G eom etrie vectorielleedu.ge.ch/.../files/geometrie-vectorielle_0.pdf · 2017. 8. 24. · G eom...
16
G´ eom´ etrie vectorielle 1. L’espace vectoriel R n D´ efinition 1.1. Notons R n l’ensemble des n-tuples (x 1 ; ··· ; x n ) de nombre r´ eels. Nous notons les n-tuples par - → x , - → y , - → z , ··· et nous les appelons des vecteurs. Soient - → x , - → y ∈ R n et λ ∈ R. On d´ efinit (1) - → x + - → y =(x 1 + y 1 ; ··· ; x n + y n ) (2) λ · - → x =(λ · x 1 ; ··· ; λ · x n ) Exemple 1.2. R 2 d´ esigne l’ensemble des couples de nombres r´ eels (x 1 ; x 2 ) et R 3 d´ esigne l’ensemble des triplets de nombres r´ eels (x 1 ; x 2 ; x 3 ). Par exemple (1) (1; -2; 3.75) + (7.5; 1; -2) = (1 + 7.5; -2 + 1; 3.75 - 2) = (8.5; -1; 1.75) (2) -3 · (2; 3.5; -5) = (-3 · 2; -3 · 3.5; -3 · (-5)) Remarque 1.3. A chaque - → x ∈ R 2 on peut associer un point du plan en proc´ edant de la fa¸ con suivante: on place deux axes perpendiculaires gradu´ es et orient´ es et on associe `a - → x =(x 1 ; x 2 ) le point d’abscisse x 1 et d’ordonn´ ee x 2 (voir figure 1). 1 2 -1 -2 1 2 -1 -2 y=(6;2) x=(1;4) x+y=(7;6) -x=(-1;-4) -y=(-6;-2) x-y=(-5;2) y-x=(5;-2) -1.5y=(-9;-3) Figure 1. Remarquons que - → x + - → y s’obtient en mettant bout ` a bout les “fl` eches” reliant (0;0) `a - → x et (0;0)`a - → y . Par ailleurs, - - → x s’obtient en “renversant” la fl` eche de - → x . Finalement, 1.5 · (- - → y ) s’obtient en dilatant la fl` eche de - - → y d’un facteur 1.5. 1 Cours 3MA2DF02 - 2017-2018 (B. Ischi) 1
Transcript of G eom etrie vectorielleedu.ge.ch/.../files/geometrie-vectorielle_0.pdf · 2017. 8. 24. · G eom...

Geometrie vectorielle
1. L’espace vectoriel Rn
Definition 1.1. Notons Rn l’ensemble des n-tuples (x1; · · · ;xn) de nombre reels. Nousnotons les n-tuples par −→x , −→y , −→z , · · · et nous les appelons des vecteurs.
Soient −→x , −→y ∈ Rn et λ ∈ R. On definit
(1) −→x +−→y = (x1 + y1; · · · ;xn + yn)(2) λ · −→x = (λ · x1; · · · ;λ · xn)
Exemple 1.2. R2 designe l’ensemble des couples de nombres reels (x1;x2) et R3 designel’ensemble des triplets de nombres reels (x1;x2;x3). Par exemple
(1) (1;−2; 3.75) + (7.5; 1;−2) = (1 + 7.5;−2 + 1; 3.75− 2) = (8.5;−1; 1.75)(2) −3 · (2; 3.5;−5) = (−3 · 2;−3 · 3.5;−3 · (−5))
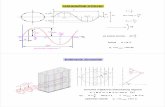
Remarque 1.3. A chaque −→x ∈ R2 on peut associer un point du plan en procedant de la faconsuivante: on place deux axes perpendiculaires gradues et orientes et on associe a −→x = (x1;x2) lepoint d’abscisse x1 et d’ordonnee x2 (voir figure 1).
1 2−1−2
1
2
−1
−2
y=(6;2)
x=(1;4)
x+y=(7;6)
−x=(−1;−4)
−y=(−6;−2)
x−y=(−5;2)
y−x=(5;−2)
−1.5y=(−9;−3)
Figure 1.
Remarquons que −→x + −→y s’obtient en mettant bout a bout les “fleches” reliant (0; 0) a −→x et(0; 0) a −→y . Par ailleurs, -−→x s’obtient en “renversant” la fleche de −→x . Finalement, 1.5 · (−−→y )s’obtient en dilatant la fleche de −−→y d’un facteur 1.5.
1Cours 3MA2DF02 - 2017-2018 (B. Ischi)
1

