Flight Dynamics and Control - Ltas-aea ::Welcome€¦ · · 2018-04-09Flight Dynamics and Control...
75
Flight Dynamics and Control Lecture 4: Lateral stability Derivatives G. Dimitriadis University of Liege 1
Transcript of Flight Dynamics and Control - Ltas-aea ::Welcome€¦ · · 2018-04-09Flight Dynamics and Control...

Flight Dynamics and ControlLecture 4:
Lateral stability DerivativesG. Dimitriadis
University of Liege1

Previously on AERO0003-1• We developed linearized equations of
motion
m − X w 0 0
0 m − Z w( ) 0 0
0 − M w Iy 00 0 0 1
"
#
$$$$$
%
&
'''''
uwqθ
"
#
$$$$
%
&
''''
+
− Xu − Xw − Xq − mWe( ) mgcosθe− Zu − Zw − Zq + mUe( ) mgsinθe− Mu − Mw − Mq 00 0 −1 0
"
#
$$$$$
%
&
'''''
uwqθ
"
#
$$$$
%
&
''''
=
XηXτ
Zη ZτMη
Mτ
0 0
"
#
$$$$
%
&
''''
η
τ"
#$%
&'
m 0 0 0 00 Ix −Ixz 0 00 −Ixz Iz 0 00 0 0 1 00 0 0 0 1
"
#
$$$$$$
%
&
''''''
vprϕψ
"
#
$$$$$$
%
&
''''''
+
− Yv − Yp + mWe( ) − Yr − mUe( ) −mgcosθe −mgsinθe− Lv − Lp − Lr 0 0− Nv − Np − Nr 0 00 −1 0 0 00 0 −1 0 0
"
#
$$$$$$
%
&
''''''
vprϕ
ψ
"
#
$$$$$$
%
&
''''''
=
Yξ YςLξ LςNξ
Nς
0 00 0
"
#
$$$$$$
%
&
''''''
ξ
ς"
#$%
&'
Longitudinal direction
Lateral direction

Lateral stability derivatives• We have already derived expressions for the most important
longitudinal stability derivatives.• Here we will do the same thing for the lateral stability
derivatives.• This means the derivatives of the sideforce Y, rolling
moment L and yawing moment N with respect to perturbations v, p, r, x, z.
• The discussion is based on – Etkin and Reid, Dynamics of flight.– Roskam, Methods for estimating stability and control
derivatives of conventional subsonic airplanes.• Both of these works include results from:
– Hoak et al, USAF Stability and Control Datcom (Data compendium)
3

Sideslip angle• The angle of
sideslip is a lateral angle of attack.
• It should not be confused with the yaw angle.
cg
V0
y
x
V
U
b
β = sin−1 VV0
4

Equilibrium flight condition• Consider rectilinear flight at a constant sideslip
angle be:
• The perturbed sideslip angle is given by:
• Take the difference form:
• This means that derivatives with respect to b are in fact derivatives with respect to v.
V =Ve + v, βe = sin−1 VeV0
β = sin−1Ve + vV0
≈ sin−1 VeV0+vV0
= βe +vV0
dβ = d βe +vV0
!
"#
$
%&=
1V0dv
5

Sideforce• The wing, fuselage, propeller and fin all
contribute to the sideforce Y.• Wing sideforce contribution:
– Sidewash factor– Wing sideforce
• Fuselage sideforce contribution:– Sidewash factor– Fuselage lift
• Propeller sideforce contribution:– Sidewash factor– Propeller normal force
• Fin sideforce contribution:– Fin lift 6

Rolling moment• The wing, fin and fuselage contribute to the
rolling moment.• Wing rolling moment contribution:
– Wingtip vortex effect– Dihedral effect– Sweep effect
• Fuselage rolling moment contribution:– High wing or low wing
• Fin rolling moment contribution:– Fin lift
7

Yawing moment• The wing, fin and fuselage contribute to the yawing moment.• Wing yawing moment contribution:
– Sidewash factor– Angle of attack difference on two half-wings due to rolling:
• Asymmetric induced drag– Angle of attack difference on two half-wings due to yawing:
• Asymmetric lift and drag, particularly when the wing is swept• Fuselage yawing moment contribution:
– Sidewash factor– Fuselage lift
• Fin yawing moment contribution:– Fin lift
• Propeller yawing moment contribution:– Propeller normal force
8

