
Flexão de Cascas Cilíndricas - fe.up.ptldinis/cap10cascas.pdf · Note-se que a teoria acabada de...
29
Flexão de Cascas Cilíndricas 3.1 Capítulo 10 Flexão de Cascas Cilíndricas 10.1 Equações Gerais de Cascas Cilíndricas Flectidas 10.1.1 Equações de Equilíbrio Considere-se num ponto de uma casca cilindrica cujo estado de tensão é definido a partir dos esforços generalizados, representados na figura 10.1 e que são: Esforços de membrana θ x s x N e N , N Esforços de flexão xs s x M e M , M Esforços de corte s x T e T onde x M e s M são momentos flectores por unidade comprimento, xs M é um momento torsor por unidade de comprimento e s x T e T são esforços cortantes por unidade de comprimento, sendo o eixo dos xx com a direcção do eixo de casca cilíndrica e θ = ad ds onde a representa o raio de curvatura de casca cilíndrica.
Transcript of Flexão de Cascas Cilíndricas - fe.up.ptldinis/cap10cascas.pdf · Note-se que a teoria acabada de...
Flexão de Cascas Cilíndricas 3.1
Capítulo 10
Flexão de Cascas Cilíndricas
10.1 Equações Gerais de Cascas Cilíndricas Flectidas
10.1.1 Equações de Equilíbrio
Considere-se num ponto de uma casca cilindrica cujo estado de tensão é definido
a partir dos esforços generalizados, representados na figura 10.1 e que são:
Esforços de membrana θxsx NeN,N
Esforços de flexão xssx MeM,M
Esforços de corte sx TeT
onde xM e sM são momentos flectores por unidade comprimento, xsM é um
momento torsor por unidade de comprimento e sx TeT são esforços cortantes por
unidade de comprimento, sendo o eixo dos xx com a direcção do eixo de casca
cilíndrica e θ= adds onde a representa o raio de curvatura de casca cilíndrica.
Flexão de Cascas Cilíndricas 3.2
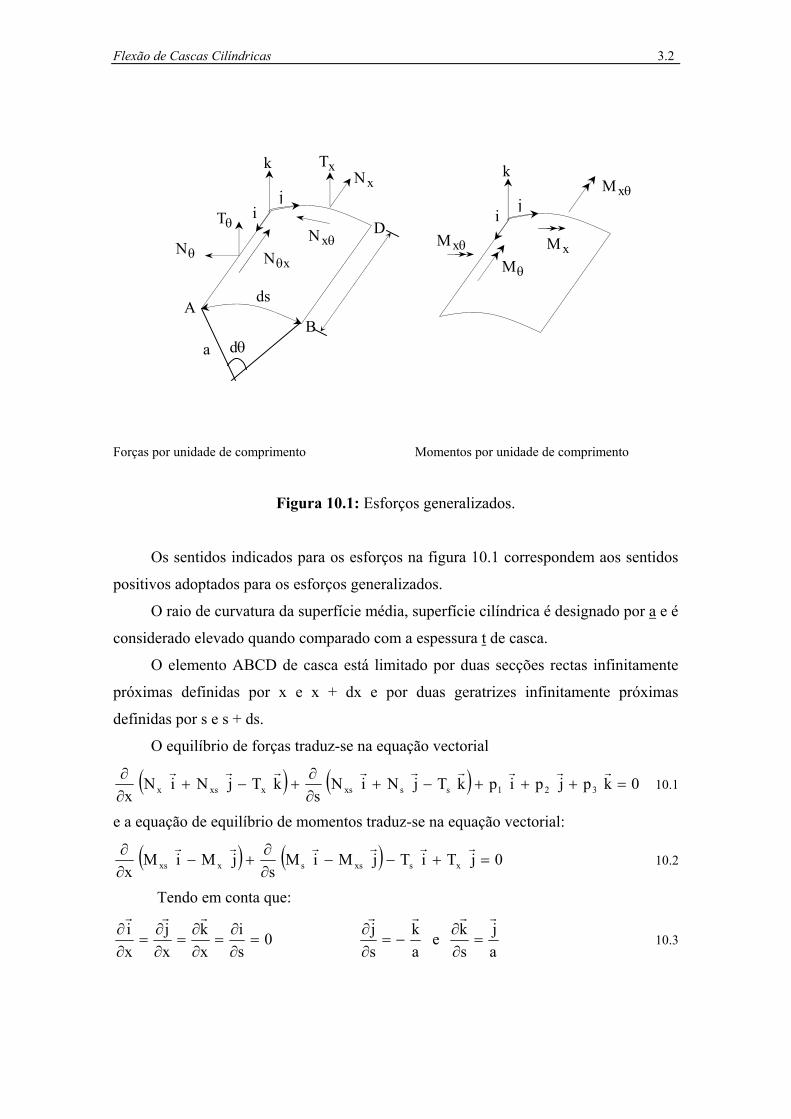
Forças por unidade de comprimento Momentos por unidade de comprimento
Figura 10.1: Esforços generalizados.
Os sentidos indicados para os esforços na figura 10.1 correspondem aos sentidos
positivos adoptados para os esforços generalizados.
O raio de curvatura da superfície média, superfície cilíndrica é designado por a e é
considerado elevado quando comparado com a espessura t de casca.
O elemento ABCD de casca está limitado por duas secções rectas infinitamente
próximas definidas por x e x + dx e por duas geratrizes infinitamente próximas
definidas por s e s + ds.
O equilíbrio de forças traduz-se na equação vectorial
( ) ( ) 0kpjpipkTjNiNs
kTjNiNx 321ssxsxxsx =+++−+
∂∂
+−+∂∂ 10.1
e a equação de equilíbrio de momentos traduz-se na equação vectorial:
( ) ( ) 0jTiTjMiMs
jMiMx xsxssxxs =+−−
∂∂
+−∂∂ 10.2
Tendo em conta que:
0si
xk
xj
xi
=∂∂
=∂∂
=∂∂
=∂∂
aj
ske
ak
sj
=∂∂
−=∂∂ 10.3
θT
θN
A B
D
xT
θMθxM
θxM
xM
k
ji
xNθ
xN
θxN
k
j i
ds
dθ a
Flexão de Cascas Cilíndricas 3.3
as equações vectoriais de equilíbrio são equivalentes às seis equações escalares
seguintes:
0ps
Nx
N1
xsx =+∂
∂+
∂∂
0pTa1
sN
xN
2xsxs =+−
∂∂
+∂
∂
0pNa1
sT
xT
3sx =−+
∂∂
+∂∂ 10.4
0Ts
Mx
Mx
xsx =−∂
∂+
∂∂
0Ts
Mx
Ms
sxs =−∂∂
+∂
∂
0Ma1
xs =
Pode obter-se uma boa aproximação considerando insignificantes os termos
a/Ts e a/Mxs , com efeito se a (raio de curvatura da superfície cilíndrica) é elevado e
os esforços sT e xsM são pequenos, nestas condições as equações 10.4 podem reduzir-
se a cinco equações de equilíbrio com a forma seguinte:
0ps
Nx
N1
xsx =+∂
∂+
∂∂
0ps
Nx
N2
sxs =+∂∂
+∂
∂
0pa
Ns
Tx
T3
ssx =−+∂∂
+∂∂ 10.5
0Ts
Mx
Mx
xsx =−∂
∂+
∂∂
0Ts
Mx
Ms
sxs =−∂∂
+∂
∂
Eliminando xT e sT nas últimas três equações das equações 10.5, obtém-se as
equações de derivadas parciais seguintes:

