
e1 WS16 v20 - Fakultät für Physik - LMU München · Alle Informationen zur Vorlesung unter :...
31
Experimentalphysik E1 http:// www.physik.lmu.de /lehre/ vorlesungen / index.html Alle Informationen zur Vorlesung unter : Elastizitätslehre 13. Jan. 2016
Transcript of e1 WS16 v20 - Fakultät für Physik - LMU München · Alle Informationen zur Vorlesung unter :...
Experimentalphysik E1
http://www.physik.lmu.de/lehre/vorlesungen/index.html Alle Informationen zur Vorlesung unter :
Elastizitätslehre
13. Jan. 2016
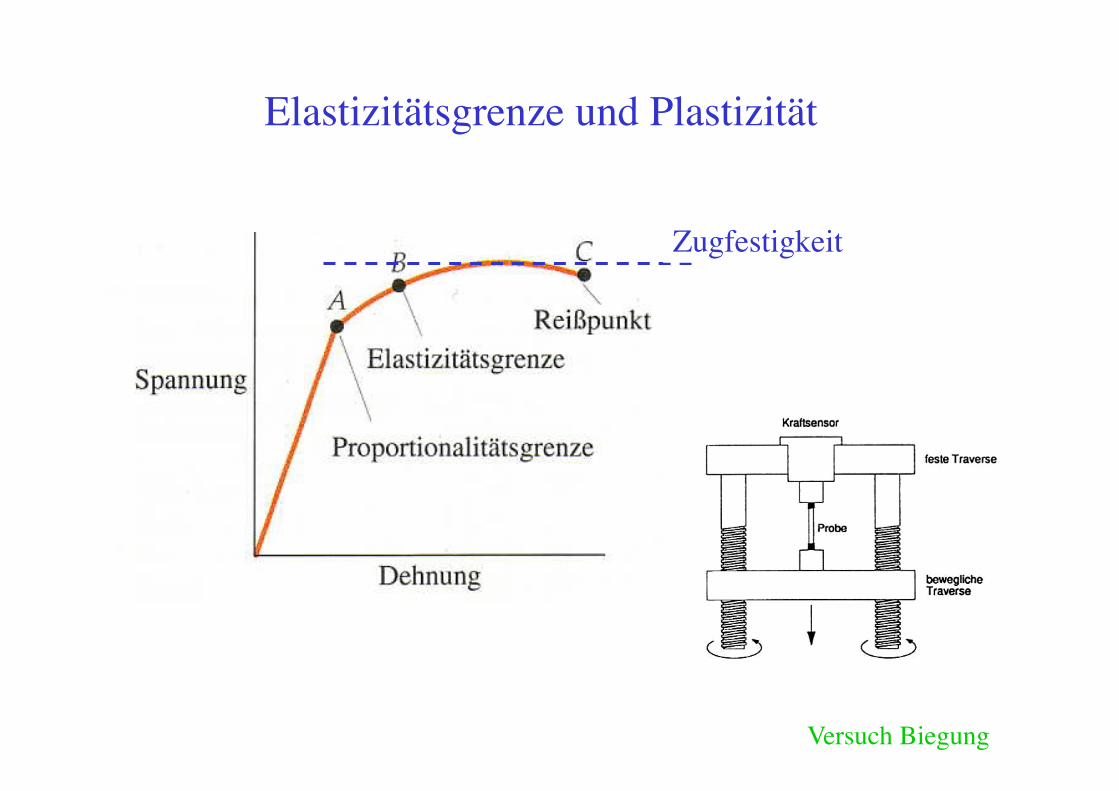
Elastizitätsgrenze und Plastizität
Zugfestigkeit
Versuch Biegung
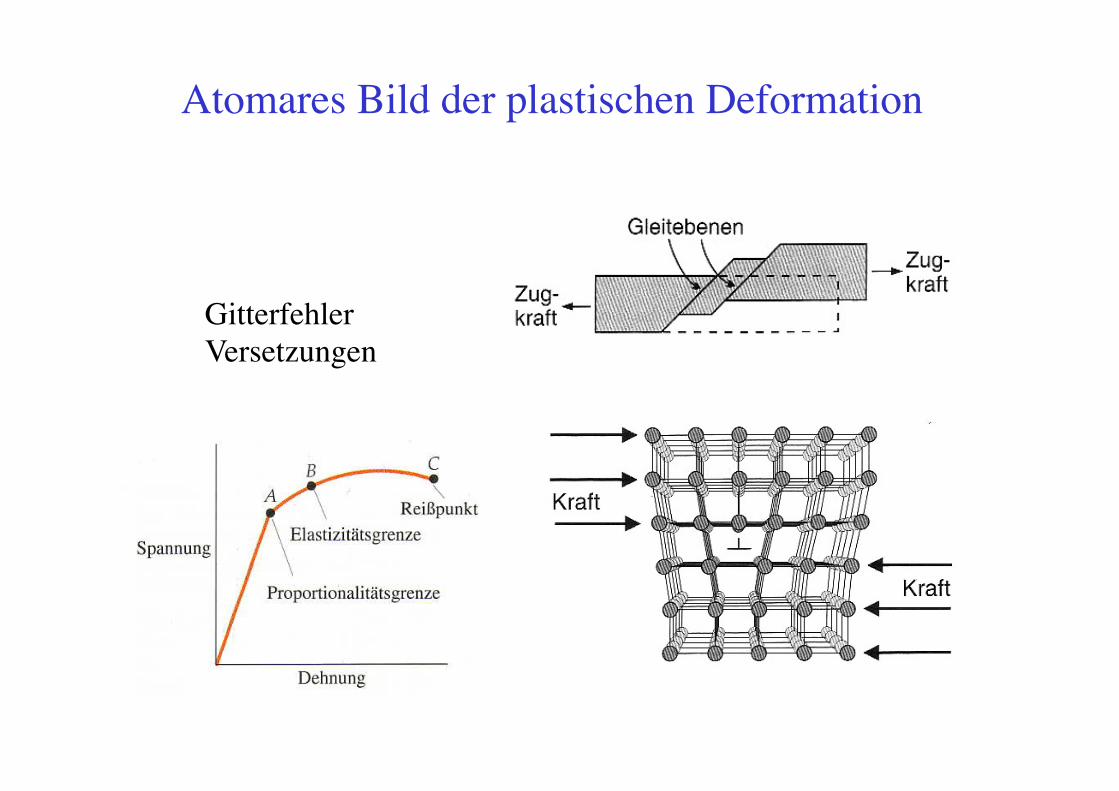
Atomares Bild der plastischen Deformation
GitterfehlerVersetzungen
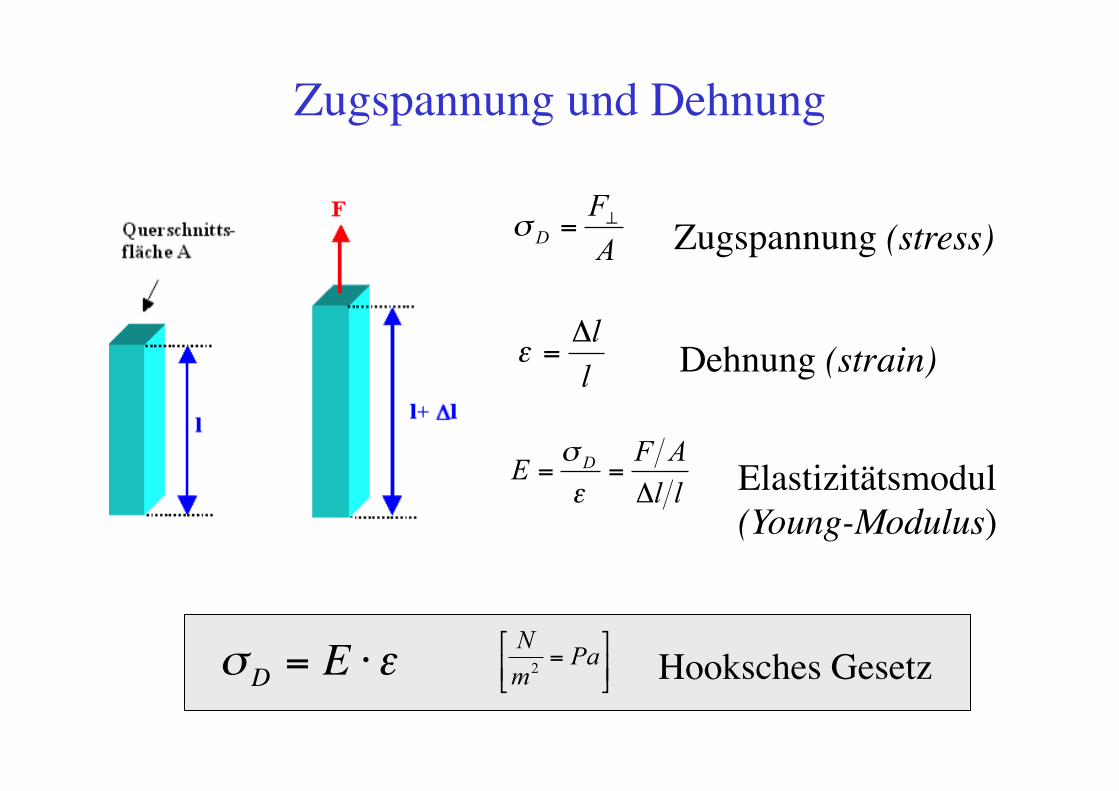
Zugspannung und Dehnung
AF
D⊥=σ
llΔ
=ε
Zugspannung (stress)
Dehnung (strain)
Elastizitätsmodul(Young-Modulus)
llAFE D
Δ==
εσ
!"
#$%
& = PamN2
€
σD = E ⋅ ε Hooksches Gesetz
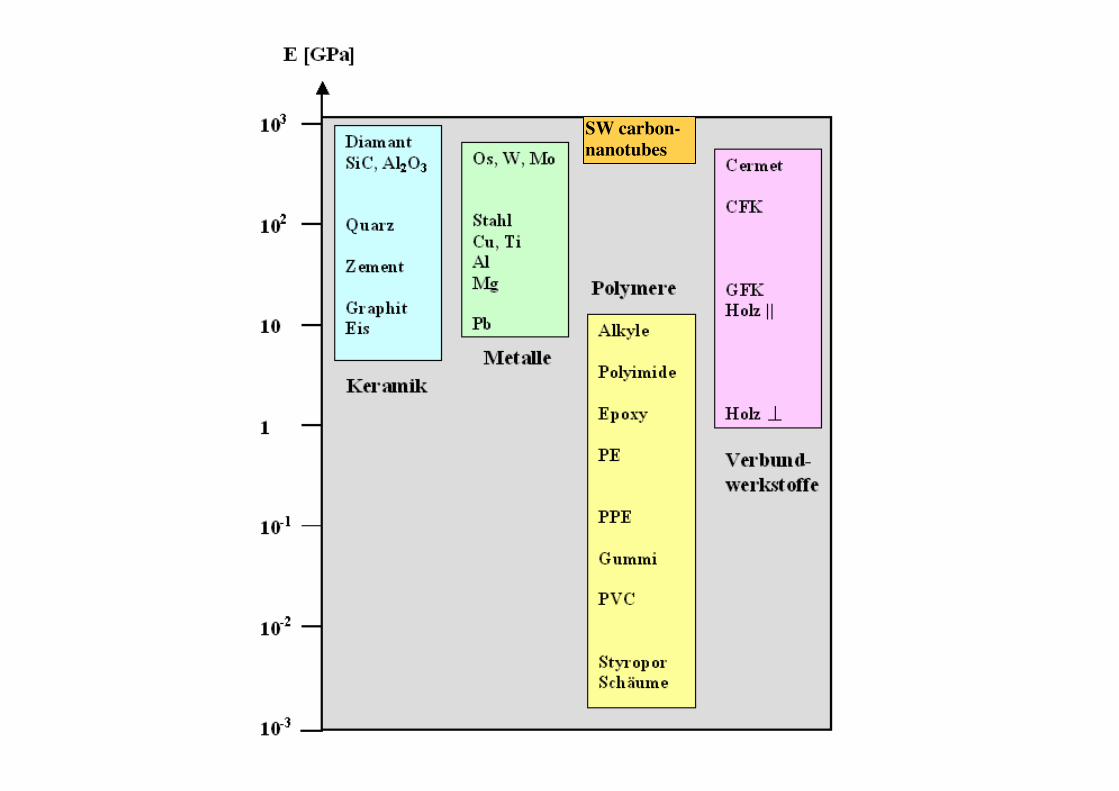
SW carbon-nanotubes
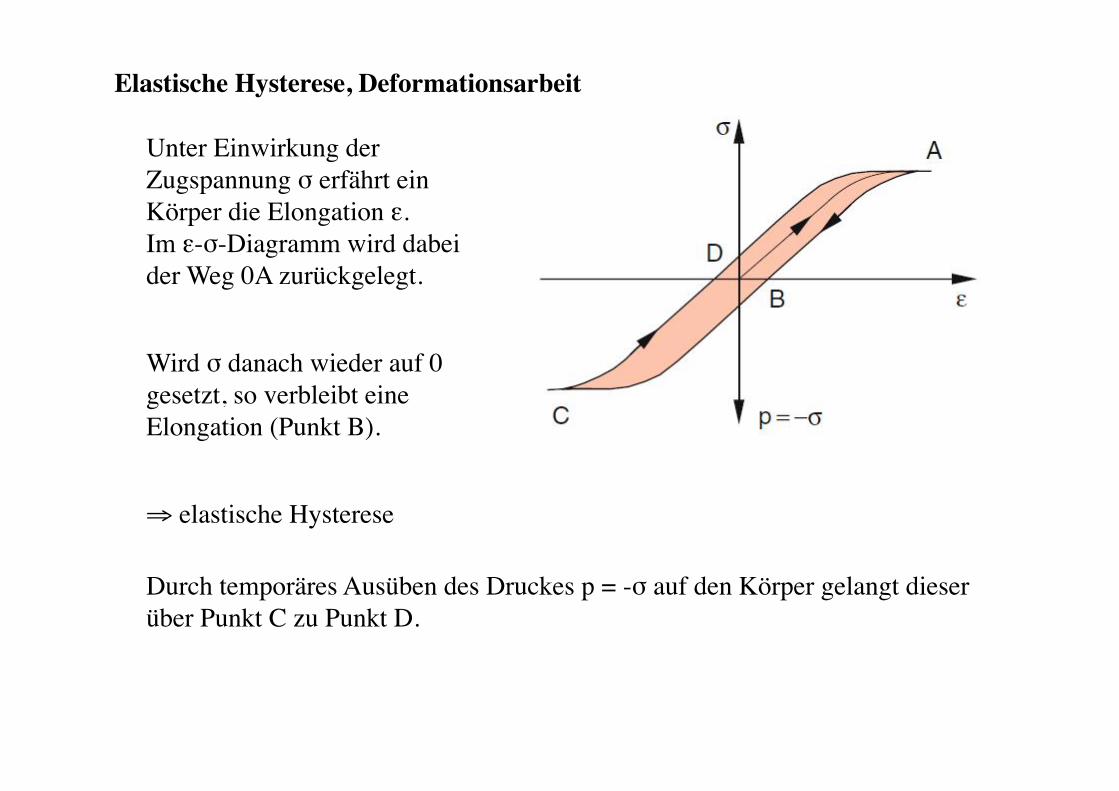
Elastische Hysterese, Deformationsarbeit
Unter Einwirkung der Zugspannung σ erfährt ein Körper die Elongation ε.Im ε-σ-Diagramm wird dabei der Weg 0A zurückgelegt.