Fin lift• A fin is an upright wing.
Depending on the geometry, it can be a half-wing.
• In general, the fin will have a symmetric airfoil and its geometric angle of attack will be zero.
• The fin lift is then
• Where c1 is the fin’s lift curve slope, c2 is the rudder curve slope, aF is the fin angle of attack and z is the rudder deflection angle.
CLF = c1αF + c2ζ
9

Lift curve slope• The lift curve slope for a wing is given by:
– Straight tapered wings:
– Swept wings:
• For half-wing fins, we can divide aF by two but the aspect ratio must be for a full wing.
CLα= 0.995
clαE + clα /πAR
, where E =1+ 2λAR 1+λ( )
βCLα=
2π
2βAR
+1
k2 cos2 Λβ
+2
βAR"
#$
%
&'
2
where tanΛβ =tanΛ1/2
β and k =
βclα2π
β = 1− M 2
10

Fin angle of attack
• The angle of attack of the fin depends on:– Sideslip angle b– Sidewash angle s– Roll velocity p– Yaw velocity r
• The last two motions introduce effective curvature and camber to the fin but these effects can be modelled as angle of attack modifications.
11

Sidewash angle• The wing and fuselage
deflect the flow seen by the tail.
• The deflection angle is known as the sidewashangle s.
• The angle of attack of the fin is:
• We assume that the sidewash is a linear function of sideslip, so that:
cg
V0
y
x
V
U
b
b
sb-s
LF
αF = −β +∂σ∂β
β = − 1− ∂σ∂β
#
$%
&
'(β
αF = −β +σ
12

Sidewash derivative approximation
• The sidewash derivative with respect to b can be approximated as:
• where Zw is the vertical distance from the wing root quarter-chord to the fuselage centreline, positive downward, and
• SF is the fin area, S is the wing area, A the aspect ratio and Lc/4 the sweep angle at the quarter-chord.
∂σ∂β
= −0.276+3.06 SFS
11+ cosΛc/4
+ 0.4 Zw
d+ 0.009A
d = average fuselage cross sectional area0.7854
13

Angle due to roll velocity• The roll velocity introduces a
linearly varying velocity distribution on the fin, pz.
• A mean value for this velocity distribution is pzF, where zF is an appropriate mean height of the fin.
• We can simplify by saying that zF is the height of the fin’s aerodynamic centre.
• Note that the roll motion also has an effect on the sidewash angle.
• Then the change in angle of attack due to the roll motion is
Δα p = −pzFV0
+∂σ∂p
p 14

Angle due to yaw velocity• The yaw velocity r
introduces an additional airspeed rlF perpendicular to the fin.
• Yawing also has an effect on the sidewash angle.
• Then, the angle of attack change due the yaw velocity is:
Δαr =rlFV0
+∂σ∂r
r 15

Sideforce due to fin lift• The total sideforce due to fin lift is then given
by:
• Substituting b=be+v/V0:
• Separating the stiffness from the damping terms we get:
Ya =12ρV0
2SFc1 − 1−∂σ∂β
#
$%
&
'(βe − 1−
∂σ∂β
#
$%
&
'(vV0−pzFV0
+∂σ∂p
p+ rlFV0
+∂σ∂r
r#
$%
&
'(+12ρV0
2SFc2ζ
Ya =Yae +12ρV0
2SFc1∂σ∂p
p+ ∂σ∂r
r"
#$
%
&'+12ρV0SFc1 − 1−
∂σ∂β
"
#$
%
&'v+ rlF − pzF
"
#$
%
&'+12ρV0
2SFc2ζ
Ya =12ρV0
2SFc1 − 1−∂σ∂β
#
$%
&
'(β −
pzFV0
+∂σ∂p
p+ rlFV0
+∂σ∂r
r#
$%
&
'(+12ρV0
2SFc2ζ

Y aerodynamic derivatives due to fin
• The aerodynamic derivatives of Ybecome:!Yv = −
12ρV0SFc1 1−
∂σ∂β
#
$%
&
'(
!Yp =12ρV0
2SFc1∂σ∂p
−12ρV0SFc1zF
!Yr =12ρV0
2SFc1∂σ∂r
+12ρV0SFc1lF
!Yζ =12ρV0
2SFc2
Yv = −SFSc1 1−
∂σ∂β
#
$%
&
'(
Yp =SFSc1 V0
∂σ∂p
− zF#
$%
&
'(
Yr =SFSc1 V0
∂σ∂r
+ lF"
#$
%
&'
Yζ =SFSc2
17

