Frequency Response Analysis: A Review - CERTHlpre.cperi.certh.gr/auth/files/AUTh_Frequency...
36
Prof. Costas Kiparissides Process Dynamics and Control Subject: Frequency Response Analysis Professor Costas Kiparissides Department of Chemical Engineering Aristotle University of Thessaloniki December 16, 2014 Prof. Costas Kiparissides Frequency Response Analysis: A Review 16-12-2014 1
Transcript of Frequency Response Analysis: A Review - CERTHlpre.cperi.certh.gr/auth/files/AUTh_Frequency...

Prof. Costas Kiparissides
Process Dynamics and Control
Subject: Frequency Response Analysis
Professor Costas Kiparissides
Department of Chemical Engineering
Aristotle University of Thessaloniki
December 16, 2014
Prof. Costas Kiparissides
Frequency Response Analysis:
A Review
16-12-2014
1

Prof. Costas Kiparissides
2 2
αωU(s)
s ω
p2 2
p2 2 2 2 2 2
Κ αωY(s)
(τs 1) (s ω )
K α τω ω τωs
s 1 / τ1 τ ω s ω s ω
(1)
(2)
Response of First-Order Systems
Let us assume a sine wave input function , U(t) = α sin(ωt), is introduced into a first order dynamic system. Its Laplace transform will be given by
Thus, for a first-order dynamic system, the Y(s) output deviation variable will be:
Prof. Costas Kiparissides
p t τ2 2
K αY ( t ) ( τω e s in ω t τω c o s ω t )
1 τ ω
(3)
ps 2 2
K αY ( t ) (s in ω t τω co s ω t )
1 τ ω
(4)
p cosω + q sinω = r sin(ω+φ) (5); r = (p2+q2)1/2 and φ = tan-1(p/q)
p 1s 2 2
K αY ( t ) s in (ω t φ ) ; φ ta n ( ω τ )
1 τ ω
(6)
Response to Sine Wave Function
The time response of the first-order dynamic system will be given by the inverse Laplace transform of Y(s), Eq. (2).
At steady-state
Using the following trigonometric properties:
Equation (4) is written:
16-12-2014
2

Prof. Costas Kiparissides
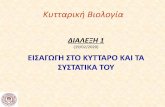
Time response of a first-order dynamic system to a sinusoidal input
tφ
Ys( t )
U ( t )
Μ ε τ α β α τ ι κ ή π ε ρ ίο δ ο ς
α '
α
t
U ( t )
Ys( t )
Transient Stage
tφ
Ys( t )
U ( t )
Μ ε τ α β α τ ι κ ή π ε ρ ίο δ ο ς
α '
α
t
U ( t )
Ys( t )
Transient Stage
Response to Sine Wave Function
Prof. Costas Kiparissides
% Frequency response of a first-order system % to a sinusoidal input
Kp = 17;
T = 2;
sys = tf([Kp],[T 1]);
a = 1;
w = 2;
t = [0 : 0.01 : 12*pi/w]';
u = a*sin(t*w);
[y,t] = lsim(sys,u,t);
figure(1)
plot(t,y,'k-',t,u,'k:')
grid on
xlabel(‘Time, sec')
ylabel('Y(t)')
title(['Time response of a first-order system '...
'to a sinusoidal input'])
pos = 0;
legend('Y(t)','U(t)',pos)
Response to Sine Wave Function
16-12-2014
3

Prof. Costas Kiparissides
p p
s iωs iω
Κ ΚG(iω ) G(s)
τs 1 τiω 1
(7)
2 2
pp
K (1 τiω ) 1 τiωG(iω ) K
(1 τiω )(1 τiω ) 1 τ ω
(8)
1/2
2 22 2
2 2 22 2
pp
K1 τ ωG(iω) ReG(iω) ImG(iω) K
1 τ ω1 τ ω
(9)
1 1Im G(iω )φ tan tan ( ωτ )
Re G(iω )
(10)
Frequency Response Analysis
Argument
Magnitude
Prof. Costas Kiparissides
2 2
2 2
p pK α 1 τ ω Kα(AR) G(iω)
α α 1 τ ω
Amplitude Ratio, (AR)
1 1φφ 2π(t T) tan (ωτ) tan ( ωτ)
Phase Shift, φ
Frequency Response Analysis
16-12-2014
4