Wird σ danach wieder auf 0 gesetzt, so verbleibt eine Elongation (Punkt B).
⇒ elastische Hysterese
Durch temporäres Ausüben des Druckes p = -σ auf den Körper gelangt dieser über Punkt C zu Punkt D.
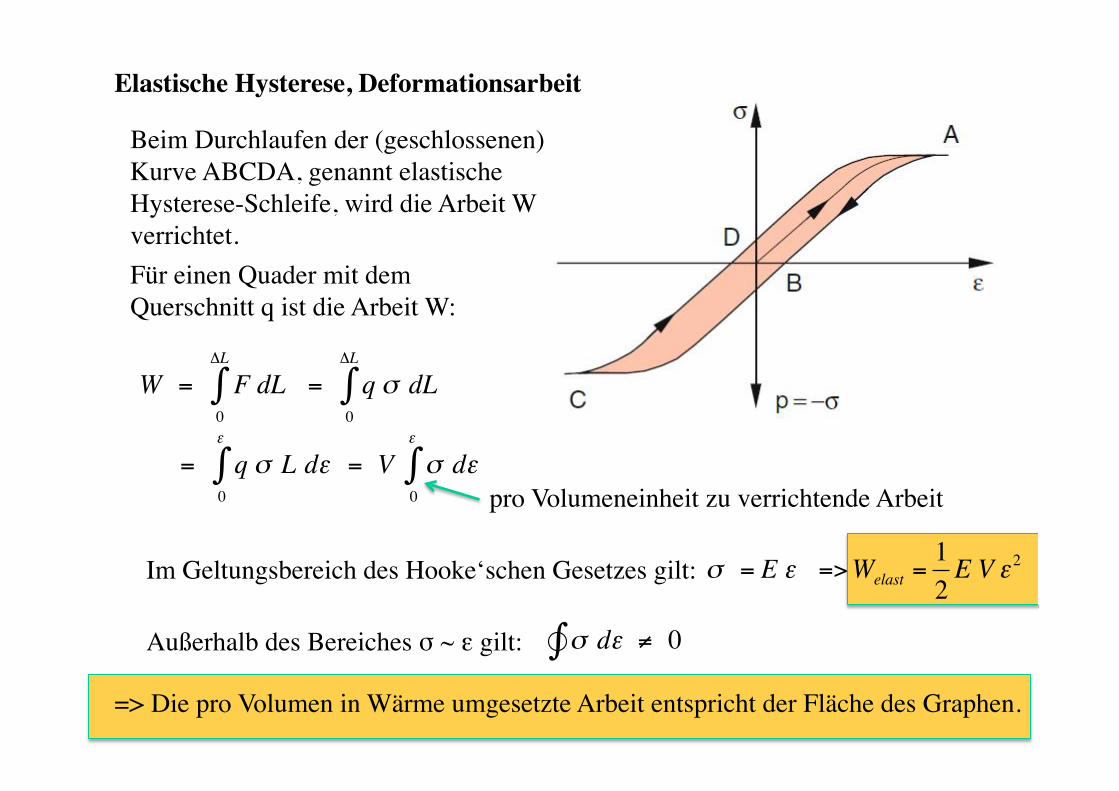
Elastische Hysterese, Deformationsarbeit
Beim Durchlaufen der (geschlossenen) Kurve ABCDA, genannt elastische Hysterese-Schleife, wird die Arbeit W verrichtet.Für einen Quader mit dem Querschnitt q ist die Arbeit W:
€
W = F dL0
ΔL
∫
€
= q σ dL0
ΔL
∫
€
= q σ L dε0
ε
∫
€
= V σ dε0
ε
∫
Im Geltungsbereich des Hooke‘schen Gesetzes gilt:
€
σ = E ε
€
=>Welast =12E V ε2
Außerhalb des Bereiches σ ~ ε gilt:
€
σ dε∫ ≠ 0
pro Volumeneinheit zu verrichtende Arbeit
=> Die pro Volumen in Wärme umgesetzte Arbeit entspricht der Fläche des Graphen.
L
d - Δd
L + ΔL
d
δ
€
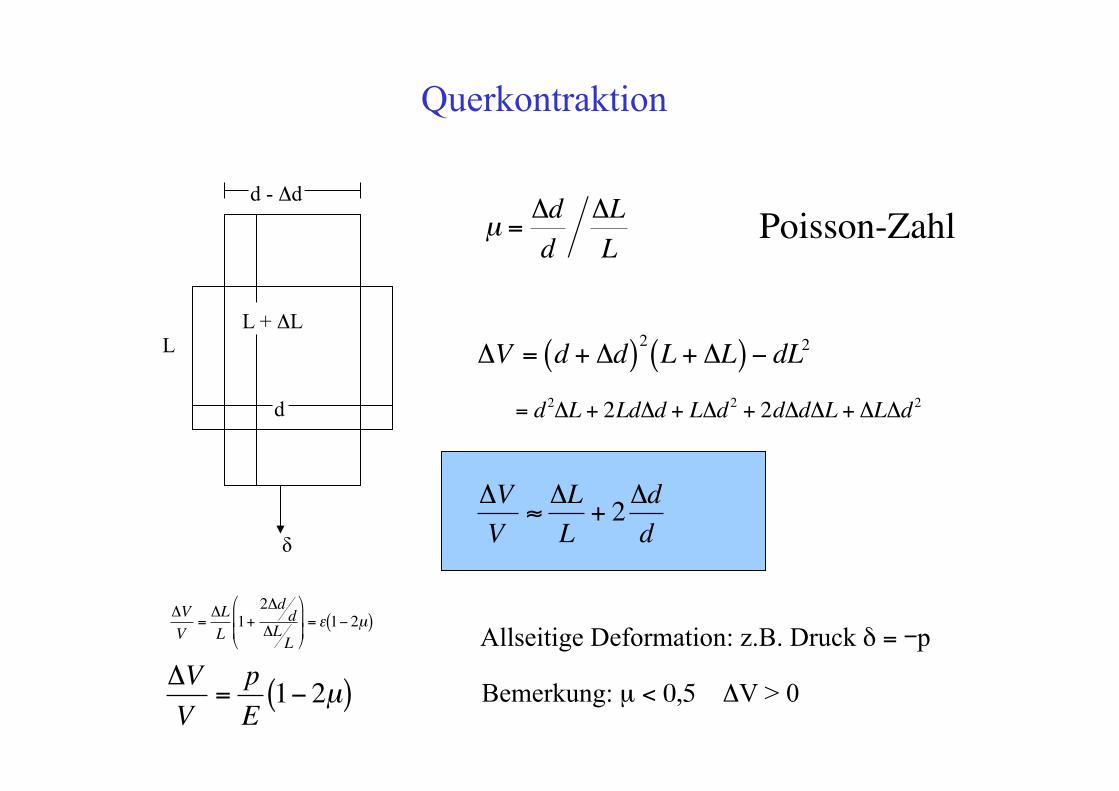
ΔV = d + Δd( )2 L + ΔL( ) − dL2
€
= d2ΔL + 2LdΔd + LΔd2 + 2dΔdΔL + ΔLΔd2
€
ΔVV
≈ΔLL
+ 2Δdd
Querkontraktion
€
µ =Δdd
ΔLL
Poisson-Zahl
Bemerkung: µ < 0,5 ΔV > 0
Allseitige Deformation: z.B. Druck δ = -p
€
ΔVV
=ΔLL1+2Δd
dΔL
L
#
$
% %
&
'
( ( = ε 1− 2µ( )
€
ΔVV
=pE1− 2µ( )
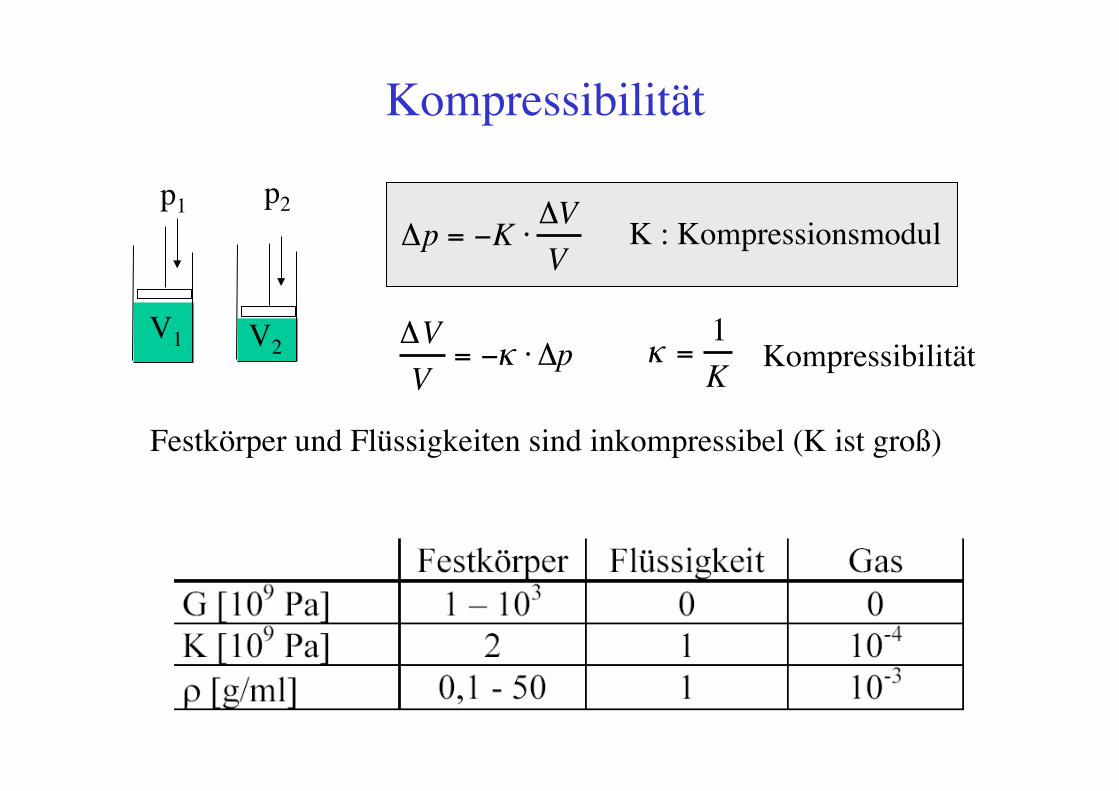
Kompressibilität
p1
V1
p2
V2
Δp = −K ⋅ΔVV
K : Kompressionsmodul
