Funnel cruise control - math.uni-hamburg.de filefakult t f rÊmathematik,Êinformatik...
17
fakultät für mathematik, informatik und naturwissenschaften Thomas Berger , Anna-Lena Rauert Funnel cruise control
Transcript of Funnel cruise control - math.uni-hamburg.de filefakult t f rÊmathematik,Êinformatik...

fakultät
für mathematik, informatik
und naturwissenschaften
Thomas Berger, Anna-Lena Rauert
Funnel cruise control

fakultät
für mathematik, informatik
und naturwissenschaften
Vehicle following framework
xsafe(t)v(t)
x(t)
xl(t)
LeaderFollower
x(t) = v(t), mv(t) = u(t)− Fg (t)− Fa(t, v(t)
)− Fr
(v(t)
)forces due to gravity: Fg (t) = mg sin θ(t)
aerodynamic drag : Fa(t, v) =12ρ(t)CdAv
2
rolling friction : Fr (v) = mgCr sgn(v)
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 2 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Control objective
xsafe(t)v(t)
x(t)
xl(t)
LeaderFollower
given: favourite speed vref(t), safety distance xsafe(t) = λ1v(t)+ λ2
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 2 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Control objective
xsafe(t)v(t)
x(t)
xl(t)
LeaderFollower
given: favourite speed vref(t), safety distance xsafe(t) = λ1v(t)+ λ2
Aim: u(t) = F(t, v(t), xl(t)− x(t)
)s.t.
(O1) xl(t)− x(t) ≥ xsafe(t),
(O2) |v(t)− vref(t)| is as small as possible such that (O1) is notviolated.
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 2 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
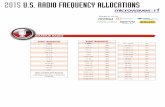
Funnel Control
System
u(t) = −k(t)e(t) +
y(t)u(t)
−yref(t)e(t)
t
1/ϕ(t)
|e(t)|
k(t) =1
1− ϕ(t)2e(t)2
[Ilchmann, Ryan, Sangwin ’02]:Works, if
relative degree = 1
stable internal dynamics
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 3 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Funnel cruise control
Velocity Control Distance Control
xsafe(t)ϕd(t)−1
( )
Leader
Leader
Follower
Follower
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 4 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Velocity funnel control
tracking error: ev (t) = v(t)− vref(t) ∈ Fv (t) :=(−ϕv (t)
−1, ϕv (t)−1)
→ treat v(t) as output of the system
v(t) = 1mu(t) + fv
(t, v(t)
)controller:
uv (t) = −kv (t)ev (t),
kv (t) =1
1− ϕv (t)2ev (t)2
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 5 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Distance funnel control
tracking error: ed(t) = x(t)− xl(t) + xsafe(t) + ϕd(t)−1
∈ Fd(t) :=(−ϕd(t)
−1, ϕd(t)−1)
output: y(t) = λ1v(t) + x(t),
reference signal: yref(t) = xl(t)− λ2 − ϕd(t)−1
x(t) = v(t) = − 1λ1x(t) + 1
λ1y(t),
y(t) = λ1m u(t) + fd
(t, x(t), y(t)
)controller: ud(t) = −kd(t)ed(t),
kd(t) =1
1− ϕd(t)2ed(t)2
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 6 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Distance funnel control
tracking error: ed(t) = x(t)− xl(t) + xsafe(t) + ϕd(t)−1
∈ Fd(t) :=(−ϕd(t)
−1, ϕd(t)−1)
output: y(t) = λ1v(t) + x(t),
reference signal: yref(t) = xl(t)− λ2 − ϕd(t)−1
x(t) = v(t) = − 1λ1x(t) + 1
λ1y(t),
y(t) = λ1m u(t) + fd
(t, x(t), y(t)
)controller: ud(t) = −kd(t)ed(t),
kd(t) =1
1− ϕd(t)2ed(t)2
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 6 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Distance funnel control
