (10)
For s = jω , (10) can be rewritten as:
Ci( jω ,λ ) = kp(λ )(
1+ωi(λ )( jω)λ +
jωωd
)
= kp(λ )(
1+ωi(λ )
ωλ (− j)λ +jωωd
)
,(11)
980
![Page 4: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/4.jpg)
where (− j)λ can be written as:
(− j)λ = cos(λπ2)− j sin(λ
π2). (12)
The phase can now easily be expressed as:
∠Ci( jω ,λ ) = arctan
(
Im(Ci( jω ,λ ))Re(Ci( jω ,λ ))
)
= arctan
ωωd
−ωi(λ )
ωλ sin(λπ2)
1+ωi(λ )
ωλ cos(λπ2)
.(13)
Using (13), ωi(λ ) can be found such that the phase of theFOC is set equal to the phase of the PID controller at ωcwhere ωc > 0. This can be expressed by:
∠Ci( jωc,λ ) := ∠C( jωc). (14)
Rewriting (14) to solve for ωi(λ ) gives:
ωi(λ ) =ωi(1)ωλ−1
c
sin(λπ2)+ cos(λ
π2)
(
ωc
ωd−
ωi(1)ωc
) . (15)
With ωi(λ ) found, the magnitude of Ci( jωc,λ ) can be setequal to the magnitude of the PID controller by a properchoice for kp(λ ). To find kp(λ ), an explicit expression forthis magnitude is thus needed. With (11), it follows that:
|Ci( jω ,λ )|=√
Re(Ci( jω ,λ ))2 + Im(Ci( jω ,λ ))2
= kp(λ )√
Ω2 +ΛΩ+ωc
ωd+ 1,
(16)
with Ω and Λ defined by:
Λ = 2
[
cos(λπ2)−
ωc
ωdsin(λ
π2)
]
Ω =ωi(λ )
ωλc
.(17)
With (16) and using:
|Ci( jωc,λ )| := |C( jωc)|, (18)
kp(λ ) follows from:
kp(λ ) =kp(1)
√
(
ωi(1)ωc
)2
+ωc − 2ωi(1)
ωd+ 1
√
Ω2 +ΛΩ+ωc
ωd+ 1
. (19)
Using (15) and (19) various controllers have been derived.The values of the fraction λ used for these controllers are λ ∈0.9,1,1.1. Again, the true FOI is approximated by a 30th
order Matsuda approximation on the interval [10−4,103] rad ·s−1. The Bode plots of these controllers in series connectionwith the low-pass filter Fl p from (7) are shown in Fig. 7.Different from Fig. 5, it can be seen that all controllers havecomparable phase and gain properties for ω ≥ ωc, with ωc =2π17 rad · s−1, hence comparable robust stability properties.Note that the phase margins are kept the same (by design)but the gain margins may still show small variations. Fig. 8clearly shows that the phase margins have been preserved bythe FOI design.
100
101
102
106
107
100
101
102
−150
−100
−50
0
50
|Ci(
jω)F
lp(
jω)|
∠C
i(j ω
)Flp(
jω)
inde
gree
s
Frequency in Hz
λ = 0.9λ = 1.0λ = 1.1
Fig. 7. Bode plots of fractional order PID-controllers Ci( jω)Fl p( jω).
−3 −2 −1 0 1−1
−0.5
0
0.5
1
ℑ
P(
jω)C
i(jω
)Flp(
jω)
ℜP( jω)Ci( jω)Fl p( jω)
λ = 0.9λ = 1.0λ = 1.1
Fig. 8. Nyquist plots of P( jω)Ci( jω)Fl p( jω).
The time responses when applying these controllers in adiscrete-time simulation are shown in Fig. 9. The (scaled)jerk profile is depicted as a means of reference. In simu-lation, a zero-order-hold discretisation scheme is used witha sampling frequency of 5 kHz. The figure shows a cleartrade-off in overshoot and settling times: lower integratororders induce smaller overshoot (less integrator wind-up) buta slower convergence to zero. At λ = 0 the controller hasreduced to a PD controller and thus looses the ability todecrease steady state errors. When increasing the order λbeyond the point where ωi(λ ) = ωd , the closed-loop systembecomes less damped and eventually becomes unstable. Asa rule of thumb we require that ωi(λ )≤ ωd .