Inegalite de Cauchy-Schwarz (page 2/16)
Remarque 1.4. Dorenavant, nous noterons−→0 au lieu de (0; 0) ou (0; · · · ; 0).
Proposition 1.5. Soient −→x , −→y et −→z ∈ Rn et λ, µ ∈ R. Alors, (la demonstration est a faireen exercice)
(1) (−→x +−→y ) +−→z = −→x + (−→y +−→z ) (l’addition dans Rn est associative)
(2)−→0 +−→x = −→x +
−→0 (−→0 est l’element neutre)
(3) −→x −−→x = −−→x +−→x = 0(4) −→x +−→y = −→y +−→x (l’addition dans Rn est commutative)(5) (λ+ µ) · −→x = λ · −→x + µ · −→x(6) (λµ) · −→x = λ · (µ · −→x )(7) λ · (−→x +−→y ) = λ · −→x + λ · −→y(8) 1 · −→x = −→x
Remarque 1.6. Les proprietes 1 a 4 se resument en disant que Rn muni de l’addition desvecteurs est un groupe abelien. De meme, les proprietes 1 a 8 se resument en disant que Rn
muni de l’addition des vecteurs et de la multiplication par un nombre est un espace vectoriel.
2. Produit scalaire
Definition 2.7. Soient −→x et −→y ∈ Rn. On definit le produit scalaire de −→x et −→y par
−→x • −→y = x1 y1 + x2 y2 + · · ·+ xn yn
Definition 2.8. Soit −→x ∈ Rn. On definit la norme de −→x par
‖−→x ‖ =√−→x • −→x
Remarque 2.9. Soit −→x ∈ Rn. Remarquons que
‖−→x ‖ =√x2
1 + x22 + · · ·+ x2
n
Donc, par le theoreme de Pythagore, la norme de −→x est la longueur de la “fleche” reliant−→0 a −→x .
Proposition 2.10. Soient −→x , −→y et −→z ∈ Rn et λ ∈ R. Alors, (la demonstration est a faireen exercice)
(B1) (−→x +−→y ) • −→z = −→x • −→z +−→y • −→z(B2) (λ · −→x ) • −→y = λ (−→x • −→y )
(S) −→x • −→y = −→y • −→x (le produit scalaire est symetrique)
(DP) −→x • −→x > 0 ∀ −→x 6= −→0 (le produit scalaire est defini positif)
Remarque 2.11. Les proprietes du produit scalaire enoncees ci-dessus se resument en disantque le produit scalaire est une forme bilineaire (proprietes B1 et B2 a gauche et a droite),symetrique (propriete S), definie positive (propriete DP).
3. Inegalite de Cauchy-Schwarz
Theoreme 3.12. (Inegalite de Cauchy-Schwarz) Soient −→x et −→y ∈ Rn. Alors, on a l’inegalite
|−→x • −→y | ≤ ‖−→x ‖ ‖−→y ‖

Angle entre des vecteurs (page 3/16)
Demonstration. Posons
f(t) = ‖−→x − t · −→y ‖2
Par definition, f(t) ≥ 0 pour tout t. Remarquons que si −→y =−→0 l’inegalite est vraie. Par
consequent, nous pouvons supposer pour la suite que −→y 6= −→0 .Par ailleurs, par les proprietes B1, B2 et S du produit scalaire, nous trouvons que
f(t) = ‖−→x − t · −→y ‖2
= (−→x − t · −→y ) • (−→x − t · −→y )
= −→x • −→x − 2(t · −→y ) • −→x + t2(−→y • −→y )
= ‖−→y ‖2t2 − 2(−→y • −→x )t + ‖−→x ‖2
= at2 + bt + c
ou a = ‖−→y ‖2, b = −2(−→x • −→y ) et c = ‖−→x ‖2.Donc le graphe de f est une parabole convexe (car par les axiomes D et P, a > 0) qui
coupe l’axe horizontal au plus en un seul point. Par consequent, nous savons que le discriminant∆ = b2 − 4ac ≤ 0. Or
b2 − 4ac ≤ 0⇒ (−2(−→x • −→y ))2 − 4‖−→y ‖2‖−→x ‖2 ≤ 0
⇒ 4(−→x • −→y )2 ≤ 4‖−→x ‖2‖−→y ‖2
⇒ |−→x • −→y |2 ≤ ‖−→x ‖2‖−→y ‖2
⇒ |−→x • −→y | ≤ ‖−→x ‖‖−→y ‖
�
4. Angle entre des vecteurs
Proposition 4.13. Soient −→x , −→y ∈ R3 et α l’angle “entre la fleche reliant−→0 a −→x et la fleche
reliant−→0 a −→y ”. Alors
−→x • −→y = cos(α)‖−→x ‖ ‖−→y ‖
Demonstration. Commencons par remarquer que
‖−→x −−→y ‖ =√
(x1 − y1)2 + (x2 − y2)2 + (x3 − y3)2
donne la distance euclidienne entre les points −→y et −→x , c’est-a-dire la longueur du segment [−→x−→y ].
De meme, ‖−→x ‖ =√x2
1 + x22 + x2
3 donne la distance euclidienne entre−→0 et −→x . Finalement,
‖−→y ‖ =√y2
1 + y22 + y2
3 donne la distance euclidienne entre−→0 et −→y .
Par consequent, en appliquant le theoreme du cosinus au triangle−→0 −→x−→y , nous trouvons que
‖−→x −−→y ‖2 = ‖−→x ‖2 + ‖−→y ‖2 − 2 cos(α)‖−→x ‖ ‖−→y ‖