tracking error: ed(t) = x(t)− xl(t) + xsafe(t) + ϕd(t)−1
∈ Fd(t) :=(−ϕd(t)
−1, ϕd(t)−1)
output: y(t) = λ1v(t) + x(t),
reference signal: yref(t) = xl(t)− λ2 − ϕd(t)−1
x(t) = v(t) = − 1λ1x(t) + 1
λ1y(t),
y(t) = λ1m u(t) + fd
(t, x(t), y(t)
)controller: ud(t) = −kd(t)ed(t),
kd(t) =1
1− ϕd(t)2ed(t)2
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 6 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Final control design
Intuitive approach:
if ed(t) = −ϕd(t)−1,
then switch from uv toud and vice versa
while ud is active itshould be possible thatev (t) < −ϕv (t)
−1, butnot ev (t) ≥ ϕv (t)
−1
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 7 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Final control design
Intuitive approach:
if ed(t) = −ϕd(t)−1,
then switch from uv toud and vice versa
while ud is active itshould be possible thatev (t) < −ϕv (t)
−1, butnot ev (t) ≥ ϕv (t)
−1
Problem:
when ed(t)→ −ϕd(t)−1 we have kd(t)↗∞
when ev (t)→ −ϕv (t)−1 we have kv (t)↗∞
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 7 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Final control design
Intuitive approach:
if ed(t) = −ϕd(t)−1,
then switch from uv toud and vice versa
while ud is active itshould be possible thatev (t) < −ϕv (t)
−1, butnot ev (t) ≥ ϕv (t)
−1
u = uv
ev = 0
v
u=min{u
d , uv }
ϕ−1v
ed = 0
u = ud
ϕ−1d
x
Problem:
when ed(t)→ −ϕd(t)−1 we have kd(t)↗∞
when ev (t)→ −ϕv (t)−1 we have kv (t)↗∞
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 7 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
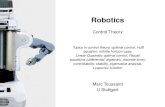
Final control design
u(t) =
uv (t), ed(t) ≤ −ϕd(t)
−1 ∧ ev (t) ∈ Fv (t),
ud(t), ev (t) ≤ −ϕv (t)−1 ∧ ed(t) ∈ Fd(t),
min{uv (t), ud(t)}, ev (t) ∈ Fv (t) ∧ ed(t) ∈ Fd(t),
u = uv
ev = 0
v
u=min{u
d , uv }
ϕ−1v
ed = 0
u = ud
ϕ−1d
x
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 8 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
Final control design
u(t) =
uv (t), ed(t) ≤ −ϕd(t)
−1 ∧ ev (t) ∈ Fv (t),
ud(t), ev (t) ≤ −ϕv (t)−1 ∧ ed(t) ∈ Fd(t),
min{uv (t), ud(t)}, ev (t) ∈ Fv (t) ∧ ed(t) ∈ Fd(t),
Theorem [B., Rauert ’18]
vref , xl ∈ W1,∞(R≥0 → R), xsafe = λ1v(t) + λ2=⇒ x , v , u ∈ L∞ and
ϕv (t)−1 − ev (t) ≥ ε, ϕd(t)
−1 − ed(t) ≥ ε,max{0, ϕv (t)
−1 + ev (t)}+max{0, ϕd(t)−1 + ed(t)} ≥ ε
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 9 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
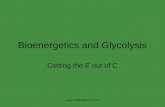
Simulationm θ(t) ρ(t) Cd Cr A
1300 kg 0 rad 1 .3 kg/m3 0.32 0.01 2 .4 m2
x0 v0 λ1 λ2 vref0 m 15 m s−1 0 .5 s 2 m 36 m s−1
ϕv (t) =(22.5e−0.2t + 0.2
)−1, ϕd(t) = 0.25.
0 10 20 30 40 500
20
40
60
80
100
time t / s
x/
m
xl ! xxsafe + 2ϕ!1
dxsafe
0 10 20 30 40 5010
20
30
40
50
60
time t / s
v/m/s
vlvvref ' ϕ!1
v
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 10 / 11

fakultät
für mathematik, informatik
und naturwissenschaften
0 10 20 30 40 500
5
10
15
20
25
time t / s
x/m
xl ! x
xsafe + 2ϕ!1d
xsafe
0 10 20 30 40 50-20
0
20
40
60
time t / s
v/m/s
vlv
vref ' ϕ!1v
0 10 20 30 40 500
10
20
30
40
50
60
time t / s
x/m
xl ! x
xsafe + 2ϕ!1d
xsafe
0 10 20 30 40 5010
20
30
40
50
60
time t / s
v/m/s
vlvvref ' ϕ!1
v
Vienna, 3 July, 2018 — Thomas Berger, Anna-Lena Rauert - Funnel cruise control 11 / 11