Prof. Costas Kiparissides
2 2
p
A R 1lo g lo g (1 τ ω )
K 2
(11)
ω τ ω τp p
A R A Rlim lo g 0 ; lim lo g lo g ( τω )
K K
(12)
o o
ωτ ωτlim φ 0 ; lim φ 90
(13)
and φ = tan-1(-1) = -45o if ω = ωc (14)
Asymptotic analysis of (AR) and φ with respect to ωτ.
*
Frequency Response Analysis
0
0
Prof. Costas Kiparissides
Amplitude Ratio w.r.t. to ωτ
0.01 0.1 1 10 100
0.01
0.1
1
= ωcτ ωτ
Λ.Ε K
p
κλίση = -1slope = -1
AR
0.01 0.1 1 10 100
0.01
0.1
1
= ωcτ ωτ
Λ.Ε K
p
κλίση = -1slope = -1
AR
Bode Plot
�
16-12-2014
5

Prof. Costas Kiparissides
0.01 0.1 1 10 100-90
-45
0
o
o
o
ωτ
φ
Phase Shift w.r.t. to ωτ
Bode Plot
Prof. Costas Kiparissides
Kp = 17 ;
T = 2 ;
sys = tf([Kp],[T 1]) ;
w = logspace(log10(10^(-2)/T),log10(10^2/T)) ;
[mag,phase] = bode(sys,w) ;
AR = zeros(1,length(mag)) ;
for j = 1:1:length(mag)
AR(1,j) = mag(:,:,j) ;
end
figure(1)
loglog(w*T,AR/Kp,'k-')
ylim([0.01 10])
grid on
xlabel('\omega\tau')
ylabel(‘AR / K_p')
title(['Plotting Frequency Response'])
phi = zeros(1,length(phase)) ;
for i = 1:1:length(phase)
phi(1,i) = phase(:,:,i) ;
end
figure(2)
semilogx(w*T,phi,'k-')
grid on
xlabel('\omega\tau')
ylabel('\phi (^o)')
title(['Plotting Frequency Response'])
Bode Plots for a First-order System
16-12-2014
6

Prof. Costas Kiparissides
2 2 1 2pΚ (AR)(1 ω τ ) ; τ tan(φ ) ( ω )
Solution
Angular Frequencyω (rad/sec)
Amplitude RatioAR=|G(iω)|
Phase Shiftφ
5.00 0.1 ‐11.30o
4.80 0.2 ‐21.80o
3.80 0.4 ‐38.65o
2.60 0.8 ‐57.99o
2.30 1.0 ‐63.43o
1.25 2.0 ‐75.96o
0.63 4.0 ‐82.87o
0.40 6.0 ‐85.23o
Example: Parameter Estimation
Estimate the parameters (Kp and τ) of a first-order process, from the following frequency response data.
Prof. Costas Kiparissides
0 .1 1 1 00 .1
1
0 .5
(α )(Λ .Ε )
ω τ
(AR)(a)
0 .1 1 1 00 .1
1
0 .5
(α )(Λ .Ε )
ω τ
(AR)(a)
0.1 1 10-90
-45
0
(β )
o
o
o
ω
φ(b)
0.1 1 10-90
-45
0
(β )
o
o
o
ω
φ(b)
Example: Parameter Estimation
Amplitude Ratio w.r.t. to ωτ
Phase Shift w.r.t. to ωτ
T = 1/ωc =1/0.5 = 2 min
At ωτ →oA.R = Kp = 5
16-12-2014
7