Produit vectoriel (page 4/16)
x
y
1
2
3
x3x1
x2y3
y2
y1x2−y2
y1−x1
0
Figure 2. Soustraction de deux vecteurs
c’est-a-dire,
x21 + x2
2 + x23 + y2
1 + y22 + y2
3 − 2 cos(α)‖−→x ‖ ‖−→y ‖ = (x1 − y1)2 + (x2 − y2)2 + (x3 − y3)2
= x21 − 2x1y1 + y2
1 + x22 − 2x2y2 + y2
2 + x23 − 2x3y3 + y2
3
⇒ −2 cos(α)‖−→x ‖ ‖−→y ‖ = −2x1y1 − 2x2y2 − 2x3y3
⇒ cos(α)‖−→x ‖ ‖−→y ‖ = x1y1 + x2y2 + x3y3
⇒ cos(α)‖−→x ‖ ‖−→y ‖ = −→x • −→y
�
5. Produit vectoriel
1. Definition.
Definition 5.14. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b; 3) ∈ R3. On definit le produit
vectoriel de ~a et ~b par
~a×~b =
a1
a2
a3
× b1
b2
b3
=
a2b3 − a3b2
−[a1b3 − a3b1]a1b2 − a2b1
Exemple 5.15. Notons ~e1 = (1; 0; 0), ~e2 = (0; 1; 0) et ~e3 = (0; 0; 1). Alors,
~e1 × ~e2 =
100
× 0
10
=
001
= ~e3
Remarque 5.16. On note parfois ~a ∧~b au lieu de ~a×~b.

Produit vectoriel (page 5/16)
2. Proprietes.
Proposition 5.17. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b3) ∈ R3. Alors
~a×~b = −(~b× ~a)
Demonstration.
~b× ~a =
b1
b2
b3
× a1
a2
a3
=
b2a3 − b3a2
−[b1a3 − b3a1]b1a2 − b2a1
= −~a×~b
�
Proposition 5.18. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b3) ∈ R3. Alors
(λ · ~a)×~b = λ(~a×~b)
Demonstration.
(λ · ~a)×~b =
λa1
λa2
λa3
× b1
b2
b3
=
λa2b3 − λa3b2
−[λa1b3 − λa3b1]λa1b2 − λa2b1
= λ(~a×~b)
�
Proposition 5.19. Soient ~a = (a1; a2; a3), ~b = (b1; b2; b3) et ~c = (c1; c2; c3) ∈ R3. Alors
~a× (~b+ ~c) = (~a×~b) + (~a× ~c)
Demonstration.
~a× (~b+ ~c) =
a1
a2
a3
× b1 + c1
b2 + c2
b3 + c3
=
a2(b3 + c3)− a3(b2 + c2)−[a1(b3 + c3)− a3(b1 + c1)]a1(b2 + c2)− a2(b1 + c1)
= ~a×~b+ ~a× ~c
�
Proposition 5.20. Soient ~a = (a1; a2; a3), ~b = (b1; b2; b3) et ~c = (c1; c2; c3) ∈ R3. Alors
(~a+~b)× ~c = (~a× ~c) + (~b× ~c)
Demonstration.
(~a+~b)× ~c = −~c× (~a+~b) = −(~c× ~a)− (~c×~b) = (~a× ~c) + (~b× ~c)
�
Proposition 5.21. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b3) ∈ R3. Alors
(~a×~b) • ~a = 0 = (~a×~b) •~b
c’est-a-dire, ~a×~b est orthogonal a ~a et ~b

