Enrique R. Pujals enrique@impa · different backgrounds... Robust and generic dynamics Enrique R....
192
Robust and generic dynamics Enrique R. Pujals [email protected] May 2011, SIAM Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 1 / 29
Transcript of Enrique R. Pujals enrique@impa · different backgrounds... Robust and generic dynamics Enrique R....
-
different backgrounds...
Robust and generic dynamics
Enrique R. [email protected]
May 2011, SIAM
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 1 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Setting
Continuous dynamics
ẋ = F (x)
t → Φt (x)
Discrete dynamics
Smooth map, f : M → M, where M is a smooth compact manifold
x f (x) f 2(x) · · · f n(x) f n+1(x)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 2 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?
Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?
“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
Goal
We can “compute the trajectories“ “to describe the dynamics”
Existence of periodic trajectories?Assymptotic behavior of the trajectories? attractors?“chaotic”?
Can we trust what we get from numerical approximation?
How do we interpret the numerical solutions?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 3 / 29
-
different backgrounds...
A taxonomy could help
“A CLASSIFICATION of possible dynamics”would help to interpret the results
A “TAXONOMY“ of generic well described dynamical behaviors
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 4 / 29
-
different backgrounds...
A taxonomy could help
“A CLASSIFICATION of possible dynamics”would help to interpret the results
A “TAXONOMY“ of generic well described dynamical behaviors
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 4 / 29
-
different backgrounds...
A taxonomy could help
“A CLASSIFICATION of possible dynamics”would help to interpret the results
A “TAXONOMY“ of generic well described dynamical behaviors
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 4 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“
Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations
Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones)
in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory
in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.
GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.
Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically,
built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
“How to get a Taxonomy”
Looking for the possible generic dynamical scenario
“MODEL OF THE MODELS”
“Reality to be understood“ Mathematical Models.
Dynamical Equations Model of those Mathematical Models
(C. Jones) in theory in delirium (?)
Properties requiere to those Model of models:
DYNAMICALLY WELL DESCRIBED.GENERIC.Easy to treat analytically, built “geometrically”.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 5 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem
3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions.
Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
How to get those model of the models? Example.
Poincaré and 3 body problem3 bodies interacting under their gravitational attraction.
2 body problem/Keplerian problem.
Elliptic motions. Motions are periodic.
Poincaré: 3 body problem as a perturbation of the 2 body one.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 6 / 29
-
different backgrounds...
3 body problem.
Poincaré observed “complicated trajectories”.
“...One will be struck by the complexity of this figure, which I am noteven attempting to draw.”
“...Nothing can give us a better idea of the intricacy of the three-bodyproblem....”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 7 / 29
-
different backgrounds...
3 body problem.
Poincaré observed “complicated trajectories”.
“...One will be struck by the complexity of this figure, which I am noteven attempting to draw.”
“...Nothing can give us a better idea of the intricacy of the three-bodyproblem....”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 7 / 29
-
different backgrounds...
3 body problem.
Poincaré observed “complicated trajectories”.
“...One will be struck by the complexity of this figure, which I am noteven attempting to draw.”
“...Nothing can give us a better idea of the intricacy of the three-bodyproblem....”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 7 / 29
-
different backgrounds...
3 body problem.
Poincaré observed “complicated trajectories”.
“...One will be struck by the complexity of this figure, which I am noteven attempting to draw.”
“...Nothing can give us a better idea of the intricacy of the three-bodyproblem....”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 7 / 29
-
different backgrounds...
3 body problem.
Poincaré observed “complicated trajectories”.
“...One will be struck by the complexity of this figure, which I am noteven attempting to draw.”
“...Nothing can give us a better idea of the intricacy of the three-bodyproblem....”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 7 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;
gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;
it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
How is that possible?
Find a DYNAMICAL CONFIGURATION:
that provides the dynamical properties that we want;gives more information;
it is easy to be detected;it is “UNIVERSAL”.
It can be found in the original problem.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 8 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Infinitely many periodic orbits.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Infinitely many periodic orbits.
Chaotic dynamic.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Poincaré: Homoclinic points.
Homoclinic points: “Points with same past and future"
Infinitely many periodic orbits.
Chaotic dynamic.
It holds in a robust way.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 9 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
Dichotomy
Either the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE:
Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable.
Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point.
There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Homoclic points.
Appears in the 3 body problem.
Perturbed pendulum.
Generic in mechanical problems with at least two degree of freedom
DichotomyEither the dynamics is VERY SIMPLE: Integrable. Morse-Smale inthe non-conservative case,
or there is a transversal homoclinic point. There are chaoticcomponents.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 10 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Transv. Hom. points: source of Hyperbolic theory.