Prof. Costas Kiparissides
Response to Sine Wave Function
Let us assume a sine wave input function , U(t) = α sin(ωt), is introduced into a second order dynamic system. The Y(s) response of the system will be given by
tφ
Ys( t )
U ( t )
Μ ε τ α β α τ ι κ ή π ε ρ ί ο δ ο ς
α '
α
t
U ( t )
Ys( t )
Transient Stage
tφ
Ys( t )
U ( t )
Μ ε τ α β α τ ι κ ή π ε ρ ί ο δ ο ς
α '
α
t
U ( t )
Ys( t )
Transient Stage
Response of a second order system to a sinusoidal input
Y sK
s s
A
s
p( )
2 2 2 22 1
Prof. Costas Kiparissides
Response to Sine Wave Function
16-12-2014
8

Prof. Costas Kiparissides
1/2
2 22 2
2 2 22 2
pp
K1 τ ωG(iω) ReG(iω) ImG(iω) K
1 τ ω1 τ ω
1 1Im G(iω )φ tan tan ( ωτ )
Re G(iω )
Frequency Response Analysis
Argument (Phase Shift)
Magnitude (Amplitude Ratio)
Where G(iω) = G(s)|s=iω is a complex transfer function
Prof. Costas Kiparissides
Steady-state Response to a Sine Wave
p p2 2 2 2s iω
s iω
K KG(iω) G(s)
τ s 2ζτs 1 1 τ ω 2ζτiω
(15)
G(iω) is a complex function. Its magnitude will be equal to the ratio of the output response amplitude over the respective valueof the input signal while its argument is equal to the phase shift.
or2 2
p 2 2 2 2
(1 τ ω ) i(2ζτω)G(iω) K
(1 τ ω ) (2ζτω)
(16)
This part describes the steady-state response of a second order system to a sinusoidal input function. It is obtained from the system’s transfer function by substituting the Laplace variable s in the TF with iω.
p
2 2 2 2
KG(iω )
(1 τ ω ) (2ζτω )
(17)
12 2
2τζωφ tan
1 τ ω
(18)
16-12-2014
9

Prof. Costas Kiparissides
Thus, for a sine wave input, the steady state response of the system is described by the following equation:
ps 2 2 2 2
K αΥ (t) G(iω) α sin(ωt φ) sin(ω t φ)
(1 τ ω ) (2τζω)
(19)
Remarks:
It is clear from Eq. (19) that a sinusoidal input (U(t)=αsinωτ) produces a sinusoidal output of the same frequency as the input.
Amplitude Ratio (AR):
The phase shift of the output lags behind that of the input by φ (Eq. 18).
p
2 2 2 2
K α '(AR) G(iω)
α (1 τ ω ) (2ζτω)
(20)
S.S Response to a Sine Wave
Prof. Costas Kiparissides
Asymptotic analysis of (AR) and φ with respect to ωτ.
2 2 2 2
p
AR 1log log (1 ω τ ) (2ζτω)
K 2
(21)
ωτ 0 ωτp p
AR ARlim log 0 ; lim log 2 log(ωτ )
K Κ
(22)
o
o
o
If τω 0 then tanφ 2ζωτ ; φ 0
If τω 1 then tanφ ; φ 90
2ζIf 1<τω then tanφ ; φ 180
ωτ
Frequency Response Analysis
16-12-2014
10

Prof. Costas Kiparissides
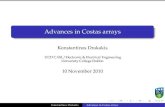
Figure: Frequency response plots for a second-order system. a) (AR/Kp) w.r.t. ωτ and b) φ w.r.t. ωτ
Bode Plots
0.1 1 10-180
-135
-90
-45
0
(β)
2,0
0,8
0,50,3
ζ = 0,1
o
o
o
o
o
ωτ
φ
0.1 1 100.01
0.1
1
10
(α)
2,0
0,8
0,5
0,3
ωτ
Λ.Ε.Κ
p
ζ = 0,1
p
AR
K
0.1 1 100.01
0.1
1
10
(α)
2,0
0,8
0,5
0,3
ωτ
Λ.Ε.Κ
p
ζ = 0,1
p
AR
K
(a)
(b)
Prof. Costas Kiparissides
The amplitude ratio plot exhibits a maximum for certain values of ζ. We can calculate this value by differentiating Eq. (20) with respect to ωτ and setting the result to zero:
Note: As ζ0, the
2 2 2 2 2 2 2 2
d 10
d(ωτ ) 1 (ω τ ) 2ω τ 4ζ ω τ
(23)
2max(ωτ) 1 2ζ ; ζ 0.707 (24)
2p m ax
AR 1
K 2ζ 1 ζ
(25)
p
A R
K
Frequency Response Analysis
16-12-2014
11