Produit vectoriel (page 6/16)
Demonstration.
(~a×~b) • ~a =
a1
a2
a3
× b1
b2
b3
• a1
a2
a3
=
a2b3 − a3b2
−[a1b3 − a3b1]a1b2 − a2b1
• a1
a2
a3
= a1(a2b3 − a3b2)− a2(a1b3 − a3b1) + a3(a1b2 − a2b1)
= a1a2b3 − a1a3b2 − a2a1b3 + a2a3b1 + a3a1b2 − a3a2b1 = 0
�
Proposition 5.22. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b3) ∈ R3. Alors
‖~a×~b‖2 = ‖~a‖2‖~b‖2 − (~a •~b)2
Demonstration. Remarquons que
‖~a×~b‖2 = (a2b3 − a3b2)2 + (a1b3 − a3b1)2 + (a1b2 − a2b1)2
= a22b
23 − 2a2b3a3b2 + a2
3b22 + a2
1b23 − 2a1b3a3b1 + a2
3b21 + a2
1b22 − 2a1b2a2b1 + a2
2b21
De plus,
‖~a‖2‖~b‖2 − (~a •~b)2 = (a21 + a2
2 + a23)(b2
1 + b22 + b2
3)− (a1b1 + a2b2 + a3b3)2
= a21b
21 + a2
1b22 + a2
1b23 + a2
2b21 + a2
2b22 + a2
2b23 + a2
3b21 + a2
3b22 + a2
3b23
−a21b
21 − a2
2b22 − a2
3b23 − 2a1b1a2b2 − 2a1b1a3b3 − 2a2b2a3b3
= a21b
22 + a2
1b23 + a2
2b21 + a2
2b23 + a2
3b21 + a2
3b22
−2a1b1a2b2 − 2a1b1a3b3 − 2a2b2a3b3
= ‖~a×~b‖2
�
Proposition 5.23. Soient ~a = (a1; a2; a3) et ~b = (b1; b2; b3) ∈ R3. Alors
‖~a×~b‖ = ‖~a‖ · ‖~b‖ · sin(α)
ou α est l’angle (0 ≤ α ≤ 180◦) entre la fleche reliant l’origine a ~a et la fleche reliant l’origine a~b.

Produit vectoriel (page 7/16)
Demonstration. Par la formule reliant l’angle entre deux vecteurs au produit scalaire, ontrouve
‖~a×~b‖2 = ‖~a‖2‖~b‖2 − (~a •~b)2
= ‖~a‖2‖~b‖2 − (cos(α)‖~a‖‖~b‖)2
= ‖~a‖2‖~b‖2 − cos(α)2‖~a‖2‖~b‖2
= ‖~a‖2‖~b‖2[1− cos(α)2
]= ‖~a‖2‖~b‖2 sin(α)2
Comme 0 ≤ α ≤ 180◦, on obtient
‖~a×~b‖ = ‖~a‖ · ‖~b‖ · sin(α)
�
Proposition 5.24.
~a× (~b× ~c) = (~a • ~c)~b− (~a •~b)~c ∀ ~a, ~b, ~c ∈ R3
Demonstration. Nous trouvons d’une part:
~a× (~b× ~c) =
a1
a2
a3
×b1
b2
b3
×c1
c2
c3
=
a1
a2
a3
× b2c3 − b3c2
−(b1c3 − b3c1)b1c2 − b2c1
=
a2(b1c2 − b2c1)− a3(−(b1c3 − b3c1))−[a1(b1c2 − b2c1)− a3(b2c3 − b3c2)]a1(−(b1c3 − b3c1))− a2(b2c3 − b3c2)
=
a2b1c2 − a2b2c1 + a3b1c3 − a3b3c1
−a1b1c2 + a1b2c1 + a3b2c3 − a3b3c2
−a1b1c3 + a1b3c1 − a2b2c3 + a2b3c2
et d’autre part:
(~a • ~c)~b− (~a •~b)~c = (a1c1 + a2c2 + a3c3)
b1
b2
b3
− (a1b1 + a2b2 + a3b3)
c1
c2
c3
=
(a1c1 + a2c2 + a3c3)b1 − (a1b1 + a2b2 + a3b3)c1
(a1c1 + a2c2 + a3c3)b2 − (a1b1 + a2b2 + a3b3)c2
(a1c1 + a2c2 + a3c3)b3 − (a1b1 + a2b2 + a3b3)c3
=
a1c1b1 + a2c2b1 + a3c3b1 − a1b1c1 − a2b2c1 − a3b3c1
a1c1b2 + a2c2b2 + a3c3b2 − a1b1c2 − a2b2c2 − a3b3c2
a1c1b3 + a2c2b3 + a3c3b3 − a1b1c3 − a2b2c3 − a3b3c3
=
a2c2b1 + a3c3b1 − a2b2c1 − a3b3c1
a1c1b2 + a3c3b2 − a1b1c2 − a3b3c2
a1c1b3 + a2c2b3 − a1b1c3 − a2b2c3
=
a2b1c2 + a3b1c3 − a2b2c1 − a3b3c1
a1b2c1 + a3b2c3 − a1b1c2 − a3b3c2
a1b3c1 + a2b3c2 − a1b1c3 − a2b2c3