Flexão de Cascas Cilíndricas 3.4
0ps
Nx
N1
xsx =+∂
∂+
∂∂
0ps
Nx
N2
sxs =+∂∂
+∂
∂ 10.6
0pa
N
s
Msx
M2
x
M3
s2
s2
xs2
2x
2=−+
∂
∂+
∂∂∂
+∂
∂
Estas equações são insuficientes para calcular os esforços de flexão e de
membrana.
10.1.2 Relações Deformações-Deslocamentos
Considere-se o elemento ABCD na vizinhança do ponto e sobre a superfície
média da casca, como se representa na figura 10.2, sendo ( )θ,xA , ( )s,dxxB + ,
( )dss,xC + e ( )dss,dxxD ++ . Na configuração deformada os pontos ocupam a
posição A', B', C' e D' como se representa na figura 10.2. Designando por u, v, e w os
deslocamentos sofridos pelo ponto A é possível calcular os deslocamentos sofridos
pelos pontos B e C, ou seja:
O deslocamento do ponto A é
kwjviu'AA ++= 10.7
Figura 10.2: Configuração deformada do elemento ABCD.
B D
C
k
j i
dθ
A
B'
C'
D'
A'
jdaAC
idxAB
θ=
=

Flexão de Cascas Cilíndricas 3.5
O deslocamento do ponto B é:
kdxxwwjdx
xvvidx
xuu'BB
∂∂
++
∂∂
++
∂∂
+= 10.8
O deslocamento do ponto C é:
( ) ( ) dsskwkwds
sjvjvids
suu'CC
∂∂
++∂∂
++
∂∂
+= 10.9
Tendo em conta que
aj
ske
ak
dsjd
=∂∂
−= 10.10
obtém-se:
kdsav
swwjds
aw
svvids
suu'CC
−∂∂
++
+∂∂
++
∂∂
+= 10.11
Tendo em conta que idxAB = e jdsAC = obtém-se:
kdxxwjdx
xvidx
xu1'B'A
∂∂
+∂∂
+
∂∂
+=
kdsau
swjds
aw
sv1ids
su'C'A
−∂∂
+
+
∂∂
++∂∂
= 10.12
As componentes da deformação xε , sε e xsε do tensor da deformação na
ausência de mudanças de curvatura são:
xu
x ∂∂
=ε aw
sv+
∂∂
=θε e uv
su2 xs ∂
∂+
∂∂
=ε 10.13
Se se considerarem as coordenadas x e θ em lugar de x e s, as componentes da
deformação são:
xu
x ∂∂
=ε
+∂∂
= wva1
θεθ e
xvu
a12 x ∂
∂+
∂∂
=θ
ε θ 10.14

Flexão de Cascas Cilíndricas 3.6
Os termos de flexão são contabilizados de modo análogo ao considerado no caso
das placas.
10.1.3 Relações Deslocamento-Esforços Generalizados
Designado por e a espessura da casca, as relações entre os esforços e
deformações, lei de Hooke escrevem-se com a forma:
xu
x ∂∂
=ε ( )sx NNeE
1ν−=
aw
sv
s +∂∂
=ε ( )xs NNeE
1ν−=
xv
su2 xs ∂
∂+
∂∂
=ε ( )xsN
eE12 ν+
= 10.15
ou
+∂∂
+∂∂
=aw
sv
xukN x ν
∂∂
++∂∂
=xu
aw
svkNs ν
∂∂
+∂∂−
=xv
su
21kN xs
ν 10.16
onde k representa a rigidez de membrana que é definida por: 21eEkν−
= .
Fazendo uso das equações 10.15 podem calcular-se as deformações e uma vez
conhecidas as deformações podem calcular-se os deslocamento por integração.
As relações entre os momentos e os deslocamentos são análogos às consideradas
no caso das placas, as curvaturas são calculadas em função de deslocamento w, como já
foi referido e as relações momentos - curvaturas, são:
∂∂
+∂∂
= 2
2
2
2
x sw
xwDM ν
Flexão de Cascas Cilíndricas 3.7
∂∂
+∂∂
= 2
2
2
2
s xw
swDM ν
( )sx
w1DM2
xs ∂∂∂
−= ν 10.17
onde D representa o módulo de rigidez à flexão que é definido do seguinte modo:
( )2
3
112eEDν−
= .
As equações 10.16 e 10.17 conjuntamente com as equações 10.6, num total de
nove equações permitem o cálculo de ( )sxsx NeN,N , ( )sxsx MeM,M e
( )wev,u , sendo os esforços transversos calculados por uso das equações de equilíbrio
eliminadas para efeitos de obtenção das equações 10.6, as quais podem ser escritas em
termos dos deslocamentos, fazendo uso das equações 10.17 com a seguinte forma:
∂∂
+∂∂
∂∂
= 2
2
2
2
x sw
xw
xDT
∂∂
+∂∂
∂∂
= 2
2
2
2
s sw
xw
sDT 10.18
Note-se que a teoria acabada de obter tem uma aproximação que resulta de se
eliminarem os termos a/Mea/T xss , no caso de não se considerar esta aproximação,
há que distinguir entre xsN e sxN e entre xsM e sxM , sendo o estado de tensão
definido considerando seis equações de equilíbrio.
10.1.4 Equações de equilíbrio em termos dos deslocamentos
Substituindo as equações 10.16 e 10.17 nas equações 10.6, obtém-se as equações
de equilíbrio em termos dos deslocamentos que são:

Flexão de Cascas Cilíndricas 3.8
0kp
xw
asxv
21
su
21
xu 1
2
2
2
2
2=+
∂∂ν
+∂∂
∂ν++
∂
∂ν−+
∂
∂
0k
paw
ssxu
21
xv
21
sv 2
2
2
2
2
2=+
∂∂
+∂∂
∂ν++
∂
∂ν−+
∂
∂ 10.19
0pwDaw
sv
xu
ak
3 =−∇∇+
+
∂∂
+∂∂
ν
O operador ∇ representa 2
2
2
2
sx ∂∂
+∂∂ e consequentemente
4
4
22
4
4
42
sw
sxw2
xwww
∂∂
+∂∂
∂+
∂∂
=∇∇=∇
Por solução das equações 10.19 pode obter-se o campo de deslocamentos u, v e
w.
A solução geral das equações 10.19 pode escrever-se com a seguinte forma:
21 uuu += 21 vvv += 21 www +=
onde 1u , 1v e 1w representa uma solução geral do sistema homogéneo de equações
obtido do sistema 10.19 ( )0ppp 321 === e 2u , 2v e 2w representa uma solução
particular do sistema de equações 10.19 calculada de tal modo que u, v e w satisfaçam
as condições de fronteira.
As condições de fronteira mais frequentes que se encontram nas aplicações
práticas são:
1 - ao longo do bordo x = constante
♦ Bordo encastrado
u = 0, v = 0, w = 0 e 0xw
=∂∂
♦ Bordo simplesmente apoiado

Flexão de Cascas Cilíndricas 3.9
v = 0, w = 0, 0Mx = e 0Nx = 10.20
♦ Bordo livre
0Mx = , 0Nx = , 0Nxs = e 0s
MT xs
x =∂
∂+
2 - ao longo do bordo s = constante
♦ Bordo encastrado
u = 0, v = 0, w = 0 e 0sw
=∂∂
♦ Bordo simplesmente apoiado
u = 0, w = 0, 0Ms = e 0Ns = 10.21
♦ Bordo livre
0Ms = , 0Ns = , 0Nxs = e 0x
MT xs
s =∂
∂+
Note-se que no caso de ∞→a as equações 10.19, se reduzem às equações de
elasticidade plana e à equação de Lagrange.
10.2 Cascas Cilíndricas com Carregamento Axissimétrico
No caso do carregamento ser axissimétrico, o deslocamento v = 0 e as derivadas
em ordem a s são nulas, consequentemente as equações 10.19 tomam a forma:
0kp
dxdw
adxud 12
2
=++ν a)

Flexão de Cascas Cilíndricas 3.10
0kp
aw
dxwd
kD
dxdu
a3
24
4
=+++ν b) 10.22
Tendo em conta as relações esforços-deslocamentos, 10.16, conclui-se que
+=
aw
dxdukN x ν ou seja w
akN
dxdu x ν
−= 10.23
Substituindo este resultado na equação 10.22b obtém-se:
0kp
aw
dxwd
kDw
akN
a3
24
4x =+++
−
νν 10.24
ou seja
DaN
Dpw4
dxwd x344
4 νβ −=+ 10.25
com ( )22
24
ae13 ν
β−
=
Note-se que a xN pode ser obtido através da equação
0pdx
dN1
x =+ ou seja dxpN 1x0x ∫−= 10.26
sendo xN independente da deformação da casca cilíndrica e constante em todo o
comprimento da casca. No caso de ser 0p1 = , como é o caso de um reservatório de
pressão, xN é uma constante calculada através das condições de fronteira.
A solução geral da equação pode ser escrita com a forma:
pc www += 10.27
sendo cw a solução complementar da equação em 2º membro e pw uma solução
particular da equação.
A solução da equação
0w4dx
wd 44
4
=+ β 10.28

Flexão de Cascas Cilíndricas 3.11
toma a forma
mx
m1m
c eAw ∑==
10.29
sendo mA constantes arbitrárias.
Substituindo 10.29 em 10.28 obtém-se:
( ) 0e4mA mx44m =+Σ β 10.30
donde obtém a equação característica com a forma
04m 44 =+ β ou seja 4 12m −±= β 10.31
A solução complementar cw , toma a forma:
( ) ( ) ( ) ( ) xi1
4xi1
3xi1
2xi1
1c eAeAeAeAw ββββ −−+−−+ +++= 10.32
Tendo em conta que:
( ) ( )xixixixi ee21xseneee
21xcos ββββ ββ −− −=+= 10.33
obtém-se a solução complementar com a forma:
xseneCxcoseCxseneCxcoseCw x4
x3
x2
x1c ββββ ββββ −− +++= 10.34
A solução particular da equação 10.25 pode ser considerada com a forma:
−=
aNp
eEaw x
3
2
pν 10.35
Uma vez conhecido o deslocamento w, os esforços são facilmente calculados.

Flexão de Cascas Cilíndricas 3.12
10.2.1Casca Cilíndrica Semi-Infinita Sujeita a uma Distribuição Axissimétrica de
Momentos e Esforços Transversos
Considere-se uma casca cilíndrica de comprimento semi-infinita sujeita a uma
carga axissimétrica, uma distribuição uniforme de momentos e esforços transversos
unitários, como se representa na figura 10.3. A origem do sistema de eixos é
considerada na extremidade em que se consideram aplicados os momentos e os esforços
transversos.
A solução geral da equação 10.25 tem a forma:
( ) ( )
−++++= −
aNp
eEaxsenCxcosCexsenCxcosCew x
3
2
43x
21x ν
ββββ ββ 10
No caso de casca da figura 10.3, 0Np x3 == e por outro lado o deslocamento deve
decrescer à medida que x aumenta, consequentemente os termos de w que contêm xeβ
devem ser eliminados, a solução toma a forma:
( ) ( )xsenCxcosCexw 43x βββ += − 10.37
Figura 10.3: Casca cilíndrica semi-infinita sujeita a esforços transversos e momentos
no extremo.
As condições de fronteira são:
para x = 0 ox MM = e ox TT = 10.38
a
w
x, u o
oT
oT oM
oM