ΔVV
= −κ ⋅ Δp κ =1K Kompressibilität
Festkörper und Flüssigkeiten sind inkompressibel (K ist groß)
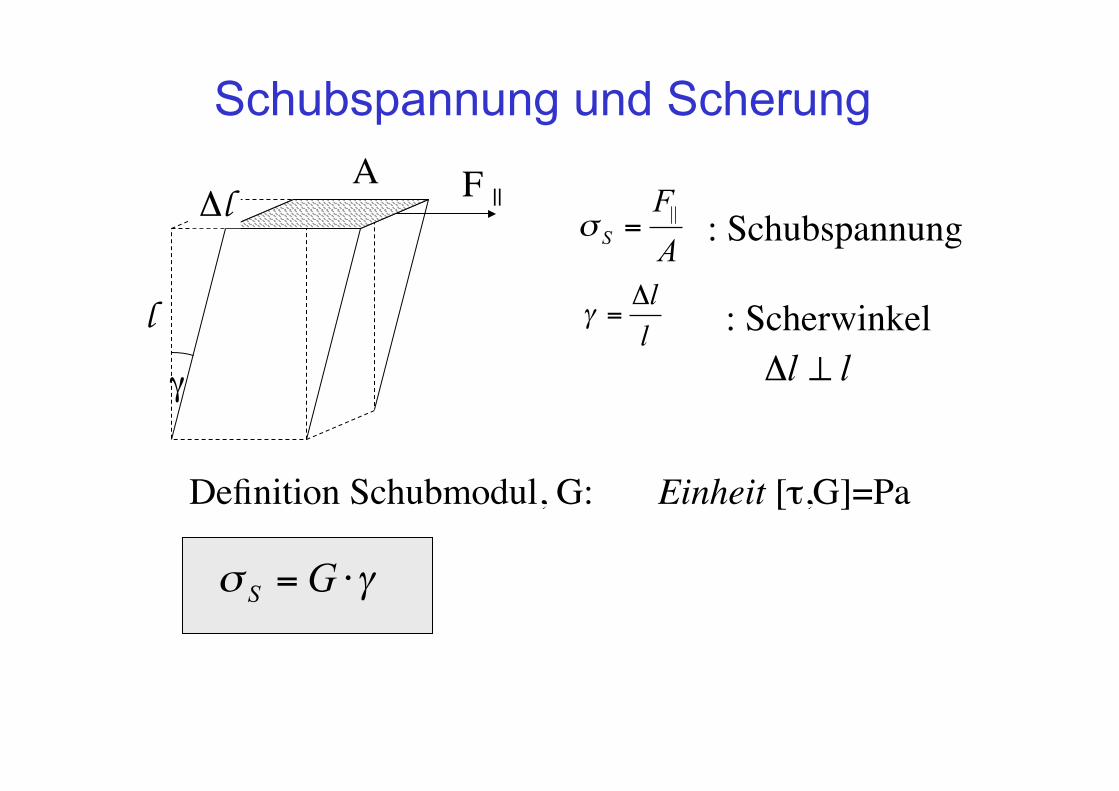
F ||A
γ
γσ ⋅=GS
: Schubspannung
Definition Schubmodul, G: Einheit [τ,G]=Pa
Schubspannung und Scherung
AF
S||=σ
: Scherwinkell
Δl
llΔ
=γ
ll ⊥Δ
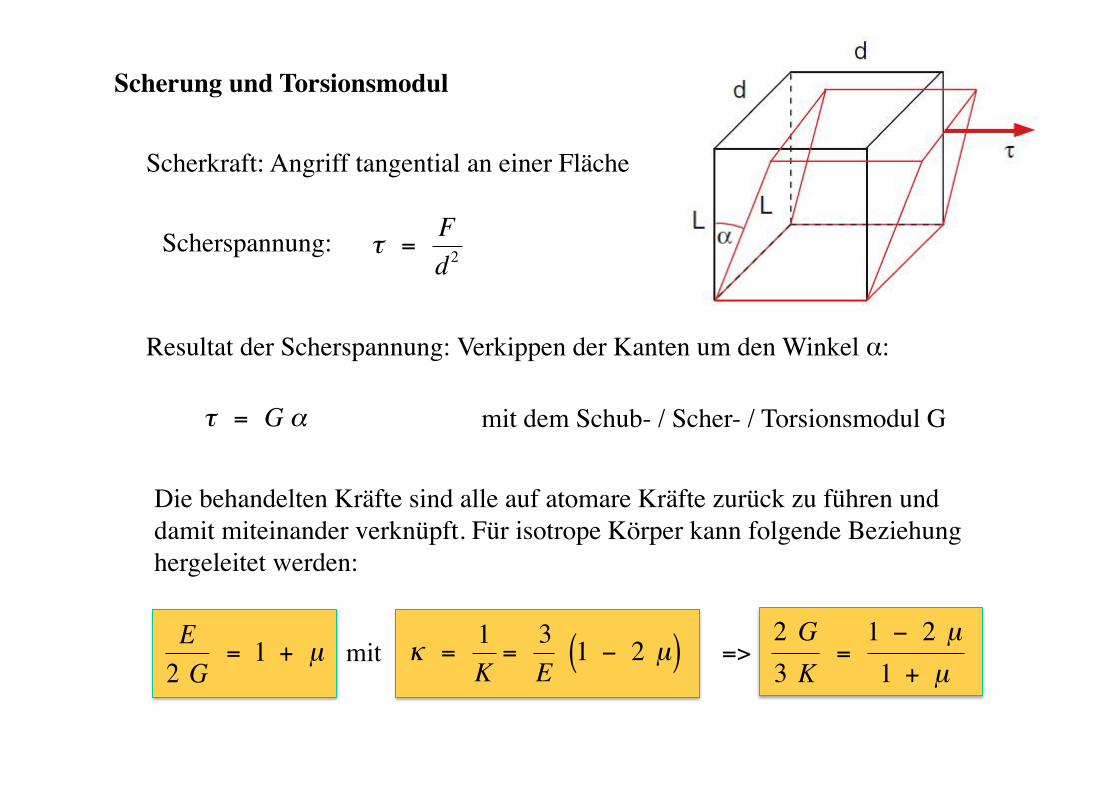
Scherkraft: Angriff tangential an einer Fläche
Scherung und Torsionsmodul
€
τ =Fd2
Scherspannung:
Resultat der Scherspannung: Verkippen der Kanten um den Winkel α:
€
τ = G α mit dem Schub- / Scher- / Torsionsmodul G
Die behandelten Kräfte sind alle auf atomare Kräfte zurück zu führen und damit miteinander verknüpft. Für isotrope Körper kann folgende Beziehung hergeleitet werden:
€
E2 G
= 1 + µ
€
=>2 G3 K
=1 − 2 µ
1 + µ
€
κ =1K
=3E
1 − 2 µ( )mit
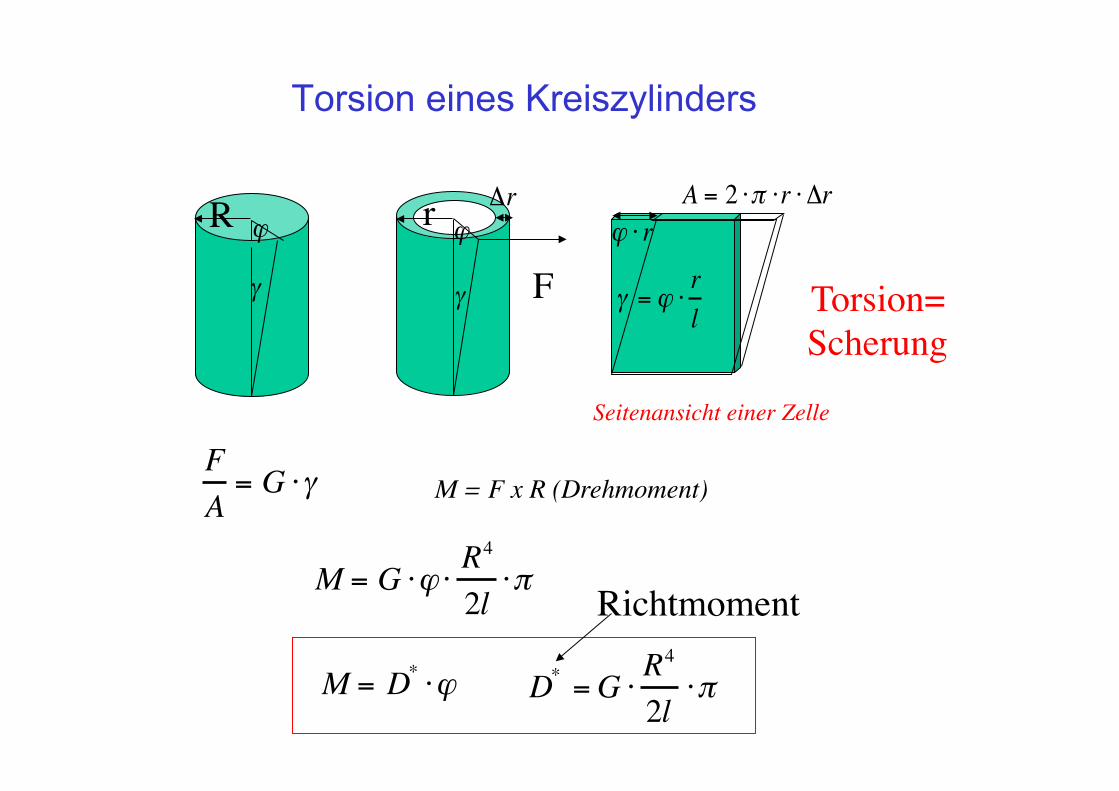
ϕR r ϕ
γ
A = 2 ⋅π ⋅r ⋅ ΔrΔr
γ = ϕ ⋅rl
γ
ϕ ⋅ r
F
FA= G ⋅γ
M = G ⋅ϕ ⋅R4
2l⋅π
M = D* ⋅ϕ D* =G ⋅R4
2l⋅π
Richtmoment
Seitenansicht einer Zelle
Torsion eines Kreiszylinders
M = F x R (Drehmoment)
Torsion=Scherung
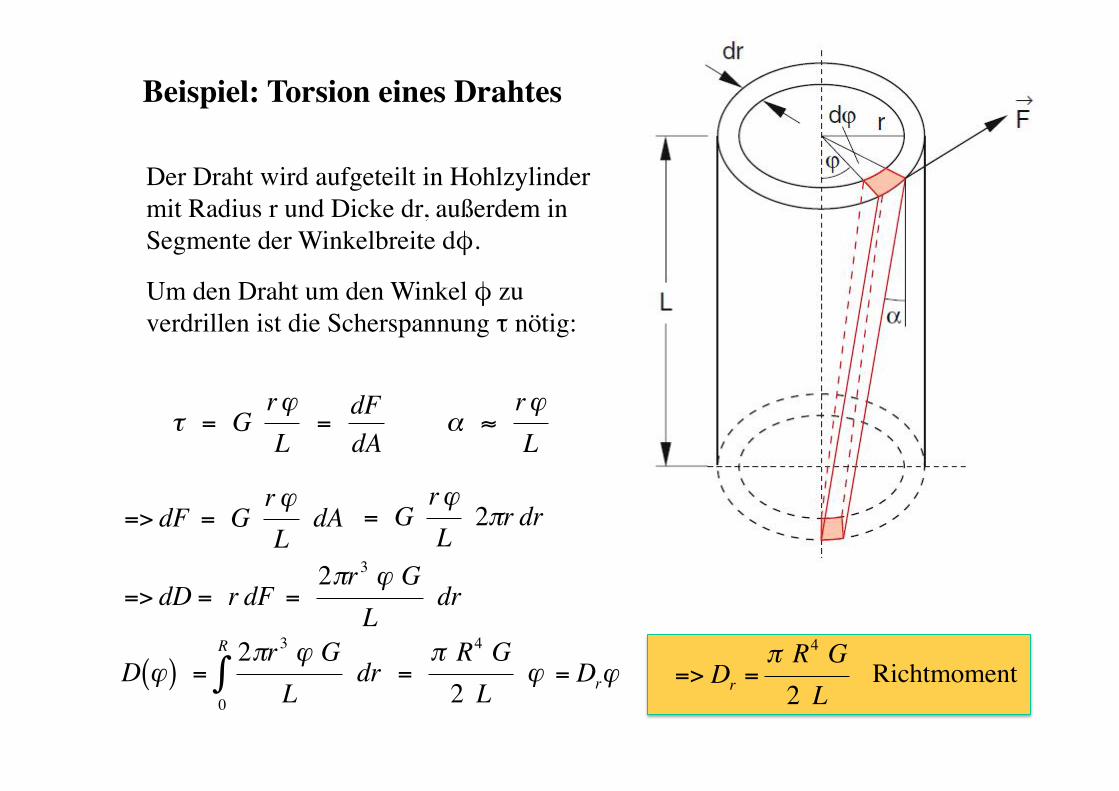
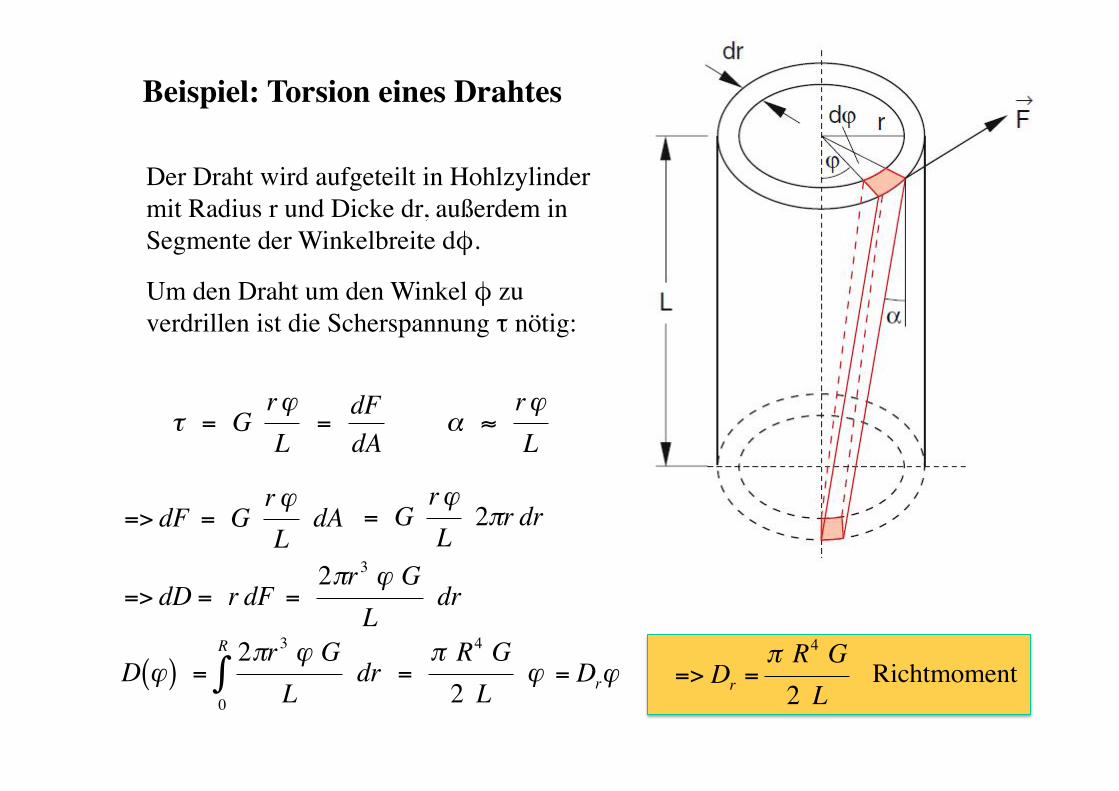
Der Draht wird aufgeteilt in Hohlzylinder mit Radius r und Dicke dr, außerdem in Segmente der Winkelbreite dφ.