VI. IMPLEMENTATION ASPECTS
In our case the FOI will be implemented using a second-order filter in series with the integrator action, i.e. a loop-shaping filter operation that significantly reduces implemen-tation complexity and that is clear to the motion controlengineer; see Table I for the validity of this approximation.The controller parameters ωi = ωi(λ ) and kp = kp(λ ) aredesigned under the assumption of a true FOI at ωc. Sincethe approximation only holds on a certain frequency intervaland the integrator action is also needed outside this interval,
981
![Page 5: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/5.jpg)
0.55 0.6 0.65 0.7 0.75 0.8 0.85−150
−100
−50
0
50
100
150
ein
µm
]
t in seconds
λ = 0.9λ = 1.0λ = 1.1
0.1d3r/dt3
Fig. 9. Simulated error responses of the closed-loop plant P( jω) in (8)with fractional PID-controllers Ci( jω)Fl p( jω).
TABLE IICONTROLLER PARAMETERS FOR λ ∈ 0.9,1.1
λ = 0.9 λ = 1.1ωi(λ) in rad · s−1 1.599 ·2π 5.9902πkp(λ) in N ·m−1 0.977 ·106 1.036 ·106
it is suggested in [8] to implement the FOI as:
s−λ = s−1s1−λ . (20)
The controller is then given by:
Ci(s) := kp(λ )(
1+ωi(λ )
sF(s)+
sωd
)
, (21)
where F(s), as defined in (5), is the second-order Matsudaapproximation of F(s). This implementation is studied forλ ∈ 0.9,1,1.1. The frequency interval of the approxima-tion is chosen to span two decades with ωc as its upperbound. The controller parameters ωi =ωi(λ ) and kp = kp(λ )are provided in Table II. Fig. 10 shows the Bode plots of theresulting controllers along with their 30th order counterparts,i.e. the true fractional order characteristics. Fig. 11 shows theNyquist plots of the resulting open-loop transfer functions.Fig. 12 shows the error responses of the nominal (λ = 1),the true (gray) and the approximated (black) fractional ordercases. The Bode plots, the Nyquist plots, and the errorsresponses of the approximated (and loop-shaping) filters aresimilar to the case of true fractional order control. This leadsto the conclusion that the implementation of a FOI can bedone with (21). Note that F in (21) can be seen as a loopshaping filter but with the physical interpretation of addingfractional integrator orders as to fine-tune between overshootand settling behavior. Because of the preservation of phasemargins, recall Section V, robustness to modelling errors ofthe fractional-order designs is comparable to the full-orderPID control design with λ = 1.
VII. WAFER STAGE EXAMPLE
To validate the results of the model, the designed con-trollers are tested on a real wafer stage system in the contextof the so-called chuck exchange problem. In this problem thewafer that has been exposed should be exchanged with thewafer that is going to be exposed. The exchange should be
100
101
102
106
107
100
101
102
−150
−100
−50
0
50
|Ci(
jω)F
lp(
jω)|
∠C
i(j ω
)Flp(
jω)
Frequency in Hz
λ = 0.9λ = 1.0λ = 1.1
Fig. 10. Bode plots of fractional order PID-controllers Ci( jω)Fl p( jω) withωc; the dashed and point-dashed curves are the approximations; the thick,grey underlying curves are their respective 30th order counterparts.
−3 −2 −1 0 1−1
−0.5
0
0.5
1
ℑ
P(
jω)C
i(jω
)Flp(
jω)
ℜP( jω)Ci( jω)Fl p( jω)
λ = 0.9λ = 1.0λ = 1.1
Fig. 11. Nyquist plots of P( jω)Ci( jω)Fl p( jω); the dashed and point-dashed curves are the approximations; the thick, grey underlying curves aretheir respective 30th order counterparts.