Le produit mixte (page 8/16)
ce qui acheve la demonstration de l’egalite:
~a× (~b× ~c) = (~a • ~c)~b− (~a •~b)~c
�
3. Interpretation geometrique.
La norme du produit vectoriel ‖~a×~b‖ est egale a l’aire du
parallelogramme construit sur ~a et ~b. En effet (voir figureci-contre),
Apara = base×hauteur = ‖~a‖ ·h = ‖~a‖ sin(α)‖~b‖ = ‖~a×~b‖
En resume, le vecteur ~a ×~b est orthogonal a ~a et a ~b (90◦
entre ~a ×~b et ~a et 90◦ entre ~a ×~b et ~b) ce qui determinesa direction. Sa longueur (sa norme) est egale a l’aire
du parallelogramme construit sur ~a et ~b. Finalement, sonsens est determine par la “regle du tire-bouchon” ou, demaniere equivalente, par la “regle de la main droite”: si ~a
est represente par le pouce de la main droite et ~b par les
autres doigts, alors, ~a × ~b “sort” de la paume de la maindroite.
6. Le produit mixte
Definition 6.25. Soient ~a, ~b et ~c ∈ R3, On definit le produit mixte de ~a, ~b et ~c par
[~a;~b;~c] := (~a×~b) • ~c
1. Interpretation geometrique.La valeur absolue du produit mixte
|[~a;~b;~c]|
est egale au volume du parallelepipede construit sur ~a, ~b et~c. En effet,
Vpara = base× hauteur = ‖~a×~b‖ · h
= ‖~a×~b‖ · ‖~c‖| cos(α)| = |(~a×~b
)• ~c| = |[~a;~b;~c]|
Corollaire 6.26. Soient ~a, ~b et ~c ∈ R3. Alors,
[~a;~b;~c] = 0 ⇔ ~a, ~b et ~c sont coplanaires
c’est-a-dire, si et seulement si les vecteurs ~a, ~b et ~c sont lineairement dependants.
En particulier,
[~a;~a;~c] = 0 = [~a;~b;~b] = 0 = [~a;~b;~a]

Le produit mixte (page 9/16)
2. Proprietes du produit mixte.
Proposition 6.27. Soient ~a, ~b et ~c ∈ R3. Alors
[~a;~b;~c] = [~b;~c;~a] = [~c;~a;~b]
Le produit mixte est invariant sous permutations circulaires de ses arguments.
Demonstration. On a
[~a;~b;~c] =(~a×~b
)• ~c =
a1
a2
a3
×b1
b2
b3
•c1
c2
c3
=
a2b3 − a3b2
a3b1 − a1b3
a1b2 − a2b1
•c1
c2
c3
= c1 (a2b3 − a3b2) + c2 (a3b1 − a1b3) + c3 (a1b2 − a2b1)
= c1a2b3 − c1a3b2 + c2a3b1︸ ︷︷ ︸−c2a1b3 + c3a1b2 − c3a2b1
Par ailleurs,
[~b;~c;~a] =(~b× ~c
)• ~a =
b1
b2
b3
×c1
c2
c3
•a1
a2
a3
=
b2c3 − b3c2
b3c1 − b1c3
b1c2 − b2c1
•a1
a2
a3
= a1 (b2c3 − b3c2) + a2 (b3c1 − b1c3) + a3 (b1c2 − b2c1)
= a1b2c3 − a1b3c2 + a2b3c1 − a2b1c3 + a3b1c2︸ ︷︷ ︸− a3b2c1
ce qui montre que
[~a;~b;~c] = [~b;~c;~a]
et par consequent egalement que
[~a;~b;~c] = [~b;~c;~a] = [~c;~a;~b]
�
Proposition 6.28. Soient ~a, ~b et ~c ∈ R3. Alors,
[~a;~b;~c] = −[~b;~a;~c]
[~a;~b;~c] = −[~a;~c;~b]
[~a;~b;~c] = −[~c;~b;~a]
Le produit mixte change de signe sous transposition de deux de ses arguments (permutation deseulement deux arguments).