Flexão de Cascas Cilíndricas 3.13
Os momentos flectores e os esforços transversos unitários são facilmente
calculados a partir de w, por uso das equações
2
2
x dxwdDM −= e 3
3x
x dxwdD
dxdMT −== 10.39
ou seja
[ ]xsenCxcosCeD2M 34x2
x βββ β −+= −
( ) ( )[ ]xsenCCxcosCCeD2T 4334x3
x βββ β −++−= − 10.40
Substituindo as condições 10.38 nas equações 10.40 obtém-se:
para x = 0
o42 MCD2 =β ou seja
D2MC 2
o4 β=
( ) o433 TCCD2 =+− β ou seja
D2T
D2MC 3
o2o
3 ββ−−= 10.41
Substituindo as constantes 10.41 na equação 10.37 obtém-se:
( ) ( ) xcosD2
Txcosxsene
D2M
xw 3ox
2o β
βββ
ββ −−= − 10.42
Substituindo as constantes 10.41 nas expressões 10.40 obtém-se os momentos e
esforços transversos com a forma seguinte:
( ) xseneTxsenxcoseMM xoxox β
βββ ββ −− ++=
[ ]xsenxcoseTxseneM2T xo
xox ββββ ββ −+−= −− 10.43
Na extremidade x = 0, o deslocamento é máximo e tem o valor
( )
+−=
D2T
D2M
0w 3o
2o
ββ 10.44

Flexão de Cascas Cilíndricas 3.14
e a inclinação é:
( )D2
TD
Mdxdw0 2
oo
0x ββθ +=
=
=
10.45
As expressões 10.43 permitem a obtenção das tensões resultantes da aplicação de
momentos e esforços transversos no extremo de uma casca cilíndrica longa.
10.2.2Casca Cilíndrica Curta Sujeita a Distribuição Axissimétrica de Momentos e
Esforços Transversos nos Extremos
Considere-se uma casca cilíndrica de dimensão finita sujeita a distribuição de
momentos e esforços transversos nos extremos como se representa na figura 10.4, na
ausência de esforços axiais, 0N x = e na ausência de pressão interior, 0p3 = . A
solicitação pode considerar-se simétrica em relação ao plano médio como se representa
na figura. Nestas condições a solução geral da equação 10.25 tem a forma:
( ) ( )xsenCxcosCexsenCxcosCew 43x
21x ββββ ββ +++= − 10.46
Figura 10.4: Casca cilíndrica curta sujeita a distribuição de esforços transversos e
momentos nos extremos.
Esta solução pode ser escrita com a forma: ( ) ( ) ( )xLseneCeCxseneCxcoseCw xL
4xL
3x
2x
1 −+++= −−−−−− βββ ββββ
10.47 ou
( ) ( ) ( )[ ] ( )[ ]xLBCxLACxBCxACw 4321 −+−++= ββββ 10.48
oT
a x o
oT
oM
oM
oT
oT
oM
oM
L

Flexão de Cascas Cilíndricas 3.15
onde
( ) xcosexA x ββ β−= e ( ) xsenexB x ββ β−=
Nestas condições, as expressões seguinte para os momentos e esforços
transversos são:
( ) ( ) ( )[ ] ( )[ ]{ }xLACxLBCxACxBCD2M 43212
x −−−+−−= βββββ
( ) ( ) ( ) ( ){ }21213
x CCxBCCxAD2T −−+−= βββ 10.49
Devido à simetria de carregamento deve considerar-se
4231 CCeCC ==
As condições de fronteira são:
para x = 0 ox MM = e ox TT =
para x = L ox MM = e ox TT = 10.50
Substituindo estas condições nas equações 10.49 e tendo em conta as condições
de simetria obtém-se:
( ) ( )[ ]{ }LA1CLBCD2M 212
o βββ +−−=
( ) ( )[ ] ( ) ( )[ ]{ }LBLA1CLBLA1CD2T 213
o βββββ −−++−−= 10.51
donde se obtém:
( ) ( )[ ] ( )[ ]
++−∆
−== LA1D2
TLC1
D2M
L1CC 3
o2o
13 ββ
βββ
( ) ( )[ ] ( )
−−∆
−== LBD2
TLD1
D2M
L1CC 3
o2o
24 ββ
βββ
10.52
( ) ( ) ( ) [ ]LsenLcoseLBLALC L βββββ β +=+= −
( ) ( ) ( ) [ ]LsenLcoseLBLALD L βββββ β −=−= −
e

Flexão de Cascas Cilíndricas 3.16
( ) ( )[ ] ( )[ ] ( ) ( )[ ] ( )LsenLsenhe2LC1LBLD1LA1L L βββββββ β +=−+−+=∆ −
O deslocamento, ow e a inclinação oθ para x = 0 são facilmente obtidas, sendo
( ) ( ) ( )
+−=
D2T
LD2
ML0w 3
oH2
oM β
βδβ
βδ
( ) ( ) ( )D2
TL
DM
Ldx
dw0 2
oH
oM
o
ββθ
ββθθ +== 10.53
onde
( ) ( )LsenLsenhLsenLsenhLL HM ββ
βββθβδ
+−
==
( )LsenLsenhLcosLcoshLH ββ
βββδ
++
=
( )LsenLsenhLcosLcoshLM ββ
βββθ
+−
=
10.2.3 Casca Cilíndrica Submetida a Carregamentos Antissimétricos nos Extremos
Considere-se a casca cilíndrica finita, representada na figura 10.5, sujeita a
carregamentos uniformes de esforços transversos e momentos flectores antissimétricos
em relação ao plano médio.
Figura 10.5: Carga antissimétrica. Casca cilíndrica.
oT
oT
oT
oT
a o
oM
oM
oM
oM
L

Flexão de Cascas Cilíndricas 3.17
O deslocamento radial, w tem a forma geral:
( ) ( ) ( )[ ] ( )[ ]xLBCxLACxBCxACw 4321 −+−++= ββββ 10.54
Como o carregamento é antissimétrico
31 CC −= e 42 CC −=
As condições de fronteira são:
para x = 0 ox MM = e ox TT =
para x = L ox MM −= e ox TT −= 10.55
Substituindo uma destas condições nas equações 10.49 obtém-se as constantes
( ) ( )[ ] ( )[ ]
−++∆
−=−= LA1D2
TLC1
D2M
L1CC 3
o2o
131 β
ββ
ββ
( ) ( )[ ] ( )
++∆
=−= LBD2
TLD1
D2M
L1CC 3
o2o
142 β
ββ
ββ 10.56
onde as funções ( )LA β , ( )LB β , ( )LC β e ( )LD β são as funções definidas no caso
anterior e
( ) ( )[ ] ( )[ ] ( ) ( )[ ] [ ]LsenLsenhe2LC1LBLD1LA1L L1 βββββββ β −=+−+−=∆ −
10.57 O deslocamento e a inclinação para x = 0 são:
( ) ( ) ( )
+−=
D2T
LD2
ML0w 3
o'H2
o'm β
βδβ
βδ
( ) ( ) ( )D2
TL
DM
Ldx
dw0 2
o'H
o'm
o
ββθ
ββθθ +== 10.58
onde
( ) ( )LsenLsenhLsenLsenhLL '
H'm ββ
βββθβδ
−+
==

