Dynamic aging simulation of Smart Power circuits · RRRR ΔR IIII III ββββ tttt dddd ...
22
Dynamic aging simulation of Smart Power circuits Dynamic aging simulation of Smart Power circuits Patricia Joris
Transcript of Dynamic aging simulation of Smart Power circuits · RRRR ΔR IIII III ββββ tttt dddd ...

Dynamic aging simulation of Smart Power circuits
Dynamic aging simulation of Smart Power circuits
Patricia Joris

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 2
Bringing reliability knowledge in the design process
Bringing reliability knowledge in the design process
• Introduction
• Modeling
• Implementation
• Validation
• Conclusion

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 3
Bringing reliability knowledge in the design process
Bringing reliability knowledge in the design process
• Introduction
– When/why is dynamic aging simulation useful?
– Principle of aging simulation
– Mechanism and devices under investigation
• Modeling
• Implementation
• Validation
• Conclusion

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 4
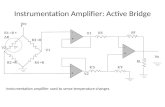
IntroductionIntroductionIntroduction
Two types of failure: (1) Catastrophic failure(2) Wear out
Ids
Vds
Vgs = 12V
Vgs = 8V
Vgs = 4V
Vgs = 2V
65 V 100 V
25 years
10K hours
100 hours
Wear out of DMOS-hot carrier degradation-Gate stress-Reverse bias
Forbidden area: bipolarturn-on for NDMOS
Equi-tfail lines for thermal damage

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 5
IntroductionIntroductionIntroduction
• Two degradation modes:
– Catastrophic failure
• Criterion = maximum defect density, minimum MTTF
• Design limitation : Safe Operating Area
– Wear out
• Criterion = maximum parametric drift
• Design limitation :
– Lifetime Dependent Safe Operating Area
– Dynamic Aging Simulation

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 6
Principle of dynamic aging simulation
Principle of dynamic Principle of dynamic
aging simulationaging simulation
• Monitor aging per device • Schematic back annotation• Aged model cards
• Netlist
• Stimuli
• Operational time tstress
• Operational temperature T
Transient circuit
simulation
Device Models
Reliability Models
•Key operation characteristic drift:
•Compact model parameter drift:
dt)T,t),t(Vg),t(Vd(AP
stresst
⋅=∆ ∫
( )( )
( )Pcorrp
....
Pcorrp
Pcorrp
n
2
1
∆=∆
∆=∆
∆=∆
Aged performance
Circuit simulation
•Identify weak spots
•Verify relevant reliability criteria
•Fully integrated, fastand easy
Learn about good design practices

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 7
Mechanism and devices under investigation
Mechanism and devices Mechanism and devices
under investigationunder investigation
Bosch:
•lateral NDMOS
•0.35um based CMOS
•Vds,max = 40V
•Vgs,max = 3.3V
Psubstrate
Ntub
Burried layer
Hot carrier injection
P+ N+ N+
PbodyNwell
B S G D
FOX
AMIS:
•lateral NDMOS
•0.7um based CMOS
•Vds,max = 40V
•Vgs,max = 12V
Pepi

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 8
Model 1: Key operation characteristic (Ron) drift
Model 1: Key operation Model 1: Key operation
characteristic (Rcharacteristic (Ronon) drift) drift
• Monitor key operation characteristics during DC stress experiments.
• Modified Goo model :
Age ~
• Step 1 : Extraction of α and β : non-linear least square fit
Cost function
nnnn2222
nnnn1111
on,0on,0on,0on,0onononon
AgeAgeAgeAgeCCCC1111AgeAgeAgeAgeCCCC
RRRRΔRΔRΔRΔR
⋅+
⋅=
( ) ( )∑ ≠
βαβα
∂
∂
−
∂
∂
⋅⋅−⋅⋅
ji),j,i(meas
jj,dj,subii,di,sub
measmeas
tIItII
jjjjon,0on,0on,0on,0ononononiiiion,0on,0on,0on,0onononon
ttttRRRR
ΔRΔRΔRΔR
ttttRRRR
ΔRΔRΔRΔR
ttttIIIIIIII ββββdddd
ααααsubsubsubsub ⋅⋅

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 9
Model 1: Key operation characteristic (Ron) drift
Model 1: Key operation Model 1: Key operation
characteristic (Rcharacteristic (Ronon) drift) drift
• Step 2 : Extraction of C1, C2 and n : non-linear least square fit
Cost function
– AMIS : C1, C2, n are Vg dependent
– Bosch : Fixed C1, C2 and n
• Step 3 : Polynomial fit through C1, C2 and n (AMIS)
))))RRRRΔRΔRΔRΔRmeasmeasmeasmeas
AAAACCCC1111AAAACCCC((((
iiiion,0on,0on,0on,0onononon
iiii nnnniiii2222
nnnniiii1111
−
⋅+
⋅∑