Droites (page 10/16)
Demonstration. Comme le produit vectoriel est anti-commutatif, par definition du produitmixte, il suit que
[~a;~b;~c] =(~a×~b
)• ~c = −
(~b× ~a
)• ~c = −[~b;~a;~c]
De plus, en vertu de l’invariance du produit mixte sous permutations circulaires de ses argument,il suit que
[~a;~b;~c] = [~b;~c;~a] = −[~c;~b;~a] = −[~a;~c;~b]
et[~a;~b;~c] = [~c;~a;~b] = −[~a;~c;~b] = −[~c;~b;~a]
�
Proposition 6.29. Pour tous les vecteurs ~a, ~b, ~c, ~x, ~y ∈ R3 et tous les nombres λ, µ ∈ R,on a
[λ~x+ µ~y;~b;~c] = λ[~x;~b;~c] + µ[~y;~b;~c]
[~a;λ~x+ µ~y;~c] = λ[~a; ~x;~c] + µ[~a; ~y;~c]
[~a;~b;λ~x+ µ~y] = λ[~a;~b; ~x] + µ[~a;~b; ~y]
Le produit mixte est lineaire dans chacun de ses arguments: c’est une forme trilineaire.
Demonstration. Par definition et en vertu de la distributivite du produit scalaire surl’addition des vecteurs, il suit que
[~a;~b;λ~x+ µ~y] =(~a×~b
)• (λ~x+ µ~y) = λ
(~a×~b
)• ~x+ µ
(~a×~b
)• ~y = λ[~a;~b; ~x] + µ[~a;~b; ~y]
De plus, de l’invariance du produit mixte sous permutations circulaires, il suit, par exemple, que,
[λ~x+ µ~y;~b;~c] = [~b;~c;λ~x+ µ~y] = λ[~b;~c; ~x] + µ[~b;~c; ~y] = λ[~x;~b;~c] + µ[~y;~b;~c]
�
7. Droites
1. Representation parametrique.
Definition 7.30. Soient A, ~v ∈ R3. La droite de l’espace passant par le point A et de vecteurdirecteur ~v est le sous-ensemble de R3 defini par
d(A,~v) ={Q ∈ R3
∣∣∣ Q = A+ λ~v, λ ∈ R}
En notant
A =
A1
A2
A3
et ~v =
v1
v2
v3
et Q =
xyz
l’egalite ci-dessus devient x = A1 + λv1
y = A2 + λv2
z = A3 + λv3
, λ ∈ R
Ce systeme d’equations est appele representation parametrique de la droite d(A,~v).

Droites (page 11/16)
Proposition 7.31. Soient Q, A, ~v ∈ R3. Notons−→AQ = Q− A. Alors
Q ∈ d(A,~v)⇔−→AQ× ~v = ~0
Demonstration. Par definition,
Q ∈ d(A~v) ⇔ ∃λ ∈ R∣∣∣ Q = A+ λ~v
⇔ ∃λ ∈ R∣∣∣ Q− A = λ~v
⇔−→AQ et ~v sont colineaires
⇔−→AQ× ~v = ~0
�
Remarque 7.32. On a
d(A,~v) = d(A, λ~v), ∀ λ ∈ R∗
En mots, tout multiple non nul du vecteur directeur d’une droite est un vecteur directeur dela meme droite. En d’autres termes, on peut multiplier le vecteur directeur d’une droite parn’importe quel nombre different de zero sans modifier la droite.
2. Equations cartesiennes.Reprenons une representation parametrique de la droite d(A,~v):xy
z
=
A1
A2
A3
+ λ
v1
v2
v3
⇒
x = A1 + λv1
y = A2 + λv2
z = A3 + λv3
Si
v1 6= 0 6= v2 6= 0 6= v3 ⇒
λ =x− A1
v1
λ =y − A2
v2
λ =z − A3
v3
⇒ x− A1
v1
=y − A2
v2
=z − A3
v3
Ces equations sont appelees les equations cartesiennes de la droite d(A,~v).De meme, si, par exemple,
v1 = 0 6= v2 6= 0 6= v3 ⇒
x = A1
λ =y − A2
v2
λ =z − A3
v3
⇒ x = A1 ety − A2
v2
=z − A3
v3

Droites (page 12/16)
3. Angle aigu entre deux droites.On definit l’angle entre deux droites
d1(A1, ~v1) et d2(A2, ~v2)
comme l’angle aigu entre les vecteurs directeurs ~v1 et ~v2.On peut calculer cet angle de deux manieres:
‖~v1 × ~v2‖ = sin(α)‖~v1‖‖~v2‖ ⇒ α = arcsin
(‖~v1 × ~v2‖‖~v1‖‖~v2‖
)ou
|~v1 • ~v2| = cos(α)‖~v1‖‖~v2‖ ⇒ α = arccos
(|~v1 • ~v2|‖~v1‖‖~v2‖
)Remarque 7.33. Remarquons que si deux droites sont paralleles, c’est-a-dire
~v1 × ~v2 = ~0
alors
α = arcsin
(‖~v1 × ~v2‖‖~v1‖‖~v2‖
)= arcsin
(0
‖~v1‖‖~v2‖
)= 0
4. Distance entre un point et une droite.On considere une droite d(a,~v) passant par un point A et devecteur directeur ~v ainsi qu’un point P . La distance entrela droite d(A,~v) et le point P , notee δ(P, d), est definiecomme la distance entre le point P et le point de la droitele plus proche de P . Elle correspond a la hauteur h duparallelogramme de la figure ci-contre. Par consequent,
Apara = base× hauteur = h · ‖~v‖ = δ(P, d) · ‖~v‖
et en vertu d’un resultat demontre plus haut,
‖−→AP × ~v‖ = Apara ⇒ δ(P, d) =
‖−→AP × ~v‖‖~v‖
5. Distance entre deux droites non paralleles.On considere deux droites
d1(A1, ~v1) et d2(A2, ~v2)
non paralleles, c’est-a-dire telles que~v1 × ~v2 6= ~0
La droite d1 passe par le point A1 et a comme vecteur directeur le vecteur ~v1 et la droite d2 passepar le point A2 et a comme vecteur directeur le vecteur ~v2. Sans perte de generalite, on peutsupposer que la droite d1 est confondue avec l’axe des x et que la droite d2 est dans un planparallele au plan
Πxy =
xyz
∈ R3∣∣∣ z = 0

