Exam Auto Control 2011
7
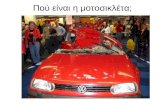
Course ID: MECH ENG 3028 Page 2 of 12 PART 1 AUTOMATIC CONTROL 2 (Total 50 Marks) For marine vessels moving in 6 degrees of freedom (DOF), 6 independent coordinates are necessary to determine position and orientation. These are defined as surge ( b x ), sway ( b y ), heave ( b z ), roll ( φ ), pitch ( θ ) and yaw ( ψ ). Figure 1 illustrates these positions and the Euler angles and their corresponding velocity terms ( r q p w v u , , , , , respectively). Figure 1: Motion variables and corresponding velocities for a marine vessel * All modern ships use autopilots for course keeping and turning control. Your task is to build such a system for an oil tanker. The 6 DOF dynamics for marine vessels are non-linear and depend on many variables such as forward velocity, side-slip angle, sea state, etc. For an auto-pilot we are only interested in maintaining heading at cruise. It turns out that yaw (heading) and sway are coupled. Therefore a linear manoeuvring model based on the assumption of constant cruise speed which accounts for sway and yaw is given by † ) 1 ( 04 . 0 22 . 0 23 . 0 01 . 0 87 . 0 25 . 0 u B x A δ − + − − − − = r v r v where m/s b y v = is the sway velocity, s / ψ = r is the yaw rate (rate of heading change), ψ is the yaw (or heading) angle in degrees and δ is the rudder angle in degrees (defined such that positive rudder angle yields a positive yaw rate). * Society of Naval Architects and Marine Engineers 1950 † Fossen 2002, “Marine Control Systems”, pg 498
-
Upload
akmal-bhatti -
Category
Documents
-
view
225 -
download
0
description
Exam solution of dynamics and control 2
Transcript of Exam Auto Control 2011

Course ID: MECH ENG 3028 Page 2 of 12
PART 1 AUTOMATIC CONTROL 2 (Total 50 Marks)
For marine vessels moving in 6 degrees of freedom (DOF), 6 independent coordinates are necessary to determine position and orientation. These are defined as surge ( bx ), sway ( by ), heave ( bz ), roll (φ ), pitch (θ ) and yaw (ψ ). Figure 1 illustrates these positions and the Euler angles and their corresponding velocity terms ( rqpwvu ,,,,, respectively).
Figure 1: Motion variables and corresponding velocities for a marine vessel* All modern ships use autopilots for course keeping and turning control. Your task is to build such a system for an oil tanker. The 6 DOF dynamics for marine vessels are non-linear and depend on many variables such as forward velocity, side-slip angle, sea state, etc. For an auto-pilot we are only interested in maintaining heading at cruise. It turns out that yaw (heading) and sway are coupled. Therefore a linear manoeuvring model based on the assumption of constant cruise speed which accounts for sway and yaw is given by†
)1(
04.022.0
23.001.087.025.0
u
BxA
δ
⎥⎦
⎤⎢⎣
⎡
−+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
−−
−−=⎥
⎦
⎤⎢⎣
⎡
rv
rv
where m/sbyv = is the sway velocity, s/ψ=r is the yaw rate (rate of heading change), ψ is the yaw (or heading) angle in degrees and δ is the rudder angle in degrees (defined such that positive rudder angle yields a positive yaw rate).
* Society of Naval Architects and Marine Engineers 1950 † Fossen 2002, “Marine Control Systems”, pg 498

Course ID: MECH ENG 3028 Page 3 of 12
Now answer the following:
1. For the plant given by Equation (1), given that the system output is the yaw rate of the ship, s/ψ=r , then the state output equation is given by, [2 marks] a. [ ] )2(001 uxDuCx +=+==ψr b. [ ] )2(010 uxDuCx +=+==ψr c. [ ] )2(011 uxDuCx +=+==ψr d. [ ] )2(01 uxDuCx +=+==ψr e. None of the above.
2. What Matlab code would you use to build a state space model called ship (assuming that the A, B, C and D matrices had been defined)? [1 mark] a. ship = tf(A,B) b. ship = zpk(A,B,C) c. ship = ss(A,B,C,D) d. ship = statespace(A,B,C,D) e. None of the above.
3. Using Equations (1) and (2), derive the transfer function between the rudder angle (in degrees), δ , and the yaw rate of the ship, s/ψ=r . The transfer function is given by [4 marks]
a. ( ) )3(0488.048.0
)0078.004.0()()(
2 ++
+−=
sss
ssr
δ
b. ( ) )3(0488.048.0)0078.004.0(
)()(
2 ++
+=
sss
ssr
δ
c. ( ) )3(48.00488.0)0078.004.0(
)()(
2 ++
+−=
sss
ssr
δ
d. ( ) )3(0488.048.0
)0122.004.0()()(
2 ++
+−=
sss
ssr
δ
e. None of the above. 4. Determine the locations of the open loop poles of the system. The open loop
poles are given by [2 marks] a. rad/s0,0=s b. rad/s334.0,146.0 −−=s c. rad/s48.0,0488.0 −−=s d. rad/s48.0,0488.0 iis −−= e. None of the above.