DATCOM values for sideforcederivatives due to fin
• The terms !"/!$ and !"/!% are difficult to calculate.• The DATCOM proposes the following value for the sideforce
derivative due to roll:
&' = 2&*+, cos 0 − 2, sin 0
5 = −26,6 78 1 − !"!:+, cos 0; − 2, sin 0;
5• where 0; is the equilibrium angle of attack.• Similarly, for the sideforce derivative due to yaw, the DATCOM
proposes
&< = −2&*+, sin 0 + 2, cos 0
5 = 2 6,6 78 1 − !"!:+, cos 0; − 2, sin 0;
5• Note that both of these derivatives are only the contributions
from the fin. Contributions from the body and wing will be given later.
• Furthermore, these contributions are generally small.

Rolling moment diagram
• The fin generates a rolling moment around the centre of gravity.
• The rolling moment is equal to the fin lift times the distance between the fin’s aerodynamic centre and the centre of gravity.
19

Rolling moment due to fin
• The rolling moment due to the fin is given simply by:
• Substituting for the fin angle of attack:
• Substituting b=be+v/V0:
La =12ρV0
2SF c1 − 1−∂σ∂β
#
$%
&
'(β −
pzFV0
+∂σ∂p
p+ rlFV0
+∂σ∂r
r#
$%
&
'(+ c2ζ
#
$%%
&
'((zF
La = Lae +12ρV0
2SFzFc1∂σ∂p
p+ ∂σ∂r
r"
#$
%
&'+12ρV0SFzFc1 − 1−
∂σ∂β
"
#$
%
&'v− pzF + rlF
"
#$
%
&'+12ρV0
2SFzFc2ζ
La =12ρV0
2SFCLFzF =12ρV0
2SF c1αF + c2ζ( ) zF

L aerodynamic derivatives due to fin
• The aerodynamic derivatives of Lbecome (recalling that ): !Lv = −
12ρV0SFzFc1 1−
∂σ∂β
#
$%
&
'(
!Lp =12ρV0
2SFzFc1∂σ∂p
−12ρV0SFc1zF
2
!Lζ =12ρV0
2SFzFc2
Lv = −VFzFlFc1 1−
∂σ∂β
#
$%
&
'(
Lp =VFc1zFlF
V0∂σ∂p
− zF#
$%
&
'(
Lζ =VFzFlFc2
VF =SFlFSb
!Lr =12ρV0
2SFzFc1∂σ∂r
+12ρV0SFzFc1lF Lr =VF
zFlFc1 V0
∂σ∂r
+ lF"
#$
%
&'
21

DATCOM values for rolling moment derivatives due to fin
• Again, the terms !"/!$ and !"/!% are difficult to calculate.• The DATCOM proposes the following value for the rolling
moment due to roll:
&' = 2*+,-./ = −21-1 23 1 − !"!5
,-./
• Similarly, for the rolling moment derivative due to yaw, the DATCOM proposes
&6 = 2 1-1 23 1 − !"!5,- sin : + <- cos : ,- cos :? − <- sin :?
/.• Note that both of these derivatives are only the contributions
from the fin. Contributions from the body and wing will be given later.
• Furthermore, these contributions are generally small.

Yawing moment diagram
cg
V0
y
x
V
U
b
b
sb-s
LF
NlF
• The fin lift causes a restoring yawing moment around the aircraft’s CG.
• Assuming that the sideslip angle is small, the moment is given by:
Na = LFlF23

Yawing moment due to fin
• The yawing moment due to the fin is given simply by:
• Substituting for the fin angle of attack:
• Substituting b=be+v/V0:
Na = −12ρV0
2SFCLFlF = −12ρV0
2SF c1αF + c2ζ( )lF
Na = −12ρV0
2SF c1 − 1−∂σ∂β
#
$%
&
'(β −
pzFV0
+∂σ∂p
p+ rlFV0
+∂σ∂r
r#
$%
&
'(+ c2ζ
#
$%%
&
'((lF
Na = Nae−12ρV0
2SFlFc1∂σ∂p
p+ ∂σ∂r
r#
$%
&
'(+12ρV0SFlFc1 1− ∂σ
∂β
#
$%
&
'(v+ pzF − rlF
#
$%
&
'(−12ρV0
2SFlFc2ζ