Smale’s Horseshoes:
Hyperbolic Structure
TΛM = Es ⊕ Eu
||Df/Es || < λ < 1, (squeeze) ||Df−1/Eu || < λ < 1, (strecht)
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 11 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,
2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;
3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Nice description of Hyperbolic systems
ROBUST CHAOTIC dynamics.
ROBUST TRANSITIVE dynamics.
1 Infinitely many periodic orbits,2 Stable systems;3 Nice statistical properties.
NICE PICTURE FOR HYPERBOLIC SYSTEMS
Hyperbolicity, a happy story.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 12 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systems
The triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systemsThe triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systemsThe triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systemsThe triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systemsThe triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
Mechanical examples of Hyperbolic systemsThe triple linkage
Geodesic flow in a manifold of negative curvature (Hunt-MacKay).
GLOBAL HYPERBOLIC FLOW.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 13 / 29
-
different backgrounds...
”Robust” implies Hyperbolicity?
There are robust dynamics which are not hyperbolic
Only in higher dimension
For surfaces: Robust chaotic dynamics —-> Hyperbolicity.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 14 / 29
-
different backgrounds...
”Robust” implies Hyperbolicity?
There are robust dynamics which are not hyperbolic
Only in higher dimension
For surfaces: Robust chaotic dynamics —-> Hyperbolicity.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 14 / 29
-
different backgrounds...
”Robust” implies Hyperbolicity?
There are robust dynamics which are not hyperbolic
Only in higher dimension
For surfaces: Robust chaotic dynamics —-> Hyperbolicity.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 14 / 29
-
different backgrounds...
”Robust” implies Hyperbolicity?
There are robust dynamics which are not hyperbolic
Only in higher dimension
For surfaces: Robust chaotic dynamics
—-> Hyperbolicity.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 14 / 29
-
different backgrounds...
”Robust” implies Hyperbolicity?
There are robust dynamics which are not hyperbolic
Only in higher dimension
For surfaces: Robust chaotic dynamics —-> Hyperbolicity.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 14 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;
2 take g : N2 → N2 be either an integrable one (pendulum/forcedpendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
Non-Hyperbolic Robust transitive systems.
1 take f : M2 → M2 Hyperbolic diffeo;2 take g : N2 → N2 be either an integrable one (pendulum/forced
pendulum);
f × g : M2 × N2 → M2 × N2.
PARTIAL HYPERBOLICITY
Arnold’s diffusion
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 15 / 29
-
different backgrounds...
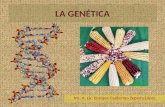
Robust dynamic for flows: Lorenz Attractor
X (x , y , z) =
ẋ = −αx + αyẏ = βx − y − xzż = −γz + xy ,
Lorenz: for parameters close to 10,28,8/3 there is a RobustTransitive Attractor containing a singularity (equilibrium point).
Presences of singularity prevents the hyperbolicity
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 16 / 29
-
different backgrounds...
Robust dynamic for flows: Lorenz Attractor
X (x , y , z) =
ẋ = −αx + αyẏ = βx − y − xzż = −γz + xy ,
Lorenz: for parameters close to 10,28,8/3 there is a RobustTransitive Attractor containing a singularity (equilibrium point).
Presences of singularity prevents the hyperbolicity
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 16 / 29
-
different backgrounds...
Robust dynamic for flows: Lorenz Attractor
X (x , y , z) =
ẋ = −αx + αyẏ = βx − y − xzż = −γz + xy ,
Lorenz: for parameters close to 10,28,8/3 there is a RobustTransitive Attractor containing a singularity (equilibrium point).
Presences of singularity prevents the hyperbolicity
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 16 / 29
-
different backgrounds...
Robust dynamic for flows: Lorenz Attractor
X (x , y , z) =
ẋ = −αx + αyẏ = βx − y − xzż = −γz + xy ,
Lorenz: for parameters close to 10,28,8/3 there is a RobustTransitive Attractor containing a singularity (equilibrium point).
Presences of singularity prevents the hyperbolicity
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 16 / 29
-
different backgrounds...
Geometric Lorenz attractors
Geometric models of robust transitive attractor with singularities(Guckenheimer-Williams).
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 17 / 29
-
different backgrounds...
Geometric Lorenz attractors
Geometric models of robust transitive attractor with singularities(Guckenheimer-Williams).
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 17 / 29
-
different backgrounds...
Geometric Lorenz attractors
Geometric models of robust transitive attractor with singularities(Guckenheimer-Williams).
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 17 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:
1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;
2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Singular Hyperbolicity
Structure underlying the GLA
TΛ = Es ⊕ Ecu,
Rich dynamic obtained from Singular hyperbolicity:1 Density of periodic orbits/ chaoticity;2 Good statistical properties.