Droites (page 13/16)
(voir figure 3). La distance entre d1 et d2, que nous notons δ(d1; d2), est la plus courte distanceentre deux points de d1 et d2. Elle correspond a la hauteur du parallelepipede construit sur la
vecteurs ~v1, ~v2 et−−−→A1A2 (voir figure 3). Comme nous l’avons demontre plus haut, le volume du
parallelepipede est donne par la valeur absolue du produit mixte
Vpara = |[−−−→A1A2;~v1;~v2]| = base× hauteur = ‖~v1 × ~v2‖ · δ(d1; d2) ⇒ δ(d1; d2) =
|[−−−→A1A2;~v1;~v2]|‖~v1 × ~v2‖
Figure 3. Distance entre deux droites non paralleles.
6. Positions relatives de deux droites.On considere deux droites
d1(A1, ~v1) et d2(A2, ~v2)
La droite d1 passe par le point A1 et a comme vecteur directeur le vecteur ~v1 et la droite d2 passepar le point A2 et a comme vecteur directeur le vecteur ~v2.
Ces droites peuvent etre
• confondues,• paralleles (pas confondues),• pas paralleles et secantes (elles se croisent),• gauches (pas paralleles et pas secantes, elles ne se croisent pas et elles ne sont pas par-
alleles).
Dans tous les cas, on peut calculer l’angle entre les droites.Pour determiner dans quelle situation on se trouve, il faut suivre la procedure suivante:

Plans (page 14/16)
(1) On calcule {~v1 × ~v2 = ~0 ⇒ d1 ‖ d2
~v1 × ~v2 6= ~0 ⇒ d1 6‖ d2
(2) Si d1 ‖ d2, on calcule la distance entre les droites d1 et d2 avec la formule
δ(d1; d2) = δ(d1, A2) =‖−−−→A1A2 × ~v1‖‖~v1‖
Si δ(d1; d2) = 0, alors d1 et d2 sont confondues. Sinon, elles sont paralleles.(3) Si d1 6‖ d2, on calcule la distance entre les droites avec la formule
δ(d1; d2) =|[−−−→A1A2;~v1;~v2]|‖~v1 × ~v2‖
Si δ(d1; d2) 6= 0, alors les deux droites d1 et d2 sont gauches.(4) Si δ(d1; d2) = 0, alors les deux droites sont secantes et il faut trouver leur point d’inter-
section en resolvant le systeme d’equations
A1 + λ~v1 = A2 + µ~v2 ⇒ λ~v1 − µ~v2 = A2 − A1 =−−−→A1A2
En notant
~v1 =
v1x
v1y
v1z
, ~v2 =
v2x
v2y
v2z
et−−−→A1A2 =
axayaz
Le systeme d’equations secrit
λv1x − µv2x = ax
λv1y − µv2y = ay
λv1z − µv2z = az
C’est un systeme de trois equations a deux inconnues. Nous savons qu’il admet unesolution (car δ(d1; d2) = 0). Il suffit donc de considerer deux de ces trois equations,d’eliminer λ (respectivement µ) et de determiner µ (respectivement λ) puis de substituerla valeur trouvee pour µ (respectivement λ) dans la representation parametrique de d2
(respectivement d1) pour trouver les coordonnees du point d’intersection.(5) Dans tous les cas, on peut calculer l’angle entre les droites d1 et d2.
8. Plans
1. Representation parametrique.
Definition 8.34. Soient A, ~v et ~w ∈ R3. Le plan contenant le point A et de vecteursdirecteurs ~v et ~w est le sous-ensemble de R3 defini par
Π(A,~v, ~w) ={Q ∈ R3
∣∣∣ Q = A+ λ~v + µ~w, λ, µ ∈ R}