N aerodynamic derivatives due to fin
• The aerodynamic derivatives of Nbecome (recalling that ): !Nv =
12ρV0SFlFc1 1−
∂σ∂β
#
$%
&
'(
!Np = −12ρV0
2SFlFc1∂σ∂p
+12ρV0SFlFc1zF
!Nr = −12ρV0
2SFlFc1∂σ∂r
−12ρV0SFlF
2c1
!Nζ = −12ρV0
2SFlFc2
Nv =SFlFSb
c1 1−∂σ∂β
#
$%
&
'(=VFc1 1−
∂σ∂β
#
$%
&
'(
Np =VFc1 zF −V0∂σ∂p
#
$%
&
'(
Nr = −VFc1 V0∂σ∂r
+ lF#
$%
&
'(
Nζ = −VFc2ζ
VF =SFlFSb
25

DATCOM values for yawing moment derivatives due to fin
• Again, the terms !"/!$ and !"/!% are difficult to calculate.• The DATCOM proposes the following value for the yawing
moment due to roll:&' = )*
• Similarly, for the yawing moment derivative due to yaw, the DATCOM proposes
&* = −2-.- /0 1 − !"!23. sin 7 + 9. cos 7 <
=<• Note that both of these derivatives are only the contributions
from the fin. Contributions from the body and wing will be given later.
• Furthermore, these contributions are generally small.

Static stability in yaw
• Static stability in yaw is also known as weathercock or yaw stiffness.
• At static conditions, p=r=0 and b is a constant.
• The yawing moment N becomes:
• Non-dimensionalise with respect to 12 ρV02Sb
Na = −12ρV0
2SFlF −c1 1−∂σ∂β
#
$%
&
'(β + c2δ
#
$%
&
'(
CN = −SFlFSb
−c1 1−∂σ∂β
#
$%
&
'(β + c2δ
#
$%
&
'(= −VF −c1 1−
∂σ∂β
#
$%
&
'(β + c2δ
#
$%
&
'( 27

Static stability in yaw (2)• The aircraft is stable in yaw if
• where
• If the rudder is held fixed, we obtain the controls fixed yaw stability criterion:
• Recall that this is only the fin contribution to stability in yaw. The wing, body and propeller contributions must also be included in order to properly asses the stability of the aircraft.
∂CN
∂β< 0
∂CN
∂β=VF c1 1−
∂σ∂β
#
$%
&
'(− c2
∂δ∂β
#
$%
&
'(
∂CN
∂β=VFc1 1−
∂σ∂β
#
$%
&
'(< 0
28

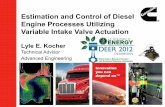
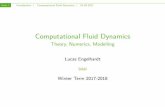
Effect of sideslip on wing• Straight rectangular wing with AR=8 at a=5o and b=10o.
• The left wingtip vortex moves away from the wing.
• The right wingtip vortex moves towards the wing.
• Sideslip has a significant effect on downwash and therefore induced drag.
• The effect on the lift is small.• The sideforce is small.
x(m
)
10
15
20
25
30
35
0
5
10
y (m)
5
Wake after 1.9 s
0-5-1029

y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
406080100120140160
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
0
1
2
3
4
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
0
50
100
150
200
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
0
1
2
3
4
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
-50
0
50
100
150
200
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
0
1
2
3
4y (m)
-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)-100-50050100150200
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
0
1
2
3
4
Increasing angle b
b=0o b=5o
b=10o b=15o
30

Discussion of effect of b on wings
• For planar wings, the main effect of sideslip is an asymmetry in drag. – The trailing wing has high drag and the leading wing
has low drag.– This asymmetry causes a destabilising yawing
moment.• There is a small amount of asymmetry in lift very
near the wingtips but it can be neglected.• The sideforce is also very low and can be
neglected.• The main lateral load contribution of a planar wing
in sideslip is then the yawing moment N. Even this moment can be small and neglected if there is no dihedral. 31

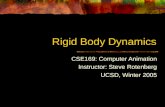
Sideslip and dihedral• Adding dihedral changes completely the
situation:– Same wing as before at b=10o but with 10o
dihedral.
35
30
25
20
x (m)
15
10
Wake after 1.9 s
5
0-10
-5
0
y (m)
5
10
420-2-4
z(m
)
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
-50
0
50
100
150
200
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
-4
-2
0
2
4
6