Beispiel: Torsion eines Drahtes
Um den Draht um den Winkel φ zu verdrillen ist die Scherspannung τ nötig:
€
τ = GrϕL
=dFdA
€
α ≈rϕL
€
= GrϕL2πr dr
€
=> dF = GrϕL
dA
€
=> dD = r dF =2πr 3 ϕ G
Ldr
€
D ϕ( ) =2πr 3 ϕ G
Ldr
0
R
∫ =π R4 G2 L
ϕ
€
= Drϕ
€
=> Dr =π R4 G2 L
Richtmoment
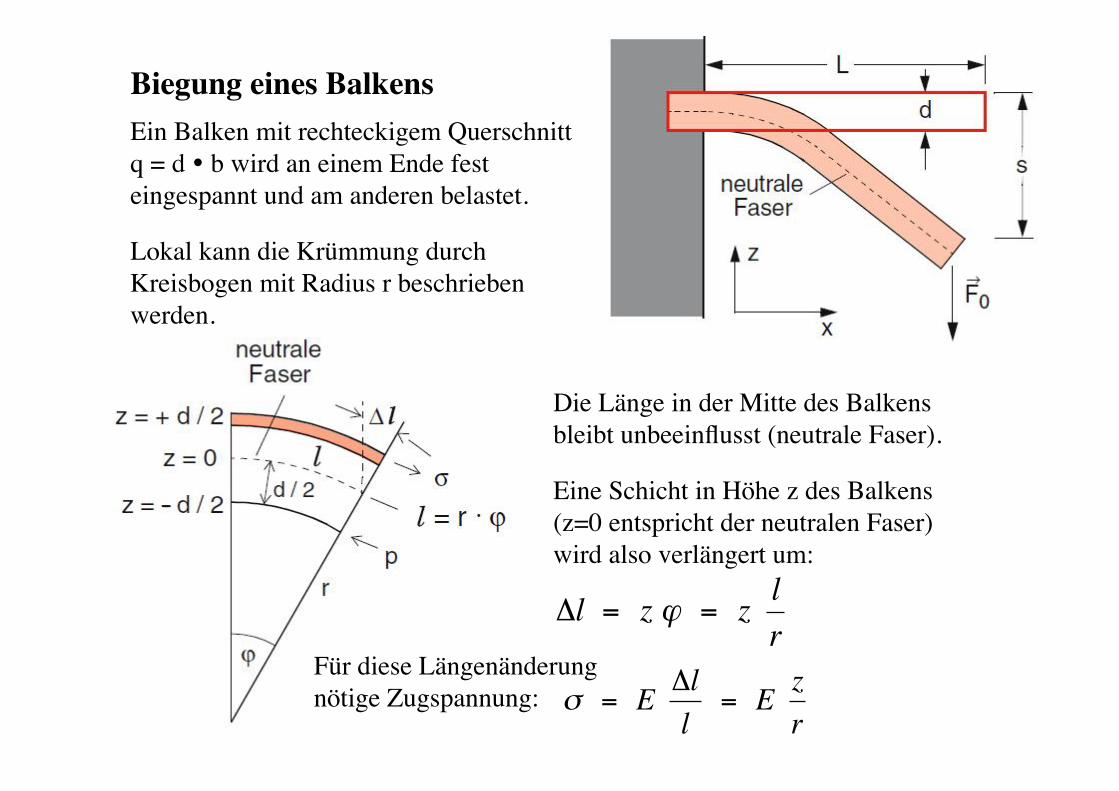
Biegung eines BalkensEin Balken mit rechteckigem Querschnitt q = d b wird an einem Ende fest eingespannt und am anderen belastet.
Lokal kann die Krümmung durch Kreisbogen mit Radius r beschrieben werden.
Die Länge in der Mitte des Balkens bleibt unbeeinflusst (neutrale Faser).
Eine Schicht in Höhe z des Balkens (z=0 entspricht der neutralen Faser) wird also verlängert um:
€
Δl = z ϕ = z lr
Für diese Längenänderung nötige Zugspannung:
€
σ = E Δll
= E zr
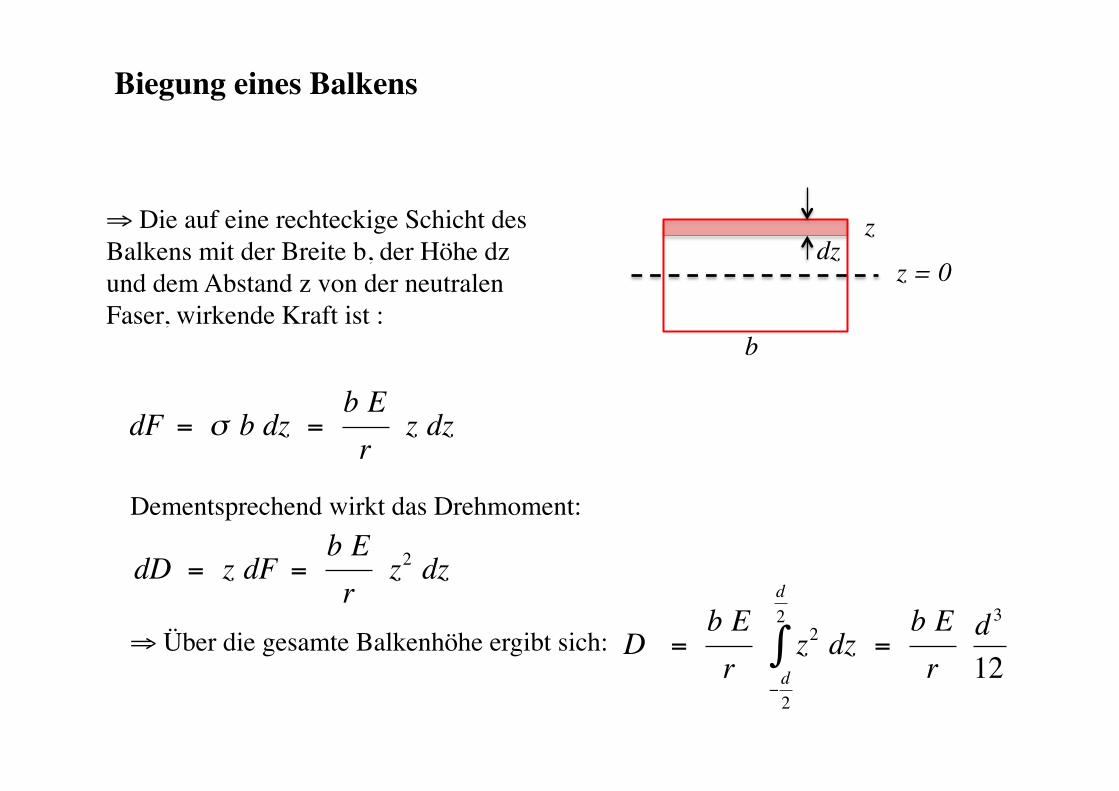
Biegung eines Balkens
⇒ Die auf eine rechteckige Schicht des Balkens mit der Breite b, der Höhe dz und dem Abstand z von der neutralen Faser, wirkende Kraft ist :
€
dF = σ b dz =b Er
z dz
Dementsprechend wirkt das Drehmoment:
€
dD = z dF =b Er
z2 dz
⇒ Über die gesamte Balkenhöhe ergibt sich:
€
D =b Er
z2 dz−d2
d2
∫ =b Er
d 3
12
dzz = 0
b
z
Biegung eines Balkens
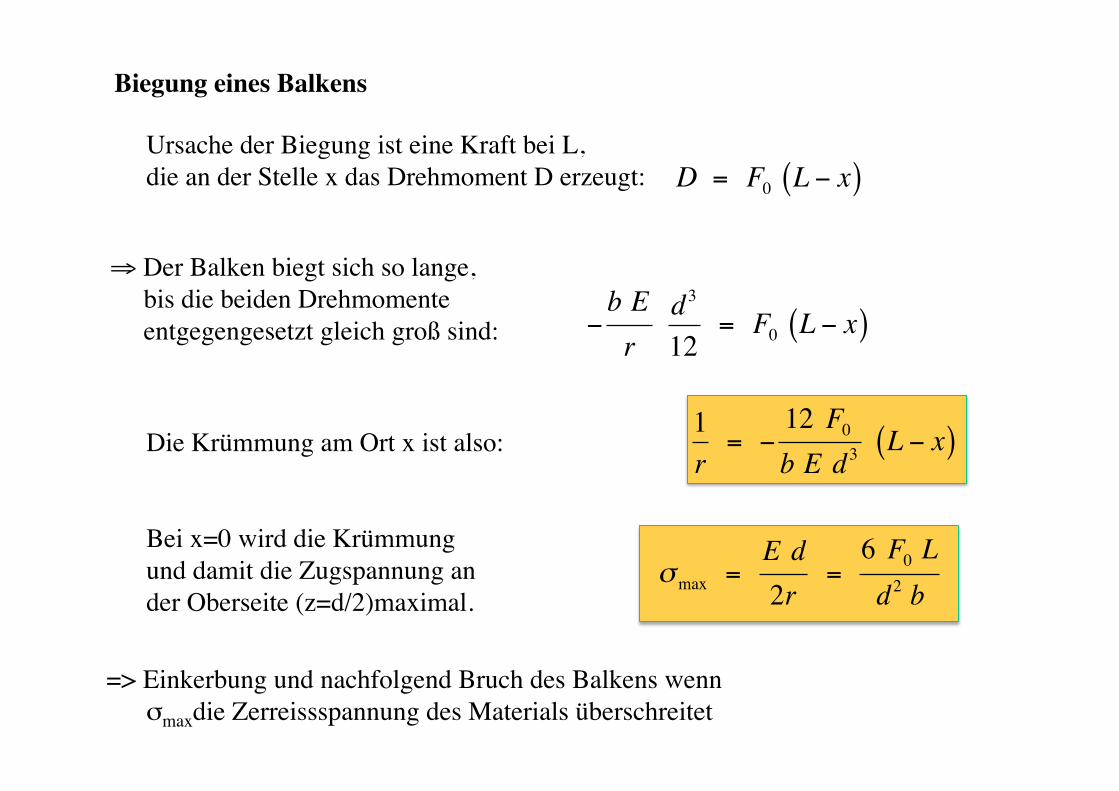
Ursache der Biegung ist eine Kraft bei L, die an der Stelle x das Drehmoment D erzeugt:
€
D = F0 L − x( )
⇒ Der Balken biegt sich so lange, bis die beiden Drehmomente entgegengesetzt gleich groß sind:
€
−b Er
d3
12= F0 L − x( )
Die Krümmung am Ort x ist also:
€
1r
= −12 F0b E d3
L − x( )
Bei x=0 wird die Krümmung und damit die Zugspannung an der Oberseite (z=d/2)maximal.