Flexão de Cascas Cilíndricas 3.18
( )LsenLsenhLcosLcoshL'
H ββββ
βδ−−
=
( )LsenLsenhLcosLcoshL'
H ββββ
βθ−+
=
10.2.4Casca Cilíndrica Finita Sujeita a Distribuição Uniforme de Momentos e
Esforços Transversos nos Extremos
Considere a casca cilíndrica finita representada na figura 10.6 sujeita a esforços
transversos e momentos uniformemente distribuídos numa das extremidades.
As condições de fronteira são:
para x = 0 ox MM = e ox TT =
para x = L 0Mx = e 0Tx = 10.59
A expressão da deformada é:
( ) ( ) ( )[ ] ( )[ ]xLBCxLACLBCLACw 4321 −+−++= ββββ 10.60
e os esforços são:
( ) ( ) ( )[ ] ( )[ ]{ }xLACxLBCxACxBCD2M 43212
x −−−+−−= βββββ
( ) ( ) ( ) ( ){ }21213
x CCxBCCxAD2T −−+−= βββ 10.61
Substituindo as condições 10.59 nas equações 10.62 obtém-se o sistema de
equações seguinte:
( )
−−
=
+−−−−−−+−−−
D2/TD2/M
00
CCCC
BAABAAAB1011BABA10AB
3o
2o
4
3
2
1
ββ
10.62
onde ( ) ( )LBBeLAA ββ ==

Flexão de Cascas Cilíndricas 3.19
Figura 10.6: Casca cilíndrica sujeita a esforços num dos extremos.
Resolvendo o sistema de equações 10.62, obtém-se:
[ ] [ ]324112141 /MTC αααααα −−=
[ ] [ ]413213112 /MTC αααααα −−=
( ) ( ) 213 CBA2CB2AC ++−=
214 CACBC −= 10.63
onde ( )LAA β= , ( )LBB β= , B21 −=α , [ ]222 BAAB21 +++−=α ,
AB2AB3A 223 +−−=α , 22
4 ABAB2A −++=α , D2/TT 3o1 β= e
D2/MM 2o1 β=
O deslocamento e a inclinação para x = 0 e para x = L são:
−+
−+
−−−
−= 11o T2L2cosL2cosh
L2senL2senhM2L2cosL2cosh
L2cosL2coshwββββ
ββββ
D2T
2L2cosL2coshL2cosL2cosh
DM
2L2cosL2coshL2senL2senh
dxdw
2ooo
βββββ
βββββ
−+
−+
−+
+−=
oT
oT
a
oM
oM
L
x

Flexão de Cascas Cilíndricas 3.20
( ) ( )
−+
−+
−+−−= 11L T
2L2cosL2coshLsenLcoshLcosLsenh2M
2L2cosL2coshLsenLsenh4w
ββββββ
ββββ
( )
−+
+−+
+−−=
D2T
2L2cosL2coshlsenLsenh4
DM
2L2cosL2coshLsenLcoshLcosLsenh2
dxdw
3ooL
βββββ
βββββββ
10.64 O mesmo resultado seria obtido se a solução tivesse sido obtida considerando os
resultados dos casos 10.2.2 e 10.2.3, usando o princípio da sobreposição de efeitos.
O efeito de bordo manifesta-se até uma certa distância tornando-se irrelevante a
partir de determinado valor de x. As soluções têm todas as mesmas características, uma
constante a multiplicar por um factor que exibe um andamento exponencial tendente
para zero do tipo oscilatório. O deslocamento, a inclinação, o momento flector e o
esforço transverso diminuem com xe β− , uma vez que ( )[ ] ea13 4/12νβ −= , eax
é um parâmetro que caracteriza o comportamento da casca. Por exemplo, 4eax =
ocorre quando 12.5x =β , para o qual é 005976.0e x =β− que é uma quantidade
insignificante. Pode portanto afirmar-se que para distâncias ea4LB > , os efeitos de
bordo são irrelevantes. A quantidade ae4LB = é conhecida por comprimento de
atenuação dos efeitos de bordo ou comprimento do amortecimento.
10.2.5 Casca Cilíndrica Longa Sujeita a um Anel de Carga
Considere-se a casca cilíndrica representada na figura 10.7 sujeita a uma carga
uniformemente distribuída de intensidade H como se representa.
Figura 10.7: Casca cilíndrica sujeita a um anel de carga.
ET
oT
P
P
oT
ET
P
a
x
z