Plans (page 15/16)
En notant
A =
A1
A2
A3
, ~v =
v1
v2
v3
, ~w =
w1
w2
w3
et Q =
xyz
l’egalite ci-dessus devient x = A1 + λv1 + µw1
y = A2 + λv2 + µw2
z = A3 + λv3 + µw3
, λ, µR
Ce systeme d’equations est appele representation parametrique du plan Π(A,~v, ~w).
Remarque 8.35. On a
Π(A,~v, ~w) = Π(A, λ~v, µ~w), ∀ λ, µ ∈ R∗
En mots, tout multiple non nul du vecteur directeur d’un plan est un vecteur directeur du memeplan. En d’autres termes, on peut multiplier les vecteurs directeurs d’un plan par n’importe quelsnombres differents de zero sans modifier le plan.
2. Vecteur normal a un plan.
Definition 8.36. Un vecteur ~n ∈ R3 est normal au plan Π(A,~v, ~w) si
~n •−→AQ = 0, ∀ Q ∈ Π(A,~v, ~w)
c’est-a-dire si ~n est orthogonal a−→AQ pour tout point Q du plan. Si ~n est un vecteur normal au
plan Π(A,~v, ~w), on note
~n ⊥ Π(A,~v, ~w)
Exemple 8.37. Le vecteur
~n = ~v × ~w
est normal au plan Π(A,~v, ~w). En effet, pour tout point Q ∈ Π(A,~v, ~w), on a
−→AQ = Q− A = A+ λ~v + µ~w − A = λ~v + µ~w
et (~v × ~w) • (λ~v + µ~w) = λ (~v × ~w) • ~v︸ ︷︷ ︸=0
+µ (~v × ~w) • ~w︸ ︷︷ ︸=0
= 0
car, comme nous l’avons demontre plus haut, le produit vectoriel de deux vecteurs est orthogonala chacun des vecteurs.
3. Equations cartesiennes.Soit
~n =
n1
n2
n3
⊥ Π(A,~v, ~w)

Plans (page 16/16)
un vecteur normal au plan Π(A,~v, ~w). Alors,
Q =
xyz
∈ Π(A,~v, ~w) ⇐⇒ ~n •−→AQ = 0
⇐⇒ ~n • (Q− A) = 0
⇐⇒ ~n •Q− ~n • A = 0
⇐⇒
n1
n2
n3
•xyz
−n1
n2
n3
•A1
A2
A3
= 0
⇐⇒ n1x+ n2y + n3z − (n1A1 + n2A2 + n3A3) = 0
Par consequent,
Π(A,~v, ~w) =
xyz
∈ R3∣∣∣ n1x+ n2y + n3z − (n1A1 + n2A2 + n3A3) = 0
Cette equation est appelee equation cartesienne du plan Π(A,~v, ~w).
4. Angle entre deux plans.
Definition 8.38. On definit l’angle entre deux plans
Π1(A1, ~v1, ~w1) et Π2(A2, ~v2, ~w2)
comme l’angle aigu entre deux vecteurs normaux
~n1 ⊥ Π1(A1, ~v1, ~w2) et ~n2 ⊥ Π2(A2, ~v2, ~w2) ⇒ α = arcsin
(‖~n1 × ~n2‖‖~n1‖‖~n2‖
)= arccos
(|~n1 • ~n2|‖~n1‖‖~n2‖
)5. Positions relatives de deux plans.Deux plans
Π1(A1, ~v1, ~w1) et Π2(A2, ~v2, ~w2)
peuvent etre paralleles (angle nul), confondus (angle nul et intersection non vide) ou secants (anglenon nul).
Soient deux vecteurs normaux
~n1 ⊥ Π1(A1, ~v1, ~w2) et ~n2 ⊥ Π2(A2, ~v2, ~w2)
Si les plans ne sont pas paralleles ou confondus, alors leur intersection est une droite qui a pourvecteur directeur le vecteur
~n1 × ~n2
En d’autres termes, si Z est un point qui appartient aux deux plans, alors la droite d’intersectionest donnee par
Π1(A1, ~v1, ~w1) ∩ Π2(A2, ~v2, ~w2) = d(Z,~n1 × ~n2)



![arXiv:math/0609407v2 [math.AP] 26 Mar 2007 · Italy, e-mail: a.pomponio@poliba.it 1. 2 A. Azzollini and A. Pomponio (V1) V ∈ C(RN,R); (V2) C1 6 V(x) 6 C2, for all x∈ RN; (V3)](https://static.fdocument.org/doc/165x107/60912109b913de0c7b2b8244/arxivmath0609407v2-mathap-26-mar-2007-italy-e-mail-apomponiopolibait-1.jpg)