€
σmax =E d2r
=6 F0 Ld2 b
=> Einkerbung und nachfolgend Bruch des Balkens wenn σmaxdie Zerreissspannung des Materials überschreitet
Biegung eines Balkens
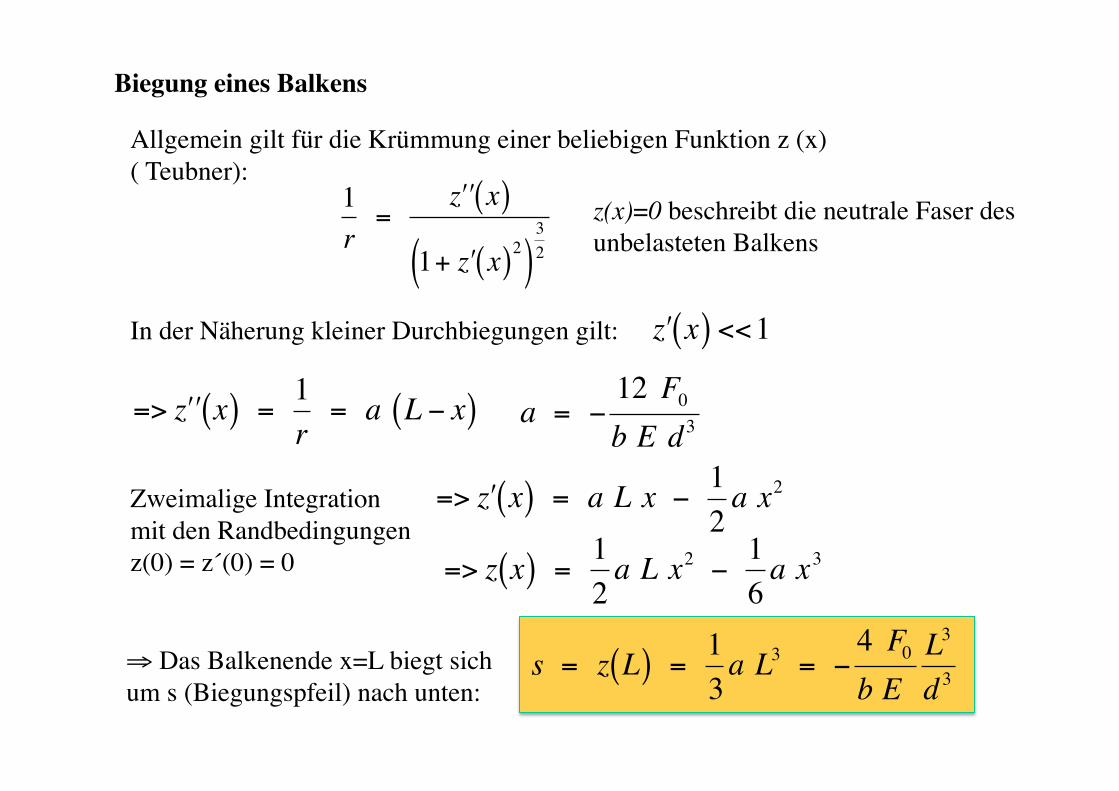
In der Näherung kleiner Durchbiegungen gilt:
€
z" x( ) <<1
€
a = −12 F0b E d3
€
=> z"" x( ) =1r
= a L − x( )
Zweimalige Integrationmit den Randbedingungen z(0) = z´(0) = 0
€
=> z" x( ) = a L x −12a x2
⇒ Das Balkenende x=L biegt sich um s (Biegungspfeil) nach unten:
€
s = z L( ) =13a L3 = −
4 F0b E
L3
d 3€
=> z x( ) =12a L x2 − 1
6a x3
Allgemein gilt für die Krümmung einer beliebigen Funktion z (x) ( Teubner):
€
1r
=z"" x( )
1+ z" x( )2( )32
z(x)=0 beschreibt die neutrale Faser des unbelasteten Balkens
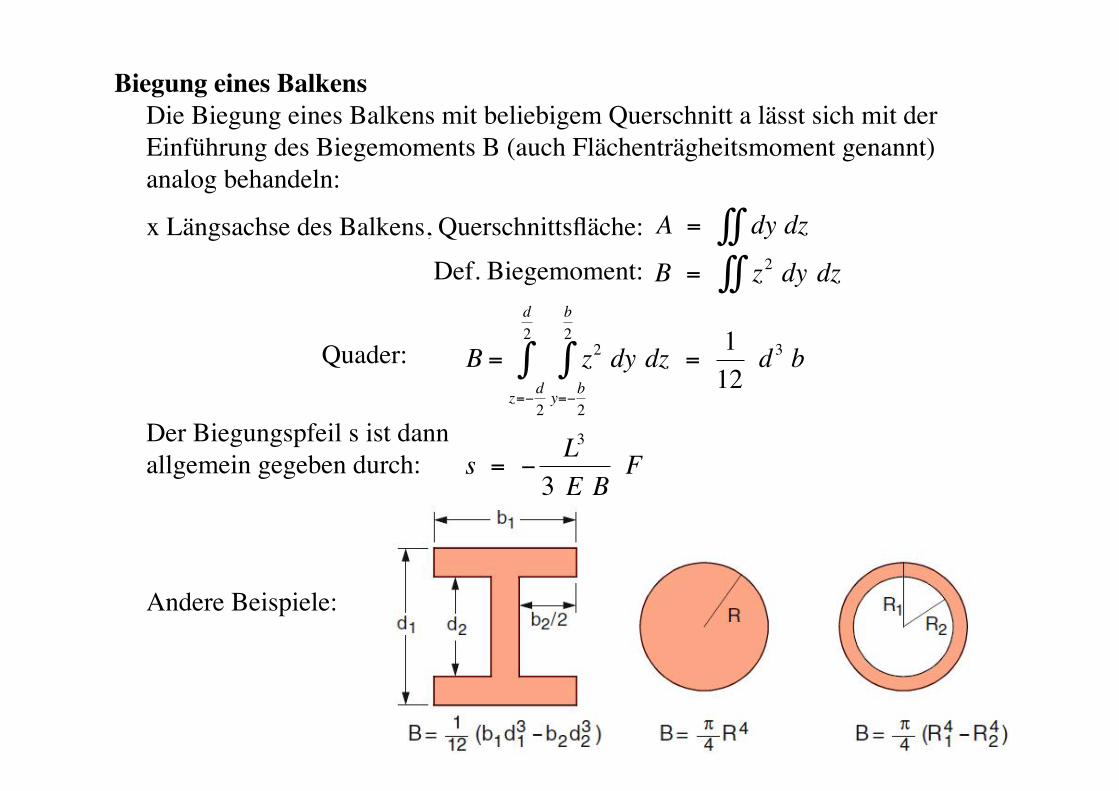
Biegung eines BalkensDie Biegung eines Balkens mit beliebigem Querschnitt a lässt sich mit der Einführung des Biegemoments B (auch Flächenträgheitsmoment genannt)analog behandeln:
Quader: €
A = dy dz∫∫
€
B = z2 dy dz∫∫
€
B = z2 dyy=−b
2
b2
∫ dzz=−d
2
d2
∫ =112
d 3 b
Der Biegungspfeil s ist dann allgemein gegeben durch:
€
s = −L3
3 E BF
Andere Beispiele:
Def. Biegemoment: x Längsachse des Balkens, Querschnittsfläche:
€
s = −4L3
E ⋅ a3 ⋅ b⋅ Fa
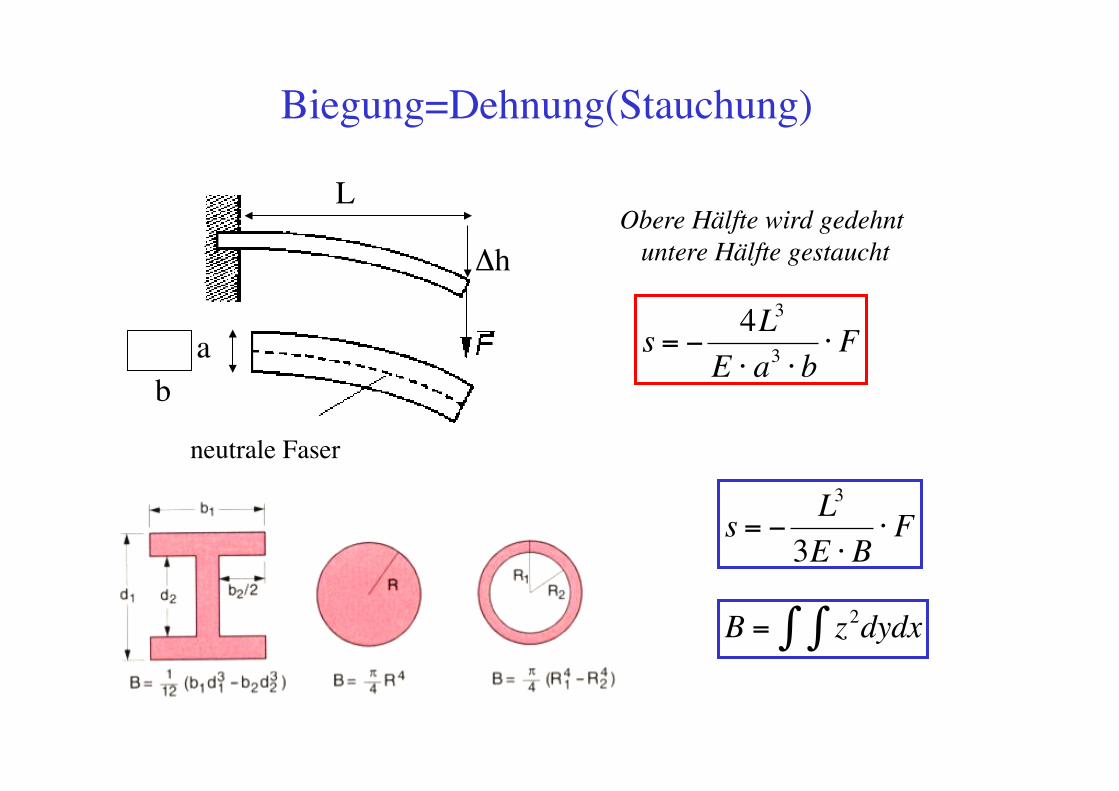
b
L
neutrale Faser
ΔhObere Hälfte wird gedehnt
untere Hälfte gestaucht
Biegung=Dehnung(Stauchung)
€
s = −L3
3E ⋅ B⋅ F
€
B = z2∫∫ dydx
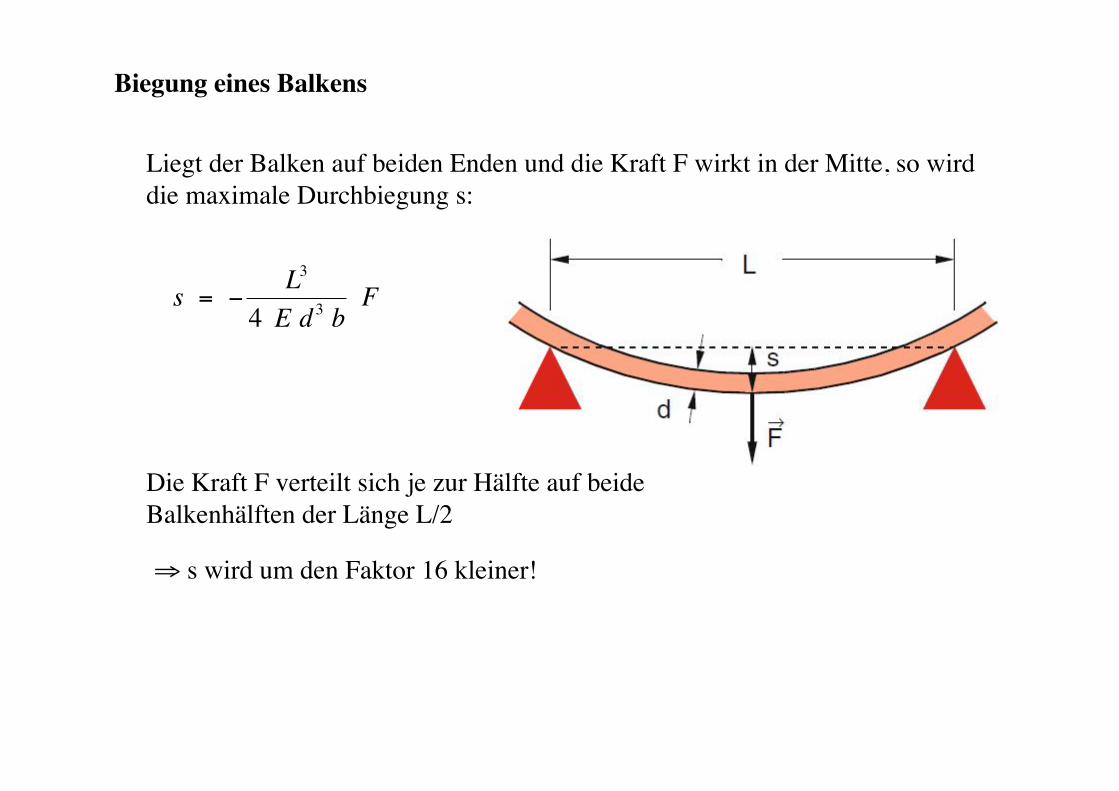
Biegung eines Balkens
Liegt der Balken auf beiden Enden und die Kraft F wirkt in der Mitte, so wird die maximale Durchbiegung s:
€
s = −L3
4 E d 3 bF
Die Kraft F verteilt sich je zur Hälfte auf beide Balkenhälften der Länge L/2
⇒ s wird um den Faktor 16 kleiner!