Flexão de Cascas Cilíndricas 3.21
Na ausência de pressão interior e tendo em conta a simetria e o facto de a casca
ser longa, 0w → com ∞→x , o deslocamento radial w por ser considerado com a
forma:
( )xsenCxcosCew 21x βββ += − 10.65
Os esforços são calculados fazendo uso das expressões:
2
2
x dxwdDM −= 2
2
dxwdDM νθ −= e 3
3
x dxwdDT −=
0N x = e a
weEN =θ 10.66
As condições de fronteira aplicadas, tendo em conta que 2PTT ED == , são:
2P
dxwdDT 3
3
x −=−= e 0dxdw
= 10.67
Considerando estas condições 10.67 e a equação 10.65 obtém-se:
D8PCC 321 β
==
Consequentemente o deslocamento pode ser escrito com a seguinte forma:
( )xcosxsenD8
ePw 3
x
βββ
β
+=−
ou
+=
−
4xsen2
D8ePw 3
x πβ
β
β
10.68
O deslocamento atenua-se com a distância como uma onda de um
exponencialmente amortecido.
Flexão de Cascas Cilíndricas 3.22
O deslocamento máximo e momento máximo, para x = 0, são:
eE2aP
D8Pw
2
3maxβ
β== e
β4PMmax = 10.69
As tensões de flexão máximas ocorrem para x = 0 e z = c/2 e são calculadas tendo
em conta que
33xx
x tzM12
tN;
ezM12
eN θθ
θσσ +=+= 10.70
Os esforços são 0Nx = , a/weEN −=θ , xM definido de acordo com 10.69
e xMM ν=θ , consequentemente:
2max,x e2P3β
σ = e
+−= 22max, e
3ea
2P
βνβ
σθ 10.71
O efeito da carga localizada no anel pode ser desprezado para distâncias
βπ> /x sendo a flexão produzida por este tipo de carga do tipo localizado.
10.2.6Casca Cilíndrica Longa Sujeita a uma Carga Superficial Uniformemente
Distribuída numa Distância Pequena
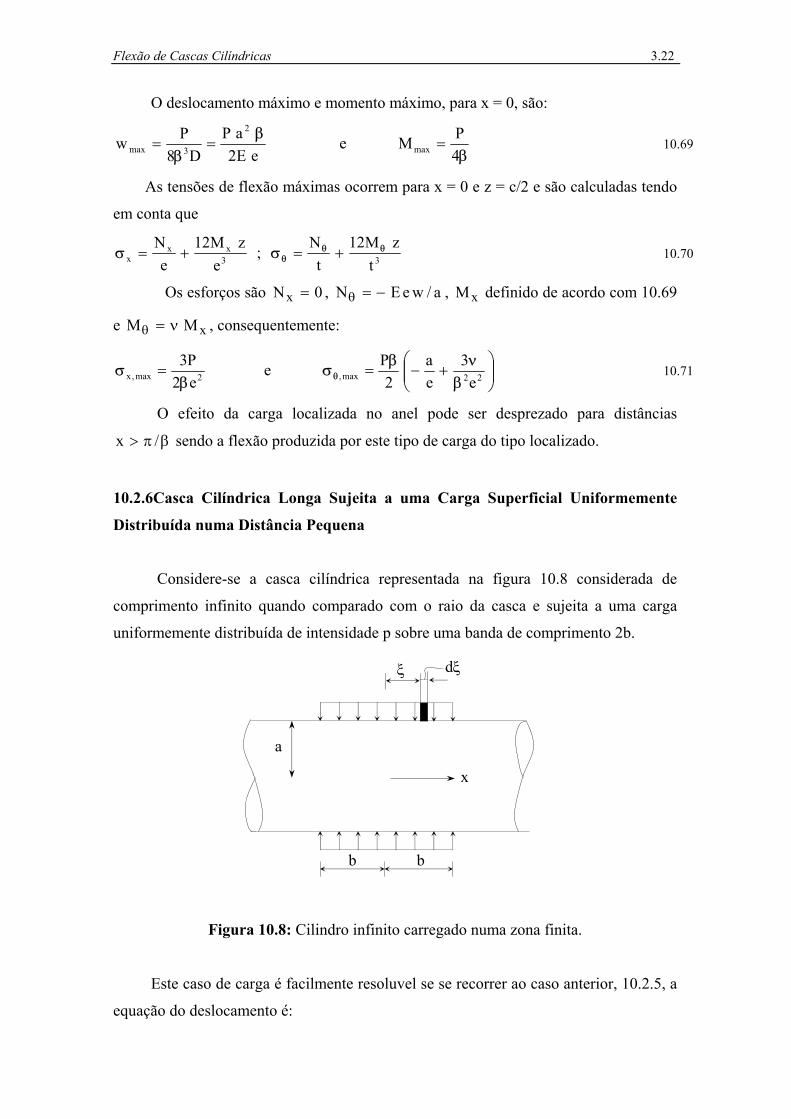
Considere-se a casca cilíndrica representada na figura 10.8 considerada de
comprimento infinito quando comparado com o raio da casca e sujeita a uma carga
uniformemente distribuída de intensidade p sobre uma banda de comprimento 2b.
Figura 10.8: Cilindro infinito carregado numa zona finita.
Este caso de carga é facilmente resoluvel se se recorrer ao caso anterior, 10.2.5, a
equação do deslocamento é:
a
x
b b
ξ dξ