0.55 0.6 0.65 0.7 0.75 0.8 0.85−150
−100
−50
0
50
100
150
ein
µm
t in seconds
λ = 0.9λ = 1.0λ = 1.1
0.1d3r/dt3
Fig. 12. Simulated error responses of the closed-loop plant P( jω) in(8) with fractional PID-controllers Ci( jω)Fl p( jω) with ωc; the dashed andpoint-dashed curves are the approximations; the thick grey underlying curvesare their respective 30th order counterparts.
done in minimal time as to increase wafer throughput. Be-cause of the position-dependent behavior and plant variations
982
![Page 6: [IEEE 2014 American Control Conference - ACC 2014 - Portland, OR, USA (2014.6.4-2014.6.6)] 2014 American Control Conference - Design of a fractional-order integrator for high-precision](https://reader036.fdocument.org/reader036/viewer/2022073016/5750a10b1a28abcf0c908952/html5/thumbnails/6.jpg)
during the chuck exchange, feedforward control is of limiteduse and one generally resides to robust feedback control [4].
Among the controllers tested are the FOCs with λ ∈0.9,1,1.1 and their matching parameters ωi = ωi(λ ) andkp = kp(λ ) in Table II and (for the PID controller) in(1) with parameters ωi = 3 · 2π rad · s−1 and ωd = 12 ·2π rad · s−1. The FOIs are approximated with second-orderloop shaping filters with poles and zeros placed accordingto the Matsuda approximation on the frequency interval[0.17 ·2π ,17 ·2π ] rad · s−1.
The maximum absolute values of the error responsesin the decreasing time interval τ ∈ [t, tend] with tend = 0.5seconds of the wafer stage system using the controllers withFOI are shown in Fig. 13. Decreasing λ generally inducesless overshoot: 88 µm for λ = 0.8 in comparison with104.4 µm for λ = 1.2, i.e. a 19% reduction. The reducedovershoot comes at the cost of increased settling times. Toquantify this, consider a fixed error level for settling of43 µm, which is reached at 0.224 seconds for λ = 1.15while at 0.37 seconds for λ = 0.8, which is roughly 150milliseconds later. Qualitatively, the observed behaviour issimilar to the behaviour shown in Fig. 12 which was basedon simulation. We therefore conclude that the designed trade-off between overshoot and settling times by adapting theintegrator fraction is also found in the experiments. In the
0 0.224 0.37 0.50
43
88
104.4
120
max
(abs
(e(τ))
inµ
mfo
rτ∈[t,t
end]
t in seconds
0.800.850.900.951.001.051.101.151.20
Fig. 13. Measured error responses of the closed-loop waferstage system with fractional PID-controllers Ci( jω)Fl p( jω) for λ ∈0.8,0.85,0.9,0.95,1,1.05,1.1,1.15,1.2.
context of the chuck exchange problem, the reduction of thesettling times in the order of 150 milliseconds that occurs atseveral occasions during the chuck swap gives a throughputincrease of a few wafers/hour which is considered significant.
VIII. CONCLUSIONS
In view of the trade-offs between overshoot and settlingtimes, a FOI is shown to be effective. For the chuck exchangeproblem occurring in wafer scanning, the extra controlfreedom in choosing the integrator fraction can be used tofine-tune between these measures. Increasing the integratorfraction λ increases the overshoot, but decreases the settlingtimes whereas decreasing the integrator fraction decreasesthe overshoot but increases the settling times. When design-ing the FOI, simply changing the order of the integrator isshown to come at the risk of closed-loop stability. For thedeveloped design procedure, however, the control parameters
ωi = ωi(λ ) and kp = kp(λ ) are chosen with preservation ofcrossover frequencies and phase margins. As a result robuststability properties are largely maintained in the FOI design.Only the gain margins can still show variation, but thisvariation is generally negligible. The FOI is implementedusing a second-order loop shaping filter that is shown to bea fair approximation of the target fractional-order transferfunction. The controller complexity is kept low, i.e. the costof control remain low too. In addition, valuable insightsfrom fractional order control can be transferred to the loopshaping design and thus aid the control engineer in histuning tasks. For the chuck exchange problem, these insightsessentially show that improved time-domain performancecan be obtained by allowing for a limited increase of theintegrator fraction.