Course ID: MECH ENG 3028 Page 4 of 12
5. Is the open loop plant [1 mark] a. Stable? b. Marginally stable? c. Unstable? d. Conditionally stable? e. None of the above.
6. The transfer function given by Equation (3) (in Question 3) contains a minus sign. Discuss what this implies. [2 marks] a. The ship dynamics are unstable b. The ship dynamics are non-minimum phase c. The ship dynamics are minimum phase d. The ship experiences positive yaw for a negative rudder angle e. The ship is difficult to control.
7. Approximately how long would the plant take to settle within 2% to an impulse in to the rudder? [2 marks] a. ~0.5 s? b. ~10 s? c. ~0.5 minute? d. ~30 minutes? e. None of the above.
8. Calculate the open-loop zero(s) between the rudder input δ , and the output yaw rate s/ψ=r . The zeros are: [3 marks] a. There are no zeros b. rad/s0=s c. rad/s305.0−=s d. rad/s480.0−=s e. None of the above.
9. Assuming that you had built the state space model in Matlab, what code below would you use to determine the zeros of the system? [1 mark] a. zeros(A) b. zero(A) c. zeros(ship) d. zero(ship) e. All of the above.
10. Is the plant strongly stabilisable? [2 marks]
a. Yes b. No c. Unsure d. There is insufficient information e. All of the above.

Course ID: MECH ENG 3028 Page 5 of 12
11. Using Equation (1) and assuming that the two states are zero, what is the
largest rudder angle that can be input without the sway acceleration exceeding 10% of gravity (where 2m/s81.9=g )? [3 marks] a. 1 degree b. 4.5 degrees c. 25 degrees d. 45 degrees e. None of the above.
12. Given that the rank of the A matrix in Equation (1) is 2, what is the minimum number of states required to model the system? [2 marks] a. None b. One c. Two d. Three e. None of the above.
13. Rewrite the State Equation (1) and Output Equation (2) in observer canonical right companion form, [3 marks]
a. [ ]xxx 10,04.022.0
23.001.087.025.0
=⎥⎦
⎤⎢⎣
⎡
−+⎥
⎦
⎤⎢⎣
⎡
−−
−−= rδ
b. [ ]xxx 0122.004.0,01
010488.048.0
−−=⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡ −−= rδ
c. [ ]xxx 01,0122.004.0
00488.0148.0
=⎥⎦
⎤⎢⎣
⎡
−
−+⎥
⎦
⎤⎢⎣
⎡
−
−= rδ
d. [ ]xxx 10,04.00122.0
48.010488.00
=⎥⎦
⎤⎢⎣
⎡
−
−+⎥
⎦
⎤⎢⎣
⎡
−
−= rδ
e. None of the above.
14. Which of the block diagrams following represent the open-loop plant given by Equations (1) and (2)? [3 marks]
a.
x1x1x2x2
-0.25
rδ0
1
0
-0.01
-0.87
-0.23
-0.04
0.22

Course ID: MECH ENG 3028 Page 6 of 12
b.
c.
d. e. None of the above.
x1x1x2x2
-0.87
rδ1
0
-0.23
-0.25
-0.01
-0.04
0.22
0
x1x1x2x21 rδ
0
1
0
-0.0488
-0.0122
-0.48
-0.04
0
x1x1x2x2
0
rδ
0
1
-0.0488
-0.48
-0.04 0
1
-0.0122

Course ID: MECH ENG 3028 Page 7 of 12
15. Which of the block diagrams above represent the plant in observer canonical form derived previously in Question 13? [3 marks] a. (a) b. (b) c. (c) d. (d) e. None of the above.
16. Using the state equations given by Equation (1), calculate the controllability matrix and determine how many (if any) of the plant states are controllable. Hint: Relate this to the block diagram in Question 14 above. [3 marks] a. No states are controllable b. One state is controllable c. Two states are controllable d. One state is controllable and one is stabilisable e. None of the above.
17. If you were to repeat the exercise in Question 16 using Matlab, the code would
be: [1 mark] a. zeros(obsv(A,C)) b. rank(ctrb(A,B)) c. eig(ctrb(A,B)) d. cond(obsv(A,C)) e. None of the above.
18. You are going to design a full state feedback controller for the plant. You have an initial choice of 4 sets of control gains which are listed below along with the resulting pole locations. Choose the set of gains that result in pole-zero cancellation. [2 marks] a. [ ] [ ]9.2356.121 −== kkK resulting in rad/s45.1,326.0 −−=s b. [ ] [ ]96.5412.021 −== kkK resulting in rad/s488.0,321.0 −−=s c. [ ] [ ]57.3251.021 −== kkK resulting in rad/s372.0,305.0 −−=s d. [ ] [ ]20.2157.021 −== kkK resulting in rad/s343.0,260.0 −−=s e. None of the above.

Course ID: MECH ENG 3028 Page 8 of 12
19. In order to model the yaw angle it is necessary to add a third state, namely the yaw angle, ψ , which is the integral of yaw rate. Which of the state equations below represent the plant with the feedback gains in Question 18 applied? [4 marks]
a. δ
ψψ ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
004.022.0
0100373.000086.0305.0rv
rv
b. δ
ψψ ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
004.022.0
010023.001.0087.025.0rv
rv
c. δ
ψψ ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
004.022.0
1000123.0005.00870.0981.0rv
rv
d. δ
ψψ ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
001
1000123.0005.00870.0981.0rv
rv
e. None of the above. 20. It can be shown that the condition number of the observability matrix of the
system is equal to 105. Using this, we can see that [2 marks] a. Any estimates of the states will be accurate b. Any estimates of the states will be extremely inaccurate c. The states cannot be estimated at all d. A reduced order observer is essential e. None of the above.
21. Given the choice of pole locations for the closed loop system (in Question 18), what would be suitable pole locations for a closed loop full state observer? [2 marks] a. rad/s03.0,03.0 −−=s b. rad/s3.0,3.0 −−=s c. rad/s3,3 −−=s d. rad/s30,30 −−=s e. None of the above.
22. If you were to build a compensator (using the control gains from Question 18)
based on a full state observer, how many states would it contain? [2 marks] a. 1 b. 2 c. 3 d. 4 e. None of the above.



![[Title will be auto-generated]](https://static.fdocument.org/doc/165x107/568bde9e1a28ab2034ba27cc/title-will-be-auto-generated-56e1db228cf2a.jpg)