Dihedral effect• In the presence of dihedral, the yawing moment
caused by sideslip changes direction:– The trailing wing now has low drag and the
leading wing high drag. – The yawing moment is stabilizing.
• On the other hand, the lift is now completely asymmetric.– The leading wing has high lift and the trailing wing
low lift.– A rolling moment is created.
• Anhedral has exactly the opposite effect:– The yawing moment is destabilising.– The rolling moment is of opposite direction.
33

Sideslip and sweep
• Sweep also has an effect:– Same wing as before at b=10o but with 30o
sweep, no dihedral.
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
100105110115120125130135
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
-1012345
3530
2520
x (m)
15
Wake after 1.9 s
105
0-10
-5
0
y (m)
5
10
4
2
0
-2
-4
z(m
)
34

Sweep effect• Sweep does not affect the direction of the
yawing moment:– The trailing wing has high drag and the leading
wing low drag. – The yawing moment is destabilizing but weak.
• It does however create a rolling moment, albeit weaker than that created by dihedral.– The leading wing has high lift and the trailing wing
low lift.– A rolling moment is created.
• Forward swept wings do not produce a significant rolling moment.
35

Roll angle• Aircraft at a roll angle
are usually subjected to a restoring moment.
• The lift is inclined so the aircraft will start sideslipping.
• If the wing has dihedral, the sideslip will cause a stabilising rolling moment.
• The low wing is also the leading wing and it has high lift.
• This phenomenon is known as roll stiffness.
36

Roll angle and dihedral• Dihedral has an effect when the wing is
rolled, even if the sideslip angle is 0o:– Same wing as before at b=0o but with 15o
dihedral at a 10o roll angle.
x (m)
30
20
10
0-10-5
Wake after 1.9 s
0y (m)510
-4
-3
-2
-1
0
1
2
3
4
z(m
)
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
100110120130140150160170
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
0
1
2
3
4
37

Dihedral effect on roll• Dihedral causes mainly a lift asymmetry
when the wing is rolled:– The high wing has low lift and the low wing
high lift. – The result is a restoring rolling moment.
• It also creates a yawing moment.– The high wing has low drag and the low wing
high drag.• The effect of dihedral is increased when
the aircraft starts sideslipping.• Anhedral has exactly the opposite effect.
38

Effect of fuselage on roll moment
• The position of the wing on the fuselage has a significant effect on roll stability.– High wing: stabilising moment– Low wing: destabilising moment.
• This effect is due to the fact that the fuselage diverts the flow around the wing.
alowahigh
ahighalow
39

Roll Control
• Roll control can be accomplished using the ailerons
δ1
δ2
The total aileron angle is given by δa=(δ1+δ2)/2
More lift, more drag
Less lift, less drag Adverse yaw
40

Aileron adverse yaw
• Increasing the lift also increases the drag and vice versa.
• When deflecting ailerons, there is a net yawing moment in an opposite direction to the rolling moment.– When rolling left (in order to turn left), there
is a yawing moment to the right– This can make turning very difficult,
especially for high aspect ratio wings41

Roll control by spoilers
• Another way of performing roll control is by deforming a spoiler on the wing towards which we want to turn. To turn left:
The spoiler decreases lift and increases drag. Now the yawing moment is in the same direction as the roll.
Proverse yaw

Frise Ailerons
Frise ailerons are especially designed to create very high profile drag when deflected upwards. When deflected downwards the profile drag is kept low. Thus, they alleviate or, even, eliminate adverse yaw
The idea is to counteract the higher lift induced drag of the down wing with higher profile drag on the up wing.
43

Differential Aileron Deflection
• The roll rate of the aircraft depends on the mean aileron deflection angle. The individual deflections δ1 and δ2 do not have to be equal.Differential deflection means that the up aileron is deflected by a lot while the down aileron is deflected by a little. 44

Effect of roll rate
• Roll rate creates significant moments:– Same wing as before at a=0o with 18o/s roll
rate (three times faster than a watch).
-10-5
y (m)
05
Wake after 3.9 s
100
10
20
30x (m)
40
50
60
70
-2
-4
0
2
4
80
z(m
)
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionallift
(N/m
)
-20020406080100
y (m)-4 -3 -2 -1 0 1 2 3 4
Sec
tionalin
duce
ddra
g(N
/m
)
-0.50
0.51
1.52
2.5

Roll rate effect
• The plunging wing has high lift while the climbing wing has low lift:– A significant rolling moment is generated,
known as roll damping• The plunging wing also has high drag
while the climbing wing has low drag:– A significant yawing moment is generated
46