Prof. Costas Kiparissides
Ch
apte
r 4
Frequency Response Analysis
Prof. Costas Kiparissides
% Frequency Response of a Second-Order System to a Sinusoidal Input
Kp = 1; T = 1;
z = 0.2;
sys = tf([Kp],[T^2 2*z*T 1]);
a = 1;
w = 2;
t = [0 : 0.01 : 24*pi/w];
u = a*sin(t*w);
[y,t] = lsim(sys,u,t);
figure(1)
plot(t,y,'k-',t,u,'k:')
grid on
xlabel(['t/\tau'])
ylabel('Y(t)')
title(['Time response of a second-order system to a sinusoidal input'])pos = 0;
legend('Y(t)','U(t)',pos)
MATLAB: Response to Sine Wave
16-12-2014
12

Prof. Costas Kiparissides
% BODE Plots: Second-Order SystemKp = 17 ; T = 1 ; z = 0.2 ; sys = tf([Kp],[T^2 2*z*T 1]) ;w = logspace(log10(10^(-1)/T),log10(10^1/T),200) ;[mag,phase] = bode(sys,w) ; AR = zeros(1,length(mag)) ;for j = 1:1:length(mag)
AR(1,j) = mag(:,:,j) ; endfigure(1)loglog(w*T,AR/Kp,'k-')ylim([0.01 10])grid onxlabel('\omega\tau')ylabel('AR / K_p') title(['Amplitude ratio AR / K_p w.r.t. \omega\tau'])phi = zeros(1,length(phase)) ;for i = 1:1:length(phase)
phi(1,i) = phase(:,:,i) ; endfigure(2)semilogx(w*T,phi,'k-') grid onxlabel('\omega\tau') ylabel('\phi (^o)')'\upsilon \omega\tau']) title(['Phase Shift \phi w.r.t. \omega\tau'])
MATLAB: Response to Sine Wave
Prof. Costas Kiparissides
Response of “n” First-Order Systems
% Sinusoidal Response of “n” First-Order Systems in Series
Kd = 1 ;n = 5 ; % number of dynamic systems in seriesT = 1/n ;v1 = [T 1] ;v2 = [T 1] ;for i = 1:(n-1)
v2 = conv(v1,v2) ;endsys = tf([Kd^n],v2) ; w = logspace(log10(10^(-1)/T),log10(10^2/T),200) ;[mag,phase] = bode(sys,w) ; AR = zeros(1,length(mag));for j = 1:1:length(mag)
AR(1,j) = mag(:,:,j) ; endfigure(1)loglog(w*T,AR/(Kd^n),'k-')xlim([0.1 100]) ylim([0.01 1])grid onxlabel('\omega\tau')ylabel('AR / K_p') title(['Amplitude ratio, AR/K_p w.r.t. \omega\tau'])phi = zeros(1,length(phase));for i = 1:1:length(phase)
phi(1,i) = phase(:,:,i);endfigure(2) semilogx(w*T,phi,'k-') grid onxlabel('\omega\tau') ylabel('\phi (^o)') title(['Phase Shift, \phi w.r.t. \omega\tau'])
16-12-2014
13