Lorenz’s equation is a Geometric Lorenz Attractor
Any C1−robust attractor with singularitiesis a Geometric Lorenz Attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 18 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES
WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;
good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Robustness implies structure.
Can we characterize robust dynamics which are not hyperbolic
ROBUSTNESS IMPLIES WEAK HYPERBOLICITY.
NICE DYNAMICAL PROPERTIES (sometimes under extra assumptions)
Abundance of periodic trajectories;good statistical properties.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 19 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Perturbations of Integrable systems
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Everything is ”Robust”?
NO. WILD DYNAMICS.
Infinitely many attractors apearing and dissapearing
Perturbations of Integrable systems
New kind of homoclinic pointsEnrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 20 / 29
-
different backgrounds...
Homoclinic points: Wild dynamics
Homoclinic points:
Hyperbolicity=Transversal homoclinic points.
Breaking Hyperbolicity =Tangent homoclinic points.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 21 / 29
-
different backgrounds...
Homoclinic points: Wild dynamics
Homoclinic points:
Hyperbolicity=Transversal homoclinic points.
Breaking Hyperbolicity =Tangent homoclinic points.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 21 / 29
-
different backgrounds...
Homoclinic points: Wild dynamics
Homoclinic points:
Hyperbolicity=Transversal homoclinic points.
Breaking Hyperbolicity =Tangent homoclinic points.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 21 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —>
a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —>
infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...
TANGENCIES IMPLY WILD SETS
Newhouse: Unfolding homoclinic tangencies
Residual sets of diffeos having infinitely many periodic attractors.
One tangency —> a cascade of infinitely many tangencies —> infinitelymany periodic attractor.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 22 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 23 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics
also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
GENERIC DYNAMICS/UNIVERSAL MECHANISMS
Coming back to the possible dynamical scenario:
Robust dynamics also called Tame dynamics
Wild dynamics
How can we explain those dynamical behaviors?
Dictionary?
Phenomenas/Mechanisms
Phenomena: Some well described dynamical behavior
Mechanisms: Some dynamical configuration and its perturbations.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 24 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
UNIVERSAL MECHANISMS/GENERIC DYNAMICS
PHENOMENA MECHANISMS
The collection of phenomenas has to be generic
The collection of mechanisms has to be simply and generic
Rich in their consequences
“HOMOCLINIC BIFURCATIONS should be the MECHANISMS”
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 25 / 29
-
different backgrounds...
Dichotomy in low dimension.
Dynamical dichotomy for low dimension:
Robust Dynamics = Hyperbolic systems
Wild dynamic “=” homoclinic tangencies.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 26 / 29
-
different backgrounds...
Dichotomy in low dimension.
Dynamical dichotomy for low dimension:
Robust Dynamics = Hyperbolic systems
Wild dynamic “=” homoclinic tangencies.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 26 / 29
-
different backgrounds...
Dichotomy in low dimension.
Dynamical dichotomy for low dimension:
Robust Dynamics = Hyperbolic systems
Wild dynamic “=” homoclinic tangencies.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 26 / 29
-
different backgrounds...
Dichotomy in low dimension.
Dynamical dichotomy for low dimension:
Robust Dynamics = Hyperbolic systems
Wild dynamic “=” homoclinic tangencies.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 26 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
What about higher dimensions?
The situation changes dramatically!!
The ZOO (phenomenas) is becomes larger.
There are Robust chaotic dynamics which are NOT hyperbolic.
New type of wild dynamics.
New Mechanisms/Homoclinic bifurcations get into the picture.
Heterodimensional cycle.
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 27 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dichotomies in any dimen?
There is reasonable (vague), almost generic list of phenomenas.
There is reasonable list of mechanisms.
Some relation between New phenomenas/New mechanisms
Incomplete dictionary
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 28 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dichotomies in any dimen?
There is reasonable (vague), almost generic list of phenomenas.
There is reasonable list of mechanisms.
Some relation between New phenomenas/New mechanisms
Incomplete dictionary
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 28 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dichotomies in any dimen?
There is reasonable (vague), almost generic list of phenomenas.
There is reasonable list of mechanisms.
Some relation between New phenomenas/New mechanisms
Incomplete dictionary
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 28 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dichotomies in any dimen?
There is reasonable (vague), almost generic list of phenomenas.
There is reasonable list of mechanisms.
Some relation between New phenomenas/New mechanisms
Incomplete dictionary
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 28 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dichotomies in any dimen?
There is reasonable (vague), almost generic list of phenomenas.
There is reasonable list of mechanisms.
Some relation between New phenomenas/New mechanisms
Incomplete dictionary
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 28 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dictionari in any dimen?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 29 / 29
-
different backgrounds...
Phenom.Mechanisms/ Dictionari in any dimen?
Enrique R. Pujals (IMPA) Dynamical Systems SIAM 2011 29 / 29