Roll subsidence• The pilot deflects the ailerons in order to start
rolling:– The climbing wing has high lift, the plunging wing low
lift.• As the aircraft accelerates in roll, the lift of the
climbing wing decreases and that of the plunging wing increases.
• This means that the roll rate cannot accelerate to very high values:– As the roll rate increases, the rolling moment
decreases and eventually falls to zero.• This phenomenon is know as roll subsidence.
47

Wing and body contribution to Yv
• The wing contribution to Yv (non-dimensional) is given by:
• where G the wing dihedral.• The body contribution to Yv (non-dimensional) is given by:
• Where S0 is the cross-sectional area of the fuselage at the point x0 along the body.
• The values for S0 and Ki are obtained from the following figures.
Yv = −0.0001 Γ180π
per rad
Yv = −2KiS0S
per rad
48

x1 is the body station where first reaches its maximum negative value. Sx is the fuselage cross-sectional area as a function of x.
dSxdx
49

Wing contribution to Lv• The wing contribution to Lv (non-dimensional) is
given by:
CL is the wing lift coefficient, G the wing dihedral, A is the aspect ratio, q is the wing twist (negative for washout) and Lc/2, Lc/4 the sweep angle at the half-chord or quarter-chord.
• All the other factors are given by the following figures (l is the taper ratio).
Lv =180π
CL
Clβ
CL
!
"#
$
%&Λc/2
KMΛ+Clβ
CL
!
"#
$
%&A
(
)**
+
,--+Γ
Clβ
Γ
!
"#
$
%&KMΓ
+θ tanΛc/4
ΔClβ
θ tanΛc/4
!
"#
$
%&
012
32
452
62
50



Body contribution to Lv• The body contribution to Lv (non-
dimensional) is given by:
• where Zw is the vertical distance from the wing root quarter-chord to the fuselage centreline, b is the span and
Lv =180 Aπ
db−0.0005 d
b−2.4π180
Zw
b"#$
%&'
d = average fuselage cross sectional area0.7854
53

Wing and body contribution to Nv
• The wing contribution to Nv is neglected by the USAF DATCOM.
• The body contribution is given by
• Where S is the wing area, SBs is the fuselage side area and lB is the fuselage length.
• The factors KN and KRl are obtained from the following figures.
Nv = −180π
KNKRl
SBsSlBb
54

55

Wing and body contribution to Lp
• The wing and body contribution to Yp is considered negligible.
• The wing and body contribution to Lp (non-dimensional) is given by:
• where k is the ratio of the profile lift curve slope to 2p and M is the Mach number. Furthermore,
• The factor in brackets is given in the following figures.
Lp =1−M 2Clp
κ
"
#
$$
%
&
''
κ
1−M 2
Clp( )Γ
Clp( )Γ=0
Clp( )Γ
Clp( )Γ=0
=1− 2 Zw
b / 2sinΓ+3 Zw
b / 2#
$%
&
'(2
sin2 Γ
56

β = 1−M 2
57

Wing contribution to Np
• The body contribution to Np is negligible.• The wing contribution to Np (non-dimensional) is
given by:
• where a is the angle of attack, Lpw is the wing contribution to Lp. Furthermore,
Np = −Lpwtanα − −Lp tanα −
cnpCL
"
#$
%
&'CL=0,M
CL
"
#
$$
%
&
''+
Δcnpθ
"
#$
%
&'θ
cnpCL
!
"#
$
%&CL=0,M
=A+ 4cosΛc/4
AB+ 4cosΛc/4
AB+ 12AB+ cosΛc/4( ) tan2 Λc/4
A+ 12A+ cosΛc/4( ) tan2 Λc/4
cnpCL
!
"#
$
%&CL=0,M=0
cnpCL
!
"#
$
%&CL=0,M=0
= −16A+ 6 A+ cosΛc/4( )A+ 4cosΛc/4
h0 − h( ) tanΛc/4
A+tan2 Λc/4
12)
*+
,
-.
B = 1−M 2 cos2 Λc/4
58