Flexão de Cascas Cilíndricas 3.23
( )xcosxseneD8
Pw x3 ββ
ββ +±= ±
00
x><
10.72
Os sinais - são usados para valores negativos de x e + são usados para valores
finitos de x. No caso de se mover a carga da posição x = 0 para a posição ξ=x a
equação 10.72 toma a forma:
( ) ( ) ( )[ ]ξβξββ
ξβ −+−±= −± xcosxseneD8
Pw x3 para
ξ>ξ<
x 10.73
como resulta de substituir x por ξ−x .
Tendo em conta que ξ= dpP e somando o efeito das cargas no intervalo - b, b
deve obter-se a resposta da casca para a carga atribuída. Note-se que é necessário
distinguir dois intervalos, o intervalo - b < x < b e x > b ou x < - b.
No intervalo x > b é:
( ) ( ) ( )[ ] ξξβξββ
ξβ dxcosxseneD8
pw xbb3 −+−∫= −−
−
( ) ( ) ( ) ( )[ ] [ ]bxbxcosebxcoseD8
p bxbx4 >+−−= +−−− ββ
βββ 10.74
No intervalo - b < x < b existe carga para ambos os lados do ponto de coordenada
x, e é:
( ) ( ) ( )[ ]{ +−+−∫= −−− ξξβξβ
βξβ dxcosxsene
D8pw xx
b3
( ) ( ) ( )[ ] }=−+−−∫+ − ξξβξβξβ dxcosxsene xbx
( ) ( ) ( ) ( )[ ]bxcosebxcose2D8
p bxbx4 −−+−= −−+− ββ
βββ 10.75
Uma vez conhecido o deslocamento é fácil a obtenção dos esforços e das tensões
correspondentes.
10.2.7 Cascas Cilíndricas Reforçadas por Anéis
Flexão de Cascas Cilíndricas 3.24
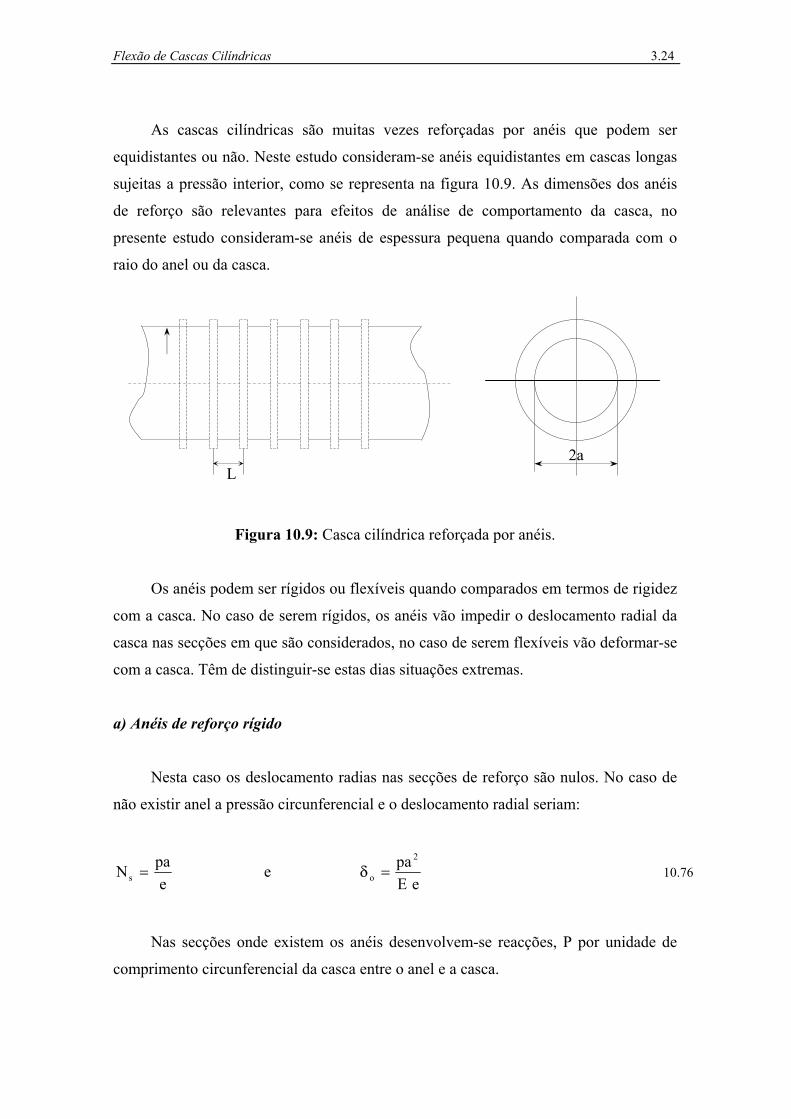
As cascas cilíndricas são muitas vezes reforçadas por anéis que podem ser
equidistantes ou não. Neste estudo consideram-se anéis equidistantes em cascas longas
sujeitas a pressão interior, como se representa na figura 10.9. As dimensões dos anéis
de reforço são relevantes para efeitos de análise de comportamento da casca, no
presente estudo consideram-se anéis de espessura pequena quando comparada com o
raio do anel ou da casca.
Figura 10.9: Casca cilíndrica reforçada por anéis.
Os anéis podem ser rígidos ou flexíveis quando comparados em termos de rigidez
com a casca. No caso de serem rígidos, os anéis vão impedir o deslocamento radial da
casca nas secções em que são considerados, no caso de serem flexíveis vão deformar-se
com a casca. Têm de distinguir-se estas dias situações extremas.
a) Anéis de reforço rígido
Nesta caso os deslocamento radias nas secções de reforço são nulos. No caso de
não existir anel a pressão circunferencial e o deslocamento radial seriam:
epaNs = e
eEpa 2
o =δ 10.76
Nas secções onde existem os anéis desenvolvem-se reacções, P por unidade de
comprimento circunferencial da casca entre o anel e a casca.
L2a

Flexão de Cascas Cilíndricas 3.25
Para efeitos de cálculo de P, é necessário calcular o deslocamento radial
produzido na casca como resultado de P, o qual deve ser em grandeza igual ao
deslocamento produzido pela pressão p, a fim de anular o deslocamento na secção do
anel. O momento na secção do anel, oM , pode ser calculado impondo a condição
dw/dx = 0 numas das extremidades do troço da casca entre os anéis. Entre anéis a casca
está solicitada de acordo com a representação da figura 10.10.
Figura 10.10: Acções entre anéis.
O deslocamento radial e a inclinação para cascas curtas sujeitas a esforços
simétricos oo T,M nos extremos são:
++
++−
−=LsenLsenhLcosLcoshT
LsenLsenhLsenLsenhM
eEa2w oo
2
ββββ
ββββ
ββ
+−
++−
±=LsenLsenhLsenLsenhT
LsenLsenhLcosLcoshM2
eEa2
dxdw
oo
22
ββββ
ββββ
ββ 10.77
Impondo a condição dw/dx = 0 e tendo em conta que 2/PTo = , obtém-se:
0LsenLsenhLsenLsenh
LcosLcoshLcosLcoshM4
eEa
o
22
=
+−
−−−
ββββ
ρββββ
ββ 10.78
ou seja
LcosLcoshLsenLsenh
4PMo ββ
βββ −
−= 10.79
oM
oM
oT a
x
oT
oM
oM oT
oT
p