Prof. Costas Kiparissides
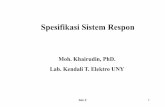
Figure : Frequency Response Plots for “n” Non-Interacting First-Order Systems in Series.a) (AR/Kp) w.r.t. ωτandb) φ w.r.t. ωτ
Bode Diagram
0.1 1 10 1000.01
0.1
1
n = 1 n = 2 n = 5
ωτ
Gd(iω)
Κd
n
0.1 1 10 100
-400
-300
-200
-100
0
n = 1 n = 2 n = 5
o
o
o
o
o
ωτ
φ
AR
0.1 1 10 1000.01
0.1
1
n = 1 n = 2 n = 5
ωτ
Gd(iω)
Κd
n
0.1 1 10 100
-400
-300
-200
-100
0
n = 1 n = 2 n = 5
o
o
o
o
o
ωτ
φ
AR
Prof. Costas Kiparissides
Frequency Response Analysis
and Control System Design
16-12-2014
14

Prof. Costas Kiparissides
Advantages:
1. Applicable to dynamic models of any order (including non-polynomials).
2. Designer can specify desired closed-loop response characteristics.
3. Information on stability and sensitivity/robustness is
provided.
Disadvantage:
The approach tends to be iterative and time-consuming
(interactive computer graphics desirable, MATLAB)
Cha
pter
13
Frequency Response Analysis
Prof. Costas Kiparissides
Some facts for complex number theory:
For a complex number:
It follows that where
such that
Frequency Response Analysis
w a bj a w b w Re( ), Im( )
a w b w cos( ), sin( )
w w w Re( ) Im( )2 2
arg( ) tanIm( )
Re( )w
w
w1
w we j
Re
Im
w
a
b
16-12-2014
15

Prof. Costas Kiparissides
Frequency Response Analysis
For a general transfer function
Frequency Response summarized by
where is the modulus of G(jω) and j is the
argument of G(jω)
Note: Substitute for s=jω in the transfer function.
G sr sq s
e s z s zs p s p
sm
n( )
( )( )
( ) ( )( ) ( )
1
1
G j G j e j( ) ( )
G j( )
Prof. Costas Kiparissides
The response of any linear process G(s) to a sinusoidal input is a sinusoidal.
The Amplitude Ratio of the resulting signal is given by the modulus of the transfer function model expressed in the frequency domain, G(jω).
The Phase Shift is given by the argument of the transfer function model in the frequency domain.
i.e.
Frequency Response Analysis
AR G j G j G j
G jG j
( ) Re( ( )) Im( ( ))
tanIm( ( ))Re( ( ))
2 2
1Phase Angle
16-12-2014
16

Prof. Costas Kiparissides
Frequency Response Analysis
n To study frequency response, we use two types of graphical representations.
1. The Bode Plot:
Plot of AR vs. ω on log-log scale
Plot of φ vs. ω on semi-log scale
2. The Nyquist Plot:
Plot of the trace of G(jω) in the complex plane
n Plots lead to effective stability criteria and frequency-based design methods
Prof. Costas Kiparissides
Frequency Response: Examples
1. Pure Capacitive Process G(s)=1/s
2. Dead Time G(s) = e-ϴs
G jKj
jj
Kj( )
ARK K
, tan/1
0 2
G j e j( )
AR 1,
16-12-2014
17

Prof. Costas Kiparissides
Bode Plots
10-2
10-1
100
100
101
102
AR
10-2
10-1
100
-91
-90.5
-90
-89.5
-89
Frequenc y (rad/s ec )
Pha
se A
ngle
Pure Capacitive Process
ARK
2
Prof. Costas Kiparissides
Cha
pter
13
Bode Plots for First-Order System
16-12-2014
18

Prof. Costas Kiparissides
Cha
pter
13
Bode Plots for Time-Delay System
Prof. Costas Kiparissides
Frequency Response of Complex Systems
3. n process in series
Frequency response of G(s)
Therefore,
G s G s G sn( ) ( ) ( ) 1
G j G j G j
G j e G j e
nj
nj n
( ) ( ) ( )
( ) ( )
1
11
AR G j G j
G j G j
ii
n
ii
ni
i
n
( ) ( )
arg( ( )) arg( ( ))
1
1 1
16-12-2014
19