REFERENCES
[1] V. Badri, and M.S. Tavazoei, On tuning fractional order [proportional-derivative] controllers for a class of fractional order systems. Auto-matica, 2013, DOI:10.1016/j.automatica.2013.04.026.
[2] H. Butler, and C. de Hoon, Fractional-order filters for active dampingin a lithographic tool. Control Engineering Practice, Vol. 21, 2012, pp.413-419.
[3] M.F. Heertjes, B. Temizer, and M. Schneiders. Self-tuning in master-slave synchronization of high-precision stage systems. Control Engi-neering Practice, Vol. 21, 2013, pp. 1706-1715.
[4] M.F. Heertjes, and R. Verstappen, Self-tuning in integral sliding modecontrol with a Levenberg-Marquardt algorithm. Mechatronics, 2013,http://dx.doi.org/10.1016/j.mechatronics.2013.05.005.
[5] C.M. Ionescu, R. Caponetto, Y. Chen, J. Bourgeois, and M. deLabachelerie (guest editors), Special issue on fractional order modelingand control in mechatronics. Mechatronics, Vol. 23(7), 2013, pp. 739-892.
[6] Y. Luo, Y.Q. Chen, C.Y. Wang, and Y.G. Pi, Tuning fractional orderproportional integral controllers for fractional order systems. Journalof Process Control, Vol. 20, 2010, pp. 823-831.
[7] Y. Luo, Y.Q. Chen, H.S. Ahn, and Y.G. Pi, Fractional order robustcontrol for cogging effect compensation in PMSM position servo sys-tems: stability analysis and experiments. Control Engineering Practice,Vol. 18, 2010, pp. 1022-1036.
[8] C.A. Monje, A.J. Calderon, B.M. Vinagre, Y.Q. Chen, and V. Feliu,On fractional PIλ controllers: some tuning rules for robustness to plantuncertainties, Nonlinear Dynamics, Vol. 38, 2004, pp. 369-381.
[9] C.A. Monje, B.M. Vinagre, V. Feliu, and Y.Q. Chen, Tuning and auto-tuning of fractional order controllers for industry applications, ControlEngineering Practice, Vol. 16, 2008, pp. 798-812.
[10] Y.Q. Chen, I. Petras, and B. Vinagre, A List of Laplace and InverseLaplace Transforms Related to Fractional Order Calculus, 2001.
[11] A. Oustaloup, and M. Bansard, First generation CRONE control,Systems, Man and Cybernetics, Le Touquet, France, 1993, pp. 130-135.
[12] A. Oustaloup, B. Mathieu, and P. Lanusse, Second generation CRONEcontrol, Systems, Man and Cybernetics, Le Touquet, France, 1993, pp.136-142.
[13] P. Lanusse, A Oustaloup, and B. Mathieu, Third generation CRONEcontrol, Systems, Man and Cybernetics, Le Touquet, France, 1993, pp.149-155.
[14] I. Podlubny, Fractional differential equations: an introduction to frac-tional derivatives, fractional differential equations, to methods of theirsolution and some of their applications, Academic Press, San Diego,1999.
[15] C. Tricaud, and Y.Q. Chen, An approximate method for numericallysolving fractional order optimal control problems of general form,Computers and Mathematics with Applications, Vol. 59, 2010, pp.1644-1655.
[16] D. Xue, and Y.Q. Chen, A Comparative Introduction of Four Frac-tional Order Controllers, World Congress on Intelligent Control andAutomation, Vol. 4, 2002, pp. 3228-3253.
[17] D. Valerio, Fractional robust system control, PhD-thesis, InstitutoSuperior Tecnico, Universidade Tecnica de Lisboa, 2005.
[18] D. Valerio, and J.S. Da Costa, An introduction to fractional control,The Institution of Engineering and Technology, Croyden, UK, 2013.
[19] D.J. Wang, and X.L. Gau, H∞ design with fractional-order PDµ
controllers, Automatica, Vol. 48, 2012, pp. 974-977.[20] B.T. Zhang, and Y.G. Pi, Enhanced robust fractional order
proportional-plus-integral controller based on neural network velocitycontrol of permanent magnet synchronous motor, ISA Transactions,2013, http://dx.doi.org/10.1016/j.isatra.2013.02.003.
983