Flexão de Cascas Cilíndricas 3.26
Substituindo 10.79 na primeira das equações 10.77 e igualando o deslocamento a
eE/pa 21 =δ , deslocamento resultante da pressão, obtém-se:
( )( ) ( ) eE
paLsenLsenhLcosLcosh2
LsenLsenhlsenLsenhLcosLcosh
eEaP 2
o
22
==
+−−
−++
δββββ
βββββββ
10.80 ou seja
( )( ) ( ) p
aeE
LsenLsenhLcosLcoshLsenLsenh
21
LsenLsenhLcosLcoshP 2
o2
==
+−−
−++ δ
ββββββ
ββββ
β
10.81
No caso de Lβ ser muito elevado, a parcela dentro de parêntesis recto tendo para
1/2 obtém-se
1
2
eE2aP
δβ
= 10.82
b) Anéis flexíveis
No caso dos anéis de reforço serem flexíveis, o deslocamento radial da casca na
secção do anel não é nulo.
As forças na ligação anel - casca provocam um aumento do raio interior do anel
que é:
AEPaa
AEPaw
2
=
=∆ 10.83
onde A é área da secção recta e Pa é a força de tracção no anel.
Substituindo na equação 10.80 oδ por wo1 ∆−δ=δ , obtém-se a equação que
permite o cálculo de P na secção do anel e que é:
( )( ) ( ) A
ePpLsenLsenhLcosLcosh2
LsenLsenhLsenLsenhLcosLcoshP
2
−=
+−−
−++
ββββββ
ββββ
β 10.84
Flexão de Cascas Cilíndricas 3.27
Resolvendo a equação anterior em ordem a P e substituindo na equação do
momento, 10.79, obtém-se:
LsenLsenhLsenLsenh.
APtp
21M 21 ββ
βββ +
−
−= 10.85
que representa o momento na casca junto ao anel.
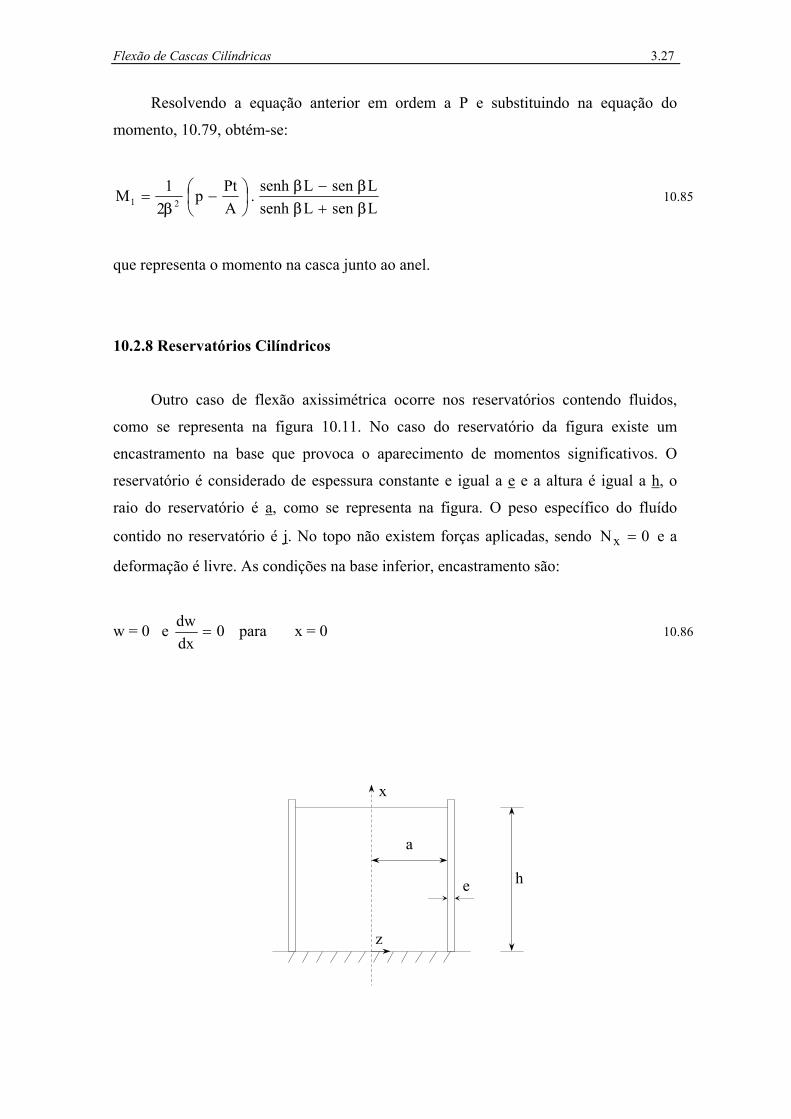
10.2.8 Reservatórios Cilíndricos
Outro caso de flexão axissimétrica ocorre nos reservatórios contendo fluidos,
como se representa na figura 10.11. No caso do reservatório da figura existe um
encastramento na base que provoca o aparecimento de momentos significativos. O
reservatório é considerado de espessura constante e igual a e e a altura é igual a h, o
raio do reservatório é a, como se representa na figura. O peso específico do fluído
contido no reservatório é j. No topo não existem forças aplicadas, sendo 0Nx = e a
deformação é livre. As condições na base inferior, encastramento são:
w = 0 e 0dxdw
= para x = 0 10.86
a
z
e h
x

Flexão de Cascas Cilíndricas 3.28
Figura 10.11: Reservatório cilíndrico.
A equação de equilíbrio em termos dos deslocamentos é:
Dpw4
dxwd 44
4
=+ β 10.87
sendo ( )xhp −−= γ .
Uma solução particular da equação 10.87 pode ser ( ) eE/axh 2−γ− e a
solução geral da equação toma a forma:
[ ] [ ] ( ) 243
x21
x aeE
xhxsenCxcosCexsenCxcosCew −−+++= − γ
ββββ ββ
10.88
A espessura é considerada pequena quando comparada com a e h e h é
considerado elevado quando comparado com a e neste caso podem considerar-se
0CC 43 == . As constantes 21 CeC são calculadas considerando as condições de
fronteira para x = 0, que são:
0eE
haCw2
1 =−=γ e ( ) 0
eEaCC
dxdw 2
12 =+−=γ
β
donde eE
haC2
1γ
= e
−=β
γ 1heE
aC2
2 10.89
A equação 10.88 toma a forma:
−+−−= − xsen
h11xcose
hx1
eEhaw x
2
ββ
βγ β 10.90
O deslocamento axial é:
oho udx
awu +∫= ν ou ( )0u0xdx
awu o
h
o==ν= ∫

Flexão de Cascas Cilíndricas 3.29
As tensões resultantes são obtidas a partir dos esforços que são:
−+−−=−= − xsen
h11xcose
hx1ha
aweEN x β
ββγ β
θ
−−=−= − xsen
h11xcose
eEhDa2
dxwdDM x
22
2
2
x ββ
βγβ β
xMM νθ = 10.91
No caso de se considerar a secção x = 0, obtém-se o momento flector máximo que
é:
( )eE
hDa2h
11M22
maxxγβ
β
−= 10.92
donde se poderia obter facilmente a tensão, xσ , máxima.





![$2 , &$ 1-.)-+ . 3*' ( .#¿ρτσα... · ub> qdjDibnfg\ uZtjljq^o [j^ prjqlixqbnl anxil`f^qfoKja]bopqfoNb`ZhboDjq]hhboLly ... q\qdj^mxs^pdim^]jbfd_Zpd`f^qdjmh\ndaf g^]vpdg^f^mlcdi]vpdqvjmnzdjbn`^cli[jvj](https://static.fdocument.org/doc/165x107/5c9b1a5709d3f28d6a8b49a9/2-1-3-ub-qdjdibnfg-uztjljqo-j-prjqlixqbnl.jpg)