Prof. Costas Kiparissides
4. n first order processes in series
5. First order plus delay
G sKs
Ksn
n( )
1
1 1 1
ARK Kn
n
n
1
12 2 2 2
11
1
1 1
tan tan
G sK e
sp
s
( )
1
ARKp
( ), tan ( )
1
1 2 21
Frequency Response of Complex Systems
Prof. Costas Kiparissides
Use a Bode plot to illustrate frequency response.
Plot of log |G| vs. log and vs. log
1 2 3
1 2 3
1 2 3
1 2 3
1
2
1 2
1 2
l o g l o g l o g l o g
l o g l o g l o g
G G G G
G G G G
G G G G
G G G G
GG
G
G G G
G G G
Cha
pter
13
Bode Plots for Complex T. Functions
16-12-2014
20

Prof. Costas Kiparissides
Bode Plots
1 0- 4
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
1 0- 4
1 0- 2
1 00
1 0- 4
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
- 3 0 0
- 2 0 0
- 1 0 0
0
G s G s G s G s( ) ( ) ( ) ( ) 1 2 3
G ss
G ss
G ss1 2 3
110 1
15 1
11
( ) , ( ) , ( )
G j( )( )( )( )
tan ( ) tan ( ) tan ( )
1
1 10 1 5 1 1
10 5
2 2 2 2 2 2
1 1 1
G1
G2
G3
GAR
Prof. Costas Kiparissides
Bode Plots
1 0- 4
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
1 0- 4
1 0- 2
1 00
1 0- 4
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
- 3 0 0
- 2 0 0
- 1 0 0
0
G=Gd
GGd
G s e s( )
G j( ) , 1
G s e G s G s G sds( ) ( ) ( ) ( ) 2
1 2 3
AR
16-12-2014
21

Prof. Costas Kiparissides
Cha
pter
13
Example
0.55(0.5 1)( )
(20 1)(4 1)
ss eG s
s s
Bode Plots
Prof. Costas Kiparissides
Recall that the frequency response is characterized by
1. Amplitude Ratio (AR)
2. Phase Angle ()
For any transfer function, G(s)
Proportional Controller
( )
( )
A R G j
G j
( ) , 0C C CG s K AR K
Cha
pter
13
Frequency Response of P Controller
16-12-2014
22

Prof. Costas Kiparissides
The Bode plot for a PI controller is shown in next slide.
Note b = 1/I . Asymptotic slope ( 0) is -1 on log-log plot.
PI Controller
2 2
1
1 1( ) 1 1
1tan
C C CI I
I
G s K AR Ks
Cha
pter
13
Frequency Response of PI
Prof. Costas Kiparissides
Frequency Response of PI
AR KcI
I
11
1
2 2
1
tan ( / )
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
1 00
1 01
1 02
1 03
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
-1 0 0
-8 0
-6 0
-4 0
-2 0
0
AR
16-12-2014
23

Prof. Costas Kiparissides
Series PID Controller. The simplest version of the series
PID controller is
Series PID Controller with a Derivative Filter.
τ 1τ 1 (14-50)
τI
c c DI
sG s K s
s
τ 1 τ 1(14-51)
τ ατ 1I D
c cI D
s sG s K
s s
Cha
pter
13
Ideal PID Controller.
1( ) (1 ) (14 48)c c D
I
G s K ss
Frequency Response of PID
Prof. Costas Kiparissides
Frequency Response of PID
AR Kc DI
DI
11
1
2
1tan
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
1 00
1 01
1 02
1 03
1 0- 3
1 0- 2
1 0- 1
1 00
1 01
-1 0 0
-5 0
0
5 0
1 0 0
AR
16-12-2014
24

Prof. Costas Kiparissides
Bode plots of ideal parallel PID controller and series PID controller with derivative filter (α = 1).
Ideal parallel:
Series with Derivative Filter:
10 1 4 12
10 0.4 1cs s
G ss s
12 1 4
10cG s ss
C
hapt
er 1
3Bode Plots of PID
Prof. Costas Kiparissides
Nyquist Plots
Plot of G(jω) in the complex plane as ω is varied
Relation to Bode plot
AR is distance of G(jω) for the origin
Phase angle, φ , is the angle from the real positive axis
Example: First order process (K=1, τ=1)
G j( )
16-12-2014
25