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 10
Model 1: Key operation characteristic (Ron) drift
Model 1: Key operation Model 1: Key operation
characteristic (Rcharacteristic (Ronon) drift) drift
• AMIS device:
RMS error = 3.3%
Step 1Step 2+3

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 11
Model 1: Key operation characteristic (Ron) drift
Model 1: Key operation Model 1: Key operation
characteristic (Rcharacteristic (Ronon) drift) drift
• Bosch results:
RMS error = 5.05%

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 12
Model 2: Compact model parameter drift
Model 2: Compact model Model 2: Compact model
parameter driftparameter drift
• Two methods to extract compact model parameters from key operation characteristics:
Neural Network
Approach
Controlled Source
Approach
Conclusion:
ononononserserserser ΔRΔRΔRΔRΔRΔRΔRΔR ∝

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 13
ImplementationImplementationImplementation
• Operation time and sampling period:
Operation time = period * #pulses
period
period
period
Simulation time

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 14
Implementation Implementation Implementation

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 15
ImplementationImplementationImplementation
• After each simulation event i, for each transistor j:– Calculate the Age rate of the last simulation interval δtj
– At the end of the operation time, the age of transistor j due tothe condition during this interval is
– Calculate the contribution of the condition to the total degradation
– Calculate the shift of the resistivity from the shift of the on-resistance:
( )( ) j,i
j,i
njij,ij,i,2
njij,ij,i,1
j,ipulses_rtrate_ageC1
pulses_rtrate_ageCP
⋅δ⋅⋅+
⋅δ⋅⋅=∆
βα⋅= j,ij,ij,i IdIsubrate_age
jij,ij,ij,i pulses_rtIdIsubage ⋅δ⋅⋅=βα
onres RCteR ∆⋅=∆

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 16
ImplementationImplementationImplementation

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 17
Validation (DC)Validation (DC)Validation (DC)
• Validation:

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 18
Validation (AC)Validation (AC)Validation (AC)
• Aging monitor:Experiment 1:
Vd=40V, Vg=0 – 12V, fVg =12.5KHz,
duty cycle = 80%, inductive load
Experiment 2:
Vd=40V, Vg = 0 – 12V, fVg =10KHz,
duty cycle = 50%, resistive load
Cum. stress duration =
88h
Cum. stress duration =
35h

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 19
Validation (AC)Validation (AC)Validation (AC)
• Aged performance:
Conclusion:
Resistive load: ∆∆∆∆Id,lin, sim = 1.4% vs ∆∆∆∆Id,lin, meas = 1.15%
Inductive load: ∆∆∆∆Id,lin, sim = 1.8% vs ∆∆∆∆Id,lin, meas = 1.55%

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 20
ConclusionConclusionConclusion
• Dynamic aging simulation is used to be bring reliability knowledge on wear out mechanisms in the design process
• The advantages of dynamic aging simulation are
– Reliability criteria in line with the application can be verified.
– Weak point in the design are indicated and this helps for identifying design failure mechanisms.
– The aged circuit simulation learns designers about good design practices.
– The tool is integrated in the design environment which makes it fast and easy to use.
• Degradation models and aged model cards are constructed based on DC data.
• The models are implemented in the software and are able to predict the shift of the degradation monitor and the aged devicebehavior after DC and AC stress experiments.

ESSDERC ’06, Montreux ROBUSPIC Workshop P. Joris – Slide 21
AcknowledgementsAcknowledgementsAcknowledgements
Many thanks to…
• C. Maier, H. Heinisch (Robert Bosch) and O. Jovic(UZag) for the Bosch contributions
• A. Baguenier (Cadence) for his participation in the coding of the reliability models
• Y. Singh (EPFL) for modeling and implementation of Isub
• S. Frère (AMIS) for the extraction of aged model parameters
• IWT Compose team for providing valuable
measurement data on the AMIS device

Questions?Questions?Questions?






![Antiasmatici [modalità compatibilità] · AMPc PDE AMP + ββββ-agonisti ... rispetto alla sola terapia con simpaticomimetico. ANTAGONISTI DEI RECETTORI MUSCARINICI IPRATROPIO](https://static.fdocument.org/doc/165x107/5ba299c109d3f2cc2e8c5a64/antiasmatici-modalita-compatibilita-ampc-pde-amp-agonisti-.jpg)