Der Draht wird aufgeteilt in Hohlzylinder mit Radius r und Dicke dr, außerdem in Segmente der Winkelbreite dφ.
Beispiel: Torsion eines Drahtes
Um den Draht um den Winkel φ zu verdrillen ist die Scherspannung τ nötig:
€
τ = GrϕL
=dFdA
€
α ≈rϕL
€
= GrϕL2πr dr
€
=> dF = GrϕL
dA
€
=> dD = r dF =2πr 3 ϕ G
Ldr
€
D ϕ( ) =2πr 3 ϕ G
Ldr
0
R
∫ =π R4 G2 L
ϕ
€
= Drϕ
€
=> Dr =π R4 G2 L
Richtmoment
Seite 2 von 4 M5.DOC
Bringt man an der Feder die Masse m an, lenkt diese aus und überlässt sie dann der Federkraft, so lautet das dynamische Grundgesetz
xkFxm −== F bzw. 020 =+=+ xxx
mk
x ω , ( 2 – 5 ) , ( 2 – 6 )
d. h. die Masse m vollführt eine harmonische Schwingung mit der Kreisfrequenz
mk=0ω . ( 2 – 7 )
Nach ( 2 – 1 ) kann die Federkonstante statisch und nach ( 2 – 7 ) dynamisch bestimmt werden. Die Längenänderung x der Feder bei Einwirkung der Kraft F ist - wie bereits erwähnt - auf die Torsion des Feder-drahtes zurückzuführen. Die Feder bestehe aus n Windungen. Der Federdraht habe einen Kreisquerschnitt vom Durchmesser 2 r0 . Der Windungsdurchmesser 2 R wird zwischen den Mittelpunkten dieser Kreisquerschnitte angegeben. Die Kraft F bewirkt am Federende das Torsionsmoment M = F R (vgl. Bild 2). Infolgedessen wird pro Windung der Drahtquerschnitt um einen kleinen Winkel ∆ϕ verdreht und jede Windung um ein kleines Stück ∆x = R ∆ϕ verlängert, bis das dadurch im Draht hervorgerufene Schubspannungsmoment das Gleichgewicht herstellt. Für alle n Windungen zusammen erhält man die Verdrehung ϕ = n ∆ϕ und die Verlängerung x = n ∆x = R n ∆ϕ = R ϕ . Mit dem Schubspannungsmoment MS für einen Draht der Länge l und des Durchmessers 2 r0 aus einem Material mit dem Schubmodul G gilt im Gleichgewicht
RFMMl
rG===
πS
40
2ϕ . ( 2 – 8 )
(Zur Herleitung sei auf den Anhang 2a verwiesen.)
Führt man in ( 2 – 8 ) für F = k x , für Rx=ϕ und für die Drahtlänge (genähert) l = 2π R n ein, so folgt daraus für
k bzw. G
3
40
4 Rn
rGk = bzw.
40
3
r
kRn4G = . ( 2 – 9 ) , ( 2 – 10 )
2a Anhang (fakultativ, soweit nicht anders festgelegt) Die als Torsion bezeichnete Verdrehung eines elastischen Körpers soll am Beispiel eines Kreiszylinders (Draht) untersucht werden. In Bild 2 ist der Querschnitt B fest eingespannt und am anderen Ende des Zylinders greift am Querschnitt B' das Torsionsmoment M
G an.
b'a b
Hmax
B
l
B'
MK
r0
d FS
dr
dAU ( ) r r dK
dK
r
Umax
r0
Bild 2 Torsionsdraht Bild 3 Schubspannungen im Drahtquerschnitt
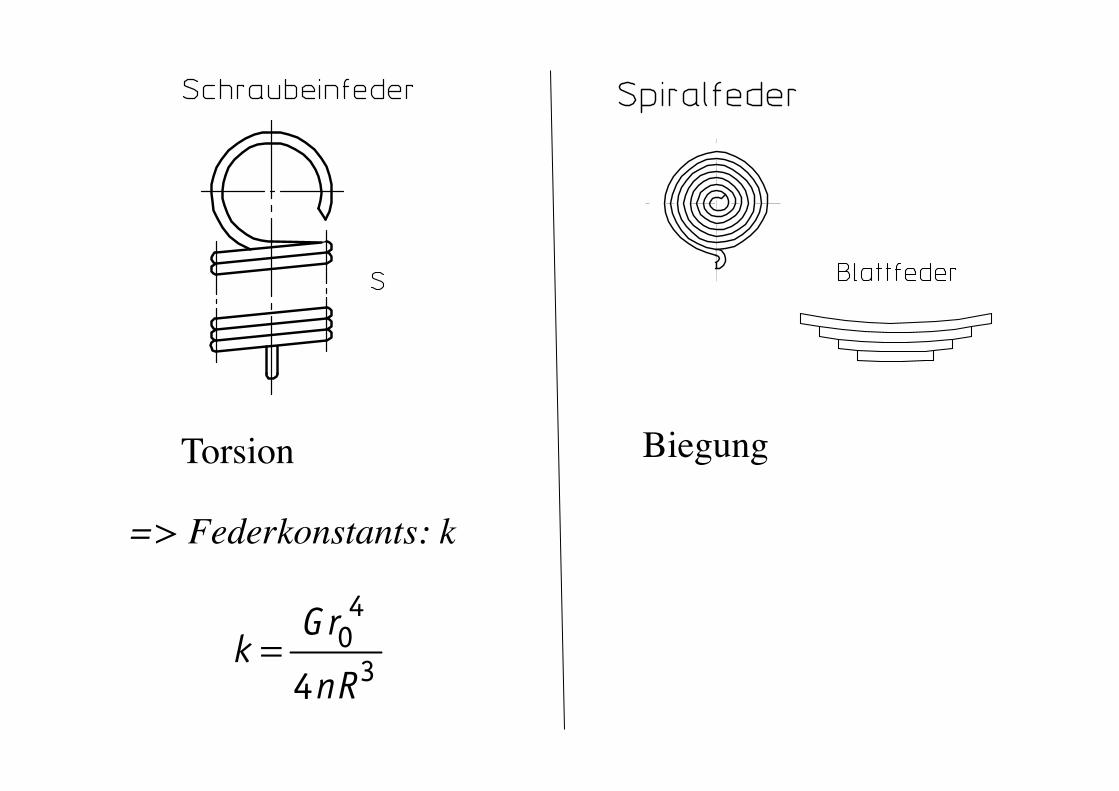
FedernÜberblick
Geräteelemente Prof. RedlichTorsion Biegung
=> Federkonstants: k
FedernÜberblick
Geräteelemente Prof. Redlich
FedernÜberblick
Geräteelemente Prof. Redlich
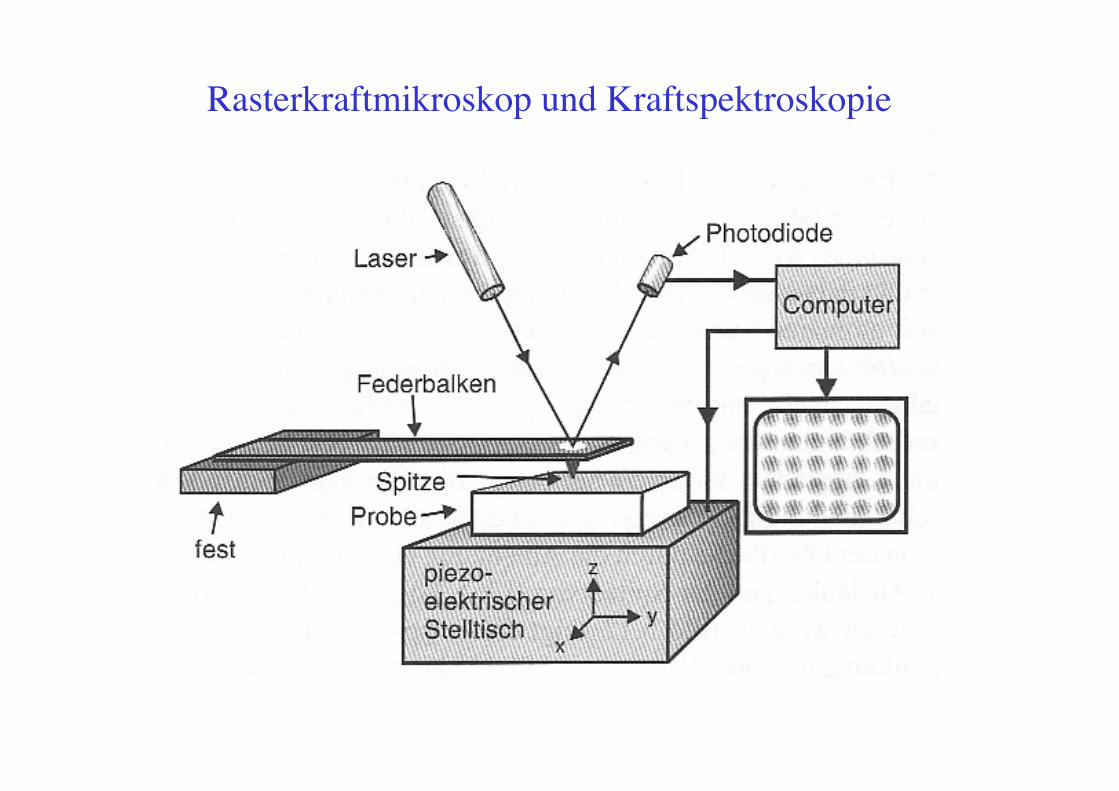
Rasterkraftmikroskop und Kraftspektroskopie
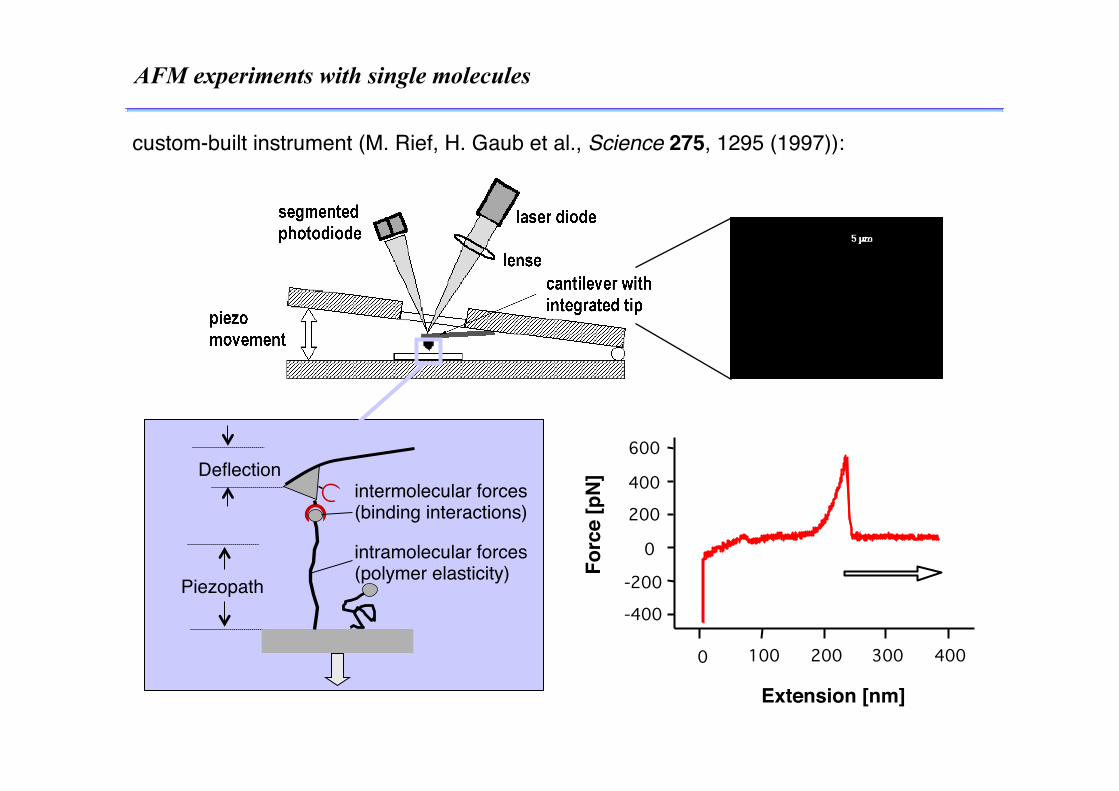
AFM experiments with single molecules
custom-built instrument (M. Rief, H. Gaub et al., Science 275, 1295 (1997)):
intermolecular forces(binding interactions)
intramolecular forces(polymer elasticity)
Deflection
Piezopath
Extension [nm]
4003002001000
600
-400
-200
0
200
400
Forc
e [p
N]
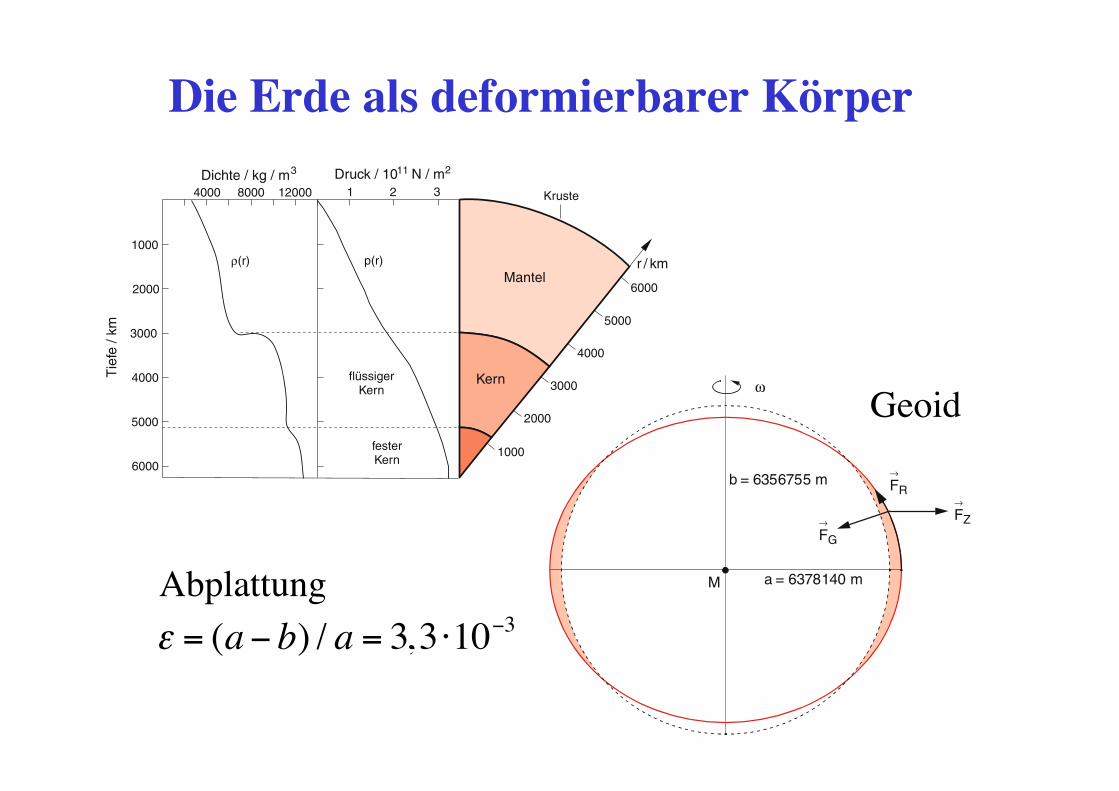
Die Erde als deformierbarer Körper 6.6. Die Erde als deformierbarer Körper 191
Mantel