Prof. Costas Kiparissides
Nyquist Plots
Dead-time
Second Order
Prof. Costas Kiparissides
Nyquist Plots
Third Order
Effect of dead-time (second order process)
G ss s s
( )
1
3 3 13 2
G ss s
Gd s e s( ) , ( )
12 3 1
2
16-12-2014
26

Prof. Costas Kiparissides
Analyze GOL(s) = GCGVGPGM (open loop gain)
Three methods in use:
(1) Bode plot |G|, vs. (open loop F.R.) - Chapter 13
(2)Nyquist plot - polar plot of G(j)
(3)Nichols chart |G|, vs. G/(1+G) (closed loop F.R.)
Advantages:• Do not need to compute roots of characteristic equation• Can be applied to time delay systems• Can identify stability margin, i.e., how close you are to instability.
Cha
pter
13
Controller Design in Frequency Domain
Prof. Costas Kiparissides
Ch
apte
r 13
Sustained Oscillations in FB Control
16-12-2014
27

Prof. Costas Kiparissides
1. Bode Stability Criterion2. Nyquist Stability Criterion
Bode Stability Criterion:
A closed-loop system is unstable if the FR of the open-loop T.F
GOL=GCGPGVGM, has an amplitude ratio greater than one at the
critical frequency, . Otherwise, the closed-loop system is stable.
• Note: where the open-loop phase angle is –1800.
• The Bode Stability Criterion provides info on closed-loop stability from open-loop FR info.
C
value of C Cha
pter
13
Frequency Stability Criteria
Prof. Costas Kiparissides
Bode Stability Criterion
“A closed-loop system is unstable if the frequency of the response of the open-loop GOL has an amplitude ratio greater than one at the critical frequency. Otherwise it is stable. “
Strategy:
1. Solve for ω in
2. Calculate AR
arg( ( ))G jOL
AR G jOL ( )
16-12-2014
28

Prof. Costas Kiparissides
Bode Stability Criterion Check for stability:
1. Compute open-loop transfer function
2. Solve for ω in φ=- π
3. Evaluate AR at ω
4. If AR>1 then process is unstable
Find ultimate gain:
1. Compute open-loop transfer function without controller gain
2. Solve for ω in φ=- π
3. Evaluate AR at ω
4. Let KARcu 1
Prof. Costas Kiparissides
For proportional-only control, the ultimate gain Kcu is defined to be the largest value of Kc that results in a stable closed-loop system.
For proportional-only control, GOL= KcG and
G = GvGpGm.
AROL(ω)=Kc ARG(ω) (14-58)
where ARG denotes the amplitude ratio of G.
At the stability limit, ω = ωc, AROL(ωc) = 1 and Kc= Kcu.
1(14-59)
(ω )cuG c
KAR
Cha
pter
13
Frequency Stability Analysis
16-12-2014
29

Prof. Costas Kiparissides
Example 1: Bode Stability Criterion Consider the transfer function and controller
- Open-loop transfer function
- Amplitude ratio and phase shift
- At ω=1.4128, φ=-π, AR=6.746
G se
s s
s( )
( )( . )
.
51 05 1
01G s
sc ( ) ..
0 4 11
01
G se
s s sOL
s( )
( )( . ).
.
.
5
1 05 10 4 1
1
01
01
AR
5
1
1
1 0 250 4 1
1
0 01
01 051
01
2 2 2
1 1 1
..
.
. tan ( ) tan ( . ) tan.
Prof. Costas Kiparissides
A process has a transfer function,
And GV = 0.1, GM = 10 . If proportional control is used, determine
closed-loop stability for 3 values of Kc: 1, 4, and 20.
Solution:
The OLTF is GOL=GCGPGVGM or...
The Bode plots for the 3 values of Kc shown in Fig. 13.9.Note: the phase angle curves are identical. From the Bode diagram:
KC AROL Stable?1 0.25 Yes4 1.0 Conditionally stable20 5.0 No
3
2( )
(0.5 1)C
OL
KG s
s
3
2( )
(0.5 1)pG ss
Example 2: Bode Stability Analysis
16-12-2014
30