Calculation of Δcnpθ
"
#$
%
&'
59

Wing contribution to Lr• The wing and body contributions to Yrare negligible.• The body contribution to Lr is negligible.• The wing contribution to Lr is given by
• whereLr =CL
clrCL
!
"#
$
%&CL=0,M
+ΔclrΓ
!
"#
$
%&Γ+
Δclrθ
!
"#
$
%&θ
ΔclrΓ
#
$%
&
'(=
112
πAsinΛc/4
A+ 4cosΛc/4
clrCL
#
$%
&
'(CL=0,M
=
1+A 1−B2( )
2B AB+ 2cosΛc/4( )+AB+ 2cosΛc/4
AB+ 4cosΛc/4
tan2 Λc/4
8
1+ A+ 2cosΛc/4
A+ 4cosΛc/4
tan2 Λc/4
8
clrCL
#
$%
&
'(CL=0,M=0


Wing contribution to Nr
• The body contribution to Nr is negligible.• The wing contribution to Nr is given by
• Where the values in brackets are given by the figures overleaf.
Nr =cnrCL2
!
"#
$
%&CL
2 +cnrCD0
!
"##
$
%&&CD0
62

xc= h0 − h 63

DATCOM Rudder derivatives• The factor !" for the rudder’s contribution
to the fin lift is difficult to calculate.• The DATCOM proposes the following
value for the sideforce rudder derivative:
#$ = !&'()*'()+
'()+,-,.
/0/
• where all the terms where already introduced in lecture 3 and concern the influence of the flaps. They can be calculated using the following figures.

Flap influence terms

DATCOM Rudder derivatives (2)
• DATCOM value for the rolling moment rudder derivative:
!" = $%&'()&'(*
+,(*-.-/ 010
21 345 &6781 59: &6/
• DATCOM value for the rolling moment rudder derivative:
;" = −$%&'()&'(*
+,(*-.-/ 010
21 59: &6=81 345 &6/

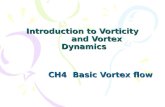
Propeller normal force• Propellers at an angle of
attack generate both thrust (along the axis) and a normal force (in the propeller’s plane)
• The normal force is given by:
• Where sp is the propeller disk area and
TNp
cg
b
V0
V
U
lpNp =
12ρV0
2spCNp
CNp= eβ 67

Propeller normal force curve slope
• The propeller normal force curve slope can be determined from: e = fC
Yψ 0'
Tc =T
ρV 2d 2
d is the propeller diameter
68

Propeller normal force curve slope (2)
Blade twist angle at 0.75R (in degrees)

Propeller normal force curve slope (3)
SFF = 525 b / d( )0.3 + b / d( )0.6!" #$+ 270 b / d( )0.9
70

• Procedure:– Determine Tc and then f.– Using the blade twist angle determine– Calculate Side Force Factor (SFF)– Determine the correct from SFF. – More info in
• Notes on the propeller and slipstream in relation to stability, H. S. Ribner, NACA Wartime Report L-25, 1944
Propeller normal force curve slope (4)
CYψ 0'
CYψ 0'
71

Discussion of propeller normal force
• The propeller normal force generates a yawing moment that is:– Destabilising if the propeller lies ahead of the CG
(puller propeller)– Stabilising if the propeller lies behind the CG
(pusher propeller)• From the f graph, the propeller normal force is
a nonlinear function of thrust, since e=e(T). • However, we can always linearize around a
trimmed thrust condition.
72

Handling the thrust• We can write the thrust as:
• where Te is the trimmed thrust and t is a small perturbation.
• The propeller normal force curve slope becomes:
• Note that we usually ignore propulsion derivatives (i.e. with respect to t) in the lateral equations.
T = Te +τ
e T( ) = e Te +τ( ) = e Te( )+ ∂e∂τ
τ
73

Propeller contributions to Y and N
• Contribution to Y:
• Substituting b=be+v/V0 and e(T):
• Contribution to N:
• Substituting b=be+v/V0 and e(T):
Ya = −Np = −12ρV0
2spe T( )β
Ya =Yae −12ρV0
2spβe∂e∂τ
τ −12ρV0spe Te( )v
Na = Nplp =12ρV0
2splpe T( )β
Na = Nae+12ρV0
2splpβe∂e∂τ
τ +12ρV0splpe Te( )v 74

Propeller aerodynamic derivatives
• The propeller contributions to the aerodynamic derivatives are:!Yv =
12ρV0spe Te( )
!Yτ = −12ρV0
2spβe∂e∂τ
!Nv =12ρV0splpe Te( )
!Nτ =12ρV0
2splpβe∂e∂τ
75
Yv =spSe Te( )
Nv =spSlpe Te( )
Yτ = !Yτ
Nτ =1b!Nτ =
12ρV0
2splpbβe∂e∂τ