Kern
r / km1000
2000
3000
4000
5000
Tie
fe /
km
4000 8000 12000 1 2 3
flüssigerKern
festerKern6000
Kruste
6000
5000
4000
3000
2000
1000
Dichte / kg / m Druck / 10 N / m
ρ(r) p(r)
3 11 2 Abb. 6.49. Querschnitt durch dieErde mit ihrem radialen Dichte-profil
aus Gravitationskraft FG, Zentrifugalkraft FZ und rück-treibender Verformungskraft FR Null wird (Abb. 6.50).Bei homogener Massenverteilung würde dadurch einRotationsellipsoid entstehen, dessen großer Durchmes-ser in der Äquatorebene
2a = 12 756,3 km
und dessen kleiner Durchmesser in Richtung derRotationsachse
2b = 12 713,5 km
b = 6356755 m
a = 6378140 mM
FG→ FZ
→FR→
ω
Abb. 6.50. Polabplattung der rotierenden Erde (stark übertrie-ben dargestellt)
beträgt. Die Abplattung ε = (a −b)/a des Rotations-ellipsoids ist deshalb ε = 3,353 · 10−3. Wegen derinhomogenen Massenverteilung weicht die Gestalt derErde etwas von dieser Ellipsoidform ab und bildet einenfast birnenförmigen Körper, der Geoid genannt wird(Abb. 2.56). Die Oberfläche dieses Geoids wird als Nor-malnull gewählt, von der aus alle Höhen auf der Erdegemessen werden [6.5].
6.6.2 Gezeitenverformung
Durch die zusätzlichen Gravitationskräfte, die Mondund Sonne auf die Erde ausüben, verformt sich die Erd-oberfläche in charakteristischer, zeitabhängiger Weise.Diese Verformung ist am deutlichsten auf den Weltmee-ren ausgeprägt (Ebbe und Flut), da bei Flüssigkeitendie rücktreibende elastische Verformungskraft fehlt, sietritt aber auch in der festen Erdkruste mit kleinererAuslenkung auf. Um diese um die Erde wanderndeGezeitenverformung genauer zu verstehen, behandelnwir zuerst den vereinfachten Spezialfall, in dem die Ei-genrotation der Erde und der Gravitationseinfluss derSonne nicht berücksichtigt werden.Unter dem Einflussder gegenseitigen Gravitationskraft
FG = −G · ME · MMo
r20
r0 (6.50)
bewegen sich Erde und Mond mit der Winkelgeschwin-digkeit Ω um ihren gemeinsamen Schwerpunkt S, dernoch im Inneren der Erde liegt (etwa 0,75 Erdradienvom Erdmittelpunkt). r0 ist der Abstand zwischen den
6.6. Die Erde als deformierbarer Körper 191
Mantel
Kern
r / km1000
2000
3000
4000
5000
Tie
fe /
km
4000 8000 12000 1 2 3
flüssigerKern
festerKern6000
Kruste
6000
5000
4000
3000
2000
1000
Dichte / kg / m Druck / 10 N / m
ρ(r) p(r)
3 11 2 Abb. 6.49. Querschnitt durch dieErde mit ihrem radialen Dichte-profil
aus Gravitationskraft FG, Zentrifugalkraft FZ und rück-treibender Verformungskraft FR Null wird (Abb. 6.50).Bei homogener Massenverteilung würde dadurch einRotationsellipsoid entstehen, dessen großer Durchmes-ser in der Äquatorebene
2a = 12 756,3 km
und dessen kleiner Durchmesser in Richtung derRotationsachse
2b = 12 713,5 km
b = 6356755 m
a = 6378140 mM
FG→ FZ
→FR→
ω
Abb. 6.50. Polabplattung der rotierenden Erde (stark übertrie-ben dargestellt)
beträgt. Die Abplattung ε = (a −b)/a des Rotations-ellipsoids ist deshalb ε = 3,353 · 10−3. Wegen derinhomogenen Massenverteilung weicht die Gestalt derErde etwas von dieser Ellipsoidform ab und bildet einenfast birnenförmigen Körper, der Geoid genannt wird(Abb. 2.56). Die Oberfläche dieses Geoids wird als Nor-malnull gewählt, von der aus alle Höhen auf der Erdegemessen werden [6.5].