Prof. Costas Kiparissides
Bode plots for GOL = 2Kc/(0.5s + 1)3.
Cha
pter
13
Frequency Stability Analysis
Prof. Costas Kiparissides
Determine the closed-loop stability of the system,
Where GV = 2.0, GM = 0.25 and GC =KC . Find C from the Bode
Diagram. What is the maximum value of Kc for a stable system?
Solution:
The Bode plot for Kc= 1 is shown in Fig. 13.11.
Note that:
15
4)(
s
esG
s
p
OL
max
1.69 rad min
0.235
1 1= 4.25
0.235
C
C
COL
AR
KAR
Cha
pter
13
Example 3: Frequency Stability Analysis
16-12-2014
31

Prof. Costas Kiparissides
Cha
pter
13
Bode Plot for Kc = 1
Prof. Costas Kiparissides
Nyquist Stability Criterion
“If N is the number of times that the Nyquist plot encircles the point (-1,0) in the complex plane in the clockwise direction, and P is the number of open-loop poles of GOLthat lie in the right-half plane, then Z=N+P is the number of unstable roots of the closed-loop characteristic equation.”
Strategy
1. Substitute s=jω in GOL(s)
2. Plot GOL(jω) in the complex plane
3. Count encirclements of (-1,0) in the clockwise direction
16-12-2014
32

Prof. Costas Kiparissides
Nyquist Stability Criterion
Consider the transfer function
and the PI controller
G se
s s
s( )
( )( . )
.
51 05 1
01
G ssc ( ) .
.
0 4 11
01
Prof. Costas Kiparissides
Ultimate Gain: KCU = maximum value of |KC| that results in a stable closed-loop system when proportional-only control is used.
Ultimate Period:
KCU can be determined from the OLFR when proportional-only control is used with KC =1. Thus
Note: First and second-order systems (without time delays) do not have a KCU value if the PID controller action is correct.
2U
C
P
1for 1
C
CU COL
K KAR
Ultimate Gain and Ultimate Period
16-12-2014
33

Prof. Costas Kiparissides
• The gain margin (GM) and phase margin (PM) provide measures of how close a system is to a stability limit.
• Gain Margin:Let AC = AROL at = C. Then the gain margin is
defined as: GM = 1/AC
According to the Bode Stability Criterion, GM >1 stability
• Phase Margin:Let g = frequency at which AROL = 1.0 and the corresponding phase angle is g . The phase margin is defined as: PM = 180° + g
According to the Bode Stability Criterion, PM >0 stability
Cha
pter
13
Gain and Phase Margins
Prof. Costas Kiparissides
Cha
pter
13
Gain and Phase Margins
16-12-2014
34

Prof. Costas Kiparissides
Rules of Thumb:
A well-designed FB control system will have:
Closed-Loop FR Characteristics:
An analysis of CLFR provides useful information about control
system performance and robustness. Typical desired CLFR for
disturbance and setpoint changes and the corresponding step
response are shown in Appendix J (see Text).
1.7 2.0 30 45GM PM
Cha
pter
13
Design Gain and Phase Margins
Prof. Costas Kiparissides
Amplitude ratio plot.fig
10-2
10-1
100
10-2
10-1
100
Bode Plot : Amplitude Ratio
16-12-2014
35

Prof. Costas Kiparissides
10-2
10-1
100
-300
-250
-200
-150
-100
-50
0
Bode Plot : Phase Angle
Prof. Costas Kiparissides
Stability Considerations
n Control is about stability
n Considered exponential stability of controlled processes using: Roth criterion Direct Substitution Root Locus Bode Criterion (Restriction on phse angle) Nyquist Criterion
n Nyquist is most general but sometimes difficult to interpret
n Roots, Bode and Nyquist all in MATLAB
n MAPLE is recommended for some applications.
16-12-2014
36