6.6.2 Gezeitenverformung
Durch die zusätzlichen Gravitationskräfte, die Mondund Sonne auf die Erde ausüben, verformt sich die Erd-oberfläche in charakteristischer, zeitabhängiger Weise.Diese Verformung ist am deutlichsten auf den Weltmee-ren ausgeprägt (Ebbe und Flut), da bei Flüssigkeitendie rücktreibende elastische Verformungskraft fehlt, sietritt aber auch in der festen Erdkruste mit kleinererAuslenkung auf. Um diese um die Erde wanderndeGezeitenverformung genauer zu verstehen, behandelnwir zuerst den vereinfachten Spezialfall, in dem die Ei-genrotation der Erde und der Gravitationseinfluss derSonne nicht berücksichtigt werden.Unter dem Einflussder gegenseitigen Gravitationskraft
FG = −G · ME · MMo
r20
r0 (6.50)
bewegen sich Erde und Mond mit der Winkelgeschwin-digkeit Ω um ihren gemeinsamen Schwerpunkt S, dernoch im Inneren der Erde liegt (etwa 0,75 Erdradienvom Erdmittelpunkt). r0 ist der Abstand zwischen den
Geoid
Abplattungε = (a− b) / a = 3,3⋅10−3
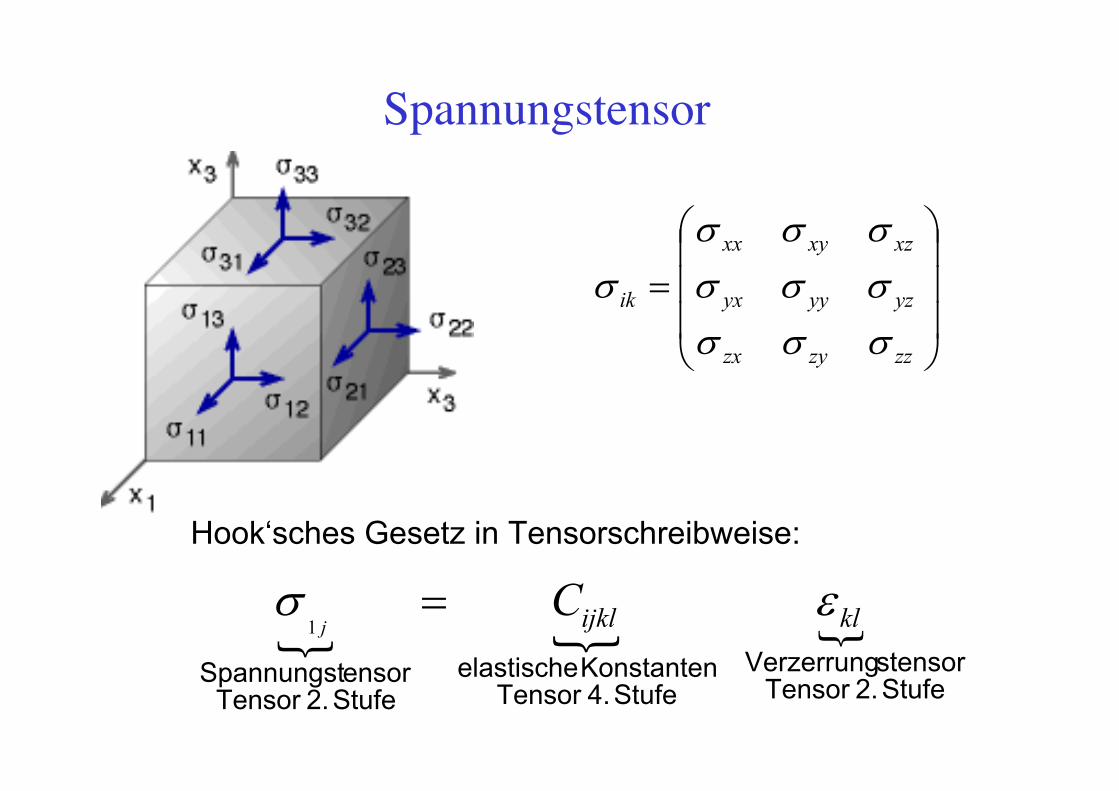
Spannungstensor
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
19. Lektion Ergänzung-7
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
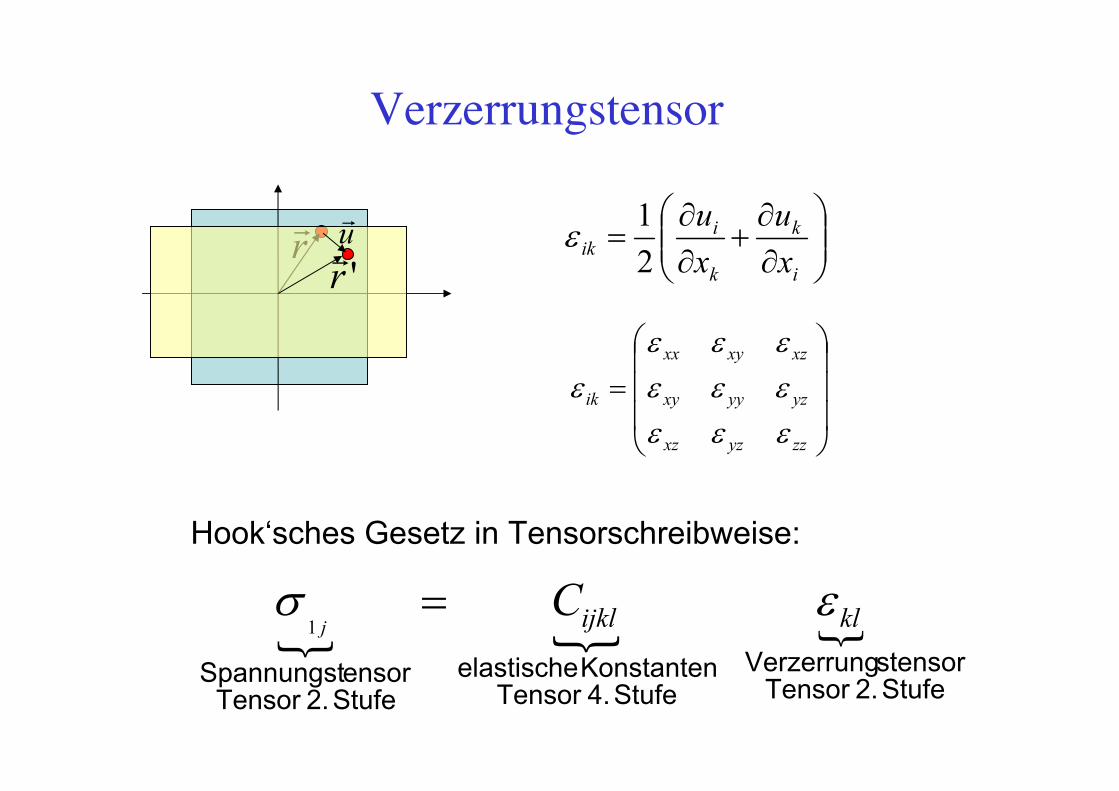
Hooke‘sches Gesetz
Hook‘sches Gesetz:
LLE ' V
Hook‘sches Gesetz in Tensorschreibweise:
, , ,
Stufe 2. TensorstensorVerzerrung
Stufe 4. TensorKonstanten elastische
Stufe 2. TensorensorSpannungst
klijklCj
HV 1
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
Spannungstensor
ikVRichtung der Normalkomponente der Fläche, auf die die Kraft wirkt
Richtung der Kraft
¸¸¸
¹
·
¨¨¨
©
§
zzzyzx
yzyyyx
xzxyxx
ik
VVVVVVVVV
V
Verzerrungstensor
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
Hooke‘sches Gesetz
Hook‘sches Gesetz:
LLE ' V
Hook‘sches Gesetz in Tensorschreibweise:
, , ,
Stufe 2. TensorstensorVerzerrung
Stufe 4. TensorKonstanten elastische
Stufe 2. TensorensorSpannungst
klijklCj
HV 1
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
Verzerrung
r&
'r&u& Verschiebung eines Körperpunktes
durch Deformation:
rrurr&&&&&
o '' und
Statt die Verschiebung eines Körperpunktes betrachten wir den Abstand zwischen zwei Körperpunkten vor und nach der Deformation:rd
&
'rd&2222 dzdydxrd
&
2222 '''' dzdydxrd &
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
Verzerrungstensor
ikikiiki
k
k
iii dxdxdxdxdx
xu
xu
dxdx H2212' 222 ¸
¸¹
·¨¨©
§¸¹
ᬩ
§ww
ww
Für kleine Verzerrungen kann man den quadratischen Term vernachlässigen und aus Symmetriegründen (iok = koi) bekommen wir:
Dabei ist :
¸¹
ᬩ
§ww
ww
i
k
k
iik x
uxu
21H
der Verzerrungstensor, d.h. ein Tensor 2. Stufe.
¸¸¸
¹
·
¨¨¨
©
§
zzyzxz
yzyyxy
xzxyxx
ik
HHHHHHHHH
H
H. Zabel 19. Lektion Spannungs- und Verzerrungstensor
Verzerrungstensor
ikikiiki
k
k
iii dxdxdxdxdx
xu
xu
dxdx H2212' 222 ¸
¸¹
·¨¨©
§¸¹
ᬩ
§ww
ww
Für kleine Verzerrungen kann man den quadratischen Term vernachlässigen und aus Symmetriegründen (iok = koi) bekommen wir:
Dabei ist :
¸¹
ᬩ
§ww
ww
i
k
k
iik x
uxu
21H
der Verzerrungstensor, d.h. ein Tensor 2. Stufe.
¸¸¸
¹
·
¨¨¨
©
§
zzyzxz
yzyyxy
xzxyxx
ik
HHHHHHHHH
H
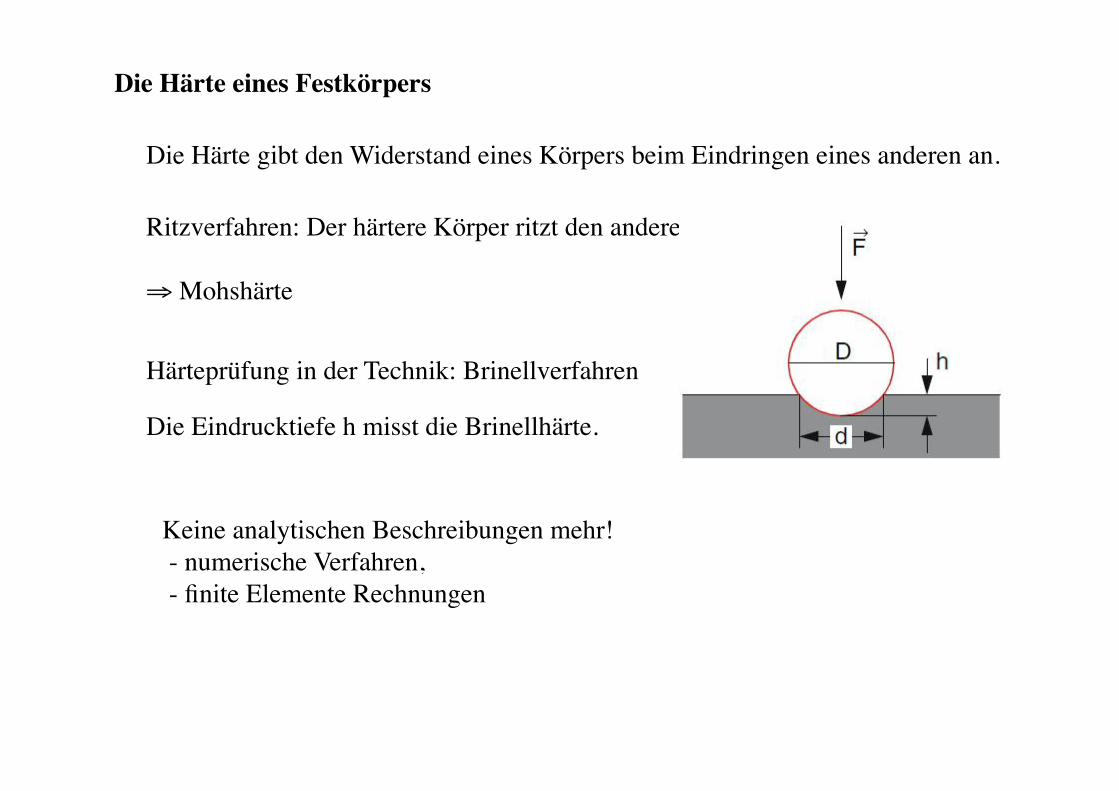
Die Härte eines Festkörpers
Die Härte gibt den Widerstand eines Körpers beim Eindringen eines anderen an.
Ritzverfahren: Der härtere Körper ritzt den anderen.
Die Eindrucktiefe h misst die Brinellhärte.
⇒ Mohshärte
Härteprüfung in der Technik: Brinellverfahren
Keine analytischen Beschreibungen mehr! - numerische Verfahren, - finite Elemente Rechnungen
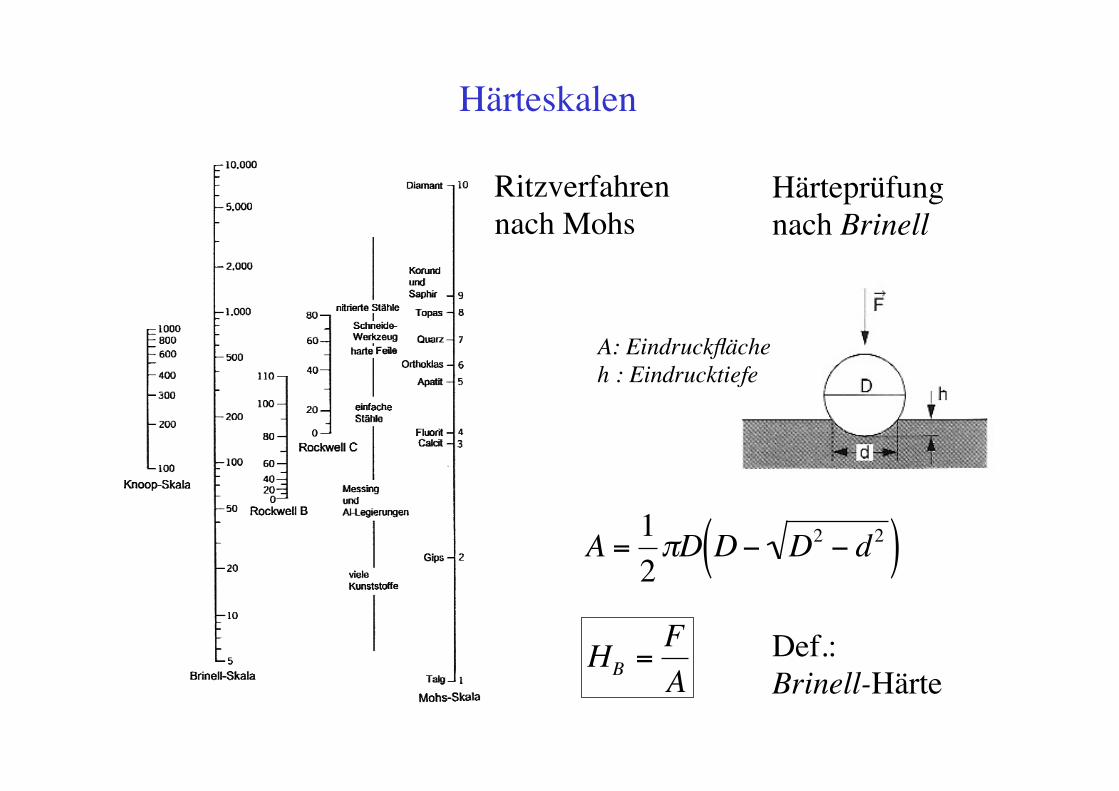
Ritzverfahren nach Mohs
Härteprüfung nach Brinell
€
A =12πD D− D2 − d2( )
Härteskalen
€
HB =FA
A: Eindruckflächeh : Eindrucktiefe
Def.: Brinell-Härte



![[ger] STATISTISCHE INFORMATIONEN : 1963-No. 1 [fre ...aei.pitt.edu/69145/1/1963.1.pdf · Prof. R. Wagenführ, Direttore generale ... Avvertenza Con questo numero le « Informazioni](https://static.fdocument.org/doc/165x107/5c6a20e509d3f20f7f8c2abd/ger-statistische-informationen-1963-no-1-fre-aeipittedu69145119631pdf.jpg)













